Feel the beat: using cross-modal rhythm to integrate perception of objects, others, and self
|
|
|
- Justin Donald Payne
- 5 years ago
- Views:
Transcription
1 Feel the beat: using cross-modal rhythm to integrate perception of objects, others, and self Paul Fitzpatrick and Artur M. Arsenio CSAIL, MIT
2 Modal and amodal features
3 Modal and amodal features (following Lewkowicz)
4 Motivation Tools and toys are often used in a manner that is composed of some repeated motion - consider hammers, saws, brushes, files, Rhythmic information across the visual and acoustic sensory modalities have complementary properties Features extracted from visual and acoustic processing are what is needed to build an object recognition system
5 Talk Outline Hardware Matching sound and vision Priming for attention Differentiation Integration The self and others
 + periodically generated sound")
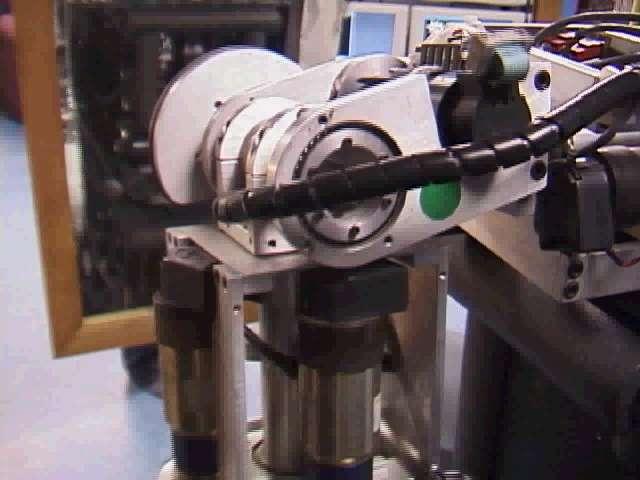
6 Cog s Perceptual System COG S PERCEPTUAL SYSTEM 3 cameras on active vision head microphone array above torso proprioceptive feedback from all joints periodically moving object (hammer) + periodically generated sound (banging) 2 1

7 Interacting with the robot robot


8 Making sense of the senses Bang, Bang! Who is he?
9 Talk Outline Hardware Matching sound and vision Priming for attention Differentiation Integration The self and others
 5-5 -6-7")
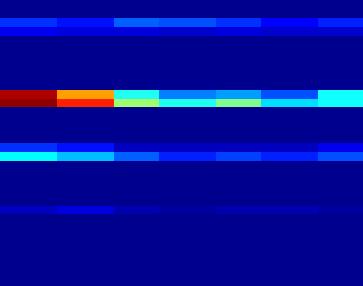
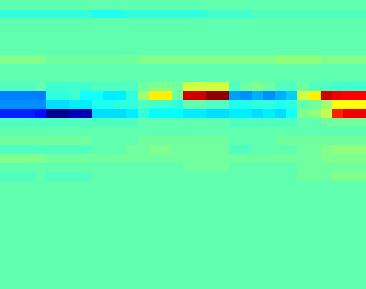
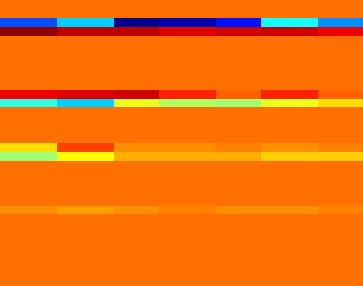
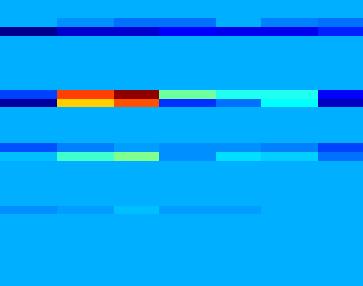
10 Matching sound and vision energy frequency (khz) time (ms) hammer position The sound intensity peaks once per visual period of the hammer (CIRAS 23)
11 Matching algorithm Estimate signal period (histogram technique from CIRAS 23) Cluster rising and falling intervals, guided by the scale of estimated period Merge sufficiently close clusters Segment full periods in the signal

12 Binding Sounds to Toys




 robot")



13 Playing a tambourine Appearance and sound of tambourine are bound together Object Segmentation Sound Segmentation (window divided in 4x4 images) robot sees and hears a tambourine shaking Multiple Object Tracking Cog s view Object Recognition (window divided in 2x2 images) tambourine segmentations

14 Robustness to random visual disturbances to auditory disturbances Person talks sound not matched to object!
15 Talk Outline Hardware Matching sound and vision Priming for attention Priming visual foreground with sound Priming acoustic foreground with vision Matching multiple sources Differentiation Integration The self and others
16 Priming visual foreground with sound One object (the car) making noise Another object (the ball) in view Problem: which object goes with the sound? Solution: Match periods of motion and sound

 2")


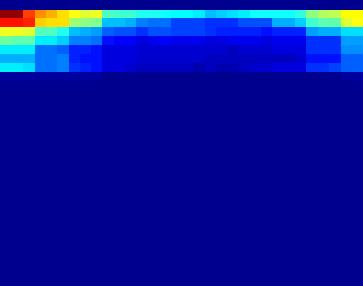
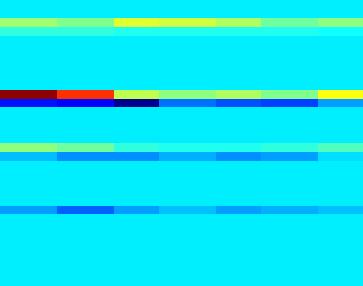
17 Comparing periods 8 car position frequency (khz) time (ms) 2 25 The sound intensity peaks twice per visual period of the car energy ball position


 8")
18 car position Matching with acoustic distraction snake position Sound frequency (khz)
19 Matching multiple sources Two objects making sounds with distinct spectrums Problem: which object goes with which sound? Solution: Match periods of motion and sound

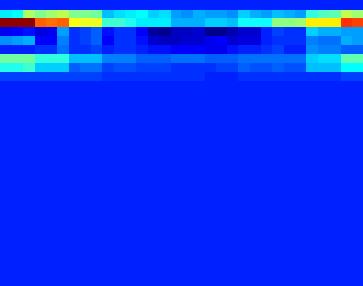
20 Binding periodicity features frequency (khz) rattle position 4 2 car position The sound intensity peaks twice per visual period of the car. For the cube rattle, the sound/visual signals have different ratios according to the frequency bands
21 Cross-modal association errors
22 Talk Outline Hardware Matching sound and vision Priming for attention Differentiation Visual Recognition Sound Recognition Integration The self and others

23 Visual Object Segmentation/Recognition Object Segmentation Object Recognition see Arsenio, MIT PhD thesis, 24 for visual objectsegmentation/recognition
 7 random sound samples for each of 4 objects.")
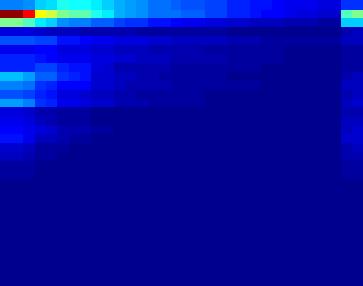
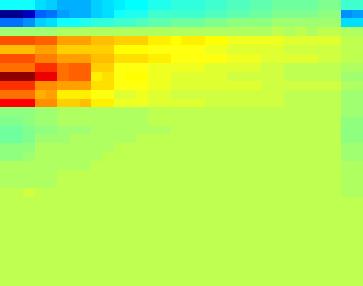
24 Sound Segmentation frequency (khz) Goal: Extract acoustic signatures from repetitive data Problem: STFTs applied for spectral analysis, but not ideal for irregular signals Solution: Build histograms of hypothesized periods Time (msecs) 7 random sound samples for each of 4 objects. From top to bottom: hammer, cube rattle, car and snake rattle, respectively.




25 Sound Recognition khz Normalized time Recognition rate: 82% Average sound images Eigenobjects corresponding to the three highest eigenvalues
26 Talk Outline Hardware Matching sound and vision Priming for attention Differentiation Integration Cross-modal segmentation/recognition Cross-modal enhancement of detection The self and others
")
27 Cross-modal object recognition Causes sound when changing direction after striking object; quiet when changing direction to strike again Causes sound while moving rapidly with wheels spinning; quiet when changing direction Causes sound when changing direction, often quiet during remainder of trajectory (although bells vary)
28 Cross-modal object recognition Log(visual peak energy/acoustic peak energy) 4 2 Car Hammer Cube rattle Snake rattle Crossmodal recognition rate: 92% Log(acoustic period/visual period) Dynamic Programming is applied to match previously segmented sensory signals: visual trajectories to the sound energy signal
29 Cross-modal recognition confusion table
 8 6 4 2")
 frequency (khz) 8")
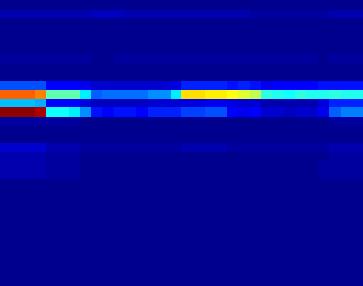
30 Cross-modal enhancement of detection frequency (khz) Signals in Phase time (ms) time (ms) frequency (khz)


 6 8")
31 Signals out of phase! frequency (khz) time (ms) frequency (khz) time (ms) 6 8
32 Talk Outline Hardware Matching sound and vision Priming for attention Differentiation Integration The self and others Learning about people Learning about the self





33 Cross-modal rhythm to integrate perception of Control Experiment others 1 Experiment 2 the robot sees a person shaking head no periodic sound the robot sees a person shaking head and saying no





34 Cross-modal rhythm to integrate perception of others Jumping and clapping Small visual/sound delay gap network delay


35 Binding Sound and Proprioceptive Data visual segmentation detected correlations multiple obj. tracking Detecting ones own rhythms sound segmentation Cog s view object recognition





36 Binding Vision, Sound and Proprioceptive Data Visual image segmented, sound detected, and all bounded to the motion of the arm robot is looking towards its arm as human moves it Video

37 Binding Vision, Sound and Proprioceptive Data visual segmentation detected correlations multiple obj. tracking sound segmentation Cog s view object recognition

38 Cog s mirror image

39 So, how does Cog perceive himself?








40
41 The robot's experience of an event Object Visual Segmentation Detection of cross-modal correlations Multiple Object Tracking Sound Segmentation (window separated on a set of 4x4 images each image contains spectogram over 1 period of the signal) Cog s view Object Recognition (window divided on a set of 2x2 images downloaded from the class assigned to the object)
42 Conclusions Amodal features are key to detecting relationships across senses Useful for learning to recognize an object in different senses (e.g. by its appearance or its sound) There are features for object recognition that exist only in relationships across senses and do not exist in any one sense Useful both for perception of external objects and robot s own body, by incorporating proprioception as another sense
Teaching robots: embodied machine learning strategies for networked robotic applications
 Teaching robots: embodied machine learning strategies for networked robotic applications Artur Arsenio Departamento de Engenharia Informática, Instituto Superior técnico / Universidade Técnica de Lisboa
Teaching robots: embodied machine learning strategies for networked robotic applications Artur Arsenio Departamento de Engenharia Informática, Instituto Superior técnico / Universidade Técnica de Lisboa
Manipulation. Manipulation. Better Vision through Manipulation. Giorgio Metta Paul Fitzpatrick. Humanoid Robotics Group.
 Manipulation Manipulation Better Vision through Manipulation Giorgio Metta Paul Fitzpatrick Humanoid Robotics Group MIT AI Lab Vision & Manipulation In robotics, vision is often used to guide manipulation
Manipulation Manipulation Better Vision through Manipulation Giorgio Metta Paul Fitzpatrick Humanoid Robotics Group MIT AI Lab Vision & Manipulation In robotics, vision is often used to guide manipulation
YDDON. Humans, Robots, & Intelligent Objects New communication approaches
 YDDON Humans, Robots, & Intelligent Objects New communication approaches Building Robot intelligence Interdisciplinarity Turning things into robots www.ydrobotics.co m Edifício A Moagem Cidade do Engenho
YDDON Humans, Robots, & Intelligent Objects New communication approaches Building Robot intelligence Interdisciplinarity Turning things into robots www.ydrobotics.co m Edifício A Moagem Cidade do Engenho
Perception. Read: AIMA Chapter 24 & Chapter HW#8 due today. Vision
 11-25-2013 Perception Vision Read: AIMA Chapter 24 & Chapter 25.3 HW#8 due today visual aural haptic & tactile vestibular (balance: equilibrium, acceleration, and orientation wrt gravity) olfactory taste
11-25-2013 Perception Vision Read: AIMA Chapter 24 & Chapter 25.3 HW#8 due today visual aural haptic & tactile vestibular (balance: equilibrium, acceleration, and orientation wrt gravity) olfactory taste
Perception and Perspective in Robotics
 Perception and Perspective in Robotics Paul Fitzpatrick MIT CSAIL USA experimentation helps perception Rachel: We have got to find out if [ugly naked guy]'s alive. Monica: How are we going to do that?
Perception and Perspective in Robotics Paul Fitzpatrick MIT CSAIL USA experimentation helps perception Rachel: We have got to find out if [ugly naked guy]'s alive. Monica: How are we going to do that?
Learning the Proprioceptive and Acoustic Properties of Household Objects. Jivko Sinapov Willow Collaborators: Kaijen and Radu 6/24/2010
 Learning the Proprioceptive and Acoustic Properties of Household Objects Jivko Sinapov Willow Collaborators: Kaijen and Radu 6/24/2010 What is Proprioception? It is the sense that indicates whether the
Learning the Proprioceptive and Acoustic Properties of Household Objects Jivko Sinapov Willow Collaborators: Kaijen and Radu 6/24/2010 What is Proprioception? It is the sense that indicates whether the
Toward Automatic Transcription -- Pitch Tracking In Polyphonic Environment
 Toward Automatic Transcription -- Pitch Tracking In Polyphonic Environment Term Project Presentation By: Keerthi C Nagaraj Dated: 30th April 2003 Outline Introduction Background problems in polyphonic
Toward Automatic Transcription -- Pitch Tracking In Polyphonic Environment Term Project Presentation By: Keerthi C Nagaraj Dated: 30th April 2003 Outline Introduction Background problems in polyphonic
Humanoid robot. Honda's ASIMO, an example of a humanoid robot
 Humanoid robot Honda's ASIMO, an example of a humanoid robot A humanoid robot is a robot with its overall appearance based on that of the human body, allowing interaction with made-for-human tools or environments.
Humanoid robot Honda's ASIMO, an example of a humanoid robot A humanoid robot is a robot with its overall appearance based on that of the human body, allowing interaction with made-for-human tools or environments.
Salient features make a search easy
 Chapter General discussion This thesis examined various aspects of haptic search. It consisted of three parts. In the first part, the saliency of movability and compliance were investigated. In the second
Chapter General discussion This thesis examined various aspects of haptic search. It consisted of three parts. In the first part, the saliency of movability and compliance were investigated. In the second
Auditory System For a Mobile Robot
 Auditory System For a Mobile Robot PhD Thesis Jean-Marc Valin Department of Electrical Engineering and Computer Engineering Université de Sherbrooke, Québec, Canada Jean-Marc.Valin@USherbrooke.ca Motivations
Auditory System For a Mobile Robot PhD Thesis Jean-Marc Valin Department of Electrical Engineering and Computer Engineering Université de Sherbrooke, Québec, Canada Jean-Marc.Valin@USherbrooke.ca Motivations
Integrated Vision and Sound Localization
 Integrated Vision and Sound Localization Parham Aarabi Safwat Zaky Department of Electrical and Computer Engineering University of Toronto 10 Kings College Road, Toronto, Ontario, Canada, M5S 3G4 parham@stanford.edu
Integrated Vision and Sound Localization Parham Aarabi Safwat Zaky Department of Electrical and Computer Engineering University of Toronto 10 Kings College Road, Toronto, Ontario, Canada, M5S 3G4 parham@stanford.edu
Separation and Recognition of multiple sound source using Pulsed Neuron Model
 Separation and Recognition of multiple sound source using Pulsed Neuron Model Kaname Iwasa, Hideaki Inoue, Mauricio Kugler, Susumu Kuroyanagi, Akira Iwata Nagoya Institute of Technology, Gokiso-cho, Showa-ku,
Separation and Recognition of multiple sound source using Pulsed Neuron Model Kaname Iwasa, Hideaki Inoue, Mauricio Kugler, Susumu Kuroyanagi, Akira Iwata Nagoya Institute of Technology, Gokiso-cho, Showa-ku,
Monaural and Binaural Speech Separation
 Monaural and Binaural Speech Separation DeLiang Wang Perception & Neurodynamics Lab The Ohio State University Outline of presentation Introduction CASA approach to sound separation Ideal binary mask as
Monaural and Binaural Speech Separation DeLiang Wang Perception & Neurodynamics Lab The Ohio State University Outline of presentation Introduction CASA approach to sound separation Ideal binary mask as
Speech and Music Discrimination based on Signal Modulation Spectrum.
 Speech and Music Discrimination based on Signal Modulation Spectrum. Pavel Balabko June 24, 1999 1 Introduction. This work is devoted to the problem of automatic speech and music discrimination. As we
Speech and Music Discrimination based on Signal Modulation Spectrum. Pavel Balabko June 24, 1999 1 Introduction. This work is devoted to the problem of automatic speech and music discrimination. As we
Preeti Rao 2 nd CompMusicWorkshop, Istanbul 2012
 Preeti Rao 2 nd CompMusicWorkshop, Istanbul 2012 o Music signal characteristics o Perceptual attributes and acoustic properties o Signal representations for pitch detection o STFT o Sinusoidal model o
Preeti Rao 2 nd CompMusicWorkshop, Istanbul 2012 o Music signal characteristics o Perceptual attributes and acoustic properties o Signal representations for pitch detection o STFT o Sinusoidal model o
Imaging Process (review)
") Color Used heavily in human vision Color is a pixel property, making some recognition problems easy Visible spectrum for humans is 400nm (blue) to 700 nm (red) Machines can see much more; ex. X-rays, infrared,
Color Used heavily in human vision Color is a pixel property, making some recognition problems easy Visible spectrum for humans is 400nm (blue) to 700 nm (red) Machines can see much more; ex. X-rays, infrared,
Music. Fill their world with rhythm, improve social and emotional well-being.
 86 87 Fill their world with rhythm, improve social and emotional well-being. 88 6423 Rhythm Box 3y+ 6427 Rain Maker 18m+ Turn this Rain Maker over and hear sounds of the tranquil rainfall. Combine with
86 87 Fill their world with rhythm, improve social and emotional well-being. 88 6423 Rhythm Box 3y+ 6427 Rain Maker 18m+ Turn this Rain Maker over and hear sounds of the tranquil rainfall. Combine with
ARTIFICIAL INTELLIGENCE - ROBOTICS
 ARTIFICIAL INTELLIGENCE - ROBOTICS http://www.tutorialspoint.com/artificial_intelligence/artificial_intelligence_robotics.htm Copyright tutorialspoint.com Robotics is a domain in artificial intelligence
ARTIFICIAL INTELLIGENCE - ROBOTICS http://www.tutorialspoint.com/artificial_intelligence/artificial_intelligence_robotics.htm Copyright tutorialspoint.com Robotics is a domain in artificial intelligence
A developmental approach to grasping
 A developmental approach to grasping Lorenzo Natale, Giorgio Metta and Giulio Sandini LIRA-Lab, DIST, University of Genoa Viale Causa 13, 16145, Genova Italy email: {nat, pasa, sandini}@liralab.it Abstract
A developmental approach to grasping Lorenzo Natale, Giorgio Metta and Giulio Sandini LIRA-Lab, DIST, University of Genoa Viale Causa 13, 16145, Genova Italy email: {nat, pasa, sandini}@liralab.it Abstract
EE631 Cooperating Autonomous Mobile Robots. Lecture 1: Introduction. Prof. Yi Guo ECE Department
 EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
Multi-Modal User Interaction
 Multi-Modal User Interaction Lecture 4: Multiple Modalities Zheng-Hua Tan Department of Electronic Systems Aalborg University, Denmark zt@es.aau.dk MMUI, IV, Zheng-Hua Tan 1 Outline Multimodal interface
Multi-Modal User Interaction Lecture 4: Multiple Modalities Zheng-Hua Tan Department of Electronic Systems Aalborg University, Denmark zt@es.aau.dk MMUI, IV, Zheng-Hua Tan 1 Outline Multimodal interface
Speech/Music Change Point Detection using Sonogram and AANN
 International Journal of Information & Computation Technology. ISSN 0974-2239 Volume 6, Number 1 (2016), pp. 45-49 International Research Publications House http://www. irphouse.com Speech/Music Change
International Journal of Information & Computation Technology. ISSN 0974-2239 Volume 6, Number 1 (2016), pp. 45-49 International Research Publications House http://www. irphouse.com Speech/Music Change
Years 5 and 6 standard elaborations Australian Curriculum: Dance
 Purpose Structure The standard elaborations (SEs) provide additional clarity when using the Australian Curriculum achievement standard to make judgments on a five-point scale. These can be used as a tool
Purpose Structure The standard elaborations (SEs) provide additional clarity when using the Australian Curriculum achievement standard to make judgments on a five-point scale. These can be used as a tool
BEAT DETECTION BY DYNAMIC PROGRAMMING. Racquel Ivy Awuor
 BEAT DETECTION BY DYNAMIC PROGRAMMING Racquel Ivy Awuor University of Rochester Department of Electrical and Computer Engineering Rochester, NY 14627 rawuor@ur.rochester.edu ABSTRACT A beat is a salient
BEAT DETECTION BY DYNAMIC PROGRAMMING Racquel Ivy Awuor University of Rochester Department of Electrical and Computer Engineering Rochester, NY 14627 rawuor@ur.rochester.edu ABSTRACT A beat is a salient
Industrial Imaging Today & Tomorrow AIA 2016 The Vision Show. Steve Varga, Procter & Gamble
 Industrial Imaging Today & Tomorrow AIA 2016 The Vision Show Steve Varga, Procter & Gamble Steve Varga varga.sm@pg.com Next big breakthroughs Procter & Gamble Countries of Operations ~70 Countries Where
Industrial Imaging Today & Tomorrow AIA 2016 The Vision Show Steve Varga, Procter & Gamble Steve Varga varga.sm@pg.com Next big breakthroughs Procter & Gamble Countries of Operations ~70 Countries Where
THE HUMANISATION OF STOCHASTIC PROCESSES FOR THE MODELLING OF F0 DRIFT IN SINGING
 THE HUMANISATION OF STOCHASTIC PROCESSES FOR THE MODELLING OF F0 DRIFT IN SINGING Ryan Stables [1], Dr. Jamie Bullock [2], Dr. Cham Athwal [3] [1] Institute of Digital Experience, Birmingham City University,
THE HUMANISATION OF STOCHASTIC PROCESSES FOR THE MODELLING OF F0 DRIFT IN SINGING Ryan Stables [1], Dr. Jamie Bullock [2], Dr. Cham Athwal [3] [1] Institute of Digital Experience, Birmingham City University,
Evolving Robot Empathy through the Generation of Artificial Pain in an Adaptive Self-Awareness Framework for Human-Robot Collaborative Tasks
 Evolving Robot Empathy through the Generation of Artificial Pain in an Adaptive Self-Awareness Framework for Human-Robot Collaborative Tasks Muh Anshar Faculty of Engineering and Information Technology
Evolving Robot Empathy through the Generation of Artificial Pain in an Adaptive Self-Awareness Framework for Human-Robot Collaborative Tasks Muh Anshar Faculty of Engineering and Information Technology
Mel Spectrum Analysis of Speech Recognition using Single Microphone
 International Journal of Engineering Research in Electronics and Communication Mel Spectrum Analysis of Speech Recognition using Single Microphone [1] Lakshmi S.A, [2] Cholavendan M [1] PG Scholar, Sree
International Journal of Engineering Research in Electronics and Communication Mel Spectrum Analysis of Speech Recognition using Single Microphone [1] Lakshmi S.A, [2] Cholavendan M [1] PG Scholar, Sree
Speech Enhancement Based On Spectral Subtraction For Speech Recognition System With Dpcm
 International OPEN ACCESS Journal Of Modern Engineering Research (IJMER) Speech Enhancement Based On Spectral Subtraction For Speech Recognition System With Dpcm A.T. Rajamanickam, N.P.Subiramaniyam, A.Balamurugan*,
International OPEN ACCESS Journal Of Modern Engineering Research (IJMER) Speech Enhancement Based On Spectral Subtraction For Speech Recognition System With Dpcm A.T. Rajamanickam, N.P.Subiramaniyam, A.Balamurugan*,
Visual Interpretation of Hand Gestures as a Practical Interface Modality
 Visual Interpretation of Hand Gestures as a Practical Interface Modality Frederik C. M. Kjeldsen Submitted in partial fulfillment of the requirements for the degree of Doctor of Philosophy in the Graduate
Visual Interpretation of Hand Gestures as a Practical Interface Modality Frederik C. M. Kjeldsen Submitted in partial fulfillment of the requirements for the degree of Doctor of Philosophy in the Graduate
Social Interaction and the Development of Artificial Consciousness
 Artur M. Arsenio IHSIS - Institute for Human Studies and Intelligence Sciences Instituto Superior Técnico / Universidade Técnica de Lisboa, Portugal Luisa G. Caldas IHSIS - Institute for Human Studies
Artur M. Arsenio IHSIS - Institute for Human Studies and Intelligence Sciences Instituto Superior Técnico / Universidade Técnica de Lisboa, Portugal Luisa G. Caldas IHSIS - Institute for Human Studies
MIST A Musical Interactive Space for Therapy
 MIST A Musical Interactive Space for Therapy INSTRUCTION MANUAL 1.0 GENERAL INFORMATION 1.1 System Overview The software runs on Mac requires 2 GB RAM and 500 MB of available disc space. A Microsoft Kinect
MIST A Musical Interactive Space for Therapy INSTRUCTION MANUAL 1.0 GENERAL INFORMATION 1.1 System Overview The software runs on Mac requires 2 GB RAM and 500 MB of available disc space. A Microsoft Kinect
Service Robots in an Intelligent House
 Service Robots in an Intelligent House Jesus Savage Bio-Robotics Laboratory biorobotics.fi-p.unam.mx School of Engineering Autonomous National University of Mexico UNAM 2017 OUTLINE Introduction A System
Service Robots in an Intelligent House Jesus Savage Bio-Robotics Laboratory biorobotics.fi-p.unam.mx School of Engineering Autonomous National University of Mexico UNAM 2017 OUTLINE Introduction A System
Graz University of Technology (Austria)
") Graz University of Technology (Austria) I am in charge of the Vision Based Measurement Group at Graz University of Technology. The research group is focused on two main areas: Object Category Recognition
Graz University of Technology (Austria) I am in charge of the Vision Based Measurement Group at Graz University of Technology. The research group is focused on two main areas: Object Category Recognition
HRTF adaptation and pattern learning
 HRTF adaptation and pattern learning FLORIAN KLEIN * AND STEPHAN WERNER Electronic Media Technology Lab, Institute for Media Technology, Technische Universität Ilmenau, D-98693 Ilmenau, Germany The human
HRTF adaptation and pattern learning FLORIAN KLEIN * AND STEPHAN WERNER Electronic Media Technology Lab, Institute for Media Technology, Technische Universität Ilmenau, D-98693 Ilmenau, Germany The human
Paper Body Vibration Effects on Perceived Reality with Multi-modal Contents
 ITE Trans. on MTA Vol. 2, No. 1, pp. 46-5 (214) Copyright 214 by ITE Transactions on Media Technology and Applications (MTA) Paper Body Vibration Effects on Perceived Reality with Multi-modal Contents
ITE Trans. on MTA Vol. 2, No. 1, pp. 46-5 (214) Copyright 214 by ITE Transactions on Media Technology and Applications (MTA) Paper Body Vibration Effects on Perceived Reality with Multi-modal Contents
Enhancing 3D Audio Using Blind Bandwidth Extension
 Enhancing 3D Audio Using Blind Bandwidth Extension (PREPRINT) Tim Habigt, Marko Ðurković, Martin Rothbucher, and Klaus Diepold Institute for Data Processing, Technische Universität München, 829 München,
Enhancing 3D Audio Using Blind Bandwidth Extension (PREPRINT) Tim Habigt, Marko Ðurković, Martin Rothbucher, and Klaus Diepold Institute for Data Processing, Technische Universität München, 829 München,
Evaluating the stability of SIFT keypoints across cameras
 Evaluating the stability of SIFT keypoints across cameras Max Van Kleek Agent-based Intelligent Reactive Environments MIT CSAIL emax@csail.mit.edu ABSTRACT Object identification using Scale-Invariant Feature
Evaluating the stability of SIFT keypoints across cameras Max Van Kleek Agent-based Intelligent Reactive Environments MIT CSAIL emax@csail.mit.edu ABSTRACT Object identification using Scale-Invariant Feature
Image processing & Computer vision Xử lí ảnh và thị giác máy tính
 Image processing & Computer vision Xử lí ảnh và thị giác máy tính Color Alain Boucher - IFI Introduction To be able to see objects and a scene, we need light Otherwise, everything is black How does behave
Image processing & Computer vision Xử lí ảnh và thị giác máy tính Color Alain Boucher - IFI Introduction To be able to see objects and a scene, we need light Otherwise, everything is black How does behave
EXPERIMENTAL BILATERAL CONTROL TELEMANIPULATION USING A VIRTUAL EXOSKELETON
 EXPERIMENTAL BILATERAL CONTROL TELEMANIPULATION USING A VIRTUAL EXOSKELETON Josep Amat 1, Alícia Casals 2, Manel Frigola 2, Enric Martín 2 1Robotics Institute. (IRI) UPC / CSIC Llorens Artigas 4-6, 2a
EXPERIMENTAL BILATERAL CONTROL TELEMANIPULATION USING A VIRTUAL EXOSKELETON Josep Amat 1, Alícia Casals 2, Manel Frigola 2, Enric Martín 2 1Robotics Institute. (IRI) UPC / CSIC Llorens Artigas 4-6, 2a
Rhythmic Similarity -- a quick paper review. Presented by: Shi Yong March 15, 2007 Music Technology, McGill University
 Rhythmic Similarity -- a quick paper review Presented by: Shi Yong March 15, 2007 Music Technology, McGill University Contents Introduction Three examples J. Foote 2001, 2002 J. Paulus 2002 S. Dixon 2004
Rhythmic Similarity -- a quick paper review Presented by: Shi Yong March 15, 2007 Music Technology, McGill University Contents Introduction Three examples J. Foote 2001, 2002 J. Paulus 2002 S. Dixon 2004
The Whole World in Your Hand: Active and Interactive Segmentation
 The Whole World in Your Hand: Active and Interactive Segmentation Artur Arsenio Paul Fitzpatrick Charles C. Kemp Giorgio Metta 1 MIT AI Lab Cambridge, Massachusetts, USA Lira Lab, DIST, University of Genova
The Whole World in Your Hand: Active and Interactive Segmentation Artur Arsenio Paul Fitzpatrick Charles C. Kemp Giorgio Metta 1 MIT AI Lab Cambridge, Massachusetts, USA Lira Lab, DIST, University of Genova
A Robust Neural Robot Navigation Using a Combination of Deliberative and Reactive Control Architectures
 A Robust Neural Robot Navigation Using a Combination of Deliberative and Reactive Control Architectures D.M. Rojas Castro, A. Revel and M. Ménard * Laboratory of Informatics, Image and Interaction (L3I)
A Robust Neural Robot Navigation Using a Combination of Deliberative and Reactive Control Architectures D.M. Rojas Castro, A. Revel and M. Ménard * Laboratory of Informatics, Image and Interaction (L3I)
Single Chip for Imaging, Color Segmentation, Histogramming and Pattern Matching
 Paper Title: Single Chip for Imaging, Color Segmentation, Histogramming and Pattern Matching Authors: Ralph Etienne-Cummings 1,2, Philippe Pouliquen 1,2, M. Anthony Lewis 1 Affiliation: 1 Iguana Robotics,
Paper Title: Single Chip for Imaging, Color Segmentation, Histogramming and Pattern Matching Authors: Ralph Etienne-Cummings 1,2, Philippe Pouliquen 1,2, M. Anthony Lewis 1 Affiliation: 1 Iguana Robotics,
Rhythm Analysis in Music
 Rhythm Analysis in Music EECS 352: Machine Perception of Music & Audio Zafar Rafii, Winter 24 Some Definitions Rhythm movement marked by the regulated succession of strong and weak elements, or of opposite
Rhythm Analysis in Music EECS 352: Machine Perception of Music & Audio Zafar Rafii, Winter 24 Some Definitions Rhythm movement marked by the regulated succession of strong and weak elements, or of opposite
Background. Computer Vision & Digital Image Processing. Improved Bartlane transmitted image. Example Bartlane transmitted image
 Background Computer Vision & Digital Image Processing Introduction to Digital Image Processing Interest comes from two primary backgrounds Improvement of pictorial information for human perception How
Background Computer Vision & Digital Image Processing Introduction to Digital Image Processing Interest comes from two primary backgrounds Improvement of pictorial information for human perception How
VIRTUAL REALITY Introduction. Emil M. Petriu SITE, University of Ottawa
 VIRTUAL REALITY Introduction Emil M. Petriu SITE, University of Ottawa Natural and Virtual Reality Virtual Reality Interactive Virtual Reality Virtualized Reality Augmented Reality HUMAN PERCEPTION OF
VIRTUAL REALITY Introduction Emil M. Petriu SITE, University of Ottawa Natural and Virtual Reality Virtual Reality Interactive Virtual Reality Virtualized Reality Augmented Reality HUMAN PERCEPTION OF
Research on Extracting BPM Feature Values in Music Beat Tracking Algorithm
 Research on Extracting BPM Feature Values in Music Beat Tracking Algorithm Yan Zhao * Hainan Tropical Ocean University, Sanya, China *Corresponding author(e-mail: yanzhao16@163.com) Abstract With the rapid
Research on Extracting BPM Feature Values in Music Beat Tracking Algorithm Yan Zhao * Hainan Tropical Ocean University, Sanya, China *Corresponding author(e-mail: yanzhao16@163.com) Abstract With the rapid
Chapter 3 Part 2 Color image processing
 Chapter 3 Part 2 Color image processing Motivation Color fundamentals Color models Pseudocolor image processing Full-color image processing: Component-wise Vector-based Recent and current work Spring 2002
Chapter 3 Part 2 Color image processing Motivation Color fundamentals Color models Pseudocolor image processing Full-color image processing: Component-wise Vector-based Recent and current work Spring 2002
Elements of Art and Principles of Design. Drawing I- Course Instructor: Dr. Brown
 Elements of Art and Principles of Design Drawing I- Course 0104340 Instructor: Dr. Brown Objectives Students will: Define Composition Be able to list the Elements of Art Be able to identify the Primary
Elements of Art and Principles of Design Drawing I- Course 0104340 Instructor: Dr. Brown Objectives Students will: Define Composition Be able to list the Elements of Art Be able to identify the Primary
PARAMETER IDENTIFICATION IN RADIO FREQUENCY COMMUNICATIONS
 Review of the Air Force Academy No 3 (27) 2014 PARAMETER IDENTIFICATION IN RADIO FREQUENCY COMMUNICATIONS Marius-Alin BELU Military Technical Academy, Bucharest Abstract: Modulation detection is an essential
Review of the Air Force Academy No 3 (27) 2014 PARAMETER IDENTIFICATION IN RADIO FREQUENCY COMMUNICATIONS Marius-Alin BELU Military Technical Academy, Bucharest Abstract: Modulation detection is an essential
A Responsive Vision System to Support Human-Robot Interaction
 A Responsive Vision System to Support Human-Robot Interaction Bruce A. Maxwell, Brian M. Leighton, and Leah R. Perlmutter Colby College {bmaxwell, bmleight, lrperlmu}@colby.edu Abstract Humanoid robots
A Responsive Vision System to Support Human-Robot Interaction Bruce A. Maxwell, Brian M. Leighton, and Leah R. Perlmutter Colby College {bmaxwell, bmleight, lrperlmu}@colby.edu Abstract Humanoid robots
Learning to Order Objects using Haptic and Proprioceptive Exploratory Behaviors
 Learning to Order Objects using Haptic and Proprioceptive Exploratory Behaviors Jivko Sinapov, Priyanka Khante, Maxwell Svetlik, and Peter Stone Department of Computer Science University of Texas at Austin,
Learning to Order Objects using Haptic and Proprioceptive Exploratory Behaviors Jivko Sinapov, Priyanka Khante, Maxwell Svetlik, and Peter Stone Department of Computer Science University of Texas at Austin,
A Computational Efficient Method for Assuring Full Duplex Feeling in Hands-free Communication
 A Computational Efficient Method for Assuring Full Duplex Feeling in Hands-free Communication FREDRIC LINDSTRÖM 1, MATTIAS DAHL, INGVAR CLAESSON Department of Signal Processing Blekinge Institute of Technology
A Computational Efficient Method for Assuring Full Duplex Feeling in Hands-free Communication FREDRIC LINDSTRÖM 1, MATTIAS DAHL, INGVAR CLAESSON Department of Signal Processing Blekinge Institute of Technology
S.P.Q.R. Legged Team Report from RoboCup 2003
 S.P.Q.R. Legged Team Report from RoboCup 2003 L. Iocchi and D. Nardi Dipartimento di Informatica e Sistemistica Universitá di Roma La Sapienza Via Salaria 113-00198 Roma, Italy {iocchi,nardi}@dis.uniroma1.it,
S.P.Q.R. Legged Team Report from RoboCup 2003 L. Iocchi and D. Nardi Dipartimento di Informatica e Sistemistica Universitá di Roma La Sapienza Via Salaria 113-00198 Roma, Italy {iocchi,nardi}@dis.uniroma1.it,
REpeating Pattern Extraction Technique (REPET)
") REpeating Pattern Extraction Technique (REPET) EECS 32: Machine Perception of Music & Audio Zafar RAFII, Spring 22 Repetition Repetition is a fundamental element in generating and perceiving structure
REpeating Pattern Extraction Technique (REPET) EECS 32: Machine Perception of Music & Audio Zafar RAFII, Spring 22 Repetition Repetition is a fundamental element in generating and perceiving structure
Humanoid Robotics (TIF 160)
") Humanoid Robotics (TIF 160) Lecture 1, 20100831 Introduction and motivation to humanoid robotics What will you learn? (Aims) Basic facts about humanoid robots Kinematics (and dynamics) of humanoid robots
Humanoid Robotics (TIF 160) Lecture 1, 20100831 Introduction and motivation to humanoid robotics What will you learn? (Aims) Basic facts about humanoid robots Kinematics (and dynamics) of humanoid robots
AUGMENTED VIRTUAL REALITY APPLICATIONS IN MANUFACTURING
 6 th INTERNATIONAL MULTIDISCIPLINARY CONFERENCE AUGMENTED VIRTUAL REALITY APPLICATIONS IN MANUFACTURING Peter Brázda, Jozef Novák-Marcinčin, Faculty of Manufacturing Technologies, TU Košice Bayerova 1,
6 th INTERNATIONAL MULTIDISCIPLINARY CONFERENCE AUGMENTED VIRTUAL REALITY APPLICATIONS IN MANUFACTURING Peter Brázda, Jozef Novák-Marcinčin, Faculty of Manufacturing Technologies, TU Košice Bayerova 1,
Drum Transcription Based on Independent Subspace Analysis
 Report for EE 391 Special Studies and Reports for Electrical Engineering Drum Transcription Based on Independent Subspace Analysis Yinyi Guo Center for Computer Research in Music and Acoustics, Stanford,
Report for EE 391 Special Studies and Reports for Electrical Engineering Drum Transcription Based on Independent Subspace Analysis Yinyi Guo Center for Computer Research in Music and Acoustics, Stanford,
E90 Project Proposal. 6 December 2006 Paul Azunre Thomas Murray David Wright
 E90 Project Proposal 6 December 2006 Paul Azunre Thomas Murray David Wright Table of Contents Abstract 3 Introduction..4 Technical Discussion...4 Tracking Input..4 Haptic Feedack.6 Project Implementation....7
E90 Project Proposal 6 December 2006 Paul Azunre Thomas Murray David Wright Table of Contents Abstract 3 Introduction..4 Technical Discussion...4 Tracking Input..4 Haptic Feedack.6 Project Implementation....7
Intelligent Robotics Sensors and Actuators
 Intelligent Robotics Sensors and Actuators Luís Paulo Reis (University of Porto) Nuno Lau (University of Aveiro) The Perception Problem Do we need perception? Complexity Uncertainty Dynamic World Detection/Correction
Intelligent Robotics Sensors and Actuators Luís Paulo Reis (University of Porto) Nuno Lau (University of Aveiro) The Perception Problem Do we need perception? Complexity Uncertainty Dynamic World Detection/Correction
WB2306 The Human Controller
 Simulation WB2306 The Human Controller Class 1. General Introduction Adapt the device to the human, not the human to the device! Teacher: David ABBINK Assistant professor at Delft Haptics Lab (www.delfthapticslab.nl)
Simulation WB2306 The Human Controller Class 1. General Introduction Adapt the device to the human, not the human to the device! Teacher: David ABBINK Assistant professor at Delft Haptics Lab (www.delfthapticslab.nl)
Sensors & Systems for Human Safety Assurance in Collaborative Exploration
 Sensing and Sensors CMU SCS RI 16-722 S09 Ned Fox nfox@andrew.cmu.edu Outline What is collaborative exploration? Humans sensing robots Robots sensing humans Overseers sensing both Inherently safe systems
Sensing and Sensors CMU SCS RI 16-722 S09 Ned Fox nfox@andrew.cmu.edu Outline What is collaborative exploration? Humans sensing robots Robots sensing humans Overseers sensing both Inherently safe systems
Real-time beat estimation using feature extraction
 Real-time beat estimation using feature extraction Kristoffer Jensen and Tue Haste Andersen Department of Computer Science, University of Copenhagen Universitetsparken 1 DK-2100 Copenhagen, Denmark, {krist,haste}@diku.dk,
Real-time beat estimation using feature extraction Kristoffer Jensen and Tue Haste Andersen Department of Computer Science, University of Copenhagen Universitetsparken 1 DK-2100 Copenhagen, Denmark, {krist,haste}@diku.dk,
Sensing and Perception
 Unit D tion Exploring Robotics Spring, 2013 D.1 Why does a robot need sensors? the environment is complex the environment is dynamic enable the robot to learn about current conditions in its environment.
Unit D tion Exploring Robotics Spring, 2013 D.1 Why does a robot need sensors? the environment is complex the environment is dynamic enable the robot to learn about current conditions in its environment.
NTU Robot PAL 2009 Team Report
 NTU Robot PAL 2009 Team Report Chieh-Chih Wang, Shao-Chen Wang, Hsiao-Chieh Yen, and Chun-Hua Chang The Robot Perception and Learning Laboratory Department of Computer Science and Information Engineering
NTU Robot PAL 2009 Team Report Chieh-Chih Wang, Shao-Chen Wang, Hsiao-Chieh Yen, and Chun-Hua Chang The Robot Perception and Learning Laboratory Department of Computer Science and Information Engineering
INFLUENCE OF FREQUENCY DISTRIBUTION ON INTENSITY FLUCTUATIONS OF NOISE
 INFLUENCE OF FREQUENCY DISTRIBUTION ON INTENSITY FLUCTUATIONS OF NOISE Pierre HANNA SCRIME - LaBRI Université de Bordeaux 1 F-33405 Talence Cedex, France hanna@labriu-bordeauxfr Myriam DESAINTE-CATHERINE
INFLUENCE OF FREQUENCY DISTRIBUTION ON INTENSITY FLUCTUATIONS OF NOISE Pierre HANNA SCRIME - LaBRI Université de Bordeaux 1 F-33405 Talence Cedex, France hanna@labriu-bordeauxfr Myriam DESAINTE-CATHERINE
Tapping into Touch. Eduardo Torres-Jara Lorenzo Natale Paul Fitzpatrick
 Berthouze, L., Kaplan, F., Kozima, H., Yano, H., Konczak, J., Metta, G., Nadel, J., Sandini, G., Stojanov, G. and Balkenius, C. (Eds.) Proceedings of the Fifth International Workshop on Epigenetic Robotics:
Berthouze, L., Kaplan, F., Kozima, H., Yano, H., Konczak, J., Metta, G., Nadel, J., Sandini, G., Stojanov, G. and Balkenius, C. (Eds.) Proceedings of the Fifth International Workshop on Epigenetic Robotics:
Sound rendering in Interactive Multimodal Systems. Federico Avanzini
 Sound rendering in Interactive Multimodal Systems Federico Avanzini Background Outline Ecological Acoustics Multimodal perception Auditory visual rendering of egocentric distance Binaural sound Auditory
Sound rendering in Interactive Multimodal Systems Federico Avanzini Background Outline Ecological Acoustics Multimodal perception Auditory visual rendering of egocentric distance Binaural sound Auditory
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute (6 pts )A 2-DOF manipulator arm is attached to a mobile base with non-holonomic
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute (6 pts )A 2-DOF manipulator arm is attached to a mobile base with non-holonomic
MECHANICAL DESIGN LEARNING ENVIRONMENTS BASED ON VIRTUAL REALITY TECHNOLOGIES
 INTERNATIONAL CONFERENCE ON ENGINEERING AND PRODUCT DESIGN EDUCATION 4 & 5 SEPTEMBER 2008, UNIVERSITAT POLITECNICA DE CATALUNYA, BARCELONA, SPAIN MECHANICAL DESIGN LEARNING ENVIRONMENTS BASED ON VIRTUAL
INTERNATIONAL CONFERENCE ON ENGINEERING AND PRODUCT DESIGN EDUCATION 4 & 5 SEPTEMBER 2008, UNIVERSITAT POLITECNICA DE CATALUNYA, BARCELONA, SPAIN MECHANICAL DESIGN LEARNING ENVIRONMENTS BASED ON VIRTUAL
ROOM AND CONCERT HALL ACOUSTICS MEASUREMENTS USING ARRAYS OF CAMERAS AND MICROPHONES
 ROOM AND CONCERT HALL ACOUSTICS The perception of sound by human listeners in a listening space, such as a room or a concert hall is a complicated function of the type of source sound (speech, oration,
ROOM AND CONCERT HALL ACOUSTICS The perception of sound by human listeners in a listening space, such as a room or a concert hall is a complicated function of the type of source sound (speech, oration,
RESEARCH ON METHODS FOR ANALYZING AND PROCESSING SIGNALS USED BY INTERCEPTION SYSTEMS WITH SPECIAL APPLICATIONS
 Abstract of Doctorate Thesis RESEARCH ON METHODS FOR ANALYZING AND PROCESSING SIGNALS USED BY INTERCEPTION SYSTEMS WITH SPECIAL APPLICATIONS PhD Coordinator: Prof. Dr. Eng. Radu MUNTEANU Author: Radu MITRAN
Abstract of Doctorate Thesis RESEARCH ON METHODS FOR ANALYZING AND PROCESSING SIGNALS USED BY INTERCEPTION SYSTEMS WITH SPECIAL APPLICATIONS PhD Coordinator: Prof. Dr. Eng. Radu MUNTEANU Author: Radu MITRAN
Complex Continuous Meaningful Humanoid Interaction: A Multi Sensory-Cue Based Approach
 Complex Continuous Meaningful Humanoid Interaction: A Multi Sensory-Cue Based Approach Gordon Cheng Humanoid Interaction Laboratory Intelligent Systems Division Electrotechnical Laboratory Tsukuba, Ibaraki,
Complex Continuous Meaningful Humanoid Interaction: A Multi Sensory-Cue Based Approach Gordon Cheng Humanoid Interaction Laboratory Intelligent Systems Division Electrotechnical Laboratory Tsukuba, Ibaraki,
Nonuniform multi level crossing for signal reconstruction
 6 Nonuniform multi level crossing for signal reconstruction 6.1 Introduction In recent years, there has been considerable interest in level crossing algorithms for sampling continuous time signals. Driven
6 Nonuniform multi level crossing for signal reconstruction 6.1 Introduction In recent years, there has been considerable interest in level crossing algorithms for sampling continuous time signals. Driven
Sensing. Autonomous systems. Properties. Classification. Key requirement of autonomous systems. An AS should be connected to the outside world.
 Sensing Key requirement of autonomous systems. An AS should be connected to the outside world. Autonomous systems Convert a physical value to an electrical value. From temperature, humidity, light, to
Sensing Key requirement of autonomous systems. An AS should be connected to the outside world. Autonomous systems Convert a physical value to an electrical value. From temperature, humidity, light, to
Visual Effects of. Light. Warmth. Light is life. Sun as a deity (god) If sun would turn off the life on earth would extinct
 If sun would turn off the life on earth would extinct") Visual Effects of Light Prof. Grega Bizjak, PhD Laboratory of Lighting and Photometry Faculty of Electrical Engineering University of Ljubljana Light is life If sun would turn off the life on earth would
Visual Effects of Light Prof. Grega Bizjak, PhD Laboratory of Lighting and Photometry Faculty of Electrical Engineering University of Ljubljana Light is life If sun would turn off the life on earth would
Sketching Interface. Larry Rudolph April 24, Pervasive Computing MIT SMA 5508 Spring 2006 Larry Rudolph
 Sketching Interface Larry April 24, 2006 1 Motivation Natural Interface touch screens + more Mass-market of h/w devices available Still lack of s/w & applications for it Similar and different from speech
Sketching Interface Larry April 24, 2006 1 Motivation Natural Interface touch screens + more Mass-market of h/w devices available Still lack of s/w & applications for it Similar and different from speech
Environmental Sound Recognition using MP-based Features
 Environmental Sound Recognition using MP-based Features Selina Chu, Shri Narayanan *, and C.-C. Jay Kuo * Speech Analysis and Interpretation Lab Signal & Image Processing Institute Department of Computer
Environmental Sound Recognition using MP-based Features Selina Chu, Shri Narayanan *, and C.-C. Jay Kuo * Speech Analysis and Interpretation Lab Signal & Image Processing Institute Department of Computer
Sketching Interface. Motivation
 Sketching Interface Larry Rudolph April 5, 2007 1 1 Natural Interface Motivation touch screens + more Mass-market of h/w devices available Still lack of s/w & applications for it Similar and different
Sketching Interface Larry Rudolph April 5, 2007 1 1 Natural Interface Motivation touch screens + more Mass-market of h/w devices available Still lack of s/w & applications for it Similar and different
Binaural Hearing. Reading: Yost Ch. 12
 Binaural Hearing Reading: Yost Ch. 12 Binaural Advantages Sounds in our environment are usually complex, and occur either simultaneously or close together in time. Studies have shown that the ability to
Binaural Hearing Reading: Yost Ch. 12 Binaural Advantages Sounds in our environment are usually complex, and occur either simultaneously or close together in time. Studies have shown that the ability to
Why interest in visual perception?
 Raffaella Folgieri Digital Information & Communication Departiment Constancy factors in visual perception 26/11/2010, Gjovik, Norway Why interest in visual perception? to investigate main factors in VR
Raffaella Folgieri Digital Information & Communication Departiment Constancy factors in visual perception 26/11/2010, Gjovik, Norway Why interest in visual perception? to investigate main factors in VR
Introduction to cochlear implants Philipos C. Loizou Figure Captions
 http://www.utdallas.edu/~loizou/cimplants/tutorial/ Introduction to cochlear implants Philipos C. Loizou Figure Captions Figure 1. The top panel shows the time waveform of a 30-msec segment of the vowel
http://www.utdallas.edu/~loizou/cimplants/tutorial/ Introduction to cochlear implants Philipos C. Loizou Figure Captions Figure 1. The top panel shows the time waveform of a 30-msec segment of the vowel
Optic Flow Based Skill Learning for A Humanoid to Trap, Approach to, and Pass a Ball
 Optic Flow Based Skill Learning for A Humanoid to Trap, Approach to, and Pass a Ball Masaki Ogino 1, Masaaki Kikuchi 1, Jun ichiro Ooga 1, Masahiro Aono 1 and Minoru Asada 1,2 1 Dept. of Adaptive Machine
Optic Flow Based Skill Learning for A Humanoid to Trap, Approach to, and Pass a Ball Masaki Ogino 1, Masaaki Kikuchi 1, Jun ichiro Ooga 1, Masahiro Aono 1 and Minoru Asada 1,2 1 Dept. of Adaptive Machine
ROBOT VISION. Dr.M.Madhavi, MED, MVSREC
 ROBOT VISION Dr.M.Madhavi, MED, MVSREC Robotic vision may be defined as the process of acquiring and extracting information from images of 3-D world. Robotic vision is primarily targeted at manipulation
ROBOT VISION Dr.M.Madhavi, MED, MVSREC Robotic vision may be defined as the process of acquiring and extracting information from images of 3-D world. Robotic vision is primarily targeted at manipulation
An Auditory Localization and Coordinate Transform Chip
 An Auditory Localization and Coordinate Transform Chip Timothy K. Horiuchi timmer@cns.caltech.edu Computation and Neural Systems Program California Institute of Technology Pasadena, CA 91125 Abstract The
An Auditory Localization and Coordinate Transform Chip Timothy K. Horiuchi timmer@cns.caltech.edu Computation and Neural Systems Program California Institute of Technology Pasadena, CA 91125 Abstract The
Available theses in robotics (March 2018) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin
 Prof. Paolo Rocco Prof. Andrea Maria Zanchettin") Available theses in robotics (March 2018) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Ergonomic positioning of bulky objects Thesis 1 Robot acts as a 3rd hand for workpiece positioning: Muscular fatigue
Available theses in robotics (March 2018) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Ergonomic positioning of bulky objects Thesis 1 Robot acts as a 3rd hand for workpiece positioning: Muscular fatigue
Analytical Analysis of Disturbed Radio Broadcast
 th International Workshop on Perceptual Quality of Systems (PQS 0) - September 0, Vienna, Austria Analysis of Disturbed Radio Broadcast Jan Reimes, Marc Lepage, Frank Kettler Jörg Zerlik, Frank Homann,
th International Workshop on Perceptual Quality of Systems (PQS 0) - September 0, Vienna, Austria Analysis of Disturbed Radio Broadcast Jan Reimes, Marc Lepage, Frank Kettler Jörg Zerlik, Frank Homann,
Available theses in robotics (November 2017) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin
 Prof. Paolo Rocco Prof. Andrea Maria Zanchettin") Available theses in robotics (November 2017) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Ergonomic positioning of bulky objects Thesis 1 Robot acts as a 3rd hand for workpiece positioning: Muscular
Available theses in robotics (November 2017) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Ergonomic positioning of bulky objects Thesis 1 Robot acts as a 3rd hand for workpiece positioning: Muscular
An introduction to physics of Sound
 An introduction to physics of Sound Outlines Acoustics and psycho-acoustics Sound? Wave and waves types Cycle Basic parameters of sound wave period Amplitude Wavelength Frequency Outlines Phase Types of
An introduction to physics of Sound Outlines Acoustics and psycho-acoustics Sound? Wave and waves types Cycle Basic parameters of sound wave period Amplitude Wavelength Frequency Outlines Phase Types of
Color. Used heavily in human vision. Color is a pixel property, making some recognition problems easy
 Color Used heavily in human vision Color is a pixel property, making some recognition problems easy Visible spectrum for humans is 400 nm (blue) to 700 nm (red) Machines can see much more; ex. X-rays,
Color Used heavily in human vision Color is a pixel property, making some recognition problems easy Visible spectrum for humans is 400 nm (blue) to 700 nm (red) Machines can see much more; ex. X-rays,
Range Sensing strategies
 Range Sensing strategies Active range sensors Ultrasound Laser range sensor Slides adopted from Siegwart and Nourbakhsh 4.1.6 Range Sensors (time of flight) (1) Large range distance measurement -> called
Range Sensing strategies Active range sensors Ultrasound Laser range sensor Slides adopted from Siegwart and Nourbakhsh 4.1.6 Range Sensors (time of flight) (1) Large range distance measurement -> called
Fundamentals of Music Technology
 Fundamentals of Music Technology Juan P. Bello Office: 409, 4th floor, 383 LaFayette Street (ext. 85736) Office Hours: Wednesdays 2-5pm Email: jpbello@nyu.edu URL: http://homepages.nyu.edu/~jb2843/ Course-info:
Fundamentals of Music Technology Juan P. Bello Office: 409, 4th floor, 383 LaFayette Street (ext. 85736) Office Hours: Wednesdays 2-5pm Email: jpbello@nyu.edu URL: http://homepages.nyu.edu/~jb2843/ Course-info:
Effects of Reverberation on Pitch, Onset/Offset, and Binaural Cues
 Effects of Reverberation on Pitch, Onset/Offset, and Binaural Cues DeLiang Wang Perception & Neurodynamics Lab The Ohio State University Outline of presentation Introduction Human performance Reverberation
Effects of Reverberation on Pitch, Onset/Offset, and Binaural Cues DeLiang Wang Perception & Neurodynamics Lab The Ohio State University Outline of presentation Introduction Human performance Reverberation
Unit IV: Sensation & Perception. Module 19 Vision Organization & Interpretation
 Unit IV: Sensation & Perception Module 19 Vision Organization & Interpretation Visual Organization 19-1 Perceptual Organization 19-1 How do we form meaningful perceptions from sensory information? A group
Unit IV: Sensation & Perception Module 19 Vision Organization & Interpretation Visual Organization 19-1 Perceptual Organization 19-1 How do we form meaningful perceptions from sensory information? A group
Chapter 17. Shape-Based Operations
 Chapter 17 Shape-Based Operations An shape-based operation identifies or acts on groups of pixels that belong to the same object or image component. We have already seen how components may be identified
Chapter 17 Shape-Based Operations An shape-based operation identifies or acts on groups of pixels that belong to the same object or image component. We have already seen how components may be identified
Humanoid Robotics (TIF 160)
") Humanoid Robotics (TIF 160) Lecture 1, 20090901 Introduction and motivation to humanoid robotics What will you learn? (Aims) Basic facts about humanoid robots Kinematics (and dynamics) of humanoid robots
Humanoid Robotics (TIF 160) Lecture 1, 20090901 Introduction and motivation to humanoid robotics What will you learn? (Aims) Basic facts about humanoid robots Kinematics (and dynamics) of humanoid robots
Fast, Robust Colour Vision for the Monash Humanoid Andrew Price Geoff Taylor Lindsay Kleeman
 Fast, Robust Colour Vision for the Monash Humanoid Andrew Price Geoff Taylor Lindsay Kleeman Intelligent Robotics Research Centre Monash University Clayton 3168, Australia andrew.price@eng.monash.edu.au
Fast, Robust Colour Vision for the Monash Humanoid Andrew Price Geoff Taylor Lindsay Kleeman Intelligent Robotics Research Centre Monash University Clayton 3168, Australia andrew.price@eng.monash.edu.au
Sound Source Localization using HRTF database
 ICCAS June -, KINTEX, Gyeonggi-Do, Korea Sound Source Localization using HRTF database Sungmok Hwang*, Youngjin Park and Younsik Park * Center for Noise and Vibration Control, Dept. of Mech. Eng., KAIST,
ICCAS June -, KINTEX, Gyeonggi-Do, Korea Sound Source Localization using HRTF database Sungmok Hwang*, Youngjin Park and Younsik Park * Center for Noise and Vibration Control, Dept. of Mech. Eng., KAIST,
An Example of robots with their sensors
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Mobile & Service Robotics Sensors for Robotics 1 An Example of robots with their sensors Basilio Bona ROBOTICS 01PEEQW 3 Another example Omnivision
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Mobile & Service Robotics Sensors for Robotics 1 An Example of robots with their sensors Basilio Bona ROBOTICS 01PEEQW 3 Another example Omnivision