The design and making of a humanoid robotic hand
|
|
|
- Wilfred Clark
- 5 years ago
- Views:
Transcription

1 The design and making of a humanoid robotic hand presented by Tian Li Research associate Supervisor s Name: Prof. Nadia Magnenat Thalmann,Prof. Daniel Thalmann & Prof. Jianmin Zheng Project 2: Mixed Society of People, Virtual Humans, and Social Robots in Telepresence BeingTogether Centre Date of Presentation : 10 October 2017





2 BTC Task 2.4: Realistic Object Manipulation by a Social Robot in a Social Context Integration in a social robot of an articulated hand for grasping different types of objects. Vision-based detection, recognition and localisation of different types of objects Determination of a strategy for reaching and grasping the object in a human-like way 2


3 Target Static - Looks like human hand Solution: Use silicon artificial skin Dynamic - Moves like human hand Solution: design and making of a humanoid robotic hand Criteria: Dimensions, Degree of freedom(dof), Joints structure and motion range, move accuracy and speed. Other requirement light weight, low cost, easy to make, easy to control
![Related works Shadow Hand[1] Xu Zhe hand[2] Bebionic hand[3] 40](/docs-images/94/120353918/images/4-3.jpg "actuators(20 DOFs) Highly biomimetic Robust and compact [1] Shadow hand:")


4 Related works Shadow Hand[1] Xu Zhe hand[2] Bebionic hand[3] 40 actuators(20 DOFs) Highly biomimetic Robust and compact [1] Shadow hand: [2] Zhe Xu and Emanuel Todorov, Design of a highly biomimetic anthropomorphic robotic hand towards artificial limb regeneration 2016 IEEE International Conference on Robotics and Automation (ICRA) [3] Bebionic hand:
 Proximal interphalangeal joint (PIP)")
 Metacarpal-phalangeal")

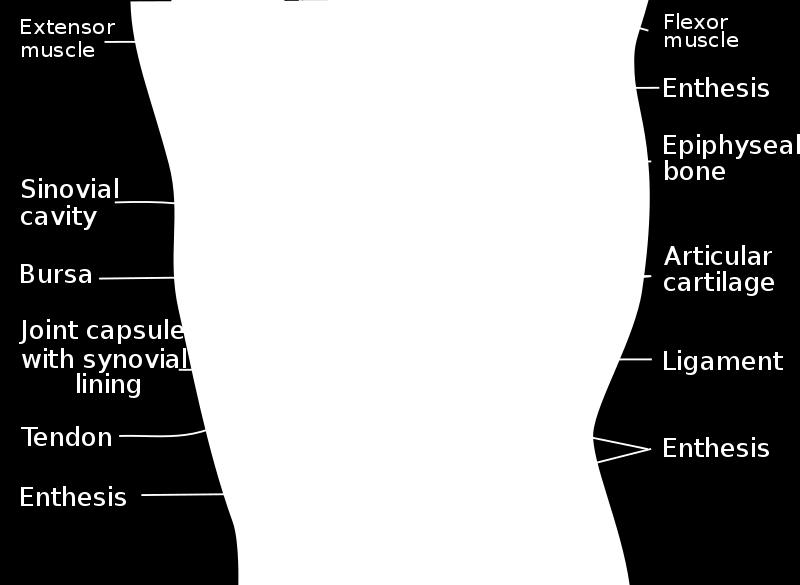
5 How does hand work mechanism Metacarpal-phalangeal joint (MCP) Proximal interphalangeal joint (PIP) Distal interphalangeal joint (DIP) Carpal-metacarpal joint (CMC) Metacarpal-phalangeal joint (MCP) Interphalangeal joint (IP) 15 movable joints, 20DOFs, 27 bones








6 Mechanism design - interlock

7 How does hand work actuation Fingers do not contain muscles (other than arrector pili). The muscles that move the finger joints are in the palm and forearm. The long tendons that deliver motion from the forearm muscles may be observed to move under the skin at the wrist and on the back of the hand. (From Finger - Wikipedia)





8 Actuation design cable-driven Total DOFs reduced from 20 to 6 One cable control 3 joints Thumb have 2 cables



9 Nadine hand conclusion Humanlike mechanical design Dimensions, joints, motion factors Simple actuation method - Cable driven, six actuators 3D printable Low cost, fast, light, motion range control Single model with interlock joint No assemble required Artificial skin compatible
![Nadine hand - originality [3]](/docs-images/94/120353918/images/10-3.jpg "http://inmoov.")
![fr/ [1]Xu, Zhe, Vikash Kumar, and Emanuel](/docs-images/94/120353918/images/10-4.jpg "Todorov.")

, 2013 13th")

![[2] Zhe Xu and Emanuel Todorov, Design of](/docs-images/94/120353918/images/10-8.jpg "a highly biomimetic anthropomorphic")
10 Nadine hand - originality [3] [1]Xu, Zhe, Vikash Kumar, and Emanuel Todorov. "A low-cost and modular, 20-DOF anthropomorphic robotic hand: design, actuation and modeling." Humanoid Robots (Humanoids), th IEEE-RAS International Conference on. IEEE, [2] Zhe Xu and Emanuel Todorov, Design of a highly biomimetic anthropomorphic robotic hand towards artificial limb regeneration 2016 IEEE International Conference on Robotics and Automation (ICRA) Single interlocked model



11 Servo bed design HS-5070MH 23.6 x 11.6 x 29mm, 12.5g, 3.8 kg.cm HK15298B 117 x 20 x 80mm 66g, 20 kg.cm Magnenat Thalmann, N., Tian, L., & Yao, F. (2017). Nadine: A Social Robot that Can Localize Objects and Grasp Them in a Human Way Frontiers in Electronic Technologies (pp. 1-23): Springer.
12 Comparisons Hand Developer Mass(g) Size (length x width x thickness, mm) Number of Joints DOF Number of Actuators Actuatio n Method Material Nadine hand NTU IMI x 70 x 13(without artificial skin) DC Motor - Tendons 3D print ABS Shadow Hand Xu Zhe s hand SHADOW ROBOT COMPANY > x 98 x pneumati c motor - Tendons Xu Zhe 942 No data (Human size) DC Motor - Tendons Metal + plastic 3D print ABS + Laser-cut tissues (rubber) Bebionic (2014) RSL steeper >550 ~200 x 92 x DC Motor - Lead Screw Metal
![Grasp test (1) [1]Cutkosky, M.R., On Grasp Choice, Grasp Models, and the Design of Hands for Manufacturing Tasks. Ieee Transactions on Robotics and Automation, 1989. 5(3): p.](/docs-images/94/120353918/images/13-3.jpg "269-279. [2]Li Tian, Nadia Magnenat Thalmann, Daniel Thalmann, Jianmin Zheng, The making of a humanoid hand: problems and solutions, submitted to Front. Robot. AI at 18 May")
13 Grasp test (1) [1]Cutkosky, M.R., On Grasp Choice, Grasp Models, and the Design of Hands for Manufacturing Tasks. Ieee Transactions on Robotics and Automation, (3): p [2]Li Tian, Nadia Magnenat Thalmann, Daniel Thalmann, Jianmin Zheng, The making of a humanoid hand: problems and solutions, submitted to Front. Robot. AI at 18 May
![Grasp test (2) The test is based on Cutkosky s hand taxonomy. It shows our robotic hand can grasp in all 16 grasp gestures. [1]Cutkosky, M.R.](/docs-images/94/120353918/images/14-3.jpg ", On Grasp Choice, Grasp Models, and the Design of Hands for Manufacturing Tasks. Ieee Transactions on Robotics and Automation, 1989. 5(3): p. 269-279.")
14 Grasp test (2) The test is based on Cutkosky s hand taxonomy. It shows our robotic hand can grasp in all 16 grasp gestures. [1]Cutkosky, M.R., On Grasp Choice, Grasp Models, and the Design of Hands for Manufacturing Tasks. Ieee Transactions on Robotics and Automation, (3): p [2]Li Tian, Nadia Magnenat Thalmann, Daniel Thalmann, Jianmin Zheng, The making of a humanoid hand: problems and solutions, submitted to Front. Robot. AI at 18 May

15 Grasp test demos
16 Thank you! Q&A
DEVELOPING UPPER LIMBS FOR SOCIAL HUMANOID ROBOT NADINE
 DEVELOPING UPPER LIMBS FOR SOCIAL HUMANOID ROBOT NADINE Presenter: Anoop Kumar Sinha PhD Student (BTC) (2018-2022) Supervisors: Assoc. Prof. Cai Yiyu (MAE) Prof. Nadia Magnenat-Thalmann (Director, IMI)
DEVELOPING UPPER LIMBS FOR SOCIAL HUMANOID ROBOT NADINE Presenter: Anoop Kumar Sinha PhD Student (BTC) (2018-2022) Supervisors: Assoc. Prof. Cai Yiyu (MAE) Prof. Nadia Magnenat-Thalmann (Director, IMI)
2 Human hand. 2. Palm bones (metacarpals, metacarpus in Latin) these bones include 5 bones called metacarpal bones (or simply metacarpals).
 these bones include 5 bones called metacarpal bones (or simply metacarpals).") 2 Human hand Since this work deals with direct manipulation, i.e. manipulation using hands, obviously human hands are of crucial importance for this exposition. In order to approach the research and development
2 Human hand Since this work deals with direct manipulation, i.e. manipulation using hands, obviously human hands are of crucial importance for this exposition. In order to approach the research and development
Humanoid Hands. CHENG Gang Dec Rollin Justin Robot.mp4
 Humanoid Hands CHENG Gang Dec. 2009 Rollin Justin Robot.mp4 Behind the Video Motivation of humanoid hand Serve the people whatever difficult Behind the Video Challenge to humanoid hand Dynamics How to
Humanoid Hands CHENG Gang Dec. 2009 Rollin Justin Robot.mp4 Behind the Video Motivation of humanoid hand Serve the people whatever difficult Behind the Video Challenge to humanoid hand Dynamics How to
Design and Control of the BUAA Four-Fingered Hand
 Proceedings of the 2001 IEEE International Conference on Robotics & Automation Seoul, Korea May 21-26, 2001 Design and Control of the BUAA Four-Fingered Hand Y. Zhang, Z. Han, H. Zhang, X. Shang, T. Wang,
Proceedings of the 2001 IEEE International Conference on Robotics & Automation Seoul, Korea May 21-26, 2001 Design and Control of the BUAA Four-Fingered Hand Y. Zhang, Z. Han, H. Zhang, X. Shang, T. Wang,
Towards the Development of a Minimal Anthropomorphic Robot Hand
 2014 14th IEEE-RAS International Conference on Humanoid Robots (Humanoids) November 18-20, 2014. Madrid, Spain Towards the Development of a Minimal Anthropomorphic Robot Hand Donald Dalli, Student Member,
2014 14th IEEE-RAS International Conference on Humanoid Robots (Humanoids) November 18-20, 2014. Madrid, Spain Towards the Development of a Minimal Anthropomorphic Robot Hand Donald Dalli, Student Member,
Soft Bionics Hands with a Sense of Touch Through an Electronic Skin
 Soft Bionics Hands with a Sense of Touch Through an Electronic Skin Mahmoud Tavakoli, Rui Pedro Rocha, João Lourenço, Tong Lu and Carmel Majidi Abstract Integration of compliance into the Robotics hands
Soft Bionics Hands with a Sense of Touch Through an Electronic Skin Mahmoud Tavakoli, Rui Pedro Rocha, João Lourenço, Tong Lu and Carmel Majidi Abstract Integration of compliance into the Robotics hands
Development of Multi-fingered Hand for Life-size Humanoid Robots
 2007 IEEE International Conference on Robotics and Automation Roma, Italy, 10-14 April 2007 WeC7.2 Development of Multi-fingered Hand for Life-size Humanoid Robots Kenji KANEKO, Kensuke HARADA, and Fumio
2007 IEEE International Conference on Robotics and Automation Roma, Italy, 10-14 April 2007 WeC7.2 Development of Multi-fingered Hand for Life-size Humanoid Robots Kenji KANEKO, Kensuke HARADA, and Fumio
RAPID PROTOTYPING AND EMBEDDED CONTROL FOR AN ANTHROPOMORPHIC ROBOTIC HAND
 The 3rd International Conference on Computational Mechanics and Virtual Engineering COMEC 2009 29 30 OCTOBER 2009, Brasov, Romania RAPID PROTOTYPING AND EMBEDDED CONTROL FOR AN ANTHROPOMORPHIC ROBOTIC
The 3rd International Conference on Computational Mechanics and Virtual Engineering COMEC 2009 29 30 OCTOBER 2009, Brasov, Romania RAPID PROTOTYPING AND EMBEDDED CONTROL FOR AN ANTHROPOMORPHIC ROBOTIC
OPTIMUM DESIGN OF 1-DOF ANTHROPOMORPHIC THUMB CONSIDERING GRASPING MOTION FOR INDONESIAN LOW-COST PROSTHETIC HAND
 Proceeding, 6 th International Seminar on Industrial Engineering and Management Harris Hotel, Batam, Indonesia, February 12th-14th, 2013 ISSN : 1978-774X OPTIMUM DESIGN OF 1-DOF ANTHROPOMORPHIC THUMB CONSIDERING
Proceeding, 6 th International Seminar on Industrial Engineering and Management Harris Hotel, Batam, Indonesia, February 12th-14th, 2013 ISSN : 1978-774X OPTIMUM DESIGN OF 1-DOF ANTHROPOMORPHIC THUMB CONSIDERING
The Development of a Low Cost Pneumatic Air Muscle Actuated Anthropomorphic Robotic Hand
 Available online at www.sciencedirect.com Procedia Engineering 41 (2012 ) 737 742 International Symposium on Robotics and Intelligent Sensors 2012 (IRIS 2012) The Development of a Low Cost Pneumatic Air
Available online at www.sciencedirect.com Procedia Engineering 41 (2012 ) 737 742 International Symposium on Robotics and Intelligent Sensors 2012 (IRIS 2012) The Development of a Low Cost Pneumatic Air
Proprioception & force sensing
 Proprioception & force sensing Roope Raisamo Tampere Unit for Computer-Human Interaction (TAUCHI) School of Information Sciences University of Tampere, Finland Based on material by Jussi Rantala, Jukka
Proprioception & force sensing Roope Raisamo Tampere Unit for Computer-Human Interaction (TAUCHI) School of Information Sciences University of Tampere, Finland Based on material by Jussi Rantala, Jukka
Dexterous Anthropomorphic Robot Hand With Distributed Tactile Sensor: Gifu Hand II
 296 IEEE/ASME TRANSACTIONS ON MECHATRONICS, VOL. 7, NO. 3, SEPTEMBER 2002 Dexterous Anthropomorphic Robot Hand With Distributed Tactile Sensor: Gifu Hand II Haruhisa Kawasaki, Tsuneo Komatsu, and Kazunao
296 IEEE/ASME TRANSACTIONS ON MECHATRONICS, VOL. 7, NO. 3, SEPTEMBER 2002 Dexterous Anthropomorphic Robot Hand With Distributed Tactile Sensor: Gifu Hand II Haruhisa Kawasaki, Tsuneo Komatsu, and Kazunao
Five-fingered Robot Hand using Ultrasonic Motors and Elastic Elements *
 Proceedings of the 2005 IEEE International Conference on Robotics and Automation Barcelona, Spain, April 2005 Five-fingered Robot Hand using Ultrasonic Motors and Elastic Elements * Ikuo Yamano Department
Proceedings of the 2005 IEEE International Conference on Robotics and Automation Barcelona, Spain, April 2005 Five-fingered Robot Hand using Ultrasonic Motors and Elastic Elements * Ikuo Yamano Department
Design of an Anthropomorphic Dexterous Hand for a 2-Years-Old Humanoid: Ongoing Work
 Design of an Anthropomorphic Dexterous Hand for a 2-Years-Old Humanoid: Ongoing Work Giovanni Stellin 1, Christian Cipriani 1,2, Franco Zaccone 1, M. C. Carrozza 1, Cecilia Laschi 1 and Paolo Dario 1,3
Design of an Anthropomorphic Dexterous Hand for a 2-Years-Old Humanoid: Ongoing Work Giovanni Stellin 1, Christian Cipriani 1,2, Franco Zaccone 1, M. C. Carrozza 1, Cecilia Laschi 1 and Paolo Dario 1,3
Design and Controll of Haptic Glove with McKibben Pneumatic Muscle
 XXVIII. ASR '2003 Seminar, Instruments and Control, Ostrava, May 6, 2003 173 Design and Controll of Haptic Glove with McKibben Pneumatic Muscle KOPEČNÝ, Lukáš Ing., Department of Control and Instrumentation,
XXVIII. ASR '2003 Seminar, Instruments and Control, Ostrava, May 6, 2003 173 Design and Controll of Haptic Glove with McKibben Pneumatic Muscle KOPEČNÝ, Lukáš Ing., Department of Control and Instrumentation,
i-limb quantum precision. power. intelligent motion. The first multi-articulating prosthesis that can be controlled with simple gestures.
 i-limb quantum precision. power. intelligent motion. The first multi-articulating prosthesis that can be controlled with simple gestures. precision. Five independently motorized fingers with an electronically
i-limb quantum precision. power. intelligent motion. The first multi-articulating prosthesis that can be controlled with simple gestures. precision. Five independently motorized fingers with an electronically
Low Cost Robotic Hand that Senses Heat and Pressure
 Low Cost Robotic Hand that Senses Heat and Pressure David Lanigan and Yonas Tadesse Humanoid, Biorobotics and Smart Systems (HBS) Lab, Mechanical Engineering Department The University of Texas at Dallas,
Low Cost Robotic Hand that Senses Heat and Pressure David Lanigan and Yonas Tadesse Humanoid, Biorobotics and Smart Systems (HBS) Lab, Mechanical Engineering Department The University of Texas at Dallas,
Introduction of a Gel Actuator for Use in the Design of a Humanoid Robotic Finger
 Introduction of a Gel Actuator for Use in the Design of a Humanoid Robotic Finger Danielle Castley, Dr. Paul Oh Mechanical Engineering and Mechanics, Drexel University Philadelphia, PA 19104, USA ABSTRACT
Introduction of a Gel Actuator for Use in the Design of a Humanoid Robotic Finger Danielle Castley, Dr. Paul Oh Mechanical Engineering and Mechanics, Drexel University Philadelphia, PA 19104, USA ABSTRACT
ADVANCED CABLE-DRIVEN SENSING ARTIFICIAL HANDS FOR EXTRA VEHICULAR AND EXPLORATION ACTIVITIES
 In Proceedings of the 9th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2006' ESTEC, Noordwijk, The Netherlands, November 28-30, 2006 ADVANCED CABLE-DRIVEN SENSING ARTIFICIAL
In Proceedings of the 9th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2006' ESTEC, Noordwijk, The Netherlands, November 28-30, 2006 ADVANCED CABLE-DRIVEN SENSING ARTIFICIAL
DESIGN OF A 2-FINGER HAND EXOSKELETON FOR VR GRASPING SIMULATION
 DESIGN OF A 2-FINGER HAND EXOSKELETON FOR VR GRASPING SIMULATION Panagiotis Stergiopoulos Philippe Fuchs Claude Laurgeau Robotics Center-Ecole des Mines de Paris 60 bd St-Michel, 75272 Paris Cedex 06,
DESIGN OF A 2-FINGER HAND EXOSKELETON FOR VR GRASPING SIMULATION Panagiotis Stergiopoulos Philippe Fuchs Claude Laurgeau Robotics Center-Ecole des Mines de Paris 60 bd St-Michel, 75272 Paris Cedex 06,
World Automation Congress
 ISORA028 Main Menu World Automation Congress Tenth International Symposium on Robotics with Applications Seville, Spain June 28th-July 1st, 2004 Design And Experiences With DLR Hand II J. Butterfaß, M.
ISORA028 Main Menu World Automation Congress Tenth International Symposium on Robotics with Applications Seville, Spain June 28th-July 1st, 2004 Design And Experiences With DLR Hand II J. Butterfaß, M.
Development of an Anthropomorphic Gripping Manipulator: The Analysis of Implementation Methods
 American Journal of Applied Sciences Original Research Paper Development of an Anthropomorphic Gripping Manipulator: The Analysis of Implementation Methods 1 Ivan Vladimirovich Krechetov, 2 Arkady Alekseevich
American Journal of Applied Sciences Original Research Paper Development of an Anthropomorphic Gripping Manipulator: The Analysis of Implementation Methods 1 Ivan Vladimirovich Krechetov, 2 Arkady Alekseevich
ROMEO Humanoid for Action and Communication. Rodolphe GELIN Aldebaran Robotics
 ROMEO Humanoid for Action and Communication Rodolphe GELIN Aldebaran Robotics 7 th workshop on Humanoid November Soccer 2012 Robots Osaka, November 2012 Overview French National Project labeled by Cluster
ROMEO Humanoid for Action and Communication Rodolphe GELIN Aldebaran Robotics 7 th workshop on Humanoid November Soccer 2012 Robots Osaka, November 2012 Overview French National Project labeled by Cluster
Design and Control of an Anthropomorphic Robotic Arm
 Journal Of Industrial Engineering Research ISSN- 2077-4559 Journal home page: http://www.iwnest.com/ijer/ 2016. 2(1): 1-8 RSEARCH ARTICLE Design and Control of an Anthropomorphic Robotic Arm Simon A/L
Journal Of Industrial Engineering Research ISSN- 2077-4559 Journal home page: http://www.iwnest.com/ijer/ 2016. 2(1): 1-8 RSEARCH ARTICLE Design and Control of an Anthropomorphic Robotic Arm Simon A/L
Design of a Compliant and Force Sensing Hand for a Humanoid Robot
 Design of a Compliant and Force Sensing Hand for a Humanoid Robot Aaron Edsinger-Gonzales Computer Science and Artificial Intelligence Laboratory, assachusetts Institute of Technology E-mail: edsinger@csail.mit.edu
Design of a Compliant and Force Sensing Hand for a Humanoid Robot Aaron Edsinger-Gonzales Computer Science and Artificial Intelligence Laboratory, assachusetts Institute of Technology E-mail: edsinger@csail.mit.edu
Mechatronics and Automatic Control Laboratory (MACLAB) University of Genova
 University of Genova") Mechatronics and Automatic Control Laboratory (MACLAB) University of Genova Prof. Giorgio Cannata Introduction These notes are a short presentation of the DIST department of the University of Genova (Italy),
Mechatronics and Automatic Control Laboratory (MACLAB) University of Genova Prof. Giorgio Cannata Introduction These notes are a short presentation of the DIST department of the University of Genova (Italy),
Grasping Objects Using Shadow Dexterous Hand with Tactile Feedback
 Grasping Objects Using Shadow Dexterous Hand with Tactile Feedback Sivakumar k 1, Priyanka Ch 2 P.G. Student, School of Mechanical and Building Sciences, VIT University, Chennai, India 1 Assistant Professor,
Grasping Objects Using Shadow Dexterous Hand with Tactile Feedback Sivakumar k 1, Priyanka Ch 2 P.G. Student, School of Mechanical and Building Sciences, VIT University, Chennai, India 1 Assistant Professor,
NAIST Openhand M2S: A versatile two-finger gripper adapted for pulling and tucking textiles
 2017 First IEEE International Conference on Robotic Computing NAIST Openhand M2S: A versatile two-finger gripper adapted for pulling and tucking textiles Felix von Drigalski, Daiki Yoshioka, Wataru Yamazaki,
2017 First IEEE International Conference on Robotic Computing NAIST Openhand M2S: A versatile two-finger gripper adapted for pulling and tucking textiles Felix von Drigalski, Daiki Yoshioka, Wataru Yamazaki,
An Intelligent Prosthetic Hand using Hybrid Actuation and Myoelectric Control
 An Intelligent Prosthetic Hand using Hybrid Actuation and Myoelectric Control by Beng Guey Lau Submitted in accordance with the requirements for the degree of Doctor of Philosophy The University of Leeds
An Intelligent Prosthetic Hand using Hybrid Actuation and Myoelectric Control by Beng Guey Lau Submitted in accordance with the requirements for the degree of Doctor of Philosophy The University of Leeds
Course Details. Robotics is Interdisciplinary. Brief History of Robotics. Lecture 01 Robotics. Robotics 70% (WE) - 30% (CA)
 - 30% (CA)") Course Details Lecture 01 Robotics 70% (WE) - 30% (CA) Contents : Overview of Robotics, Robot Manipulator Modeling (kinematics), Robot Control (position and force), obstacle avoidance (mobile robots) MatLab
Course Details Lecture 01 Robotics 70% (WE) - 30% (CA) Contents : Overview of Robotics, Robot Manipulator Modeling (kinematics), Robot Control (position and force), obstacle avoidance (mobile robots) MatLab
Lecture 7: Human haptics
 ME 327: Design and Control of Haptic Systems Winter 2018 Lecture 7: Human haptics Allison M. Okamura Stanford University types of haptic sensing kinesthesia/ proprioception/ force cutaneous/ tactile Related
ME 327: Design and Control of Haptic Systems Winter 2018 Lecture 7: Human haptics Allison M. Okamura Stanford University types of haptic sensing kinesthesia/ proprioception/ force cutaneous/ tactile Related
DESIGN, ACTUATION, AND CONTROL OF A COMPLEX HAND MECHANISM. by Jason Dean Potratz
 DESIGN, ACTUATION, AND CONTROL OF A COMPLEX HAND MECHANISM by Jason Dean Potratz A thesis submitted in partial fulfillment of the requirements for the Master of Science degree in Mechanical Engineering
DESIGN, ACTUATION, AND CONTROL OF A COMPLEX HAND MECHANISM by Jason Dean Potratz A thesis submitted in partial fulfillment of the requirements for the Master of Science degree in Mechanical Engineering
Android application for mobile phones to communicate with Glove pattern and the FUM BIONIC HAND
 Android application for mobile phones to communicate with Glove pattern and the FUM BIONIC HAND Saeed Bahrami Moqadam Department of electrical and computer Hakim Sabzevari University, M.S Sabzevar, Iran
Android application for mobile phones to communicate with Glove pattern and the FUM BIONIC HAND Saeed Bahrami Moqadam Department of electrical and computer Hakim Sabzevari University, M.S Sabzevar, Iran
The Robonaut Hand: A Dexterous Robot Hand For Space
 Proceedings of the 1999 IEEE International Conference on Robotics & Automation Detroit, Michigan May 1999 The Robonaut Hand: A Dexterous Robot Hand For Space C. S. Lovchik Robotics Technology Branch NASA
Proceedings of the 1999 IEEE International Conference on Robotics & Automation Detroit, Michigan May 1999 The Robonaut Hand: A Dexterous Robot Hand For Space C. S. Lovchik Robotics Technology Branch NASA
Robot Hands: Mechanics, Contact Constraints, and Design for Open-loop Performance
 Robot Hands: Mechanics, Contact Constraints, and Design for Open-loop Performance Aaron M. Dollar John J. Lee Associate Professor of Mechanical Engineering and Materials Science Aerial Robotics Yale GRAB
Robot Hands: Mechanics, Contact Constraints, and Design for Open-loop Performance Aaron M. Dollar John J. Lee Associate Professor of Mechanical Engineering and Materials Science Aerial Robotics Yale GRAB
vhand: A Human Hand Simulation System
 vhand: A Human Hand Simulation System Beifang Yi Frederick C. Harris, Jr. Sergiu M. Dascalu Department of Computer Science & Engineering University of Nevada, Reno Reno, NV 89557 {b yi, fredh, dascalus}@cse.unr.edu
vhand: A Human Hand Simulation System Beifang Yi Frederick C. Harris, Jr. Sergiu M. Dascalu Department of Computer Science & Engineering University of Nevada, Reno Reno, NV 89557 {b yi, fredh, dascalus}@cse.unr.edu
EXOBOTS AND ROBONAUTS: THE NEXT WAVE IN THE SEARCH FOR EXTRATERRESTRIALS
 EXOBOTS AND ROBONAUTS: THE NEXT WAVE IN THE SEARCH FOR EXTRATERRESTRIALS Presented By : B.GOPYA College: Usha Rama College of Engineering and technology. Branch & Year: ECE-III YEAR E-Mail: battegopya@gmail.com
EXOBOTS AND ROBONAUTS: THE NEXT WAVE IN THE SEARCH FOR EXTRATERRESTRIALS Presented By : B.GOPYA College: Usha Rama College of Engineering and technology. Branch & Year: ECE-III YEAR E-Mail: battegopya@gmail.com
Curiosity Guide #306 Skeletal System
 Curiosity Guide #306 Skeletal System Accompanies Curious Crew, Season 3, Episode 6 (#306) Model Hand Investigation #5 Description Make a movable model of a hand to learn more about how tendons work with
Curiosity Guide #306 Skeletal System Accompanies Curious Crew, Season 3, Episode 6 (#306) Model Hand Investigation #5 Description Make a movable model of a hand to learn more about how tendons work with
A Musculoskeletal Flexible-Spine Humanoid Kotaro Aiming at the Future in 15 years time
 A Musculoskeletal Flexible-Spine Humanoid Kotaro Aiming at the Future in 15 years time 3 Ikuo Mizuuchi Department of Mechano-Informatics, The University of Tokyo Japan 1. Introduction Recently, humanoid
A Musculoskeletal Flexible-Spine Humanoid Kotaro Aiming at the Future in 15 years time 3 Ikuo Mizuuchi Department of Mechano-Informatics, The University of Tokyo Japan 1. Introduction Recently, humanoid
An Underactuated Hand for Efficient Finger-Gaiting-Based Dexterous Manipulation
 Proceedings of the 2014 IEEE International Conference on Robotics and Biomimetics December 5-10, 2014, Bali, Indonesia An Underactuated Hand for Efficient Finger-Gaiting-Based Dexterous Manipulation Raymond
Proceedings of the 2014 IEEE International Conference on Robotics and Biomimetics December 5-10, 2014, Bali, Indonesia An Underactuated Hand for Efficient Finger-Gaiting-Based Dexterous Manipulation Raymond
Preliminary Design of an Anthropomorphic Dexterous Hand for a 2-Years-Old Humanoid: towards Cognition
 Preliminary Design of an Anthropomorphic Dexterous Hand for a 2-Years-Old Humanoid: towards Cognition Giovanni Stellin, Giovanni Cappiello, Stefano Roccella, Maria Chiara Carrozza, Paolo Dario Giorgio
Preliminary Design of an Anthropomorphic Dexterous Hand for a 2-Years-Old Humanoid: towards Cognition Giovanni Stellin, Giovanni Cappiello, Stefano Roccella, Maria Chiara Carrozza, Paolo Dario Giorgio
MEASURING AND ANALYZING FINE MOTOR SKILLS
 MEASURING AND ANALYZING FINE MOTOR SKILLS PART 1: MOTION TRACKING AND EMG OF FINE MOVEMENTS PART 2: HIGH-FIDELITY CAPTURE OF HAND AND FINGER BIOMECHANICS Abstract This white paper discusses an example
MEASURING AND ANALYZING FINE MOTOR SKILLS PART 1: MOTION TRACKING AND EMG OF FINE MOVEMENTS PART 2: HIGH-FIDELITY CAPTURE OF HAND AND FINGER BIOMECHANICS Abstract This white paper discusses an example
Non Verbal Communication of Emotions in Social Robots
 Non Verbal Communication of Emotions in Social Robots Aryel Beck Supervisor: Prof. Nadia Thalmann BeingThere Centre, Institute for Media Innovation, Nanyang Technological University, Singapore INTRODUCTION
Non Verbal Communication of Emotions in Social Robots Aryel Beck Supervisor: Prof. Nadia Thalmann BeingThere Centre, Institute for Media Innovation, Nanyang Technological University, Singapore INTRODUCTION
Electro-tactile Feedback System for a Prosthetic Hand
 University of Wollongong Research Online Faculty of Engineering and Information Sciences - Papers: Part A Faculty of Engineering and Information Sciences 2015 Electro-tactile Feedback System for a Prosthetic
University of Wollongong Research Online Faculty of Engineering and Information Sciences - Papers: Part A Faculty of Engineering and Information Sciences 2015 Electro-tactile Feedback System for a Prosthetic
Information and Program
 Robotics 1 Information and Program Prof. Alessandro De Luca Robotics 1 1 Robotics 1 2017/18! First semester (12 weeks)! Monday, October 2, 2017 Monday, December 18, 2017! Courses of study (with this course
Robotics 1 Information and Program Prof. Alessandro De Luca Robotics 1 1 Robotics 1 2017/18! First semester (12 weeks)! Monday, October 2, 2017 Monday, December 18, 2017! Courses of study (with this course
A PRELIMINARY STUDY TOWARDS AN EVA GLOVE EXOSKELETON
 A PRELIMINARY STUDY TOWARDS AN EVA GLOVE EXOSKELETON ESA/ESTEC, NOORDWIJK, THE NETHERLANDS / 12 14 APRIL 2011 Alain Favetto (1,2), Elisa Paola Ambrosio (1), Silvia Appendino (1), Fai Chen Chen (1,3), Diego
A PRELIMINARY STUDY TOWARDS AN EVA GLOVE EXOSKELETON ESA/ESTEC, NOORDWIJK, THE NETHERLANDS / 12 14 APRIL 2011 Alain Favetto (1,2), Elisa Paola Ambrosio (1), Silvia Appendino (1), Fai Chen Chen (1,3), Diego
Sensing the Texture of Surfaces by Anthropomorphic Soft Fingertips with Multi-Modal Sensors
 Sensing the Texture of Surfaces by Anthropomorphic Soft Fingertips with Multi-Modal Sensors Yasunori Tada, Koh Hosoda, Yusuke Yamasaki, and Minoru Asada Department of Adaptive Machine Systems, HANDAI Frontier
Sensing the Texture of Surfaces by Anthropomorphic Soft Fingertips with Multi-Modal Sensors Yasunori Tada, Koh Hosoda, Yusuke Yamasaki, and Minoru Asada Department of Adaptive Machine Systems, HANDAI Frontier
* Intelli Robotic Wheel Chair for Specialty Operations & Physically Challenged
 ADVANCED ROBOTICS SOLUTIONS * Intelli Mobile Robot for Multi Specialty Operations * Advanced Robotic Pick and Place Arm and Hand System * Automatic Color Sensing Robot using PC * AI Based Image Capturing
ADVANCED ROBOTICS SOLUTIONS * Intelli Mobile Robot for Multi Specialty Operations * Advanced Robotic Pick and Place Arm and Hand System * Automatic Color Sensing Robot using PC * AI Based Image Capturing
On the Variability of Tactile Signals During Grasping
 On the Variability of Tactile Signals During Grasping Qian Wan * and Robert D. Howe * * Harvard School of Engineering and Applied Sciences, Cambridge, USA Centre for Intelligent Systems Research, Deakin
On the Variability of Tactile Signals During Grasping Qian Wan * and Robert D. Howe * * Harvard School of Engineering and Applied Sciences, Cambridge, USA Centre for Intelligent Systems Research, Deakin
Electro-tactile Feedback System for a Prosthetic Hand
 Electro-tactile Feedback System for a Prosthetic Hand Daniel Pamungkas and Koren Ward University of Wollongong, Australia daniel@uowmail.edu.au koren@uow.edu.au Abstract. Without the sense of touch, amputees
Electro-tactile Feedback System for a Prosthetic Hand Daniel Pamungkas and Koren Ward University of Wollongong, Australia daniel@uowmail.edu.au koren@uow.edu.au Abstract. Without the sense of touch, amputees
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute Use an example to explain what is admittance control? You may refer to exoskeleton
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute Use an example to explain what is admittance control? You may refer to exoskeleton
Biomimetic Design of Actuators, Sensors and Robots
 Biomimetic Design of Actuators, Sensors and Robots Takashi Maeno, COE Member of autonomous-cooperative robotics group Department of Mechanical Engineering Keio University Abstract Biological life has greatly
Biomimetic Design of Actuators, Sensors and Robots Takashi Maeno, COE Member of autonomous-cooperative robotics group Department of Mechanical Engineering Keio University Abstract Biological life has greatly
Design, Realization and Sensorization of the Dexterous icub Hand
 Design, Realization and Sensorization of the Dexterous icub Hand Alexander Schmitz, Ugo Pattacini, Francesco Nori, Lorenzo Natale, Giorgio Metta and Giulio Sandini Abstract In this paper we describe the
Design, Realization and Sensorization of the Dexterous icub Hand Alexander Schmitz, Ugo Pattacini, Francesco Nori, Lorenzo Natale, Giorgio Metta and Giulio Sandini Abstract In this paper we describe the
NCCT IEEE PROJECTS ADVANCED ROBOTICS SOLUTIONS. Latest Projects, in various Domains. Promise for the Best Projects
 NCCT Promise for the Best Projects IEEE PROJECTS in various Domains Latest Projects, 2009-2010 ADVANCED ROBOTICS SOLUTIONS EMBEDDED SYSTEM PROJECTS Microcontrollers VLSI DSP Matlab Robotics ADVANCED ROBOTICS
NCCT Promise for the Best Projects IEEE PROJECTS in various Domains Latest Projects, 2009-2010 ADVANCED ROBOTICS SOLUTIONS EMBEDDED SYSTEM PROJECTS Microcontrollers VLSI DSP Matlab Robotics ADVANCED ROBOTICS
Touching and Walking: Issues in Haptic Interface
 Touching and Walking: Issues in Haptic Interface Hiroo Iwata 1 1 Institute of Engineering Mechanics and Systems, University of Tsukuba, 80, Tsukuba, 305-8573 Japan iwata@kz.tsukuba.ac.jp Abstract. This
Touching and Walking: Issues in Haptic Interface Hiroo Iwata 1 1 Institute of Engineering Mechanics and Systems, University of Tsukuba, 80, Tsukuba, 305-8573 Japan iwata@kz.tsukuba.ac.jp Abstract. This
The Production and Research for Humanoid Robot
 The Production and Research for Humanoid Robot Can-Yu Liu, Bo Hu, Hai Tian, and Yang Li Communication and Engineering, Harbin Engineering University 309936424@qq.com 274625394@qq.com 1144022237@qq.com
The Production and Research for Humanoid Robot Can-Yu Liu, Bo Hu, Hai Tian, and Yang Li Communication and Engineering, Harbin Engineering University 309936424@qq.com 274625394@qq.com 1144022237@qq.com
Department of Robotics Ritsumeikan University
 Department of Robotics Ritsumeikan University Shinichi Hirai Dept. Robotics Ritsumeikan Univ. Hanoi Institute of Technology Hanoi, Vietnam, Dec. 20, 2008 http://www.ritsumei.ac.jp/se/rm/robo/index-e.htm
Department of Robotics Ritsumeikan University Shinichi Hirai Dept. Robotics Ritsumeikan Univ. Hanoi Institute of Technology Hanoi, Vietnam, Dec. 20, 2008 http://www.ritsumei.ac.jp/se/rm/robo/index-e.htm
Nylon-Muscle-Actuated Robotic Finger
 Erik Jonsson School of Engineering and Computer Science Nylon-Muscle-Actuated Robotic Finger 2015 SPIE Citation: Wu, Lianjun, Monica Jung de Andrade, Richard S. Rome, Carter Haines, et al. 2015. "Nylon-Muscle-Actuated
Erik Jonsson School of Engineering and Computer Science Nylon-Muscle-Actuated Robotic Finger 2015 SPIE Citation: Wu, Lianjun, Monica Jung de Andrade, Richard S. Rome, Carter Haines, et al. 2015. "Nylon-Muscle-Actuated
Canadian Activities in Intelligent Robotic Systems - An Overview
 In Proceedings of the 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2004' ESTEC, Noordwijk, The Netherlands, November 2-4, 2004 Canadian Activities in Intelligent Robotic
In Proceedings of the 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2004' ESTEC, Noordwijk, The Netherlands, November 2-4, 2004 Canadian Activities in Intelligent Robotic
FLEX SENSOR BASED ROBOTIC ARM CONTROLLER: DEVELOPMENT
 FLEX SENSOR BASED ROBOTIC ARM CONTROLLER: DEVELOPMENT Jagtap Gautami 1, Alve Sampada 2, Malhotra Sahil 3, Pankaj Dadhich 4 Electronics and Telecommunication Department, Guru Gobind Singh Polytechnic, Nashik
FLEX SENSOR BASED ROBOTIC ARM CONTROLLER: DEVELOPMENT Jagtap Gautami 1, Alve Sampada 2, Malhotra Sahil 3, Pankaj Dadhich 4 Electronics and Telecommunication Department, Guru Gobind Singh Polytechnic, Nashik
The Humanoid Robot ARMAR: Design and Control
 The Humanoid Robot ARMAR: Design and Control Tamim Asfour, Karsten Berns, and Rüdiger Dillmann Forschungszentrum Informatik Karlsruhe, Haid-und-Neu-Str. 10-14 D-76131 Karlsruhe, Germany asfour,dillmann
The Humanoid Robot ARMAR: Design and Control Tamim Asfour, Karsten Berns, and Rüdiger Dillmann Forschungszentrum Informatik Karlsruhe, Haid-und-Neu-Str. 10-14 D-76131 Karlsruhe, Germany asfour,dillmann
Towards Interactive Learning for Manufacturing Assistants. Andreas Stopp Sven Horstmann Steen Kristensen Frieder Lohnert
 Towards Interactive Learning for Manufacturing Assistants Andreas Stopp Sven Horstmann Steen Kristensen Frieder Lohnert DaimlerChrysler Research and Technology Cognition and Robotics Group Alt-Moabit 96A,
Towards Interactive Learning for Manufacturing Assistants Andreas Stopp Sven Horstmann Steen Kristensen Frieder Lohnert DaimlerChrysler Research and Technology Cognition and Robotics Group Alt-Moabit 96A,
Robonaut: A Robotic Astronaut Assistant
 Proceeding of the 6 th International Symposium on Artificial Intelligence and Robotics & Automation in Space: i-sairas 2001, Canadian Space Agency, St-Hubert, Quebec, Canada, June 18-22, 2001. Robonaut:
Proceeding of the 6 th International Symposium on Artificial Intelligence and Robotics & Automation in Space: i-sairas 2001, Canadian Space Agency, St-Hubert, Quebec, Canada, June 18-22, 2001. Robonaut:
Dr. Han-Pang Huang Department of Mechanical Engineering National Taiwan University. Robotics Association Taiwan (ROBOAT)
") Dr. Han-Pang Huang Department of Mechanical Engineering National Taiwan University Robotics Association Taiwan (ROBOAT) IFR General Assembly Barcelona, 13th of March 2009 1 Outline The Development Guideline
Dr. Han-Pang Huang Department of Mechanical Engineering National Taiwan University Robotics Association Taiwan (ROBOAT) IFR General Assembly Barcelona, 13th of March 2009 1 Outline The Development Guideline
A Compact Twisted String Actuation System for Robotic Applications
 DEPARTMENT OF MECHANICAL ENGINEERING A Compact Twisted String Actuation System for Robotic Applications Dissertation presented to achieve the degree of Master in Mechanical Engineering in the specialization
DEPARTMENT OF MECHANICAL ENGINEERING A Compact Twisted String Actuation System for Robotic Applications Dissertation presented to achieve the degree of Master in Mechanical Engineering in the specialization
Midway Design Review
 Midway Design Review S.H.A.R.C. Simulated Hand and Arm Remote Control Team 6 Connor Pope, Daniel Sheridan, Derek Caudill, Harrison Shecter December 4th, 2015 Department of Electrical and Computer Engineering
Midway Design Review S.H.A.R.C. Simulated Hand and Arm Remote Control Team 6 Connor Pope, Daniel Sheridan, Derek Caudill, Harrison Shecter December 4th, 2015 Department of Electrical and Computer Engineering
Haptic Feedback in Robot Assisted Minimal Invasive Surgery
 K. Bhatia Haptic Feedback in Robot Assisted Minimal Invasive Surgery 1 / 33 MIN Faculty Department of Informatics Haptic Feedback in Robot Assisted Minimal Invasive Surgery Kavish Bhatia University of
K. Bhatia Haptic Feedback in Robot Assisted Minimal Invasive Surgery 1 / 33 MIN Faculty Department of Informatics Haptic Feedback in Robot Assisted Minimal Invasive Surgery Kavish Bhatia University of
WiCon Robo Hand. Electrical & Computer Engineering Department, Texas A&M University at Qatar
 WiCon Robo Hand Team Members: Mouhyemen Khan Arian Yusuf Ahmed Ragheeb Nouran Mohamed Team Name: N-ARM Electrical & Computer Engineering Department, Texas A&M University at Qatar Submitted to Dr. Haitham
WiCon Robo Hand Team Members: Mouhyemen Khan Arian Yusuf Ahmed Ragheeb Nouran Mohamed Team Name: N-ARM Electrical & Computer Engineering Department, Texas A&M University at Qatar Submitted to Dr. Haitham
can easily be integrated with electronics for signal processing, etc. by fabricating
 Glossary Active touch The process where objects are dynamically explored by a finger or hand as in object contour following. Adaptive thresholding A procedure in which a stimulus is interactively increased
Glossary Active touch The process where objects are dynamically explored by a finger or hand as in object contour following. Adaptive thresholding A procedure in which a stimulus is interactively increased
Grasp Mapping Between a 3-Finger Haptic Device and a Robotic Hand
 Grasp Mapping Between a 3-Finger Haptic Device and a Robotic Hand Francisco Suárez-Ruiz 1, Ignacio Galiana 1, Yaroslav Tenzer 2,3, Leif P. Jentoft 2,3, Robert D. Howe 2, and Manuel Ferre 1 1 Centre for
Grasp Mapping Between a 3-Finger Haptic Device and a Robotic Hand Francisco Suárez-Ruiz 1, Ignacio Galiana 1, Yaroslav Tenzer 2,3, Leif P. Jentoft 2,3, Robert D. Howe 2, and Manuel Ferre 1 1 Centre for
Tele-operated robotic arm and hand with intuitive control and haptic feedback
 American Journal of Aerospace Engineering 2014; 1(4): 21-27 Published online December 18, 2014 (http://www.sciencepublishinggroup.com/j/ajae) doi: 10.11648/j.ajae.20140104.11 Tele-operated robotic arm
American Journal of Aerospace Engineering 2014; 1(4): 21-27 Published online December 18, 2014 (http://www.sciencepublishinggroup.com/j/ajae) doi: 10.11648/j.ajae.20140104.11 Tele-operated robotic arm
11 1. H Tomori, Y Midorikawa and T Nakamura, Vibration control of an artificial muscle manipulator with a magnetorheological fluid brake, Journal of
 11 1. H Tomori, Y Midorikawa and T Nakamura, Vibration control of an artificial muscle manipulator with a magnetorheological fluid brake, Journal of Physics: Conference Series, Volume 412 (2013), 012053
11 1. H Tomori, Y Midorikawa and T Nakamura, Vibration control of an artificial muscle manipulator with a magnetorheological fluid brake, Journal of Physics: Conference Series, Volume 412 (2013), 012053
A Mechatronic Perspective on Robotic Arms and End-Effectors
 1 A Mechatronic Perspective on Robotic Arms and End-Effectors Pinhas Ben-Tzvi and Paul Moubarak Robotics and Mechatronics Laboratory Department of Mechanical and Aerospace Engineering The George Washington
1 A Mechatronic Perspective on Robotic Arms and End-Effectors Pinhas Ben-Tzvi and Paul Moubarak Robotics and Mechatronics Laboratory Department of Mechanical and Aerospace Engineering The George Washington
IOSR Journal of Engineering (IOSRJEN) e-issn: , p-issn: , Volume 2, Issue 11 (November 2012), PP 37-43
 e-issn: , p-issn: , Volume 2, Issue 11 (November 2012), PP 37-43") IOSR Journal of Engineering (IOSRJEN) e-issn: 2250-3021, p-issn: 2278-8719, Volume 2, Issue 11 (November 2012), PP 37-43 Operative Precept of robotic arm expending Haptic Virtual System Arnab Das 1, Swagat
IOSR Journal of Engineering (IOSRJEN) e-issn: 2250-3021, p-issn: 2278-8719, Volume 2, Issue 11 (November 2012), PP 37-43 Operative Precept of robotic arm expending Haptic Virtual System Arnab Das 1, Swagat
A New Low-Cost Bionic Hand
 Paper ID #15623 A New Low-Cost Bionic Hand Mr. TJ Brown, Middle Tennessee State University TJ Brown earned his Bachelor of Science in 2015 at Middle Tennessee State University where he studied Electro-Mechanical
Paper ID #15623 A New Low-Cost Bionic Hand Mr. TJ Brown, Middle Tennessee State University TJ Brown earned his Bachelor of Science in 2015 at Middle Tennessee State University where he studied Electro-Mechanical
Figure 2: Examples of (Left) one pull trial with a 3.5 tube size and (Right) different pull angles with 4.5 tube size. Figure 1: Experimental Setup.
 one pull trial with a 3.5 tube size and (Right) different pull angles with 4.5 tube size. Figure 1: Experimental Setup.") Haptic Classification and Faulty Sensor Compensation for a Robotic Hand Hannah Stuart, Paul Karplus, Habiya Beg Department of Mechanical Engineering, Stanford University Abstract Currently, robots operating
Haptic Classification and Faulty Sensor Compensation for a Robotic Hand Hannah Stuart, Paul Karplus, Habiya Beg Department of Mechanical Engineering, Stanford University Abstract Currently, robots operating
Live. With Michelangelo
 Live. With Michelangelo As natural as you are Live. With Michelangelo As natural as you are 1 2 Live. With Michelangelo As natural as you are Few parts of the human body are as versatile and complex as
Live. With Michelangelo As natural as you are Live. With Michelangelo As natural as you are 1 2 Live. With Michelangelo As natural as you are Few parts of the human body are as versatile and complex as
Chapter 1 Introduction to Robotics
 Chapter 1 Introduction to Robotics PS: Most of the pages of this presentation were obtained and adapted from various sources in the internet. 1 I. Definition of Robotics Definition (Robot Institute of
Chapter 1 Introduction to Robotics PS: Most of the pages of this presentation were obtained and adapted from various sources in the internet. 1 I. Definition of Robotics Definition (Robot Institute of
Live. With Michelangelo
 Live. With Michelangelo As natural as you are Live. With Michelangelo As natural as you are 1 2 Live. With Michelangelo As natural as you are Few parts of the human body are as versatile and complex as
Live. With Michelangelo As natural as you are Live. With Michelangelo As natural as you are 1 2 Live. With Michelangelo As natural as you are Few parts of the human body are as versatile and complex as
Towards Grasp Learning in Virtual Humans by Imitation of Virtual Reality Users
 Towards Grasp Learning in Virtual Humans by Imitation of Virtual Reality Users Matthias Weber, Guido Heumer, Bernhard Jung ISNM International School of New Media University of Lübeck Willy-Brandt-Allee
Towards Grasp Learning in Virtual Humans by Imitation of Virtual Reality Users Matthias Weber, Guido Heumer, Bernhard Jung ISNM International School of New Media University of Lübeck Willy-Brandt-Allee
DETC AN ADMITTANCE GLOVE MECHANISM FOR CONTROLLING A MOBILE ROBOT
 Proceedings of the ASME 212 International Design Engineering Technical Conferences & Computers and Information in Engineering Conference IDETC/CIE 212 August 12-15, 212, Chicago, IL, USA DETC212-71284
Proceedings of the ASME 212 International Design Engineering Technical Conferences & Computers and Information in Engineering Conference IDETC/CIE 212 August 12-15, 212, Chicago, IL, USA DETC212-71284
Design of a cybernetic hand for perception and action
 Biol Cybern (2006) 95:629 644 DOI 10.1007/s00422-006-0124-2 ORIGINAL PAPER Design of a cybernetic hand for perception and action M. C. Carrozza G. Cappiello S. Micera B. B. Edin L. Beccai C. Cipriani Received:
Biol Cybern (2006) 95:629 644 DOI 10.1007/s00422-006-0124-2 ORIGINAL PAPER Design of a cybernetic hand for perception and action M. C. Carrozza G. Cappiello S. Micera B. B. Edin L. Beccai C. Cipriani Received:
CS277 - Experimental Haptics Lecture 2. Haptic Rendering
 CS277 - Experimental Haptics Lecture 2 Haptic Rendering Outline Announcements Human haptic perception Anatomy of a visual-haptic simulation Virtual wall and potential field rendering A note on timing...
CS277 - Experimental Haptics Lecture 2 Haptic Rendering Outline Announcements Human haptic perception Anatomy of a visual-haptic simulation Virtual wall and potential field rendering A note on timing...
Development of a 3D-Printed Bionic Hand with Muscle- and Force Control
 Philipp Zech, Justus Piater (Eds.) Proceedings of the Austrian Robotics Workshop 2018 2018 innsbruck university press, ISBN 978-3-903187-22-1, DOI 10.15203/3187-22-1 Development of a 3D-Printed Bionic
Philipp Zech, Justus Piater (Eds.) Proceedings of the Austrian Robotics Workshop 2018 2018 innsbruck university press, ISBN 978-3-903187-22-1, DOI 10.15203/3187-22-1 Development of a 3D-Printed Bionic
PICK AND PLACE HUMANOID ROBOT USING RASPBERRY PI AND ARDUINO FOR INDUSTRIAL APPLICATIONS
 PICK AND PLACE HUMANOID ROBOT USING RASPBERRY PI AND ARDUINO FOR INDUSTRIAL APPLICATIONS Bernard Franklin 1, Sachin.P 2, Jagadish.S 3, Shaista Noor 4, Rajashekhar C. Biradar 5 1,2,3,4,5 School of Electronics
PICK AND PLACE HUMANOID ROBOT USING RASPBERRY PI AND ARDUINO FOR INDUSTRIAL APPLICATIONS Bernard Franklin 1, Sachin.P 2, Jagadish.S 3, Shaista Noor 4, Rajashekhar C. Biradar 5 1,2,3,4,5 School of Electronics
Dr. Ashish Dutta. Professor, Dept. of Mechanical Engineering Indian Institute of Technology Kanpur, INDIA
 Introduction: History of Robotics - past, present and future Dr. Ashish Dutta Professor, Dept. of Mechanical Engineering Indian Institute of Technology Kanpur, INDIA Origin of Automation: replacing human
Introduction: History of Robotics - past, present and future Dr. Ashish Dutta Professor, Dept. of Mechanical Engineering Indian Institute of Technology Kanpur, INDIA Origin of Automation: replacing human
PHYSICAL ROBOTS PROGRAMMING BY IMITATION USING VIRTUAL ROBOT PROTOTYPES
 Bulletin of the Transilvania University of Braşov Series I: Engineering Sciences Vol. 6 (55) No. 2-2013 PHYSICAL ROBOTS PROGRAMMING BY IMITATION USING VIRTUAL ROBOT PROTOTYPES A. FRATU 1 M. FRATU 2 Abstract:
Bulletin of the Transilvania University of Braşov Series I: Engineering Sciences Vol. 6 (55) No. 2-2013 PHYSICAL ROBOTS PROGRAMMING BY IMITATION USING VIRTUAL ROBOT PROTOTYPES A. FRATU 1 M. FRATU 2 Abstract:
Tele-Operated Anthropomorphic Arm and Hand Design
 Tele-Operated Anthropomorphic Arm and Hand Design Namal A. Senanayake, Khoo B. How, and Quah W. Wai Abstract In this project, a tele-operated anthropomorphic robotic arm and hand is designed and built
Tele-Operated Anthropomorphic Arm and Hand Design Namal A. Senanayake, Khoo B. How, and Quah W. Wai Abstract In this project, a tele-operated anthropomorphic robotic arm and hand is designed and built
Object Exploration Using a Three-Axis Tactile Sensing Information
 Journal of Computer Science 7 (4): 499-504, 2011 ISSN 1549-3636 2011 Science Publications Object Exploration Using a Three-Axis Tactile Sensing Information 1,2 S.C. Abdullah, 1 Jiro Wada, 1 Masahiro Ohka
Journal of Computer Science 7 (4): 499-504, 2011 ISSN 1549-3636 2011 Science Publications Object Exploration Using a Three-Axis Tactile Sensing Information 1,2 S.C. Abdullah, 1 Jiro Wada, 1 Masahiro Ohka
Haptic Perception with a Robotic Hand
 Haptic Perception with a Robotic Hand Magnus Johnsson Dept. of Computer Science and Lund University Cognitive Science Lund University, Sweden Magnus.Johnsson@lucs.lu.se Christian Balkenius Lund University
Haptic Perception with a Robotic Hand Magnus Johnsson Dept. of Computer Science and Lund University Cognitive Science Lund University, Sweden Magnus.Johnsson@lucs.lu.se Christian Balkenius Lund University
Bringing a sense of touch to robotic hands. Matthias Zenker
 Bringing a sense of touch to robotic hands Matthias Zenker Bielefeld University / CITEC Germany 1 Fachworkshop Mechatronic Integrated Devices (MID) Nuremberg, February 13, 2014 Cognitive Interaction Technology
Bringing a sense of touch to robotic hands Matthias Zenker Bielefeld University / CITEC Germany 1 Fachworkshop Mechatronic Integrated Devices (MID) Nuremberg, February 13, 2014 Cognitive Interaction Technology
Henry Lin, Department of Electrical and Computer Engineering, California State University, Bakersfield Lecture 8 (Robotics) July 25 th, 2012
 July 25 th, 2012") Henry Lin, Department of Electrical and Computer Engineering, California State University, Bakersfield Lecture 8 (Robotics) July 25 th, 2012 1 2 Robotic Applications in Smart Homes Control of the physical
Henry Lin, Department of Electrical and Computer Engineering, California State University, Bakersfield Lecture 8 (Robotics) July 25 th, 2012 1 2 Robotic Applications in Smart Homes Control of the physical
Wearable Haptic Display to Present Gravity Sensation
 Wearable Haptic Display to Present Gravity Sensation Preliminary Observations and Device Design Kouta Minamizawa*, Hiroyuki Kajimoto, Naoki Kawakami*, Susumu, Tachi* (*) The University of Tokyo, Japan
Wearable Haptic Display to Present Gravity Sensation Preliminary Observations and Device Design Kouta Minamizawa*, Hiroyuki Kajimoto, Naoki Kawakami*, Susumu, Tachi* (*) The University of Tokyo, Japan
PC-ROBOARM WITH EFFICIENT SPEED CONTROL AND PLANNING BASED ON WIRELESS TECHNOLOGY
 PC-ROBOARM WITH EFFICIENT SPEED CONTROL AND PLANNING BASED ON WIRELESS TECHNOLOGY Ms. M. Vennila 1, Ms. J. Anitha Thulasi 2 Associate Prof. &HOD / EEE Department 1, Assistant Professor /EEE Department
PC-ROBOARM WITH EFFICIENT SPEED CONTROL AND PLANNING BASED ON WIRELESS TECHNOLOGY Ms. M. Vennila 1, Ms. J. Anitha Thulasi 2 Associate Prof. &HOD / EEE Department 1, Assistant Professor /EEE Department
Experiments with Haptic Perception in a Robotic Hand
 Experiments with Haptic Perception in a Robotic Hand Magnus Johnsson 1,2 Robert Pallbo 1 Christian Balkenius 2 1 Dept. of Computer Science and 2 Lund University Cognitive Science Lund University, Sweden
Experiments with Haptic Perception in a Robotic Hand Magnus Johnsson 1,2 Robert Pallbo 1 Christian Balkenius 2 1 Dept. of Computer Science and 2 Lund University Cognitive Science Lund University, Sweden
FlexTorque: Exoskeleton Interface for Haptic Interaction with the Digital World
 FlexTorque: Exoskeleton Interface for Haptic Interaction with the Digital World Dzmitry Tsetserukou 1, Katsunari Sato 2, and Susumu Tachi 3 1 Toyohashi University of Technology, 1-1 Hibarigaoka, Tempaku-cho,
FlexTorque: Exoskeleton Interface for Haptic Interaction with the Digital World Dzmitry Tsetserukou 1, Katsunari Sato 2, and Susumu Tachi 3 1 Toyohashi University of Technology, 1-1 Hibarigaoka, Tempaku-cho,
Prof. Ciro Natale. Francesco Castaldo Andrea Cirillo Pasquale Cirillo Umberto Ferrara Luigi Palmieri
 Real Time Control of an Anthropomorphic Robotic Arm using FPGA Advisor: Prof. Ciro Natale Students: Francesco Castaldo Andrea Cirillo Pasquale Cirillo Umberto Ferrara Luigi Palmieri Objective Introduction
Real Time Control of an Anthropomorphic Robotic Arm using FPGA Advisor: Prof. Ciro Natale Students: Francesco Castaldo Andrea Cirillo Pasquale Cirillo Umberto Ferrara Luigi Palmieri Objective Introduction
Quantifying Anthropomorphism of Robot Hands
 Quantifying Anthropomorphism of Robot Hands Minas V. Liarokapis, Panagiotis K. Artemiadis and Kostas J. Kyriakopoulos Abstract In this paper a comparative analysis between the human and three robotic hands
Quantifying Anthropomorphism of Robot Hands Minas V. Liarokapis, Panagiotis K. Artemiadis and Kostas J. Kyriakopoulos Abstract In this paper a comparative analysis between the human and three robotic hands
Wednesday, October 29, :00-04:00pm EB: 3546D. TELEOPERATION OF MOBILE MANIPULATORS By Yunyi Jia Advisor: Prof.
 Wednesday, October 29, 2014 02:00-04:00pm EB: 3546D TELEOPERATION OF MOBILE MANIPULATORS By Yunyi Jia Advisor: Prof. Ning Xi ABSTRACT Mobile manipulators provide larger working spaces and more flexibility
Wednesday, October 29, 2014 02:00-04:00pm EB: 3546D TELEOPERATION OF MOBILE MANIPULATORS By Yunyi Jia Advisor: Prof. Ning Xi ABSTRACT Mobile manipulators provide larger working spaces and more flexibility
Fabrication/Assembly Instructions
 Fabrication/Assembly Instructions Model T Ver 0.4 Overview McMaster Parts List Ø1/8, L3/8 dowel pin (P1) #97395A35 (8x) Ø1/8, L5/8 dowel pin (P2) #97395A445 (12x) Nylon Pulley (J1) #3434T31 (12x) Ø1/8,
Fabrication/Assembly Instructions Model T Ver 0.4 Overview McMaster Parts List Ø1/8, L3/8 dowel pin (P1) #97395A35 (8x) Ø1/8, L5/8 dowel pin (P2) #97395A445 (12x) Nylon Pulley (J1) #3434T31 (12x) Ø1/8,