Perception and Perspective in Robotics
|
|
|
- Nancy Gilbert
- 5 years ago
- Views:
Transcription

1 Perception and Perspective in Robotics Paul Fitzpatrick MIT CSAIL USA
![experimentation helps perception Rachel: We have got to find out if [ugly naked guy]'s alive.](/docs-images/85/91725828/images/2-0.jpg "Monica: How are we going to do that? There's no way. Joey: Well there is one way. His window's open I say, we poke him.")
2 experimentation helps perception Rachel: We have got to find out if [ugly naked guy]'s alive. Monica: How are we going to do that? There's no way. Joey: Well there is one way. His window's open I say, we poke him. (brandishes the Giant Poking Device)

3 robots can experiment Robot: We have got to find out where this object s boundary is. Camera: How are we going to do that? There's no way. Robot: Well there is one way. Looks reachable I say, let s poke it. (brandishes the Giant Poking Limb)
4 the root of all vision object segmentation poking affordance exploitation (rolling) edge catalog object detection (recognition, localization, contact-free segmentation) manipulator detection (robot, human)
5 theoretical goal: a virtuous circle familiar activities use constraint of familiar activity to discover unfamiliar entity used within it reveal the structure of unfamiliar activities by tracking familiar entities into and through them familiar entities (objects, actors, properties, )
6 practical goal: adaptive robots Motivated by fallibility Complex action and perception will fail Need simpler fall-back methods that resolve ambiguity, learn from errors Motivated by transience Task for robot may change from day to day Ambient conditions change Best to build in adaptivity from very beginning Motivated by infants Perceptual development outpaces motor Able to explore despite sloppy control
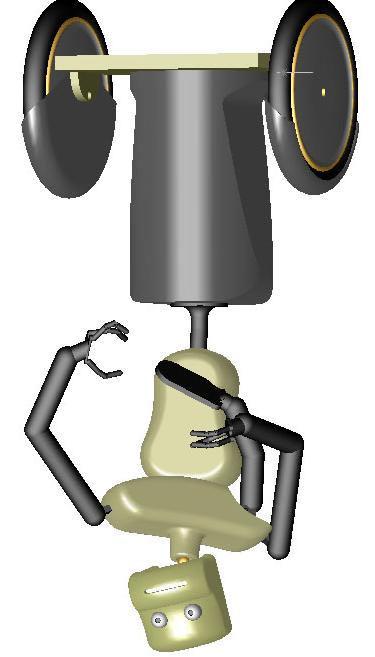
 Left arm (6 DOFs) Torso (3 DOFs) Stand (0")
7 giant poking device: Cog Head (7 DOFs) Right arm (6 DOFs) Left arm (6 DOFs) Torso (3 DOFs) Stand (0 DOFs)

8 giant poking device: Cog
9 talk overview Learning from an activity Poking: to learn to recognize objects, manipulators, etc. Chatting: to learn the names of objects Learning a new activity Searching for an object Then back to learning from the activity
10 virtuous circle poking objects,

11 virtuous circle poking, chatting ball! objects, words, names,
12 virtuous circle poking, chatting, search search objects, words, names,
13 virtuous circle poking, chatting, search search objects, words, names,
14 talk overview Learning from an activity Poking: to learn to recognize objects, manipulators, etc. Chatting: to learn the names of objects Learning a new activity Searching for an object Then back to learning from the activity
15 talk overview Learning from an activity Poking: to learn to recognize objects, manipulators, etc. Chatting: to learn the names of objects Learning a new activity Searching for an object Then back to learning from the activity
16 object segmentation poking affordance exploitation (rolling) edge catalog object detection (recognition, localization, contact-free segmentation) manipulator detection (robot, human)
17 object segmentation poking
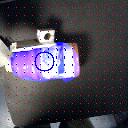
18 Active Segmentation segmenting objects through action
19 Active Segmentation segmenting objects by coming into contact with them
20 a simple scene? Edges of table and cube overlap Cube has misleading surface pattern Color of cube and table are poorly separated Maybe some cruel grad-student faked the cube with paper, or glued it to the table

21 active segmentation
22 active segmentation

23 Sandini et al, 1993
24 where to poke? Visual attention system Robot selects a region to fixate based on salience (bright colors, motion, etc.) Region won t generally correspond to extent of object Poking activation Region is stationary Region reachable (right distance, not too high up) Distance measured through binocular disparity









25 visual attention system person approaches shakes object moves object hides object stands up attracted to skin color attracted to bright color, movement smooth pursuit attracted to skin color smooth pursuit (Collaboration with Brian Scassellati, Giorgio Metta, Cynthia Breazeal)

26 tracking

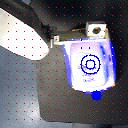
27 poking activation
28 evidence for segmentation Areas where motion is observed upon contact classify as foreground Areas where motion is observed immediately before contact classify as background Textured areas where no motion was observed classify as background Textureless areas where no motion was observed no information
29 minimum cut allegiance to foreground foreground node pixel-to-pixel allegiance pixel nodes allegiance to background background node allegiance = cost of assigning two nodes to different layers (foreground versus background)
30 minimum cut allegiance to foreground foreground node pixel-to-pixel allegiance pixel nodes allegiance to background background node allegiance = cost of assigning two nodes to different layers (foreground versus background)
 ground points (stationary, or")
31 grouping (on synthetic data) proposed segmentation figure points (known motion) ground points (stationary, or gripper)


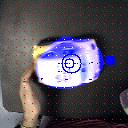
32 point of contact Motion spreads continuously (arm or its shadow) Motion spreads suddenly, faster than the arm itself contact

33 point of contact



")
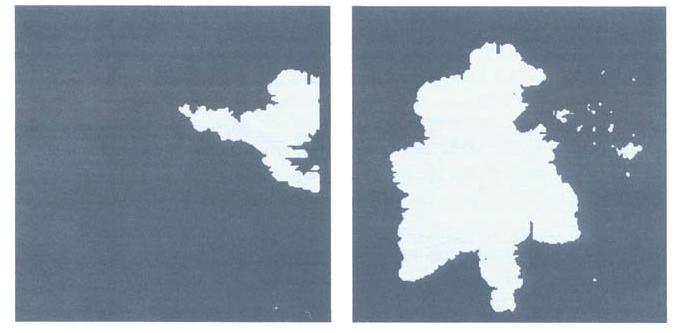
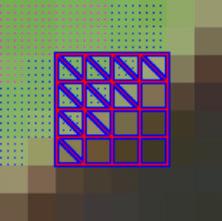
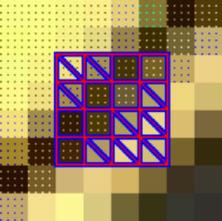
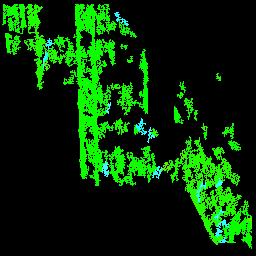
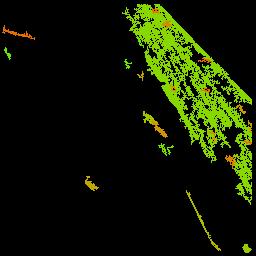
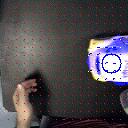
34 segmentation examples Side tap Back slap Impact event Motion caused (red = novel, Purple/blue = discounted) Segmentation (green/yellow)
35 segmentation examples

36 segmentation examples car table
37 boundary fidelity measure of anisiotropy (square root of) second Hu moment cube car bottle ball measure of size (area at poking distance)




38 signal to noise
39 object segmentation poking edge catalog
40 Appearance Catalog exhaustively characterizing the appearance of a low-level feature
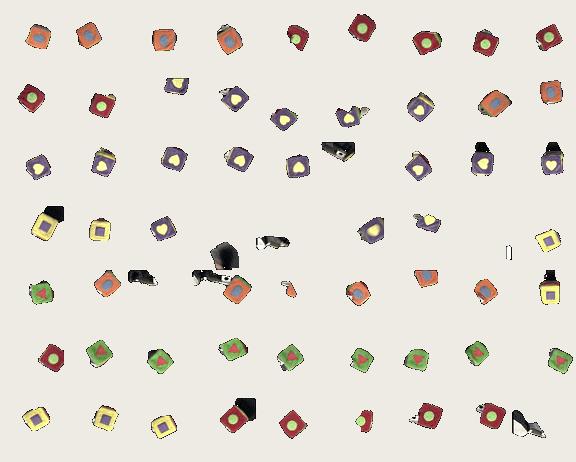
41 sampling oriented regions

42 sample samples

43 most frequent samples 1 st 21 st 41 st 61 st 81 st 101 st 121 st 141 st 161 st 181 st 201 st 221 st

44 selected samples

45 some tests Red = horizontal Green = vertical



46 natural images 0 0 ± ± ± ±22.5 0
47 object segmentation poking edge catalog object detection (recognition, localization, contact-free segmentation)
48 Open Object Recognition detecting and recognizing familiar objects, enrolling unfamiliar objects
49 object recognition Geometry-based Objects and images modeled as set of point/surface/volume elements Example real-time method: store geometric relationships in hash table Appearance-based Objects and images modeled as set of features closer to raw image Example real-time method: use histograms of simple features (e.g. color)
50 geometry+appearance angles + colors + relative sizes invariant to scale, translation, In-plane rotation Advantages: more selective; fast Disadvantages: edges can be occluded; 2D method Property: no need for offline training
51 details of features Distinguishing elements: Angle between regions (edges) Position of regions relative to their projected intersection point (normalized for scale, orientation) Color at three sample points along line between region centroids Output of feature match: Predicts approximate center and scale of object if match exists Weighting for combining features: Summed at each possible position of center; consistency check for scale Weighted by frequency of occurrence of feature in object examples, and edge length

52 localization example look for this in this
53 localization example
54 localization example

55 localization example just using geometry geometry + appearance


56 other examples

57 other examples



58 other examples

59 just for fun look for this in this result



60 real object in real images
61 yellow on yellow



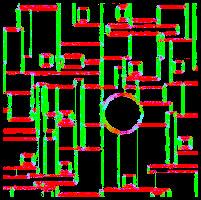
62 multiple objects camera image implicated edges found and grouped response for each object
63 extending the attention system low-level salience filters object recognition/ localization (wide) object recognition/ localization (foveal) poking sequencer tracker motor control (arm) motor control (eyes, head, neck) egocentric map

64 attention

65 open object recognition robot s current view recognized object (as seen during poking) pokes, segments ball sees ball, thinks it is cube correctly differentiates ball and cube
66 open object recognition
67 object segmentation poking edge catalog object detection (recognition, localization, contact-free segmentation) manipulator detection (robot, human)
68 finding manipulators Analogous to finding objects Object Actor Definition: physically coherent structure How to find one: poke around and see what moves together Definition: something that acts on objects How to find one: see what pokes objects


69 similar human and robot actions Object connects robot and human action


70 catching manipulators in the act manipulator approaches object contact!




71 modeling manipulators


72 manipulator recognition
73 object segmentation poking affordance exploitation (rolling) edge catalog object detection (recognition, localization, contact-free segmentation) manipulator detection (robot, human)
74 Affordance Recognition switching from object-centric perception to recognizing action opportunities (collaboration with Giorgio Metta)
75 what is an affordance? A leaf affords rest/walking to an ant but not to an elephant

76 exploring affordances



77 objects roll in different ways a bottle it rolls along its side a toy car it rolls forward a toy cube it doesn t roll easily a ball it rolls in any direction
78 preferred direction of motion Bottle, pointedness= Car, pointedness=0.07 frequency of occurrence Cube, pointedness=0.03 Rolls at right angles to principal axis Rolls along principal axis Ball, pointedness= difference between angle of motion and principal axis of object (degrees)


79 affordance exploitation Caveat: this work uses an early version of object detection (not the one presented today)










80 mimicry test Invoking the object s natural rolling affordance Going against the object s natural rolling affordance Demonstration by human Mimicry in similar situation Mimicry when object is rotated

81 mimicry test
82 object segmentation poking affordance exploitation (rolling) edge catalog object detection (recognition, localization, contact-free segmentation) manipulator detection (robot, human)
83 talk overview Learning from an activity Poking: to learn to recognize objects, manipulators, etc. Chatting: to learn the names of objects Learning a new activity Searching for an object Then back to learning from the activity

84 open speech recognition Vocabulary can be extended at any time Assumes active vocabulary is small Isolated words only
85 keeping track of objects EgoMap short term memory of objects and their locations so out of sight is not out of mind

86 keeping track of objects

87 speech and space: chatting
88 talk overview Learning from an activity Poking: to learn to recognize objects, manipulators, etc. Chatting: to learn the names of objects Learning a new activity Searching for an object Then back to learning from the activity
89 Tomasello s experiments Designed experiments to challenge constraint-based theory of language acquisition in infants Wants to show infants learn words through real understanding of activity ( flow of interaction ), not hacks Great test cases! Get beyond direct association (But where does knowledge of activity come from?)
90 let s go find the toma! Infant plays with set of objects Then adult says let s go find the toma! (nonce word) Acts out a search, going to several objects first before finally finding the toma Later, infant tested to see which object it thinks is the toma Several variants (e.g. toma placed in inaccessible location with the infant watching adult is upset when trying to get it)
91 let s go find the toma!
92 goal Have robot learn about search activity from examples of looking for known objects Then apply that to a find the toma -like scenario
93 virtuous circle poking, chatting discover car, ball, and cube through poking; discover their names through chatting car, ball, cube, and their names
94 virtuous circle poking, chatting, search follow named objects into search activity, and observe the structure of search car, ball, cube, and their names
95 virtuous circle poking, chatting, searching discover object through poking, learn its name ( toma ) indirectly during search car, ball, cube, toma, and their names

96 learning about search
97 what the robot learns Find is followed by mention of an absent object Yes is said when a previously absent object is in view
98 how it learns this Look for reliable event/state combinations, sequences Events are: hearing a word seeing an object States are: recent events situation evaluations (object corresponding to word not present, mismatch between word and object, etc.)

99 finding the toma
100 caveats Much much less sophisticated than infants! Cues the robot is sensitive to are very impoverished Slightly different from Tomasello s experiment Saved state between stages wasn t one complete continuous run
101 conclusions: why do this? Uses all the alternative essences of intelligence Development Social interaction Embodiment Integration Points the way to really flexible robots today the robot should sort widgets from wombats (neither of which it has seen before) who knows what it will have to do tomorrow
102 conclusions: contributions active segmentation appearance catalog open object recognition affordance recognition open speech recognition virtuous circle of development through contact for oriented features for correction, enrollment for rolling for isolated words learning about and through activity
103 conclusions: the future Dexterous manipulation Object perception (visual, tactile, acoustic) During dextrous manipulation During failed manipulation Integration with useful platform Socially enabled Mobile

104
105 Tom Murphy (
Manipulation. Manipulation. Better Vision through Manipulation. Giorgio Metta Paul Fitzpatrick. Humanoid Robotics Group.
 Manipulation Manipulation Better Vision through Manipulation Giorgio Metta Paul Fitzpatrick Humanoid Robotics Group MIT AI Lab Vision & Manipulation In robotics, vision is often used to guide manipulation
Manipulation Manipulation Better Vision through Manipulation Giorgio Metta Paul Fitzpatrick Humanoid Robotics Group MIT AI Lab Vision & Manipulation In robotics, vision is often used to guide manipulation
Perception. Read: AIMA Chapter 24 & Chapter HW#8 due today. Vision
 11-25-2013 Perception Vision Read: AIMA Chapter 24 & Chapter 25.3 HW#8 due today visual aural haptic & tactile vestibular (balance: equilibrium, acceleration, and orientation wrt gravity) olfactory taste
11-25-2013 Perception Vision Read: AIMA Chapter 24 & Chapter 25.3 HW#8 due today visual aural haptic & tactile vestibular (balance: equilibrium, acceleration, and orientation wrt gravity) olfactory taste
YDDON. Humans, Robots, & Intelligent Objects New communication approaches
 YDDON Humans, Robots, & Intelligent Objects New communication approaches Building Robot intelligence Interdisciplinarity Turning things into robots www.ydrobotics.co m Edifício A Moagem Cidade do Engenho
YDDON Humans, Robots, & Intelligent Objects New communication approaches Building Robot intelligence Interdisciplinarity Turning things into robots www.ydrobotics.co m Edifício A Moagem Cidade do Engenho
Feel the beat: using cross-modal rhythm to integrate perception of objects, others, and self
 Feel the beat: using cross-modal rhythm to integrate perception of objects, others, and self Paul Fitzpatrick and Artur M. Arsenio CSAIL, MIT Modal and amodal features Modal and amodal features (following
Feel the beat: using cross-modal rhythm to integrate perception of objects, others, and self Paul Fitzpatrick and Artur M. Arsenio CSAIL, MIT Modal and amodal features Modal and amodal features (following
The Whole World in Your Hand: Active and Interactive Segmentation
 The Whole World in Your Hand: Active and Interactive Segmentation Artur Arsenio Paul Fitzpatrick Charles C. Kemp Giorgio Metta 1 MIT AI Lab Cambridge, Massachusetts, USA Lira Lab, DIST, University of Genova
The Whole World in Your Hand: Active and Interactive Segmentation Artur Arsenio Paul Fitzpatrick Charles C. Kemp Giorgio Metta 1 MIT AI Lab Cambridge, Massachusetts, USA Lira Lab, DIST, University of Genova
Object Perception. 23 August PSY Object & Scene 1
 Object Perception Perceiving an object involves many cognitive processes, including recognition (memory), attention, learning, expertise. The first step is feature extraction, the second is feature grouping
Object Perception Perceiving an object involves many cognitive processes, including recognition (memory), attention, learning, expertise. The first step is feature extraction, the second is feature grouping
Sketching Interface. Larry Rudolph April 24, Pervasive Computing MIT SMA 5508 Spring 2006 Larry Rudolph
 Sketching Interface Larry April 24, 2006 1 Motivation Natural Interface touch screens + more Mass-market of h/w devices available Still lack of s/w & applications for it Similar and different from speech
Sketching Interface Larry April 24, 2006 1 Motivation Natural Interface touch screens + more Mass-market of h/w devices available Still lack of s/w & applications for it Similar and different from speech
Sketching Interface. Motivation
 Sketching Interface Larry Rudolph April 5, 2007 1 1 Natural Interface Motivation touch screens + more Mass-market of h/w devices available Still lack of s/w & applications for it Similar and different
Sketching Interface Larry Rudolph April 5, 2007 1 1 Natural Interface Motivation touch screens + more Mass-market of h/w devices available Still lack of s/w & applications for it Similar and different
Social Constraints on Animate Vision
 Social Constraints on Animate Vision Cynthia Breazeal, Aaron Edsinger, Paul Fitzpatrick, Brian Scassellati, Paulina Varchavskaia MIT Artificial Intelligence Laboratory 545 Technology Square Cambridge,
Social Constraints on Animate Vision Cynthia Breazeal, Aaron Edsinger, Paul Fitzpatrick, Brian Scassellati, Paulina Varchavskaia MIT Artificial Intelligence Laboratory 545 Technology Square Cambridge,
Bottom-up and Top-down Perception Bottom-up perception
 Bottom-up and Top-down Perception Bottom-up perception Physical characteristics of stimulus drive perception Realism Top-down perception Knowledge, expectations, or thoughts influence perception Constructivism:
Bottom-up and Top-down Perception Bottom-up perception Physical characteristics of stimulus drive perception Realism Top-down perception Knowledge, expectations, or thoughts influence perception Constructivism:
CHAPTER 1. Introduction. 1.1 The place of perception in AI
 CHAPTER 1 Introduction Everything starts somewhere, although many physicists disagree. But people have always been dimly aware of the problems with the start of things. They wonder aloud how the snowplough
CHAPTER 1 Introduction Everything starts somewhere, although many physicists disagree. But people have always been dimly aware of the problems with the start of things. They wonder aloud how the snowplough
Perception. Introduction to HRI Simmons & Nourbakhsh Spring 2015
 Perception Introduction to HRI Simmons & Nourbakhsh Spring 2015 Perception my goals What is the state of the art boundary? Where might we be in 5-10 years? The Perceptual Pipeline The classical approach:
Perception Introduction to HRI Simmons & Nourbakhsh Spring 2015 Perception my goals What is the state of the art boundary? Where might we be in 5-10 years? The Perceptual Pipeline The classical approach:
APPLICATION OF COMPUTER VISION FOR DETERMINATION OF SYMMETRICAL OBJECT POSITION IN THREE DIMENSIONAL SPACE
 APPLICATION OF COMPUTER VISION FOR DETERMINATION OF SYMMETRICAL OBJECT POSITION IN THREE DIMENSIONAL SPACE Najirah Umar 1 1 Jurusan Teknik Informatika, STMIK Handayani Makassar Email : najirah_stmikh@yahoo.com
APPLICATION OF COMPUTER VISION FOR DETERMINATION OF SYMMETRICAL OBJECT POSITION IN THREE DIMENSIONAL SPACE Najirah Umar 1 1 Jurusan Teknik Informatika, STMIK Handayani Makassar Email : najirah_stmikh@yahoo.com
Human Vision and Human-Computer Interaction. Much content from Jeff Johnson, UI Wizards, Inc.
 Human Vision and Human-Computer Interaction Much content from Jeff Johnson, UI Wizards, Inc. are these guidelines grounded in perceptual psychology and how can we apply them intelligently? Mach bands:
Human Vision and Human-Computer Interaction Much content from Jeff Johnson, UI Wizards, Inc. are these guidelines grounded in perceptual psychology and how can we apply them intelligently? Mach bands:
A developmental approach to grasping
 A developmental approach to grasping Lorenzo Natale, Giorgio Metta and Giulio Sandini LIRA-Lab, DIST, University of Genoa Viale Causa 13, 16145, Genova Italy email: {nat, pasa, sandini}@liralab.it Abstract
A developmental approach to grasping Lorenzo Natale, Giorgio Metta and Giulio Sandini LIRA-Lab, DIST, University of Genoa Viale Causa 13, 16145, Genova Italy email: {nat, pasa, sandini}@liralab.it Abstract
Applying Vision to Intelligent Human-Computer Interaction
 Applying Vision to Intelligent Human-Computer Interaction Guangqi Ye Department of Computer Science The Johns Hopkins University Baltimore, MD 21218 October 21, 2005 1 Vision for Natural HCI Advantages
Applying Vision to Intelligent Human-Computer Interaction Guangqi Ye Department of Computer Science The Johns Hopkins University Baltimore, MD 21218 October 21, 2005 1 Vision for Natural HCI Advantages
Unit IV: Sensation & Perception. Module 19 Vision Organization & Interpretation
 Unit IV: Sensation & Perception Module 19 Vision Organization & Interpretation Visual Organization 19-1 Perceptual Organization 19-1 How do we form meaningful perceptions from sensory information? A group
Unit IV: Sensation & Perception Module 19 Vision Organization & Interpretation Visual Organization 19-1 Perceptual Organization 19-1 How do we form meaningful perceptions from sensory information? A group
Module 2. Lecture-1. Understanding basic principles of perception including depth and its representation.
 Module 2 Lecture-1 Understanding basic principles of perception including depth and its representation. Initially let us take the reference of Gestalt law in order to have an understanding of the basic
Module 2 Lecture-1 Understanding basic principles of perception including depth and its representation. Initially let us take the reference of Gestalt law in order to have an understanding of the basic
Teaching robots: embodied machine learning strategies for networked robotic applications
 Teaching robots: embodied machine learning strategies for networked robotic applications Artur Arsenio Departamento de Engenharia Informática, Instituto Superior técnico / Universidade Técnica de Lisboa
Teaching robots: embodied machine learning strategies for networked robotic applications Artur Arsenio Departamento de Engenharia Informática, Instituto Superior técnico / Universidade Técnica de Lisboa
Thinking About Psychology: The Science of Mind and Behavior 2e. Charles T. Blair-Broeker Randal M. Ernst
 Thinking About Psychology: The Science of Mind and Behavior 2e Charles T. Blair-Broeker Randal M. Ernst Sensation and Perception Chapter Module 9 Perception Perception While sensation is the process by
Thinking About Psychology: The Science of Mind and Behavior 2e Charles T. Blair-Broeker Randal M. Ernst Sensation and Perception Chapter Module 9 Perception Perception While sensation is the process by
This histogram represents the +½ stop exposure from the bracket illustrated on the first page.
 Washtenaw Community College Digital M edia Arts Photo http://courses.wccnet.edu/~donw Don W erthm ann GM300BB 973-3586 donw@wccnet.edu Exposure Strategies for Digital Capture Regardless of the media choice
Washtenaw Community College Digital M edia Arts Photo http://courses.wccnet.edu/~donw Don W erthm ann GM300BB 973-3586 donw@wccnet.edu Exposure Strategies for Digital Capture Regardless of the media choice
CSE 165: 3D User Interaction. Lecture #14: 3D UI Design
 CSE 165: 3D User Interaction Lecture #14: 3D UI Design 2 Announcements Homework 3 due tomorrow 2pm Monday: midterm discussion Next Thursday: midterm exam 3D UI Design Strategies 3 4 Thus far 3DUI hardware
CSE 165: 3D User Interaction Lecture #14: 3D UI Design 2 Announcements Homework 3 due tomorrow 2pm Monday: midterm discussion Next Thursday: midterm exam 3D UI Design Strategies 3 4 Thus far 3DUI hardware
Photographing Long Scenes with Multiviewpoint
 Photographing Long Scenes with Multiviewpoint Panoramas A. Agarwala, M. Agrawala, M. Cohen, D. Salesin, R. Szeliski Presenter: Stacy Hsueh Discussant: VasilyVolkov Motivation Want an image that shows an
Photographing Long Scenes with Multiviewpoint Panoramas A. Agarwala, M. Agrawala, M. Cohen, D. Salesin, R. Szeliski Presenter: Stacy Hsueh Discussant: VasilyVolkov Motivation Want an image that shows an
9.5 symmetry 2017 ink.notebook. October 25, Page Symmetry Page 134. Standards. Page Symmetry. Lesson Objectives.
 9.5 symmetry 2017 ink.notebook Page 133 9.5 Symmetry Page 134 Lesson Objectives Standards Lesson Notes Page 135 9.5 Symmetry Press the tabs to view details. 1 Lesson Objectives Press the tabs to view details.
9.5 symmetry 2017 ink.notebook Page 133 9.5 Symmetry Page 134 Lesson Objectives Standards Lesson Notes Page 135 9.5 Symmetry Press the tabs to view details. 1 Lesson Objectives Press the tabs to view details.
the dimensionality of the world Travelling through Space and Time Learning Outcomes Johannes M. Zanker
 Travelling through Space and Time Johannes M. Zanker http://www.pc.rhul.ac.uk/staff/j.zanker/ps1061/l4/ps1061_4.htm 05/02/2015 PS1061 Sensation & Perception #4 JMZ 1 Learning Outcomes at the end of this
Travelling through Space and Time Johannes M. Zanker http://www.pc.rhul.ac.uk/staff/j.zanker/ps1061/l4/ps1061_4.htm 05/02/2015 PS1061 Sensation & Perception #4 JMZ 1 Learning Outcomes at the end of this
Lecture 8. Human Information Processing (1) CENG 412-Human Factors in Engineering May
 CENG 412-Human Factors in Engineering May") Lecture 8. Human Information Processing (1) CENG 412-Human Factors in Engineering May 30 2009 1 Outline Visual Sensory systems Reading Wickens pp. 61-91 2 Today s story: Textbook page 61. List the vision-related
Lecture 8. Human Information Processing (1) CENG 412-Human Factors in Engineering May 30 2009 1 Outline Visual Sensory systems Reading Wickens pp. 61-91 2 Today s story: Textbook page 61. List the vision-related
DepthTouch: Using Depth-Sensing Camera to Enable Freehand Interactions On and Above the Interactive Surface
 DepthTouch: Using Depth-Sensing Camera to Enable Freehand Interactions On and Above the Interactive Surface Hrvoje Benko and Andrew D. Wilson Microsoft Research One Microsoft Way Redmond, WA 98052, USA
DepthTouch: Using Depth-Sensing Camera to Enable Freehand Interactions On and Above the Interactive Surface Hrvoje Benko and Andrew D. Wilson Microsoft Research One Microsoft Way Redmond, WA 98052, USA
4 Perceiving and Recognizing Objects
 4 Perceiving and Recognizing Objects Chapter 4 4 Perceiving and Recognizing Objects Finding edges Grouping and texture segmentation Figure Ground assignment Edges, parts, and wholes Object recognition
4 Perceiving and Recognizing Objects Chapter 4 4 Perceiving and Recognizing Objects Finding edges Grouping and texture segmentation Figure Ground assignment Edges, parts, and wholes Object recognition
Chapter 17. Shape-Based Operations
 Chapter 17 Shape-Based Operations An shape-based operation identifies or acts on groups of pixels that belong to the same object or image component. We have already seen how components may be identified
Chapter 17 Shape-Based Operations An shape-based operation identifies or acts on groups of pixels that belong to the same object or image component. We have already seen how components may be identified
Insights into High-level Visual Perception
 Insights into High-level Visual Perception or Where You Look is What You Get Jeff B. Pelz Visual Perception Laboratory Carlson Center for Imaging Science Rochester Institute of Technology Students Roxanne
Insights into High-level Visual Perception or Where You Look is What You Get Jeff B. Pelz Visual Perception Laboratory Carlson Center for Imaging Science Rochester Institute of Technology Students Roxanne
Computer Vision. Howie Choset Introduction to Robotics
 Computer Vision Howie Choset http://www.cs.cmu.edu.edu/~choset Introduction to Robotics http://generalrobotics.org What is vision? What is computer vision? Edge Detection Edge Detection Interest points
Computer Vision Howie Choset http://www.cs.cmu.edu.edu/~choset Introduction to Robotics http://generalrobotics.org What is vision? What is computer vision? Edge Detection Edge Detection Interest points
Real- Time Computer Vision and Robotics Using Analog VLSI Circuits
 750 Koch, Bair, Harris, Horiuchi, Hsu and Luo Real- Time Computer Vision and Robotics Using Analog VLSI Circuits Christof Koch Wyeth Bair John. Harris Timothy Horiuchi Andrew Hsu Jin Luo Computation and
750 Koch, Bair, Harris, Horiuchi, Hsu and Luo Real- Time Computer Vision and Robotics Using Analog VLSI Circuits Christof Koch Wyeth Bair John. Harris Timothy Horiuchi Andrew Hsu Jin Luo Computation and
COPYRIGHTED MATERIAL. Overview
 In normal experience, our eyes are constantly in motion, roving over and around objects and through ever-changing environments. Through this constant scanning, we build up experience data, which is manipulated
In normal experience, our eyes are constantly in motion, roving over and around objects and through ever-changing environments. Through this constant scanning, we build up experience data, which is manipulated
Fig Color spectrum seen by passing white light through a prism.
 1. Explain about color fundamentals. Color of an object is determined by the nature of the light reflected from it. When a beam of sunlight passes through a glass prism, the emerging beam of light is not
1. Explain about color fundamentals. Color of an object is determined by the nature of the light reflected from it. When a beam of sunlight passes through a glass prism, the emerging beam of light is not
COPYRIGHTED MATERIAL OVERVIEW 1
 OVERVIEW 1 In normal experience, our eyes are constantly in motion, roving over and around objects and through ever-changing environments. Through this constant scanning, we build up experiential data,
OVERVIEW 1 In normal experience, our eyes are constantly in motion, roving over and around objects and through ever-changing environments. Through this constant scanning, we build up experiential data,
Angle Measure and Plane Figures
 Grade 4 Module 4 Angle Measure and Plane Figures OVERVIEW This module introduces points, lines, line segments, rays, and angles, as well as the relationships between them. Students construct, recognize,
Grade 4 Module 4 Angle Measure and Plane Figures OVERVIEW This module introduces points, lines, line segments, rays, and angles, as well as the relationships between them. Students construct, recognize,
Virtual Reality I. Visual Imaging in the Electronic Age. Donald P. Greenberg November 9, 2017 Lecture #21
 Virtual Reality I Visual Imaging in the Electronic Age Donald P. Greenberg November 9, 2017 Lecture #21 1968: Ivan Sutherland 1990s: HMDs, Henry Fuchs 2013: Google Glass History of Virtual Reality 2016:
Virtual Reality I Visual Imaging in the Electronic Age Donald P. Greenberg November 9, 2017 Lecture #21 1968: Ivan Sutherland 1990s: HMDs, Henry Fuchs 2013: Google Glass History of Virtual Reality 2016:
Perception. What We Will Cover in This Section. Perception. How we interpret the information our senses receive. Overview Perception
 Perception 10/3/2002 Perception.ppt 1 What We Will Cover in This Section Overview Perception Visual perception. Organizing principles. 10/3/2002 Perception.ppt 2 Perception How we interpret the information
Perception 10/3/2002 Perception.ppt 1 What We Will Cover in This Section Overview Perception Visual perception. Organizing principles. 10/3/2002 Perception.ppt 2 Perception How we interpret the information
Interacting within Virtual Worlds (based on talks by Greg Welch and Mark Mine)
") Interacting within Virtual Worlds (based on talks by Greg Welch and Mark Mine) Presentation Working in a virtual world Interaction principles Interaction examples Why VR in the First Place? Direct perception
Interacting within Virtual Worlds (based on talks by Greg Welch and Mark Mine) Presentation Working in a virtual world Interaction principles Interaction examples Why VR in the First Place? Direct perception
Occlusion. Atmospheric Perspective. Height in the Field of View. Seeing Depth The Cue Approach. Monocular/Pictorial
 Seeing Depth The Cue Approach Occlusion Monocular/Pictorial Cues that are available in the 2D image Height in the Field of View Atmospheric Perspective 1 Linear Perspective Linear Perspective & Texture
Seeing Depth The Cue Approach Occlusion Monocular/Pictorial Cues that are available in the 2D image Height in the Field of View Atmospheric Perspective 1 Linear Perspective Linear Perspective & Texture
8.2 IMAGE PROCESSING VERSUS IMAGE ANALYSIS Image processing: The collection of routines and
 8.1 INTRODUCTION In this chapter, we will study and discuss some fundamental techniques for image processing and image analysis, with a few examples of routines developed for certain purposes. 8.2 IMAGE
8.1 INTRODUCTION In this chapter, we will study and discuss some fundamental techniques for image processing and image analysis, with a few examples of routines developed for certain purposes. 8.2 IMAGE
Perception. The process of organizing and interpreting information, enabling us to recognize meaningful objects and events.
 Perception The process of organizing and interpreting information, enabling us to recognize meaningful objects and events. Perceptual Ideas Perception Selective Attention: focus of conscious
Perception The process of organizing and interpreting information, enabling us to recognize meaningful objects and events. Perceptual Ideas Perception Selective Attention: focus of conscious
CMSC 426, Fall 2012 Problem Set 4 Due October 25
 CMSC 46, Fall 01 Problem Set 4 Due October 5 In this problem set you will implement a mincut approach to image segmentation. This algorithm has been discussed in class. The class web page also contains
CMSC 46, Fall 01 Problem Set 4 Due October 5 In this problem set you will implement a mincut approach to image segmentation. This algorithm has been discussed in class. The class web page also contains
Toward Interactive Learning of Object Categories by a Robot: A Case Study with Container and Non-Container Objects
 Toward Interactive Learning of Object Categories by a Robot: A Case Study with Container and Non-Container Objects Shane Griffith, Jivko Sinapov, Matthew Miller and Alexander Stoytchev Developmental Robotics
Toward Interactive Learning of Object Categories by a Robot: A Case Study with Container and Non-Container Objects Shane Griffith, Jivko Sinapov, Matthew Miller and Alexander Stoytchev Developmental Robotics
CS 465 Prelim 1. Tuesday 4 October hours. Problem 1: Image formats (18 pts)
") CS 465 Prelim 1 Tuesday 4 October 2005 1.5 hours Problem 1: Image formats (18 pts) 1. Give a common pixel data format that uses up the following numbers of bits per pixel: 8, 16, 32, 36. For instance,
CS 465 Prelim 1 Tuesday 4 October 2005 1.5 hours Problem 1: Image formats (18 pts) 1. Give a common pixel data format that uses up the following numbers of bits per pixel: 8, 16, 32, 36. For instance,
Detection and Tracking of the Vanishing Point on a Horizon for Automotive Applications
 Detection and Tracking of the Vanishing Point on a Horizon for Automotive Applications Young-Woo Seo and Ragunathan (Raj) Rajkumar GM-CMU Autonomous Driving Collaborative Research Lab Carnegie Mellon University
Detection and Tracking of the Vanishing Point on a Horizon for Automotive Applications Young-Woo Seo and Ragunathan (Raj) Rajkumar GM-CMU Autonomous Driving Collaborative Research Lab Carnegie Mellon University
SECOND YEAR PROJECT SUMMARY
 SECOND YEAR PROJECT SUMMARY Grant Agreement number: 215805 Project acronym: Project title: CHRIS Cooperative Human Robot Interaction Systems Period covered: from 01 March 2009 to 28 Feb 2010 Contact Details
SECOND YEAR PROJECT SUMMARY Grant Agreement number: 215805 Project acronym: Project title: CHRIS Cooperative Human Robot Interaction Systems Period covered: from 01 March 2009 to 28 Feb 2010 Contact Details
VICs: A Modular Vision-Based HCI Framework
 VICs: A Modular Vision-Based HCI Framework The Visual Interaction Cues Project Guangqi Ye, Jason Corso Darius Burschka, & Greg Hager CIRL, 1 Today, I ll be presenting work that is part of an ongoing project
VICs: A Modular Vision-Based HCI Framework The Visual Interaction Cues Project Guangqi Ye, Jason Corso Darius Burschka, & Greg Hager CIRL, 1 Today, I ll be presenting work that is part of an ongoing project
Abstract shape: a shape that is derived from a visual source, but is so transformed that it bears little visual resemblance to that source.
 Glossary of Terms Abstract shape: a shape that is derived from a visual source, but is so transformed that it bears little visual resemblance to that source. Accent: 1)The least prominent shape or object
Glossary of Terms Abstract shape: a shape that is derived from a visual source, but is so transformed that it bears little visual resemblance to that source. Accent: 1)The least prominent shape or object
IV: Visual Organization and Interpretation
 IV: Visual Organization and Interpretation Describe Gestalt psychologists understanding of perceptual organization, and explain how figure-ground and grouping principles contribute to our perceptions Explain
IV: Visual Organization and Interpretation Describe Gestalt psychologists understanding of perceptual organization, and explain how figure-ground and grouping principles contribute to our perceptions Explain
Visual Interpretation of Hand Gestures as a Practical Interface Modality
 Visual Interpretation of Hand Gestures as a Practical Interface Modality Frederik C. M. Kjeldsen Submitted in partial fulfillment of the requirements for the degree of Doctor of Philosophy in the Graduate
Visual Interpretation of Hand Gestures as a Practical Interface Modality Frederik C. M. Kjeldsen Submitted in partial fulfillment of the requirements for the degree of Doctor of Philosophy in the Graduate
Overview. Pinhole camera model Projective geometry Vanishing points and lines Projection matrix Cameras with Lenses Color Digital image
 Camera & Color Overview Pinhole camera model Projective geometry Vanishing points and lines Projection matrix Cameras with Lenses Color Digital image Book: Hartley 6.1, Szeliski 2.1.5, 2.2, 2.3 The trip
Camera & Color Overview Pinhole camera model Projective geometry Vanishing points and lines Projection matrix Cameras with Lenses Color Digital image Book: Hartley 6.1, Szeliski 2.1.5, 2.2, 2.3 The trip
ENHANCED HUMAN-AGENT INTERACTION: AUGMENTING INTERACTION MODELS WITH EMBODIED AGENTS BY SERAFIN BENTO. MASTER OF SCIENCE in INFORMATION SYSTEMS
 BY SERAFIN BENTO MASTER OF SCIENCE in INFORMATION SYSTEMS Edmonton, Alberta September, 2015 ABSTRACT The popularity of software agents demands for more comprehensive HAI design processes. The outcome of
BY SERAFIN BENTO MASTER OF SCIENCE in INFORMATION SYSTEMS Edmonton, Alberta September, 2015 ABSTRACT The popularity of software agents demands for more comprehensive HAI design processes. The outcome of
Making Representations: From Sensation to Perception
 Making Representations: From Sensation to Perception Mary-Anne Williams Innovation and Enterprise Research Lab University of Technology, Sydney Australia Overview Understanding Cognition Understanding
Making Representations: From Sensation to Perception Mary-Anne Williams Innovation and Enterprise Research Lab University of Technology, Sydney Australia Overview Understanding Cognition Understanding
Introduction to robotics. Md. Ferdous Alam, Lecturer, MEE, SUST
 Introduction to robotics Md. Ferdous Alam, Lecturer, MEE, SUST Hello class! Let s watch a video! So, what do you think? It s cool, isn t it? The dedication is not! A brief history The first digital and
Introduction to robotics Md. Ferdous Alam, Lecturer, MEE, SUST Hello class! Let s watch a video! So, what do you think? It s cool, isn t it? The dedication is not! A brief history The first digital and
CHAPTER. Line and Shape
 CHAPTER 4 Line and Shape Lines are everywhere in the real world. For example, doorways have two vertical lines, and a volleyball has one curved line. The real world is also full of shapes. A door is a
CHAPTER 4 Line and Shape Lines are everywhere in the real world. For example, doorways have two vertical lines, and a volleyball has one curved line. The real world is also full of shapes. A door is a
Image Capture and Problems
 Image Capture and Problems A reasonable capture IVR Vision: Flat Part Recognition Fisher lecture 4 slide 1 Image Capture: Focus problems Focus set to one distance. Nearby distances in focus (depth of focus).
Image Capture and Problems A reasonable capture IVR Vision: Flat Part Recognition Fisher lecture 4 slide 1 Image Capture: Focus problems Focus set to one distance. Nearby distances in focus (depth of focus).
Perceived depth is enhanced with parallax scanning
 Perceived Depth is Enhanced with Parallax Scanning March 1, 1999 Dennis Proffitt & Tom Banton Department of Psychology University of Virginia Perceived depth is enhanced with parallax scanning Background
Perceived Depth is Enhanced with Parallax Scanning March 1, 1999 Dennis Proffitt & Tom Banton Department of Psychology University of Virginia Perceived depth is enhanced with parallax scanning Background
MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT
 MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT F. TIECHE, C. FACCHINETTI and H. HUGLI Institute of Microtechnology, University of Neuchâtel, Rue de Tivoli 28, CH-2003
MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT F. TIECHE, C. FACCHINETTI and H. HUGLI Institute of Microtechnology, University of Neuchâtel, Rue de Tivoli 28, CH-2003
Chapter 1 Introduction
 Chapter 1 Introduction It is appropriate to begin the textbook on robotics with the definition of the industrial robot manipulator as given by the ISO 8373 standard. An industrial robot manipulator is
Chapter 1 Introduction It is appropriate to begin the textbook on robotics with the definition of the industrial robot manipulator as given by the ISO 8373 standard. An industrial robot manipulator is
Bandit Detection using Color Detection Method
 Available online at www.sciencedirect.com Procedia Engineering 29 (2012) 1259 1263 2012 International Workshop on Information and Electronic Engineering Bandit Detection using Color Detection Method Junoh,
Available online at www.sciencedirect.com Procedia Engineering 29 (2012) 1259 1263 2012 International Workshop on Information and Electronic Engineering Bandit Detection using Color Detection Method Junoh,
Perceptual Characters of Photorealistic See-through Vision in Handheld Augmented Reality
 Perceptual Characters of Photorealistic See-through Vision in Handheld Augmented Reality Arindam Dey PhD Student Magic Vision Lab University of South Australia Supervised by: Dr Christian Sandor and Prof.
Perceptual Characters of Photorealistic See-through Vision in Handheld Augmented Reality Arindam Dey PhD Student Magic Vision Lab University of South Australia Supervised by: Dr Christian Sandor and Prof.
You ve heard about the different types of lines that can appear in line drawings. Now we re ready to talk about how people perceive line drawings.
 You ve heard about the different types of lines that can appear in line drawings. Now we re ready to talk about how people perceive line drawings. 1 Line drawings bring together an abundance of lines to
You ve heard about the different types of lines that can appear in line drawings. Now we re ready to talk about how people perceive line drawings. 1 Line drawings bring together an abundance of lines to
Evaluation of Guidance Systems in Public Infrastructures Using Eye Tracking in an Immersive Virtual Environment
 Evaluation of Guidance Systems in Public Infrastructures Using Eye Tracking in an Immersive Virtual Environment Helmut Schrom-Feiertag 1, Christoph Schinko 2, Volker Settgast 3, and Stefan Seer 1 1 Austrian
Evaluation of Guidance Systems in Public Infrastructures Using Eye Tracking in an Immersive Virtual Environment Helmut Schrom-Feiertag 1, Christoph Schinko 2, Volker Settgast 3, and Stefan Seer 1 1 Austrian
Introduction. Related Work
 Introduction Depth of field is a natural phenomenon when it comes to both sight and photography. The basic ray tracing camera model is insufficient at representing this essential visual element and will
Introduction Depth of field is a natural phenomenon when it comes to both sight and photography. The basic ray tracing camera model is insufficient at representing this essential visual element and will
IMAGE PROCESSING PAPER PRESENTATION ON IMAGE PROCESSING
 IMAGE PROCESSING PAPER PRESENTATION ON IMAGE PROCESSING PRESENTED BY S PRADEEP K SUNIL KUMAR III BTECH-II SEM, III BTECH-II SEM, C.S.E. C.S.E. pradeep585singana@gmail.com sunilkumar5b9@gmail.com CONTACT:
IMAGE PROCESSING PAPER PRESENTATION ON IMAGE PROCESSING PRESENTED BY S PRADEEP K SUNIL KUMAR III BTECH-II SEM, III BTECH-II SEM, C.S.E. C.S.E. pradeep585singana@gmail.com sunilkumar5b9@gmail.com CONTACT:
Optic Flow Based Skill Learning for A Humanoid to Trap, Approach to, and Pass a Ball
 Optic Flow Based Skill Learning for A Humanoid to Trap, Approach to, and Pass a Ball Masaki Ogino 1, Masaaki Kikuchi 1, Jun ichiro Ooga 1, Masahiro Aono 1 and Minoru Asada 1,2 1 Dept. of Adaptive Machine
Optic Flow Based Skill Learning for A Humanoid to Trap, Approach to, and Pass a Ball Masaki Ogino 1, Masaaki Kikuchi 1, Jun ichiro Ooga 1, Masahiro Aono 1 and Minoru Asada 1,2 1 Dept. of Adaptive Machine
Vishnu Nath. Usage of computer vision and humanoid robotics to create autonomous robots. (Ximea Currera RL04C Camera Kit)
") Vishnu Nath Usage of computer vision and humanoid robotics to create autonomous robots (Ximea Currera RL04C Camera Kit) Acknowledgements Firstly, I would like to thank Ivan Klimkovic of Ximea Corporation,
Vishnu Nath Usage of computer vision and humanoid robotics to create autonomous robots (Ximea Currera RL04C Camera Kit) Acknowledgements Firstly, I would like to thank Ivan Klimkovic of Ximea Corporation,
Quality Measure of Multicamera Image for Geometric Distortion
 Quality Measure of Multicamera for Geometric Distortion Mahesh G. Chinchole 1, Prof. Sanjeev.N.Jain 2 M.E. II nd Year student 1, Professor 2, Department of Electronics Engineering, SSVPSBSD College of
Quality Measure of Multicamera for Geometric Distortion Mahesh G. Chinchole 1, Prof. Sanjeev.N.Jain 2 M.E. II nd Year student 1, Professor 2, Department of Electronics Engineering, SSVPSBSD College of
Driver Assistance for "Keeping Hands on the Wheel and Eyes on the Road"
 ICVES 2009 Driver Assistance for "Keeping Hands on the Wheel and Eyes on the Road" Cuong Tran and Mohan Manubhai Trivedi Laboratory for Intelligent and Safe Automobiles (LISA) University of California
ICVES 2009 Driver Assistance for "Keeping Hands on the Wheel and Eyes on the Road" Cuong Tran and Mohan Manubhai Trivedi Laboratory for Intelligent and Safe Automobiles (LISA) University of California
Announcements. HW 6: Written (not programming) assignment. Assigned today; Due Friday, Dec. 9. to me.
 assignment. Assigned today; Due Friday, Dec. 9. to me.") Announcements HW 6: Written (not programming) assignment. Assigned today; Due Friday, Dec. 9. E-mail to me. Quiz 4 : OPTIONAL: Take home quiz, open book. If you re happy with your quiz grades so far, you
Announcements HW 6: Written (not programming) assignment. Assigned today; Due Friday, Dec. 9. E-mail to me. Quiz 4 : OPTIONAL: Take home quiz, open book. If you re happy with your quiz grades so far, you
Assignment: Cameras and Light
 Assignment: Cameras and Light Erik G. Learned-Miller April 5, 2011 1 For this assignment, I do not want you to do ANY collaboration whatsoever. It is important that you work through this assignment on
Assignment: Cameras and Light Erik G. Learned-Miller April 5, 2011 1 For this assignment, I do not want you to do ANY collaboration whatsoever. It is important that you work through this assignment on
MITOCW watch?v=7bachnlg8co
 MITOCW watch?v=7bachnlg8co The following content is provided under a Creative Commons license. Your support will help MIT OpenCourseWare continue to offer high-quality, educational resources for free.
MITOCW watch?v=7bachnlg8co The following content is provided under a Creative Commons license. Your support will help MIT OpenCourseWare continue to offer high-quality, educational resources for free.
Problem of the Month: Between the Lines
 Problem of the Month: Between the Lines Overview: In the Problem of the Month Between the Lines, students use polygons to solve problems involving area. The mathematical topics that underlie this POM are
Problem of the Month: Between the Lines Overview: In the Problem of the Month Between the Lines, students use polygons to solve problems involving area. The mathematical topics that underlie this POM are
Chapter 12 Image Processing
 Chapter 12 Image Processing The distance sensor on your self-driving car detects an object 100 m in front of your car. Are you following the car in front of you at a safe distance or has a pedestrian jumped
Chapter 12 Image Processing The distance sensor on your self-driving car detects an object 100 m in front of your car. Are you following the car in front of you at a safe distance or has a pedestrian jumped
3D display is imperfect, the contents stereoscopic video are not compatible, and viewing of the limitations of the environment make people feel
 3rd International Conference on Multimedia Technology ICMT 2013) Evaluation of visual comfort for stereoscopic video based on region segmentation Shigang Wang Xiaoyu Wang Yuanzhi Lv Abstract In order to
3rd International Conference on Multimedia Technology ICMT 2013) Evaluation of visual comfort for stereoscopic video based on region segmentation Shigang Wang Xiaoyu Wang Yuanzhi Lv Abstract In order to
Salient features make a search easy
 Chapter General discussion This thesis examined various aspects of haptic search. It consisted of three parts. In the first part, the saliency of movability and compliance were investigated. In the second
Chapter General discussion This thesis examined various aspects of haptic search. It consisted of three parts. In the first part, the saliency of movability and compliance were investigated. In the second
Behaviour-Based Control. IAR Lecture 5 Barbara Webb
 Behaviour-Based Control IAR Lecture 5 Barbara Webb Traditional sense-plan-act approach suggests a vertical (serial) task decomposition Sensors Actuators perception modelling planning task execution motor
Behaviour-Based Control IAR Lecture 5 Barbara Webb Traditional sense-plan-act approach suggests a vertical (serial) task decomposition Sensors Actuators perception modelling planning task execution motor
Adding Content and Adjusting Layers
 56 The Official Photodex Guide to ProShow Figure 3.10 Slide 3 uses reversed duplicates of one picture on two separate layers to create mirrored sets of frames and candles. (Notice that the Window Display
56 The Official Photodex Guide to ProShow Figure 3.10 Slide 3 uses reversed duplicates of one picture on two separate layers to create mirrored sets of frames and candles. (Notice that the Window Display
Multi Viewpoint Panoramas
 27. November 2007 1 Motivation 2 Methods Slit-Scan "The System" 3 "The System" Approach Preprocessing Surface Selection Panorama Creation Interactive Renement 4 Sources Motivation image showing long continous
27. November 2007 1 Motivation 2 Methods Slit-Scan "The System" 3 "The System" Approach Preprocessing Surface Selection Panorama Creation Interactive Renement 4 Sources Motivation image showing long continous
Graz University of Technology (Austria)
") Graz University of Technology (Austria) I am in charge of the Vision Based Measurement Group at Graz University of Technology. The research group is focused on two main areas: Object Category Recognition
Graz University of Technology (Austria) I am in charge of the Vision Based Measurement Group at Graz University of Technology. The research group is focused on two main areas: Object Category Recognition
The introduction and background in the previous chapters provided context in
 Chapter 3 3. Eye Tracking Instrumentation 3.1 Overview The introduction and background in the previous chapters provided context in which eye tracking systems have been used to study how people look at
Chapter 3 3. Eye Tracking Instrumentation 3.1 Overview The introduction and background in the previous chapters provided context in which eye tracking systems have been used to study how people look at
Touch Perception and Emotional Appraisal for a Virtual Agent
 Touch Perception and Emotional Appraisal for a Virtual Agent Nhung Nguyen, Ipke Wachsmuth, Stefan Kopp Faculty of Technology University of Bielefeld 33594 Bielefeld Germany {nnguyen, ipke, skopp}@techfak.uni-bielefeld.de
Touch Perception and Emotional Appraisal for a Virtual Agent Nhung Nguyen, Ipke Wachsmuth, Stefan Kopp Faculty of Technology University of Bielefeld 33594 Bielefeld Germany {nnguyen, ipke, skopp}@techfak.uni-bielefeld.de
Before How does the painting compare to the original figure? What do you expect will be true of the painted figure if it is painted to scale?
 Dilations LAUNCH (7 MIN) Before How does the painting compare to the original figure? What do you expect will be true of the painted figure if it is painted to scale? During What is the relationship between
Dilations LAUNCH (7 MIN) Before How does the painting compare to the original figure? What do you expect will be true of the painted figure if it is painted to scale? During What is the relationship between
Auditory System For a Mobile Robot
 Auditory System For a Mobile Robot PhD Thesis Jean-Marc Valin Department of Electrical Engineering and Computer Engineering Université de Sherbrooke, Québec, Canada Jean-Marc.Valin@USherbrooke.ca Motivations
Auditory System For a Mobile Robot PhD Thesis Jean-Marc Valin Department of Electrical Engineering and Computer Engineering Université de Sherbrooke, Québec, Canada Jean-Marc.Valin@USherbrooke.ca Motivations
p. 2 21st Century Learning Skills
 Contents: Lesson Focus & Standards p. 1 Review Prior Stages... p. 2 Vocabulary..... p. 2 Lesson Content... p. 3-7 Math Connection.... p. 8-9 Review... p. 10 Trivia. p. 10 21st Century Learning Skills Learning
Contents: Lesson Focus & Standards p. 1 Review Prior Stages... p. 2 Vocabulary..... p. 2 Lesson Content... p. 3-7 Math Connection.... p. 8-9 Review... p. 10 Trivia. p. 10 21st Century Learning Skills Learning
Visual Perception Based Behaviors for a Small Autonomous Mobile Robot
 Visual Perception Based Behaviors for a Small Autonomous Mobile Robot Scott Jantz and Keith L Doty Machine Intelligence Laboratory Mekatronix, Inc. Department of Electrical and Computer Engineering Gainesville,
Visual Perception Based Behaviors for a Small Autonomous Mobile Robot Scott Jantz and Keith L Doty Machine Intelligence Laboratory Mekatronix, Inc. Department of Electrical and Computer Engineering Gainesville,
ROBOT VISION. Dr.M.Madhavi, MED, MVSREC
 ROBOT VISION Dr.M.Madhavi, MED, MVSREC Robotic vision may be defined as the process of acquiring and extracting information from images of 3-D world. Robotic vision is primarily targeted at manipulation
ROBOT VISION Dr.M.Madhavi, MED, MVSREC Robotic vision may be defined as the process of acquiring and extracting information from images of 3-D world. Robotic vision is primarily targeted at manipulation
During What could you do to the angles to reliably compare their measures?
 Measuring Angles LAUNCH (9 MIN) Before What does the measure of an angle tell you? Can you compare the angles just by looking at them? During What could you do to the angles to reliably compare their measures?
Measuring Angles LAUNCH (9 MIN) Before What does the measure of an angle tell you? Can you compare the angles just by looking at them? During What could you do to the angles to reliably compare their measures?
Human Vision. Human Vision - Perception
 1 Human Vision SPATIAL ORIENTATION IN FLIGHT 2 Limitations of the Senses Visual Sense Nonvisual Senses SPATIAL ORIENTATION IN FLIGHT 3 Limitations of the Senses Visual Sense Nonvisual Senses Sluggish source
1 Human Vision SPATIAL ORIENTATION IN FLIGHT 2 Limitations of the Senses Visual Sense Nonvisual Senses SPATIAL ORIENTATION IN FLIGHT 3 Limitations of the Senses Visual Sense Nonvisual Senses Sluggish source
System of Recognizing Human Action by Mining in Time-Series Motion Logs and Applications
 The 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-22, 2010, Taipei, Taiwan System of Recognizing Human Action by Mining in Time-Series Motion Logs and Applications
The 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-22, 2010, Taipei, Taiwan System of Recognizing Human Action by Mining in Time-Series Motion Logs and Applications
3. Sound source location by difference of phase, on a hydrophone array with small dimensions. Abstract
 3. Sound source location by difference of phase, on a hydrophone array with small dimensions. Abstract A method for localizing calling animals was tested at the Research and Education Center "Dolphins
3. Sound source location by difference of phase, on a hydrophone array with small dimensions. Abstract A method for localizing calling animals was tested at the Research and Education Center "Dolphins
COMPARATIVE PERFORMANCE ANALYSIS OF HAND GESTURE RECOGNITION TECHNIQUES
 International Journal of Advanced Research in Engineering and Technology (IJARET) Volume 9, Issue 3, May - June 2018, pp. 177 185, Article ID: IJARET_09_03_023 Available online at http://www.iaeme.com/ijaret/issues.asp?jtype=ijaret&vtype=9&itype=3
International Journal of Advanced Research in Engineering and Technology (IJARET) Volume 9, Issue 3, May - June 2018, pp. 177 185, Article ID: IJARET_09_03_023 Available online at http://www.iaeme.com/ijaret/issues.asp?jtype=ijaret&vtype=9&itype=3
Computer Vision Slides curtesy of Professor Gregory Dudek
 Computer Vision Slides curtesy of Professor Gregory Dudek Ioannis Rekleitis Why vision? Passive (emits nothing). Discreet. Energy efficient. Intuitive. Powerful (works well for us, right?) Long and short
Computer Vision Slides curtesy of Professor Gregory Dudek Ioannis Rekleitis Why vision? Passive (emits nothing). Discreet. Energy efficient. Intuitive. Powerful (works well for us, right?) Long and short
Experiments with An Improved Iris Segmentation Algorithm
 Experiments with An Improved Iris Segmentation Algorithm Xiaomei Liu, Kevin W. Bowyer, Patrick J. Flynn Department of Computer Science and Engineering University of Notre Dame Notre Dame, IN 46556, U.S.A.
Experiments with An Improved Iris Segmentation Algorithm Xiaomei Liu, Kevin W. Bowyer, Patrick J. Flynn Department of Computer Science and Engineering University of Notre Dame Notre Dame, IN 46556, U.S.A.
JEPPIAAR ENGINEERING COLLEGE
 JEPPIAAR ENGINEERING COLLEGE Jeppiaar Nagar, Rajiv Gandhi Salai 600 119 DEPARTMENT OFMECHANICAL ENGINEERING QUESTION BANK VII SEMESTER ME6010 ROBOTICS Regulation 013 JEPPIAAR ENGINEERING COLLEGE Jeppiaar
JEPPIAAR ENGINEERING COLLEGE Jeppiaar Nagar, Rajiv Gandhi Salai 600 119 DEPARTMENT OFMECHANICAL ENGINEERING QUESTION BANK VII SEMESTER ME6010 ROBOTICS Regulation 013 JEPPIAAR ENGINEERING COLLEGE Jeppiaar
Sound Automata. Category: Physics: Force & Motion; Sound & Waves. Type: Make & Take. Rough Parts List: Tools List: Video:
 Sound Automata Category: Physics: Force & Motion; Sound & Waves Type: Make & Take Rough Parts List: 2 Clear plastic cups, large 2 Bamboo skewers 2 Straws 1 Sheet of cardboard or foam core 1 Bottle cap
Sound Automata Category: Physics: Force & Motion; Sound & Waves Type: Make & Take Rough Parts List: 2 Clear plastic cups, large 2 Bamboo skewers 2 Straws 1 Sheet of cardboard or foam core 1 Bottle cap
Sensor system of a small biped entertainment robot
 Advanced Robotics, Vol. 18, No. 10, pp. 1039 1052 (2004) VSP and Robotics Society of Japan 2004. Also available online - www.vsppub.com Sensor system of a small biped entertainment robot Short paper TATSUZO
Advanced Robotics, Vol. 18, No. 10, pp. 1039 1052 (2004) VSP and Robotics Society of Japan 2004. Also available online - www.vsppub.com Sensor system of a small biped entertainment robot Short paper TATSUZO
Color. Used heavily in human vision. Color is a pixel property, making some recognition problems easy
 Color Used heavily in human vision Color is a pixel property, making some recognition problems easy Visible spectrum for humans is 400 nm (blue) to 700 nm (red) Machines can see much more; ex. X-rays,
Color Used heavily in human vision Color is a pixel property, making some recognition problems easy Visible spectrum for humans is 400 nm (blue) to 700 nm (red) Machines can see much more; ex. X-rays,
Evolutions of communication
 Evolutions of communication Alex Bell, Andrew Pace, and Raul Santos May 12, 2009 Abstract In this paper a experiment is presented in which two simulated robots evolved a form of communication to allow
Evolutions of communication Alex Bell, Andrew Pace, and Raul Santos May 12, 2009 Abstract In this paper a experiment is presented in which two simulated robots evolved a form of communication to allow