Grasp Mapping Between a 3-Finger Haptic Device and a Robotic Hand
|
|
|
- Barbara Lawson
- 6 years ago
- Views:
Transcription
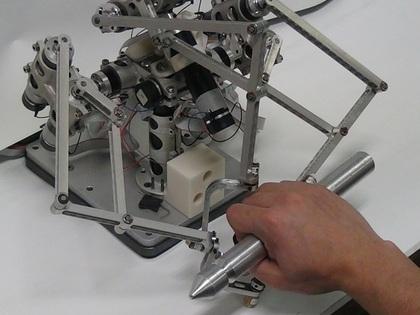
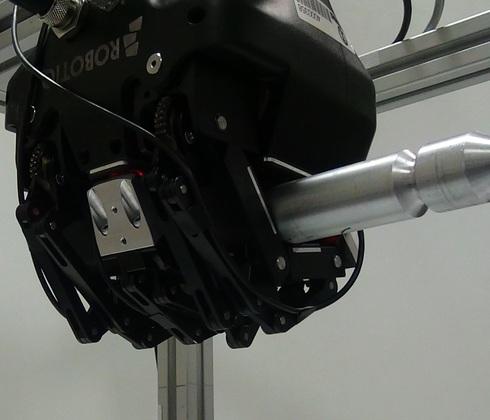
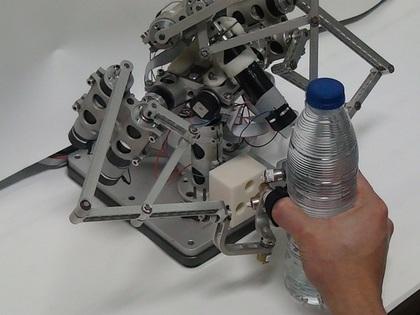
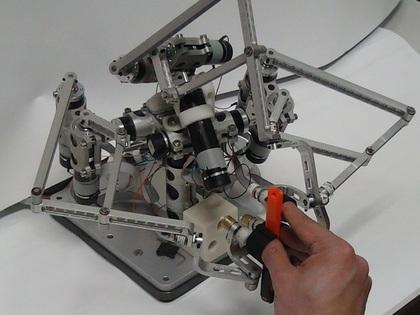
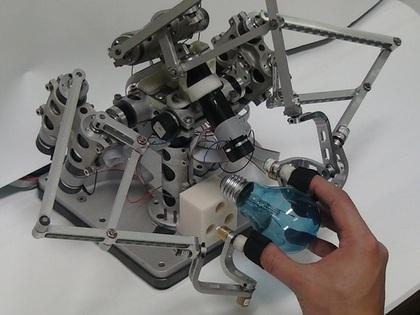
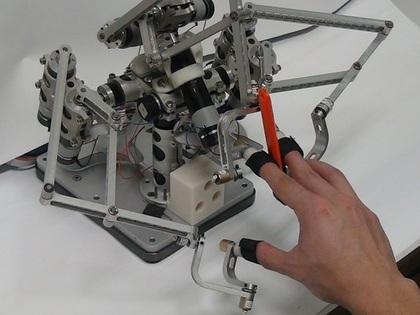
1 Grasp Mapping Between a 3-Finger Haptic Device and a Robotic Hand Francisco Suárez-Ruiz 1, Ignacio Galiana 1, Yaroslav Tenzer 2,3, Leif P. Jentoft 2,3, Robert D. Howe 2, and Manuel Ferre 1 1 Centre for Automation and Robotics UPM-CSIC, Madrid, Spain. 2 Harvard School of Engineering and Applied Sciences, Cambridge, MA, USA 3 TakkTile LLC, Cambridge, MA, USA Abstract. This paper presents the implementation of a robust grasp mapping between a 3-finger haptic device (master) and a robotic hand (slave). Mapping is based on a grasp equivalence defined considering the manipulation capabilities of the master and slave devices. The metrics that translate the human hand gesture to the robotic hand workspace are obtained through an analytical user study. This allows a natural control of the robotic hand. The grasp mapping is accomplished defining 4 control modes that encapsulate all the grasps gestures considered. Transition between modes guarantee collision-free movements and no damage to grasped objects. Detection of contact with objects is done by means of customized tactile sensors based on MEMS barometers. The methodology herein presented can be extended for controlling a wide range of different robotic hands with the 3-finger haptic device. Keywords: Grasp mapping, haptic device, robotic hand, tactile sensors 1 Introduction The definition of a grasp taxonomy for a multi-finger haptic device that allows controlling robotic hands presents a great challenge due to the wide range of available configurations (3-finger, 4-finger, 5-finger). The aim of this work is to obtain an intuitive grasp mapping for a 3-finger haptic device [1] that allows us to control a wide range of robotic hands. Haptic devices have been extensively used in teleoperation due to an increase in the immersion [2] and to a faster reaction time to unexpected force events [3, 4]. Most prior approaches [5, 6] focused on essentially anthropomorphic hands, where mapping at the finger level is most appropriate. Here, the focus is on mapping between functional grasps of specific object classes. This can be applied to map between completely different numbers and postures of fingers, so highly dissimilar master and slave hands can be used. The proposed mapping is based on Cutkosky and Howe [7] and Feix et al. [8] taxonomies. This paper argues that it is possible to cover several grasps in the human hand workspace with only 3 fingers and specifically knowing only the position of the thumb, middle and index fingers. Previous works [9] have shown


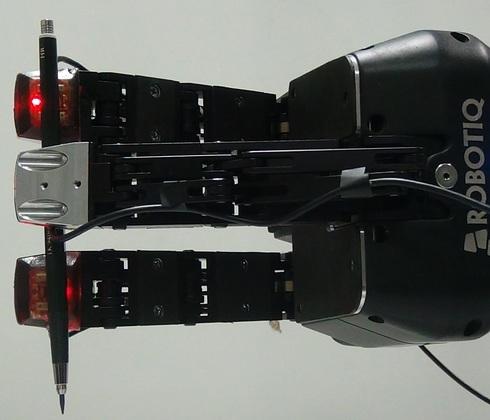
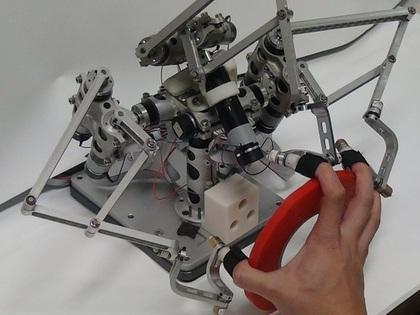
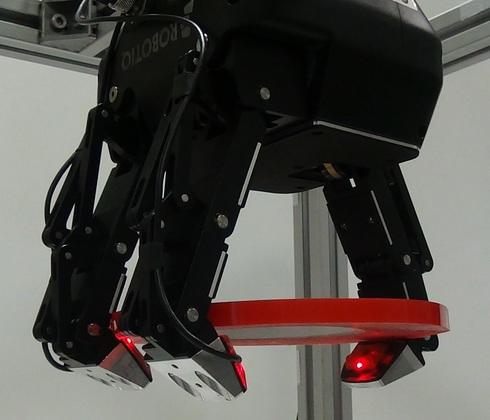
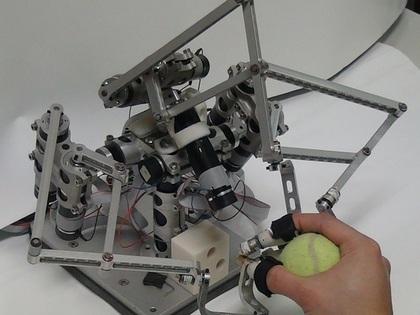
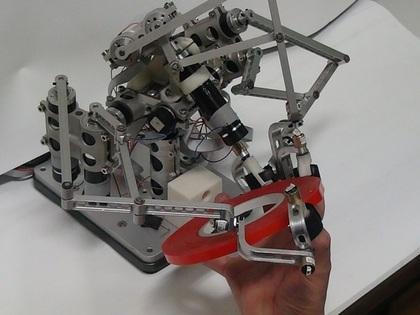
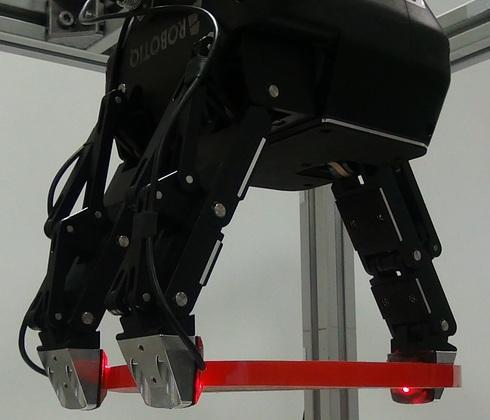
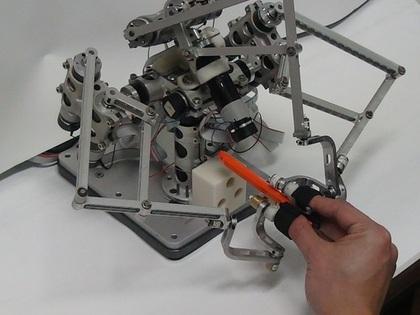
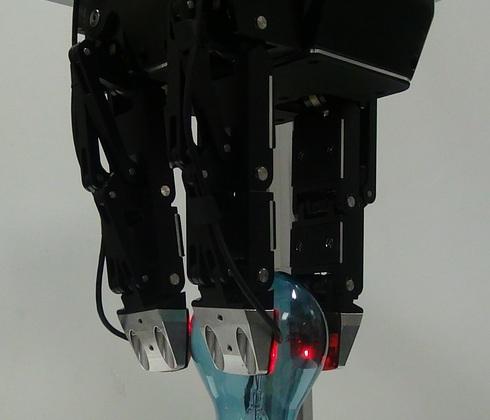
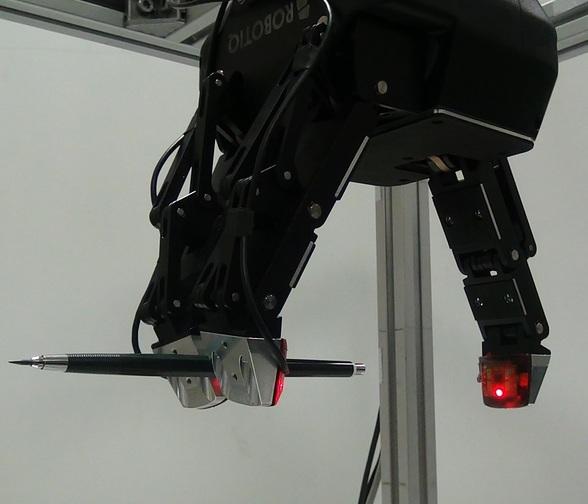
2 2 F. Suárez-Ruiz et al. that the model of the human hand can be simplified from 24 to 9 DoFs with a 10% error. Performing mechanical optimization of the number of tasks that a robotic hand can accomplish while reducing the number of DoF and hence its cost and complexity, often leads to non-anthropomorphic designs. However, the hand gesture in the human hand space should be mapped to another gesture at the robotic hand grasp space. This requires an initial study of the hand morphology through simulation or real experiments that calculates what is the most appropriate gesture to grasp a specific type of object. This paper is organized as follows. Section 2 describes the experimental setup used for evaluation. Section 3 explains the proposed grasp mapping between the 3-finger haptic device space and the robotic hand space. Section 4 presents the results obtained from the experiments carried out. Finally, conclusions are summarized in section 5. 2 Experimental Setup (a) 3-Finger Haptic Device (b) Robotiq Hand Fig. 1: Experimental setup: The robotic hand is located facing down. The experimental setup (Fig. 1) consists of a 3-finger haptic device acting as master that controls a robotic 3-finger hand acting as slave. The robotic hand (Fig. 1b) is located facing down in order to asses stable grasps [10] Finger Haptic Device The 3-finger haptic device shown in Fig. 1a has 10 actuators and 19 DoFs for movements. Each finger has its own mechanical structure with 6 DoFs. The first 3 are actuated and allow reflecting forces to the user in any direction. The last 3 allow to reach and measure any orientation within the device workspace. The mechanical structures of the 3 fingers are linked to the base through a redundant actuated joint that increases the workspace which results in a shape similar to a torus [1]. Finger tip positions are calculated from the actuators encoders. Orientations can be obtained from encoders located at the gimbal rotations.

![3 Takktile Sensors The tactile sensing system is based on MEMS Barometers encapsulated in rubber, and vacuum-degassed to provide a direct transmission between surface and sensor [11] (TakkTile LLC,](/docs-images/72/67414669/images/3-1.jpg "Cambridge, MA). This approach provides sensitive and robust feedback while the outline of the sensors could be easily customized.")
 MEMS barometers 6 mm (b) Cast sensor (c) Fingertip mounting Fig. 2: TakkTile sensors for Robotiq Adaptive Gripper.")
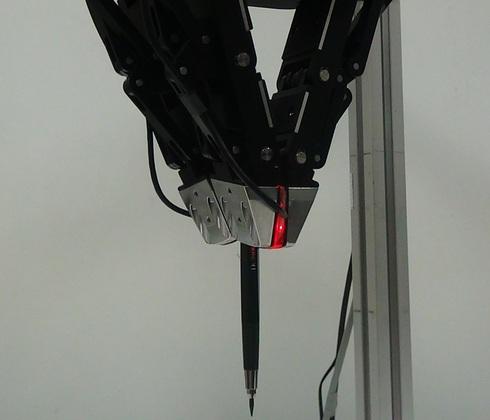
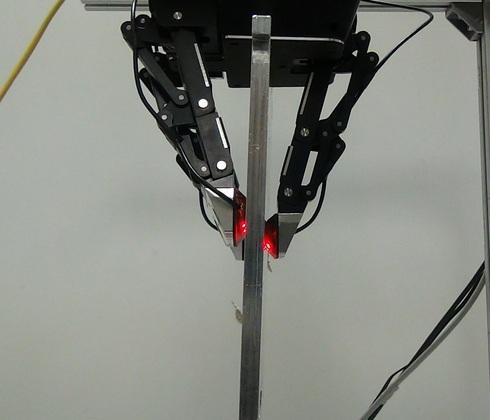
3 Grasp Mapping Between a 3-Finger Haptic Device and a Robotic Hand Robotic Hand The robotic hand shown in Fig. 1b is the 3-finger adaptive robot gripper by Robotiq 4. It has 4 actuators and 10 DoFs with under-actuated design that allows the fingers to automatically adapt to the grasped object shape and also simplifies the control. 2.3 Takktile Sensors The tactile sensing system is based on MEMS Barometers encapsulated in rubber, and vacuum-degassed to provide a direct transmission between surface and sensor [11] (TakkTile LLC, Cambridge, MA). This approach provides sensitive and robust feedback while the outline of the sensors could be easily customized. The sensors are developed for the fingertips of the gripper as these are the points of initial contact during manipulation. 11 mm 8 mm (a) MEMS barometers 6 mm (b) Cast sensor (c) Fingertip mounting Fig. 2: TakkTile sensors for Robotiq Adaptive Gripper. Four MPL115A2 MEMS barometers (Freescale, Austin, TX) along with an ATtiny24 microcontroller (Atmel, San Jose, CA) are mounted on a custom PCB. The barometers spacing provides effective sensing over the pad of the fingertip under 6mm rubber (see Fig. 2). The microcontroller is embedded to provide chip-select function during sampling. The sensors are cast in urethane rubber (Vytaflex 20, Smoothon Inc.) in custom designed molds. The pressure readings are zeroed immediately before each grasp to eliminate thermal drift. 3 Grasp Mapping The hand gesture in the human hand space captured by the 3-finger haptic device should be mapped to another gesture in the robotic hand grasp space. Table 1 shows the proposed grasp mapping between the master and slave devices. In total we suggest 12 possible grasps based on the taxonomies proposed by Cutkosky and Howe [7] and Feix et al. [8]. 4





4 4 F. Sua rez-ruiz et al. Table 1: Equivalent grasps between the haptic device and the robotic hand Name 3-Finger Device Robotiq Hand Type Gesture 1 Large Diameter 2 Small Diameter 3 Medium Wrap 4 Prismatic 2-Finger 5 Disk 6 Sphere 7 Disk 8 Palmar 9 Sphere 10 Parallel Extension 11 Adduction Grip Scissor



5 Grasp Mapping Between a 3-Finger Haptic Device and a Robotic Hand 5 Table 1: (Continued) 12 Ring Ring Theses grasps are chosen considering the capabilities of the robotic hand. The hand can perform them in a stable manner [10] with only 3 fingers thanks to its under-actuated design. 3.1 Grasp Identification: User Study In order to identify the intended grasp an analytical user study is performed. Moreover, the grasp has to be detected in the early stages of the approaching movement so that the control of the robotic hand can configure the gesture mode before starting to move. Five users wearing the 3-finger haptic device without any experience with the device and no prior knowledge about grasping taxonomies repeat 50 times 4 different grasping gestures that encapsulate all the proposed grasps in Table 1:,, Scissor and Ring. Each user opens the hand, then closes to grasp the object and finally opens again to continue with the next grasp. p t d 2 p i d 0 p c d 3 d 1 p m Fig. 3: Metrics used for the grasp identification. Metrics Since the user can grasp at any point of the haptic device workspace, relative distances between the fingers are used, see Fig. 3 and Equation (1). Furthermore, every person has different hand size, hence it s convenient to normalize these distances between 0 and 1, see Equation (2). p c = (p m p i ). 2 d 0 = p c p t d 1 = p m p i d 2 = p i p t d 3 = p m p t. (1) ˆx = x min x max x min x. (2)
6 6 F. Suárez-Ruiz et al. Grasp Detection We detect the grasp using a simplified approach that considers the distances d 1, d 2 and d 3. Moreover, from the area Equation (3) of the triangle formed between the fingers it is possible to determine when the grasp starts and ends. A = s (s d 1 ) (s d 2 ) (s d 3 ) with s = d 1 + d 2 + d 3 2 Figure 4 shows 5 grasps for all the studied gestures. For each grasp the start and end point is shown. The grasps are segmented detecting the zero crossing point of the area derivative da dt. This derivative is calculated using a digital low-pass differentiator [12] with a constant window of 100 ms. (3) Area [normalized] Time [s] Time [s] Ring Time [s] Scissor Time [s] Start End Grasp Fig. 4: The grasp detection is done using the area of the triangle formed between the 3 fingers. The grasp starts when the area derivative crosses zero going negative and ends when crosses zero going positive. da dt [normalized] Ring Scissor Fig. 5: Area derivative values at the grasp start for all the gestures. Figure 5 shows a box plot of the area derivative when the grasp starts. It can be seen that for all the gestures it is possible to choose a threshold (0.4 in our application) for detecting in real-time when the grasp starts. 3.2 Robotic Hand Control The 3-finger robotic hand behaves in an anthropomorphic way but cannot perform some of the transitions while avoiding collisions between the fingers. For
7 Grasp Mapping Between a 3-Finger Haptic Device and a Robotic Hand 7 example, in a change from 3 Medium Wrap to 5 Palmar the middle and index fingers will collide. The human hand lacks of this problem because the fingers can be overlapped. Figure 6 shows the proposed control modes: (1-7) (3 Fingers) (1 + 2 fingers) (8-10) Halt 3-finger mode 2-finger mode (11) Scissor (Index + Middle) Ring (Thumb + Middle) (12) Fig. 6: Grasp modes. Numbers correspond to the grasps in Table 1. Halt Starts when the user opens the hand, then monitors the area derivative until it exceeds the detection threshold and depending on the finger velocities ṗ t, ṗ m and ṗ i selects the control mode that corresponds to the user intention. Mode Covers 7 of the 12 possible grasps. In this 3-finger mode the opening/closing is mapped to the distance d 0. The distance between the middle and index fingers is fixed to avoid finger collisions. The differentiation between power and precision grasp is accomplish using the position where the tactile sensors detect the contact. Mode 3-finger mode useful to perform precision grasps of small objects. Similar to the Mode the opening/closing is mapped to the distance d 0. The middle and index fingers move together to act as one big finger. Scissor Mode The middle and index fingers act as a scissor in this 2-finger mode. The opening/closing is mapped to the distance d 1. This mode lacks of tactile feedback due to the location of the tactile sensors. Ring Mode The user can perform equivalent grasps to those achievable using a classic 2-finger gripper. It uses the thumb and middle fingers and therefore the opening/closing is mapped to the distance d 3. 4 Results and Discussion In order to validate the robustness of the grasp identification algorithm an experiment of 360 different samples has been carried out. Six users without any training and no experience with the haptic device perform 60 random grasps, 15 for each control mode.
8 8 F. Suárez-Ruiz et al. Table 2: Results of the grasp identification, 94.7% of the samples are correctly classified. Grasps Predicted group membership [%] [%] Ring [%] Scissor [%] Ring Scissor The proposed method classifies correctly 94.7% of the samples with a confidence level of 99%. Table 2 shows the percentage of efficiency for each grasp identification. The relationship among the predicted group membership and the intended grasp shows an important error between and Ring grasps. This error is due to the index and middle fingers coupling that results in similar movements with the only difference been that is a 3-finger mode and Ring is a 2-finger mode. Depending on the application, the use of the Ring gesture can be avoided to increase the classification efficiency up to 97.8%. Other alternative can include force readings from the 3-finger haptic device to improve the discrimination given that the force exerted by the index finger during the Ring grasp is almost zero. 5 Conclusions This paper presents an efficient connexion between a 3-finger haptic device and a robotic hand. This connection is based on a robust grasp mapping that can be extended to dissimilar master and slave hands. The results reveal that exists sufficient separation between the two larger groups and which allows to discriminate them clearly. The grasp identification is based on the results of an analytical user study. The algorithm identifies the grasp in the early stage of the approaching movement using a time window of 100 ms. This fast reaction time allows the robotic hand to change the grasp mode before starting to move. The proposed method classifies correctly 94.7% of the samples and depending on the application this percentage of efficiency can be increased up to 97.8%. All users that performed the experiments had no experience with the haptic device and no prior knowledge about grasping taxonomies, which suggest that a natural control of the robotic hand is accomplished. Finally, the combination of the grasp identification and control modes allows collision-free movements and coherent force feedback to the user while interacting with grasped objects.
9 Grasp Mapping Between a 3-Finger Haptic Device and a Robotic Hand 9 Acknowledgements This work has been partially funded by the Ministerio de Economía y Competitividad under grant DPI (TeleScale project), the program Personal Investigador en Formación from Universidad Politcnica de Madrid (UPM) and the i-link project supported by CSIC for the collaboration of Harvard School of Engineering and Applied Sciences and Centre for Automation and Robotics UPM-CSIC. References 1. López, J., Breñosa, J., Galiana, I., Ferre, M., Giménez, A., Barrio, J.: Mechanical Design Optimization for Multi-Finger Haptic Devices Applied to Virtual Grasping Manipulation. Strojniški vestnik Journal of Mechanical Engineering 58(7-8) (July 2012) Hecht, D., Reiner, M., Karni, A.: Enhancement of response times to bi- and tri-modal sensory stimuli during active movements. Experimental brain research 185(4) (March 2008) Diederich, A., Colonius, H.: Bimodal and trimodal multisensory enhancement: Effects of stimulus onset and intensity on reaction time. Perception & Psychophysics 66(8) (November 2004) Hecht, D., Reiner, M., Halevy, G.: Multimodal Virtual Environments: Response Times, Attention, and Presence. Presence: Teleoperators and Virtual Environments 15(5) (October 2006) Rohling, R., Hollerbach, J.: Optimized fingertip mapping for teleoperation of dextrous robot hands. In: Proceedings IEEE International Conference on Robotics and Automation, IEEE Comput. Soc. Press (1993) Griffin, W.B., Findley, R.P., Turner, M.L., Cutkosky, M.R.: Calibration and mapping of a human hand for dexterous telemanipulation. In: ASME IMECE Symposium on Haptic Interfaces for Virtual Environments and Teleoperator Systems. (2000) Cutkosky, M.R., Howe, R.D.: Human grasp choice and robotic grasp analysis. In Venkataraman, S.T., Iberall, T., eds.: Dextrous Robot Hands. Springer New York, New York, NY (1990) Feix, T., Pawlik, R., Schmiedmayer, H., Romero, J., Kragic, D.: A comprehensive grasp taxonomy. In: Robotics, Science and Systems: Workshop on Understanding the Human Hand for Advancing Robotic Manipulation. (2009) 9. Cobos, S., Ferre, M., Sánchez-Urán, M.A., Ortego, J., Aracil, R.: Human hand descriptions and gesture recognition for object manipulation. Computer methods in biomechanics and biomedical engineering 13(3) (June 2010) Bicchi, A., Kumar, V.: Robotic grasping and contact: a review. In: Proceedings 2000 ICRA. Millennium Conference. IEEE International Conference on Robotics and Automation. Volume 1., IEEE (2000) Tenzer, Y., Jentoft, L.P., Howe, R.D.: Inexpensive and easily customized tactile array sensors using MEMS barometers chips. Under Review (2012) 12. Usui, S., Amidror, I.: Digital low-pass differentiation for biological signal processing. IEEE transactions on bio-medical engineering 29(10) (October 1982)
The Effect of Haptic Feedback on Basic Social Interaction within Shared Virtual Environments
 The Effect of Haptic Feedback on Basic Social Interaction within Shared Virtual Environments Elias Giannopoulos 1, Victor Eslava 2, María Oyarzabal 2, Teresa Hierro 2, Laura González 2, Manuel Ferre 2,
The Effect of Haptic Feedback on Basic Social Interaction within Shared Virtual Environments Elias Giannopoulos 1, Victor Eslava 2, María Oyarzabal 2, Teresa Hierro 2, Laura González 2, Manuel Ferre 2,
Telerobotics Requirements for Remote Handling in Nuclear Facilities 17538
 Telerobotics Requirements for Remote Handling in Nuclear Facilities 17538 Manuel Ferre, Sofía Coloma, Jose Breñosa, Luis Rubio Universidad Politécnica de Madrid. Centre for Automation and Robotics UPM-CSIC
Telerobotics Requirements for Remote Handling in Nuclear Facilities 17538 Manuel Ferre, Sofía Coloma, Jose Breñosa, Luis Rubio Universidad Politécnica de Madrid. Centre for Automation and Robotics UPM-CSIC
This article presents a new approach to the. The Feel of MEMS Barometers. Inexpensive and Easily Customized Tactile Array Sensors
 The Feel of MEMS Barometers corel Inexpensive and Easily Customized Tactile Array s By Yaroslav Tenzer, Leif P. Jentoft, and Robert D. Howe This article presents a new approach to the construction of tactile
The Feel of MEMS Barometers corel Inexpensive and Easily Customized Tactile Array s By Yaroslav Tenzer, Leif P. Jentoft, and Robert D. Howe This article presents a new approach to the construction of tactile
Five-fingered Robot Hand using Ultrasonic Motors and Elastic Elements *
 Proceedings of the 2005 IEEE International Conference on Robotics and Automation Barcelona, Spain, April 2005 Five-fingered Robot Hand using Ultrasonic Motors and Elastic Elements * Ikuo Yamano Department
Proceedings of the 2005 IEEE International Conference on Robotics and Automation Barcelona, Spain, April 2005 Five-fingered Robot Hand using Ultrasonic Motors and Elastic Elements * Ikuo Yamano Department
Chapter 2 Introduction to Haptics 2.1 Definition of Haptics
 Chapter 2 Introduction to Haptics 2.1 Definition of Haptics The word haptic originates from the Greek verb hapto to touch and therefore refers to the ability to touch and manipulate objects. The haptic
Chapter 2 Introduction to Haptics 2.1 Definition of Haptics The word haptic originates from the Greek verb hapto to touch and therefore refers to the ability to touch and manipulate objects. The haptic
Booklet of teaching units
 International Master Program in Mechatronic Systems for Rehabilitation Booklet of teaching units Third semester (M2 S1) Master Sciences de l Ingénieur Université Pierre et Marie Curie Paris 6 Boite 164,
International Master Program in Mechatronic Systems for Rehabilitation Booklet of teaching units Third semester (M2 S1) Master Sciences de l Ingénieur Université Pierre et Marie Curie Paris 6 Boite 164,
Sensing the Texture of Surfaces by Anthropomorphic Soft Fingertips with Multi-Modal Sensors
 Sensing the Texture of Surfaces by Anthropomorphic Soft Fingertips with Multi-Modal Sensors Yasunori Tada, Koh Hosoda, Yusuke Yamasaki, and Minoru Asada Department of Adaptive Machine Systems, HANDAI Frontier
Sensing the Texture of Surfaces by Anthropomorphic Soft Fingertips with Multi-Modal Sensors Yasunori Tada, Koh Hosoda, Yusuke Yamasaki, and Minoru Asada Department of Adaptive Machine Systems, HANDAI Frontier
Soft Bionics Hands with a Sense of Touch Through an Electronic Skin
 Soft Bionics Hands with a Sense of Touch Through an Electronic Skin Mahmoud Tavakoli, Rui Pedro Rocha, João Lourenço, Tong Lu and Carmel Majidi Abstract Integration of compliance into the Robotics hands
Soft Bionics Hands with a Sense of Touch Through an Electronic Skin Mahmoud Tavakoli, Rui Pedro Rocha, João Lourenço, Tong Lu and Carmel Majidi Abstract Integration of compliance into the Robotics hands
On the Variability of Tactile Signals During Grasping
 On the Variability of Tactile Signals During Grasping Qian Wan * and Robert D. Howe * * Harvard School of Engineering and Applied Sciences, Cambridge, USA Centre for Intelligent Systems Research, Deakin
On the Variability of Tactile Signals During Grasping Qian Wan * and Robert D. Howe * * Harvard School of Engineering and Applied Sciences, Cambridge, USA Centre for Intelligent Systems Research, Deakin
Development and Testing of a Telemanipulation System with Arm and Hand Motion
 Development and Testing of a Telemanipulation System with Arm and Hand Motion Michael L. Turner, Ryan P. Findley, Weston B. Griffin, Mark R. Cutkosky and Daniel H. Gomez Dexterous Manipulation Laboratory
Development and Testing of a Telemanipulation System with Arm and Hand Motion Michael L. Turner, Ryan P. Findley, Weston B. Griffin, Mark R. Cutkosky and Daniel H. Gomez Dexterous Manipulation Laboratory
Shape Memory Alloy Actuator Controller Design for Tactile Displays
 34th IEEE Conference on Decision and Control New Orleans, Dec. 3-5, 995 Shape Memory Alloy Actuator Controller Design for Tactile Displays Robert D. Howe, Dimitrios A. Kontarinis, and William J. Peine
34th IEEE Conference on Decision and Control New Orleans, Dec. 3-5, 995 Shape Memory Alloy Actuator Controller Design for Tactile Displays Robert D. Howe, Dimitrios A. Kontarinis, and William J. Peine
Fuzzy logic for task space telemanipulation of a five fingered robotic hand
 New Jersey Institute of Technology Digital Commons @ NJIT Theses Theses and Dissertations Fall 2012 Fuzzy logic for task space telemanipulation of a five fingered robotic hand Raaghavann Srinivasan New
New Jersey Institute of Technology Digital Commons @ NJIT Theses Theses and Dissertations Fall 2012 Fuzzy logic for task space telemanipulation of a five fingered robotic hand Raaghavann Srinivasan New
Toward a Task Space Framework for Gesture Commanded Telemanipulation
 212 IEEE RO-MAN: The 21st IEEE International Symposium on Robot and Human Interactive Communication. September 9-13, 212. Paris, France. Toward a Task Space Framework for Gesture Commanded Telemanipulation
212 IEEE RO-MAN: The 21st IEEE International Symposium on Robot and Human Interactive Communication. September 9-13, 212. Paris, France. Toward a Task Space Framework for Gesture Commanded Telemanipulation
FORCE-TORQUE sensors find wide application in industry
 IEEE TRANSACTIONS ON MECHATRONICS 1 Robust and Inexpensive 6-Axis Force-Torque Sensors using MEMS Barometers Jacob W. Guggenheim, Student Member, IEEE, Leif P. Jentoft, Student Member, IEEE, Yaroslav Tenzer,
IEEE TRANSACTIONS ON MECHATRONICS 1 Robust and Inexpensive 6-Axis Force-Torque Sensors using MEMS Barometers Jacob W. Guggenheim, Student Member, IEEE, Leif P. Jentoft, Student Member, IEEE, Yaroslav Tenzer,
Design and Control of the BUAA Four-Fingered Hand
 Proceedings of the 2001 IEEE International Conference on Robotics & Automation Seoul, Korea May 21-26, 2001 Design and Control of the BUAA Four-Fingered Hand Y. Zhang, Z. Han, H. Zhang, X. Shang, T. Wang,
Proceedings of the 2001 IEEE International Conference on Robotics & Automation Seoul, Korea May 21-26, 2001 Design and Control of the BUAA Four-Fingered Hand Y. Zhang, Z. Han, H. Zhang, X. Shang, T. Wang,
Here I present more details about the methods of the experiments which are. described in the main text, and describe two additional examinations which
 Supplementary Note Here I present more details about the methods of the experiments which are described in the main text, and describe two additional examinations which assessed DF s proprioceptive performance
Supplementary Note Here I present more details about the methods of the experiments which are described in the main text, and describe two additional examinations which assessed DF s proprioceptive performance
Wearable Haptic Display to Present Gravity Sensation
 Wearable Haptic Display to Present Gravity Sensation Preliminary Observations and Device Design Kouta Minamizawa*, Hiroyuki Kajimoto, Naoki Kawakami*, Susumu, Tachi* (*) The University of Tokyo, Japan
Wearable Haptic Display to Present Gravity Sensation Preliminary Observations and Device Design Kouta Minamizawa*, Hiroyuki Kajimoto, Naoki Kawakami*, Susumu, Tachi* (*) The University of Tokyo, Japan
II. TELEOPERATION FRAMEWORK. A. Forward mapping
 tracked using a Leap Motion IR camera (Leap Motion, Inc, San Francisco, CA, USA) and the forces are displayed on the fingertips using wearable thimbles. Cutaneous feedback provides the user with a reliable
tracked using a Leap Motion IR camera (Leap Motion, Inc, San Francisco, CA, USA) and the forces are displayed on the fingertips using wearable thimbles. Cutaneous feedback provides the user with a reliable
Elements of Haptic Interfaces
 Elements of Haptic Interfaces Katherine J. Kuchenbecker Department of Mechanical Engineering and Applied Mechanics University of Pennsylvania kuchenbe@seas.upenn.edu Course Notes for MEAM 625, University
Elements of Haptic Interfaces Katherine J. Kuchenbecker Department of Mechanical Engineering and Applied Mechanics University of Pennsylvania kuchenbe@seas.upenn.edu Course Notes for MEAM 625, University
phri: specialization groups HS PRELIMINARY
 phri: specialization groups HS 2019 - PRELIMINARY 1) VELOCITY ESTIMATION WITH HALL EFFECT SENSOR 2) VELOCITY MEASUREMENT: TACHOMETER VS HALL SENSOR 3) POSITION AND VELOCTIY ESTIMATION BASED ON KALMAN FILTER
phri: specialization groups HS 2019 - PRELIMINARY 1) VELOCITY ESTIMATION WITH HALL EFFECT SENSOR 2) VELOCITY MEASUREMENT: TACHOMETER VS HALL SENSOR 3) POSITION AND VELOCTIY ESTIMATION BASED ON KALMAN FILTER
Texture recognition using force sensitive resistors
 Texture recognition using force sensitive resistors SAYED, Muhammad, DIAZ GARCIA,, Jose Carlos and ALBOUL, Lyuba Available from Sheffield Hallam University Research
Texture recognition using force sensitive resistors SAYED, Muhammad, DIAZ GARCIA,, Jose Carlos and ALBOUL, Lyuba Available from Sheffield Hallam University Research
Modelling and Simulation of Tactile Sensing System of Fingers for Intelligent Robotic Manipulation Control
 20th International Congress on Modelling and Simulation, Adelaide, Australia, 1 6 December 2013 www.mssanz.org.au/modsim2013 Modelling and Simulation of Tactile Sensing System of Fingers for Intelligent
20th International Congress on Modelling and Simulation, Adelaide, Australia, 1 6 December 2013 www.mssanz.org.au/modsim2013 Modelling and Simulation of Tactile Sensing System of Fingers for Intelligent
Methods for Haptic Feedback in Teleoperated Robotic Surgery
 Young Group 5 1 Methods for Haptic Feedback in Teleoperated Robotic Surgery Paper Review Jessie Young Group 5: Haptic Interface for Surgical Manipulator System March 12, 2012 Paper Selection: A. M. Okamura.
Young Group 5 1 Methods for Haptic Feedback in Teleoperated Robotic Surgery Paper Review Jessie Young Group 5: Haptic Interface for Surgical Manipulator System March 12, 2012 Paper Selection: A. M. Okamura.
DESIGN OF A 2-FINGER HAND EXOSKELETON FOR VR GRASPING SIMULATION
 DESIGN OF A 2-FINGER HAND EXOSKELETON FOR VR GRASPING SIMULATION Panagiotis Stergiopoulos Philippe Fuchs Claude Laurgeau Robotics Center-Ecole des Mines de Paris 60 bd St-Michel, 75272 Paris Cedex 06,
DESIGN OF A 2-FINGER HAND EXOSKELETON FOR VR GRASPING SIMULATION Panagiotis Stergiopoulos Philippe Fuchs Claude Laurgeau Robotics Center-Ecole des Mines de Paris 60 bd St-Michel, 75272 Paris Cedex 06,
A Very High Level Interface to Teleoperate a Robot via Web including Augmented Reality
 A Very High Level Interface to Teleoperate a Robot via Web including Augmented Reality R. Marín, P. J. Sanz and J. S. Sánchez Abstract The system consists of a multirobot architecture that gives access
A Very High Level Interface to Teleoperate a Robot via Web including Augmented Reality R. Marín, P. J. Sanz and J. S. Sánchez Abstract The system consists of a multirobot architecture that gives access
Feedback Strategies for Shared Control in Dexterous Telemanipulation
 Feedback Strategies for Shared Control in Dexterous Telemanipulation Weston B. Griffin, William R. Provancher, and Mark R. Cutkosky Dexterous Manipulation Laboratory Stanford University Bldg. 56, 44 Panama
Feedback Strategies for Shared Control in Dexterous Telemanipulation Weston B. Griffin, William R. Provancher, and Mark R. Cutkosky Dexterous Manipulation Laboratory Stanford University Bldg. 56, 44 Panama
May Edited by: Roemi E. Fernández Héctor Montes
 May 2016 Edited by: Roemi E. Fernández Héctor Montes RoboCity16 Open Conference on Future Trends in Robotics Editors Roemi E. Fernández Saavedra Héctor Montes Franceschi Madrid, 26 May 2016 Edited by:
May 2016 Edited by: Roemi E. Fernández Héctor Montes RoboCity16 Open Conference on Future Trends in Robotics Editors Roemi E. Fernández Saavedra Héctor Montes Franceschi Madrid, 26 May 2016 Edited by:
Robot Hands: Mechanics, Contact Constraints, and Design for Open-loop Performance
 Robot Hands: Mechanics, Contact Constraints, and Design for Open-loop Performance Aaron M. Dollar John J. Lee Associate Professor of Mechanical Engineering and Materials Science Aerial Robotics Yale GRAB
Robot Hands: Mechanics, Contact Constraints, and Design for Open-loop Performance Aaron M. Dollar John J. Lee Associate Professor of Mechanical Engineering and Materials Science Aerial Robotics Yale GRAB
Cutaneous Feedback of Fingertip Deformation and Vibration for Palpation in Robotic Surgery
 Cutaneous Feedback of Fingertip Deformation and Vibration for Palpation in Robotic Surgery Claudio Pacchierotti Domenico Prattichizzo Katherine J. Kuchenbecker Motivation Despite its expected clinical
Cutaneous Feedback of Fingertip Deformation and Vibration for Palpation in Robotic Surgery Claudio Pacchierotti Domenico Prattichizzo Katherine J. Kuchenbecker Motivation Despite its expected clinical
2. Introduction to Computer Haptics
 2. Introduction to Computer Haptics Seungmoon Choi, Ph.D. Assistant Professor Dept. of Computer Science and Engineering POSTECH Outline Basics of Force-Feedback Haptic Interfaces Introduction to Computer
2. Introduction to Computer Haptics Seungmoon Choi, Ph.D. Assistant Professor Dept. of Computer Science and Engineering POSTECH Outline Basics of Force-Feedback Haptic Interfaces Introduction to Computer
Computer Haptics and Applications
 Computer Haptics and Applications EURON Summer School 2003 Cagatay Basdogan, Ph.D. College of Engineering Koc University, Istanbul, 80910 (http://network.ku.edu.tr/~cbasdogan) Resources: EURON Summer School
Computer Haptics and Applications EURON Summer School 2003 Cagatay Basdogan, Ph.D. College of Engineering Koc University, Istanbul, 80910 (http://network.ku.edu.tr/~cbasdogan) Resources: EURON Summer School
ISMCR2004. Abstract. 2. The mechanism of the master-slave arm of Telesar II. 1. Introduction. D21-Page 1
 Development of Multi-D.O.F. Master-Slave Arm with Bilateral Impedance Control for Telexistence Riichiro Tadakuma, Kiyohiro Sogen, Hiroyuki Kajimoto, Naoki Kawakami, and Susumu Tachi 7-3-1 Hongo, Bunkyo-ku,
Development of Multi-D.O.F. Master-Slave Arm with Bilateral Impedance Control for Telexistence Riichiro Tadakuma, Kiyohiro Sogen, Hiroyuki Kajimoto, Naoki Kawakami, and Susumu Tachi 7-3-1 Hongo, Bunkyo-ku,
Virtual Chromatic Percussions Simulated by Pseudo-Haptic and Vibrotactile Feedback
 Virtual Chromatic Percussions Simulated by Pseudo-Haptic and Vibrotactile Feedback Taku Hachisu The University of Electro- Communications 1-5-1 Chofugaoka, Chofu, Tokyo 182-8585, Japan +81 42 443 5363
Virtual Chromatic Percussions Simulated by Pseudo-Haptic and Vibrotactile Feedback Taku Hachisu The University of Electro- Communications 1-5-1 Chofugaoka, Chofu, Tokyo 182-8585, Japan +81 42 443 5363
HAND-SHAPED INTERFACE FOR INTUITIVE HUMAN- ROBOT COMMUNICATION THROUGH HAPTIC MEDIA
 HAND-SHAPED INTERFACE FOR INTUITIVE HUMAN- ROBOT COMMUNICATION THROUGH HAPTIC MEDIA RIKU HIKIJI AND SHUJI HASHIMOTO Department of Applied Physics, School of Science and Engineering, Waseda University 3-4-1
HAND-SHAPED INTERFACE FOR INTUITIVE HUMAN- ROBOT COMMUNICATION THROUGH HAPTIC MEDIA RIKU HIKIJI AND SHUJI HASHIMOTO Department of Applied Physics, School of Science and Engineering, Waseda University 3-4-1
Department of Robotics Ritsumeikan University
 Department of Robotics Ritsumeikan University Shinichi Hirai Dept. Robotics Ritsumeikan Univ. Hanoi Institute of Technology Hanoi, Vietnam, Dec. 20, 2008 http://www.ritsumei.ac.jp/se/rm/robo/index-e.htm
Department of Robotics Ritsumeikan University Shinichi Hirai Dept. Robotics Ritsumeikan Univ. Hanoi Institute of Technology Hanoi, Vietnam, Dec. 20, 2008 http://www.ritsumei.ac.jp/se/rm/robo/index-e.htm
Whole-Hand Kinesthetic Feedback and Haptic Perception in Dextrous Virtual Manipulation
 100 IEEE TRANSACTIONS ON SYSTEMS, MAN, AND CYBERNETICS PART A: SYSTEMS AND HUMANS, VOL. 33, NO. 1, JANUARY 2003 Whole-Hand Kinesthetic Feedback and Haptic Perception in Dextrous Virtual Manipulation Costas
100 IEEE TRANSACTIONS ON SYSTEMS, MAN, AND CYBERNETICS PART A: SYSTEMS AND HUMANS, VOL. 33, NO. 1, JANUARY 2003 Whole-Hand Kinesthetic Feedback and Haptic Perception in Dextrous Virtual Manipulation Costas
An Underactuated Hand for Efficient Finger-Gaiting-Based Dexterous Manipulation
 Proceedings of the 2014 IEEE International Conference on Robotics and Biomimetics December 5-10, 2014, Bali, Indonesia An Underactuated Hand for Efficient Finger-Gaiting-Based Dexterous Manipulation Raymond
Proceedings of the 2014 IEEE International Conference on Robotics and Biomimetics December 5-10, 2014, Bali, Indonesia An Underactuated Hand for Efficient Finger-Gaiting-Based Dexterous Manipulation Raymond
A Study of Perceptual Performance in Haptic Virtual Environments
 Paper: Rb18-4-2617; 2006/5/22 A Study of Perceptual Performance in Haptic Virtual Marcia K. O Malley, and Gina Upperman Mechanical Engineering and Materials Science, Rice University 6100 Main Street, MEMS
Paper: Rb18-4-2617; 2006/5/22 A Study of Perceptual Performance in Haptic Virtual Marcia K. O Malley, and Gina Upperman Mechanical Engineering and Materials Science, Rice University 6100 Main Street, MEMS
Real-Time Bilateral Control for an Internet-Based Telerobotic System
 708 Real-Time Bilateral Control for an Internet-Based Telerobotic System Jahng-Hyon PARK, Joonyoung PARK and Seungjae MOON There is a growing tendency to use the Internet as the transmission medium of
708 Real-Time Bilateral Control for an Internet-Based Telerobotic System Jahng-Hyon PARK, Joonyoung PARK and Seungjae MOON There is a growing tendency to use the Internet as the transmission medium of
Multi-Modal Robot Skins: Proximity Servoing and its Applications
 Multi-Modal Robot Skins: Proximity Servoing and its Applications Workshop See and Touch: 1st Workshop on multimodal sensor-based robot control for HRI and soft manipulation at IROS 2015 Stefan Escaida
Multi-Modal Robot Skins: Proximity Servoing and its Applications Workshop See and Touch: 1st Workshop on multimodal sensor-based robot control for HRI and soft manipulation at IROS 2015 Stefan Escaida
The design and making of a humanoid robotic hand
 The design and making of a humanoid robotic hand presented by Tian Li Research associate Supervisor s Name: Prof. Nadia Magnenat Thalmann,Prof. Daniel Thalmann & Prof. Jianmin Zheng Project 2: Mixed Society
The design and making of a humanoid robotic hand presented by Tian Li Research associate Supervisor s Name: Prof. Nadia Magnenat Thalmann,Prof. Daniel Thalmann & Prof. Jianmin Zheng Project 2: Mixed Society
Salient features make a search easy
 Chapter General discussion This thesis examined various aspects of haptic search. It consisted of three parts. In the first part, the saliency of movability and compliance were investigated. In the second
Chapter General discussion This thesis examined various aspects of haptic search. It consisted of three parts. In the first part, the saliency of movability and compliance were investigated. In the second
Acquisition of Multi-Modal Expression of Slip through Pick-Up Experiences
 Acquisition of Multi-Modal Expression of Slip through Pick-Up Experiences Yasunori Tada* and Koh Hosoda** * Dept. of Adaptive Machine Systems, Osaka University ** Dept. of Adaptive Machine Systems, HANDAI
Acquisition of Multi-Modal Expression of Slip through Pick-Up Experiences Yasunori Tada* and Koh Hosoda** * Dept. of Adaptive Machine Systems, Osaka University ** Dept. of Adaptive Machine Systems, HANDAI
Mobile Manipulation in der Telerobotik
 Mobile Manipulation in der Telerobotik Angelika Peer, Thomas Schauß, Ulrich Unterhinninghofen, Martin Buss angelika.peer@tum.de schauss@tum.de ulrich.unterhinninghofen@tum.de mb@tum.de Lehrstuhl für Steuerungs-
Mobile Manipulation in der Telerobotik Angelika Peer, Thomas Schauß, Ulrich Unterhinninghofen, Martin Buss angelika.peer@tum.de schauss@tum.de ulrich.unterhinninghofen@tum.de mb@tum.de Lehrstuhl für Steuerungs-
EXPERIMENTAL BILATERAL CONTROL TELEMANIPULATION USING A VIRTUAL EXOSKELETON
 EXPERIMENTAL BILATERAL CONTROL TELEMANIPULATION USING A VIRTUAL EXOSKELETON Josep Amat 1, Alícia Casals 2, Manel Frigola 2, Enric Martín 2 1Robotics Institute. (IRI) UPC / CSIC Llorens Artigas 4-6, 2a
EXPERIMENTAL BILATERAL CONTROL TELEMANIPULATION USING A VIRTUAL EXOSKELETON Josep Amat 1, Alícia Casals 2, Manel Frigola 2, Enric Martín 2 1Robotics Institute. (IRI) UPC / CSIC Llorens Artigas 4-6, 2a
Laser-Assisted Telerobotic Control for Enhancing Manipulation Capabilities of Persons with Disabilities
 The 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-22, 2010, Taipei, Taiwan Laser-Assisted Telerobotic Control for Enhancing Manipulation Capabilities of Persons with
The 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-22, 2010, Taipei, Taiwan Laser-Assisted Telerobotic Control for Enhancing Manipulation Capabilities of Persons with
Wireless Master-Slave Embedded Controller for a Teleoperated Anthropomorphic Robotic Arm with Gripping Force Sensing
 Wireless Master-Slave Embedded Controller for a Teleoperated Anthropomorphic Robotic Arm with Gripping Force Sensing Presented by: Benjamin B. Rhoades ECGR 6185 Adv. Embedded Systems January 16 th 2013
Wireless Master-Slave Embedded Controller for a Teleoperated Anthropomorphic Robotic Arm with Gripping Force Sensing Presented by: Benjamin B. Rhoades ECGR 6185 Adv. Embedded Systems January 16 th 2013
HAPTIC DEVICES FOR DESKTOP VIRTUAL PROTOTYPING APPLICATIONS
 The 3rd International Conference on Computational Mechanics and Virtual Engineering COMEC 2009 29 30 OCTOBER 2009, Brasov, Romania HAPTIC DEVICES FOR DESKTOP VIRTUAL PROTOTYPING APPLICATIONS A. Fratu 1,
The 3rd International Conference on Computational Mechanics and Virtual Engineering COMEC 2009 29 30 OCTOBER 2009, Brasov, Romania HAPTIC DEVICES FOR DESKTOP VIRTUAL PROTOTYPING APPLICATIONS A. Fratu 1,
Robust Haptic Teleoperation of a Mobile Manipulation Platform
 Robust Haptic Teleoperation of a Mobile Manipulation Platform Jaeheung Park and Oussama Khatib Stanford AI Laboratory Stanford University http://robotics.stanford.edu Abstract. This paper presents a new
Robust Haptic Teleoperation of a Mobile Manipulation Platform Jaeheung Park and Oussama Khatib Stanford AI Laboratory Stanford University http://robotics.stanford.edu Abstract. This paper presents a new
DETC AN ADMITTANCE GLOVE MECHANISM FOR CONTROLLING A MOBILE ROBOT
 Proceedings of the ASME 212 International Design Engineering Technical Conferences & Computers and Information in Engineering Conference IDETC/CIE 212 August 12-15, 212, Chicago, IL, USA DETC212-71284
Proceedings of the ASME 212 International Design Engineering Technical Conferences & Computers and Information in Engineering Conference IDETC/CIE 212 August 12-15, 212, Chicago, IL, USA DETC212-71284
Figure 2: Examples of (Left) one pull trial with a 3.5 tube size and (Right) different pull angles with 4.5 tube size. Figure 1: Experimental Setup.
 one pull trial with a 3.5 tube size and (Right) different pull angles with 4.5 tube size. Figure 1: Experimental Setup.") Haptic Classification and Faulty Sensor Compensation for a Robotic Hand Hannah Stuart, Paul Karplus, Habiya Beg Department of Mechanical Engineering, Stanford University Abstract Currently, robots operating
Haptic Classification and Faulty Sensor Compensation for a Robotic Hand Hannah Stuart, Paul Karplus, Habiya Beg Department of Mechanical Engineering, Stanford University Abstract Currently, robots operating
CONTACT FORCE PERCEPTION WITH AN UNGROUNDED HAPTIC INTERFACE
 99 ASME IMECE th Annual Symposium on Haptic Interfaces, Dallas, TX, Nov. -. CONTACT FORCE PERCEPTION WITH AN UNGROUNDED HAPTIC INTERFACE Christopher Richard crichard@cdr.stanford.edu Mark R. Cutkosky Center
99 ASME IMECE th Annual Symposium on Haptic Interfaces, Dallas, TX, Nov. -. CONTACT FORCE PERCEPTION WITH AN UNGROUNDED HAPTIC INTERFACE Christopher Richard crichard@cdr.stanford.edu Mark R. Cutkosky Center
On the Development of a Specialized Flexible Gripper for Garment Handling
 On the Development of a Specialized Flexible Gripper for Garment Handling Thuy-Hong-Loan Le, Michal Jilich, Alberto Landini, Matteo Zoppi, Dimiter Zlatanov, and Rezia Molfino PMAR lab, DIME, University
On the Development of a Specialized Flexible Gripper for Garment Handling Thuy-Hong-Loan Le, Michal Jilich, Alberto Landini, Matteo Zoppi, Dimiter Zlatanov, and Rezia Molfino PMAR lab, DIME, University
Robust Hand Gesture Recognition for Robotic Hand Control
 Robust Hand Gesture Recognition for Robotic Hand Control Ankit Chaudhary Robust Hand Gesture Recognition for Robotic Hand Control 123 Ankit Chaudhary Department of Computer Science Northwest Missouri State
Robust Hand Gesture Recognition for Robotic Hand Control Ankit Chaudhary Robust Hand Gesture Recognition for Robotic Hand Control 123 Ankit Chaudhary Department of Computer Science Northwest Missouri State
Computer Assisted Medical Interventions
 Outline Computer Assisted Medical Interventions Force control, collaborative manipulation and telemanipulation Bernard BAYLE Joint course University of Strasbourg, University of Houston, Telecom Paris
Outline Computer Assisted Medical Interventions Force control, collaborative manipulation and telemanipulation Bernard BAYLE Joint course University of Strasbourg, University of Houston, Telecom Paris
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute Use an example to explain what is admittance control? You may refer to exoskeleton
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute Use an example to explain what is admittance control? You may refer to exoskeleton
Experiments with Haptic Perception in a Robotic Hand
 Experiments with Haptic Perception in a Robotic Hand Magnus Johnsson 1,2 Robert Pallbo 1 Christian Balkenius 2 1 Dept. of Computer Science and 2 Lund University Cognitive Science Lund University, Sweden
Experiments with Haptic Perception in a Robotic Hand Magnus Johnsson 1,2 Robert Pallbo 1 Christian Balkenius 2 1 Dept. of Computer Science and 2 Lund University Cognitive Science Lund University, Sweden
UNIVERSIDAD CARLOS III DE MADRID ESCUELA POLITÉCNICA SUPERIOR
 UNIVERSIDAD CARLOS III DE MADRID ESCUELA POLITÉCNICA SUPERIOR TRABAJO DE FIN DE GRADO GRADO EN INGENIERÍA DE SISTEMAS DE COMUNICACIONES CONTROL CENTRALIZADO DE FLOTAS DE ROBOTS CENTRALIZED CONTROL FOR
UNIVERSIDAD CARLOS III DE MADRID ESCUELA POLITÉCNICA SUPERIOR TRABAJO DE FIN DE GRADO GRADO EN INGENIERÍA DE SISTEMAS DE COMUNICACIONES CONTROL CENTRALIZADO DE FLOTAS DE ROBOTS CENTRALIZED CONTROL FOR
Differences in Fitts Law Task Performance Based on Environment Scaling
 Differences in Fitts Law Task Performance Based on Environment Scaling Gregory S. Lee and Bhavani Thuraisingham Department of Computer Science University of Texas at Dallas 800 West Campbell Road Richardson,
Differences in Fitts Law Task Performance Based on Environment Scaling Gregory S. Lee and Bhavani Thuraisingham Department of Computer Science University of Texas at Dallas 800 West Campbell Road Richardson,
Perceptual Overlays for Teaching Advanced Driving Skills
 Perceptual Overlays for Teaching Advanced Driving Skills Brent Gillespie Micah Steele ARC Conference May 24, 2000 5/21/00 1 Outline 1. Haptics in the Driver-Vehicle Interface 2. Perceptual Overlays for
Perceptual Overlays for Teaching Advanced Driving Skills Brent Gillespie Micah Steele ARC Conference May 24, 2000 5/21/00 1 Outline 1. Haptics in the Driver-Vehicle Interface 2. Perceptual Overlays for
Tele-operation of a Robot Arm with Electro Tactile Feedback
 F Tele-operation of a Robot Arm with Electro Tactile Feedback Daniel S. Pamungkas and Koren Ward * Abstract Tactile feedback from a remotely controlled robotic arm can facilitate certain tasks by enabling
F Tele-operation of a Robot Arm with Electro Tactile Feedback Daniel S. Pamungkas and Koren Ward * Abstract Tactile feedback from a remotely controlled robotic arm can facilitate certain tasks by enabling
Tactile Interactions During Robot Assisted Surgical Interventions. Lakmal Seneviratne
 Tactile Interactions During Robot Assisted Surgical Interventions Lakmal Seneviratne Professor of Mechatronics Kings College London Professor of Mechanical Eng. Khalifa Univeristy, Abu Dhabi. 1 Overview
Tactile Interactions During Robot Assisted Surgical Interventions Lakmal Seneviratne Professor of Mechatronics Kings College London Professor of Mechanical Eng. Khalifa Univeristy, Abu Dhabi. 1 Overview
The Control of Avatar Motion Using Hand Gesture
 The Control of Avatar Motion Using Hand Gesture ChanSu Lee, SangWon Ghyme, ChanJong Park Human Computing Dept. VR Team Electronics and Telecommunications Research Institute 305-350, 161 Kajang-dong, Yusong-gu,
The Control of Avatar Motion Using Hand Gesture ChanSu Lee, SangWon Ghyme, ChanJong Park Human Computing Dept. VR Team Electronics and Telecommunications Research Institute 305-350, 161 Kajang-dong, Yusong-gu,
Dexterous Anthropomorphic Robot Hand With Distributed Tactile Sensor: Gifu Hand II
 296 IEEE/ASME TRANSACTIONS ON MECHATRONICS, VOL. 7, NO. 3, SEPTEMBER 2002 Dexterous Anthropomorphic Robot Hand With Distributed Tactile Sensor: Gifu Hand II Haruhisa Kawasaki, Tsuneo Komatsu, and Kazunao
296 IEEE/ASME TRANSACTIONS ON MECHATRONICS, VOL. 7, NO. 3, SEPTEMBER 2002 Dexterous Anthropomorphic Robot Hand With Distributed Tactile Sensor: Gifu Hand II Haruhisa Kawasaki, Tsuneo Komatsu, and Kazunao
Haptic Rendering CPSC / Sonny Chan University of Calgary
 Haptic Rendering CPSC 599.86 / 601.86 Sonny Chan University of Calgary Today s Outline Announcements Human haptic perception Anatomy of a visual-haptic simulation Virtual wall and potential field rendering
Haptic Rendering CPSC 599.86 / 601.86 Sonny Chan University of Calgary Today s Outline Announcements Human haptic perception Anatomy of a visual-haptic simulation Virtual wall and potential field rendering
Figure 2. Haptic human perception and display. 2.2 Pseudo-Haptic Feedback 2. RELATED WORKS 2.1 Haptic Simulation of Tapping an Object
 Virtual Chromatic Percussions Simulated by Pseudo-Haptic and Vibrotactile Feedback Taku Hachisu 1 Gabriel Cirio 2 Maud Marchal 2 Anatole Lécuyer 2 Hiroyuki Kajimoto 1,3 1 The University of Electro- Communications
Virtual Chromatic Percussions Simulated by Pseudo-Haptic and Vibrotactile Feedback Taku Hachisu 1 Gabriel Cirio 2 Maud Marchal 2 Anatole Lécuyer 2 Hiroyuki Kajimoto 1,3 1 The University of Electro- Communications
A Full Tactile Sensing Suite for Dextrous Robot Hands and Use in Contact Force Control
 Proceedings of the 1996 IEEE International Conference on Robotics and Automation Minneapolis, Minnesota - April 1996 A Full Tactile Sensing Suite for Dextrous Robot Hands and Use in Contact Force Control
Proceedings of the 1996 IEEE International Conference on Robotics and Automation Minneapolis, Minnesota - April 1996 A Full Tactile Sensing Suite for Dextrous Robot Hands and Use in Contact Force Control
Push Path Improvement with Policy based Reinforcement Learning
 1 Push Path Improvement with Policy based Reinforcement Learning Junhu He TAMS Department of Informatics University of Hamburg Cross-modal Interaction In Natural and Artificial Cognitive Systems (CINACS)
1 Push Path Improvement with Policy based Reinforcement Learning Junhu He TAMS Department of Informatics University of Hamburg Cross-modal Interaction In Natural and Artificial Cognitive Systems (CINACS)
CS277 - Experimental Haptics Lecture 2. Haptic Rendering
 CS277 - Experimental Haptics Lecture 2 Haptic Rendering Outline Announcements Human haptic perception Anatomy of a visual-haptic simulation Virtual wall and potential field rendering A note on timing...
CS277 - Experimental Haptics Lecture 2 Haptic Rendering Outline Announcements Human haptic perception Anatomy of a visual-haptic simulation Virtual wall and potential field rendering A note on timing...
Multichannel vibrotactile display for sensory substitution during teleoperation
 2001 SPIE International Symposium on Intelligent Systems and Advanced Manufacturing, Newton, MA, 28-31 October Multichannel vibrotactile display for sensory substitution during teleoperation Thomas Debus
2001 SPIE International Symposium on Intelligent Systems and Advanced Manufacturing, Newton, MA, 28-31 October Multichannel vibrotactile display for sensory substitution during teleoperation Thomas Debus
Discrimination of Virtual Haptic Textures Rendered with Different Update Rates
 Discrimination of Virtual Haptic Textures Rendered with Different Update Rates Seungmoon Choi and Hong Z. Tan Haptic Interface Research Laboratory Purdue University 465 Northwestern Avenue West Lafayette,
Discrimination of Virtual Haptic Textures Rendered with Different Update Rates Seungmoon Choi and Hong Z. Tan Haptic Interface Research Laboratory Purdue University 465 Northwestern Avenue West Lafayette,
APPEAL DECISION. Appeal No USA. Tokyo, Japan. Tokyo, Japan. Tokyo, Japan. Tokyo, Japan
 APPEAL DECISION Appeal No. 2013-6730 USA Appellant IMMERSION CORPORATION Tokyo, Japan Patent Attorney OKABE, Yuzuru Tokyo, Japan Patent Attorney OCHI, Takao Tokyo, Japan Patent Attorney TAKAHASHI, Seiichiro
APPEAL DECISION Appeal No. 2013-6730 USA Appellant IMMERSION CORPORATION Tokyo, Japan Patent Attorney OKABE, Yuzuru Tokyo, Japan Patent Attorney OCHI, Takao Tokyo, Japan Patent Attorney TAKAHASHI, Seiichiro
CHARACTERIZING THE HUMAN WRIST FOR IMPROVED HAPTIC INTERACTION
 Proceedings of IMECE 23 23 International Mechanical Engineering Congress and Exposition November 16-21, 23, Washington, D.C. USA IMECE23-4217 CHARACTERIZING THE HUMAN WRIST FOR IMPROVED HAPTIC INTERACTION
Proceedings of IMECE 23 23 International Mechanical Engineering Congress and Exposition November 16-21, 23, Washington, D.C. USA IMECE23-4217 CHARACTERIZING THE HUMAN WRIST FOR IMPROVED HAPTIC INTERACTION
Biomimetic Design of Actuators, Sensors and Robots
 Biomimetic Design of Actuators, Sensors and Robots Takashi Maeno, COE Member of autonomous-cooperative robotics group Department of Mechanical Engineering Keio University Abstract Biological life has greatly
Biomimetic Design of Actuators, Sensors and Robots Takashi Maeno, COE Member of autonomous-cooperative robotics group Department of Mechanical Engineering Keio University Abstract Biological life has greatly
Development of a telepresence agent
 Author: Chung-Chen Tsai, Yeh-Liang Hsu (2001-04-06); recommended: Yeh-Liang Hsu (2001-04-06); last updated: Yeh-Liang Hsu (2004-03-23). Note: This paper was first presented at. The revised paper was presented
Author: Chung-Chen Tsai, Yeh-Liang Hsu (2001-04-06); recommended: Yeh-Liang Hsu (2001-04-06); last updated: Yeh-Liang Hsu (2004-03-23). Note: This paper was first presented at. The revised paper was presented
Mobile Haptic Interaction with Extended Real or Virtual Environments
 Mobile Haptic Interaction with Extended Real or Virtual Environments Norbert Nitzsche Uwe D. Hanebeck Giinther Schmidt Institute of Automatic Control Engineering Technische Universitat Miinchen, 80290
Mobile Haptic Interaction with Extended Real or Virtual Environments Norbert Nitzsche Uwe D. Hanebeck Giinther Schmidt Institute of Automatic Control Engineering Technische Universitat Miinchen, 80290
Prediction and Correction Algorithm for a Gesture Controlled Robotic Arm
 Prediction and Correction Algorithm for a Gesture Controlled Robotic Arm Pushkar Shukla 1, Shehjar Safaya 2, Utkarsh Sharma 3 B.Tech, College of Engineering Roorkee, Roorkee, India 1 B.Tech, College of
Prediction and Correction Algorithm for a Gesture Controlled Robotic Arm Pushkar Shukla 1, Shehjar Safaya 2, Utkarsh Sharma 3 B.Tech, College of Engineering Roorkee, Roorkee, India 1 B.Tech, College of
Cognitive robots and emotional intelligence Cloud robotics Ethical, legal and social issues of robotic Construction robots Human activities in many
 Preface The jubilee 25th International Conference on Robotics in Alpe-Adria-Danube Region, RAAD 2016 was held in the conference centre of the Best Western Hotel M, Belgrade, Serbia, from 30 June to 2 July
Preface The jubilee 25th International Conference on Robotics in Alpe-Adria-Danube Region, RAAD 2016 was held in the conference centre of the Best Western Hotel M, Belgrade, Serbia, from 30 June to 2 July
Wednesday, October 29, :00-04:00pm EB: 3546D. TELEOPERATION OF MOBILE MANIPULATORS By Yunyi Jia Advisor: Prof.
 Wednesday, October 29, 2014 02:00-04:00pm EB: 3546D TELEOPERATION OF MOBILE MANIPULATORS By Yunyi Jia Advisor: Prof. Ning Xi ABSTRACT Mobile manipulators provide larger working spaces and more flexibility
Wednesday, October 29, 2014 02:00-04:00pm EB: 3546D TELEOPERATION OF MOBILE MANIPULATORS By Yunyi Jia Advisor: Prof. Ning Xi ABSTRACT Mobile manipulators provide larger working spaces and more flexibility
CS277 - Experimental Haptics Lecture 1. Introduction to Haptics
 CS277 - Experimental Haptics Lecture 1 Introduction to Haptics Haptic Interfaces Enables physical interaction with virtual objects Haptic Rendering Potential Fields Polygonal Meshes Implicit Surfaces Volumetric
CS277 - Experimental Haptics Lecture 1 Introduction to Haptics Haptic Interfaces Enables physical interaction with virtual objects Haptic Rendering Potential Fields Polygonal Meshes Implicit Surfaces Volumetric
MOBAJES: Multi-user Gesture Interaction System with Wearable Mobile Device
 MOBAJES: Multi-user Gesture Interaction System with Wearable Mobile Device Enkhbat Davaasuren and Jiro Tanaka 1-1-1 Tennodai, Tsukuba, Ibaraki 305-8577 Japan {enkhee,jiro}@iplab.cs.tsukuba.ac.jp Abstract.
MOBAJES: Multi-user Gesture Interaction System with Wearable Mobile Device Enkhbat Davaasuren and Jiro Tanaka 1-1-1 Tennodai, Tsukuba, Ibaraki 305-8577 Japan {enkhee,jiro}@iplab.cs.tsukuba.ac.jp Abstract.
SMART TEXTILES FOR WEARABLE MOTION CAPTURE SYSTEMS
 AUTEX Research Journal, Vol. 2, No4, December 2002 AUTEX SMART TEXTILES FOR WEARABLE MOTION CAPTURE SYSTEMS A. Mazzoldi*, D. De Rossi*, F. Lorussi*, E. P. Scilingo*, R. Paradiso^ *Centro E. Piaggio, Faculty
AUTEX Research Journal, Vol. 2, No4, December 2002 AUTEX SMART TEXTILES FOR WEARABLE MOTION CAPTURE SYSTEMS A. Mazzoldi*, D. De Rossi*, F. Lorussi*, E. P. Scilingo*, R. Paradiso^ *Centro E. Piaggio, Faculty
2B34 DEVELOPMENT OF A HYDRAULIC PARALLEL LINK TYPE OF FORCE DISPLAY
 2B34 DEVELOPMENT OF A HYDRAULIC PARALLEL LINK TYPE OF FORCE DISPLAY -Improvement of Manipulability Using Disturbance Observer and its Application to a Master-slave System- Shigeki KUDOMI*, Hironao YAMADA**
2B34 DEVELOPMENT OF A HYDRAULIC PARALLEL LINK TYPE OF FORCE DISPLAY -Improvement of Manipulability Using Disturbance Observer and its Application to a Master-slave System- Shigeki KUDOMI*, Hironao YAMADA**
these systems has increased, regardless of the environmental conditions of the systems.
 Some Student November 30, 2010 CS 5317 USING A TACTILE GLOVE FOR MAINTENANCE TASKS IN HAZARDOUS OR REMOTE SITUATIONS 1. INTRODUCTION As our dependence on automated systems has increased, demand for maintenance
Some Student November 30, 2010 CS 5317 USING A TACTILE GLOVE FOR MAINTENANCE TASKS IN HAZARDOUS OR REMOTE SITUATIONS 1. INTRODUCTION As our dependence on automated systems has increased, demand for maintenance
On-Line Interactive Dexterous Grasping
 On-Line Interactive Dexterous Grasping Matei T. Ciocarlie and Peter K. Allen Columbia University, New York, USA {cmatei,allen}@columbia.edu Abstract. In this paper we describe a system that combines human
On-Line Interactive Dexterous Grasping Matei T. Ciocarlie and Peter K. Allen Columbia University, New York, USA {cmatei,allen}@columbia.edu Abstract. In this paper we describe a system that combines human
Title: A Comparison of Different Tactile Output Devices In An Aviation Application
 Page 1 of 6; 12/2/08 Thesis Proposal Title: A Comparison of Different Tactile Output Devices In An Aviation Application Student: Sharath Kanakamedala Advisor: Christopher G. Prince Proposal: (1) Provide
Page 1 of 6; 12/2/08 Thesis Proposal Title: A Comparison of Different Tactile Output Devices In An Aviation Application Student: Sharath Kanakamedala Advisor: Christopher G. Prince Proposal: (1) Provide
Benefits of using haptic devices in textile architecture
 28 September 2 October 2009, Universidad Politecnica de Valencia, Spain Alberto DOMINGO and Carlos LAZARO (eds.) Benefits of using haptic devices in textile architecture Javier SANCHEZ *, Joan SAVALL a
28 September 2 October 2009, Universidad Politecnica de Valencia, Spain Alberto DOMINGO and Carlos LAZARO (eds.) Benefits of using haptic devices in textile architecture Javier SANCHEZ *, Joan SAVALL a
Rendering Moving Tactile Stroke on the Palm Using a Sparse 2D Array
 Rendering Moving Tactile Stroke on the Palm Using a Sparse 2D Array Jaeyoung Park 1(&), Jaeha Kim 1, Yonghwan Oh 1, and Hong Z. Tan 2 1 Korea Institute of Science and Technology, Seoul, Korea {jypcubic,lithium81,oyh}@kist.re.kr
Rendering Moving Tactile Stroke on the Palm Using a Sparse 2D Array Jaeyoung Park 1(&), Jaeha Kim 1, Yonghwan Oh 1, and Hong Z. Tan 2 1 Korea Institute of Science and Technology, Seoul, Korea {jypcubic,lithium81,oyh}@kist.re.kr
Available theses in industrial robotics (October 2016) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin
 Prof. Paolo Rocco Prof. Andrea Maria Zanchettin") Available theses in industrial robotics (October 2016) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Politecnico di Milano - Dipartimento di Elettronica, Informazione e Bioingegneria Industrial robotics
Available theses in industrial robotics (October 2016) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Politecnico di Milano - Dipartimento di Elettronica, Informazione e Bioingegneria Industrial robotics
Humanoid Hands. CHENG Gang Dec Rollin Justin Robot.mp4
 Humanoid Hands CHENG Gang Dec. 2009 Rollin Justin Robot.mp4 Behind the Video Motivation of humanoid hand Serve the people whatever difficult Behind the Video Challenge to humanoid hand Dynamics How to
Humanoid Hands CHENG Gang Dec. 2009 Rollin Justin Robot.mp4 Behind the Video Motivation of humanoid hand Serve the people whatever difficult Behind the Video Challenge to humanoid hand Dynamics How to
Proprioception & force sensing
 Proprioception & force sensing Roope Raisamo Tampere Unit for Computer-Human Interaction (TAUCHI) School of Information Sciences University of Tampere, Finland Based on material by Jussi Rantala, Jukka
Proprioception & force sensing Roope Raisamo Tampere Unit for Computer-Human Interaction (TAUCHI) School of Information Sciences University of Tampere, Finland Based on material by Jussi Rantala, Jukka
LUCS Haptic Hand I. Abstract. 1 Introduction. Magnus Johnsson. Dept. of Computer Science and Lund University Cognitive Science Lund University, Sweden
 Magnus Johnsson (25). LUCS Haptic Hand I. LUCS Minor, 8. LUCS Haptic Hand I Magnus Johnsson Dept. of Computer Science and Lund University Cognitive Science Lund University, Sweden Abstract This paper describes
Magnus Johnsson (25). LUCS Haptic Hand I. LUCS Minor, 8. LUCS Haptic Hand I Magnus Johnsson Dept. of Computer Science and Lund University Cognitive Science Lund University, Sweden Abstract This paper describes
LASER ASSISTED COMBINED TELEOPERATION AND AUTONOMOUS CONTROL
 ANS EPRRSD - 13 th Robotics & remote Systems for Hazardous Environments 11 th Emergency Preparedness & Response Knoxville, TN, August 7-10, 2011, on CD-ROM, American Nuclear Society, LaGrange Park, IL
ANS EPRRSD - 13 th Robotics & remote Systems for Hazardous Environments 11 th Emergency Preparedness & Response Knoxville, TN, August 7-10, 2011, on CD-ROM, American Nuclear Society, LaGrange Park, IL
ROBOTIC MANIPULATION AND HAPTIC FEEDBACK VIA HIGH SPEED MESSAGING WITH THE JOINT ARCHITECTURE FOR UNMANNED SYSTEMS (JAUS)
") ROBOTIC MANIPULATION AND HAPTIC FEEDBACK VIA HIGH SPEED MESSAGING WITH THE JOINT ARCHITECTURE FOR UNMANNED SYSTEMS (JAUS) Dr. Daniel Kent, * Dr. Thomas Galluzzo*, Dr. Paul Bosscher and William Bowman INTRODUCTION
ROBOTIC MANIPULATION AND HAPTIC FEEDBACK VIA HIGH SPEED MESSAGING WITH THE JOINT ARCHITECTURE FOR UNMANNED SYSTEMS (JAUS) Dr. Daniel Kent, * Dr. Thomas Galluzzo*, Dr. Paul Bosscher and William Bowman INTRODUCTION
THE INNOVATION COMPANY ROBOTICS. Institute for Robotics and Mechatronics
 THE INNOVATION COMPANY ROBOTICS Institute for Robotics and Mechatronics The fields in which we research and their associated infrastructure enable us to carry out pioneering research work and provide solutions
THE INNOVATION COMPANY ROBOTICS Institute for Robotics and Mechatronics The fields in which we research and their associated infrastructure enable us to carry out pioneering research work and provide solutions
Thresholds for Dynamic Changes in a Rotary Switch
 Proceedings of EuroHaptics 2003, Dublin, Ireland, pp. 343-350, July 6-9, 2003. Thresholds for Dynamic Changes in a Rotary Switch Shuo Yang 1, Hong Z. Tan 1, Pietro Buttolo 2, Matthew Johnston 2, and Zygmunt
Proceedings of EuroHaptics 2003, Dublin, Ireland, pp. 343-350, July 6-9, 2003. Thresholds for Dynamic Changes in a Rotary Switch Shuo Yang 1, Hong Z. Tan 1, Pietro Buttolo 2, Matthew Johnston 2, and Zygmunt
MECHANICAL DESIGN LEARNING ENVIRONMENTS BASED ON VIRTUAL REALITY TECHNOLOGIES
 INTERNATIONAL CONFERENCE ON ENGINEERING AND PRODUCT DESIGN EDUCATION 4 & 5 SEPTEMBER 2008, UNIVERSITAT POLITECNICA DE CATALUNYA, BARCELONA, SPAIN MECHANICAL DESIGN LEARNING ENVIRONMENTS BASED ON VIRTUAL
INTERNATIONAL CONFERENCE ON ENGINEERING AND PRODUCT DESIGN EDUCATION 4 & 5 SEPTEMBER 2008, UNIVERSITAT POLITECNICA DE CATALUNYA, BARCELONA, SPAIN MECHANICAL DESIGN LEARNING ENVIRONMENTS BASED ON VIRTUAL
Information and Program
 Robotics 1 Information and Program Prof. Alessandro De Luca Robotics 1 1 Robotics 1 2017/18! First semester (12 weeks)! Monday, October 2, 2017 Monday, December 18, 2017! Courses of study (with this course
Robotics 1 Information and Program Prof. Alessandro De Luca Robotics 1 1 Robotics 1 2017/18! First semester (12 weeks)! Monday, October 2, 2017 Monday, December 18, 2017! Courses of study (with this course
Tele-operation of a robot arm with electro tactile feedback
 University of Wollongong Research Online Faculty of Engineering and Information Sciences - Papers: Part A Faculty of Engineering and Information Sciences 2013 Tele-operation of a robot arm with electro
University of Wollongong Research Online Faculty of Engineering and Information Sciences - Papers: Part A Faculty of Engineering and Information Sciences 2013 Tele-operation of a robot arm with electro
FP7 ICT Call 6: Cognitive Systems and Robotics
 FP7 ICT Call 6: Cognitive Systems and Robotics Information day Luxembourg, January 14, 2010 Libor Král, Head of Unit Unit E5 - Cognitive Systems, Interaction, Robotics DG Information Society and Media
FP7 ICT Call 6: Cognitive Systems and Robotics Information day Luxembourg, January 14, 2010 Libor Král, Head of Unit Unit E5 - Cognitive Systems, Interaction, Robotics DG Information Society and Media