Perception. Introduction to HRI Simmons & Nourbakhsh Spring 2015
|
|
|
- Posy Powers
- 6 years ago
- Views:
Transcription
1 Perception Introduction to HRI Simmons & Nourbakhsh Spring 2015
2 Perception my goals What is the state of the art boundary? Where might we be in 5-10 years?

3 The Perceptual Pipeline The classical approach: a serial pipeline Weak link analysis: each step depends on predecessors
4 Social Perception What features do we perceive for sociality? Is social perception a serial pipeline?
5 1. HRI for Human Perceptual Shifting

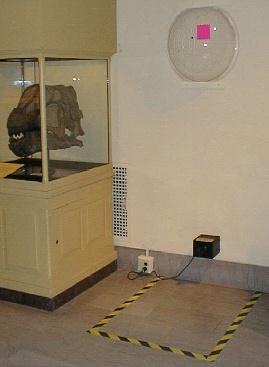
6 Insect Telepresence Educational telepresence designed using formal HCI inquiry tools.
7 Insect Telepresence Robot Problem Increase visitors engagement with and appreciation of insects in a museum terrarium at CMNH. Approach Provide a scalar telepresence experience with insect-safe visual browsing Apply HCI techniques to design and evaluate the input device and system Cultural modeling, expert interview, baseline observation Measure engagement indirectly by time on task Partner with HCII, CMNH


8 Insect Telepresence Robot Innovations Asymmetric exhibit layout Mechanical transparency Clutched gantry lever arm FOV-relative 3 DOF joystick

9 Insect Telepresence Robot
10 Insect Telepresence Robot Evaluation Results: Average group size: 3 Average age of users: 19.5 years Three age modes: 8 years, 10 years, and 35 years Average time on task of all users: 60 seconds Average time on task of a single user: 27 seconds Average time on task for user groups: 93 seconds Illah Nourbakhsh CMU Robotics Institute HRI Summer Course
11 2. Vision Sensors

12 The CCD (Charged Couple Device) - Exotic timing circuitry required - Uneven frequency response in electron wells - Color separation: filters versus splitting - Lossy data formats: NTSC and digital video > Credit:
 - Pixel/well measurement circuitry at along pixel - Real estate problems ; efficiency of")
13 The CMOS (Complementary Metal Oxide Semiconductor) - Standard chip fabrication techniques - Far lower power consumption overall (1:100) - Pixel/well measurement circuitry at along pixel - Real estate problems ; efficiency of photon usage
14 Human Vision High quality sensors color depth, dynamic range, light sensitivity, etc. Massive information fusion parallelism context-based reasoning active foveation and selective attention selective sensor fusion over space, capability and time tuned feedback from interpretation to first computation elegant and gradual failure characteristics
15 3. Machine Vision Poor-performance sensors 8/24 bits of color, little dynamic range, inaccuracy and warp, inconstant properties Narrow, shallow, fragile serial information processing information context typically as assumptions that violate little sensor fusion across type little sensor feedback loops across levels of interpretation very little temporal filtering and interpretation

16 Origins: Shakey

17 Origins: The Stanford Cart

18 Origins: The Stanford Cart
19 Passive versus Active Tradeoff The Passive/Active Design Question Sufficiency of natural contrast Interference between multiple robots System works in the dark System works in bright sunlight
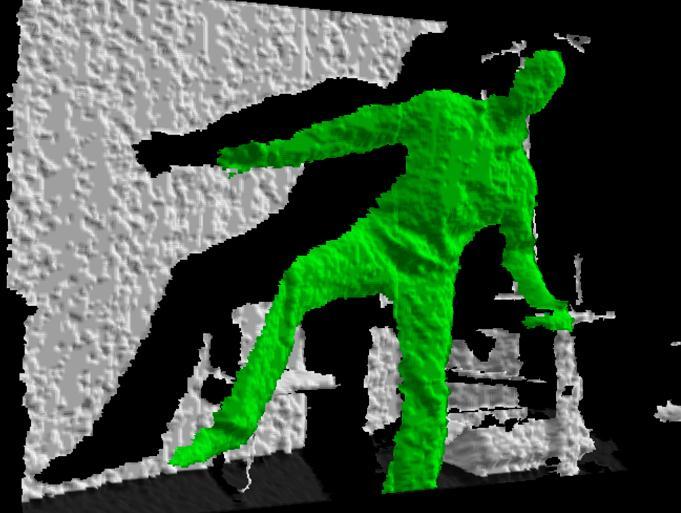
20 Visual Ranging for Social Interaction Totally safe obstacle detection Human-body spatial interaction Arms and gesture recognition Human-designed environment engagement
21 Vision-based Rangefinding Imaging chips collapse a 3D world onto a 2D plane Range inference from world knowledge / logical reasoning Range inference from camera parameters Range inference from disparity / matching
22 1/f = 1/d + 1/e Depth from Defocus

23 Depth from Defocus Pinhole camera no blurring Blur circle sensitivity inversely proportional to distance To calculate distance we must know focused image

24 Depth from Defocus
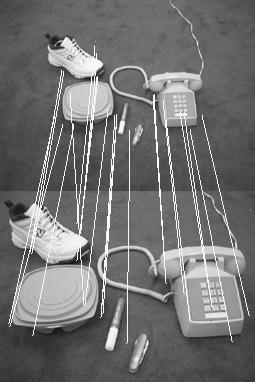
25 Depth from Disparity
26 Depth from Disparity Distance is inversely proportional to disparity Disparity is proportional to baseline Large baselines offer a tradeoff across range
27 The Feature Challenge Features must: provide sufficient density match across small viewpoint changes match across partial occlusions identify confidence Features must not: trigger false positive matches prove too sparse for the robot s task require on-line human tuning
28 Example: ZLoG Zero crossings of Laplacian of Gaussian Laplacian: second derivative convolution Gaussian: smoothing convolution Zero crossings: a sharp feature for interpolation

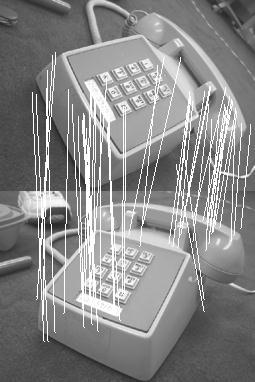
29 Stereo: Pictorial Example

30 Active Rangefinding

31
32
33 HRI Vision: the special-case approach

34 Example: Cueing in Kismet Color-based human-robot interaction Cueing, orthogonal events, child-based interaction Challenges: constancy, illumination, human expectation

35 Motivational example: RALPH

36 Navlab on Streets

37 Chips Museum Edubot - Chips Carnegie Museum of Natural History Autonomy 5 years, > 500 km navigated, auto-docking MTBF convergence at 1 week Proactive health state identification

38 Museum Edubot - Chips



39 Landmarks: Visual Fiducials

40 Minerva: an example of focused vision

41 Minerva: an example of focused vision

42 When special-case fails
43 SLAM
44 Visual SLAM Considerations Repeatable landmark recognition Feature locale Map-making Tracking robot position

45 The Future of Visual Navigation Hans Moravec s stereo-based voxel grid
46 Invariant features SIFT Features: image contents coded so they can be found again on other images of same scene, Invariant: despite many changes: rotation, translation camera viewpoint: scale, perspective illumination noise occlusion Image matching by comparing invariant features Notion of Interesting points and Keypoints


47 Gaussian pyramid Scale smoothing parameter Increase -> no need to retain all pixels Stored image can be reduced in size Increasing sigma Gaussian pyramid


48 1. Scale-space extrema detection Gaussian Pyramid processed one octave at a time Blurs DoGs

49 2. Keypoint localization Detect maxima and minima of difference-of-gaussian in scale space Reject points lying on edges Fit a quadratic to surrounding values for sub-pixel and subscale interpolation

50 4. SIFT vector formation Thresholded image gradients are sampled over 16x16 array of locations in scale space Create array of orientation histograms 8 orientations x 4x4 histogram array = 128 dimensions

51 Keypoints Sampled regions located at interest points Local invariant descriptors to scale and rotation ( ) local descriptor Local: robust to occlusion/clutter + no segmentation Invariant: to image transformations + illumination changes

52 SIFT Features Very powerful method developed by David Lowe, Vancouver Image content is transformed into local feature coordinates that are invariant to translation, rotation, scale, and other imaging parameters SIFT Features
53 SIFT

54 Example: K9 Science Rover

55 Example: K9 Science Rover s SIFT
56 4. Social Vision State of Art Face detection, recognition Speech understanding Gesture understanding

57 Face Detection How would you detect faces in images?


58 Face Detection How would you detect faces in images?

59 Face Detection How would you detect faces in images?

60 Expression Detection

61 First Person Vision
62 Speech and Gesture Understanding Time for some fun:
Midterm Examination CS 534: Computational Photography
 Midterm Examination CS 534: Computational Photography November 3, 2015 NAME: SOLUTIONS Problem Score Max Score 1 8 2 8 3 9 4 4 5 3 6 4 7 6 8 13 9 7 10 4 11 7 12 10 13 9 14 8 Total 100 1 1. [8] What are
Midterm Examination CS 534: Computational Photography November 3, 2015 NAME: SOLUTIONS Problem Score Max Score 1 8 2 8 3 9 4 4 5 3 6 4 7 6 8 13 9 7 10 4 11 7 12 10 13 9 14 8 Total 100 1 1. [8] What are
Study guide for Graduate Computer Vision
 Study guide for Graduate Computer Vision Erik G. Learned-Miller Department of Computer Science University of Massachusetts, Amherst Amherst, MA 01003 November 23, 2011 Abstract 1 1. Know Bayes rule. What
Study guide for Graduate Computer Vision Erik G. Learned-Miller Department of Computer Science University of Massachusetts, Amherst Amherst, MA 01003 November 23, 2011 Abstract 1 1. Know Bayes rule. What
Computer Vision Slides curtesy of Professor Gregory Dudek
 Computer Vision Slides curtesy of Professor Gregory Dudek Ioannis Rekleitis Why vision? Passive (emits nothing). Discreet. Energy efficient. Intuitive. Powerful (works well for us, right?) Long and short
Computer Vision Slides curtesy of Professor Gregory Dudek Ioannis Rekleitis Why vision? Passive (emits nothing). Discreet. Energy efficient. Intuitive. Powerful (works well for us, right?) Long and short
Efficient Construction of SIFT Multi-Scale Image Pyramids for Embedded Robot Vision
 Efficient Construction of SIFT Multi-Scale Image Pyramids for Embedded Robot Vision Peter Andreas Entschev and Hugo Vieira Neto Graduate School of Electrical Engineering and Applied Computer Science Federal
Efficient Construction of SIFT Multi-Scale Image Pyramids for Embedded Robot Vision Peter Andreas Entschev and Hugo Vieira Neto Graduate School of Electrical Engineering and Applied Computer Science Federal
CSC 320 H1S CSC320 Exam Study Guide (Last updated: April 2, 2015) Winter 2015
 Winter 2015") Question 1. Suppose you have an image I that contains an image of a left eye (the image is detailed enough that it makes a difference that it s the left eye). Write pseudocode to find other left eyes in
Question 1. Suppose you have an image I that contains an image of a left eye (the image is detailed enough that it makes a difference that it s the left eye). Write pseudocode to find other left eyes in
Image Formation and Capture
 Figure credits: B. Curless, E. Hecht, W.J. Smith, B.K.P. Horn, A. Theuwissen, and J. Malik Image Formation and Capture COS 429: Computer Vision Image Formation and Capture Real world Optics Sensor Devices
Figure credits: B. Curless, E. Hecht, W.J. Smith, B.K.P. Horn, A. Theuwissen, and J. Malik Image Formation and Capture COS 429: Computer Vision Image Formation and Capture Real world Optics Sensor Devices
Exercise questions for Machine vision
 Exercise questions for Machine vision This is a collection of exercise questions. These questions are all examination alike which means that similar questions may appear at the written exam. I ve divided
Exercise questions for Machine vision This is a collection of exercise questions. These questions are all examination alike which means that similar questions may appear at the written exam. I ve divided
Evaluating the stability of SIFT keypoints across cameras
 Evaluating the stability of SIFT keypoints across cameras Max Van Kleek Agent-based Intelligent Reactive Environments MIT CSAIL emax@csail.mit.edu ABSTRACT Object identification using Scale-Invariant Feature
Evaluating the stability of SIFT keypoints across cameras Max Van Kleek Agent-based Intelligent Reactive Environments MIT CSAIL emax@csail.mit.edu ABSTRACT Object identification using Scale-Invariant Feature
Perception. Read: AIMA Chapter 24 & Chapter HW#8 due today. Vision
 11-25-2013 Perception Vision Read: AIMA Chapter 24 & Chapter 25.3 HW#8 due today visual aural haptic & tactile vestibular (balance: equilibrium, acceleration, and orientation wrt gravity) olfactory taste
11-25-2013 Perception Vision Read: AIMA Chapter 24 & Chapter 25.3 HW#8 due today visual aural haptic & tactile vestibular (balance: equilibrium, acceleration, and orientation wrt gravity) olfactory taste
Improved SIFT Matching for Image Pairs with a Scale Difference
 Improved SIFT Matching for Image Pairs with a Scale Difference Y. Bastanlar, A. Temizel and Y. Yardımcı Informatics Institute, Middle East Technical University, Ankara, 06531, Turkey Published in IET Electronics,
Improved SIFT Matching for Image Pairs with a Scale Difference Y. Bastanlar, A. Temizel and Y. Yardımcı Informatics Institute, Middle East Technical University, Ankara, 06531, Turkey Published in IET Electronics,
EC-433 Digital Image Processing
 EC-433 Digital Image Processing Lecture 2 Digital Image Fundamentals Dr. Arslan Shaukat 1 Fundamental Steps in DIP Image Acquisition An image is captured by a sensor (such as a monochrome or color TV camera)
EC-433 Digital Image Processing Lecture 2 Digital Image Fundamentals Dr. Arslan Shaukat 1 Fundamental Steps in DIP Image Acquisition An image is captured by a sensor (such as a monochrome or color TV camera)
Lecture 19: Depth Cameras. Kayvon Fatahalian CMU : Graphics and Imaging Architectures (Fall 2011)
") Lecture 19: Depth Cameras Kayvon Fatahalian CMU 15-869: Graphics and Imaging Architectures (Fall 2011) Continuing theme: computational photography Cheap cameras capture light, extensive processing produces
Lecture 19: Depth Cameras Kayvon Fatahalian CMU 15-869: Graphics and Imaging Architectures (Fall 2011) Continuing theme: computational photography Cheap cameras capture light, extensive processing produces
Computer Vision. Howie Choset Introduction to Robotics
 Computer Vision Howie Choset http://www.cs.cmu.edu.edu/~choset Introduction to Robotics http://generalrobotics.org What is vision? What is computer vision? Edge Detection Edge Detection Interest points
Computer Vision Howie Choset http://www.cs.cmu.edu.edu/~choset Introduction to Robotics http://generalrobotics.org What is vision? What is computer vision? Edge Detection Edge Detection Interest points
23270: AUGMENTED REALITY FOR NAVIGATION AND INFORMATIONAL ADAS. Sergii Bykov Technical Lead Machine Learning 12 Oct 2017
 23270: AUGMENTED REALITY FOR NAVIGATION AND INFORMATIONAL ADAS Sergii Bykov Technical Lead Machine Learning 12 Oct 2017 Product Vision Company Introduction Apostera GmbH with headquarter in Munich, was
23270: AUGMENTED REALITY FOR NAVIGATION AND INFORMATIONAL ADAS Sergii Bykov Technical Lead Machine Learning 12 Oct 2017 Product Vision Company Introduction Apostera GmbH with headquarter in Munich, was
MEM455/800 Robotics II/Advance Robotics Winter 2009
 Admin Stuff Course Website: http://robotics.mem.drexel.edu/mhsieh/courses/mem456/ MEM455/8 Robotics II/Advance Robotics Winter 9 Professor: Ani Hsieh Time: :-:pm Tues, Thurs Location: UG Lab, Classroom
Admin Stuff Course Website: http://robotics.mem.drexel.edu/mhsieh/courses/mem456/ MEM455/8 Robotics II/Advance Robotics Winter 9 Professor: Ani Hsieh Time: :-:pm Tues, Thurs Location: UG Lab, Classroom
Range Sensing strategies
 Range Sensing strategies Active range sensors Ultrasound Laser range sensor Slides adopted from Siegwart and Nourbakhsh 4.1.6 Range Sensors (time of flight) (1) Large range distance measurement -> called
Range Sensing strategies Active range sensors Ultrasound Laser range sensor Slides adopted from Siegwart and Nourbakhsh 4.1.6 Range Sensors (time of flight) (1) Large range distance measurement -> called
SUPER RESOLUTION INTRODUCTION
 SUPER RESOLUTION Jnanavardhini - Online MultiDisciplinary Research Journal Ms. Amalorpavam.G Assistant Professor, Department of Computer Sciences, Sambhram Academy of Management. Studies, Bangalore Abstract:-
SUPER RESOLUTION Jnanavardhini - Online MultiDisciplinary Research Journal Ms. Amalorpavam.G Assistant Professor, Department of Computer Sciences, Sambhram Academy of Management. Studies, Bangalore Abstract:-
VC 11/12 T2 Image Formation
 VC 11/12 T2 Image Formation Mestrado em Ciência de Computadores Mestrado Integrado em Engenharia de Redes e Sistemas Informáticos Miguel Tavares Coimbra Outline Computer Vision? The Human Visual System
VC 11/12 T2 Image Formation Mestrado em Ciência de Computadores Mestrado Integrado em Engenharia de Redes e Sistemas Informáticos Miguel Tavares Coimbra Outline Computer Vision? The Human Visual System
Table of contents. Vision industrielle 2002/2003. Local and semi-local smoothing. Linear noise filtering: example. Convolution: introduction
 Table of contents Vision industrielle 2002/2003 Session - Image Processing Département Génie Productique INSA de Lyon Christian Wolf wolf@rfv.insa-lyon.fr Introduction Motivation, human vision, history,
Table of contents Vision industrielle 2002/2003 Session - Image Processing Département Génie Productique INSA de Lyon Christian Wolf wolf@rfv.insa-lyon.fr Introduction Motivation, human vision, history,
[2] Brajovic, V. and T. Kanade, Computational Sensors for Global Operations, IUS Proceedings,
![[2] Brajovic, V. and T. Kanade, Computational Sensors for Global Operations, IUS Proceedings,](/thumbs/78/78016624.jpg "[2] Brajovic, V. and T. Kanade, Computational Sensors for Global Operations, IUS Proceedings,") page 14 page 13 References [1] Ballard, D.H. and C.M. Brown, Computer Vision, Prentice-Hall, 1982. [2] Brajovic, V. and T. Kanade, Computational Sensors for Global Operations, IUS Proceedings, pp. 621-630,
page 14 page 13 References [1] Ballard, D.H. and C.M. Brown, Computer Vision, Prentice-Hall, 1982. [2] Brajovic, V. and T. Kanade, Computational Sensors for Global Operations, IUS Proceedings, pp. 621-630,
Vision Review: Image Processing. Course web page:
 Vision Review: Image Processing Course web page: www.cis.udel.edu/~cer/arv September 7, Announcements Homework and paper presentation guidelines are up on web page Readings for next Tuesday: Chapters 6,.,
Vision Review: Image Processing Course web page: www.cis.udel.edu/~cer/arv September 7, Announcements Homework and paper presentation guidelines are up on web page Readings for next Tuesday: Chapters 6,.,
Optical Flow Estimation. Using High Frame Rate Sequences
 Optical Flow Estimation Using High Frame Rate Sequences Suk Hwan Lim and Abbas El Gamal Programmable Digital Camera Project Department of Electrical Engineering, Stanford University, CA 94305, USA ICIP
Optical Flow Estimation Using High Frame Rate Sequences Suk Hwan Lim and Abbas El Gamal Programmable Digital Camera Project Department of Electrical Engineering, Stanford University, CA 94305, USA ICIP
CPSC 340: Machine Learning and Data Mining. Convolutional Neural Networks Fall 2018
 CPSC 340: Machine Learning and Data Mining Convolutional Neural Networks Fall 2018 Admin Mike and I finish CNNs on Wednesday. After that, we will cover different topics: Mike will do a demo of training
CPSC 340: Machine Learning and Data Mining Convolutional Neural Networks Fall 2018 Admin Mike and I finish CNNs on Wednesday. After that, we will cover different topics: Mike will do a demo of training
VC 14/15 TP2 Image Formation
 VC 14/15 TP2 Image Formation Mestrado em Ciência de Computadores Mestrado Integrado em Engenharia de Redes e Sistemas Informáticos Miguel Tavares Coimbra Outline Computer Vision? The Human Visual System
VC 14/15 TP2 Image Formation Mestrado em Ciência de Computadores Mestrado Integrado em Engenharia de Redes e Sistemas Informáticos Miguel Tavares Coimbra Outline Computer Vision? The Human Visual System
Computational Cameras. Rahul Raguram COMP
 Computational Cameras Rahul Raguram COMP 790-090 What is a computational camera? Camera optics Camera sensor 3D scene Traditional camera Final image Modified optics Camera sensor Image Compute 3D scene
Computational Cameras Rahul Raguram COMP 790-090 What is a computational camera? Camera optics Camera sensor 3D scene Traditional camera Final image Modified optics Camera sensor Image Compute 3D scene
Design of Temporally Dithered Codes for Increased Depth of Field in Structured Light Systems
 Design of Temporally Dithered Codes for Increased Depth of Field in Structured Light Systems Ricardo R. Garcia University of California, Berkeley Berkeley, CA rrgarcia@eecs.berkeley.edu Abstract In recent
Design of Temporally Dithered Codes for Increased Depth of Field in Structured Light Systems Ricardo R. Garcia University of California, Berkeley Berkeley, CA rrgarcia@eecs.berkeley.edu Abstract In recent
Digital Image Processing
 Digital Image Processing Digital Imaging Fundamentals Christophoros Nikou cnikou@cs.uoi.gr Images taken from: R. Gonzalez and R. Woods. Digital Image Processing, Prentice Hall, 2008. Digital Image Processing
Digital Image Processing Digital Imaging Fundamentals Christophoros Nikou cnikou@cs.uoi.gr Images taken from: R. Gonzalez and R. Woods. Digital Image Processing, Prentice Hall, 2008. Digital Image Processing
8.2 IMAGE PROCESSING VERSUS IMAGE ANALYSIS Image processing: The collection of routines and
 8.1 INTRODUCTION In this chapter, we will study and discuss some fundamental techniques for image processing and image analysis, with a few examples of routines developed for certain purposes. 8.2 IMAGE
8.1 INTRODUCTION In this chapter, we will study and discuss some fundamental techniques for image processing and image analysis, with a few examples of routines developed for certain purposes. 8.2 IMAGE
ELEC Dr Reji Mathew Electrical Engineering UNSW
 ELEC 4622 Dr Reji Mathew Electrical Engineering UNSW Multi-Resolution Processing Gaussian Pyramid Starting with an image x[n], which we will also label x 0 [n], Construct a sequence of progressively lower
ELEC 4622 Dr Reji Mathew Electrical Engineering UNSW Multi-Resolution Processing Gaussian Pyramid Starting with an image x[n], which we will also label x 0 [n], Construct a sequence of progressively lower
Digital Image Fundamentals. Digital Image Processing. Human Visual System. Contents. Structure Of The Human Eye (cont.) Structure Of The Human Eye
 Structure Of The Human Eye") Digital Image Processing 2 Digital Image Fundamentals Digital Imaging Fundamentals Christophoros Nikou cnikou@cs.uoi.gr Those who wish to succeed must ask the right preliminary questions Aristotle Images
Digital Image Processing 2 Digital Image Fundamentals Digital Imaging Fundamentals Christophoros Nikou cnikou@cs.uoi.gr Those who wish to succeed must ask the right preliminary questions Aristotle Images
Digital Image Fundamentals. Digital Image Processing. Human Visual System. Contents. Structure Of The Human Eye (cont.) Structure Of The Human Eye
 Structure Of The Human Eye") Digital Image Processing 2 Digital Image Fundamentals Digital Imaging Fundamentals Christophoros Nikou cnikou@cs.uoi.gr Images taken from: R. Gonzalez and R. Woods. Digital Image Processing, Prentice Hall,
Digital Image Processing 2 Digital Image Fundamentals Digital Imaging Fundamentals Christophoros Nikou cnikou@cs.uoi.gr Images taken from: R. Gonzalez and R. Woods. Digital Image Processing, Prentice Hall,
Image Processing for feature extraction
 Image Processing for feature extraction 1 Outline Rationale for image pre-processing Gray-scale transformations Geometric transformations Local preprocessing Reading: Sonka et al 5.1, 5.2, 5.3 2 Image
Image Processing for feature extraction 1 Outline Rationale for image pre-processing Gray-scale transformations Geometric transformations Local preprocessing Reading: Sonka et al 5.1, 5.2, 5.3 2 Image
Digital Image Processing
 Digital Image Processing Digital Imaging Fundamentals Christophoros Nikou cnikou@cs.uoi.gr Images taken from: R. Gonzalez and R. Woods. Digital Image Processing, Prentice Hall, 2008. Digital Image Processing
Digital Image Processing Digital Imaging Fundamentals Christophoros Nikou cnikou@cs.uoi.gr Images taken from: R. Gonzalez and R. Woods. Digital Image Processing, Prentice Hall, 2008. Digital Image Processing
Dappled Photography: Mask Enhanced Cameras for Heterodyned Light Fields and Coded Aperture Refocusing
 Dappled Photography: Mask Enhanced Cameras for Heterodyned Light Fields and Coded Aperture Refocusing Ashok Veeraraghavan, Ramesh Raskar, Ankit Mohan & Jack Tumblin Amit Agrawal, Mitsubishi Electric Research
Dappled Photography: Mask Enhanced Cameras for Heterodyned Light Fields and Coded Aperture Refocusing Ashok Veeraraghavan, Ramesh Raskar, Ankit Mohan & Jack Tumblin Amit Agrawal, Mitsubishi Electric Research
Image acquisition. In both cases, the digital sensing element is one of the following: Line array Area array. Single sensor
 Image acquisition Digital images are acquired by direct digital acquisition (digital still/video cameras), or scanning material acquired as analog signals (slides, photographs, etc.). In both cases, the
Image acquisition Digital images are acquired by direct digital acquisition (digital still/video cameras), or scanning material acquired as analog signals (slides, photographs, etc.). In both cases, the
A Sorting Image Sensor: An Example of Massively Parallel Intensity to Time Processing for Low Latency Computational Sensors
 Proceedings of the 1996 IEEE International Conference on Robotics and Automation Minneapolis, Minnesota April 1996 A Sorting Image Sensor: An Example of Massively Parallel Intensity to Time Processing
Proceedings of the 1996 IEEE International Conference on Robotics and Automation Minneapolis, Minnesota April 1996 A Sorting Image Sensor: An Example of Massively Parallel Intensity to Time Processing
Cameras have finite depth of field or depth of focus
 Robert Allison, Laurie Wilcox and James Elder Centre for Vision Research York University Cameras have finite depth of field or depth of focus Quantified by depth that elicits a given amount of blur Typically
Robert Allison, Laurie Wilcox and James Elder Centre for Vision Research York University Cameras have finite depth of field or depth of focus Quantified by depth that elicits a given amount of blur Typically
A Foveated Visual Tracking Chip
 TP 2.1: A Foveated Visual Tracking Chip Ralph Etienne-Cummings¹, ², Jan Van der Spiegel¹, ³, Paul Mueller¹, Mao-zhu Zhang¹ ¹Corticon Inc., Philadelphia, PA ²Department of Electrical Engineering, Southern
TP 2.1: A Foveated Visual Tracking Chip Ralph Etienne-Cummings¹, ², Jan Van der Spiegel¹, ³, Paul Mueller¹, Mao-zhu Zhang¹ ¹Corticon Inc., Philadelphia, PA ²Department of Electrical Engineering, Southern
Image Processing COS 426
 Image Processing COS 426 What is a Digital Image? A digital image is a discrete array of samples representing a continuous 2D function Continuous function Discrete samples Limitations on Digital Images
Image Processing COS 426 What is a Digital Image? A digital image is a discrete array of samples representing a continuous 2D function Continuous function Discrete samples Limitations on Digital Images
Image Processing by Bilateral Filtering Method
 ABHIYANTRIKI An International Journal of Engineering & Technology (A Peer Reviewed & Indexed Journal) Vol. 3, No. 4 (April, 2016) http://www.aijet.in/ eissn: 2394-627X Image Processing by Bilateral Image
ABHIYANTRIKI An International Journal of Engineering & Technology (A Peer Reviewed & Indexed Journal) Vol. 3, No. 4 (April, 2016) http://www.aijet.in/ eissn: 2394-627X Image Processing by Bilateral Image
IMAGE PROCESSING PAPER PRESENTATION ON IMAGE PROCESSING
 IMAGE PROCESSING PAPER PRESENTATION ON IMAGE PROCESSING PRESENTED BY S PRADEEP K SUNIL KUMAR III BTECH-II SEM, III BTECH-II SEM, C.S.E. C.S.E. pradeep585singana@gmail.com sunilkumar5b9@gmail.com CONTACT:
IMAGE PROCESSING PAPER PRESENTATION ON IMAGE PROCESSING PRESENTED BY S PRADEEP K SUNIL KUMAR III BTECH-II SEM, III BTECH-II SEM, C.S.E. C.S.E. pradeep585singana@gmail.com sunilkumar5b9@gmail.com CONTACT:
Object Recognition + Gesture Recognition
 Object Recognition + Gesture Recognition Matt Loper CS148 Nov 1st, 2007 Motivation Consider the robot control loop Compare it to a human Decision Making Actuators World Perception Sensors Motivation Consider
Object Recognition + Gesture Recognition Matt Loper CS148 Nov 1st, 2007 Motivation Consider the robot control loop Compare it to a human Decision Making Actuators World Perception Sensors Motivation Consider
Digital Photographs and Matrices
 Digital Photographs and Matrices Digital Camera Image Sensors Electron Counts Checkerboard Analogy Bryce Bayer s Color Filter Array Mosaic. Image Sensor Data to Matrix Data Visualization of Matrix Addition
Digital Photographs and Matrices Digital Camera Image Sensors Electron Counts Checkerboard Analogy Bryce Bayer s Color Filter Array Mosaic. Image Sensor Data to Matrix Data Visualization of Matrix Addition
Deconvolution , , Computational Photography Fall 2018, Lecture 12
 Deconvolution http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 12 Course announcements Homework 3 is out. - Due October 12 th. - Any questions?
Deconvolution http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 12 Course announcements Homework 3 is out. - Due October 12 th. - Any questions?
General Imaging System
 General Imaging System Lecture Slides ME 4060 Machine Vision and Vision-based Control Chapter 5 Image Sensing and Acquisition By Dr. Debao Zhou 1 2 Light, Color, and Electromagnetic Spectrum Penetrate
General Imaging System Lecture Slides ME 4060 Machine Vision and Vision-based Control Chapter 5 Image Sensing and Acquisition By Dr. Debao Zhou 1 2 Light, Color, and Electromagnetic Spectrum Penetrate
SYLLABUS CHAPTER - 2 : INTENSITY TRANSFORMATIONS. Some Basic Intensity Transformation Functions, Histogram Processing.
 Contents i SYLLABUS UNIT - I CHAPTER - 1 : INTRODUCTION TO DIGITAL IMAGE PROCESSING Introduction, Origins of Digital Image Processing, Applications of Digital Image Processing, Fundamental Steps, Components,
Contents i SYLLABUS UNIT - I CHAPTER - 1 : INTRODUCTION TO DIGITAL IMAGE PROCESSING Introduction, Origins of Digital Image Processing, Applications of Digital Image Processing, Fundamental Steps, Components,
Video Synthesis System for Monitoring Closed Sections 1
 Video Synthesis System for Monitoring Closed Sections 1 Taehyeong Kim *, 2 Bum-Jin Park 1 Senior Researcher, Korea Institute of Construction Technology, Korea 2 Senior Researcher, Korea Institute of Construction
Video Synthesis System for Monitoring Closed Sections 1 Taehyeong Kim *, 2 Bum-Jin Park 1 Senior Researcher, Korea Institute of Construction Technology, Korea 2 Senior Researcher, Korea Institute of Construction
Cvision 2. António J. R. Neves João Paulo Silva Cunha. Bernardo Cunha. IEETA / Universidade de Aveiro
 Cvision 2 Digital Imaging António J. R. Neves (an@ua.pt) & João Paulo Silva Cunha & Bernardo Cunha IEETA / Universidade de Aveiro Outline Image sensors Camera calibration Sampling and quantization Data
Cvision 2 Digital Imaging António J. R. Neves (an@ua.pt) & João Paulo Silva Cunha & Bernardo Cunha IEETA / Universidade de Aveiro Outline Image sensors Camera calibration Sampling and quantization Data
Lecture 18: Light field cameras. (plenoptic cameras) Visual Computing Systems CMU , Fall 2013
 Visual Computing Systems CMU , Fall 2013") Lecture 18: Light field cameras (plenoptic cameras) Visual Computing Systems Continuing theme: computational photography Cameras capture light, then extensive processing produces the desired image Today:
Lecture 18: Light field cameras (plenoptic cameras) Visual Computing Systems Continuing theme: computational photography Cameras capture light, then extensive processing produces the desired image Today:
High Speed vslam Using System-on-Chip Based Vision. Jörgen Lidholm Mälardalen University Västerås, Sweden
 High Speed vslam Using System-on-Chip Based Vision Jörgen Lidholm Mälardalen University Västerås, Sweden jorgen.lidholm@mdh.se February 28, 2007 1 The ChipVision Project Within the ChipVision project we
High Speed vslam Using System-on-Chip Based Vision Jörgen Lidholm Mälardalen University Västerås, Sweden jorgen.lidholm@mdh.se February 28, 2007 1 The ChipVision Project Within the ChipVision project we
 Project 4 Results http://www.cs.brown.edu/courses/cs129/results/proj4/jcmace/ http://www.cs.brown.edu/courses/cs129/results/proj4/damoreno/ http://www.cs.brown.edu/courses/csci1290/results/proj4/huag/
Project 4 Results http://www.cs.brown.edu/courses/cs129/results/proj4/jcmace/ http://www.cs.brown.edu/courses/cs129/results/proj4/damoreno/ http://www.cs.brown.edu/courses/csci1290/results/proj4/huag/
COS Lecture 1 Autonomous Robot Navigation
 COS 495 - Lecture 1 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Introduction Education B.Sc.Eng Engineering Phyics, Queen s University
COS 495 - Lecture 1 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Introduction Education B.Sc.Eng Engineering Phyics, Queen s University
Introduction. Prof. Lina Karam School of Electrical, Computer, & Energy Engineering Arizona State University
 EEE 508 - Digital Image & Video Processing and Compression http://lina.faculty.asu.edu/eee508/ Introduction Prof. Lina Karam School of Electrical, Computer, & Energy Engineering Arizona State University
EEE 508 - Digital Image & Video Processing and Compression http://lina.faculty.asu.edu/eee508/ Introduction Prof. Lina Karam School of Electrical, Computer, & Energy Engineering Arizona State University
Basic principles of photography. David Capel 346B IST
 Basic principles of photography David Capel 346B IST Latin Camera Obscura = Dark Room Light passing through a small hole produces an inverted image on the opposite wall Safely observing the solar eclipse
Basic principles of photography David Capel 346B IST Latin Camera Obscura = Dark Room Light passing through a small hole produces an inverted image on the opposite wall Safely observing the solar eclipse
ME 6406 MACHINE VISION. Georgia Institute of Technology
 ME 6406 MACHINE VISION Georgia Institute of Technology Class Information Instructor Professor Kok-Meng Lee MARC 474 Office hours: Tues/Thurs 1:00-2:00 pm kokmeng.lee@me.gatech.edu (404)-894-7402 Class
ME 6406 MACHINE VISION Georgia Institute of Technology Class Information Instructor Professor Kok-Meng Lee MARC 474 Office hours: Tues/Thurs 1:00-2:00 pm kokmeng.lee@me.gatech.edu (404)-894-7402 Class
VICs: A Modular Vision-Based HCI Framework
 VICs: A Modular Vision-Based HCI Framework The Visual Interaction Cues Project Guangqi Ye, Jason Corso Darius Burschka, & Greg Hager CIRL, 1 Today, I ll be presenting work that is part of an ongoing project
VICs: A Modular Vision-Based HCI Framework The Visual Interaction Cues Project Guangqi Ye, Jason Corso Darius Burschka, & Greg Hager CIRL, 1 Today, I ll be presenting work that is part of an ongoing project
How does prism technology help to achieve superior color image quality?
 WHITE PAPER How does prism technology help to achieve superior color image quality? Achieving superior image quality requires real and full color depth for every channel, improved color contrast and color
WHITE PAPER How does prism technology help to achieve superior color image quality? Achieving superior image quality requires real and full color depth for every channel, improved color contrast and color
VC 16/17 TP2 Image Formation
 VC 16/17 TP2 Image Formation Mestrado em Ciência de Computadores Mestrado Integrado em Engenharia de Redes e Sistemas Informáticos Hélder Filipe Pinto de Oliveira Outline Computer Vision? The Human Visual
VC 16/17 TP2 Image Formation Mestrado em Ciência de Computadores Mestrado Integrado em Engenharia de Redes e Sistemas Informáticos Hélder Filipe Pinto de Oliveira Outline Computer Vision? The Human Visual
Perception. What We Will Cover in This Section. Perception. How we interpret the information our senses receive. Overview Perception
 Perception 10/3/2002 Perception.ppt 1 What We Will Cover in This Section Overview Perception Visual perception. Organizing principles. 10/3/2002 Perception.ppt 2 Perception How we interpret the information
Perception 10/3/2002 Perception.ppt 1 What We Will Cover in This Section Overview Perception Visual perception. Organizing principles. 10/3/2002 Perception.ppt 2 Perception How we interpret the information
EXPERIMENTAL BILATERAL CONTROL TELEMANIPULATION USING A VIRTUAL EXOSKELETON
 EXPERIMENTAL BILATERAL CONTROL TELEMANIPULATION USING A VIRTUAL EXOSKELETON Josep Amat 1, Alícia Casals 2, Manel Frigola 2, Enric Martín 2 1Robotics Institute. (IRI) UPC / CSIC Llorens Artigas 4-6, 2a
EXPERIMENTAL BILATERAL CONTROL TELEMANIPULATION USING A VIRTUAL EXOSKELETON Josep Amat 1, Alícia Casals 2, Manel Frigola 2, Enric Martín 2 1Robotics Institute. (IRI) UPC / CSIC Llorens Artigas 4-6, 2a
Image Enhancement. DD2423 Image Analysis and Computer Vision. Computational Vision and Active Perception School of Computer Science and Communication
 Image Enhancement DD2423 Image Analysis and Computer Vision Mårten Björkman Computational Vision and Active Perception School of Computer Science and Communication November 15, 2013 Mårten Björkman (CVAP)
Image Enhancement DD2423 Image Analysis and Computer Vision Mårten Björkman Computational Vision and Active Perception School of Computer Science and Communication November 15, 2013 Mårten Björkman (CVAP)
Lecture 8. Human Information Processing (1) CENG 412-Human Factors in Engineering May
 CENG 412-Human Factors in Engineering May") Lecture 8. Human Information Processing (1) CENG 412-Human Factors in Engineering May 30 2009 1 Outline Visual Sensory systems Reading Wickens pp. 61-91 2 Today s story: Textbook page 61. List the vision-related
Lecture 8. Human Information Processing (1) CENG 412-Human Factors in Engineering May 30 2009 1 Outline Visual Sensory systems Reading Wickens pp. 61-91 2 Today s story: Textbook page 61. List the vision-related
Cameras. Shrinking the aperture. Camera trial #1. Pinhole camera. Digital Visual Effects Yung-Yu Chuang. Put a piece of film in front of an object.
 Camera trial #1 Cameras Digital Visual Effects Yung-Yu Chuang scene film with slides by Fredo Durand, Brian Curless, Steve Seitz and Alexei Efros Put a piece of film in front of an object. Pinhole camera
Camera trial #1 Cameras Digital Visual Effects Yung-Yu Chuang scene film with slides by Fredo Durand, Brian Curless, Steve Seitz and Alexei Efros Put a piece of film in front of an object. Pinhole camera
Depth Perception with a Single Camera
 Depth Perception with a Single Camera Jonathan R. Seal 1, Donald G. Bailey 2, Gourab Sen Gupta 2 1 Institute of Technology and Engineering, 2 Institute of Information Sciences and Technology, Massey University,
Depth Perception with a Single Camera Jonathan R. Seal 1, Donald G. Bailey 2, Gourab Sen Gupta 2 1 Institute of Technology and Engineering, 2 Institute of Information Sciences and Technology, Massey University,
An Autonomous Vehicle Navigation System using Panoramic Machine Vision Techniques
 An Autonomous Vehicle Navigation System using Panoramic Machine Vision Techniques Kevin Rushant, Department of Computer Science, University of Sheffield, GB. email: krusha@dcs.shef.ac.uk Libor Spacek,
An Autonomous Vehicle Navigation System using Panoramic Machine Vision Techniques Kevin Rushant, Department of Computer Science, University of Sheffield, GB. email: krusha@dcs.shef.ac.uk Libor Spacek,
For a long time I limited myself to one color as a form of discipline. Pablo Picasso. Color Image Processing
 For a long time I limited myself to one color as a form of discipline. Pablo Picasso Color Image Processing 1 Preview Motive - Color is a powerful descriptor that often simplifies object identification
For a long time I limited myself to one color as a form of discipline. Pablo Picasso Color Image Processing 1 Preview Motive - Color is a powerful descriptor that often simplifies object identification
The introduction and background in the previous chapters provided context in
 Chapter 3 3. Eye Tracking Instrumentation 3.1 Overview The introduction and background in the previous chapters provided context in which eye tracking systems have been used to study how people look at
Chapter 3 3. Eye Tracking Instrumentation 3.1 Overview The introduction and background in the previous chapters provided context in which eye tracking systems have been used to study how people look at
Topic 9 - Sensors Within
 Topic 9 - Sensors Within Learning Outcomes In this topic, we will take a closer look at sensor sizes in digital cameras. By the end of this video you will have a better understanding of what the various
Topic 9 - Sensors Within Learning Outcomes In this topic, we will take a closer look at sensor sizes in digital cameras. By the end of this video you will have a better understanding of what the various
Image Demosaicing. Chapter Introduction. Ruiwen Zhen and Robert L. Stevenson
 Chapter 2 Image Demosaicing Ruiwen Zhen and Robert L. Stevenson 2.1 Introduction Digital cameras are extremely popular and have replaced traditional film-based cameras in most applications. To produce
Chapter 2 Image Demosaicing Ruiwen Zhen and Robert L. Stevenson 2.1 Introduction Digital cameras are extremely popular and have replaced traditional film-based cameras in most applications. To produce
Linear Gaussian Method to Detect Blurry Digital Images using SIFT
 IJCAES ISSN: 2231-4946 Volume III, Special Issue, November 2013 International Journal of Computer Applications in Engineering Sciences Special Issue on Emerging Research Areas in Computing(ERAC) www.caesjournals.org
IJCAES ISSN: 2231-4946 Volume III, Special Issue, November 2013 International Journal of Computer Applications in Engineering Sciences Special Issue on Emerging Research Areas in Computing(ERAC) www.caesjournals.org
International Journal of Innovative Research in Engineering Science and Technology APRIL 2018 ISSN X
 HIGH DYNAMIC RANGE OF MULTISPECTRAL ACQUISITION USING SPATIAL IMAGES 1 M.Kavitha, M.Tech., 2 N.Kannan, M.E., and 3 S.Dharanya, M.E., 1 Assistant Professor/ CSE, Dhirajlal Gandhi College of Technology,
HIGH DYNAMIC RANGE OF MULTISPECTRAL ACQUISITION USING SPATIAL IMAGES 1 M.Kavitha, M.Tech., 2 N.Kannan, M.E., and 3 S.Dharanya, M.E., 1 Assistant Professor/ CSE, Dhirajlal Gandhi College of Technology,
Sensing and Perception
 Unit D tion Exploring Robotics Spring, 2013 D.1 Why does a robot need sensors? the environment is complex the environment is dynamic enable the robot to learn about current conditions in its environment.
Unit D tion Exploring Robotics Spring, 2013 D.1 Why does a robot need sensors? the environment is complex the environment is dynamic enable the robot to learn about current conditions in its environment.
Introduction to Computer Vision
 Introduction to Computer Vision CS / ECE 181B Thursday, April 1, 2004 Course Details HW #0 and HW #1 are available. Course web site http://www.ece.ucsb.edu/~manj/cs181b Syllabus, schedule, lecture notes,
Introduction to Computer Vision CS / ECE 181B Thursday, April 1, 2004 Course Details HW #0 and HW #1 are available. Course web site http://www.ece.ucsb.edu/~manj/cs181b Syllabus, schedule, lecture notes,
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt.
 CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Session 7 Pixels and Image Filtering Mani Golparvar-Fard Department of Civil and Environmental Engineering 329D, Newmark Civil Engineering
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Session 7 Pixels and Image Filtering Mani Golparvar-Fard Department of Civil and Environmental Engineering 329D, Newmark Civil Engineering
ROAD TO THE BEST ALPR IMAGES
 ROAD TO THE BEST ALPR IMAGES INTRODUCTION Since automatic license plate recognition (ALPR) or automatic number plate recognition (ANPR) relies on optical character recognition (OCR) of images, it makes
ROAD TO THE BEST ALPR IMAGES INTRODUCTION Since automatic license plate recognition (ALPR) or automatic number plate recognition (ANPR) relies on optical character recognition (OCR) of images, it makes
Reverse Engineering the Human Vision System
 Reverse Engineering the Human Vision System Reverse Engineering the Human Vision System Biologically Inspired Computer Vision Approaches Maria Petrou Imperial College London Overview of the Human Visual
Reverse Engineering the Human Vision System Reverse Engineering the Human Vision System Biologically Inspired Computer Vision Approaches Maria Petrou Imperial College London Overview of the Human Visual
Einführung in die Erweiterte Realität. 5. Head-Mounted Displays
 Einführung in die Erweiterte Realität 5. Head-Mounted Displays Prof. Gudrun Klinker, Ph.D. Institut für Informatik,Technische Universität München klinker@in.tum.de Nov 30, 2004 Agenda 1. Technological
Einführung in die Erweiterte Realität 5. Head-Mounted Displays Prof. Gudrun Klinker, Ph.D. Institut für Informatik,Technische Universität München klinker@in.tum.de Nov 30, 2004 Agenda 1. Technological
Image Formation: Camera Model
 Image Formation: Camera Model Ruigang Yang COMP 684 Fall 2005, CS684-IBMR Outline Camera Models Pinhole Perspective Projection Affine Projection Camera with Lenses Digital Image Formation The Human Eye
Image Formation: Camera Model Ruigang Yang COMP 684 Fall 2005, CS684-IBMR Outline Camera Models Pinhole Perspective Projection Affine Projection Camera with Lenses Digital Image Formation The Human Eye
Real- Time Computer Vision and Robotics Using Analog VLSI Circuits
 750 Koch, Bair, Harris, Horiuchi, Hsu and Luo Real- Time Computer Vision and Robotics Using Analog VLSI Circuits Christof Koch Wyeth Bair John. Harris Timothy Horiuchi Andrew Hsu Jin Luo Computation and
750 Koch, Bair, Harris, Horiuchi, Hsu and Luo Real- Time Computer Vision and Robotics Using Analog VLSI Circuits Christof Koch Wyeth Bair John. Harris Timothy Horiuchi Andrew Hsu Jin Luo Computation and
ROBOT VISION. Dr.M.Madhavi, MED, MVSREC
 ROBOT VISION Dr.M.Madhavi, MED, MVSREC Robotic vision may be defined as the process of acquiring and extracting information from images of 3-D world. Robotic vision is primarily targeted at manipulation
ROBOT VISION Dr.M.Madhavi, MED, MVSREC Robotic vision may be defined as the process of acquiring and extracting information from images of 3-D world. Robotic vision is primarily targeted at manipulation
Single Camera Catadioptric Stereo System
 Single Camera Catadioptric Stereo System Abstract In this paper, we present a framework for novel catadioptric stereo camera system that uses a single camera and a single lens with conic mirrors. Various
Single Camera Catadioptric Stereo System Abstract In this paper, we present a framework for novel catadioptric stereo camera system that uses a single camera and a single lens with conic mirrors. Various
Toward Non-stationary Blind Image Deblurring: Models and Techniques
 Toward Non-stationary Blind Image Deblurring: Models and Techniques Ji, Hui Department of Mathematics National University of Singapore NUS, 30-May-2017 Outline of the talk Non-stationary Image blurring
Toward Non-stationary Blind Image Deblurring: Models and Techniques Ji, Hui Department of Mathematics National University of Singapore NUS, 30-May-2017 Outline of the talk Non-stationary Image blurring
FLASH LiDAR KEY BENEFITS
 In 2013, 1.2 million people died in vehicle accidents. That is one death every 25 seconds. Some of these lives could have been saved with vehicles that have a better understanding of the world around them
In 2013, 1.2 million people died in vehicle accidents. That is one death every 25 seconds. Some of these lives could have been saved with vehicles that have a better understanding of the world around them
CPSC 425: Computer Vision
 1 / 55 CPSC 425: Computer Vision Instructor: Fred Tung ftung@cs.ubc.ca Department of Computer Science University of British Columbia Lecture Notes 2015/2016 Term 2 2 / 55 Menu January 7, 2016 Topics: Image
1 / 55 CPSC 425: Computer Vision Instructor: Fred Tung ftung@cs.ubc.ca Department of Computer Science University of British Columbia Lecture Notes 2015/2016 Term 2 2 / 55 Menu January 7, 2016 Topics: Image
IMAGE ENHANCEMENT IN SPATIAL DOMAIN
 A First Course in Machine Vision IMAGE ENHANCEMENT IN SPATIAL DOMAIN By: Ehsan Khoramshahi Definitions The principal objective of enhancement is to process an image so that the result is more suitable
A First Course in Machine Vision IMAGE ENHANCEMENT IN SPATIAL DOMAIN By: Ehsan Khoramshahi Definitions The principal objective of enhancement is to process an image so that the result is more suitable
6 Color Image Processing
 6 Color Image Processing Angela Chih-Wei Tang ( 唐之瑋 ) Department of Communication Engineering National Central University JhongLi, Taiwan 2009 Fall Outline Color fundamentals Color models Pseudocolor image
6 Color Image Processing Angela Chih-Wei Tang ( 唐之瑋 ) Department of Communication Engineering National Central University JhongLi, Taiwan 2009 Fall Outline Color fundamentals Color models Pseudocolor image
Vishnu Nath. Usage of computer vision and humanoid robotics to create autonomous robots. (Ximea Currera RL04C Camera Kit)
") Vishnu Nath Usage of computer vision and humanoid robotics to create autonomous robots (Ximea Currera RL04C Camera Kit) Acknowledgements Firstly, I would like to thank Ivan Klimkovic of Ximea Corporation,
Vishnu Nath Usage of computer vision and humanoid robotics to create autonomous robots (Ximea Currera RL04C Camera Kit) Acknowledgements Firstly, I would like to thank Ivan Klimkovic of Ximea Corporation,
Neural Networks The New Moore s Law
 Neural Networks The New Moore s Law Chris Rowen, PhD, FIEEE CEO Cognite Ventures December 216 Outline Moore s Law Revisited: Efficiency Drives Productivity Embedded Neural Network Product Segments Efficiency
Neural Networks The New Moore s Law Chris Rowen, PhD, FIEEE CEO Cognite Ventures December 216 Outline Moore s Law Revisited: Efficiency Drives Productivity Embedded Neural Network Product Segments Efficiency
Digital images. Digital Image Processing Fundamentals. Digital images. Varieties of digital images. Dr. Edmund Lam. ELEC4245: Digital Image Processing
 Digital images Digital Image Processing Fundamentals Dr Edmund Lam Department of Electrical and Electronic Engineering The University of Hong Kong (a) Natural image (b) Document image ELEC4245: Digital
Digital images Digital Image Processing Fundamentals Dr Edmund Lam Department of Electrical and Electronic Engineering The University of Hong Kong (a) Natural image (b) Document image ELEC4245: Digital
Anna University, Chennai B.E./B.TECH DEGREE EXAMINATION, MAY/JUNE 2013 Seventh Semester
 www.vidyarthiplus.com Anna University, Chennai B.E./B.TECH DEGREE EXAMINATION, MAY/JUNE 2013 Seventh Semester Electronics and Communication Engineering EC 2029 / EC 708 DIGITAL IMAGE PROCESSING (Regulation
www.vidyarthiplus.com Anna University, Chennai B.E./B.TECH DEGREE EXAMINATION, MAY/JUNE 2013 Seventh Semester Electronics and Communication Engineering EC 2029 / EC 708 DIGITAL IMAGE PROCESSING (Regulation
10mW CMOS Retina and Classifier for Handheld, 1000Images/s Optical Character Recognition System
 TP 12.1 10mW CMOS Retina and Classifier for Handheld, 1000Images/s Optical Character Recognition System Peter Masa, Pascal Heim, Edo Franzi, Xavier Arreguit, Friedrich Heitger, Pierre Francois Ruedi, Pascal
TP 12.1 10mW CMOS Retina and Classifier for Handheld, 1000Images/s Optical Character Recognition System Peter Masa, Pascal Heim, Edo Franzi, Xavier Arreguit, Friedrich Heitger, Pierre Francois Ruedi, Pascal
EE 392B: Course Introduction
 EE 392B Course Introduction About EE392B Goals Topics Schedule Prerequisites Course Overview Digital Imaging System Image Sensor Architectures Nonidealities and Performance Measures Color Imaging Recent
EE 392B Course Introduction About EE392B Goals Topics Schedule Prerequisites Course Overview Digital Imaging System Image Sensor Architectures Nonidealities and Performance Measures Color Imaging Recent
Focusing and Metering
 Focusing and Metering CS 478 Winter 2012 Slides mostly stolen by David Jacobs from Marc Levoy Focusing Outline Manual Focus Specialty Focus Autofocus Active AF Passive AF AF Modes Manual Focus - View Camera
Focusing and Metering CS 478 Winter 2012 Slides mostly stolen by David Jacobs from Marc Levoy Focusing Outline Manual Focus Specialty Focus Autofocus Active AF Passive AF AF Modes Manual Focus - View Camera
Lecture 2: Digital Image Fundamentals -- Sampling & Quantization
 I2200: Digital Image processing Lecture 2: Digital Image Fundamentals -- Sampling & Quantization Prof. YingLi Tian Sept. 6, 2017 Department of Electrical Engineering The City College of New York The City
I2200: Digital Image processing Lecture 2: Digital Image Fundamentals -- Sampling & Quantization Prof. YingLi Tian Sept. 6, 2017 Department of Electrical Engineering The City College of New York The City
the dimensionality of the world Travelling through Space and Time Learning Outcomes Johannes M. Zanker
 Travelling through Space and Time Johannes M. Zanker http://www.pc.rhul.ac.uk/staff/j.zanker/ps1061/l4/ps1061_4.htm 05/02/2015 PS1061 Sensation & Perception #4 JMZ 1 Learning Outcomes at the end of this
Travelling through Space and Time Johannes M. Zanker http://www.pc.rhul.ac.uk/staff/j.zanker/ps1061/l4/ps1061_4.htm 05/02/2015 PS1061 Sensation & Perception #4 JMZ 1 Learning Outcomes at the end of this
Digital Photographs, Image Sensors and Matrices
 Digital Photographs, Image Sensors and Matrices Digital Camera Image Sensors Electron Counts Checkerboard Analogy Bryce Bayer s Color Filter Array Mosaic. Image Sensor Data to Matrix Data Visualization
Digital Photographs, Image Sensors and Matrices Digital Camera Image Sensors Electron Counts Checkerboard Analogy Bryce Bayer s Color Filter Array Mosaic. Image Sensor Data to Matrix Data Visualization
CMVision and Color Segmentation. CSE398/498 Robocup 19 Jan 05
 CMVision and Color Segmentation CSE398/498 Robocup 19 Jan 05 Announcements Please send me your time availability for working in the lab during the M-F, 8AM-8PM time period Why Color Segmentation? Computationally
CMVision and Color Segmentation CSE398/498 Robocup 19 Jan 05 Announcements Please send me your time availability for working in the lab during the M-F, 8AM-8PM time period Why Color Segmentation? Computationally
International Journal of Advance Engineering and Research Development CONTRAST ENHANCEMENT OF IMAGES USING IMAGE FUSION BASED ON LAPLACIAN PYRAMID
 Scientific Journal of Impact Factor(SJIF): 3.134 e-issn(o): 2348-4470 p-issn(p): 2348-6406 International Journal of Advance Engineering and Research Development Volume 2,Issue 7, July -2015 CONTRAST ENHANCEMENT
Scientific Journal of Impact Factor(SJIF): 3.134 e-issn(o): 2348-4470 p-issn(p): 2348-6406 International Journal of Advance Engineering and Research Development Volume 2,Issue 7, July -2015 CONTRAST ENHANCEMENT
Acquisition Basics. How can we measure material properties? Goal of this Section. Special Purpose Tools. General Purpose Tools
 Course 10 Realistic Materials in Computer Graphics Acquisition Basics MPI Informatik (moving to the University of Washington Goal of this Section practical, hands-on description of acquisition basics general
Course 10 Realistic Materials in Computer Graphics Acquisition Basics MPI Informatik (moving to the University of Washington Goal of this Section practical, hands-on description of acquisition basics general
LAB MANUAL SUBJECT: IMAGE PROCESSING BE (COMPUTER) SEM VII
 SEM VII") LAB MANUAL SUBJECT: IMAGE PROCESSING BE (COMPUTER) SEM VII IMAGE PROCESSING INDEX CLASS: B.E(COMPUTER) SR. NO SEMESTER:VII TITLE OF THE EXPERIMENT. 1 Point processing in spatial domain a. Negation of an
LAB MANUAL SUBJECT: IMAGE PROCESSING BE (COMPUTER) SEM VII IMAGE PROCESSING INDEX CLASS: B.E(COMPUTER) SR. NO SEMESTER:VII TITLE OF THE EXPERIMENT. 1 Point processing in spatial domain a. Negation of an