Overview. Pinhole camera model Projective geometry Vanishing points and lines Projection matrix Cameras with Lenses Color Digital image
|
|
|
- Steven Bradford
- 5 years ago
- Views:
Transcription

1 Camera & Color
2 Overview Pinhole camera model Projective geometry Vanishing points and lines Projection matrix Cameras with Lenses Color Digital image Book: Hartley 6.1, Szeliski 2.1.5, 2.2, 2.3
3 The trip of Light Light source properties Sensor characteristics Exposure Optics Surface shape Surface reflectance properties
4 Image formation Let's design a camera. Is this going to work? object film
5 Pinhole Camera object barrier film Add a barrier to block off most of the rays This reduces blurring The opening known as the aperture
6 Pinhole Camera f f c f = focal length c = camera center
7 Dimensionality Reduction 3D to 2D 3D world Pointofobservation 2D image
8 Projection Illusion

9 Projection Illusion
10 Projective Geometry Lost Properties Length (size) Angles Shape Invariant Properties Straight Lines
11 Projective Geometry Angles-Shape
12 Projective Geometry Length-Size

13 Projective Geometry Straight Lines
14 Projection Properties Many-to-one: any point along the same ray map to the same point in the image. Points Points Lines Lines Line through the camera center projects to a point. Planes Planes Plane through the camera center projects to a line.

15 Vanishing Points Parallel lines in the world intersect in the image at a vanishing point Vanishing Point

16 Vanishing Lines Planes in the world form the vanishing line in the image. Vanishing Line
17 Vanishing Lines camera center plane in the scene Horizon: vanishing line of the ground plane.
18 Homogeneous Coordinates Converting to homogeneous coordinates homogeneous image coordinates homogeneous scene coordinates Converting from homogeneous coordinates
19 Projection 3D World Coordinates to 2D Image Coordinates [] u p= v Y Y c Z o v f Z c: Camera center o: Optical center (0,0) i: Image plane X i Intrinsic Assumptions Unit aspect ratio Optical center at (0,0) Extrinsic Assumptions No rotation Camera at (0,0,0) ][ ] X Projection u f Y w v =0 f 0 0 Matrix: Z [][ [] X P= Y Z
20 Projection Matrix [] u p= v Y Y c Z o v f Z X i c: Camera center o: Optical center (u0,v0) i: Image plane [] X P= Y Z If the position of the optical center is at (u 0,v0): K:intrinsic matrix [][ f 0 u0 u w v = 0 f v ][ ] X 0 Y 0 Z 0 1 x=k [ I 0 ] X Rotation (R), Translation (t) x=k [ R t ] X

21 Field of View
22 Field of View Y c φ Z d o f X i 1 ϕ=tan (d /2f )
23 Lenses focal point f A lens focuses light onto the film.
24 Lens Focus circle of confusion There is a specific distance at which objects are in focus.


25 Lens Focus Depth of Field
26 Depth of Field and Aperture Changing the aperture size affects depth of field A smaller aperture increases the range in which the object is approximately in focus But small aperture reduces amount of light need to increase exposure

27 Lens flaws: Spherical aberration Rays farther from the optical axis focus closer.


28 Lens flaws: Vingetting

29 Radial Distortion Caused by imperfect lenses Deviations are most noticeable on the edges. No distortion Pin cushion Barrel


30 Real Lenses
31 Color

32 What is color? Color is the result of interaction between physical light in the environment and our visual system Color is a psychological property of our visual experiences when we look at objects and lights, not a physical property of those objects or lights (S. Palmer, Vision Science: Photons to Phenomenology) Wassily Kandinsky, Murnau Street with Women, 1908
.")
33 Physics of Light A source of light can be described physically by its spectrum: the amount of energy emitted at each wavelength (~ nm).

34 Color Perception by Humans Photoreceptor cells: Rods and cones on the retina. Rods provide black and white vision. Cones provide color vision. 3 kind of cones.

35 Color Perception by Humans Rods and cones act as filters on the spectrum:to get the output of a filter, multiply its response curve by the spectrum, integrate over all wavelengths

 Gray: (v,v,v) White:")
36 RGB Color Space Additive color model. Each pixel is characterized by a value for each of the three components: (vr,vg,vb). Examples: Black: (0,0,0) Gray: (v,v,v) White: (vmax,vmax,vmax)

37 Uses of Color in Computer Vision Skin Detection

38 Uses of Color in Computer Vision Image Segmentation and Retrieval


39 Digital Camera
40 Digital Image - Binary

41 Digital Image - Grayscale

42 Digital Image - Color
43 Digitization Digital camera, scanner. Quality depends on: Spatial Sampling (image resolution, number of pixels). Depth (number of intensity values).

44 Digitization Spatial Sampling Initial image Sampling points Coarse sampling Dense sampling
45 Sampling Interval Look at the fence: Sampling interval White image! Grey image!
46 Sampling Interval Look at the fence: Sampling interval Now the fence is visible!
47 Sampling Theorem If the width of the thinest structure is d, then the sampling interval should be smaller than d/2.
48 Image Quantization Determines the value of each sample. Mapping between analog continuous values and K digital quantized values. K-1 Quantization Level Signal Value M

49 Selection of K Gray Scale Image Analog image K=2 K=4 K=16 K=32

 K=4 (for each")
50 Selection of K - Color Image Analog Image K=2 (for each color) K=4 (for each color)

51 Loss during Quantization
52 Loss during Spatial Sampling
53 Image Histogram H H(i) is the number of image pixels that have the value i. 8 Pixel Count For a MxN image: I max 4 3 H (i) MN Gray Value 6 7 i I min


54 Histogram Examples
55 ? Questions?
The Camera : Computational Photography Alexei Efros, CMU, Fall 2008
 The Camera 15-463: Computational Photography Alexei Efros, CMU, Fall 2008 How do we see the world? object film Let s design a camera Idea 1: put a piece of film in front of an object Do we get a reasonable
The Camera 15-463: Computational Photography Alexei Efros, CMU, Fall 2008 How do we see the world? object film Let s design a camera Idea 1: put a piece of film in front of an object Do we get a reasonable
Projection. Readings. Szeliski 2.1. Wednesday, October 23, 13
 Projection Readings Szeliski 2.1 Projection Readings Szeliski 2.1 Müller-Lyer Illusion by Pravin Bhat Müller-Lyer Illusion by Pravin Bhat http://www.michaelbach.de/ot/sze_muelue/index.html Müller-Lyer
Projection Readings Szeliski 2.1 Projection Readings Szeliski 2.1 Müller-Lyer Illusion by Pravin Bhat Müller-Lyer Illusion by Pravin Bhat http://www.michaelbach.de/ot/sze_muelue/index.html Müller-Lyer
Projection. Announcements. Müller-Lyer Illusion. Image formation. Readings Nalwa 2.1
 Announcements Mailing list (you should have received messages) Project 1 additional test sequences online Projection Readings Nalwa 2.1 Müller-Lyer Illusion Image formation object film by Pravin Bhat http://www.michaelbach.de/ot/sze_muelue/index.html
Announcements Mailing list (you should have received messages) Project 1 additional test sequences online Projection Readings Nalwa 2.1 Müller-Lyer Illusion Image formation object film by Pravin Bhat http://www.michaelbach.de/ot/sze_muelue/index.html
The Camera : Computational Photography Alexei Efros, CMU, Fall 2005
 The Camera 15-463: Computational Photography Alexei Efros, CMU, Fall 2005 How do we see the world? object film Let s design a camera Idea 1: put a piece of film in front of an object Do we get a reasonable
The Camera 15-463: Computational Photography Alexei Efros, CMU, Fall 2005 How do we see the world? object film Let s design a camera Idea 1: put a piece of film in front of an object Do we get a reasonable
Projection. Projection. Image formation. Müller-Lyer Illusion. Readings. Readings. Let s design a camera. Szeliski 2.1. Szeliski 2.
 Projection Projection Readings Szeliski 2.1 Readings Szeliski 2.1 Müller-Lyer Illusion Image formation object film by Pravin Bhat http://www.michaelbach.de/ot/sze_muelue/index.html Let s design a camera
Projection Projection Readings Szeliski 2.1 Readings Szeliski 2.1 Müller-Lyer Illusion Image formation object film by Pravin Bhat http://www.michaelbach.de/ot/sze_muelue/index.html Let s design a camera
Two strategies for realistic rendering capture real world data synthesize from bottom up
 Recap from Wednesday Two strategies for realistic rendering capture real world data synthesize from bottom up Both have existed for 500 years. Both are successful. Attempts to take the best of both world
Recap from Wednesday Two strategies for realistic rendering capture real world data synthesize from bottom up Both have existed for 500 years. Both are successful. Attempts to take the best of both world
IMAGE FORMATION. Light source properties. Sensor characteristics Surface. Surface reflectance properties. Optics
 IMAGE FORMATION Light source properties Sensor characteristics Surface Exposure shape Optics Surface reflectance properties ANALOG IMAGES An image can be understood as a 2D light intensity function f(x,y)
IMAGE FORMATION Light source properties Sensor characteristics Surface Exposure shape Optics Surface reflectance properties ANALOG IMAGES An image can be understood as a 2D light intensity function f(x,y)
Computer Vision. The Pinhole Camera Model
 Computer Vision The Pinhole Camera Model Filippo Bergamasco (filippo.bergamasco@unive.it) http://www.dais.unive.it/~bergamasco DAIS, Ca Foscari University of Venice Academic year 2017/2018 Imaging device
Computer Vision The Pinhole Camera Model Filippo Bergamasco (filippo.bergamasco@unive.it) http://www.dais.unive.it/~bergamasco DAIS, Ca Foscari University of Venice Academic year 2017/2018 Imaging device
Cameras. CSE 455, Winter 2010 January 25, 2010
 Cameras CSE 455, Winter 2010 January 25, 2010 Announcements New Lecturer! Neel Joshi, Ph.D. Post-Doctoral Researcher Microsoft Research neel@cs Project 1b (seam carving) was due on Friday the 22 nd Project
Cameras CSE 455, Winter 2010 January 25, 2010 Announcements New Lecturer! Neel Joshi, Ph.D. Post-Doctoral Researcher Microsoft Research neel@cs Project 1b (seam carving) was due on Friday the 22 nd Project
Unit 1: Image Formation
 Unit 1: Image Formation 1. Geometry 2. Optics 3. Photometry 4. Sensor Readings Szeliski 2.1-2.3 & 6.3.5 1 Physical parameters of image formation Geometric Type of projection Camera pose Optical Sensor
Unit 1: Image Formation 1. Geometry 2. Optics 3. Photometry 4. Sensor Readings Szeliski 2.1-2.3 & 6.3.5 1 Physical parameters of image formation Geometric Type of projection Camera pose Optical Sensor
CSE 527: Introduction to Computer Vision
 CSE 527: Introduction to Computer Vision Week 2 - Class 2: Vision, Physics, Cameras September 7th, 2017 Today Physics Human Vision Eye Brain Perspective Projection Camera Models Image Formation Digital
CSE 527: Introduction to Computer Vision Week 2 - Class 2: Vision, Physics, Cameras September 7th, 2017 Today Physics Human Vision Eye Brain Perspective Projection Camera Models Image Formation Digital
CS6670: Computer Vision
 CS6670: Computer Vision Noah Snavely Lecture 5: Cameras and Projection Szeliski 2.1.3-2.1.6 Reading Announcements Project 1 assigned, see projects page: http://www.cs.cornell.edu/courses/cs6670/2011sp/projects/projects.html
CS6670: Computer Vision Noah Snavely Lecture 5: Cameras and Projection Szeliski 2.1.3-2.1.6 Reading Announcements Project 1 assigned, see projects page: http://www.cs.cornell.edu/courses/cs6670/2011sp/projects/projects.html
Image formation - Cameras. Grading & Project. About the course. Tentative Schedule. Course Content. Students introduction
 About the course Instructors: Haibin Ling (hbling@temple, Wachman 35) Hours Lecture: Tuesda 5:3-8:pm, TTLMAN 43B Office hour: Tuesda 3: - 5:pm, or b appointment Textbook Computer Vision: Models, Learning,
About the course Instructors: Haibin Ling (hbling@temple, Wachman 35) Hours Lecture: Tuesda 5:3-8:pm, TTLMAN 43B Office hour: Tuesda 3: - 5:pm, or b appointment Textbook Computer Vision: Models, Learning,
How do we see the world?
 The Camera 1 How do we see the world? Let s design a camera Idea 1: put a piece of film in front of an object Do we get a reasonable image? Credit: Steve Seitz 2 Pinhole camera Idea 2: Add a barrier to
The Camera 1 How do we see the world? Let s design a camera Idea 1: put a piece of film in front of an object Do we get a reasonable image? Credit: Steve Seitz 2 Pinhole camera Idea 2: Add a barrier to
LENSES. INEL 6088 Computer Vision
 LENSES INEL 6088 Computer Vision Digital camera A digital camera replaces film with a sensor array Each cell in the array is a Charge Coupled Device light-sensitive diode that converts photons to electrons
LENSES INEL 6088 Computer Vision Digital camera A digital camera replaces film with a sensor array Each cell in the array is a Charge Coupled Device light-sensitive diode that converts photons to electrons
Capturing light and color
 Capturing light and color Friday, 10/02/2017 Antonis Argyros e-mail: argyros@csd.uoc.gr Szeliski 2.2, 2.3, 3.1 1 Recap from last lecture Pinhole camera model Perspective projection Focal length and depth/field
Capturing light and color Friday, 10/02/2017 Antonis Argyros e-mail: argyros@csd.uoc.gr Szeliski 2.2, 2.3, 3.1 1 Recap from last lecture Pinhole camera model Perspective projection Focal length and depth/field
CSE 473/573 Computer Vision and Image Processing (CVIP)
") CSE 473/573 Computer Vision and Image Processing (CVIP) Ifeoma Nwogu inwogu@buffalo.edu Lecture 4 Image formation(part I) Schedule Last class linear algebra overview Today Image formation and camera properties
CSE 473/573 Computer Vision and Image Processing (CVIP) Ifeoma Nwogu inwogu@buffalo.edu Lecture 4 Image formation(part I) Schedule Last class linear algebra overview Today Image formation and camera properties
Building a Real Camera. Slides Credit: Svetlana Lazebnik
 Building a Real Camera Slides Credit: Svetlana Lazebnik Home-made pinhole camera Slide by A. Efros http://www.debevec.org/pinhole/ Shrinking the aperture Why not make the aperture as small as possible?
Building a Real Camera Slides Credit: Svetlana Lazebnik Home-made pinhole camera Slide by A. Efros http://www.debevec.org/pinhole/ Shrinking the aperture Why not make the aperture as small as possible?
Building a Real Camera
 Building a Real Camera Home-made pinhole camera Slide by A. Efros http://www.debevec.org/pinhole/ Shrinking the aperture Why not make the aperture as small as possible? Less light gets through Diffraction
Building a Real Camera Home-made pinhole camera Slide by A. Efros http://www.debevec.org/pinhole/ Shrinking the aperture Why not make the aperture as small as possible? Less light gets through Diffraction
Dr F. Cuzzolin 1. September 29, 2015
 P00407 Principles of Computer Vision 1 1 Department of Computing and Communication Technologies Oxford Brookes University, UK September 29, 2015 September 29, 2015 1 / 73 Outline of the Lecture 1 2 Basics
P00407 Principles of Computer Vision 1 1 Department of Computing and Communication Technologies Oxford Brookes University, UK September 29, 2015 September 29, 2015 1 / 73 Outline of the Lecture 1 2 Basics
Lecture 7: Camera Models
 Lecture 7: Camera Models Professor Stanford Vision Lab 1 What we will learn toda? Pinhole cameras Cameras & lenses The geometr of pinhole cameras Reading: [FP]Chapters 1 3 [HZ] Chapter 6 2 What we will
Lecture 7: Camera Models Professor Stanford Vision Lab 1 What we will learn toda? Pinhole cameras Cameras & lenses The geometr of pinhole cameras Reading: [FP]Chapters 1 3 [HZ] Chapter 6 2 What we will
Digital Image Processing COSC 6380/4393
 Digital Image Processing COSC 6380/4393 Lecture 2 Aug 24 th, 2017 Slides from Dr. Shishir K Shah, Rajesh Rao and Frank (Qingzhong) Liu 1 Instructor TA Digital Image Processing COSC 6380/4393 Pranav Mantini
Digital Image Processing COSC 6380/4393 Lecture 2 Aug 24 th, 2017 Slides from Dr. Shishir K Shah, Rajesh Rao and Frank (Qingzhong) Liu 1 Instructor TA Digital Image Processing COSC 6380/4393 Pranav Mantini
Image Formation and Capture
 Figure credits: B. Curless, E. Hecht, W.J. Smith, B.K.P. Horn, A. Theuwissen, and J. Malik Image Formation and Capture COS 429: Computer Vision Image Formation and Capture Real world Optics Sensor Devices
Figure credits: B. Curless, E. Hecht, W.J. Smith, B.K.P. Horn, A. Theuwissen, and J. Malik Image Formation and Capture COS 429: Computer Vision Image Formation and Capture Real world Optics Sensor Devices
Sensors and Sensing Cameras and Camera Calibration
 Sensors and Sensing Cameras and Camera Calibration Todor Stoyanov Mobile Robotics and Olfaction Lab Center for Applied Autonomous Sensor Systems Örebro University, Sweden todor.stoyanov@oru.se 20.11.2014
Sensors and Sensing Cameras and Camera Calibration Todor Stoyanov Mobile Robotics and Olfaction Lab Center for Applied Autonomous Sensor Systems Örebro University, Sweden todor.stoyanov@oru.se 20.11.2014
CS6670: Computer Vision
 CS6670: Computer Vision Noah Snavely Lecture 4a: Cameras Source: S. Lazebnik Reading Szeliski chapter 2.2.3, 2.3 Image formation Let s design a camera Idea 1: put a piece of film in front of an object
CS6670: Computer Vision Noah Snavely Lecture 4a: Cameras Source: S. Lazebnik Reading Szeliski chapter 2.2.3, 2.3 Image formation Let s design a camera Idea 1: put a piece of film in front of an object
Digital Image Processing
 Part 1: Course Introduction Achim J. Lilienthal AASS Learning Systems Lab, Dep. Teknik Room T1209 (Fr, 11-12 o'clock) achim.lilienthal@oru.se Course Book Chapters 1 & 2 2011-04-05 Contents 1. Introduction
Part 1: Course Introduction Achim J. Lilienthal AASS Learning Systems Lab, Dep. Teknik Room T1209 (Fr, 11-12 o'clock) achim.lilienthal@oru.se Course Book Chapters 1 & 2 2011-04-05 Contents 1. Introduction
Digital Image Processing COSC 6380/4393
 Digital Image Processing COSC 6380/4393 Lecture 2 Aug 23 rd, 2018 Slides from Dr. Shishir K Shah, Rajesh Rao and Frank (Qingzhong) Liu 1 Instructor Digital Image Processing COSC 6380/4393 Pranav Mantini
Digital Image Processing COSC 6380/4393 Lecture 2 Aug 23 rd, 2018 Slides from Dr. Shishir K Shah, Rajesh Rao and Frank (Qingzhong) Liu 1 Instructor Digital Image Processing COSC 6380/4393 Pranav Mantini
Acquisition. Some slides from: Yung-Yu Chuang (DigiVfx) Jan Neumann, Pat Hanrahan, Alexei Efros
 Jan Neumann, Pat Hanrahan, Alexei Efros") Acquisition Some slides from: Yung-Yu Chuang (DigiVfx) Jan Neumann, Pat Hanrahan, Alexei Efros Image Acquisition Digital Camera Film Outline Pinhole camera Lens Lens aberrations Exposure Sensors Noise
Acquisition Some slides from: Yung-Yu Chuang (DigiVfx) Jan Neumann, Pat Hanrahan, Alexei Efros Image Acquisition Digital Camera Film Outline Pinhole camera Lens Lens aberrations Exposure Sensors Noise
Image Processing & Projective geometry
 Image Processing & Projective geometry Arunkumar Byravan Partial slides borrowed from Jianbo Shi & Steve Seitz Color spaces RGB Red, Green, Blue HSV Hue, Saturation, Value Why HSV? HSV separates luma,
Image Processing & Projective geometry Arunkumar Byravan Partial slides borrowed from Jianbo Shi & Steve Seitz Color spaces RGB Red, Green, Blue HSV Hue, Saturation, Value Why HSV? HSV separates luma,
Image Formation: Camera Model
 Image Formation: Camera Model Ruigang Yang COMP 684 Fall 2005, CS684-IBMR Outline Camera Models Pinhole Perspective Projection Affine Projection Camera with Lenses Digital Image Formation The Human Eye
Image Formation: Camera Model Ruigang Yang COMP 684 Fall 2005, CS684-IBMR Outline Camera Models Pinhole Perspective Projection Affine Projection Camera with Lenses Digital Image Formation The Human Eye
Chapters 1 & 2. Definitions and applications Conceptual basis of photogrammetric processing
 Chapters 1 & 2 Chapter 1: Photogrammetry Definitions and applications Conceptual basis of photogrammetric processing Transition from two-dimensional imagery to three-dimensional information Automation
Chapters 1 & 2 Chapter 1: Photogrammetry Definitions and applications Conceptual basis of photogrammetric processing Transition from two-dimensional imagery to three-dimensional information Automation
Colorado School of Mines. Computer Vision. Professor William Hoff Dept of Electrical Engineering &Computer Science.
 Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Sensors and Image Formation Imaging sensors and models of image formation Coordinate systems Digital
Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Sensors and Image Formation Imaging sensors and models of image formation Coordinate systems Digital
The Human Visual System. Lecture 1. The Human Visual System. The Human Eye. The Human Retina. cones. rods. horizontal. bipolar. amacrine.
 Lecture The Human Visual System The Human Visual System Retina Optic Nerve Optic Chiasm Lateral Geniculate Nucleus (LGN) Visual Cortex The Human Eye The Human Retina Lens rods cones Cornea Fovea Optic
Lecture The Human Visual System The Human Visual System Retina Optic Nerve Optic Chiasm Lateral Geniculate Nucleus (LGN) Visual Cortex The Human Eye The Human Retina Lens rods cones Cornea Fovea Optic
TSBB09 Image Sensors 2018-HT2. Image Formation Part 1
 TSBB09 Image Sensors 2018-HT2 Image Formation Part 1 Basic physics Electromagnetic radiation consists of electromagnetic waves With energy That propagate through space The waves consist of transversal
TSBB09 Image Sensors 2018-HT2 Image Formation Part 1 Basic physics Electromagnetic radiation consists of electromagnetic waves With energy That propagate through space The waves consist of transversal
Lenses, exposure, and (de)focus
focus") Lenses, exposure, and (de)focus http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 15 Course announcements Homework 4 is out. - Due October 26
Lenses, exposure, and (de)focus http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 15 Course announcements Homework 4 is out. - Due October 26
CPSC 425: Computer Vision
 1 / 55 CPSC 425: Computer Vision Instructor: Fred Tung ftung@cs.ubc.ca Department of Computer Science University of British Columbia Lecture Notes 2015/2016 Term 2 2 / 55 Menu January 7, 2016 Topics: Image
1 / 55 CPSC 425: Computer Vision Instructor: Fred Tung ftung@cs.ubc.ca Department of Computer Science University of British Columbia Lecture Notes 2015/2016 Term 2 2 / 55 Menu January 7, 2016 Topics: Image
Lenses. Overview. Terminology. The pinhole camera. Pinhole camera Lenses Principles of operation Limitations
 Overview Pinhole camera Principles of operation Limitations 1 Terminology The pinhole camera The first camera - camera obscura - known to Aristotle. In 3D, we can visualize the blur induced by the pinhole
Overview Pinhole camera Principles of operation Limitations 1 Terminology The pinhole camera The first camera - camera obscura - known to Aristotle. In 3D, we can visualize the blur induced by the pinhole
Image Formation. Dr. Gerhard Roth. COMP 4102A Winter 2015 Version 3
 Image Formation Dr. Gerhard Roth COMP 4102A Winter 2015 Version 3 1 Image Formation Two type of images Intensity image encodes light intensities (passive sensor) Range (depth) image encodes shape and distance
Image Formation Dr. Gerhard Roth COMP 4102A Winter 2015 Version 3 1 Image Formation Two type of images Intensity image encodes light intensities (passive sensor) Range (depth) image encodes shape and distance
Image and Multidimensional Signal Processing
 Image and Multidimensional Signal Processing Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ Digital Image Fundamentals 2 Digital Image Fundamentals
Image and Multidimensional Signal Processing Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ Digital Image Fundamentals 2 Digital Image Fundamentals
Lecture 7: homogeneous coordinates
 Lecture 7: homogeneous Dr. Richard E. Turner (ret26@cam.ac.uk) October 31, 2013 House keeping webpage: http://cbl.eng.cam.ac.uk/public/turner/teaching Recap of last lecture: Pin hole camera image plane
Lecture 7: homogeneous Dr. Richard E. Turner (ret26@cam.ac.uk) October 31, 2013 House keeping webpage: http://cbl.eng.cam.ac.uk/public/turner/teaching Recap of last lecture: Pin hole camera image plane
Lecture 2 Camera Models
 Lecture 2 Camera Models Professor Silvio Savarese Computational Vision and Geometr Lab Silvio Savarese Lecture 2-4-Jan-4 Announcements Prerequisites: an questions? This course requires knowledge of linear
Lecture 2 Camera Models Professor Silvio Savarese Computational Vision and Geometr Lab Silvio Savarese Lecture 2-4-Jan-4 Announcements Prerequisites: an questions? This course requires knowledge of linear
CS 443: Imaging and Multimedia Cameras and Lenses
 CS 443: Imaging and Multimedia Cameras and Lenses Spring 2008 Ahmed Elgammal Dept of Computer Science Rutgers University Outlines Cameras and lenses! 1 They are formed by the projection of 3D objects.
CS 443: Imaging and Multimedia Cameras and Lenses Spring 2008 Ahmed Elgammal Dept of Computer Science Rutgers University Outlines Cameras and lenses! 1 They are formed by the projection of 3D objects.
Cameras. Steve Rotenberg CSE168: Rendering Algorithms UCSD, Spring 2017
 Cameras Steve Rotenberg CSE168: Rendering Algorithms UCSD, Spring 2017 Camera Focus Camera Focus So far, we have been simulating pinhole cameras with perfect focus Often times, we want to simulate more
Cameras Steve Rotenberg CSE168: Rendering Algorithms UCSD, Spring 2017 Camera Focus Camera Focus So far, we have been simulating pinhole cameras with perfect focus Often times, we want to simulate more
ME 6406 MACHINE VISION. Georgia Institute of Technology
 ME 6406 MACHINE VISION Georgia Institute of Technology Class Information Instructor Professor Kok-Meng Lee MARC 474 Office hours: Tues/Thurs 1:00-2:00 pm kokmeng.lee@me.gatech.edu (404)-894-7402 Class
ME 6406 MACHINE VISION Georgia Institute of Technology Class Information Instructor Professor Kok-Meng Lee MARC 474 Office hours: Tues/Thurs 1:00-2:00 pm kokmeng.lee@me.gatech.edu (404)-894-7402 Class
Capturing Light in man and machine
 Capturing Light in man and machine CS194: Image Manipulation & Computational Photography Alexei Efros, UC Berkeley, Fall 2015 Etymology PHOTOGRAPHY light drawing / writing Image Formation Digital Camera
Capturing Light in man and machine CS194: Image Manipulation & Computational Photography Alexei Efros, UC Berkeley, Fall 2015 Etymology PHOTOGRAPHY light drawing / writing Image Formation Digital Camera
Capturing Light in man and machine. Some figures from Steve Seitz, Steve Palmer, Paul Debevec, and Gonzalez et al.
 Capturing Light in man and machine Some figures from Steve Seitz, Steve Palmer, Paul Debevec, and Gonzalez et al. 15-463: Computational Photography Alexei Efros, CMU, Fall 2005 Image Formation Digital
Capturing Light in man and machine Some figures from Steve Seitz, Steve Palmer, Paul Debevec, and Gonzalez et al. 15-463: Computational Photography Alexei Efros, CMU, Fall 2005 Image Formation Digital
Color Image Processing
 Color Image Processing Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Color Used heavily in human vision. Visible spectrum for humans is 400 nm (blue) to 700
Color Image Processing Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Color Used heavily in human vision. Visible spectrum for humans is 400 nm (blue) to 700
Single-view Metrology and Cameras
 Single-view Metrology and Cameras 10/10/17 Computational Photography Derek Hoiem, University of Illinois Project 2 Results Incomplete list of great project pages Haohang Huang: Best presented project;
Single-view Metrology and Cameras 10/10/17 Computational Photography Derek Hoiem, University of Illinois Project 2 Results Incomplete list of great project pages Haohang Huang: Best presented project;
IMAGE SENSOR SOLUTIONS. KAC-96-1/5" Lens Kit. KODAK KAC-96-1/5" Lens Kit. for use with the KODAK CMOS Image Sensors. November 2004 Revision 2
 KODAK for use with the KODAK CMOS Image Sensors November 2004 Revision 2 1.1 Introduction Choosing the right lens is a critical aspect of designing an imaging system. Typically the trade off between image
KODAK for use with the KODAK CMOS Image Sensors November 2004 Revision 2 1.1 Introduction Choosing the right lens is a critical aspect of designing an imaging system. Typically the trade off between image
General Imaging System
 General Imaging System Lecture Slides ME 4060 Machine Vision and Vision-based Control Chapter 5 Image Sensing and Acquisition By Dr. Debao Zhou 1 2 Light, Color, and Electromagnetic Spectrum Penetrate
General Imaging System Lecture Slides ME 4060 Machine Vision and Vision-based Control Chapter 5 Image Sensing and Acquisition By Dr. Debao Zhou 1 2 Light, Color, and Electromagnetic Spectrum Penetrate
Image Processing - Intro. Tamás Szirányi
 Image Processing - Intro Tamás Szirányi The path of light through optics A Brief History of Images 1558 Camera Obscura, Gemma Frisius, 1558 A Brief History of Images 1558 1568 Lens Based Camera Obscura,
Image Processing - Intro Tamás Szirányi The path of light through optics A Brief History of Images 1558 Camera Obscura, Gemma Frisius, 1558 A Brief History of Images 1558 1568 Lens Based Camera Obscura,
Further reading. 1. Visual perception. Restricting the light. Forming an image. Angel, section 1.4
 Further reading Angel, section 1.4 Glassner, Principles of Digital mage Synthesis, sections 1.1-1.6. 1. Visual perception Spencer, Shirley, Zimmerman, and Greenberg. Physically-based glare effects for
Further reading Angel, section 1.4 Glassner, Principles of Digital mage Synthesis, sections 1.1-1.6. 1. Visual perception Spencer, Shirley, Zimmerman, and Greenberg. Physically-based glare effects for
CS559: Computer Graphics. Lecture 2: Image Formation in Eyes and Cameras Li Zhang Spring 2008
 CS559: Computer Graphics Lecture 2: Image Formation in Eyes and Cameras Li Zhang Spring 2008 Today Eyes Cameras Light Why can we see? Visible Light and Beyond Infrared, e.g. radio wave longer wavelength
CS559: Computer Graphics Lecture 2: Image Formation in Eyes and Cameras Li Zhang Spring 2008 Today Eyes Cameras Light Why can we see? Visible Light and Beyond Infrared, e.g. radio wave longer wavelength
Chapter 36. Image Formation
 Chapter 36 Image Formation Notation for Mirrors and Lenses The object distance is the distance from the object to the mirror or lens Denoted by p The image distance is the distance from the image to the
Chapter 36 Image Formation Notation for Mirrors and Lenses The object distance is the distance from the object to the mirror or lens Denoted by p The image distance is the distance from the image to the
Chapter 36. Image Formation
 Chapter 36 Image Formation Image of Formation Images can result when light rays encounter flat or curved surfaces between two media. Images can be formed either by reflection or refraction due to these
Chapter 36 Image Formation Image of Formation Images can result when light rays encounter flat or curved surfaces between two media. Images can be formed either by reflection or refraction due to these
VC 11/12 T2 Image Formation
 VC 11/12 T2 Image Formation Mestrado em Ciência de Computadores Mestrado Integrado em Engenharia de Redes e Sistemas Informáticos Miguel Tavares Coimbra Outline Computer Vision? The Human Visual System
VC 11/12 T2 Image Formation Mestrado em Ciência de Computadores Mestrado Integrado em Engenharia de Redes e Sistemas Informáticos Miguel Tavares Coimbra Outline Computer Vision? The Human Visual System
Reading. 1. Visual perception. Outline. Forming an image. Optional: Glassner, Principles of Digital Image Synthesis, sections
 Reading Optional: Glassner, Principles of Digital mage Synthesis, sections 1.1-1.6. 1. Visual perception Brian Wandell. Foundations of Vision. Sinauer Associates, Sunderland, MA, 1995. Research papers:
Reading Optional: Glassner, Principles of Digital mage Synthesis, sections 1.1-1.6. 1. Visual perception Brian Wandell. Foundations of Vision. Sinauer Associates, Sunderland, MA, 1995. Research papers:
Overview. Image formation - 1
 Overview perspective imaging Image formation Refraction of light Thin-lens equation Optical power and accommodation Image irradiance and scene radiance Digital images Introduction to MATLAB Image formation
Overview perspective imaging Image formation Refraction of light Thin-lens equation Optical power and accommodation Image irradiance and scene radiance Digital images Introduction to MATLAB Image formation
Vision and Color. Reading. Optics, cont d. Lenses. d d f. Brian Curless CSE 557 Autumn Good resources:
 Reading Good resources: Vision and Color Brian Curless CSE 557 Autumn 2015 Glassner, Principles of Digital Image Synthesis, pp. 5-32. Palmer, Vision Science: Photons to Phenomenology. Wandell. Foundations
Reading Good resources: Vision and Color Brian Curless CSE 557 Autumn 2015 Glassner, Principles of Digital Image Synthesis, pp. 5-32. Palmer, Vision Science: Photons to Phenomenology. Wandell. Foundations
Vision and Color. Brian Curless CSE 557 Autumn 2015
 Vision and Color Brian Curless CSE 557 Autumn 2015 1 Reading Good resources: Glassner, Principles of Digital Image Synthesis, pp. 5-32. Palmer, Vision Science: Photons to Phenomenology. Wandell. Foundations
Vision and Color Brian Curless CSE 557 Autumn 2015 1 Reading Good resources: Glassner, Principles of Digital Image Synthesis, pp. 5-32. Palmer, Vision Science: Photons to Phenomenology. Wandell. Foundations
Image Formation and Camera Design
 Image Formation and Camera Design Spring 2003 CMSC 426 Jan Neumann 2/20/03 Light is all around us! From London & Upton, Photography Conventional camera design... Ken Kay, 1969 in Light & Film, TimeLife
Image Formation and Camera Design Spring 2003 CMSC 426 Jan Neumann 2/20/03 Light is all around us! From London & Upton, Photography Conventional camera design... Ken Kay, 1969 in Light & Film, TimeLife
Image Formation and Capture. Acknowledgment: some figures by B. Curless, E. Hecht, W.J. Smith, B.K.P. Horn, and A. Theuwissen
 Image Formation and Capture Acknowledgment: some figures by B. Curless, E. Hecht, W.J. Smith, B.K.P. Horn, and A. Theuwissen Image Formation and Capture Real world Optics Sensor Devices Sources of Error
Image Formation and Capture Acknowledgment: some figures by B. Curless, E. Hecht, W.J. Smith, B.K.P. Horn, and A. Theuwissen Image Formation and Capture Real world Optics Sensor Devices Sources of Error
Vision and Color. Reading. The lensmaker s formula. Lenses. Brian Curless CSEP 557 Autumn Good resources:
 Reading Good resources: Vision and Color Brian Curless CSEP 557 Autumn 2017 Glassner, Principles of Digital Image Synthesis, pp. 5-32. Palmer, Vision Science: Photons to Phenomenology. Wandell. Foundations
Reading Good resources: Vision and Color Brian Curless CSEP 557 Autumn 2017 Glassner, Principles of Digital Image Synthesis, pp. 5-32. Palmer, Vision Science: Photons to Phenomenology. Wandell. Foundations
CS 428: Fall Introduction to. Image formation Color and perception. Andrew Nealen, Rutgers, /8/2010 1
 CS 428: Fall 2010 Introduction to Computer Graphics Image formation Color and perception Andrew Nealen, Rutgers, 2010 9/8/2010 1 Image formation Andrew Nealen, Rutgers, 2010 9/8/2010 2 Image formation
CS 428: Fall 2010 Introduction to Computer Graphics Image formation Color and perception Andrew Nealen, Rutgers, 2010 9/8/2010 1 Image formation Andrew Nealen, Rutgers, 2010 9/8/2010 2 Image formation
Chapter 25 Optical Instruments
 Chapter 25 Optical Instruments Units of Chapter 25 Cameras, Film, and Digital The Human Eye; Corrective Lenses Magnifying Glass Telescopes Compound Microscope Aberrations of Lenses and Mirrors Limits of
Chapter 25 Optical Instruments Units of Chapter 25 Cameras, Film, and Digital The Human Eye; Corrective Lenses Magnifying Glass Telescopes Compound Microscope Aberrations of Lenses and Mirrors Limits of
Lecture 02 Image Formation 1
 Institute of Informatics Institute of Neuroinformatics Lecture 02 Image Formation 1 Davide Scaramuzza http://rpg.ifi.uzh.ch 1 Lab Exercise 1 - Today afternoon Room ETH HG E 1.1 from 13:15 to 15:00 Work
Institute of Informatics Institute of Neuroinformatics Lecture 02 Image Formation 1 Davide Scaramuzza http://rpg.ifi.uzh.ch 1 Lab Exercise 1 - Today afternoon Room ETH HG E 1.1 from 13:15 to 15:00 Work
Lecture 7: Camera Models
 Lecture 7: Camera Models Professor Fei- Fei Li Stanford Vision Lab Lecture 7 -! 1 What we will learn toda? Pinhole cameras Cameras & lenses The geometr of pinhole cameras Reading: [FP] Chapters 1 3 [HZ]
Lecture 7: Camera Models Professor Fei- Fei Li Stanford Vision Lab Lecture 7 -! 1 What we will learn toda? Pinhole cameras Cameras & lenses The geometr of pinhole cameras Reading: [FP] Chapters 1 3 [HZ]
Image Acquisition Hardware. Image Acquisition and Representation. CCD Camera. Camera. how digital images are produced
 Image Acquisition Hardware Image Acquisition and Representation how digital images are produced how digital images are represented photometric models-basic radiometry image noises and noise suppression
Image Acquisition Hardware Image Acquisition and Representation how digital images are produced how digital images are represented photometric models-basic radiometry image noises and noise suppression
Capturing Light in man and machine
 Capturing Light in man and machine CS194: Image Manipulation & Computational Photography Alexei Efros, UC Berkeley, Fall 2014 Etymology PHOTOGRAPHY light drawing / writing Image Formation Digital Camera
Capturing Light in man and machine CS194: Image Manipulation & Computational Photography Alexei Efros, UC Berkeley, Fall 2014 Etymology PHOTOGRAPHY light drawing / writing Image Formation Digital Camera
Lecture 2 Camera Models
 Lecture 2 Camera Models Professor Silvio Savarese Computational Vision and Geometr Lab Silvio Savarese Lecture 2 - -Jan-8 Lecture 2 Camera Models Pinhole cameras Cameras lenses The geometr of pinhole cameras
Lecture 2 Camera Models Professor Silvio Savarese Computational Vision and Geometr Lab Silvio Savarese Lecture 2 - -Jan-8 Lecture 2 Camera Models Pinhole cameras Cameras lenses The geometr of pinhole cameras
Image Acquisition and Representation. Camera. CCD Camera. Image Acquisition Hardware
 Image Acquisition and Representation Camera Slide 1 how digital images are produced how digital images are represented Slide 3 First photograph was due to Niepce of France in 1827. Basic abstraction is
Image Acquisition and Representation Camera Slide 1 how digital images are produced how digital images are represented Slide 3 First photograph was due to Niepce of France in 1827. Basic abstraction is
Image Acquisition and Representation
 Image Acquisition and Representation how digital images are produced how digital images are represented photometric models-basic radiometry image noises and noise suppression methods 1 Image Acquisition
Image Acquisition and Representation how digital images are produced how digital images are represented photometric models-basic radiometry image noises and noise suppression methods 1 Image Acquisition
VC 16/17 TP2 Image Formation
 VC 16/17 TP2 Image Formation Mestrado em Ciência de Computadores Mestrado Integrado em Engenharia de Redes e Sistemas Informáticos Hélder Filipe Pinto de Oliveira Outline Computer Vision? The Human Visual
VC 16/17 TP2 Image Formation Mestrado em Ciência de Computadores Mestrado Integrado em Engenharia de Redes e Sistemas Informáticos Hélder Filipe Pinto de Oliveira Outline Computer Vision? The Human Visual
Vision and Color. Reading. Optics, cont d. Lenses. d d f. Brian Curless CSEP 557 Fall Good resources:
 Reading Good resources: Vision and Color Brian Curless CSEP 557 Fall 2016 Glassner, Principles of Digital Image Synthesis, pp. 5-32. Palmer, Vision Science: Photons to Phenomenology. Wandell. Foundations
Reading Good resources: Vision and Color Brian Curless CSEP 557 Fall 2016 Glassner, Principles of Digital Image Synthesis, pp. 5-32. Palmer, Vision Science: Photons to Phenomenology. Wandell. Foundations
Vision and Color. Brian Curless CSEP 557 Fall 2016
 Vision and Color Brian Curless CSEP 557 Fall 2016 1 Reading Good resources: Glassner, Principles of Digital Image Synthesis, pp. 5-32. Palmer, Vision Science: Photons to Phenomenology. Wandell. Foundations
Vision and Color Brian Curless CSEP 557 Fall 2016 1 Reading Good resources: Glassner, Principles of Digital Image Synthesis, pp. 5-32. Palmer, Vision Science: Photons to Phenomenology. Wandell. Foundations
INTRODUCTION THIN LENSES. Introduction. given by the paraxial refraction equation derived last lecture: Thin lenses (19.1) = 1. Double-lens systems
 = 1. Double-lens systems") Chapter 9 OPTICAL INSTRUMENTS Introduction Thin lenses Double-lens systems Aberrations Camera Human eye Compound microscope Summary INTRODUCTION Knowledge of geometrical optics, diffraction and interference,
Chapter 9 OPTICAL INSTRUMENTS Introduction Thin lenses Double-lens systems Aberrations Camera Human eye Compound microscope Summary INTRODUCTION Knowledge of geometrical optics, diffraction and interference,
Imaging Optics Fundamentals
 Imaging Optics Fundamentals Gregory Hollows Director, Machine Vision Solutions Edmund Optics Why Are We Here? Topics for Discussion Fundamental Parameters of your system Field of View Working Distance
Imaging Optics Fundamentals Gregory Hollows Director, Machine Vision Solutions Edmund Optics Why Are We Here? Topics for Discussion Fundamental Parameters of your system Field of View Working Distance
The eye & corrective lenses
 Phys 102 Lecture 20 The eye & corrective lenses 1 Today we will... Apply concepts from ray optics & lenses Simple optical instruments the camera & the eye Learn about the human eye Accommodation Myopia,
Phys 102 Lecture 20 The eye & corrective lenses 1 Today we will... Apply concepts from ray optics & lenses Simple optical instruments the camera & the eye Learn about the human eye Accommodation Myopia,
MEM: Intro to Robotics. Assignment 3I. Due: Wednesday 10/15 11:59 EST
 MEM: Intro to Robotics Assignment 3I Due: Wednesday 10/15 11:59 EST 1. Basic Optics You are shopping for a new lens for your Canon D30 digital camera and there are lots of lens options at the store. Your
MEM: Intro to Robotics Assignment 3I Due: Wednesday 10/15 11:59 EST 1. Basic Optics You are shopping for a new lens for your Canon D30 digital camera and there are lots of lens options at the store. Your
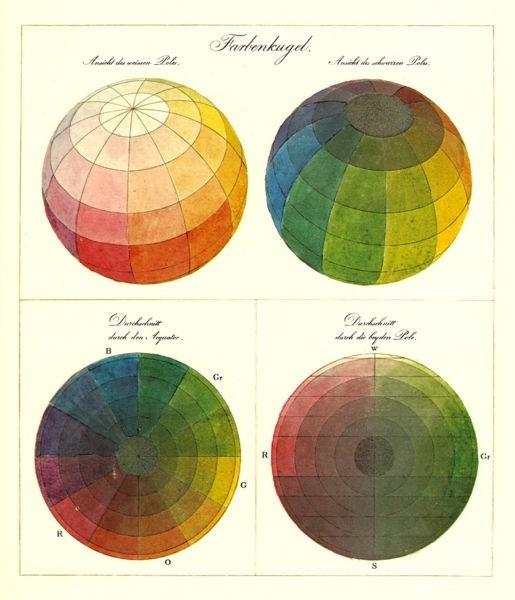
Color. Phillip Otto Runge ( )
") Color Phillip Otto Runge (1777-1810) What is color? Color is a psychological property of our visual experiences when we look at objects and lights, not a physical property of those objects or lights (S.
Color Phillip Otto Runge (1777-1810) What is color? Color is a psychological property of our visual experiences when we look at objects and lights, not a physical property of those objects or lights (S.
ECEN 4606, UNDERGRADUATE OPTICS LAB
 ECEN 4606, UNDERGRADUATE OPTICS LAB Lab 2: Imaging 1 the Telescope Original Version: Prof. McLeod SUMMARY: In this lab you will become familiar with the use of one or more lenses to create images of distant
ECEN 4606, UNDERGRADUATE OPTICS LAB Lab 2: Imaging 1 the Telescope Original Version: Prof. McLeod SUMMARY: In this lab you will become familiar with the use of one or more lenses to create images of distant
VC 14/15 TP2 Image Formation
 VC 14/15 TP2 Image Formation Mestrado em Ciência de Computadores Mestrado Integrado em Engenharia de Redes e Sistemas Informáticos Miguel Tavares Coimbra Outline Computer Vision? The Human Visual System
VC 14/15 TP2 Image Formation Mestrado em Ciência de Computadores Mestrado Integrado em Engenharia de Redes e Sistemas Informáticos Miguel Tavares Coimbra Outline Computer Vision? The Human Visual System
Frequencies and Color
 Frequencies and Color Alexei Efros, CS280, Spring 2018 Salvador Dali Gala Contemplating the Mediterranean Sea, which at 30 meters becomes the portrait of Abraham Lincoln, 1976 Spatial Frequencies and
Frequencies and Color Alexei Efros, CS280, Spring 2018 Salvador Dali Gala Contemplating the Mediterranean Sea, which at 30 meters becomes the portrait of Abraham Lincoln, 1976 Spatial Frequencies and
Lecture Outline Chapter 27. Physics, 4 th Edition James S. Walker. Copyright 2010 Pearson Education, Inc.
 Lecture Outline Chapter 27 Physics, 4 th Edition James S. Walker Chapter 27 Optical Instruments Units of Chapter 27 The Human Eye and the Camera Lenses in Combination and Corrective Optics The Magnifying
Lecture Outline Chapter 27 Physics, 4 th Edition James S. Walker Chapter 27 Optical Instruments Units of Chapter 27 The Human Eye and the Camera Lenses in Combination and Corrective Optics The Magnifying
Astronomy 80 B: Light. Lecture 9: curved mirrors, lenses, aberrations 29 April 2003 Jerry Nelson
 Astronomy 80 B: Light Lecture 9: curved mirrors, lenses, aberrations 29 April 2003 Jerry Nelson Sensitive Countries LLNL field trip 2003 April 29 80B-Light 2 Topics for Today Optical illusion Reflections
Astronomy 80 B: Light Lecture 9: curved mirrors, lenses, aberrations 29 April 2003 Jerry Nelson Sensitive Countries LLNL field trip 2003 April 29 80B-Light 2 Topics for Today Optical illusion Reflections
Today. Color. Color and light. Color and light. Electromagnetic spectrum 2/7/2011. CS376 Lecture 6: Color 1. What is color?
 Color Monday, Feb 7 Prof. UT-Austin Today Measuring color Spectral power distributions Color mixing Color matching experiments Color spaces Uniform color spaces Perception of color Human photoreceptors
Color Monday, Feb 7 Prof. UT-Austin Today Measuring color Spectral power distributions Color mixing Color matching experiments Color spaces Uniform color spaces Perception of color Human photoreceptors
Announcement A total of 5 (five) late days are allowed for projects. Office hours
 late days are allowed for projects. Office hours") Announcement A total of 5 (five) late days are allowed for projects. Office hours Me: 3:50-4:50pm Thursday (or by appointment) Jake: 12:30-1:30PM Monday and Wednesday Image Formation Digital Camera Film
Announcement A total of 5 (five) late days are allowed for projects. Office hours Me: 3:50-4:50pm Thursday (or by appointment) Jake: 12:30-1:30PM Monday and Wednesday Image Formation Digital Camera Film
Motion illusion, rotating snakes
 Motion illusion, rotating snakes Previous classes Computer vision overview Mathematics of pinhole camera Sensors and light Recap: projection X t x K R 1 1 0 0 0 1 33 32 31 23 22 21 13 12 11 0 0 z y x t
Motion illusion, rotating snakes Previous classes Computer vision overview Mathematics of pinhole camera Sensors and light Recap: projection X t x K R 1 1 0 0 0 1 33 32 31 23 22 21 13 12 11 0 0 z y x t
Photographing Long Scenes with Multiviewpoint
 Photographing Long Scenes with Multiviewpoint Panoramas A. Agarwala, M. Agrawala, M. Cohen, D. Salesin, R. Szeliski Presenter: Stacy Hsueh Discussant: VasilyVolkov Motivation Want an image that shows an
Photographing Long Scenes with Multiviewpoint Panoramas A. Agarwala, M. Agrawala, M. Cohen, D. Salesin, R. Szeliski Presenter: Stacy Hsueh Discussant: VasilyVolkov Motivation Want an image that shows an
Oversubscription. Sorry, not fixed yet. We ll let you know as soon as we can.
 Bela Borsodi Bela Borsodi Oversubscription Sorry, not fixed yet. We ll let you know as soon as we can. CS 143 James Hays Continuing his course many materials, courseworks, based from him + previous staff
Bela Borsodi Bela Borsodi Oversubscription Sorry, not fixed yet. We ll let you know as soon as we can. CS 143 James Hays Continuing his course many materials, courseworks, based from him + previous staff
Chapter 18 Optical Elements
 Chapter 18 Optical Elements GOALS When you have mastered the content of this chapter, you will be able to achieve the following goals: Definitions Define each of the following terms and use it in an operational
Chapter 18 Optical Elements GOALS When you have mastered the content of this chapter, you will be able to achieve the following goals: Definitions Define each of the following terms and use it in an operational
Applied Optics. , Physics Department (Room #36-401) , ,
 , ,") Applied Optics Professor, Physics Department (Room #36-401) 2290-0923, 019-539-0923, shsong@hanyang.ac.kr Office Hours Mondays 15:00-16:30, Wednesdays 15:00-16:30 TA (Ph.D. student, Room #36-415) 2290-0921,
Applied Optics Professor, Physics Department (Room #36-401) 2290-0923, 019-539-0923, shsong@hanyang.ac.kr Office Hours Mondays 15:00-16:30, Wednesdays 15:00-16:30 TA (Ph.D. student, Room #36-415) 2290-0921,
Lecture: Color. Juan Carlos Niebles and Ranjay Krishna Stanford AI Lab. Lecture 1 - Stanford University
 Lecture: Color Juan Carlos Niebles and Ranjay Krishna Stanford AI Lab Stanford University Lecture 1 - Overview of Color Physics of color Human encoding of color Color spaces White balancing Stanford University
Lecture: Color Juan Carlos Niebles and Ranjay Krishna Stanford AI Lab Stanford University Lecture 1 - Overview of Color Physics of color Human encoding of color Color spaces White balancing Stanford University
Capturing Light in man and machine
 Capturing Light in man and machine 15-463: Computational Photography Alexei Efros, CMU, Fall 2010 Etymology PHOTOGRAPHY light drawing / writing Image Formation Digital Camera Film The Eye Sensor Array
Capturing Light in man and machine 15-463: Computational Photography Alexei Efros, CMU, Fall 2010 Etymology PHOTOGRAPHY light drawing / writing Image Formation Digital Camera Film The Eye Sensor Array
CSCE 763: Digital Image Processing
 CSCE 763: Digital Image Processing Spring 2018 Yan Tong Department of Computer Science and Engineering University of South Carolina Today s Agenda Welcome Tentative Syllabus Topics covered in the course
CSCE 763: Digital Image Processing Spring 2018 Yan Tong Department of Computer Science and Engineering University of South Carolina Today s Agenda Welcome Tentative Syllabus Topics covered in the course
APPLICATIONS FOR TELECENTRIC LIGHTING
 APPLICATIONS FOR TELECENTRIC LIGHTING Telecentric lenses used in combination with telecentric lighting provide the most accurate results for measurement of object shapes and geometries. They make attributes
APPLICATIONS FOR TELECENTRIC LIGHTING Telecentric lenses used in combination with telecentric lighting provide the most accurate results for measurement of object shapes and geometries. They make attributes
Announcements. Image Formation: Outline. The course. How Cameras Produce Images. Earliest Surviving Photograph. Image Formation and Cameras
 Announcements Image ormation and Cameras CSE 252A Lecture 3 Assignment 0: Getting Started with Matlab is posted to web page, due Tuesday, ctober 4. Reading: Szeliski, Chapter 2 ptional Chapters 1 & 2 of
Announcements Image ormation and Cameras CSE 252A Lecture 3 Assignment 0: Getting Started with Matlab is posted to web page, due Tuesday, ctober 4. Reading: Szeliski, Chapter 2 ptional Chapters 1 & 2 of
Visual Perception. Readings and References. Forming an image. Pinhole camera. Readings. Other References. CSE 457, Autumn 2004 Computer Graphics
 Readings and References Visual Perception CSE 457, Autumn Computer Graphics Readings Sections 1.4-1.5, Interactive Computer Graphics, Angel Other References Foundations of Vision, Brian Wandell, pp. 45-50
Readings and References Visual Perception CSE 457, Autumn Computer Graphics Readings Sections 1.4-1.5, Interactive Computer Graphics, Angel Other References Foundations of Vision, Brian Wandell, pp. 45-50
Cameras, lenses and sensors
 Cameras, lenses and sensors Marc Pollefeys COMP 256 Cameras, lenses and sensors Camera Models Pinhole Perspective Projection Affine Projection Camera with Lenses Sensing The Human Eye Reading: Chapter.
Cameras, lenses and sensors Marc Pollefeys COMP 256 Cameras, lenses and sensors Camera Models Pinhole Perspective Projection Affine Projection Camera with Lenses Sensing The Human Eye Reading: Chapter.
Homogeneous Representation Representation of points & vectors. Properties. Homogeneous Transformations
 From Last Class Homogeneous Transformations Combines Rotation + Translation into one single matri multiplication Composition of Homogeneous Transformations Homogeneous Representation Representation of
From Last Class Homogeneous Transformations Combines Rotation + Translation into one single matri multiplication Composition of Homogeneous Transformations Homogeneous Representation Representation of