Learning the Proprioceptive and Acoustic Properties of Household Objects. Jivko Sinapov Willow Collaborators: Kaijen and Radu 6/24/2010
|
|
|
- Dennis McCormick
- 5 years ago
- Views:
Transcription
1 Learning the Proprioceptive and Acoustic Properties of Household Objects Jivko Sinapov Willow Collaborators: Kaijen and Radu 6/24/2010
2 What is Proprioception? It is the sense that indicates whether the body is moving with required effort, as well as where the various parts of the body are located in relation to each other. - Wikipedia
3 Why Proprioception? 3

4 Why Proprioception? Full Empty 4

5 Why Proprioception? Hard vs Soft

6 Lifting: gravity, effort, etc.






7 Pushing: friction, mass, etc.



8 Squeezing: compliance, flexibility
9 Power, Play and Exploration in Children and Animals, 2000
10 Why Audio?

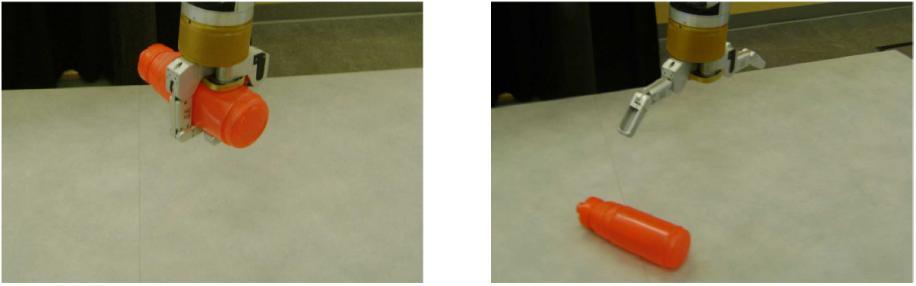
11 Why Audio? What actually happened: the robot dropped a can

12 The Importance of Natural Sound natural sound is as essential as visual information because sound tells us about things that we can't see, and it does so while our eyes are occupied elsewhere. Sounds are generated when materials interact, and the sounds tell us whether they are hitting, sliding, breaking, tearing, crumbling, or bouncing. Moreover, sounds differ according to the characteristics of the objects, according to their size, solidity, mass, tension, and material.


13 Sound Producing Event [Gaver, 1993]
14 Why should robots use natural sound and proprioceptive feedback? Human environments are cluttered with objects that generate sounds Help robot perceive events and objects outside of field of view Help robot perceive properties of objects that cannot be inferred by visual systems



15 Related Work: Proprioception Learning Haptic Representations of Objects : [ Natale et al (2004) ]
 Object")

16 Related Work: Acoustics Material Recognition (5 Materials) Object Recognition (4 test objects) [Richmond and Pai, 2000] [Torres-Jara, Natale and Fitzpatrick, 2005]

17 Previous Work Interactive Object Recognition Using Proprioceptive Feedback Key Question: Can objects be recognized using only joint-torque feedback from manipulation experience? [IROS SPMM Workshop, 2009]


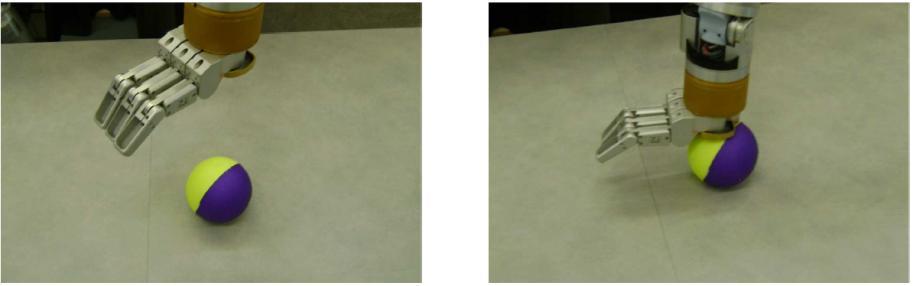

18 Exploratory Behaviors Lift: Crush: Shake: Push: Drop:

19 Video

20 50 household objects Different materials: metal, paper, plastic, wood, etc. Some objects have contents inside of them (e.g., pill bottle) All are graspable by the Barrett Hand

21 Object Recognition Pipeline r Joint-Torque Data Object Probability Estimates Dimensionality Reduction Discrete Proprioceptive Sequence Proprioceptive Recognition Model
22 Object Recognition Results

23 Acoustic Object Recognition Behavior Execution: WAV file recorded: Discrete Fourier Transform:
24 Frequency Bins Fourier Transform Time

25 Acoustic Object Recognition r Fourier Transform Object Probability Estimates Dimensionality Reduction Discrete Auditory Sequence Auditory Recognition Model
26 Cross-Modal Object Recognition Proprioception sequence Audio sequence Proprioceptive Recognition Model Auditory Recognition Model Weighted Combination
27

28 Application: Recognition of Dropped Objects
29 Summary of Previous Work Natural sound for object recognition (ICRA 2009) Natural sound can be used to detect an object s material and form object categories which group similar objects together (RSS MM workshop. 2009, ICDL 2010) Proprioceptive feedback can provide high object recognition accuracy when coupled with multiple behaviors applied on object (IROS SPMM 2009) Multiple exploratory behaviors are important for recognition ( AAAI 2010)

30 Perception Problem for PR2: Is the bottle full or empty?

31 General Approach Let the robot experience what full and empty bottles feel like Use prior experience to classify new bottles as either full or empty
32 Behavior: Power, Play and Exploration in Children and Animals, 2000
33 Data Representation Behavior Execution: Recorded Data: [J i, E i, C i ] Joint Positions Efforts Class Label {full, empty}

34 Training Procedure Objects: Procedure: Place object on table Robot grasps it and moves it in random 3D positions in space Robot puts object back down on table in random position; repeat. Training procedure is nearly autonomous

35 Classification Procedure Pr( empty ) Pr( full ) [J i, E i,?] Recognition Model Feature Extraction
36 Recognition Model X =[J i, E i,?] Recognition Model
37 Recognition Model X =[J i, E i,?] Recognition Model Find N closest neighbors to X in joint-feature space
38 Recognition Model X =[J i, E i,?] Recognition Model Find N closest neighbors to X in joint-feature space Train k-nn classifier C on the N neighbors that maps effort features to class label
39 Recognition Model X =[J i, E i,?] Recognition Model Find N closest neighbors to X in joint-feature space Train k-nn classifier C on the N neighbors that maps effort features to class label Use trained classifier C to label X
40 Application to Sorting Task Sorting task: Place empty bottles in trash Move full bottles on other side of table




41 Application to Sorting Task
42 Application to Sorting Task



43 Application to Sorting Task Ask me for demo
44 Classification Results Cross-Validation Accuracy with a single measurement: ~92 % (estimated with 800 training data points) Classification accuracy during sorting task with 5 or more measurements: 100% (estimated from 20 individual runs)
45 Can the same method be used to directly estimate the bottle s weight?
46 Can the same method be used to directly estimate the bottle s weight? Variable number of marbles in each bottle, from 0 to 80, at increments of 10
47 Can the same method be used to directly estimate the bottle s weight? Variable number of marbles in each bottle, from 0 to 80, at increments of 10 Mean abs. error: lbs ~7 marbles

48 Can the same method be used to directly estimate the bottle s weight? Variable number of marbles in each bottle, from 0 to 80, at increments of 10 Mean abs. error: lbs ~7 marbles



49 Applications to other tasks e.g., pushing a box to find out if it s full
50 Can auditory feedback be used to distinguish between empty and full bottles?


51 Can auditory feedback be used to distinguish between empty and full bottles? The sound generated when a bottle is dropped is dependent on whether the bottle is full or not




52 Can auditory feedback be used to distinguish between empty and full bottles? Empty Bottle Full Bottle


53 Auditory Event Segmentation Segmentation Event Tokens
54 Auditory Event Feature Extraction
55 Auditory Event Feature Extraction


56 Feature Extraction Auditory Event Features in R 18
 Pr( full")
57 Auditory Event Recognition Feature Extraction Auditory Recognition Model Pr( empty ) Pr( full )
58 Auditory Classification Results 5 drops of an empty bottle and 5 of a full bottle 24 auditory events w/ empty bottles and 13 w/ full Recognition Accuracy for individual events: k-nn: % SVM: 100 %
59 Conclusion The auditory and proprioceptive modalities can be useful for tasks that cannot be solved through vision Objects properties can be learned over the course of manipulation
60 Software Contributions Demo: sorting bottles Runs on cturtle Uses grasping pipeline for pick and place
61 Software Contributions Demo: sorting bottles Runs on cturtle Uses grasping pipeline for pick and place Package proprioception: Service for capturing and classifying proprioceptive feedback
62 Software Contributions Demo: sorting bottles Runs on cturtle Uses grasping pipeline for pick and place Package proprioception: Service for capturing and classifying proprioceptive feedback Package audio_classification: service that captures microphone input; computes Fast Fourier Transform, and extracts features for input to classifiers
63 Software Contributions Demo: sorting bottles Runs on cturtle Uses grasping pipeline for pick and place Package proprioception: Service for capturing and classifying proprioceptive feedback Package audio_classification: service that captures microphone input; computes Fast Fourier Transform, and extracts features for input to classifiers Service for general purpose classification and recognition on the fly
64 Future Work Apply proprioceptive and auditory recognition models to other types of objects: e.g., push a box to check if it s full shake an object to check if something is inside Generalize sorting task to other object types: e.g., sort by material type Implement routines for autonomous object exploration

65 Thank you 6 5
Learning to Order Objects using Haptic and Proprioceptive Exploratory Behaviors
 Learning to Order Objects using Haptic and Proprioceptive Exploratory Behaviors Jivko Sinapov, Priyanka Khante, Maxwell Svetlik, and Peter Stone Department of Computer Science University of Texas at Austin,
Learning to Order Objects using Haptic and Proprioceptive Exploratory Behaviors Jivko Sinapov, Priyanka Khante, Maxwell Svetlik, and Peter Stone Department of Computer Science University of Texas at Austin,
Learning to Detect Doorbell Buttons and Broken Ones on Portable Device by Haptic Exploration In An Unsupervised Way and Real-time.
 Learning to Detect Doorbell Buttons and Broken Ones on Portable Device by Haptic Exploration In An Unsupervised Way and Real-time Liping Wu April 21, 2011 Abstract The paper proposes a framework so that
Learning to Detect Doorbell Buttons and Broken Ones on Portable Device by Haptic Exploration In An Unsupervised Way and Real-time Liping Wu April 21, 2011 Abstract The paper proposes a framework so that
Haptics CS327A
 Haptics CS327A - 217 hap tic adjective relating to the sense of touch or to the perception and manipulation of objects using the senses of touch and proprioception 1 2 Slave Master 3 Courtesy of Walischmiller
Haptics CS327A - 217 hap tic adjective relating to the sense of touch or to the perception and manipulation of objects using the senses of touch and proprioception 1 2 Slave Master 3 Courtesy of Walischmiller
Feel the beat: using cross-modal rhythm to integrate perception of objects, others, and self
 Feel the beat: using cross-modal rhythm to integrate perception of objects, others, and self Paul Fitzpatrick and Artur M. Arsenio CSAIL, MIT Modal and amodal features Modal and amodal features (following
Feel the beat: using cross-modal rhythm to integrate perception of objects, others, and self Paul Fitzpatrick and Artur M. Arsenio CSAIL, MIT Modal and amodal features Modal and amodal features (following
Toward Interactive Learning of Object Categories by a Robot: A Case Study with Container and Non-Container Objects
 Toward Interactive Learning of Object Categories by a Robot: A Case Study with Container and Non-Container Objects Shane Griffith, Jivko Sinapov, Matthew Miller and Alexander Stoytchev Developmental Robotics
Toward Interactive Learning of Object Categories by a Robot: A Case Study with Container and Non-Container Objects Shane Griffith, Jivko Sinapov, Matthew Miller and Alexander Stoytchev Developmental Robotics
Chapter 2 Introduction to Haptics 2.1 Definition of Haptics
 Chapter 2 Introduction to Haptics 2.1 Definition of Haptics The word haptic originates from the Greek verb hapto to touch and therefore refers to the ability to touch and manipulate objects. The haptic
Chapter 2 Introduction to Haptics 2.1 Definition of Haptics The word haptic originates from the Greek verb hapto to touch and therefore refers to the ability to touch and manipulate objects. The haptic
Feelable User Interfaces: An Exploration of Non-Visual Tangible User Interfaces
 Feelable User Interfaces: An Exploration of Non-Visual Tangible User Interfaces Katrin Wolf Telekom Innovation Laboratories TU Berlin, Germany katrin.wolf@acm.org Peter Bennett Interaction and Graphics
Feelable User Interfaces: An Exploration of Non-Visual Tangible User Interfaces Katrin Wolf Telekom Innovation Laboratories TU Berlin, Germany katrin.wolf@acm.org Peter Bennett Interaction and Graphics
Salient features make a search easy
 Chapter General discussion This thesis examined various aspects of haptic search. It consisted of three parts. In the first part, the saliency of movability and compliance were investigated. In the second
Chapter General discussion This thesis examined various aspects of haptic search. It consisted of three parts. In the first part, the saliency of movability and compliance were investigated. In the second
Robotic System Simulation and Modeling Stefan Jörg Robotic and Mechatronic Center
 Robotic System Simulation and ing Stefan Jörg Robotic and Mechatronic Center Outline Introduction The SAFROS Robotic System Simulator Robotic System ing Conclusions Folie 2 DLR s Mirosurge: A versatile
Robotic System Simulation and ing Stefan Jörg Robotic and Mechatronic Center Outline Introduction The SAFROS Robotic System Simulator Robotic System ing Conclusions Folie 2 DLR s Mirosurge: A versatile
The Automatic Classification Problem. Perceptrons, SVMs, and Friends: Some Discriminative Models for Classification
 Perceptrons, SVMs, and Friends: Some Discriminative Models for Classification Parallel to AIMA 8., 8., 8.6.3, 8.9 The Automatic Classification Problem Assign object/event or sequence of objects/events
Perceptrons, SVMs, and Friends: Some Discriminative Models for Classification Parallel to AIMA 8., 8., 8.6.3, 8.9 The Automatic Classification Problem Assign object/event or sequence of objects/events
Proposers Day Workshop
 Proposers Day Workshop Monday, January 23, 2017 @srcjump, #JUMPpdw Cognitive Computing Vertical Research Center Mandy Pant Academic Research Director Intel Corporation Center Motivation Today s deep learning
Proposers Day Workshop Monday, January 23, 2017 @srcjump, #JUMPpdw Cognitive Computing Vertical Research Center Mandy Pant Academic Research Director Intel Corporation Center Motivation Today s deep learning
A developmental approach to grasping
 A developmental approach to grasping Lorenzo Natale, Giorgio Metta and Giulio Sandini LIRA-Lab, DIST, University of Genoa Viale Causa 13, 16145, Genova Italy email: {nat, pasa, sandini}@liralab.it Abstract
A developmental approach to grasping Lorenzo Natale, Giorgio Metta and Giulio Sandini LIRA-Lab, DIST, University of Genoa Viale Causa 13, 16145, Genova Italy email: {nat, pasa, sandini}@liralab.it Abstract
Learning haptic representation of objects
 Learning haptic representation of objects Lorenzo Natale, Giorgio Metta and Giulio Sandini LIRA-Lab, DIST University of Genoa viale Causa 13, 16145 Genova, Italy Email: nat, pasa, sandini @dist.unige.it
Learning haptic representation of objects Lorenzo Natale, Giorgio Metta and Giulio Sandini LIRA-Lab, DIST University of Genoa viale Causa 13, 16145 Genova, Italy Email: nat, pasa, sandini @dist.unige.it
ECC419 IMAGE PROCESSING
 ECC419 IMAGE PROCESSING INTRODUCTION Image Processing Image processing is a subclass of signal processing concerned specifically with pictures. Digital Image Processing, process digital images by means
ECC419 IMAGE PROCESSING INTRODUCTION Image Processing Image processing is a subclass of signal processing concerned specifically with pictures. Digital Image Processing, process digital images by means
System Inputs, Physical Modeling, and Time & Frequency Domains
 System Inputs, Physical Modeling, and Time & Frequency Domains There are three topics that require more discussion at this point of our study. They are: Classification of System Inputs, Physical Modeling,
System Inputs, Physical Modeling, and Time & Frequency Domains There are three topics that require more discussion at this point of our study. They are: Classification of System Inputs, Physical Modeling,
Computer Haptics and Applications
 Computer Haptics and Applications EURON Summer School 2003 Cagatay Basdogan, Ph.D. College of Engineering Koc University, Istanbul, 80910 (http://network.ku.edu.tr/~cbasdogan) Resources: EURON Summer School
Computer Haptics and Applications EURON Summer School 2003 Cagatay Basdogan, Ph.D. College of Engineering Koc University, Istanbul, 80910 (http://network.ku.edu.tr/~cbasdogan) Resources: EURON Summer School
Physics-Based Manipulation in Human Environments
 Vol. 31 No. 4, pp.353 357, 2013 353 Physics-Based Manipulation in Human Environments Mehmet R. Dogar Siddhartha S. Srinivasa The Robotics Institute, School of Computer Science, Carnegie Mellon University
Vol. 31 No. 4, pp.353 357, 2013 353 Physics-Based Manipulation in Human Environments Mehmet R. Dogar Siddhartha S. Srinivasa The Robotics Institute, School of Computer Science, Carnegie Mellon University
Research Seminar. Stefano CARRINO fr.ch
 Research Seminar Stefano CARRINO stefano.carrino@hefr.ch http://aramis.project.eia- fr.ch 26.03.2010 - based interaction Characterization Recognition Typical approach Design challenges, advantages, drawbacks
Research Seminar Stefano CARRINO stefano.carrino@hefr.ch http://aramis.project.eia- fr.ch 26.03.2010 - based interaction Characterization Recognition Typical approach Design challenges, advantages, drawbacks
Object Categorization in the Sink: Learning Behavior Grounded Object Categories with Water
 Object Categorization in the Sink: Learning Behavior Grounded Object Categories with Water Shane Griffith, Vladimir Sukhoy, Todd Wegter, and Alexander Stoytchev Abstract This paper explores whether auditory
Object Categorization in the Sink: Learning Behavior Grounded Object Categories with Water Shane Griffith, Vladimir Sukhoy, Todd Wegter, and Alexander Stoytchev Abstract This paper explores whether auditory
SIGVerse - A Simulation Platform for Human-Robot Interaction Jeffrey Too Chuan TAN and Tetsunari INAMURA National Institute of Informatics, Japan The
 SIGVerse - A Simulation Platform for Human-Robot Interaction Jeffrey Too Chuan TAN and Tetsunari INAMURA National Institute of Informatics, Japan The 29 th Annual Conference of The Robotics Society of
SIGVerse - A Simulation Platform for Human-Robot Interaction Jeffrey Too Chuan TAN and Tetsunari INAMURA National Institute of Informatics, Japan The 29 th Annual Conference of The Robotics Society of
Learning Actions from Demonstration
 Learning Actions from Demonstration Michael Tirtowidjojo, Matthew Frierson, Benjamin Singer, Palak Hirpara October 2, 2016 Abstract The goal of our project is twofold. First, we will design a controller
Learning Actions from Demonstration Michael Tirtowidjojo, Matthew Frierson, Benjamin Singer, Palak Hirpara October 2, 2016 Abstract The goal of our project is twofold. First, we will design a controller
Perception. Read: AIMA Chapter 24 & Chapter HW#8 due today. Vision
 11-25-2013 Perception Vision Read: AIMA Chapter 24 & Chapter 25.3 HW#8 due today visual aural haptic & tactile vestibular (balance: equilibrium, acceleration, and orientation wrt gravity) olfactory taste
11-25-2013 Perception Vision Read: AIMA Chapter 24 & Chapter 25.3 HW#8 due today visual aural haptic & tactile vestibular (balance: equilibrium, acceleration, and orientation wrt gravity) olfactory taste
CS 378: Autonomous Intelligent Robotics. Instructor: Jivko Sinapov
 CS 378: Autonomous Intelligent Robotics Instructor: Jivko Sinapov http://www.cs.utexas.edu/~jsinapov/teaching/cs378/ Semester Schedule C++ and Robot Operating System (ROS) Learning to use our robots Computational
CS 378: Autonomous Intelligent Robotics Instructor: Jivko Sinapov http://www.cs.utexas.edu/~jsinapov/teaching/cs378/ Semester Schedule C++ and Robot Operating System (ROS) Learning to use our robots Computational
Advanced Techniques for Mobile Robotics Location-Based Activity Recognition
 Advanced Techniques for Mobile Robotics Location-Based Activity Recognition Wolfram Burgard, Cyrill Stachniss, Kai Arras, Maren Bennewitz Activity Recognition Based on L. Liao, D. J. Patterson, D. Fox,
Advanced Techniques for Mobile Robotics Location-Based Activity Recognition Wolfram Burgard, Cyrill Stachniss, Kai Arras, Maren Bennewitz Activity Recognition Based on L. Liao, D. J. Patterson, D. Fox,
Comparative Assessment of Sensing Modalities on Manipulation Failure Detection
 Comparative Assessment of Sensing Modalities on Manipulation Failure Detection Arda Inceoglu and Gökhan Ince and Yusuf Yaslan and Sanem Sariel Abstract Execution monitoring is important for the robot to
Comparative Assessment of Sensing Modalities on Manipulation Failure Detection Arda Inceoglu and Gökhan Ince and Yusuf Yaslan and Sanem Sariel Abstract Execution monitoring is important for the robot to
Siddhartha Srinivasa Senior Research Scientist Intel Pittsburgh
 Reconciling Geometric Planners with Physical Manipulation Siddhartha Srinivasa Senior Research Scientist Intel Pittsburgh Director The Personal Robotics Lab The Robotics Institute, CMU Reconciling Geometric
Reconciling Geometric Planners with Physical Manipulation Siddhartha Srinivasa Senior Research Scientist Intel Pittsburgh Director The Personal Robotics Lab The Robotics Institute, CMU Reconciling Geometric
Effects of Integrated Intent Recognition and Communication on Human-Robot Collaboration
 Effects of Integrated Intent Recognition and Communication on Human-Robot Collaboration Mai Lee Chang 1, Reymundo A. Gutierrez 2, Priyanka Khante 1, Elaine Schaertl Short 1, Andrea Lockerd Thomaz 1 Abstract
Effects of Integrated Intent Recognition and Communication on Human-Robot Collaboration Mai Lee Chang 1, Reymundo A. Gutierrez 2, Priyanka Khante 1, Elaine Schaertl Short 1, Andrea Lockerd Thomaz 1 Abstract
VIRTUAL REALITY Introduction. Emil M. Petriu SITE, University of Ottawa
 VIRTUAL REALITY Introduction Emil M. Petriu SITE, University of Ottawa Natural and Virtual Reality Virtual Reality Interactive Virtual Reality Virtualized Reality Augmented Reality HUMAN PERCEPTION OF
VIRTUAL REALITY Introduction Emil M. Petriu SITE, University of Ottawa Natural and Virtual Reality Virtual Reality Interactive Virtual Reality Virtualized Reality Augmented Reality HUMAN PERCEPTION OF
Sensors & Systems for Human Safety Assurance in Collaborative Exploration
 Sensing and Sensors CMU SCS RI 16-722 S09 Ned Fox nfox@andrew.cmu.edu Outline What is collaborative exploration? Humans sensing robots Robots sensing humans Overseers sensing both Inherently safe systems
Sensing and Sensors CMU SCS RI 16-722 S09 Ned Fox nfox@andrew.cmu.edu Outline What is collaborative exploration? Humans sensing robots Robots sensing humans Overseers sensing both Inherently safe systems
Intelligent Robotics Sensors and Actuators
 Intelligent Robotics Sensors and Actuators Luís Paulo Reis (University of Porto) Nuno Lau (University of Aveiro) The Perception Problem Do we need perception? Complexity Uncertainty Dynamic World Detection/Correction
Intelligent Robotics Sensors and Actuators Luís Paulo Reis (University of Porto) Nuno Lau (University of Aveiro) The Perception Problem Do we need perception? Complexity Uncertainty Dynamic World Detection/Correction
Detecting the Functional Similarities Between Tools Using a Hierarchical Representation of Outcomes
 Detecting the Functional Similarities Between Tools Using a Hierarchical Representation of Outcomes Jivko Sinapov and Alexadner Stoytchev Developmental Robotics Lab Iowa State University {jsinapov, alexs}@iastate.edu
Detecting the Functional Similarities Between Tools Using a Hierarchical Representation of Outcomes Jivko Sinapov and Alexadner Stoytchev Developmental Robotics Lab Iowa State University {jsinapov, alexs}@iastate.edu
Towards Learning to Identify Zippers
 HCI 585X Sahai - 0 Contents Introduction... 2 Motivation... 2 Need/Target Audience... 2 Related Research... 3 Proposed Approach... 5 Equipment... 5 Robot... 5 Fingernail... 5 Articles with zippers... 6
HCI 585X Sahai - 0 Contents Introduction... 2 Motivation... 2 Need/Target Audience... 2 Related Research... 3 Proposed Approach... 5 Equipment... 5 Robot... 5 Fingernail... 5 Articles with zippers... 6
A sensitive approach to grasping
 A sensitive approach to grasping Lorenzo Natale lorenzo@csail.mit.edu Massachusetts Institute Technology Computer Science and Artificial Intelligence Laboratory Cambridge, MA 02139 US Eduardo Torres-Jara
A sensitive approach to grasping Lorenzo Natale lorenzo@csail.mit.edu Massachusetts Institute Technology Computer Science and Artificial Intelligence Laboratory Cambridge, MA 02139 US Eduardo Torres-Jara
2. Visually- Guided Grasping (3D)
") Autonomous Robotic Manipulation (3/4) Pedro J Sanz sanzp@uji.es 2. Visually- Guided Grasping (3D) April 2010 Fundamentals of Robotics (UdG) 2 1 Other approaches for finding 3D grasps Analyzing complete
Autonomous Robotic Manipulation (3/4) Pedro J Sanz sanzp@uji.es 2. Visually- Guided Grasping (3D) April 2010 Fundamentals of Robotics (UdG) 2 1 Other approaches for finding 3D grasps Analyzing complete
ROBOTICS ENG YOUSEF A. SHATNAWI INTRODUCTION
 ROBOTICS INTRODUCTION THIS COURSE IS TWO PARTS Mobile Robotics. Locomotion (analogous to manipulation) (Legged and wheeled robots). Navigation and obstacle avoidance algorithms. Robot Vision Sensors and
ROBOTICS INTRODUCTION THIS COURSE IS TWO PARTS Mobile Robotics. Locomotion (analogous to manipulation) (Legged and wheeled robots). Navigation and obstacle avoidance algorithms. Robot Vision Sensors and
Physical Human Robot Interaction
 MIN Faculty Department of Informatics Physical Human Robot Interaction Intelligent Robotics Seminar Ilay Köksal University of Hamburg Faculty of Mathematics, Informatics and Natural Sciences Department
MIN Faculty Department of Informatics Physical Human Robot Interaction Intelligent Robotics Seminar Ilay Köksal University of Hamburg Faculty of Mathematics, Informatics and Natural Sciences Department
YDDON. Humans, Robots, & Intelligent Objects New communication approaches
 YDDON Humans, Robots, & Intelligent Objects New communication approaches Building Robot intelligence Interdisciplinarity Turning things into robots www.ydrobotics.co m Edifício A Moagem Cidade do Engenho
YDDON Humans, Robots, & Intelligent Objects New communication approaches Building Robot intelligence Interdisciplinarity Turning things into robots www.ydrobotics.co m Edifício A Moagem Cidade do Engenho
Haptic presentation of 3D objects in virtual reality for the visually disabled
 Haptic presentation of 3D objects in virtual reality for the visually disabled M Moranski, A Materka Institute of Electronics, Technical University of Lodz, Wolczanska 211/215, Lodz, POLAND marcin.moranski@p.lodz.pl,
Haptic presentation of 3D objects in virtual reality for the visually disabled M Moranski, A Materka Institute of Electronics, Technical University of Lodz, Wolczanska 211/215, Lodz, POLAND marcin.moranski@p.lodz.pl,
8.3 Basic Parameters for Audio
 8.3 Basic Parameters for Audio Analysis Physical audio signal: simple one-dimensional amplitude = loudness frequency = pitch Psycho-acoustic features: complex A real-life tone arises from a complex superposition
8.3 Basic Parameters for Audio Analysis Physical audio signal: simple one-dimensional amplitude = loudness frequency = pitch Psycho-acoustic features: complex A real-life tone arises from a complex superposition
EE631 Cooperating Autonomous Mobile Robots. Lecture 1: Introduction. Prof. Yi Guo ECE Department
 EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
CS 378: Autonomous Intelligent Robotics. Instructor: Jivko Sinapov
 CS 378: Autonomous Intelligent Robotics Instructor: Jivko Sinapov http://www.cs.utexas.edu/~jsinapov/teaching/cs378/ Readings for this week Maruyama, Shin, et al. "Change occurs when body meets environment:
CS 378: Autonomous Intelligent Robotics Instructor: Jivko Sinapov http://www.cs.utexas.edu/~jsinapov/teaching/cs378/ Readings for this week Maruyama, Shin, et al. "Change occurs when body meets environment:
CS295-1 Final Project : AIBO
 CS295-1 Final Project : AIBO Mert Akdere, Ethan F. Leland December 20, 2005 Abstract This document is the final report for our CS295-1 Sensor Data Management Course Final Project: Project AIBO. The main
CS295-1 Final Project : AIBO Mert Akdere, Ethan F. Leland December 20, 2005 Abstract This document is the final report for our CS295-1 Sensor Data Management Course Final Project: Project AIBO. The main
Interactive Identification of Writing Instruments and Writable Surfaces by a Robot
 Interactive Identification of Writing Instruments and Writable Surfaces by a Robot Ritika Sahai, Shane Griffith and Alexander Stoytchev Developmental Robotics Laboratory Iowa State University {ritika,
Interactive Identification of Writing Instruments and Writable Surfaces by a Robot Ritika Sahai, Shane Griffith and Alexander Stoytchev Developmental Robotics Laboratory Iowa State University {ritika,
Virtual Experiments as a Tool for Active Engagement
 Virtual Experiments as a Tool for Active Engagement Lei Bao Stephen Stonebraker Gyoungho Lee Physics Education Research Group Department of Physics The Ohio State University Context Cues and Knowledge
Virtual Experiments as a Tool for Active Engagement Lei Bao Stephen Stonebraker Gyoungho Lee Physics Education Research Group Department of Physics The Ohio State University Context Cues and Knowledge
Information and Program
 Robotics 1 Information and Program Prof. Alessandro De Luca Robotics 1 1 Robotics 1 2017/18! First semester (12 weeks)! Monday, October 2, 2017 Monday, December 18, 2017! Courses of study (with this course
Robotics 1 Information and Program Prof. Alessandro De Luca Robotics 1 1 Robotics 1 2017/18! First semester (12 weeks)! Monday, October 2, 2017 Monday, December 18, 2017! Courses of study (with this course
Benchmarking Intelligent Service Robots through Scientific Competitions: the approach. Luca Iocchi. Sapienza University of Rome, Italy
 Benchmarking Intelligent Service Robots through Scientific Competitions: the RoboCup@Home approach Luca Iocchi Sapienza University of Rome, Italy Motivation Benchmarking Domestic Service Robots Complex
Benchmarking Intelligent Service Robots through Scientific Competitions: the RoboCup@Home approach Luca Iocchi Sapienza University of Rome, Italy Motivation Benchmarking Domestic Service Robots Complex
Digitizing Color. Place Value in a Decimal Number. Place Value in a Binary Number. Chapter 11: Light, Sound, Magic: Representing Multimedia Digitally
 Chapter 11: Light, Sound, Magic: Representing Multimedia Digitally Fluency with Information Technology Third Edition by Lawrence Snyder Digitizing Color RGB Colors: Binary Representation Giving the intensities
Chapter 11: Light, Sound, Magic: Representing Multimedia Digitally Fluency with Information Technology Third Edition by Lawrence Snyder Digitizing Color RGB Colors: Binary Representation Giving the intensities
Biometrics Final Project Report
 Andres Uribe au2158 Introduction Biometrics Final Project Report Coin Counter The main objective for the project was to build a program that could count the coins money value in a picture. The work was
Andres Uribe au2158 Introduction Biometrics Final Project Report Coin Counter The main objective for the project was to build a program that could count the coins money value in a picture. The work was
arxiv: v1 [cs.ro] 27 Jun 2017
![arxiv: v1 [cs.ro] 27 Jun 2017](/thumbs/83/88181864.jpg "arxiv: v1 [cs.ro] 27 Jun 2017") Controlled Tactile Exploration and Haptic Object Recognition Massimo Regoli, Nawid Jamali, Giorgio Metta and Lorenzo Natale icub Facility Istituto Italiano di Tecnologia via Morego, 30, 16163 Genova, Italy
Controlled Tactile Exploration and Haptic Object Recognition Massimo Regoli, Nawid Jamali, Giorgio Metta and Lorenzo Natale icub Facility Istituto Italiano di Tecnologia via Morego, 30, 16163 Genova, Italy
Jivko Sinapov The James Schmolze Assistant Professor in Computer Science Tufts University
 Jivko Sinapov The James Schmolze Assistant Professor in Computer Science Tufts University Office address Department of Computer Science Office: Halligan 213 161 College Ave Phone: (585) 703-0463 Tufts
Jivko Sinapov The James Schmolze Assistant Professor in Computer Science Tufts University Office address Department of Computer Science Office: Halligan 213 161 College Ave Phone: (585) 703-0463 Tufts
Dropping Disks on Pegs: a Robotic Learning Approach
 Dropping Disks on Pegs: a Robotic Learning Approach Adam Campbell Cpr E 585X Final Project Report Dr. Alexander Stoytchev 21 April 2011 1 Table of Contents: Introduction...3 Related Work...4 Experimental
Dropping Disks on Pegs: a Robotic Learning Approach Adam Campbell Cpr E 585X Final Project Report Dr. Alexander Stoytchev 21 April 2011 1 Table of Contents: Introduction...3 Related Work...4 Experimental
Interacting within Virtual Worlds (based on talks by Greg Welch and Mark Mine)
") Interacting within Virtual Worlds (based on talks by Greg Welch and Mark Mine) Presentation Working in a virtual world Interaction principles Interaction examples Why VR in the First Place? Direct perception
Interacting within Virtual Worlds (based on talks by Greg Welch and Mark Mine) Presentation Working in a virtual world Interaction principles Interaction examples Why VR in the First Place? Direct perception
Adaptive Humanoid Robot Arm Motion Generation by Evolved Neural Controllers
 Proceedings of the 3 rd International Conference on Mechanical Engineering and Mechatronics Prague, Czech Republic, August 14-15, 2014 Paper No. 170 Adaptive Humanoid Robot Arm Motion Generation by Evolved
Proceedings of the 3 rd International Conference on Mechanical Engineering and Mechatronics Prague, Czech Republic, August 14-15, 2014 Paper No. 170 Adaptive Humanoid Robot Arm Motion Generation by Evolved
5/17/2009. Digitizing Color. Place Value in a Binary Number. Place Value in a Decimal Number. Place Value in a Binary Number
 Chapter 11: Light, Sound, Magic: Representing Multimedia Digitally Digitizing Color Fluency with Information Technology Third Edition by Lawrence Snyder RGB Colors: Binary Representation Giving the intensities
Chapter 11: Light, Sound, Magic: Representing Multimedia Digitally Digitizing Color Fluency with Information Technology Third Edition by Lawrence Snyder RGB Colors: Binary Representation Giving the intensities
Visual Rules. Why are they necessary?
 Visual Rules Why are they necessary? Because the image on the retina has just two dimensions, a retinal image allows countless interpretations of a visual object in three dimensions. Underspecified Poverty
Visual Rules Why are they necessary? Because the image on the retina has just two dimensions, a retinal image allows countless interpretations of a visual object in three dimensions. Underspecified Poverty
Speech Enhancement Based On Spectral Subtraction For Speech Recognition System With Dpcm
 International OPEN ACCESS Journal Of Modern Engineering Research (IJMER) Speech Enhancement Based On Spectral Subtraction For Speech Recognition System With Dpcm A.T. Rajamanickam, N.P.Subiramaniyam, A.Balamurugan*,
International OPEN ACCESS Journal Of Modern Engineering Research (IJMER) Speech Enhancement Based On Spectral Subtraction For Speech Recognition System With Dpcm A.T. Rajamanickam, N.P.Subiramaniyam, A.Balamurugan*,
Figure 2: Examples of (Left) one pull trial with a 3.5 tube size and (Right) different pull angles with 4.5 tube size. Figure 1: Experimental Setup.
 one pull trial with a 3.5 tube size and (Right) different pull angles with 4.5 tube size. Figure 1: Experimental Setup.") Haptic Classification and Faulty Sensor Compensation for a Robotic Hand Hannah Stuart, Paul Karplus, Habiya Beg Department of Mechanical Engineering, Stanford University Abstract Currently, robots operating
Haptic Classification and Faulty Sensor Compensation for a Robotic Hand Hannah Stuart, Paul Karplus, Habiya Beg Department of Mechanical Engineering, Stanford University Abstract Currently, robots operating
Neural Networks The New Moore s Law
 Neural Networks The New Moore s Law Chris Rowen, PhD, FIEEE CEO Cognite Ventures December 216 Outline Moore s Law Revisited: Efficiency Drives Productivity Embedded Neural Network Product Segments Efficiency
Neural Networks The New Moore s Law Chris Rowen, PhD, FIEEE CEO Cognite Ventures December 216 Outline Moore s Law Revisited: Efficiency Drives Productivity Embedded Neural Network Product Segments Efficiency
Digital Signal Processing:
 Digital Signal Processing: Mathematical and algorithmic manipulation of discretized and quantized or naturally digital signals in order to extract the most relevant and pertinent information that is carried
Digital Signal Processing: Mathematical and algorithmic manipulation of discretized and quantized or naturally digital signals in order to extract the most relevant and pertinent information that is carried
HAND-SHAPED INTERFACE FOR INTUITIVE HUMAN- ROBOT COMMUNICATION THROUGH HAPTIC MEDIA
 HAND-SHAPED INTERFACE FOR INTUITIVE HUMAN- ROBOT COMMUNICATION THROUGH HAPTIC MEDIA RIKU HIKIJI AND SHUJI HASHIMOTO Department of Applied Physics, School of Science and Engineering, Waseda University 3-4-1
HAND-SHAPED INTERFACE FOR INTUITIVE HUMAN- ROBOT COMMUNICATION THROUGH HAPTIC MEDIA RIKU HIKIJI AND SHUJI HASHIMOTO Department of Applied Physics, School of Science and Engineering, Waseda University 3-4-1
MILITARY PRODUCTION MINISTRY Training Sector. Using and Interpreting Information. Lecture 6. Flow Charts.
 MILITARY PRODUCTION MINISTRY Training Sector Using and Interpreting Information Lecture 6 Saturday, March 19, 2011 2 What is the Flow Chart? The flow chart is a graphical or symbolic representation of
MILITARY PRODUCTION MINISTRY Training Sector Using and Interpreting Information Lecture 6 Saturday, March 19, 2011 2 What is the Flow Chart? The flow chart is a graphical or symbolic representation of
Community Update and Next Steps
 Community Update and Next Steps Stewart Tansley, PhD Senior Research Program Manager & Product Manager (acting) Special Guest: Anoop Gupta, PhD Distinguished Scientist Project Natal Origins: Project Natal
Community Update and Next Steps Stewart Tansley, PhD Senior Research Program Manager & Product Manager (acting) Special Guest: Anoop Gupta, PhD Distinguished Scientist Project Natal Origins: Project Natal
May Edited by: Roemi E. Fernández Héctor Montes
 May 2016 Edited by: Roemi E. Fernández Héctor Montes RoboCity16 Open Conference on Future Trends in Robotics Editors Roemi E. Fernández Saavedra Héctor Montes Franceschi Madrid, 26 May 2016 Edited by:
May 2016 Edited by: Roemi E. Fernández Héctor Montes RoboCity16 Open Conference on Future Trends in Robotics Editors Roemi E. Fernández Saavedra Héctor Montes Franceschi Madrid, 26 May 2016 Edited by:
Prospective Teleautonomy For EOD Operations
 Perception and task guidance Perceived world model & intent Prospective Teleautonomy For EOD Operations Prof. Seth Teller Electrical Engineering and Computer Science Department Computer Science and Artificial
Perception and task guidance Perceived world model & intent Prospective Teleautonomy For EOD Operations Prof. Seth Teller Electrical Engineering and Computer Science Department Computer Science and Artificial
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute State one reason for investigating and building humanoid robot (4 pts) List two
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute State one reason for investigating and building humanoid robot (4 pts) List two
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute (6 pts )A 2-DOF manipulator arm is attached to a mobile base with non-holonomic
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute (6 pts )A 2-DOF manipulator arm is attached to a mobile base with non-holonomic
Proprioception & force sensing
 Proprioception & force sensing Roope Raisamo Tampere Unit for Computer-Human Interaction (TAUCHI) School of Information Sciences University of Tampere, Finland Based on material by Jussi Rantala, Jukka
Proprioception & force sensing Roope Raisamo Tampere Unit for Computer-Human Interaction (TAUCHI) School of Information Sciences University of Tampere, Finland Based on material by Jussi Rantala, Jukka
DeCAF: A Deep Convolutional Activation Feature for Generic Visual Recognition. ECE 289G: Paper Presentation #3 Philipp Gysel
 DeCAF: A Deep Convolutional Activation Feature for Generic Visual Recognition ECE 289G: Paper Presentation #3 Philipp Gysel Autonomous Car ECE 289G Paper Presentation, Philipp Gysel Slide 2 Source: maps.google.com
DeCAF: A Deep Convolutional Activation Feature for Generic Visual Recognition ECE 289G: Paper Presentation #3 Philipp Gysel Autonomous Car ECE 289G Paper Presentation, Philipp Gysel Slide 2 Source: maps.google.com
Sensing. Autonomous systems. Properties. Classification. Key requirement of autonomous systems. An AS should be connected to the outside world.
 Sensing Key requirement of autonomous systems. An AS should be connected to the outside world. Autonomous systems Convert a physical value to an electrical value. From temperature, humidity, light, to
Sensing Key requirement of autonomous systems. An AS should be connected to the outside world. Autonomous systems Convert a physical value to an electrical value. From temperature, humidity, light, to
Research Statement MAXIM LIKHACHEV
 Research Statement MAXIM LIKHACHEV My long-term research goal is to develop a methodology for robust real-time decision-making in autonomous systems. To achieve this goal, my students and I research novel
Research Statement MAXIM LIKHACHEV My long-term research goal is to develop a methodology for robust real-time decision-making in autonomous systems. To achieve this goal, my students and I research novel
Introduction to Vision & Robotics
 Introduction to Vision & Robotics Vittorio Ferrari, 650-2697,IF 1.27 vferrari@staffmail.inf.ed.ac.uk Michael Herrmann, 651-7177, IF1.42 mherrman@inf.ed.ac.uk Lectures: Handouts will be on the web (but
Introduction to Vision & Robotics Vittorio Ferrari, 650-2697,IF 1.27 vferrari@staffmail.inf.ed.ac.uk Michael Herrmann, 651-7177, IF1.42 mherrman@inf.ed.ac.uk Lectures: Handouts will be on the web (but
Stage 2. Content OUTCOMES SKILLS. Attitudes (VA) Values & Working Scientifically (WS)
 Values & Working Scientifically (WS)") SKILLS Working Scientifically (WS) OUTCOMES Values & Attitudes (VA) Stage 2 shows interest in and enthusiasm for science and technology, responding to their curiosity, questions and perceived needs, wants
SKILLS Working Scientifically (WS) OUTCOMES Values & Attitudes (VA) Stage 2 shows interest in and enthusiasm for science and technology, responding to their curiosity, questions and perceived needs, wants
Real Time Hand Gesture Tracking for Network Centric Application
 Real Time Hand Gesture Tracking for Network Centric Application Abstract Chukwuemeka Chijioke Obasi 1 *, Christiana Chikodi Okezie 2, Ken Akpado 2, Chukwu Nnaemeka Paul 3, Asogwa, Chukwudi Samuel 1, Akuma
Real Time Hand Gesture Tracking for Network Centric Application Abstract Chukwuemeka Chijioke Obasi 1 *, Christiana Chikodi Okezie 2, Ken Akpado 2, Chukwu Nnaemeka Paul 3, Asogwa, Chukwudi Samuel 1, Akuma
Overview Agents, environments, typical components
 Overview Agents, environments, typical components CSC752 Autonomous Robotic Systems Ubbo Visser Department of Computer Science University of Miami January 23, 2017 Outline 1 Autonomous robots 2 Agents
Overview Agents, environments, typical components CSC752 Autonomous Robotic Systems Ubbo Visser Department of Computer Science University of Miami January 23, 2017 Outline 1 Autonomous robots 2 Agents
Confidence-Based Multi-Robot Learning from Demonstration
 Int J Soc Robot (2010) 2: 195 215 DOI 10.1007/s12369-010-0060-0 Confidence-Based Multi-Robot Learning from Demonstration Sonia Chernova Manuela Veloso Accepted: 5 May 2010 / Published online: 19 May 2010
Int J Soc Robot (2010) 2: 195 215 DOI 10.1007/s12369-010-0060-0 Confidence-Based Multi-Robot Learning from Demonstration Sonia Chernova Manuela Veloso Accepted: 5 May 2010 / Published online: 19 May 2010
Indoor Location Detection
 Indoor Location Detection Arezou Pourmir Abstract: This project is a classification problem and tries to distinguish some specific places from each other. We use the acoustic waves sent from the speaker
Indoor Location Detection Arezou Pourmir Abstract: This project is a classification problem and tries to distinguish some specific places from each other. We use the acoustic waves sent from the speaker
Is your next colleague a cobot?
 Is your next colleague a cobot? Technifutur 29 November 2016 30.11.16 1 Agenda Main features Cobots vs industrial robots Add-ons Trends Case assessment Demonstrator 30.11.16 2 What s in a name? "Collaborative
Is your next colleague a cobot? Technifutur 29 November 2016 30.11.16 1 Agenda Main features Cobots vs industrial robots Add-ons Trends Case assessment Demonstrator 30.11.16 2 What s in a name? "Collaborative
Artificial Intelligence and Mobile Robots: Successes and Challenges
 Artificial Intelligence and Mobile Robots: Successes and Challenges David Kortenkamp NASA Johnson Space Center Metrica Inc./TRACLabs Houton TX 77058 kortenkamp@jsc.nasa.gov http://www.traclabs.com/~korten
Artificial Intelligence and Mobile Robots: Successes and Challenges David Kortenkamp NASA Johnson Space Center Metrica Inc./TRACLabs Houton TX 77058 kortenkamp@jsc.nasa.gov http://www.traclabs.com/~korten
The project. General challenges and problems. Our subjects. The attachment and locomotion system
 The project The Ceilbot project is a study and research project organized at the Helsinki University of Technology. The aim of the project is to design and prototype a multifunctional robot which takes
The project The Ceilbot project is a study and research project organized at the Helsinki University of Technology. The aim of the project is to design and prototype a multifunctional robot which takes
2014 Market Trends Webinar Series
 Robotic Industries Association 2014 Market Trends Webinar Series Watch live or archived at no cost Learn about the latest innovations in robotics Sponsored by leading robotics companies 1 2014 Calendar
Robotic Industries Association 2014 Market Trends Webinar Series Watch live or archived at no cost Learn about the latest innovations in robotics Sponsored by leading robotics companies 1 2014 Calendar
SSB Debate: Model-based Inference vs. Machine Learning
 SSB Debate: Model-based nference vs. Machine Learning June 3, 2018 SSB 2018 June 3, 2018 1 / 20 Machine learning in the biological sciences SSB 2018 June 3, 2018 2 / 20 Machine learning in the biological
SSB Debate: Model-based nference vs. Machine Learning June 3, 2018 SSB 2018 June 3, 2018 1 / 20 Machine learning in the biological sciences SSB 2018 June 3, 2018 2 / 20 Machine learning in the biological
The Jigsaw Continuous Sensing Engine for Mobile Phone Applications!
 The Jigsaw Continuous Sensing Engine for Mobile Phone Applications! Hong Lu, Jun Yang, Zhigang Liu, Nicholas D. Lane, Tanzeem Choudhury, Andrew T. Campbell" CS Department Dartmouth College Nokia Research
The Jigsaw Continuous Sensing Engine for Mobile Phone Applications! Hong Lu, Jun Yang, Zhigang Liu, Nicholas D. Lane, Tanzeem Choudhury, Andrew T. Campbell" CS Department Dartmouth College Nokia Research
Colorful Image Colorizations Supplementary Material
 Colorful Image Colorizations Supplementary Material Richard Zhang, Phillip Isola, Alexei A. Efros {rich.zhang, isola, efros}@eecs.berkeley.edu University of California, Berkeley 1 Overview This document
Colorful Image Colorizations Supplementary Material Richard Zhang, Phillip Isola, Alexei A. Efros {rich.zhang, isola, efros}@eecs.berkeley.edu University of California, Berkeley 1 Overview This document
Where do Actions Come From? Autonomous Robot Learning of Objects and Actions
 Where do Actions Come From? Autonomous Robot Learning of Objects and Actions Joseph Modayil and Benjamin Kuipers Department of Computer Sciences The University of Texas at Austin Abstract Decades of AI
Where do Actions Come From? Autonomous Robot Learning of Objects and Actions Joseph Modayil and Benjamin Kuipers Department of Computer Sciences The University of Texas at Austin Abstract Decades of AI
Virtual Grasping Using a Data Glove
 Virtual Grasping Using a Data Glove By: Rachel Smith Supervised By: Dr. Kay Robbins 3/25/2005 University of Texas at San Antonio Motivation Navigation in 3D worlds is awkward using traditional mouse Direct
Virtual Grasping Using a Data Glove By: Rachel Smith Supervised By: Dr. Kay Robbins 3/25/2005 University of Texas at San Antonio Motivation Navigation in 3D worlds is awkward using traditional mouse Direct
Dimension Reduction of the Modulation Spectrogram for Speaker Verification
 Dimension Reduction of the Modulation Spectrogram for Speaker Verification Tomi Kinnunen Speech and Image Processing Unit Department of Computer Science University of Joensuu, Finland Kong Aik Lee and
Dimension Reduction of the Modulation Spectrogram for Speaker Verification Tomi Kinnunen Speech and Image Processing Unit Department of Computer Science University of Joensuu, Finland Kong Aik Lee and
Learning Multi-Modal Grounded Linguistic Semantics by Playing I Spy
 Proceedings of the Twenty-Fifth International Joint Conference on Artificial Intelligence (IJCAI-16) Learning Multi-Modal Grounded Linguistic Semantics by Playing I Spy Jesse Thomason, Jivko Sinapov, Maxwell
Proceedings of the Twenty-Fifth International Joint Conference on Artificial Intelligence (IJCAI-16) Learning Multi-Modal Grounded Linguistic Semantics by Playing I Spy Jesse Thomason, Jivko Sinapov, Maxwell
Introduction to Vision & Robotics
 Introduction to Vision & Robotics by Bob Fisher rbf@inf.ed.ac.uk Introduction to Robotics Introduction Some definitions Applications of robotics and vision The challenge: a demonstration Historical highlights
Introduction to Vision & Robotics by Bob Fisher rbf@inf.ed.ac.uk Introduction to Robotics Introduction Some definitions Applications of robotics and vision The challenge: a demonstration Historical highlights
Sensing and Perception
 Unit D tion Exploring Robotics Spring, 2013 D.1 Why does a robot need sensors? the environment is complex the environment is dynamic enable the robot to learn about current conditions in its environment.
Unit D tion Exploring Robotics Spring, 2013 D.1 Why does a robot need sensors? the environment is complex the environment is dynamic enable the robot to learn about current conditions in its environment.
Multi-Modal User Interaction
 Multi-Modal User Interaction Lecture 4: Multiple Modalities Zheng-Hua Tan Department of Electronic Systems Aalborg University, Denmark zt@es.aau.dk MMUI, IV, Zheng-Hua Tan 1 Outline Multimodal interface
Multi-Modal User Interaction Lecture 4: Multiple Modalities Zheng-Hua Tan Department of Electronic Systems Aalborg University, Denmark zt@es.aau.dk MMUI, IV, Zheng-Hua Tan 1 Outline Multimodal interface
UNIT VI. Current approaches to programming are classified as into two major categories:
 Unit VI 1 UNIT VI ROBOT PROGRAMMING A robot program may be defined as a path in space to be followed by the manipulator, combined with the peripheral actions that support the work cycle. Peripheral actions
Unit VI 1 UNIT VI ROBOT PROGRAMMING A robot program may be defined as a path in space to be followed by the manipulator, combined with the peripheral actions that support the work cycle. Peripheral actions
Neuro-Fuzzy and Soft Computing: Fuzzy Sets. Chapter 1 of Neuro-Fuzzy and Soft Computing by Jang, Sun and Mizutani
 Chapter 1 of Neuro-Fuzzy and Soft Computing by Jang, Sun and Mizutani Outline Introduction Soft Computing (SC) vs. Conventional Artificial Intelligence (AI) Neuro-Fuzzy (NF) and SC Characteristics 2 Introduction
Chapter 1 of Neuro-Fuzzy and Soft Computing by Jang, Sun and Mizutani Outline Introduction Soft Computing (SC) vs. Conventional Artificial Intelligence (AI) Neuro-Fuzzy (NF) and SC Characteristics 2 Introduction
Active Perception for Grasping and Imitation Strategies on Humanoid Robots
 REACTS 2011, Malaga 02. September 2011 Active Perception for Grasping and Imitation Strategies on Humanoid Robots Tamim Asfour Humanoids and Intelligence Systems Lab (Prof. Dillmann) INSTITUTE FOR ANTHROPOMATICS,
REACTS 2011, Malaga 02. September 2011 Active Perception for Grasping and Imitation Strategies on Humanoid Robots Tamim Asfour Humanoids and Intelligence Systems Lab (Prof. Dillmann) INSTITUTE FOR ANTHROPOMATICS,
EXPERIMENTAL BILATERAL CONTROL TELEMANIPULATION USING A VIRTUAL EXOSKELETON
 EXPERIMENTAL BILATERAL CONTROL TELEMANIPULATION USING A VIRTUAL EXOSKELETON Josep Amat 1, Alícia Casals 2, Manel Frigola 2, Enric Martín 2 1Robotics Institute. (IRI) UPC / CSIC Llorens Artigas 4-6, 2a
EXPERIMENTAL BILATERAL CONTROL TELEMANIPULATION USING A VIRTUAL EXOSKELETON Josep Amat 1, Alícia Casals 2, Manel Frigola 2, Enric Martín 2 1Robotics Institute. (IRI) UPC / CSIC Llorens Artigas 4-6, 2a
Reduce, Reuse, Recycle
 Reduce, Reuse, Recycle Performance Activity Materials: Station 1 Consumable none Nonconsumable 1 paper lunch bag an assortment of trash items such as: aluminum foil, 1 plastic straw, 1 craft stick, 1 foam
Reduce, Reuse, Recycle Performance Activity Materials: Station 1 Consumable none Nonconsumable 1 paper lunch bag an assortment of trash items such as: aluminum foil, 1 plastic straw, 1 craft stick, 1 foam
Development of a Personal Service Robot with User-Friendly Interfaces
 Development of a Personal Service Robot with User-Friendly Interfaces Jun Miura, oshiaki Shirai, Nobutaka Shimada, asushi Makihara, Masao Takizawa, and oshio ano Dept. of omputer-ontrolled Mechanical Systems,
Development of a Personal Service Robot with User-Friendly Interfaces Jun Miura, oshiaki Shirai, Nobutaka Shimada, asushi Makihara, Masao Takizawa, and oshio ano Dept. of omputer-ontrolled Mechanical Systems,
CS 378: Autonomous Intelligent Robotics. Instructor: Jivko Sinapov
 CS 378: Autonomous Intelligent Robotics Instructor: Jivko Sinapov http://www.cs.utexas.edu/~jsinapov/teaching/cs378/ Announcements Robotics Study Still going on... Readings for this week Stoytchev, Alexander.
CS 378: Autonomous Intelligent Robotics Instructor: Jivko Sinapov http://www.cs.utexas.edu/~jsinapov/teaching/cs378/ Announcements Robotics Study Still going on... Readings for this week Stoytchev, Alexander.
Mel Spectrum Analysis of Speech Recognition using Single Microphone
 International Journal of Engineering Research in Electronics and Communication Mel Spectrum Analysis of Speech Recognition using Single Microphone [1] Lakshmi S.A, [2] Cholavendan M [1] PG Scholar, Sree
International Journal of Engineering Research in Electronics and Communication Mel Spectrum Analysis of Speech Recognition using Single Microphone [1] Lakshmi S.A, [2] Cholavendan M [1] PG Scholar, Sree
Visual Interpretation of Hand Gestures as a Practical Interface Modality
 Visual Interpretation of Hand Gestures as a Practical Interface Modality Frederik C. M. Kjeldsen Submitted in partial fulfillment of the requirements for the degree of Doctor of Philosophy in the Graduate
Visual Interpretation of Hand Gestures as a Practical Interface Modality Frederik C. M. Kjeldsen Submitted in partial fulfillment of the requirements for the degree of Doctor of Philosophy in the Graduate
Computer Vision. Howie Choset Introduction to Robotics
 Computer Vision Howie Choset http://www.cs.cmu.edu.edu/~choset Introduction to Robotics http://generalrobotics.org What is vision? What is computer vision? Edge Detection Edge Detection Interest points
Computer Vision Howie Choset http://www.cs.cmu.edu.edu/~choset Introduction to Robotics http://generalrobotics.org What is vision? What is computer vision? Edge Detection Edge Detection Interest points