Computer Haptics and Applications
|
|
|
- Grant Randolf Hicks
- 6 years ago
- Views:
Transcription
1 Computer Haptics and Applications EURON Summer School 2003 Cagatay Basdogan, Ph.D. College of Engineering Koc University, Istanbul, (
2 Resources: EURON Summer School 2003 Introduction: Basdogan C. and Srinivasan, M.A., Haptic Rendering in Virtual Environments, pp , Handbook of Virtual Reality (available at Historical Perspective: Proceedings of Phantom Users Group Workshops (available as MIT AI/RLE Tech. Reports) Conferences: IEEE Haptics Symposium (part of IEEE VR) (used to be a part of ASME Dynamic Systems and Control) EuroHaptics Siggraph IEEE Int. Conf. on Robotics and Automation Journals: Haptics-e Journal (free access), Presence: Virtual Environments and Teleoperators, IEEE Robotics and Automation, International Journal of Robotics, ASME Dynamic Systems and Control
3 Outline Part I. Fundamentals what is computer haptics? Part II. Applications/Experimental Studies where to use it? a. Surgical simulation b. Shared Virtual Environments c. Human Perception and Cognition d. Haptic Visualization: Tangible Models of Martian Rocks
4 Multi-Modal Virtual Environments: a synthetic environment that is designed to simulate our sensory communication with outside world. vision touch Applications: smell sound balance taste heat/cold/wind Education Art & Entertainment Medicine Space Technology CAD / CAM
5 The Power of Touch: EURON Summer School 2003 A little evidence can tell the whole story!
6 Haptic (adj.): related to the sense of touch. Computer Graphics: display of synthetically generated 2D/3D visual stimuli to the user Computer Haptics: display of synthetically generated 2D/3D haptic stimuli to the user F simulated haptic probe Haptic Interface: device for touch interactions in real and virtual worlds


7 Human Haptics Machine Haptics Human vs Machine Haptics: EURON Summer School 2003
8 Human Haptics Game: EURON Summer School What is the smallest separation distance between two points that can be discriminated by a human finger? (a) 5 mm (b) 1.5 mm (c) 0.1 mm 2. On a smooth surface, what is the height of a smallest size dot that can be detected by a human finger? (a) 1 mm (b) 0.1 mm (c) 2 micron 3. What is the maximum force that you can exert with your pointer finger? (a) 10 N (b) 50 N (c) 120 N 4. If you pinch a person, approximately how much force do you apply on him/her? (a) N (b) N (c) 5-20 N



9 Machine Haptics: EURON Summer School 2003 Types of Haptic Devices Net Force Displays Tactile Displays


10 Types of Haptic Devices Passive Active Force keyboard, trackball, mice, etc.



11 Types of Haptic Devices Grounded Ungrounded combined



12 Applications EURON Summer School 2003 Haptic Feedback for Molecular Simulation force molecule Haptic Display Visual Display nano structure Haptic Feedback for Medical Simulation and Training





13 Applications Haptic Feedback for Collaborative Engineering Design EURON Summer School 2003 Haptic Visualization haptic display collected data tangible data Tangible Interfaces buttons dials slider bars folders layers force fields Haptic User Interface (HUI) Simulation of repair and maintenance tasks Haptic Feedback for Crew Training
14 Integration of Vision and Touch Haptic Thread Shared Database Visual Thread Haptic Interface Visual Interface HUMAN OPERATOR DISPLAY FORCE STATE DISPLAY VISUALS STATE Motor Torques ~1 khz Encoder Positions Images ~ 30 Hz
15 Haptic Rendering with a Force Display Position Orientation Collision Detection Object Database Contact Information Geometry Force Torque Collision Response Material

16 Types of Haptic Interactions with 3D Objects: a b c d Force Force Torque Force Torque Point-Object Line Segment-Object Object-Object more computation
17 Point-Based Haptic Interaction EURON Summer School 2003 get_position (Vector &position); YOUR CODE COMES HERE - collision detection - collision response F IHIP HIP send_force (Vector force); F = k x
18 Point-Based Haptic Interaction EURON Summer School 2003 F k 2 How to pick the right k value? k 1 x Large k -> vibration Small k -> soft wall wall
19 Haptic Rendering Of 3D Geometric Primitives distance HIP F Hand void calculate_force (Vector &force) { float X, Y, Z, distance; float R = 20.0; X = HIP[0]; Y = HIP[1]; Z = HIP[2]; distance = sqrt(x*x + Y*Y + Z*Z); R if(distance < R) //collision check { force[0] = X/distance * (R-distance); force[1] = Y/distance * (R-distance); force[2] = Z/distance * (R-distance); } }
20 Haptic Rendering of 3D Polyhedron F = k x x HIP IHIP 3D Primitives no problem!? 3D polyhedron - optimization - rule-based techniques

21 Representation of 3D Polyhedron DBase SoSeparator SoCoordinate3 SoIndexedFaceSet Polygon Edge Vertex Neighbors Edge Vertex X Y Z Open Inventor/VRML file
22 1) Bounding-box hierarchy EURON Summer School 2003 Key Components of the Rendering Algorithm Box I Box II F 1 F 2 Box III Box IV F 3 3) Local coherence 2) Contact history
23 Haptic Rendering of Polygonal Surfaces HIP t-1 HIP t-2 HIP t-3 IHIP t IHIP t+1 IHIP t+2 v 2 v 1 d d v 3 HIP t HIP t+1 HIP t+2
24 Haptic Display of Surface Details Haptic smoothing of object surfaces Rendering of haptic textures Haptic rendering of surfaces with friction Direction of movement F user F t F n F f
25 Force Shading: Haptic Smoothing N 1 N 2 A 3 A 1 A 2 N 3 N s 3 = i 3 i A i. N A i i



26 image-based s EURON Summer School 2003 Haptic Texturing procedural t h(x,y,z)
27 Haptic Texturing M = N h + ( h. N) N h ˆ h i h ˆ = + j + h kˆ x y z texture M N h

28 Visual-Haptic Illusion Direction of movement N a N d N a N d
29 Part II. Applications/Experimental Studies: a. Surgical Simulation b. Shared Virtual Environments c. Human Perception and Cognition d. Visualization


30 I. Simulation of Laparoscopic Procedures Computer Display Laparoscopic Instruments Mannequin Force Feedback Device II Force Feedback Device I

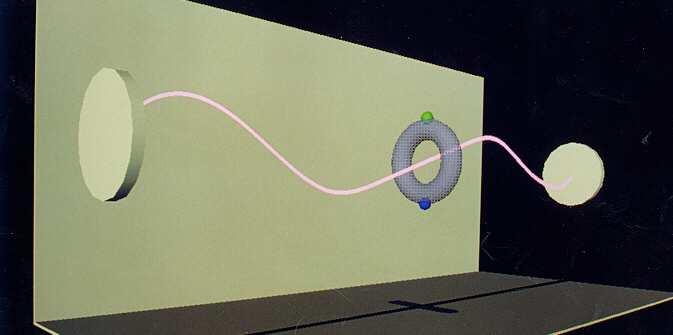
31 II. Shared Virtual Environments:
32 Experimental Protocol Conditions: Condition I: visual and haptic feedback together Condition II: visual feedback only Order: Group I Condition I, Condition II Group II Condition II, Condition I Number of Trials: Subjects repeated the experiment at least 10 times for each condition
33 Performance Measure Group II No Haptic Feedback Group II With Haptic Feedback Group I With Haptic Feedback Group I No Haptic Feedback Subjective Measure
34 Some Observations EURON Summer School 2003 Social aspects seem to play an important role in SVEs. Some of the subjects did not want to meet with their remote partner because they felt that they did not perform well and did not want to get embarrassed. One subject indicated that the red color generated a stress on him. Haptic feedback may be useful in understanding the (1) emotional feelings and (2) personality characteristics of a remote partner in SVEs. Most of the subjects associated force feedback + expert behavior with male gender, power, self-confidence, and aggressiveness. When there was no feedback, they were less sure, but they thought that they were playing with a patient female. Vibratory feedback may be helpful as a way of communication in SVEs. One subject opted to shake the ring to inform/warn his partner of an error. Some subjects emphasized the lack of verbal communication and visual depth cues, especially when there is only visual feedback provided to them. Most subjects felt that they were playing with another human being instead of a computer, especially when there is a force feedback, though they did not know why they felt that way. Some reported the quick response of the remote partner and the realness of the negotiations that took place with the remote partner.
35 III. Human Perception and Cognitive Performance F 1 F 2 d 1 d 2 Percent Correct Response (%) S-S F 1 < F 2 d 1 > d Degree of Visual Conflict
36 Stiffness Difference = 100% %Response the Variable Button perceived Softer Percent Correct Response (%) S-S R-F Haptic Only S-S Degree of Visual Conflict Stiffness Increment for the Variable Button (%)
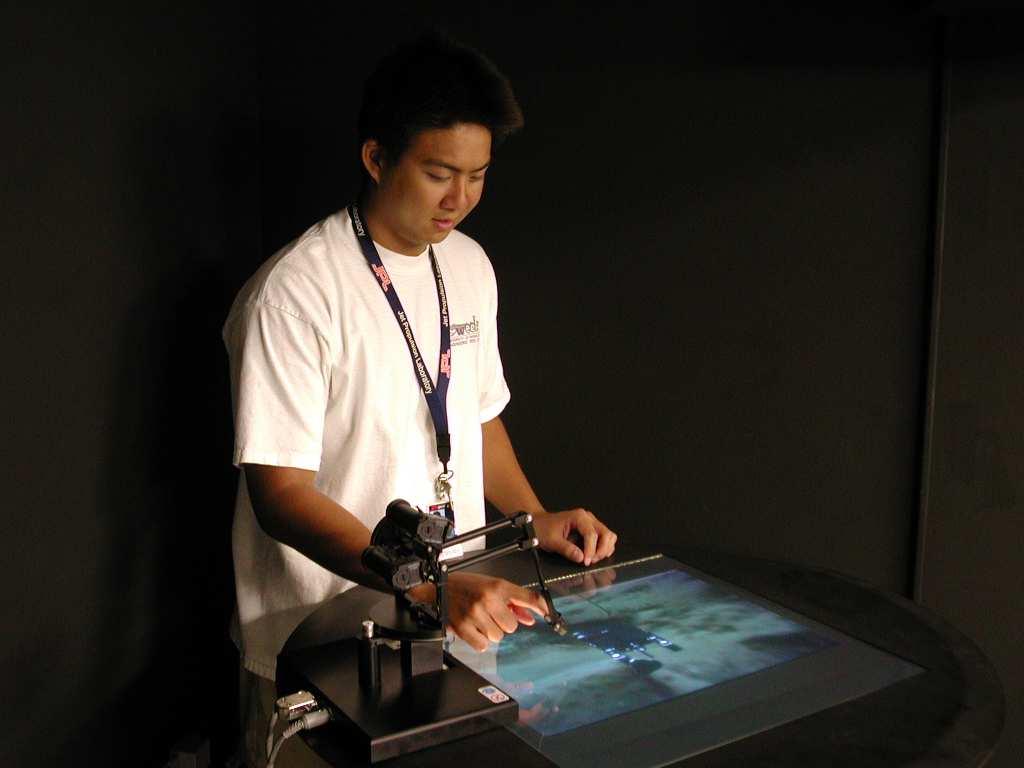
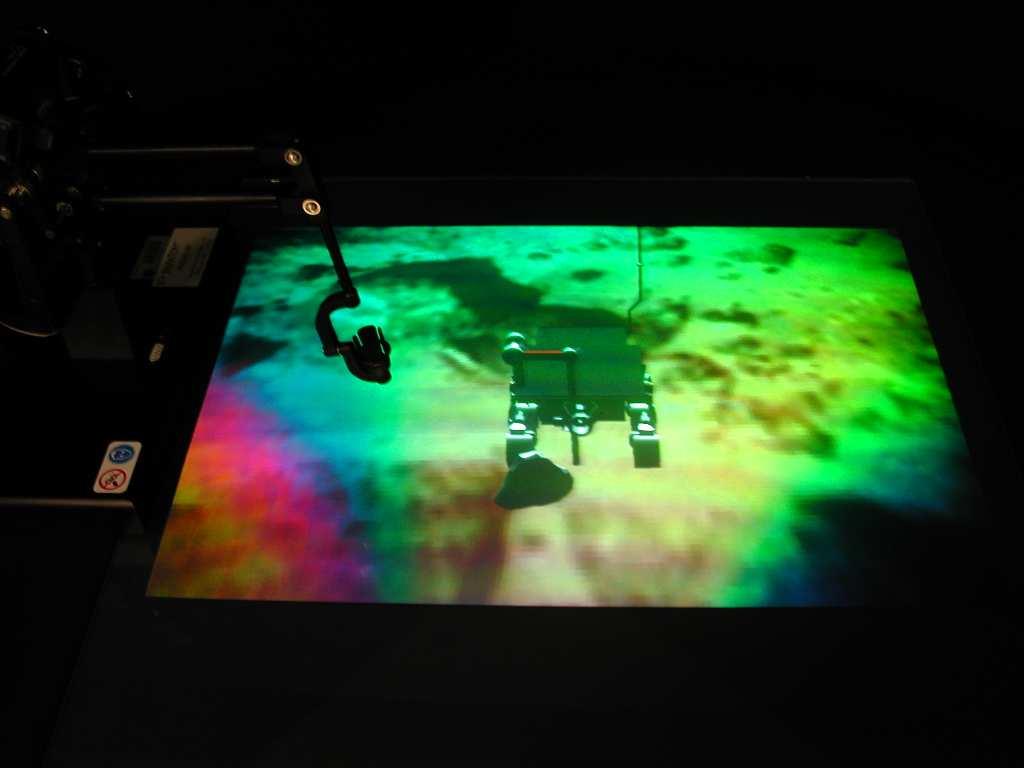
37 IV. Haptic Visualization of Martian Rocks
Haptic interaction. Ruth Aylett
 Haptic interaction Ruth Aylett Contents Haptic definition Haptic model Haptic devices Measuring forces Haptic Technologies Haptics refers to manual interactions with environments, such as sensorial exploration
Haptic interaction Ruth Aylett Contents Haptic definition Haptic model Haptic devices Measuring forces Haptic Technologies Haptics refers to manual interactions with environments, such as sensorial exploration
Haptic interaction. Ruth Aylett
 Haptic interaction Ruth Aylett Contents Haptic definition Haptic model Haptic devices Measuring forces Haptic Technologies Haptics refers to manual interactions with environments, such as sensorial exploration
Haptic interaction Ruth Aylett Contents Haptic definition Haptic model Haptic devices Measuring forces Haptic Technologies Haptics refers to manual interactions with environments, such as sensorial exploration
Discrimination of Virtual Haptic Textures Rendered with Different Update Rates
 Discrimination of Virtual Haptic Textures Rendered with Different Update Rates Seungmoon Choi and Hong Z. Tan Haptic Interface Research Laboratory Purdue University 465 Northwestern Avenue West Lafayette,
Discrimination of Virtual Haptic Textures Rendered with Different Update Rates Seungmoon Choi and Hong Z. Tan Haptic Interface Research Laboratory Purdue University 465 Northwestern Avenue West Lafayette,
Phantom-Based Haptic Interaction
 Phantom-Based Haptic Interaction Aimee Potts University of Minnesota, Morris 801 Nevada Ave. Apt. 7 Morris, MN 56267 (320) 589-0170 pottsal@cda.mrs.umn.edu ABSTRACT Haptic interaction is a new field of
Phantom-Based Haptic Interaction Aimee Potts University of Minnesota, Morris 801 Nevada Ave. Apt. 7 Morris, MN 56267 (320) 589-0170 pottsal@cda.mrs.umn.edu ABSTRACT Haptic interaction is a new field of
PROPRIOCEPTION AND FORCE FEEDBACK
 PROPRIOCEPTION AND FORCE FEEDBACK Roope Raisamo and Jukka Raisamo Multimodal Interaction Research Group Tampere Unit for Computer Human Interaction Department of Computer Sciences University of Tampere,
PROPRIOCEPTION AND FORCE FEEDBACK Roope Raisamo and Jukka Raisamo Multimodal Interaction Research Group Tampere Unit for Computer Human Interaction Department of Computer Sciences University of Tampere,
2. Introduction to Computer Haptics
 2. Introduction to Computer Haptics Seungmoon Choi, Ph.D. Assistant Professor Dept. of Computer Science and Engineering POSTECH Outline Basics of Force-Feedback Haptic Interfaces Introduction to Computer
2. Introduction to Computer Haptics Seungmoon Choi, Ph.D. Assistant Professor Dept. of Computer Science and Engineering POSTECH Outline Basics of Force-Feedback Haptic Interfaces Introduction to Computer
CS277 - Experimental Haptics Lecture 1. Introduction to Haptics
 CS277 - Experimental Haptics Lecture 1 Introduction to Haptics Haptic Interfaces Enables physical interaction with virtual objects Haptic Rendering Potential Fields Polygonal Meshes Implicit Surfaces Volumetric
CS277 - Experimental Haptics Lecture 1 Introduction to Haptics Haptic Interfaces Enables physical interaction with virtual objects Haptic Rendering Potential Fields Polygonal Meshes Implicit Surfaces Volumetric
Haptics CS327A
 Haptics CS327A - 217 hap tic adjective relating to the sense of touch or to the perception and manipulation of objects using the senses of touch and proprioception 1 2 Slave Master 3 Courtesy of Walischmiller
Haptics CS327A - 217 hap tic adjective relating to the sense of touch or to the perception and manipulation of objects using the senses of touch and proprioception 1 2 Slave Master 3 Courtesy of Walischmiller
Benefits of using haptic devices in textile architecture
 28 September 2 October 2009, Universidad Politecnica de Valencia, Spain Alberto DOMINGO and Carlos LAZARO (eds.) Benefits of using haptic devices in textile architecture Javier SANCHEZ *, Joan SAVALL a
28 September 2 October 2009, Universidad Politecnica de Valencia, Spain Alberto DOMINGO and Carlos LAZARO (eds.) Benefits of using haptic devices in textile architecture Javier SANCHEZ *, Joan SAVALL a
FORCE FEEDBACK. Roope Raisamo
 FORCE FEEDBACK Roope Raisamo Multimodal Interaction Research Group Tampere Unit for Computer Human Interaction Department of Computer Sciences University of Tampere, Finland Outline Force feedback interfaces
FORCE FEEDBACK Roope Raisamo Multimodal Interaction Research Group Tampere Unit for Computer Human Interaction Department of Computer Sciences University of Tampere, Finland Outline Force feedback interfaces
A Movement Based Method for Haptic Interaction
 Spring 2014 Haptics Class Project Paper presented at the University of South Florida, April 30, 2014 A Movement Based Method for Haptic Interaction Matthew Clevenger Abstract An abundance of haptic rendering
Spring 2014 Haptics Class Project Paper presented at the University of South Florida, April 30, 2014 A Movement Based Method for Haptic Interaction Matthew Clevenger Abstract An abundance of haptic rendering
Visual - Haptic Interactions in Multimodal Virtual Environments
 Visual - Haptic Interactions in Multimodal Virtual Environments by Wan-Chen Wu B.S., Mechanical Engineering National Taiwan University, 1996 Submitted to the Department of Mechanical Engineering in partial
Visual - Haptic Interactions in Multimodal Virtual Environments by Wan-Chen Wu B.S., Mechanical Engineering National Taiwan University, 1996 Submitted to the Department of Mechanical Engineering in partial
Development Scheme of JewelSense: Haptic-based Sculpting Tool for Jewelry Design
 Development Scheme of JewelSense: Haptic-based Sculpting Tool for Jewelry Design S. Wannarumon Kielarova Department of Industrial Engineering, Naresuan University, Phitsanulok 65000 * Corresponding Author
Development Scheme of JewelSense: Haptic-based Sculpting Tool for Jewelry Design S. Wannarumon Kielarova Department of Industrial Engineering, Naresuan University, Phitsanulok 65000 * Corresponding Author
Chapter 2 Introduction to Haptics 2.1 Definition of Haptics
 Chapter 2 Introduction to Haptics 2.1 Definition of Haptics The word haptic originates from the Greek verb hapto to touch and therefore refers to the ability to touch and manipulate objects. The haptic
Chapter 2 Introduction to Haptics 2.1 Definition of Haptics The word haptic originates from the Greek verb hapto to touch and therefore refers to the ability to touch and manipulate objects. The haptic
R (2) Controlling System Application with hands by identifying movements through Camera
 Controlling System Application with hands by identifying movements through Camera") R (2) N (5) Oral (3) Total (10) Dated Sign Assignment Group: C Problem Definition: Controlling System Application with hands by identifying movements through Camera Prerequisite: 1. Web Cam Connectivity
R (2) N (5) Oral (3) Total (10) Dated Sign Assignment Group: C Problem Definition: Controlling System Application with hands by identifying movements through Camera Prerequisite: 1. Web Cam Connectivity
Comparison of Human Haptic Size Discrimination Performance in Simulated Environments with Varying Levels of Force and Stiffness
 Comparison of Human Haptic Size Discrimination Performance in Simulated Environments with Varying Levels of Force and Stiffness Gina Upperman, Atsushi Suzuki, and Marcia O Malley Mechanical Engineering
Comparison of Human Haptic Size Discrimination Performance in Simulated Environments with Varying Levels of Force and Stiffness Gina Upperman, Atsushi Suzuki, and Marcia O Malley Mechanical Engineering
An Experimental Study on the Role of Touch in Shared Virtual Environments
 An Experimental Study on the Role of Touch in Shared Virtual Environments CAGATAY BASDOGAN, CHIH-HAO HO, MANDAYAM A. SRINIVASAN Laboratory for Human and Machine Haptics Massachusetts Institute of Technology,
An Experimental Study on the Role of Touch in Shared Virtual Environments CAGATAY BASDOGAN, CHIH-HAO HO, MANDAYAM A. SRINIVASAN Laboratory for Human and Machine Haptics Massachusetts Institute of Technology,
The Effect of Haptic Feedback on Basic Social Interaction within Shared Virtual Environments
 The Effect of Haptic Feedback on Basic Social Interaction within Shared Virtual Environments Elias Giannopoulos 1, Victor Eslava 2, María Oyarzabal 2, Teresa Hierro 2, Laura González 2, Manuel Ferre 2,
The Effect of Haptic Feedback on Basic Social Interaction within Shared Virtual Environments Elias Giannopoulos 1, Victor Eslava 2, María Oyarzabal 2, Teresa Hierro 2, Laura González 2, Manuel Ferre 2,
The Impact of Unaware Perception on Bodily Interaction in Virtual Reality. Environments. Marcos Hilsenrat, Miriam Reiner
 The Impact of Unaware Perception on Bodily Interaction in Virtual Reality Environments Marcos Hilsenrat, Miriam Reiner The Touchlab Technion Israel Institute of Technology Contact: marcos@tx.technion.ac.il
The Impact of Unaware Perception on Bodily Interaction in Virtual Reality Environments Marcos Hilsenrat, Miriam Reiner The Touchlab Technion Israel Institute of Technology Contact: marcos@tx.technion.ac.il
Peter Berkelman. ACHI/DigitalWorld
 Magnetic Levitation Haptic Peter Berkelman ACHI/DigitalWorld February 25, 2013 Outline: Haptics - Force Feedback Sample devices: Phantoms, Novint Falcon, Force Dimension Inertia, friction, hysteresis/backlash
Magnetic Levitation Haptic Peter Berkelman ACHI/DigitalWorld February 25, 2013 Outline: Haptics - Force Feedback Sample devices: Phantoms, Novint Falcon, Force Dimension Inertia, friction, hysteresis/backlash
Sound rendering in Interactive Multimodal Systems. Federico Avanzini
 Sound rendering in Interactive Multimodal Systems Federico Avanzini Background Outline Ecological Acoustics Multimodal perception Auditory visual rendering of egocentric distance Binaural sound Auditory
Sound rendering in Interactive Multimodal Systems Federico Avanzini Background Outline Ecological Acoustics Multimodal perception Auditory visual rendering of egocentric distance Binaural sound Auditory
Using Simple Force Feedback Mechanisms as Haptic Visualization Tools.
 Using Simple Force Feedback Mechanisms as Haptic Visualization Tools. Anders J Johansson, Joakim Linde Teiresias Research Group (www.bigfoot.com/~teiresias) Abstract Force feedback (FF) is a technology
Using Simple Force Feedback Mechanisms as Haptic Visualization Tools. Anders J Johansson, Joakim Linde Teiresias Research Group (www.bigfoot.com/~teiresias) Abstract Force feedback (FF) is a technology
Booklet of teaching units
 International Master Program in Mechatronic Systems for Rehabilitation Booklet of teaching units Third semester (M2 S1) Master Sciences de l Ingénieur Université Pierre et Marie Curie Paris 6 Boite 164,
International Master Program in Mechatronic Systems for Rehabilitation Booklet of teaching units Third semester (M2 S1) Master Sciences de l Ingénieur Université Pierre et Marie Curie Paris 6 Boite 164,
Overview of current developments in haptic APIs
 Central European Seminar on Computer Graphics for students, 2011 AUTHOR: Petr Kadleček SUPERVISOR: Petr Kmoch Overview of current developments in haptic APIs Presentation Haptics Haptic programming Haptic
Central European Seminar on Computer Graphics for students, 2011 AUTHOR: Petr Kadleček SUPERVISOR: Petr Kmoch Overview of current developments in haptic APIs Presentation Haptics Haptic programming Haptic
HAPTIC GUIDANCE BASED ON HARMONIC FUNCTIONS FOR THE EXECUTION OF TELEOPERATED ASSEMBLY TASKS. Carlos Vázquez Jan Rosell,1
 Preprints of IAD' 2007: IFAC WORKSHOP ON INTELLIGENT ASSEMBLY AND DISASSEMBLY May 23-25 2007, Alicante, Spain HAPTIC GUIDANCE BASED ON HARMONIC FUNCTIONS FOR THE EXECUTION OF TELEOPERATED ASSEMBLY TASKS
Preprints of IAD' 2007: IFAC WORKSHOP ON INTELLIGENT ASSEMBLY AND DISASSEMBLY May 23-25 2007, Alicante, Spain HAPTIC GUIDANCE BASED ON HARMONIC FUNCTIONS FOR THE EXECUTION OF TELEOPERATED ASSEMBLY TASKS
Evaluation of Haptic Virtual Fixtures in Psychomotor Skill Development for Robotic Surgical Training
 Department of Electronics, Information and Bioengineering Neuroengineering and medical robotics Lab Evaluation of Haptic Virtual Fixtures in Psychomotor Skill Development for Robotic Surgical Training
Department of Electronics, Information and Bioengineering Neuroengineering and medical robotics Lab Evaluation of Haptic Virtual Fixtures in Psychomotor Skill Development for Robotic Surgical Training
Using Haptics to Improve Immersion in Virtual Environments
 Using Haptics to Improve Immersion in Virtual Environments Priscilla Ramsamy, Adrian Haffegee, Ronan Jamieson, and Vassil Alexandrov Centre for Advanced Computing and Emerging Technologies, The University
Using Haptics to Improve Immersion in Virtual Environments Priscilla Ramsamy, Adrian Haffegee, Ronan Jamieson, and Vassil Alexandrov Centre for Advanced Computing and Emerging Technologies, The University
A Study of Perceptual Performance in Haptic Virtual Environments
 Paper: Rb18-4-2617; 2006/5/22 A Study of Perceptual Performance in Haptic Virtual Marcia K. O Malley, and Gina Upperman Mechanical Engineering and Materials Science, Rice University 6100 Main Street, MEMS
Paper: Rb18-4-2617; 2006/5/22 A Study of Perceptual Performance in Haptic Virtual Marcia K. O Malley, and Gina Upperman Mechanical Engineering and Materials Science, Rice University 6100 Main Street, MEMS
Haptic Rendering CPSC / Sonny Chan University of Calgary
 Haptic Rendering CPSC 599.86 / 601.86 Sonny Chan University of Calgary Today s Outline Announcements Human haptic perception Anatomy of a visual-haptic simulation Virtual wall and potential field rendering
Haptic Rendering CPSC 599.86 / 601.86 Sonny Chan University of Calgary Today s Outline Announcements Human haptic perception Anatomy of a visual-haptic simulation Virtual wall and potential field rendering
From Encoding Sound to Encoding Touch
 From Encoding Sound to Encoding Touch Toktam Mahmoodi King s College London, UK http://www.ctr.kcl.ac.uk/toktam/index.htm ETSI STQ Workshop, May 2017 Immersing a person into the real environment with Very
From Encoding Sound to Encoding Touch Toktam Mahmoodi King s College London, UK http://www.ctr.kcl.ac.uk/toktam/index.htm ETSI STQ Workshop, May 2017 Immersing a person into the real environment with Very
CS277 - Experimental Haptics Lecture 2. Haptic Rendering
 CS277 - Experimental Haptics Lecture 2 Haptic Rendering Outline Announcements Human haptic perception Anatomy of a visual-haptic simulation Virtual wall and potential field rendering A note on timing...
CS277 - Experimental Haptics Lecture 2 Haptic Rendering Outline Announcements Human haptic perception Anatomy of a visual-haptic simulation Virtual wall and potential field rendering A note on timing...
Perceptual Overlays for Teaching Advanced Driving Skills
 Perceptual Overlays for Teaching Advanced Driving Skills Brent Gillespie Micah Steele ARC Conference May 24, 2000 5/21/00 1 Outline 1. Haptics in the Driver-Vehicle Interface 2. Perceptual Overlays for
Perceptual Overlays for Teaching Advanced Driving Skills Brent Gillespie Micah Steele ARC Conference May 24, 2000 5/21/00 1 Outline 1. Haptics in the Driver-Vehicle Interface 2. Perceptual Overlays for
Beyond Visual: Shape, Haptics and Actuation in 3D UI
 Beyond Visual: Shape, Haptics and Actuation in 3D UI Ivan Poupyrev Welcome, Introduction, & Roadmap 3D UIs 101 3D UIs 201 User Studies and 3D UIs Guidelines for Developing 3D UIs Video Games: 3D UIs for
Beyond Visual: Shape, Haptics and Actuation in 3D UI Ivan Poupyrev Welcome, Introduction, & Roadmap 3D UIs 101 3D UIs 201 User Studies and 3D UIs Guidelines for Developing 3D UIs Video Games: 3D UIs for
Comparison of Haptic and Non-Speech Audio Feedback
 Comparison of Haptic and Non-Speech Audio Feedback Cagatay Goncu 1 and Kim Marriott 1 Monash University, Mebourne, Australia, cagatay.goncu@monash.edu, kim.marriott@monash.edu Abstract. We report a usability
Comparison of Haptic and Non-Speech Audio Feedback Cagatay Goncu 1 and Kim Marriott 1 Monash University, Mebourne, Australia, cagatay.goncu@monash.edu, kim.marriott@monash.edu Abstract. We report a usability
Applications of Haptics Technology in Advance Robotics
 Applications of Haptics Technology in Advance Robotics Vaibhav N. Fulkar vaibhav.fulkar@hotmail.com Mohit V. Shivramwar mohitshivramwar@gmail.com Anilesh A. Alkari anileshalkari123@gmail.com Abstract Haptic
Applications of Haptics Technology in Advance Robotics Vaibhav N. Fulkar vaibhav.fulkar@hotmail.com Mohit V. Shivramwar mohitshivramwar@gmail.com Anilesh A. Alkari anileshalkari123@gmail.com Abstract Haptic
Haptic Rendering and Volumetric Visualization with SenSitus
 Haptic Rendering and Volumetric Visualization with SenSitus Stefan Birmanns, Ph.D. Department of Molecular Biology The Scripps Research Institute 10550 N. Torrey Pines Road, Mail TPC6 La Jolla, California,
Haptic Rendering and Volumetric Visualization with SenSitus Stefan Birmanns, Ph.D. Department of Molecular Biology The Scripps Research Institute 10550 N. Torrey Pines Road, Mail TPC6 La Jolla, California,
VIRTUAL FIGURE PRESENTATION USING PRESSURE- SLIPPAGE-GENERATION TACTILE MOUSE
 VIRTUAL FIGURE PRESENTATION USING PRESSURE- SLIPPAGE-GENERATION TACTILE MOUSE Yiru Zhou 1, Xuecheng Yin 1, and Masahiro Ohka 1 1 Graduate School of Information Science, Nagoya University Email: ohka@is.nagoya-u.ac.jp
VIRTUAL FIGURE PRESENTATION USING PRESSURE- SLIPPAGE-GENERATION TACTILE MOUSE Yiru Zhou 1, Xuecheng Yin 1, and Masahiro Ohka 1 1 Graduate School of Information Science, Nagoya University Email: ohka@is.nagoya-u.ac.jp
Enhancing Robot Teleoperator Situation Awareness and Performance using Vibro-tactile and Graphical Feedback
 Enhancing Robot Teleoperator Situation Awareness and Performance using Vibro-tactile and Graphical Feedback by Paulo G. de Barros Robert W. Lindeman Matthew O. Ward Human Interaction in Vortual Environments
Enhancing Robot Teleoperator Situation Awareness and Performance using Vibro-tactile and Graphical Feedback by Paulo G. de Barros Robert W. Lindeman Matthew O. Ward Human Interaction in Vortual Environments
Technologies. Philippe Fuchs Ecole des Mines, ParisTech, Paris, France. Virtual Reality: Concepts and. Guillaume Moreau.
 Virtual Reality: Concepts and Technologies Editors Philippe Fuchs Ecole des Mines, ParisTech, Paris, France Guillaume Moreau Ecole Centrale de Nantes, CERMA, Nantes, France Pascal Guitton INRIA, University
Virtual Reality: Concepts and Technologies Editors Philippe Fuchs Ecole des Mines, ParisTech, Paris, France Guillaume Moreau Ecole Centrale de Nantes, CERMA, Nantes, France Pascal Guitton INRIA, University
¾ B-TECH (IT) ¾ B-TECH (IT)
 ¾ B-TECH (IT)") HAPTIC TECHNOLOGY V.R.Siddhartha Engineering College Vijayawada. Presented by Sudheer Kumar.S CH.Sreekanth ¾ B-TECH (IT) ¾ B-TECH (IT) Email:samudralasudheer@yahoo.com Email:shri_136@yahoo.co.in Introduction
HAPTIC TECHNOLOGY V.R.Siddhartha Engineering College Vijayawada. Presented by Sudheer Kumar.S CH.Sreekanth ¾ B-TECH (IT) ¾ B-TECH (IT) Email:samudralasudheer@yahoo.com Email:shri_136@yahoo.co.in Introduction
International Journal of Advanced Research in Computer Science and Software Engineering
 Volume 3, Issue 3, March 2013 ISSN: 2277 128X International Journal of Advanced Research in Computer Science and Software Engineering Research Paper Available online at: www.ijarcsse.com A Study on SensAble
Volume 3, Issue 3, March 2013 ISSN: 2277 128X International Journal of Advanced Research in Computer Science and Software Engineering Research Paper Available online at: www.ijarcsse.com A Study on SensAble
Human Factors. We take a closer look at the human factors that affect how people interact with computers and software:
 Human Factors We take a closer look at the human factors that affect how people interact with computers and software: Physiology physical make-up, capabilities Cognition thinking, reasoning, problem-solving,
Human Factors We take a closer look at the human factors that affect how people interact with computers and software: Physiology physical make-up, capabilities Cognition thinking, reasoning, problem-solving,
Haptic presentation of 3D objects in virtual reality for the visually disabled
 Haptic presentation of 3D objects in virtual reality for the visually disabled M Moranski, A Materka Institute of Electronics, Technical University of Lodz, Wolczanska 211/215, Lodz, POLAND marcin.moranski@p.lodz.pl,
Haptic presentation of 3D objects in virtual reality for the visually disabled M Moranski, A Materka Institute of Electronics, Technical University of Lodz, Wolczanska 211/215, Lodz, POLAND marcin.moranski@p.lodz.pl,
these systems has increased, regardless of the environmental conditions of the systems.
 Some Student November 30, 2010 CS 5317 USING A TACTILE GLOVE FOR MAINTENANCE TASKS IN HAZARDOUS OR REMOTE SITUATIONS 1. INTRODUCTION As our dependence on automated systems has increased, demand for maintenance
Some Student November 30, 2010 CS 5317 USING A TACTILE GLOVE FOR MAINTENANCE TASKS IN HAZARDOUS OR REMOTE SITUATIONS 1. INTRODUCTION As our dependence on automated systems has increased, demand for maintenance
MECHANICAL DESIGN LEARNING ENVIRONMENTS BASED ON VIRTUAL REALITY TECHNOLOGIES
 INTERNATIONAL CONFERENCE ON ENGINEERING AND PRODUCT DESIGN EDUCATION 4 & 5 SEPTEMBER 2008, UNIVERSITAT POLITECNICA DE CATALUNYA, BARCELONA, SPAIN MECHANICAL DESIGN LEARNING ENVIRONMENTS BASED ON VIRTUAL
INTERNATIONAL CONFERENCE ON ENGINEERING AND PRODUCT DESIGN EDUCATION 4 & 5 SEPTEMBER 2008, UNIVERSITAT POLITECNICA DE CATALUNYA, BARCELONA, SPAIN MECHANICAL DESIGN LEARNING ENVIRONMENTS BASED ON VIRTUAL
Haptic Technology- Comprehensive Review Study with its Applications
 Haptic Technology- Comprehensive Review Study with its Applications Tanya Jaiswal 1, Rambha Yadav 2, Pooja Kedia 3 1,2 Student, Department of Computer Science and Engineering, Buddha Institute of Technology,
Haptic Technology- Comprehensive Review Study with its Applications Tanya Jaiswal 1, Rambha Yadav 2, Pooja Kedia 3 1,2 Student, Department of Computer Science and Engineering, Buddha Institute of Technology,
Networked haptic cooperation using remote dynamic proxies
 29 Second International Conferences on Advances in Computer-Human Interactions Networked haptic cooperation using remote dynamic proxies Zhi Li Department of Mechanical Engineering University of Victoria
29 Second International Conferences on Advances in Computer-Human Interactions Networked haptic cooperation using remote dynamic proxies Zhi Li Department of Mechanical Engineering University of Victoria
Haptics and the User Interface
 Haptics and the User Interface based on slides from Karon MacLean, original slides available at: http://www.cs.ubc.ca/~maclean/publics/ what is haptic? from Greek haptesthai : to touch Haptic User Interfaces
Haptics and the User Interface based on slides from Karon MacLean, original slides available at: http://www.cs.ubc.ca/~maclean/publics/ what is haptic? from Greek haptesthai : to touch Haptic User Interfaces
TEACHING HAPTIC RENDERING SONNY CHAN, STANFORD UNIVERSITY
 TEACHING HAPTIC RENDERING SONNY CHAN, STANFORD UNIVERSITY MARCH 4, 2012 HAPTICS SYMPOSIUM Overview A brief introduction to CS 277 @ Stanford Core topics in haptic rendering Use of the CHAI3D framework
TEACHING HAPTIC RENDERING SONNY CHAN, STANFORD UNIVERSITY MARCH 4, 2012 HAPTICS SYMPOSIUM Overview A brief introduction to CS 277 @ Stanford Core topics in haptic rendering Use of the CHAI3D framework
Lecture 1: Introduction to haptics and Kinesthetic haptic devices
 ME 327: Design and Control of Haptic Systems Winter 2018 Lecture 1: Introduction to haptics and Kinesthetic haptic devices Allison M. Okamura Stanford University today s objectives introduce you to the
ME 327: Design and Control of Haptic Systems Winter 2018 Lecture 1: Introduction to haptics and Kinesthetic haptic devices Allison M. Okamura Stanford University today s objectives introduce you to the
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute Use an example to explain what is admittance control? You may refer to exoskeleton
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute Use an example to explain what is admittance control? You may refer to exoskeleton
Haplug: A Haptic Plug for Dynamic VR Interactions
 Haplug: A Haptic Plug for Dynamic VR Interactions Nobuhisa Hanamitsu *, Ali Israr Disney Research, USA nobuhisa.hanamitsu@disneyresearch.com Abstract. We demonstrate applications of a new actuator, the
Haplug: A Haptic Plug for Dynamic VR Interactions Nobuhisa Hanamitsu *, Ali Israr Disney Research, USA nobuhisa.hanamitsu@disneyresearch.com Abstract. We demonstrate applications of a new actuator, the
Multimodal Virtual Environments: MAGIC Toolkit and Visual-Haptic Interaction Paradigms. I-Chun Alexandra Hou
 Multimodal Virtual Environments: MAGIC Toolkit and Visual-Haptic Interaction Paradigms by I-Chun Alexandra Hou B.S., Mechanical Engineering (1995) Massachusetts Institute of Technology Submitted to the
Multimodal Virtual Environments: MAGIC Toolkit and Visual-Haptic Interaction Paradigms by I-Chun Alexandra Hou B.S., Mechanical Engineering (1995) Massachusetts Institute of Technology Submitted to the
VIEW: Visual Interactive Effective Worlds Lorentz Center International Center for workshops in the Sciences June Dr.
 Virtual Reality & Presence VIEW: Visual Interactive Effective Worlds Lorentz Center International Center for workshops in the Sciences 25-27 June 2007 Dr. Frederic Vexo Virtual Reality & Presence Outline:
Virtual Reality & Presence VIEW: Visual Interactive Effective Worlds Lorentz Center International Center for workshops in the Sciences 25-27 June 2007 Dr. Frederic Vexo Virtual Reality & Presence Outline:
Haptic Rendering: Introductory Concepts
 Rendering: Introductory Concepts Human operator Video and audio device Audio-visual rendering rendering Kenneth Salisbury and Francois Conti Stanford University Federico Barbagli Stanford University and
Rendering: Introductory Concepts Human operator Video and audio device Audio-visual rendering rendering Kenneth Salisbury and Francois Conti Stanford University Federico Barbagli Stanford University and
Rendering detailed haptic textures
 Workshop On Virtual Reality Interaction and Physical Simulation (2005) F. Ganovelli and C. Mendoza (Editors) Rendering detailed haptic textures Submission id: 45 Abstract Rendering haptic textures seamlessly
Workshop On Virtual Reality Interaction and Physical Simulation (2005) F. Ganovelli and C. Mendoza (Editors) Rendering detailed haptic textures Submission id: 45 Abstract Rendering haptic textures seamlessly
Learning to Detect Doorbell Buttons and Broken Ones on Portable Device by Haptic Exploration In An Unsupervised Way and Real-time.
 Learning to Detect Doorbell Buttons and Broken Ones on Portable Device by Haptic Exploration In An Unsupervised Way and Real-time Liping Wu April 21, 2011 Abstract The paper proposes a framework so that
Learning to Detect Doorbell Buttons and Broken Ones on Portable Device by Haptic Exploration In An Unsupervised Way and Real-time Liping Wu April 21, 2011 Abstract The paper proposes a framework so that
Interacting within Virtual Worlds (based on talks by Greg Welch and Mark Mine)
") Interacting within Virtual Worlds (based on talks by Greg Welch and Mark Mine) Presentation Working in a virtual world Interaction principles Interaction examples Why VR in the First Place? Direct perception
Interacting within Virtual Worlds (based on talks by Greg Welch and Mark Mine) Presentation Working in a virtual world Interaction principles Interaction examples Why VR in the First Place? Direct perception
College Park, MD 20742, USA virtual environments. To enable haptic rendering of large datasets we
 Continuously-Adaptive Haptic Rendering Jihad El-Sana 1 and Amitabh Varshney 2 1 Department of Computer Science, Ben-Gurion University, Beer-Sheva, 84105, Israel jihad@cs.bgu.ac.il 2 Department of Computer
Continuously-Adaptive Haptic Rendering Jihad El-Sana 1 and Amitabh Varshney 2 1 Department of Computer Science, Ben-Gurion University, Beer-Sheva, 84105, Israel jihad@cs.bgu.ac.il 2 Department of Computer
Touch Perception and Emotional Appraisal for a Virtual Agent
 Touch Perception and Emotional Appraisal for a Virtual Agent Nhung Nguyen, Ipke Wachsmuth, Stefan Kopp Faculty of Technology University of Bielefeld 33594 Bielefeld Germany {nnguyen, ipke, skopp}@techfak.uni-bielefeld.de
Touch Perception and Emotional Appraisal for a Virtual Agent Nhung Nguyen, Ipke Wachsmuth, Stefan Kopp Faculty of Technology University of Bielefeld 33594 Bielefeld Germany {nnguyen, ipke, skopp}@techfak.uni-bielefeld.de
Toward Principles for Visual Interaction Design for Communicating Weight by using Pseudo-Haptic Feedback
 Toward Principles for Visual Interaction Design for Communicating Weight by using Pseudo-Haptic Feedback Kumiyo Nakakoji Key Technology Laboratory SRA Inc. 2-32-8 Minami-Ikebukuro, Toshima, Tokyo, 171-8513,
Toward Principles for Visual Interaction Design for Communicating Weight by using Pseudo-Haptic Feedback Kumiyo Nakakoji Key Technology Laboratory SRA Inc. 2-32-8 Minami-Ikebukuro, Toshima, Tokyo, 171-8513,
VIRTUAL REALITY Introduction. Emil M. Petriu SITE, University of Ottawa
 VIRTUAL REALITY Introduction Emil M. Petriu SITE, University of Ottawa Natural and Virtual Reality Virtual Reality Interactive Virtual Reality Virtualized Reality Augmented Reality HUMAN PERCEPTION OF
VIRTUAL REALITY Introduction Emil M. Petriu SITE, University of Ottawa Natural and Virtual Reality Virtual Reality Interactive Virtual Reality Virtualized Reality Augmented Reality HUMAN PERCEPTION OF
Force feedback interfaces & applications
 Force feedback interfaces & applications Roope Raisamo Tampere Unit for Computer-Human Interaction (TAUCHI) School of Information Sciences University of Tampere, Finland Based on material by Jukka Raisamo,
Force feedback interfaces & applications Roope Raisamo Tampere Unit for Computer-Human Interaction (TAUCHI) School of Information Sciences University of Tampere, Finland Based on material by Jukka Raisamo,
RECENT advances in nanotechnology have enabled
 Haptics Enabled Offline AFM Image Analysis Bhatti A., Nahavandi S. and Hossny M. Abstract Current advancements in nanotechnology are dependent on the capabilities that can enable nano-scientists to extend
Haptics Enabled Offline AFM Image Analysis Bhatti A., Nahavandi S. and Hossny M. Abstract Current advancements in nanotechnology are dependent on the capabilities that can enable nano-scientists to extend
Development of K-Touch TM Haptic API for Various Datasets
 Development of K-Touch TM Haptic API for Various Datasets Beom-Chan Lee 1 Jong-Phil Kim 2 Jongeun Cha 3 Jeha Ryu 4 ABSTRACT This paper presents development of a new haptic API (Application Programming
Development of K-Touch TM Haptic API for Various Datasets Beom-Chan Lee 1 Jong-Phil Kim 2 Jongeun Cha 3 Jeha Ryu 4 ABSTRACT This paper presents development of a new haptic API (Application Programming
Force Feedback Mechatronics in Medecine, Healthcare and Rehabilitation
 Force Feedback Mechatronics in Medecine, Healthcare and Rehabilitation J.P. Friconneau 1, P. Garrec 1, F. Gosselin 1, A. Riwan 1, 1 CEA-LIST DTSI/SRSI, CEN/FAR BP6, 92265 Fontenay-aux-Roses, France jean-pierre.friconneau@cea.fr
Force Feedback Mechatronics in Medecine, Healthcare and Rehabilitation J.P. Friconneau 1, P. Garrec 1, F. Gosselin 1, A. Riwan 1, 1 CEA-LIST DTSI/SRSI, CEN/FAR BP6, 92265 Fontenay-aux-Roses, France jean-pierre.friconneau@cea.fr
Collaboration in Multimodal Virtual Environments
 Collaboration in Multimodal Virtual Environments Eva-Lotta Sallnäs NADA, Royal Institute of Technology evalotta@nada.kth.se http://www.nada.kth.se/~evalotta/ Research question How is collaboration in a
Collaboration in Multimodal Virtual Environments Eva-Lotta Sallnäs NADA, Royal Institute of Technology evalotta@nada.kth.se http://www.nada.kth.se/~evalotta/ Research question How is collaboration in a
Wearable Haptic Display to Present Gravity Sensation
 Wearable Haptic Display to Present Gravity Sensation Preliminary Observations and Device Design Kouta Minamizawa*, Hiroyuki Kajimoto, Naoki Kawakami*, Susumu, Tachi* (*) The University of Tokyo, Japan
Wearable Haptic Display to Present Gravity Sensation Preliminary Observations and Device Design Kouta Minamizawa*, Hiroyuki Kajimoto, Naoki Kawakami*, Susumu, Tachi* (*) The University of Tokyo, Japan
Haptic Display of Contact Location
 Haptic Display of Contact Location Katherine J. Kuchenbecker William R. Provancher Günter Niemeyer Mark R. Cutkosky Telerobotics Lab and Dexterous Manipulation Laboratory Stanford University, Stanford,
Haptic Display of Contact Location Katherine J. Kuchenbecker William R. Provancher Günter Niemeyer Mark R. Cutkosky Telerobotics Lab and Dexterous Manipulation Laboratory Stanford University, Stanford,
Differences in Fitts Law Task Performance Based on Environment Scaling
 Differences in Fitts Law Task Performance Based on Environment Scaling Gregory S. Lee and Bhavani Thuraisingham Department of Computer Science University of Texas at Dallas 800 West Campbell Road Richardson,
Differences in Fitts Law Task Performance Based on Environment Scaling Gregory S. Lee and Bhavani Thuraisingham Department of Computer Science University of Texas at Dallas 800 West Campbell Road Richardson,
Design and Evaluation of Tactile Number Reading Methods on Smartphones
 Design and Evaluation of Tactile Number Reading Methods on Smartphones Fan Zhang fanzhang@zjicm.edu.cn Shaowei Chu chu@zjicm.edu.cn Naye Ji jinaye@zjicm.edu.cn Ruifang Pan ruifangp@zjicm.edu.cn Abstract
Design and Evaluation of Tactile Number Reading Methods on Smartphones Fan Zhang fanzhang@zjicm.edu.cn Shaowei Chu chu@zjicm.edu.cn Naye Ji jinaye@zjicm.edu.cn Ruifang Pan ruifangp@zjicm.edu.cn Abstract
Haptic Data Transmission based on the Prediction and Compression
 Haptic Data Transmission based on the Prediction and Compression 375 19 X Haptic Data Transmission based on the Prediction and Compression Yonghee You and Mee Young Sung Department of Computer Science
Haptic Data Transmission based on the Prediction and Compression 375 19 X Haptic Data Transmission based on the Prediction and Compression Yonghee You and Mee Young Sung Department of Computer Science
Proprioception & force sensing
 Proprioception & force sensing Roope Raisamo Tampere Unit for Computer-Human Interaction (TAUCHI) School of Information Sciences University of Tampere, Finland Based on material by Jussi Rantala, Jukka
Proprioception & force sensing Roope Raisamo Tampere Unit for Computer-Human Interaction (TAUCHI) School of Information Sciences University of Tampere, Finland Based on material by Jussi Rantala, Jukka
Haptic Display of Multiple Scalar Fields on a Surface
 Haptic Display of Multiple Scalar Fields on a Surface Adam Seeger, Amy Henderson, Gabriele L. Pelli, Mark Hollins, Russell M. Taylor II Departments of Computer Science and Psychology University of North
Haptic Display of Multiple Scalar Fields on a Surface Adam Seeger, Amy Henderson, Gabriele L. Pelli, Mark Hollins, Russell M. Taylor II Departments of Computer Science and Psychology University of North
Haptic Technology: A Touch Revolution
 Haptic Technology: A Touch Revolution Er. Ifat Rasheed M.Tech, Department of Electronics and Communication Engineering, Lovely Professional University, Phagwara.(India) ABSTRACT Software engineering finds
Haptic Technology: A Touch Revolution Er. Ifat Rasheed M.Tech, Department of Electronics and Communication Engineering, Lovely Professional University, Phagwara.(India) ABSTRACT Software engineering finds
Tactile Actuators Using SMA Micro-wires and the Generation of Texture Sensation from Images
 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) November -,. Tokyo, Japan Tactile Actuators Using SMA Micro-wires and the Generation of Texture Sensation from Images Yuto Takeda
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) November -,. Tokyo, Japan Tactile Actuators Using SMA Micro-wires and the Generation of Texture Sensation from Images Yuto Takeda
Abdulmotaleb El Saddik Associate Professor Dr.-Ing., SMIEEE, P.Eng.
 Abdulmotaleb El Saddik Associate Professor Dr.-Ing., SMIEEE, P.Eng. Multimedia Communications Research Laboratory University of Ottawa Ontario Research Network of E-Commerce www.mcrlab.uottawa.ca abed@mcrlab.uottawa.ca
Abdulmotaleb El Saddik Associate Professor Dr.-Ing., SMIEEE, P.Eng. Multimedia Communications Research Laboratory University of Ottawa Ontario Research Network of E-Commerce www.mcrlab.uottawa.ca abed@mcrlab.uottawa.ca
Haptic Rendering: Introductory Concepts
 Haptic Rendering: Introductory Concepts Kenneth Salisbury, Federico Barbagli, Francois Conti Stanford Robotics Lab - Stanford University - Stanford, CA, U.S.A. Dipartimento di Inegneria dell Informazione
Haptic Rendering: Introductory Concepts Kenneth Salisbury, Federico Barbagli, Francois Conti Stanford Robotics Lab - Stanford University - Stanford, CA, U.S.A. Dipartimento di Inegneria dell Informazione
Designing Pseudo-Haptic Feedback Mechanisms for Communicating Weight in Decision Making Tasks
 Appeared in the Proceedings of Shikakeology: Designing Triggers for Behavior Change, AAAI Spring Symposium Series 2013 Technical Report SS-12-06, pp.107-112, Palo Alto, CA., March 2013. Designing Pseudo-Haptic
Appeared in the Proceedings of Shikakeology: Designing Triggers for Behavior Change, AAAI Spring Symposium Series 2013 Technical Report SS-12-06, pp.107-112, Palo Alto, CA., March 2013. Designing Pseudo-Haptic
A Perceptual Study on Haptic Rendering of Surface Topography when Both Surface Height and Stiffness Vary
 A Perceptual Study on Haptic Rendering of Surface Topography when Both Surface Height and Stiffness Vary Laron Walker and Hong Z. Tan Haptic Interface Research Laboratory Purdue University West Lafayette,
A Perceptual Study on Haptic Rendering of Surface Topography when Both Surface Height and Stiffness Vary Laron Walker and Hong Z. Tan Haptic Interface Research Laboratory Purdue University West Lafayette,
Evaluation of Visuo-haptic Feedback in a 3D Touch Panel Interface
 Evaluation of Visuo-haptic Feedback in a 3D Touch Panel Interface Xu Zhao Saitama University 255 Shimo-Okubo, Sakura-ku, Saitama City, Japan sheldonzhaox@is.ics.saitamau.ac.jp Takehiro Niikura The University
Evaluation of Visuo-haptic Feedback in a 3D Touch Panel Interface Xu Zhao Saitama University 255 Shimo-Okubo, Sakura-ku, Saitama City, Japan sheldonzhaox@is.ics.saitamau.ac.jp Takehiro Niikura The University
Multi-Rate Multi-Range Dynamic Simulation for Haptic Interaction
 Multi-Rate Multi-Range Dynamic Simulation for Haptic Interaction Ikumi Susa Makoto Sato Shoichi Hasegawa Tokyo Institute of Technology ABSTRACT In this paper, we propose a technique for a high quality
Multi-Rate Multi-Range Dynamic Simulation for Haptic Interaction Ikumi Susa Makoto Sato Shoichi Hasegawa Tokyo Institute of Technology ABSTRACT In this paper, we propose a technique for a high quality
Cutaneous Feedback of Fingertip Deformation and Vibration for Palpation in Robotic Surgery
 Cutaneous Feedback of Fingertip Deformation and Vibration for Palpation in Robotic Surgery Claudio Pacchierotti Domenico Prattichizzo Katherine J. Kuchenbecker Motivation Despite its expected clinical
Cutaneous Feedback of Fingertip Deformation and Vibration for Palpation in Robotic Surgery Claudio Pacchierotti Domenico Prattichizzo Katherine J. Kuchenbecker Motivation Despite its expected clinical
Medical Robotics. Part II: SURGICAL ROBOTICS
 5 Medical Robotics Part II: SURGICAL ROBOTICS In the last decade, surgery and robotics have reached a maturity that has allowed them to be safely assimilated to create a new kind of operating room. This
5 Medical Robotics Part II: SURGICAL ROBOTICS In the last decade, surgery and robotics have reached a maturity that has allowed them to be safely assimilated to create a new kind of operating room. This
Here I present more details about the methods of the experiments which are. described in the main text, and describe two additional examinations which
 Supplementary Note Here I present more details about the methods of the experiments which are described in the main text, and describe two additional examinations which assessed DF s proprioceptive performance
Supplementary Note Here I present more details about the methods of the experiments which are described in the main text, and describe two additional examinations which assessed DF s proprioceptive performance
Touch & Haptics. Touch & High Information Transfer Rate. Modern Haptics. Human. Haptics
 Touch & Haptics Touch & High Information Transfer Rate Blind and deaf people have been using touch to substitute vision or hearing for a very long time, and successfully. OPTACON Hong Z Tan Purdue University
Touch & Haptics Touch & High Information Transfer Rate Blind and deaf people have been using touch to substitute vision or hearing for a very long time, and successfully. OPTACON Hong Z Tan Purdue University
HAPTIC DEVICES FOR DESKTOP VIRTUAL PROTOTYPING APPLICATIONS
 The 3rd International Conference on Computational Mechanics and Virtual Engineering COMEC 2009 29 30 OCTOBER 2009, Brasov, Romania HAPTIC DEVICES FOR DESKTOP VIRTUAL PROTOTYPING APPLICATIONS A. Fratu 1,
The 3rd International Conference on Computational Mechanics and Virtual Engineering COMEC 2009 29 30 OCTOBER 2009, Brasov, Romania HAPTIC DEVICES FOR DESKTOP VIRTUAL PROTOTYPING APPLICATIONS A. Fratu 1,
Learning the Proprioceptive and Acoustic Properties of Household Objects. Jivko Sinapov Willow Collaborators: Kaijen and Radu 6/24/2010
 Learning the Proprioceptive and Acoustic Properties of Household Objects Jivko Sinapov Willow Collaborators: Kaijen and Radu 6/24/2010 What is Proprioception? It is the sense that indicates whether the
Learning the Proprioceptive and Acoustic Properties of Household Objects Jivko Sinapov Willow Collaborators: Kaijen and Radu 6/24/2010 What is Proprioception? It is the sense that indicates whether the
PERFORMANCE IN A HAPTIC ENVIRONMENT ABSTRACT
 PERFORMANCE IN A HAPTIC ENVIRONMENT Michael V. Doran,William Owen, and Brian Holbert University of South Alabama School of Computer and Information Sciences Mobile, Alabama 36688 (334) 460-6390 doran@cis.usouthal.edu,
PERFORMANCE IN A HAPTIC ENVIRONMENT Michael V. Doran,William Owen, and Brian Holbert University of South Alabama School of Computer and Information Sciences Mobile, Alabama 36688 (334) 460-6390 doran@cis.usouthal.edu,
The influence of changing haptic refresh-rate on subjective user experiences - lessons for effective touchbased applications.
 The influence of changing haptic refresh-rate on subjective user experiences - lessons for effective touchbased applications. Stuart Booth 1, Franco De Angelis 2 and Thore Schmidt-Tjarksen 3 1 University
The influence of changing haptic refresh-rate on subjective user experiences - lessons for effective touchbased applications. Stuart Booth 1, Franco De Angelis 2 and Thore Schmidt-Tjarksen 3 1 University
Haptic Identification of Stiffness and Force Magnitude
 Haptic Identification of Stiffness and Force Magnitude Steven A. Cholewiak, 1 Hong Z. Tan, 1 and David S. Ebert 2,3 1 Haptic Interface Research Laboratory 2 Purdue University Rendering and Perceptualization
Haptic Identification of Stiffness and Force Magnitude Steven A. Cholewiak, 1 Hong Z. Tan, 1 and David S. Ebert 2,3 1 Haptic Interface Research Laboratory 2 Purdue University Rendering and Perceptualization
Abstract. 1. Introduction
 GRAPHICAL AND HAPTIC INTERACTION WITH LARGE 3D COMPRESSED OBJECTS Krasimir Kolarov Interval Research Corp., 1801-C Page Mill Road, Palo Alto, CA 94304 Kolarov@interval.com Abstract The use of force feedback
GRAPHICAL AND HAPTIC INTERACTION WITH LARGE 3D COMPRESSED OBJECTS Krasimir Kolarov Interval Research Corp., 1801-C Page Mill Road, Palo Alto, CA 94304 Kolarov@interval.com Abstract The use of force feedback
Perception of Curvature and Object Motion Via Contact Location Feedback
 Perception of Curvature and Object Motion Via Contact Location Feedback William R. Provancher, Katherine J. Kuchenbecker, Günter Niemeyer, and Mark R. Cutkosky Stanford University Dexterous Manipulation
Perception of Curvature and Object Motion Via Contact Location Feedback William R. Provancher, Katherine J. Kuchenbecker, Günter Niemeyer, and Mark R. Cutkosky Stanford University Dexterous Manipulation
Precise manipulation of GUI on a touch screen with haptic cues
 Precise manipulation of GUI on a touch screen with haptic cues The MIT Faculty has made this article openly available. Please share how this access benefits you. Your story matters. Citation As Published
Precise manipulation of GUI on a touch screen with haptic cues The MIT Faculty has made this article openly available. Please share how this access benefits you. Your story matters. Citation As Published
Short Course on Computational Illumination
 Short Course on Computational Illumination University of Tampere August 9/10, 2012 Matthew Turk Computer Science Department and Media Arts and Technology Program University of California, Santa Barbara
Short Course on Computational Illumination University of Tampere August 9/10, 2012 Matthew Turk Computer Science Department and Media Arts and Technology Program University of California, Santa Barbara
Thresholds for Dynamic Changes in a Rotary Switch
 Proceedings of EuroHaptics 2003, Dublin, Ireland, pp. 343-350, July 6-9, 2003. Thresholds for Dynamic Changes in a Rotary Switch Shuo Yang 1, Hong Z. Tan 1, Pietro Buttolo 2, Matthew Johnston 2, and Zygmunt
Proceedings of EuroHaptics 2003, Dublin, Ireland, pp. 343-350, July 6-9, 2003. Thresholds for Dynamic Changes in a Rotary Switch Shuo Yang 1, Hong Z. Tan 1, Pietro Buttolo 2, Matthew Johnston 2, and Zygmunt
HAND-SHAPED INTERFACE FOR INTUITIVE HUMAN- ROBOT COMMUNICATION THROUGH HAPTIC MEDIA
 HAND-SHAPED INTERFACE FOR INTUITIVE HUMAN- ROBOT COMMUNICATION THROUGH HAPTIC MEDIA RIKU HIKIJI AND SHUJI HASHIMOTO Department of Applied Physics, School of Science and Engineering, Waseda University 3-4-1
HAND-SHAPED INTERFACE FOR INTUITIVE HUMAN- ROBOT COMMUNICATION THROUGH HAPTIC MEDIA RIKU HIKIJI AND SHUJI HASHIMOTO Department of Applied Physics, School of Science and Engineering, Waseda University 3-4-1
Graphical User Interfaces for Blind Users: An Overview of Haptic Devices
 Graphical User Interfaces for Blind Users: An Overview of Haptic Devices Hasti Seifi, CPSC554m: Assignment 1 Abstract Graphical user interfaces greatly enhanced usability of computer systems over older
Graphical User Interfaces for Blind Users: An Overview of Haptic Devices Hasti Seifi, CPSC554m: Assignment 1 Abstract Graphical user interfaces greatly enhanced usability of computer systems over older
Welcome to this course on «Natural Interactive Walking on Virtual Grounds»!
 Welcome to this course on «Natural Interactive Walking on Virtual Grounds»! The speaker is Anatole Lécuyer, senior researcher at Inria, Rennes, France; More information about him at : http://people.rennes.inria.fr/anatole.lecuyer/
Welcome to this course on «Natural Interactive Walking on Virtual Grounds»! The speaker is Anatole Lécuyer, senior researcher at Inria, Rennes, France; More information about him at : http://people.rennes.inria.fr/anatole.lecuyer/
Arbitrating Multimodal Outputs: Using Ambient Displays as Interruptions
 Arbitrating Multimodal Outputs: Using Ambient Displays as Interruptions Ernesto Arroyo MIT Media Laboratory 20 Ames Street E15-313 Cambridge, MA 02139 USA earroyo@media.mit.edu Ted Selker MIT Media Laboratory
Arbitrating Multimodal Outputs: Using Ambient Displays as Interruptions Ernesto Arroyo MIT Media Laboratory 20 Ames Street E15-313 Cambridge, MA 02139 USA earroyo@media.mit.edu Ted Selker MIT Media Laboratory