Image Formation: Camera Model
|
|
|
- Aubrey McDaniel
- 6 years ago
- Views:
Transcription
1 Image Formation: Camera Model Ruigang Yang COMP 684 Fall 2005, CS684-IBMR
2 Outline Camera Models Pinhole Perspective Projection Affine Projection Camera with Lenses Digital Image Formation The Human Eye Adapted from slides prepared by Marc Pollefeys (UNC-CH) Fall 2005, CS684-IBMR 2

3 What is an Image? A Two-dimensional pattern of brightness values, formed by the projection of 3D objects. Figure from US Navy Manual of Basic Optics and Optical Instruments, prepared by Bureau of Naval Personnel. Reprinted by Dover Publications, Inc., 969. Fall 2005, CS684-IBMR 3
4 Animal eye: a looonnng time ago. Photographic camera: Niepce, 86. Pinhole perspective projection: Mo-Ti, 5 th Century BC Camera obscura: 7 th Century. Fall 2005, CS684-IBMR 4
5 Distant objects appear smaller Fall 2005, CS684-IBMR 5

6 Parallel lines meet vanishing point Fall 2005, CS684-IBMR 6

7 Vanishing points H VPL VPR VP VP 2 Different directions correspond different vanishing points VP 3 Fall 2005, CS684-IBMR 7
8 Geometric properties of projection Points go to points Lines go to lines Planes go to whole image or half-plane Polygons go to polygons Degenerate cases: line through focal point yields point plane through focal point yields line Fall 2005, CS684-IBMR 8
9 Pinhole Perspective Equation x y ' ' = = f f ' ' x z y z Fall 2005, CS684-IBMR 9
10 Affine Projection Model I: Weak perspective projection x' mx f ' where m = y' = = my is the magnification. z 0 When the scene relief is small compared its distance from the Camera, m = constant weak perspective projection. Fall 2005, CS684-IBMR 0
11 Affine Projection Model II: Orthographic projection x' = y' = x y When the camera is at a (roughly constant) distance from the scene, take m=. Fall 2005, CS684-IBMR
12 Planar pinhole perspective Orthographic projection Spherical pinhole perspective Fall 2005, CS684-IBMR 2

13 Limits for pinhole cameras Pinhole Size Fall 2005, CS684-IBMR 3
14 Outline Camera Models Pinhole Perspective Projection Affine Projection Camera with Lenses Digital Image Formation The Human Eye Adapted from slides prepared by Marc Pollefeys (UNC-CH) Fall 2005, CS684-IBMR 4

15 Why Lenses? Snell s law n = sinα n2 sin α Descartes law 2 Fall 2005, CS684-IBMR 5
16 Fall 2005, CS684-IBMR 6 Paraxial (or first-order) optics R γ β α h d h + = + = R β γ α d h h = = = R R d h h n h d h n Snell s law Small angles: 2 2 α α n n = R n n d n d n = sin sin α α n n =
17 Fall 2005, CS684-IBMR 7 Thin Lenses spherical lens surfaces; incoming light ± parallel to axis; thickness << radii; same refractive index on both sides R n Z n Z * = + R n Z Z n = + ' * Z R n Z n * = ' * Z R n Z n = R n n d n d n = + ) 2( and ' = = n R f f z z ' Z Z R n R n =
18 Thin Lenses x' = y' = z' z' x z y z where z' z = f and R 2( n ) Fall 2005, CS684-IBMR 8 f =
19 Thick Lens Fall 2005, CS684-IBMR 9


20 The depth-of-field Fall 2005, CS684-IBMR 20
21 Fall 2005, CS684-IBMR 2 Depth of Field f b d f Z f Z Z Z Z Z + = = / ) ( decreases with d, increases with Z 0 strike a balance between incoming light and sharp depth range
22 Deviations from the lens model Ideal lens model makes three assumptions :. all rays from a point are focused onto image point 2. all image points in a single plane 3. magnification is constant deviations from this ideal are aberrations Fall 2005, CS684-IBMR 22
23 Aberration Two Types Geometrical: Imperfections in lens Chromatic: refractive index function of wavelength From Fall 2005, CS684-IBMR 23

24 Geometrical aberrations Spherical aberration Astigmatism Distortion Coma aberrations are reduced by combining lenses Fall 2005, CS684-IBMR 24

25 Spherical aberration rays parallel to the axis do not converge outer portions of the lens yield smaller focal lengths Fall 2005, CS684-IBMR 25

26 Astigmatism Different focal length for inclined rays Fall 2005, CS684-IBMR 26
27 Distortion magnification/focal length different for different angles of inclination Pincushion Distortion Pinch and stretch the image of a square at the corners Barrel Distortion Push the corners of an image of a square in towards the center Fall 2005, CS684-IBMR 27


28 Distortion Can be corrected if parameters are know Fall 2005, CS684-IBMR 28
29 Coma point off the axis depicted as comet shaped blob Fall 2005, CS684-IBMR 29


30 Chromatic aberration Rays of different wavelengths focused in different planes Fall 2005, CS684-IBMR 30
 Photographic Film (Eastman,889) Cinema (Lumière Brothers,895) Color Photography (Lumière Brothers, 908) Television (Baird, Farnsworth,")
31 Photographs (Niepce, La Table Servie, 822) Milestones: Collection Harlingue-Viollet. Daguerreotypes (839) Photographic Film (Eastman,889) Cinema (Lumière Brothers,895) Color Photography (Lumière Brothers, 908) Television (Baird, Farnsworth, Zworykin, 920s) CCD Devices (970) more recently CMOS Fall 2005, CS684-IBMR 3
32 Outline Camera Models Pinhole Perspective Projection Affine Projection Camera with Lenses Digital Image Formation The Human Eye Fall 2005, CS684-IBMR 32

33 Image Sensors Fall 2005, CS684-IBMR 33
34 An Example of Digital Image Acquisition Process Fall 2005, CS684-IBMR 34
35 Digital Image Generation Fall 2005, CS684-IBMR 35

36 Image Sampling and Quantization Fall 2005, CS684-IBMR 36
37 Cameras Sensors Two Types CCD (Charge-Coupled Devices) CMOS (Complementary Metal-Oxide Semiconductor) Fall 2005, CS684-IBMR 37

38 CCD Separate photo sensor at regular positions Most-widely used Progressive vs. Interlaced Progressive: read out every line in order. Interlaced: first read out the odd lines, then read out the even lines. They are reintegrated through image processing. Fall 2005, CS684-IBMR 38
 Lower sensitivity (lower fill rate)")

39 CMOS Same sensor elements as CCD Each photo sensor has its own amplifier More noise (reduced by subtracting black image) Lower sensitivity (lower fill rate) Uses standard CMOS technology Allows to put other components on chip Smart pixels Foveon 4k x 4k sensor 0.8µ process 70M transistors Fall 2005, CS684-IBMR 39

40 CCD vs. CMOS Mature technology Specific technology High production cost High power consumption Higher fill rate Blooming Sequential readout Recent technology Standard IC technology Cheap Low power Less sensitive Per pixel amplification Random pixel access Smart pixels On chip integration with other components Fall 2005, CS684-IBMR 40
41 Color cameras We consider 3 concepts:. Prism (with 3 sensors) 2. Filter mosaic 3. Filter wheel and X3 Fall 2005, CS684-IBMR 4


42 Prism colour camera Separate light in 3 beams using dichroic prism Requires 3 sensors & precise alignment Good color separation Fall 2005, CS684-IBMR 42


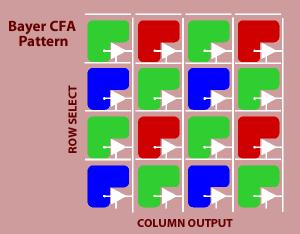
43 Filter mosaic Coat filter directly on sensor Fall 2005, CS684-IBMR 43



44 Filter mosaic De-mosaicing (obtain full color & full resolution image) Problem Fall 2005, CS684-IBMR 44

45 Filter wheel Rotate multiple filters in front of lens Allows more than 3 colour bands Only suitable for static scenes Fall 2005, CS684-IBMR 45
46 Prism vs. mosaic vs. wheel approach Prism Mosaic Wheel # sensors 3 Separation High Average Good Cost High Low Average Frame rate High High Low Artifacts Low Aliasing Motion Bands or more High-end cameras Low-end cameras Scientific applications Fall 2005, CS684-IBMR 46





47 New color CMOS sensor Foveon sx3 better image quality smarter pixels Fall 2005, CS684-IBMR 47
48 Outline Camera Models Pinhole Perspective Projection Affine Projection Camera with Lenses Digital Image Formation The Human Eye Fall 2005, CS684-IBMR 48

49 The Human Eye Helmoltz s Schematic Eye Fall 2005, CS684-IBMR 49
. 995 Sinauer Associates, Inc.")
50 The distribution of rods and cones across the retina Reprinted from Foundations of Vision, by B. Wandell, Sinauer Associates, Inc., (995). 995 Sinauer Associates, Inc. Cones in the fovea Rods and cones in the periphery Reprinted from Foundations of Vision, by B. Wandell, Sinauer Associates, Inc., (995). 995 Sinauer Associates, Inc. Fall 2005, CS684-IBMR 50
51 Interesting Facts about Human Visual System Simultaneous Contrast Fall 2005, CS684-IBMR 5

52 Mach Band Effect Perceived Brightness changes around strong edges. Fall 2005, CS684-IBMR 52
53 Visual Masking Threshold intensity increases at background with large non-uniform spatial, temporal changes. Fall 2005, CS684-IBMR 53
54 Optical Illusions Fall 2005, CS684-IBMR 54
55 Next Class Multi-view Geometry and Stereo Fall 2005, CS684-IBMR 55
Cameras, lenses and sensors
 Cameras, lenses and sensors Marc Pollefeys COMP 256 Cameras, lenses and sensors Camera Models Pinhole Perspective Projection Affine Projection Camera with Lenses Sensing The Human Eye Reading: Chapter.
Cameras, lenses and sensors Marc Pollefeys COMP 256 Cameras, lenses and sensors Camera Models Pinhole Perspective Projection Affine Projection Camera with Lenses Sensing The Human Eye Reading: Chapter.
CS 443: Imaging and Multimedia Cameras and Lenses
 CS 443: Imaging and Multimedia Cameras and Lenses Spring 2008 Ahmed Elgammal Dept of Computer Science Rutgers University Outlines Cameras and lenses! 1 They are formed by the projection of 3D objects.
CS 443: Imaging and Multimedia Cameras and Lenses Spring 2008 Ahmed Elgammal Dept of Computer Science Rutgers University Outlines Cameras and lenses! 1 They are formed by the projection of 3D objects.
Image Formation III Chapter 1 (Forsyth&Ponce) Cameras Lenses & Sensors
 Cameras Lenses & Sensors") Image Formation III Chapter 1 (Forsyth&Ponce) Cameras Lenses & Sensors Guido Gerig CS-GY 6643, Spring 2017 (slides modified from Marc Pollefeys, UNC Chapel Hill/ ETH Zurich, With content from Prof. Trevor
Image Formation III Chapter 1 (Forsyth&Ponce) Cameras Lenses & Sensors Guido Gerig CS-GY 6643, Spring 2017 (slides modified from Marc Pollefeys, UNC Chapel Hill/ ETH Zurich, With content from Prof. Trevor
Building a Real Camera
 Building a Real Camera Home-made pinhole camera Slide by A. Efros http://www.debevec.org/pinhole/ Shrinking the aperture Why not make the aperture as small as possible? Less light gets through Diffraction
Building a Real Camera Home-made pinhole camera Slide by A. Efros http://www.debevec.org/pinhole/ Shrinking the aperture Why not make the aperture as small as possible? Less light gets through Diffraction
Building a Real Camera. Slides Credit: Svetlana Lazebnik
 Building a Real Camera Slides Credit: Svetlana Lazebnik Home-made pinhole camera Slide by A. Efros http://www.debevec.org/pinhole/ Shrinking the aperture Why not make the aperture as small as possible?
Building a Real Camera Slides Credit: Svetlana Lazebnik Home-made pinhole camera Slide by A. Efros http://www.debevec.org/pinhole/ Shrinking the aperture Why not make the aperture as small as possible?
Announcements. Image Formation: Outline. The course. How Cameras Produce Images. Earliest Surviving Photograph. Image Formation and Cameras
 Announcements Image ormation and Cameras CSE 252A Lecture 3 Assignment 0: Getting Started with Matlab is posted to web page, due Tuesday, ctober 4. Reading: Szeliski, Chapter 2 ptional Chapters 1 & 2 of
Announcements Image ormation and Cameras CSE 252A Lecture 3 Assignment 0: Getting Started with Matlab is posted to web page, due Tuesday, ctober 4. Reading: Szeliski, Chapter 2 ptional Chapters 1 & 2 of
Cameras. CSE 455, Winter 2010 January 25, 2010
 Cameras CSE 455, Winter 2010 January 25, 2010 Announcements New Lecturer! Neel Joshi, Ph.D. Post-Doctoral Researcher Microsoft Research neel@cs Project 1b (seam carving) was due on Friday the 22 nd Project
Cameras CSE 455, Winter 2010 January 25, 2010 Announcements New Lecturer! Neel Joshi, Ph.D. Post-Doctoral Researcher Microsoft Research neel@cs Project 1b (seam carving) was due on Friday the 22 nd Project
Cameras, lenses, and sensors
 Cameras, lenses, and sensors Reading: Chapter 1, Forsyth & Ponce Optional: Section 2.1, 2.3, Horn. 6.801/6.866 Profs. Bill Freeman and Trevor Darrell Sept. 10, 2002 Today s lecture How many people would
Cameras, lenses, and sensors Reading: Chapter 1, Forsyth & Ponce Optional: Section 2.1, 2.3, Horn. 6.801/6.866 Profs. Bill Freeman and Trevor Darrell Sept. 10, 2002 Today s lecture How many people would
CPSC 425: Computer Vision
 1 / 55 CPSC 425: Computer Vision Instructor: Fred Tung ftung@cs.ubc.ca Department of Computer Science University of British Columbia Lecture Notes 2015/2016 Term 2 2 / 55 Menu January 7, 2016 Topics: Image
1 / 55 CPSC 425: Computer Vision Instructor: Fred Tung ftung@cs.ubc.ca Department of Computer Science University of British Columbia Lecture Notes 2015/2016 Term 2 2 / 55 Menu January 7, 2016 Topics: Image
VC 14/15 TP2 Image Formation
 VC 14/15 TP2 Image Formation Mestrado em Ciência de Computadores Mestrado Integrado em Engenharia de Redes e Sistemas Informáticos Miguel Tavares Coimbra Outline Computer Vision? The Human Visual System
VC 14/15 TP2 Image Formation Mestrado em Ciência de Computadores Mestrado Integrado em Engenharia de Redes e Sistemas Informáticos Miguel Tavares Coimbra Outline Computer Vision? The Human Visual System
Acquisition. Some slides from: Yung-Yu Chuang (DigiVfx) Jan Neumann, Pat Hanrahan, Alexei Efros
 Jan Neumann, Pat Hanrahan, Alexei Efros") Acquisition Some slides from: Yung-Yu Chuang (DigiVfx) Jan Neumann, Pat Hanrahan, Alexei Efros Image Acquisition Digital Camera Film Outline Pinhole camera Lens Lens aberrations Exposure Sensors Noise
Acquisition Some slides from: Yung-Yu Chuang (DigiVfx) Jan Neumann, Pat Hanrahan, Alexei Efros Image Acquisition Digital Camera Film Outline Pinhole camera Lens Lens aberrations Exposure Sensors Noise
Lecture 7: Camera Models
 Lecture 7: Camera Models Professor Stanford Vision Lab 1 What we will learn toda? Pinhole cameras Cameras & lenses The geometr of pinhole cameras Reading: [FP]Chapters 1 3 [HZ] Chapter 6 2 What we will
Lecture 7: Camera Models Professor Stanford Vision Lab 1 What we will learn toda? Pinhole cameras Cameras & lenses The geometr of pinhole cameras Reading: [FP]Chapters 1 3 [HZ] Chapter 6 2 What we will
VC 11/12 T2 Image Formation
 VC 11/12 T2 Image Formation Mestrado em Ciência de Computadores Mestrado Integrado em Engenharia de Redes e Sistemas Informáticos Miguel Tavares Coimbra Outline Computer Vision? The Human Visual System
VC 11/12 T2 Image Formation Mestrado em Ciência de Computadores Mestrado Integrado em Engenharia de Redes e Sistemas Informáticos Miguel Tavares Coimbra Outline Computer Vision? The Human Visual System
CS6670: Computer Vision
 CS6670: Computer Vision Noah Snavely Lecture 4a: Cameras Source: S. Lazebnik Reading Szeliski chapter 2.2.3, 2.3 Image formation Let s design a camera Idea 1: put a piece of film in front of an object
CS6670: Computer Vision Noah Snavely Lecture 4a: Cameras Source: S. Lazebnik Reading Szeliski chapter 2.2.3, 2.3 Image formation Let s design a camera Idea 1: put a piece of film in front of an object
Image Formation and Capture
 Figure credits: B. Curless, E. Hecht, W.J. Smith, B.K.P. Horn, A. Theuwissen, and J. Malik Image Formation and Capture COS 429: Computer Vision Image Formation and Capture Real world Optics Sensor Devices
Figure credits: B. Curless, E. Hecht, W.J. Smith, B.K.P. Horn, A. Theuwissen, and J. Malik Image Formation and Capture COS 429: Computer Vision Image Formation and Capture Real world Optics Sensor Devices
VC 16/17 TP2 Image Formation
 VC 16/17 TP2 Image Formation Mestrado em Ciência de Computadores Mestrado Integrado em Engenharia de Redes e Sistemas Informáticos Hélder Filipe Pinto de Oliveira Outline Computer Vision? The Human Visual
VC 16/17 TP2 Image Formation Mestrado em Ciência de Computadores Mestrado Integrado em Engenharia de Redes e Sistemas Informáticos Hélder Filipe Pinto de Oliveira Outline Computer Vision? The Human Visual
CS6670: Computer Vision
 CS6670: Computer Vision Noah Snavely Lecture 5: Cameras and Projection Szeliski 2.1.3-2.1.6 Reading Announcements Project 1 assigned, see projects page: http://www.cs.cornell.edu/courses/cs6670/2011sp/projects/projects.html
CS6670: Computer Vision Noah Snavely Lecture 5: Cameras and Projection Szeliski 2.1.3-2.1.6 Reading Announcements Project 1 assigned, see projects page: http://www.cs.cornell.edu/courses/cs6670/2011sp/projects/projects.html
Projection. Announcements. Müller-Lyer Illusion. Image formation. Readings Nalwa 2.1
 Announcements Mailing list (you should have received messages) Project 1 additional test sequences online Projection Readings Nalwa 2.1 Müller-Lyer Illusion Image formation object film by Pravin Bhat http://www.michaelbach.de/ot/sze_muelue/index.html
Announcements Mailing list (you should have received messages) Project 1 additional test sequences online Projection Readings Nalwa 2.1 Müller-Lyer Illusion Image formation object film by Pravin Bhat http://www.michaelbach.de/ot/sze_muelue/index.html
Image Formation and Capture. Acknowledgment: some figures by B. Curless, E. Hecht, W.J. Smith, B.K.P. Horn, and A. Theuwissen
 Image Formation and Capture Acknowledgment: some figures by B. Curless, E. Hecht, W.J. Smith, B.K.P. Horn, and A. Theuwissen Image Formation and Capture Real world Optics Sensor Devices Sources of Error
Image Formation and Capture Acknowledgment: some figures by B. Curless, E. Hecht, W.J. Smith, B.K.P. Horn, and A. Theuwissen Image Formation and Capture Real world Optics Sensor Devices Sources of Error
LENSES. INEL 6088 Computer Vision
 LENSES INEL 6088 Computer Vision Digital camera A digital camera replaces film with a sensor array Each cell in the array is a Charge Coupled Device light-sensitive diode that converts photons to electrons
LENSES INEL 6088 Computer Vision Digital camera A digital camera replaces film with a sensor array Each cell in the array is a Charge Coupled Device light-sensitive diode that converts photons to electrons
CSE 473/573 Computer Vision and Image Processing (CVIP)
") CSE 473/573 Computer Vision and Image Processing (CVIP) Ifeoma Nwogu inwogu@buffalo.edu Lecture 4 Image formation(part I) Schedule Last class linear algebra overview Today Image formation and camera properties
CSE 473/573 Computer Vision and Image Processing (CVIP) Ifeoma Nwogu inwogu@buffalo.edu Lecture 4 Image formation(part I) Schedule Last class linear algebra overview Today Image formation and camera properties
Astronomy 80 B: Light. Lecture 9: curved mirrors, lenses, aberrations 29 April 2003 Jerry Nelson
 Astronomy 80 B: Light Lecture 9: curved mirrors, lenses, aberrations 29 April 2003 Jerry Nelson Sensitive Countries LLNL field trip 2003 April 29 80B-Light 2 Topics for Today Optical illusion Reflections
Astronomy 80 B: Light Lecture 9: curved mirrors, lenses, aberrations 29 April 2003 Jerry Nelson Sensitive Countries LLNL field trip 2003 April 29 80B-Light 2 Topics for Today Optical illusion Reflections
Lecture 2 Camera Models
 Lecture 2 Camera Models Professor Silvio Savarese Computational Vision and Geometr Lab Silvio Savarese Lecture 2 - -Jan-8 Lecture 2 Camera Models Pinhole cameras Cameras lenses The geometr of pinhole cameras
Lecture 2 Camera Models Professor Silvio Savarese Computational Vision and Geometr Lab Silvio Savarese Lecture 2 - -Jan-8 Lecture 2 Camera Models Pinhole cameras Cameras lenses The geometr of pinhole cameras
Lenses, exposure, and (de)focus
focus") Lenses, exposure, and (de)focus http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 15 Course announcements Homework 4 is out. - Due October 26
Lenses, exposure, and (de)focus http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 15 Course announcements Homework 4 is out. - Due October 26
OPTICAL SYSTEMS OBJECTIVES
 101 L7 OPTICAL SYSTEMS OBJECTIVES Aims Your aim here should be to acquire a working knowledge of the basic components of optical systems and understand their purpose, function and limitations in terms
101 L7 OPTICAL SYSTEMS OBJECTIVES Aims Your aim here should be to acquire a working knowledge of the basic components of optical systems and understand their purpose, function and limitations in terms
Unit 1: Image Formation
 Unit 1: Image Formation 1. Geometry 2. Optics 3. Photometry 4. Sensor Readings Szeliski 2.1-2.3 & 6.3.5 1 Physical parameters of image formation Geometric Type of projection Camera pose Optical Sensor
Unit 1: Image Formation 1. Geometry 2. Optics 3. Photometry 4. Sensor Readings Szeliski 2.1-2.3 & 6.3.5 1 Physical parameters of image formation Geometric Type of projection Camera pose Optical Sensor
Overview. Pinhole camera model Projective geometry Vanishing points and lines Projection matrix Cameras with Lenses Color Digital image
 Camera & Color Overview Pinhole camera model Projective geometry Vanishing points and lines Projection matrix Cameras with Lenses Color Digital image Book: Hartley 6.1, Szeliski 2.1.5, 2.2, 2.3 The trip
Camera & Color Overview Pinhole camera model Projective geometry Vanishing points and lines Projection matrix Cameras with Lenses Color Digital image Book: Hartley 6.1, Szeliski 2.1.5, 2.2, 2.3 The trip
Projection. Readings. Szeliski 2.1. Wednesday, October 23, 13
 Projection Readings Szeliski 2.1 Projection Readings Szeliski 2.1 Müller-Lyer Illusion by Pravin Bhat Müller-Lyer Illusion by Pravin Bhat http://www.michaelbach.de/ot/sze_muelue/index.html Müller-Lyer
Projection Readings Szeliski 2.1 Projection Readings Szeliski 2.1 Müller-Lyer Illusion by Pravin Bhat Müller-Lyer Illusion by Pravin Bhat http://www.michaelbach.de/ot/sze_muelue/index.html Müller-Lyer
Image Formation. Light from distant things. Geometrical optics. Pinhole camera. Chapter 36
 Light from distant things Chapter 36 We learn about a distant thing from the light it generates or redirects. The lenses in our eyes create images of objects our brains can process. This chapter concerns
Light from distant things Chapter 36 We learn about a distant thing from the light it generates or redirects. The lenses in our eyes create images of objects our brains can process. This chapter concerns
Projection. Projection. Image formation. Müller-Lyer Illusion. Readings. Readings. Let s design a camera. Szeliski 2.1. Szeliski 2.
 Projection Projection Readings Szeliski 2.1 Readings Szeliski 2.1 Müller-Lyer Illusion Image formation object film by Pravin Bhat http://www.michaelbach.de/ot/sze_muelue/index.html Let s design a camera
Projection Projection Readings Szeliski 2.1 Readings Szeliski 2.1 Müller-Lyer Illusion Image formation object film by Pravin Bhat http://www.michaelbach.de/ot/sze_muelue/index.html Let s design a camera
Lecture 2 Camera Models
 Lecture 2 Camera Models Professor Silvio Savarese Computational Vision and Geometr Lab Silvio Savarese Lecture 2-4-Jan-4 Announcements Prerequisites: an questions? This course requires knowledge of linear
Lecture 2 Camera Models Professor Silvio Savarese Computational Vision and Geometr Lab Silvio Savarese Lecture 2-4-Jan-4 Announcements Prerequisites: an questions? This course requires knowledge of linear
IMAGE FORMATION. Light source properties. Sensor characteristics Surface. Surface reflectance properties. Optics
 IMAGE FORMATION Light source properties Sensor characteristics Surface Exposure shape Optics Surface reflectance properties ANALOG IMAGES An image can be understood as a 2D light intensity function f(x,y)
IMAGE FORMATION Light source properties Sensor characteristics Surface Exposure shape Optics Surface reflectance properties ANALOG IMAGES An image can be understood as a 2D light intensity function f(x,y)
Applied Optics. , Physics Department (Room #36-401) , ,
 , ,") Applied Optics Professor, Physics Department (Room #36-401) 2290-0923, 019-539-0923, shsong@hanyang.ac.kr Office Hours Mondays 15:00-16:30, Wednesdays 15:00-16:30 TA (Ph.D. student, Room #36-415) 2290-0921,
Applied Optics Professor, Physics Department (Room #36-401) 2290-0923, 019-539-0923, shsong@hanyang.ac.kr Office Hours Mondays 15:00-16:30, Wednesdays 15:00-16:30 TA (Ph.D. student, Room #36-415) 2290-0921,
The Camera : Computational Photography Alexei Efros, CMU, Fall 2008
 The Camera 15-463: Computational Photography Alexei Efros, CMU, Fall 2008 How do we see the world? object film Let s design a camera Idea 1: put a piece of film in front of an object Do we get a reasonable
The Camera 15-463: Computational Photography Alexei Efros, CMU, Fall 2008 How do we see the world? object film Let s design a camera Idea 1: put a piece of film in front of an object Do we get a reasonable
Lecture 02 Image Formation 1
 Institute of Informatics Institute of Neuroinformatics Lecture 02 Image Formation 1 Davide Scaramuzza http://rpg.ifi.uzh.ch 1 Lab Exercise 1 - Today afternoon Room ETH HG E 1.1 from 13:15 to 15:00 Work
Institute of Informatics Institute of Neuroinformatics Lecture 02 Image Formation 1 Davide Scaramuzza http://rpg.ifi.uzh.ch 1 Lab Exercise 1 - Today afternoon Room ETH HG E 1.1 from 13:15 to 15:00 Work
Cameras. Steve Rotenberg CSE168: Rendering Algorithms UCSD, Spring 2017
 Cameras Steve Rotenberg CSE168: Rendering Algorithms UCSD, Spring 2017 Camera Focus Camera Focus So far, we have been simulating pinhole cameras with perfect focus Often times, we want to simulate more
Cameras Steve Rotenberg CSE168: Rendering Algorithms UCSD, Spring 2017 Camera Focus Camera Focus So far, we have been simulating pinhole cameras with perfect focus Often times, we want to simulate more
CSE 527: Introduction to Computer Vision
 CSE 527: Introduction to Computer Vision Week 2 - Class 2: Vision, Physics, Cameras September 7th, 2017 Today Physics Human Vision Eye Brain Perspective Projection Camera Models Image Formation Digital
CSE 527: Introduction to Computer Vision Week 2 - Class 2: Vision, Physics, Cameras September 7th, 2017 Today Physics Human Vision Eye Brain Perspective Projection Camera Models Image Formation Digital
Colorado School of Mines. Computer Vision. Professor William Hoff Dept of Electrical Engineering &Computer Science.
 Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Sensors and Image Formation Imaging sensors and models of image formation Coordinate systems Digital
Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Sensors and Image Formation Imaging sensors and models of image formation Coordinate systems Digital
Lenses. Overview. Terminology. The pinhole camera. Pinhole camera Lenses Principles of operation Limitations
 Overview Pinhole camera Principles of operation Limitations 1 Terminology The pinhole camera The first camera - camera obscura - known to Aristotle. In 3D, we can visualize the blur induced by the pinhole
Overview Pinhole camera Principles of operation Limitations 1 Terminology The pinhole camera The first camera - camera obscura - known to Aristotle. In 3D, we can visualize the blur induced by the pinhole
brief history of photography foveon X3 imager technology description
 brief history of photography foveon X3 imager technology description imaging technology 30,000 BC chauvet-pont-d arc pinhole camera principle first described by Aristotle fourth century B.C. oldest known
brief history of photography foveon X3 imager technology description imaging technology 30,000 BC chauvet-pont-d arc pinhole camera principle first described by Aristotle fourth century B.C. oldest known
Lecture 2: Geometrical Optics. Geometrical Approximation. Lenses. Mirrors. Optical Systems. Images and Pupils. Aberrations.
 Lecture 2: Geometrical Optics Outline 1 Geometrical Approximation 2 Lenses 3 Mirrors 4 Optical Systems 5 Images and Pupils 6 Aberrations Christoph U. Keller, Leiden Observatory, keller@strw.leidenuniv.nl
Lecture 2: Geometrical Optics Outline 1 Geometrical Approximation 2 Lenses 3 Mirrors 4 Optical Systems 5 Images and Pupils 6 Aberrations Christoph U. Keller, Leiden Observatory, keller@strw.leidenuniv.nl
Dr F. Cuzzolin 1. September 29, 2015
 P00407 Principles of Computer Vision 1 1 Department of Computing and Communication Technologies Oxford Brookes University, UK September 29, 2015 September 29, 2015 1 / 73 Outline of the Lecture 1 2 Basics
P00407 Principles of Computer Vision 1 1 Department of Computing and Communication Technologies Oxford Brookes University, UK September 29, 2015 September 29, 2015 1 / 73 Outline of the Lecture 1 2 Basics
Image Formation. Dr. Gerhard Roth. COMP 4102A Winter 2015 Version 3
 Image Formation Dr. Gerhard Roth COMP 4102A Winter 2015 Version 3 1 Image Formation Two type of images Intensity image encodes light intensities (passive sensor) Range (depth) image encodes shape and distance
Image Formation Dr. Gerhard Roth COMP 4102A Winter 2015 Version 3 1 Image Formation Two type of images Intensity image encodes light intensities (passive sensor) Range (depth) image encodes shape and distance
Two strategies for realistic rendering capture real world data synthesize from bottom up
 Recap from Wednesday Two strategies for realistic rendering capture real world data synthesize from bottom up Both have existed for 500 years. Both are successful. Attempts to take the best of both world
Recap from Wednesday Two strategies for realistic rendering capture real world data synthesize from bottom up Both have existed for 500 years. Both are successful. Attempts to take the best of both world
Chapters 1 & 2. Definitions and applications Conceptual basis of photogrammetric processing
 Chapters 1 & 2 Chapter 1: Photogrammetry Definitions and applications Conceptual basis of photogrammetric processing Transition from two-dimensional imagery to three-dimensional information Automation
Chapters 1 & 2 Chapter 1: Photogrammetry Definitions and applications Conceptual basis of photogrammetric processing Transition from two-dimensional imagery to three-dimensional information Automation
Lecture 7: Camera Models
 Lecture 7: Camera Models Professor Fei- Fei Li Stanford Vision Lab Lecture 7 -! 1 What we will learn toda? Pinhole cameras Cameras & lenses The geometr of pinhole cameras Reading: [FP] Chapters 1 3 [HZ]
Lecture 7: Camera Models Professor Fei- Fei Li Stanford Vision Lab Lecture 7 -! 1 What we will learn toda? Pinhole cameras Cameras & lenses The geometr of pinhole cameras Reading: [FP] Chapters 1 3 [HZ]
Lecture 4: Geometrical Optics 2. Optical Systems. Images and Pupils. Rays. Wavefronts. Aberrations. Outline
 Lecture 4: Geometrical Optics 2 Outline 1 Optical Systems 2 Images and Pupils 3 Rays 4 Wavefronts 5 Aberrations Christoph U. Keller, Leiden University, keller@strw.leidenuniv.nl Lecture 4: Geometrical
Lecture 4: Geometrical Optics 2 Outline 1 Optical Systems 2 Images and Pupils 3 Rays 4 Wavefronts 5 Aberrations Christoph U. Keller, Leiden University, keller@strw.leidenuniv.nl Lecture 4: Geometrical
Waves & Oscillations
 Physics 42200 Waves & Oscillations Lecture 33 Geometric Optics Spring 2013 Semester Matthew Jones Aberrations We have continued to make approximations: Paraxial rays Spherical lenses Index of refraction
Physics 42200 Waves & Oscillations Lecture 33 Geometric Optics Spring 2013 Semester Matthew Jones Aberrations We have continued to make approximations: Paraxial rays Spherical lenses Index of refraction
Computer Vision. The Pinhole Camera Model
 Computer Vision The Pinhole Camera Model Filippo Bergamasco (filippo.bergamasco@unive.it) http://www.dais.unive.it/~bergamasco DAIS, Ca Foscari University of Venice Academic year 2017/2018 Imaging device
Computer Vision The Pinhole Camera Model Filippo Bergamasco (filippo.bergamasco@unive.it) http://www.dais.unive.it/~bergamasco DAIS, Ca Foscari University of Venice Academic year 2017/2018 Imaging device
Chapter 36. Image Formation
 Chapter 36 Image Formation Image of Formation Images can result when light rays encounter flat or curved surfaces between two media. Images can be formed either by reflection or refraction due to these
Chapter 36 Image Formation Image of Formation Images can result when light rays encounter flat or curved surfaces between two media. Images can be formed either by reflection or refraction due to these
Lecture 2: Geometrical Optics. Geometrical Approximation. Lenses. Mirrors. Optical Systems. Images and Pupils. Aberrations.
 Lecture 2: Geometrical Optics Outline 1 Geometrical Approximation 2 Lenses 3 Mirrors 4 Optical Systems 5 Images and Pupils 6 Aberrations Christoph U. Keller, Leiden Observatory, keller@strw.leidenuniv.nl
Lecture 2: Geometrical Optics Outline 1 Geometrical Approximation 2 Lenses 3 Mirrors 4 Optical Systems 5 Images and Pupils 6 Aberrations Christoph U. Keller, Leiden Observatory, keller@strw.leidenuniv.nl
IMAGE SENSOR SOLUTIONS. KAC-96-1/5" Lens Kit. KODAK KAC-96-1/5" Lens Kit. for use with the KODAK CMOS Image Sensors. November 2004 Revision 2
 KODAK for use with the KODAK CMOS Image Sensors November 2004 Revision 2 1.1 Introduction Choosing the right lens is a critical aspect of designing an imaging system. Typically the trade off between image
KODAK for use with the KODAK CMOS Image Sensors November 2004 Revision 2 1.1 Introduction Choosing the right lens is a critical aspect of designing an imaging system. Typically the trade off between image
Image acquisition. In both cases, the digital sensing element is one of the following: Line array Area array. Single sensor
 Image acquisition Digital images are acquired by direct digital acquisition (digital still/video cameras), or scanning material acquired as analog signals (slides, photographs, etc.). In both cases, the
Image acquisition Digital images are acquired by direct digital acquisition (digital still/video cameras), or scanning material acquired as analog signals (slides, photographs, etc.). In both cases, the
Chapter 36. Image Formation
 Chapter 36 Image Formation Notation for Mirrors and Lenses The object distance is the distance from the object to the mirror or lens Denoted by p The image distance is the distance from the image to the
Chapter 36 Image Formation Notation for Mirrors and Lenses The object distance is the distance from the object to the mirror or lens Denoted by p The image distance is the distance from the image to the
Laboratory experiment aberrations
 Laboratory experiment aberrations Obligatory laboratory experiment on course in Optical design, SK2330/SK3330, KTH. Date Name Pass Objective This laboratory experiment is intended to demonstrate the most
Laboratory experiment aberrations Obligatory laboratory experiment on course in Optical design, SK2330/SK3330, KTH. Date Name Pass Objective This laboratory experiment is intended to demonstrate the most
COURSE NAME: PHOTOGRAPHY AND AUDIO VISUAL PRODUCTION (VOCATIONAL) FOR UNDER GRADUATE (FIRST YEAR)
 FOR UNDER GRADUATE (FIRST YEAR)") COURSE NAME: PHOTOGRAPHY AND AUDIO VISUAL PRODUCTION (VOCATIONAL) FOR UNDER GRADUATE (FIRST YEAR) PAPER TITLE: BASIC PHOTOGRAPHIC UNIT - 3 : SIMPLE LENS TOPIC: LENS PROPERTIES AND DEFECTS OBJECTIVES By
COURSE NAME: PHOTOGRAPHY AND AUDIO VISUAL PRODUCTION (VOCATIONAL) FOR UNDER GRADUATE (FIRST YEAR) PAPER TITLE: BASIC PHOTOGRAPHIC UNIT - 3 : SIMPLE LENS TOPIC: LENS PROPERTIES AND DEFECTS OBJECTIVES By
AST Lab exercise: aberrations
 AST2210 - Lab exercise: aberrations 1 Introduction This lab exercise will take you through the most common types of aberrations. 2 Chromatic aberration Chromatic aberration causes lens to have dierent
AST2210 - Lab exercise: aberrations 1 Introduction This lab exercise will take you through the most common types of aberrations. 2 Chromatic aberration Chromatic aberration causes lens to have dierent
What will be on the midterm?
 What will be on the midterm? CS 178, Spring 2014 Marc Levoy Computer Science Department Stanford University General information 2 Monday, 7-9pm, Cubberly Auditorium (School of Edu) closed book, no notes
What will be on the midterm? CS 178, Spring 2014 Marc Levoy Computer Science Department Stanford University General information 2 Monday, 7-9pm, Cubberly Auditorium (School of Edu) closed book, no notes
Chapter 18 Optical Elements
 Chapter 18 Optical Elements GOALS When you have mastered the content of this chapter, you will be able to achieve the following goals: Definitions Define each of the following terms and use it in an operational
Chapter 18 Optical Elements GOALS When you have mastered the content of this chapter, you will be able to achieve the following goals: Definitions Define each of the following terms and use it in an operational
Announcements. The appearance of colors
 Announcements Introduction to Computer Vision CSE 152 Lecture 6 HW1 is assigned See links on web page for readings on color. Oscar Beijbom will be giving the lecture on Tuesday. I will not be holding office
Announcements Introduction to Computer Vision CSE 152 Lecture 6 HW1 is assigned See links on web page for readings on color. Oscar Beijbom will be giving the lecture on Tuesday. I will not be holding office
INTRODUCTION THIN LENSES. Introduction. given by the paraxial refraction equation derived last lecture: Thin lenses (19.1) = 1. Double-lens systems
 = 1. Double-lens systems") Chapter 9 OPTICAL INSTRUMENTS Introduction Thin lenses Double-lens systems Aberrations Camera Human eye Compound microscope Summary INTRODUCTION Knowledge of geometrical optics, diffraction and interference,
Chapter 9 OPTICAL INSTRUMENTS Introduction Thin lenses Double-lens systems Aberrations Camera Human eye Compound microscope Summary INTRODUCTION Knowledge of geometrical optics, diffraction and interference,
Image Formation and Camera Design
 Image Formation and Camera Design Spring 2003 CMSC 426 Jan Neumann 2/20/03 Light is all around us! From London & Upton, Photography Conventional camera design... Ken Kay, 1969 in Light & Film, TimeLife
Image Formation and Camera Design Spring 2003 CMSC 426 Jan Neumann 2/20/03 Light is all around us! From London & Upton, Photography Conventional camera design... Ken Kay, 1969 in Light & Film, TimeLife
Cameras. Shrinking the aperture. Camera trial #1. Pinhole camera. Digital Visual Effects Yung-Yu Chuang. Put a piece of film in front of an object.
 Camera trial #1 Cameras Digital Visual Effects Yung-Yu Chuang scene film with slides by Fredo Durand, Brian Curless, Steve Seitz and Alexei Efros Put a piece of film in front of an object. Pinhole camera
Camera trial #1 Cameras Digital Visual Effects Yung-Yu Chuang scene film with slides by Fredo Durand, Brian Curless, Steve Seitz and Alexei Efros Put a piece of film in front of an object. Pinhole camera
Cameras. Outline. Pinhole camera. Camera trial #1. Pinhole camera Film camera Digital camera Video camera
 Outline Cameras Pinhole camera Film camera Digital camera Video camera Digital Visual Effects, Spring 2007 Yung-Yu Chuang 2007/3/6 with slides by Fredo Durand, Brian Curless, Steve Seitz and Alexei Efros
Outline Cameras Pinhole camera Film camera Digital camera Video camera Digital Visual Effects, Spring 2007 Yung-Yu Chuang 2007/3/6 with slides by Fredo Durand, Brian Curless, Steve Seitz and Alexei Efros
The Camera : Computational Photography Alexei Efros, CMU, Fall 2005
 The Camera 15-463: Computational Photography Alexei Efros, CMU, Fall 2005 How do we see the world? object film Let s design a camera Idea 1: put a piece of film in front of an object Do we get a reasonable
The Camera 15-463: Computational Photography Alexei Efros, CMU, Fall 2005 How do we see the world? object film Let s design a camera Idea 1: put a piece of film in front of an object Do we get a reasonable
CS559: Computer Graphics. Lecture 2: Image Formation in Eyes and Cameras Li Zhang Spring 2008
 CS559: Computer Graphics Lecture 2: Image Formation in Eyes and Cameras Li Zhang Spring 2008 Today Eyes Cameras Light Why can we see? Visible Light and Beyond Infrared, e.g. radio wave longer wavelength
CS559: Computer Graphics Lecture 2: Image Formation in Eyes and Cameras Li Zhang Spring 2008 Today Eyes Cameras Light Why can we see? Visible Light and Beyond Infrared, e.g. radio wave longer wavelength
CHAPTER 18 REFRACTION & LENSES
 Physics Approximate Timeline Students are expected to keep up with class work when absent. CHAPTER 18 REFRACTION & LENSES Day Plans for the day Assignments for the day 1 18.1 Refraction of Light o Snell
Physics Approximate Timeline Students are expected to keep up with class work when absent. CHAPTER 18 REFRACTION & LENSES Day Plans for the day Assignments for the day 1 18.1 Refraction of Light o Snell
TSBB09 Image Sensors 2018-HT2. Image Formation Part 1
 TSBB09 Image Sensors 2018-HT2 Image Formation Part 1 Basic physics Electromagnetic radiation consists of electromagnetic waves With energy That propagate through space The waves consist of transversal
TSBB09 Image Sensors 2018-HT2 Image Formation Part 1 Basic physics Electromagnetic radiation consists of electromagnetic waves With energy That propagate through space The waves consist of transversal
Optical Components for Laser Applications. Günter Toesko - Laserseminar BLZ im Dezember
 Günter Toesko - Laserseminar BLZ im Dezember 2009 1 Aberrations An optical aberration is a distortion in the image formed by an optical system compared to the original. It can arise for a number of reasons
Günter Toesko - Laserseminar BLZ im Dezember 2009 1 Aberrations An optical aberration is a distortion in the image formed by an optical system compared to the original. It can arise for a number of reasons
ECEG105/ECEU646 Optics for Engineers Course Notes Part 4: Apertures, Aberrations Prof. Charles A. DiMarzio Northeastern University Fall 2008
 ECEG105/ECEU646 Optics for Engineers Course Notes Part 4: Apertures, Aberrations Prof. Charles A. DiMarzio Northeastern University Fall 2008 July 2003+ Chuck DiMarzio, Northeastern University 11270-04-1
ECEG105/ECEU646 Optics for Engineers Course Notes Part 4: Apertures, Aberrations Prof. Charles A. DiMarzio Northeastern University Fall 2008 July 2003+ Chuck DiMarzio, Northeastern University 11270-04-1
Chapter 25. Optical Instruments
 Chapter 25 Optical Instruments Optical Instruments Analysis generally involves the laws of reflection and refraction Analysis uses the procedures of geometric optics To explain certain phenomena, the wave
Chapter 25 Optical Instruments Optical Instruments Analysis generally involves the laws of reflection and refraction Analysis uses the procedures of geometric optics To explain certain phenomena, the wave
Chapter 23. Light Geometric Optics
 Chapter 23. Light Geometric Optics There are 3 basic ways to gather light and focus it to make an image. Pinhole - Simple geometry Mirror - Reflection Lens - Refraction Pinhole Camera Image Formation (the
Chapter 23. Light Geometric Optics There are 3 basic ways to gather light and focus it to make an image. Pinhole - Simple geometry Mirror - Reflection Lens - Refraction Pinhole Camera Image Formation (the
Ch 24. Geometric Optics
 text concept Ch 24. Geometric Optics Fig. 24 3 A point source of light P and its image P, in a plane mirror. Angle of incidence =angle of reflection. text. Fig. 24 4 The blue dashed line through object
text concept Ch 24. Geometric Optics Fig. 24 3 A point source of light P and its image P, in a plane mirror. Angle of incidence =angle of reflection. text. Fig. 24 4 The blue dashed line through object
Chapter 25 Optical Instruments
 Chapter 25 Optical Instruments Units of Chapter 25 Cameras, Film, and Digital The Human Eye; Corrective Lenses Magnifying Glass Telescopes Compound Microscope Aberrations of Lenses and Mirrors Limits of
Chapter 25 Optical Instruments Units of Chapter 25 Cameras, Film, and Digital The Human Eye; Corrective Lenses Magnifying Glass Telescopes Compound Microscope Aberrations of Lenses and Mirrors Limits of
Announcement A total of 5 (five) late days are allowed for projects. Office hours
 late days are allowed for projects. Office hours") Announcement A total of 5 (five) late days are allowed for projects. Office hours Me: 3:50-4:50pm Thursday (or by appointment) Jake: 12:30-1:30PM Monday and Wednesday Image Formation Digital Camera Film
Announcement A total of 5 (five) late days are allowed for projects. Office hours Me: 3:50-4:50pm Thursday (or by appointment) Jake: 12:30-1:30PM Monday and Wednesday Image Formation Digital Camera Film
Explanation of Aberration and Wavefront
 Explanation of Aberration and Wavefront 1. What Causes Blur? 2. What is? 4. What is wavefront? 5. Hartmann-Shack Aberrometer 6. Adoption of wavefront technology David Oh 1. What Causes Blur? 2. What is?
Explanation of Aberration and Wavefront 1. What Causes Blur? 2. What is? 4. What is wavefront? 5. Hartmann-Shack Aberrometer 6. Adoption of wavefront technology David Oh 1. What Causes Blur? 2. What is?
Lecture 2 Digital Image Fundamentals. Lin ZHANG, PhD School of Software Engineering Tongji University Fall 2016
 Lecture 2 Digital Image Fundamentals Lin ZHANG, PhD School of Software Engineering Tongji University Fall 2016 Contents Elements of visual perception Light and the electromagnetic spectrum Image sensing
Lecture 2 Digital Image Fundamentals Lin ZHANG, PhD School of Software Engineering Tongji University Fall 2016 Contents Elements of visual perception Light and the electromagnetic spectrum Image sensing
Geometric optics & aberrations
 Geometric optics & aberrations Department of Astrophysical Sciences University AST 542 http://www.northerneye.co.uk/ Outline Introduction: Optics in astronomy Basics of geometric optics Paraxial approximation
Geometric optics & aberrations Department of Astrophysical Sciences University AST 542 http://www.northerneye.co.uk/ Outline Introduction: Optics in astronomy Basics of geometric optics Paraxial approximation
Converging and Diverging Surfaces. Lenses. Converging Surface
 Lenses Sandy Skoglund 2 Converging and Diverging s AIR Converging If the surface is convex, it is a converging surface in the sense that the parallel rays bend toward each other after passing through the
Lenses Sandy Skoglund 2 Converging and Diverging s AIR Converging If the surface is convex, it is a converging surface in the sense that the parallel rays bend toward each other after passing through the
Cameras. Digital Visual Effects, Spring 2008 Yung-Yu Chuang 2008/2/26. with slides by Fredo Durand, Brian Curless, Steve Seitz and Alexei Efros
 Cameras Digital Visual Effects, Spring 2008 Yung-Yu Chuang 2008/2/26 with slides by Fredo Durand, Brian Curless, Steve Seitz and Alexei Efros Camera trial #1 scene film Put a piece of film in front of
Cameras Digital Visual Effects, Spring 2008 Yung-Yu Chuang 2008/2/26 with slides by Fredo Durand, Brian Curless, Steve Seitz and Alexei Efros Camera trial #1 scene film Put a piece of film in front of
Physics 1230: Light and Color. Guest Lecture, Jack again. Lecture 23: More about cameras
 Physics 1230: Light and Color Chuck Rogers, Charles.Rogers@colorado.edu Ryan Henley, Valyria McFarland, Peter Siegfried physicscourses.colorado.edu/phys1230 Guest Lecture, Jack again Lecture 23: More about
Physics 1230: Light and Color Chuck Rogers, Charles.Rogers@colorado.edu Ryan Henley, Valyria McFarland, Peter Siegfried physicscourses.colorado.edu/phys1230 Guest Lecture, Jack again Lecture 23: More about
How do we see the world?
 The Camera 1 How do we see the world? Let s design a camera Idea 1: put a piece of film in front of an object Do we get a reasonable image? Credit: Steve Seitz 2 Pinhole camera Idea 2: Add a barrier to
The Camera 1 How do we see the world? Let s design a camera Idea 1: put a piece of film in front of an object Do we get a reasonable image? Credit: Steve Seitz 2 Pinhole camera Idea 2: Add a barrier to
Lecture Outline Chapter 27. Physics, 4 th Edition James S. Walker. Copyright 2010 Pearson Education, Inc.
 Lecture Outline Chapter 27 Physics, 4 th Edition James S. Walker Chapter 27 Optical Instruments Units of Chapter 27 The Human Eye and the Camera Lenses in Combination and Corrective Optics The Magnifying
Lecture Outline Chapter 27 Physics, 4 th Edition James S. Walker Chapter 27 Optical Instruments Units of Chapter 27 The Human Eye and the Camera Lenses in Combination and Corrective Optics The Magnifying
The Xiris Glossary of Machine Vision Terminology
 X The Xiris Glossary of Machine Vision Terminology 2 Introduction Automated welding, camera technology, and digital image processing are all complex subjects. When you combine them in a system featuring
X The Xiris Glossary of Machine Vision Terminology 2 Introduction Automated welding, camera technology, and digital image processing are all complex subjects. When you combine them in a system featuring
Performance Factors. Technical Assistance. Fundamental Optics
 Performance Factors After paraxial formulas have been used to select values for component focal length(s) and diameter(s), the final step is to select actual lenses. As in any engineering problem, this
Performance Factors After paraxial formulas have been used to select values for component focal length(s) and diameter(s), the final step is to select actual lenses. As in any engineering problem, this
UNIVERSITY OF NAIROBI COLLEGE OF EDUCATION AND EXTERNAL STUDIES
 UNIVERSITY OF NAIROBI COLLEGE OF EDUCATION AND EXTERNAL STUDIES COURSE TITLE: BED (SCIENCE) UNIT TITLE: WAVES AND OPTICS UNIT CODE: SPH 103 UNIT AUTHOR: PROF. R.O. GENGA DEPARTMENT OF PHYSICS UNIVERSITY
UNIVERSITY OF NAIROBI COLLEGE OF EDUCATION AND EXTERNAL STUDIES COURSE TITLE: BED (SCIENCE) UNIT TITLE: WAVES AND OPTICS UNIT CODE: SPH 103 UNIT AUTHOR: PROF. R.O. GENGA DEPARTMENT OF PHYSICS UNIVERSITY
Optical Systems: Pinhole Camera Pinhole camera: simple hole in a box: Called Camera Obscura Aristotle discussed, Al-Hazen analyzed in Book of Optics
 Optical Systems: Pinhole Camera Pinhole camera: simple hole in a box: Called Camera Obscura Aristotle discussed, Al-Hazen analyzed in Book of Optics 1011CE Restricts rays: acts as a single lens: inverts
Optical Systems: Pinhole Camera Pinhole camera: simple hole in a box: Called Camera Obscura Aristotle discussed, Al-Hazen analyzed in Book of Optics 1011CE Restricts rays: acts as a single lens: inverts
CPSC 4040/6040 Computer Graphics Images. Joshua Levine
 CPSC 4040/6040 Computer Graphics Images Joshua Levine levinej@clemson.edu Lecture 04 Displays and Optics Sept. 1, 2015 Slide Credits: Kenny A. Hunt Don House Torsten Möller Hanspeter Pfister Agenda Open
CPSC 4040/6040 Computer Graphics Images Joshua Levine levinej@clemson.edu Lecture 04 Displays and Optics Sept. 1, 2015 Slide Credits: Kenny A. Hunt Don House Torsten Möller Hanspeter Pfister Agenda Open
Overview. Image formation - 1
 Overview perspective imaging Image formation Refraction of light Thin-lens equation Optical power and accommodation Image irradiance and scene radiance Digital images Introduction to MATLAB Image formation
Overview perspective imaging Image formation Refraction of light Thin-lens equation Optical power and accommodation Image irradiance and scene radiance Digital images Introduction to MATLAB Image formation
Lens Principal and Nodal Points
 Lens Principal and Nodal Points Douglas A. Kerr, P.E. Issue 3 January 21, 2004 ABSTRACT In discussions of photographic lenses, we often hear of the importance of the principal points and nodal points of
Lens Principal and Nodal Points Douglas A. Kerr, P.E. Issue 3 January 21, 2004 ABSTRACT In discussions of photographic lenses, we often hear of the importance of the principal points and nodal points of
30 Lenses. Lenses change the paths of light.
 Lenses change the paths of light. A light ray bends as it enters glass and bends again as it leaves. Light passing through glass of a certain shape can form an image that appears larger, smaller, closer,
Lenses change the paths of light. A light ray bends as it enters glass and bends again as it leaves. Light passing through glass of a certain shape can form an image that appears larger, smaller, closer,
Image Formation. Dr. Gerhard Roth. COMP 4102A Winter 2014 Version 1
 Image Formation Dr. Gerhard Roth COMP 4102A Winter 2014 Version 1 Image Formation Two type of images Intensity image encodes light intensities (passive sensor) Range (depth) image encodes shape and distance
Image Formation Dr. Gerhard Roth COMP 4102A Winter 2014 Version 1 Image Formation Two type of images Intensity image encodes light intensities (passive sensor) Range (depth) image encodes shape and distance
Cameras and Sensors. Today. Today. It receives light from all directions. BIL721: Computational Photography! Spring 2015, Lecture 2!
 !! Cameras and Sensors Today Pinhole camera! Lenses! Exposure! Sensors! photo by Abelardo Morell BIL721: Computational Photography! Spring 2015, Lecture 2! Aykut Erdem! Hacettepe University! Computer Vision
!! Cameras and Sensors Today Pinhole camera! Lenses! Exposure! Sensors! photo by Abelardo Morell BIL721: Computational Photography! Spring 2015, Lecture 2! Aykut Erdem! Hacettepe University! Computer Vision
BIOPHYSICS OF VISION GEOMETRIC OPTICS OF HUMAN EYE. Refraction media of the human eye. D eye = 63 diopter, D cornea =40, D lens = 15+
 BIOPHYSICS OF VISION THEORY OF COLOR VISION ELECTRORETINOGRAM Two problems: All cows are black in dark! Playing tennis in dark with illuminated lines, rackets, net, and ball! Refraction media of the human
BIOPHYSICS OF VISION THEORY OF COLOR VISION ELECTRORETINOGRAM Two problems: All cows are black in dark! Playing tennis in dark with illuminated lines, rackets, net, and ball! Refraction media of the human
ECEN 4606, UNDERGRADUATE OPTICS LAB
 ECEN 4606, UNDERGRADUATE OPTICS LAB Lab 2: Imaging 1 the Telescope Original Version: Prof. McLeod SUMMARY: In this lab you will become familiar with the use of one or more lenses to create images of distant
ECEN 4606, UNDERGRADUATE OPTICS LAB Lab 2: Imaging 1 the Telescope Original Version: Prof. McLeod SUMMARY: In this lab you will become familiar with the use of one or more lenses to create images of distant
Chapter 26. The Refraction of Light: Lenses and Optical Instruments
 Chapter 26 The Refraction of Light: Lenses and Optical Instruments 26.1 The Index of Refraction Light travels through a vacuum at a speed c=3. 00 10 8 m/ s Light travels through materials at a speed less
Chapter 26 The Refraction of Light: Lenses and Optical Instruments 26.1 The Index of Refraction Light travels through a vacuum at a speed c=3. 00 10 8 m/ s Light travels through materials at a speed less
Camera Simulation. References. Photography, B. London and J. Upton Optics in Photography, R. Kingslake The Camera, The Negative, The Print, A.
 Camera Simulation Effect Cause Field of view Film size, focal length Depth of field Aperture, focal length Exposure Film speed, aperture, shutter Motion blur Shutter References Photography, B. London and
Camera Simulation Effect Cause Field of view Film size, focal length Depth of field Aperture, focal length Exposure Film speed, aperture, shutter Motion blur Shutter References Photography, B. London and
Introduction. Related Work
 Introduction Depth of field is a natural phenomenon when it comes to both sight and photography. The basic ray tracing camera model is insufficient at representing this essential visual element and will
Introduction Depth of field is a natural phenomenon when it comes to both sight and photography. The basic ray tracing camera model is insufficient at representing this essential visual element and will
General Imaging System
 General Imaging System Lecture Slides ME 4060 Machine Vision and Vision-based Control Chapter 5 Image Sensing and Acquisition By Dr. Debao Zhou 1 2 Light, Color, and Electromagnetic Spectrum Penetrate
General Imaging System Lecture Slides ME 4060 Machine Vision and Vision-based Control Chapter 5 Image Sensing and Acquisition By Dr. Debao Zhou 1 2 Light, Color, and Electromagnetic Spectrum Penetrate
APPLICATIONS FOR TELECENTRIC LIGHTING
 APPLICATIONS FOR TELECENTRIC LIGHTING Telecentric lenses used in combination with telecentric lighting provide the most accurate results for measurement of object shapes and geometries. They make attributes
APPLICATIONS FOR TELECENTRIC LIGHTING Telecentric lenses used in combination with telecentric lighting provide the most accurate results for measurement of object shapes and geometries. They make attributes