Haptic interaction. Ruth Aylett
|
|
|
- Peregrine Ross
- 5 years ago
- Views:
Transcription
1 Haptic interaction Ruth Aylett
2 Contents Haptic definition Haptic model Haptic devices Measuring forces
3 Haptic Technologies Haptics refers to manual interactions with environments, such as sensorial exploration of information about the environment Srinivasan, M., Basdogan, M. Haptic: adjective technical; of or relating to the sense of touch, in particular relating to the perception and manipulation of objects using the senses of touch and proprioception ORIGIN late 19th cent.: from Greek haptikos 'able to touch or grasp', from haptein 'fasten'.


 Tactile")
4 Machine Haptics: Types of Haptic Devices Force feedback Displays (Kinesthetic: position) Tactile Displays (skin)
5 Haptic interaction Making use of force and movement To convey force To convey movement of objects To convey realism of objects: Give them physical rigidity To give them surface properties Give them resistance Give them weight

6 Humans and machines Human and machine sensorimotor loops Srinivasan, M., Basdogan, M.

7 Integration of Vision and Touch Motor Torques Haptic Thread ~1 khz Encoder Positions Shared Database Visual Thread Images ~ 30 Hz Haptic Interface DISPLAY FORCE STATE Geometry Color Stiffness Deformability DISPLAY VISUALS Visual Interface STATE HUMAN OPERATOR

8 Haptic Rendering with a Force Display virtual wall Position Orientation Collision Detection Object Database Geometry Contact Information F = stiffness * dist Force Collision Response Material
9 point-object interaction HIP = Haptic Interface Point: True (real world) position of stylus tip Hand: always drawn outside the sphere void calculate_force (Vector &force) { float X, Y, Z, distance; float R = 20.0; distance HIP F Hand X = HIP[0]; Y = HIP[1]; Z = HIP[2]; distance = sqrt(x*x + Y*Y + Z*Z); R if(distance < R) //collision check { force[0] = X/distance * (R-distance); force[1] = Y/distance * (R-distance); force[2] = Z/distance * (R-distance); } } Assumption: Stiffness = 1.0
10 Haptic Rendering of 3D Objects via Proxy (point-object interaction) d: Proxy to Tip distance F = k * d (Hooke s Law) HIP (stylus tip: actual position!) Spring with stiffness k Proxy (displayed position) (If in doubt: the visual sense will override the sense of touch )
11 Haptic Rendering of Polygonal Surfaces HIP t-1 HIP t-2 HIP t-3 IHIP t IHIP t+1 HIP = actual tip position IHIP = Proxy point IHIP t+2 v 2 v 1 d d v 3 HIP t HIP t+1 HIP t+2
12 Haptic Display of Surface Details Haptic smoothing of object surfaces (similar to Phong shading) Rendering of haptic textures Haptic rendering of surfaces with friction Direction of movement F user F t F n actual shape displayed shape F f



13 Haptic Texturing image-based s two-stage mapping Bier & Sloan, 1986 t procedural h(x,y,z) bump mapping Blinn, 1978; Max and Becker, 1994
14 Haptic Interface Haptic Interface Characteristics Tracking the user position velocity Display haptic feedback force roughness temperature
15 Haptic Components Human and haptic system components Mechanical Sensory Motor Cognitive Haptic interfaces Computer haptics
16 Haptics Classification By location: Ground based Body based Hybrid systems By output technology: Force feedback devices Tactile feedback devices Shape forming devices
17 Force Feedback Requirements Low back-drive inertia and friction No constraints in motion imposed by drive kinematics (free motion) - should not be able to push through solid objects - avoid unintended vibrations through low servo rates - fast, high resolution responses are required Range, resolution, bandwidth Ergonomics and comfort Must be safe Discomfort or pain are wreckers
18 Technologies Motor driven Electromagnetic Hydraulic Enormously powerful Gyroscopic Good for impacts
19 Motor characteristics Stepper motors Less powerful Digital device: Easy to control Moving Coil Motors Much more powerful Analogue device Much harder to control Needs precise feedback from sensors.
20 Force Feedback Essentially robot arm technology Where joint motors used to give force feedback Derived from telerobotics Compliant effectors Issues: Working volume Just how much force can be fed back Haptic resolution


21 Force Feedback Devices The Phantom Six degrees of freedom Precision positioning input High fidelity force feedback
22 Phantom characteristics Provides a tool to touch objects Provides a tool to touch objects pen-like tool Tip shape definable Very precise control Resolution at the tip ~0.02mm (in 3DOF) Resolution permits detection of surface qualities in the scene (roughness) Requires very high update rate (~1KHz)
23 What it s good for Suitable for simulating: Pen/Paintbrush Probe Medical instruments Not suitable for: Heavy objects Can t deliver enough force Can t press in the correct way Could remove pen and use dummy object

24 Force Feedback Devices The Phantom FreeForm Modelling System Reduces the learning curve Offers unlimited expression May speed up development Still looking at a projected 2D image



25 Force Feedback Devices Surgical Simulation and Training Carnegie-Mellon University, MIT Use of force-feedback to interact with volumetric object models Modeling interactive deformation and cutting of soft tissues using Volume Graphics Real-time volume rendering techniques

26 Virtual surgery Drilling in human bone Application developed by Melerit AB Must work quickly Doctor (and patient) gets X- ray dose while they work Must work accurately Mistakes can make the situation worse Off-line training very beneficial
27 Bone-drilling Use the actual bone drill Weight is right Behaviour is correct Replace the pen grip on the Phantom Attach by the drill bit Simulate bone and drilling with haptics Rigidity Surface qualities Locking effect of the bone on drill


28 Force Feedback Devices Haptic Master: Nissho Electronics Desktop device Six degrees of freedom Displays hardness, elasticity and flow Small working volume 2.5 Kg maximum load Lack of back drivability (reduction of friction)


29 Force Feedback Devices Haptic Master Interface for Fingertips


30 Force Feedback Devices MagLev Wrist: Carnegie Mellon University Uses magnetic levitation technology Lorentz forces used to levitate & control the body
31 Force Feedback Devices Rutgers Master II: Rutgers University Used in VR & telerobotics Reads hand gestures Displays forces to four figures in real time


32 Force Feedback Devices Master Arm Four revolute joints Tracks shoulder elbow motions Pneumatic system Attached to the operator s chair



33 Force Feedback Devices CyberImpact The DDOF, a three degree of freedom force feedback device The 6DOF, which was developed for NASA for use in the space station It is a six degree of freedom force feedback input/output device. The SPACEPEN that was created for use in conceptual design and design evaluation
34 Exoskeletons Put robot components around human ones Obvious safety issues Cybergrasp force-reflecting exoskeleton: fits over CyberGlove adding resistive force feedback to each finger. network of tendons routed to the fingertips via the exoskeleton Five actuators, individually programmed Grasp forces are roughly perpendicular to the fingertips




35 Tactile Feedback Devices Cybergrasp Impulse Engine DOF Haptic Interface Laparoscopic University of Colorado Impulse Engine




36 Tactile Feedback Devices Eye Surgery Simulator: Medical College, Georgia Real-time "feel" of tooltissue interaction Tactile recording facility


37 Tactile Feedback Devices Utah-MIT Dextrus Arm Teleoperation: Sarcos Master Sensuit
38 Tactile Feedback Devices Stimulation Delivery Methods Pneumatic Vibro-tactile Electro-tactile Functional neuro-mascular

39 Tactile Feedback Devices Actuator Pin Display: Forschungszentrum Karlsruhe Actuator Pin Display Spring force Fmax > 2.5 N Maximum pin travel 3.5 mm Pins can stop at any position
40 Tactile Feedback Devices Actuator Pin Display: VR Thermal Kit Hot or cold stimuli Temperature differential up to 600 K Constructed of Peltier cooling blocks


41 Shape Forming Devices Haptic Screen: Tsukuba University Shape forming device Variable surface hardiness Difficult to simulate virtual objects Very application specific


42 Shape Forming Devices Elastic Force Sensor: Tsukuba University Force reading device Force magnitude dictates the level of deformation Very application specific Difficult to simulate virtual objects
43 Using vibration FakeSpace Cybertouch Employs vibration to tell the user that their finger has reached a surface Technology from mobile phones ( silent mode) Information about the surface Quite limited but usable
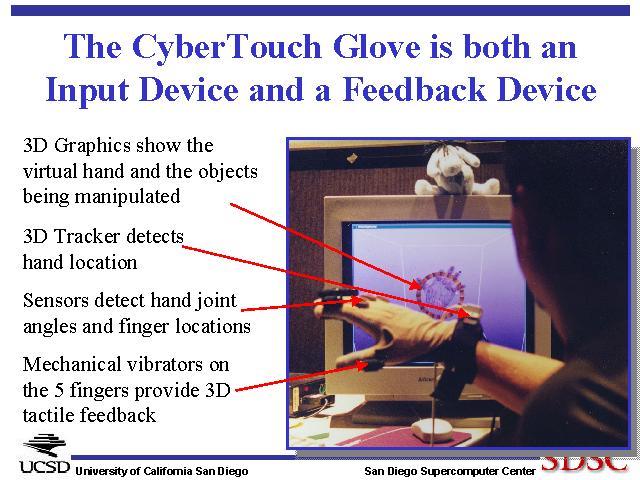
44 CyberTouch

45 Virtual Chanbara SIGGRAPH 2002 Virtual samuri fighting Gyroscope used to give sensation of impact
46 Haptic navigation Large device directing movement by pressure on two hands See
47 Used for haptic feedback Weight Motion (inertia) Moments of inertia Impact Deformable objects Surface haptics Surface properties Volume haptics Volume Properties

48 Modelling weight Vertical force Derived from mass of object Produces complex set of forces
49 Modelling weight - 2 Simple force leads to complex derived forces Determined by the object Mass: inertia Mass distribution: moments of inertia Determined by nature of the handle The way in which it is attached Getting it wrong affects realism People know how it should feel!
50 Linear motion User applies a force to an object: It accelerates away from point of contact Determined by mass User feels a force When the user stops pushing: Object decelerates? Due to friction? Perhaps modelled with a spring damper User feels a force
51 Angular motion Object has a moment of inertia about any axis Force produces rotation about an axis Angular acceleration: (force x distance) / moment of inertia
52 Force measurement Haptic devices often have no means to measure force! Technology exists but is hard to use Device measures distance moved Force applied to user s probe accordingly Proxy object: Virtual object holding position on the surface of the object The proxy is the rendered object
53 Measuring force Model with spring Force proportional to movement Typically very small movement
54 Impacts Moving object in collision: Imparts momentum to other object Begins to push user s probe away Imparts an impulse to other object Fast moving objects in particular Elastic and inelastic collisions Hard to do with phantom equipment Insufficient force, delivered too slowly Specialist kit often used - as in virtual chanbara Impact only, not FF
55 Surface properties Whole area of research: Surface haptics Looking at ways to model Surface roughness Surface friction on general (not flat) surfaces
56 Rendering and surface haptics Surfaces of objects are sometimes flat Easy to render these General surfaces are not flat Well established models to render these Gouraud and and Phong shading models Make them look smooth Want same effect in surface haptics
57 Real surfaces Surfaces in scene are rarely simple: Most are irregular All are composed of polygons None is smooth How do we model surface interaction? Use: a proxy: a virtual object reporting real surface and force shading rules
58 Using the proxy Proxy moves on polygon surface Computes surface properties Adds fictional forces to physical tip Physical tip feels interpolated normal Interpolated like phong shading model
59 Cheap haptics Mobile phone vibrate Multi-touch table Haptic pen

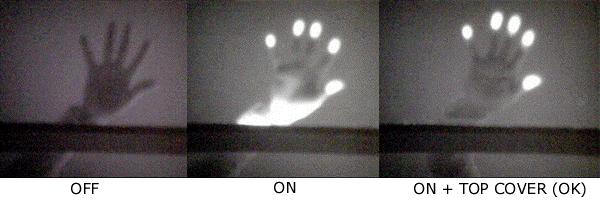
60 Multi-touch table Not all touch-surfaces are haptic But some are Use of Frustrated Total Internal Reflection
61 Use of soft surface Pressure produces blobs of light underneath Blob size related to pressure Back-mounted camera to pick this up Back projection up onto the surface Self-build for some 00s of pounds See Also
62

63 The complete table
64 Haptic pen Use concept of spring-loaded biro
Haptic interaction. Ruth Aylett
 Haptic interaction Ruth Aylett Contents Haptic definition Haptic model Haptic devices Measuring forces Haptic Technologies Haptics refers to manual interactions with environments, such as sensorial exploration
Haptic interaction Ruth Aylett Contents Haptic definition Haptic model Haptic devices Measuring forces Haptic Technologies Haptics refers to manual interactions with environments, such as sensorial exploration
Computer Haptics and Applications
 Computer Haptics and Applications EURON Summer School 2003 Cagatay Basdogan, Ph.D. College of Engineering Koc University, Istanbul, 80910 (http://network.ku.edu.tr/~cbasdogan) Resources: EURON Summer School
Computer Haptics and Applications EURON Summer School 2003 Cagatay Basdogan, Ph.D. College of Engineering Koc University, Istanbul, 80910 (http://network.ku.edu.tr/~cbasdogan) Resources: EURON Summer School
FORCE FEEDBACK. Roope Raisamo
 FORCE FEEDBACK Roope Raisamo Multimodal Interaction Research Group Tampere Unit for Computer Human Interaction Department of Computer Sciences University of Tampere, Finland Outline Force feedback interfaces
FORCE FEEDBACK Roope Raisamo Multimodal Interaction Research Group Tampere Unit for Computer Human Interaction Department of Computer Sciences University of Tampere, Finland Outline Force feedback interfaces
Peter Berkelman. ACHI/DigitalWorld
 Magnetic Levitation Haptic Peter Berkelman ACHI/DigitalWorld February 25, 2013 Outline: Haptics - Force Feedback Sample devices: Phantoms, Novint Falcon, Force Dimension Inertia, friction, hysteresis/backlash
Magnetic Levitation Haptic Peter Berkelman ACHI/DigitalWorld February 25, 2013 Outline: Haptics - Force Feedback Sample devices: Phantoms, Novint Falcon, Force Dimension Inertia, friction, hysteresis/backlash
PROPRIOCEPTION AND FORCE FEEDBACK
 PROPRIOCEPTION AND FORCE FEEDBACK Roope Raisamo and Jukka Raisamo Multimodal Interaction Research Group Tampere Unit for Computer Human Interaction Department of Computer Sciences University of Tampere,
PROPRIOCEPTION AND FORCE FEEDBACK Roope Raisamo and Jukka Raisamo Multimodal Interaction Research Group Tampere Unit for Computer Human Interaction Department of Computer Sciences University of Tampere,
Proprioception & force sensing
 Proprioception & force sensing Roope Raisamo Tampere Unit for Computer-Human Interaction (TAUCHI) School of Information Sciences University of Tampere, Finland Based on material by Jussi Rantala, Jukka
Proprioception & force sensing Roope Raisamo Tampere Unit for Computer-Human Interaction (TAUCHI) School of Information Sciences University of Tampere, Finland Based on material by Jussi Rantala, Jukka
Force feedback interfaces & applications
 Force feedback interfaces & applications Roope Raisamo Tampere Unit for Computer-Human Interaction (TAUCHI) School of Information Sciences University of Tampere, Finland Based on material by Jukka Raisamo,
Force feedback interfaces & applications Roope Raisamo Tampere Unit for Computer-Human Interaction (TAUCHI) School of Information Sciences University of Tampere, Finland Based on material by Jukka Raisamo,
Chapter 2 Introduction to Haptics 2.1 Definition of Haptics
 Chapter 2 Introduction to Haptics 2.1 Definition of Haptics The word haptic originates from the Greek verb hapto to touch and therefore refers to the ability to touch and manipulate objects. The haptic
Chapter 2 Introduction to Haptics 2.1 Definition of Haptics The word haptic originates from the Greek verb hapto to touch and therefore refers to the ability to touch and manipulate objects. The haptic
¾ B-TECH (IT) ¾ B-TECH (IT)
 ¾ B-TECH (IT)") HAPTIC TECHNOLOGY V.R.Siddhartha Engineering College Vijayawada. Presented by Sudheer Kumar.S CH.Sreekanth ¾ B-TECH (IT) ¾ B-TECH (IT) Email:samudralasudheer@yahoo.com Email:shri_136@yahoo.co.in Introduction
HAPTIC TECHNOLOGY V.R.Siddhartha Engineering College Vijayawada. Presented by Sudheer Kumar.S CH.Sreekanth ¾ B-TECH (IT) ¾ B-TECH (IT) Email:samudralasudheer@yahoo.com Email:shri_136@yahoo.co.in Introduction
2. Introduction to Computer Haptics
 2. Introduction to Computer Haptics Seungmoon Choi, Ph.D. Assistant Professor Dept. of Computer Science and Engineering POSTECH Outline Basics of Force-Feedback Haptic Interfaces Introduction to Computer
2. Introduction to Computer Haptics Seungmoon Choi, Ph.D. Assistant Professor Dept. of Computer Science and Engineering POSTECH Outline Basics of Force-Feedback Haptic Interfaces Introduction to Computer
Aural and Haptic Displays
 Teil 5: Aural and Haptic Displays Virtuelle Realität Wintersemester 2007/08 Prof. Bernhard Jung Overview Aural Displays Haptic Displays Further information: The Haptics Community Web Site: http://haptic.mech.northwestern.edu/
Teil 5: Aural and Haptic Displays Virtuelle Realität Wintersemester 2007/08 Prof. Bernhard Jung Overview Aural Displays Haptic Displays Further information: The Haptics Community Web Site: http://haptic.mech.northwestern.edu/
Elements of Haptic Interfaces
 Elements of Haptic Interfaces Katherine J. Kuchenbecker Department of Mechanical Engineering and Applied Mechanics University of Pennsylvania kuchenbe@seas.upenn.edu Course Notes for MEAM 625, University
Elements of Haptic Interfaces Katherine J. Kuchenbecker Department of Mechanical Engineering and Applied Mechanics University of Pennsylvania kuchenbe@seas.upenn.edu Course Notes for MEAM 625, University
Haptics CS327A
 Haptics CS327A - 217 hap tic adjective relating to the sense of touch or to the perception and manipulation of objects using the senses of touch and proprioception 1 2 Slave Master 3 Courtesy of Walischmiller
Haptics CS327A - 217 hap tic adjective relating to the sense of touch or to the perception and manipulation of objects using the senses of touch and proprioception 1 2 Slave Master 3 Courtesy of Walischmiller
Evaluation of Five-finger Haptic Communication with Network Delay
 Tactile Communication Haptic Communication Network Delay Evaluation of Five-finger Haptic Communication with Network Delay To realize tactile communication, we clarify some issues regarding how delay affects
Tactile Communication Haptic Communication Network Delay Evaluation of Five-finger Haptic Communication with Network Delay To realize tactile communication, we clarify some issues regarding how delay affects
ACTUATORS AND SENSORS. Joint actuating system. Servomotors. Sensors
 ACTUATORS AND SENSORS Joint actuating system Servomotors Sensors JOINT ACTUATING SYSTEM Transmissions Joint motion low speeds high torques Spur gears change axis of rotation and/or translate application
ACTUATORS AND SENSORS Joint actuating system Servomotors Sensors JOINT ACTUATING SYSTEM Transmissions Joint motion low speeds high torques Spur gears change axis of rotation and/or translate application
Haptic, vestibular and other physical input/output devices
 Human Touch Sensing - recap Haptic, vestibular and other physical input/output devices SGN-5406 Virtual Reality Autumn 2007 ismo.rakkolainen@tut.fi The human sensitive areas for touch: Hand, face Many
Human Touch Sensing - recap Haptic, vestibular and other physical input/output devices SGN-5406 Virtual Reality Autumn 2007 ismo.rakkolainen@tut.fi The human sensitive areas for touch: Hand, face Many
Invited Chapter in Automation, Miniature Robotics and Sensors for Non-Destructive Testing and Evaluation, Y. Bar-Cohen Editor, April 99
 10.2 HAPTIC INTERFACES Yoseph Bar-Cohen Jet Propulsion Laboratory, Caltech, 4800 Oak Grove Dr., Pasadena, CA 90740 818-354-2610, fax 818-393-4057, yosi@jpl.nasa.gov Constantinos Mavroidis, and Charles
10.2 HAPTIC INTERFACES Yoseph Bar-Cohen Jet Propulsion Laboratory, Caltech, 4800 Oak Grove Dr., Pasadena, CA 90740 818-354-2610, fax 818-393-4057, yosi@jpl.nasa.gov Constantinos Mavroidis, and Charles
HAPTIC DEVICES FOR DESKTOP VIRTUAL PROTOTYPING APPLICATIONS
 The 3rd International Conference on Computational Mechanics and Virtual Engineering COMEC 2009 29 30 OCTOBER 2009, Brasov, Romania HAPTIC DEVICES FOR DESKTOP VIRTUAL PROTOTYPING APPLICATIONS A. Fratu 1,
The 3rd International Conference on Computational Mechanics and Virtual Engineering COMEC 2009 29 30 OCTOBER 2009, Brasov, Romania HAPTIC DEVICES FOR DESKTOP VIRTUAL PROTOTYPING APPLICATIONS A. Fratu 1,
Overview of current developments in haptic APIs
 Central European Seminar on Computer Graphics for students, 2011 AUTHOR: Petr Kadleček SUPERVISOR: Petr Kmoch Overview of current developments in haptic APIs Presentation Haptics Haptic programming Haptic
Central European Seminar on Computer Graphics for students, 2011 AUTHOR: Petr Kadleček SUPERVISOR: Petr Kmoch Overview of current developments in haptic APIs Presentation Haptics Haptic programming Haptic
Touch & Haptics. Touch & High Information Transfer Rate. Modern Haptics. Human. Haptics
 Touch & Haptics Touch & High Information Transfer Rate Blind and deaf people have been using touch to substitute vision or hearing for a very long time, and successfully. OPTACON Hong Z Tan Purdue University
Touch & Haptics Touch & High Information Transfer Rate Blind and deaf people have been using touch to substitute vision or hearing for a very long time, and successfully. OPTACON Hong Z Tan Purdue University
Chapter 1 Introduction to Robotics
 Chapter 1 Introduction to Robotics PS: Most of the pages of this presentation were obtained and adapted from various sources in the internet. 1 I. Definition of Robotics Definition (Robot Institute of
Chapter 1 Introduction to Robotics PS: Most of the pages of this presentation were obtained and adapted from various sources in the internet. 1 I. Definition of Robotics Definition (Robot Institute of
Haptics and the User Interface
 Haptics and the User Interface based on slides from Karon MacLean, original slides available at: http://www.cs.ubc.ca/~maclean/publics/ what is haptic? from Greek haptesthai : to touch Haptic User Interfaces
Haptics and the User Interface based on slides from Karon MacLean, original slides available at: http://www.cs.ubc.ca/~maclean/publics/ what is haptic? from Greek haptesthai : to touch Haptic User Interfaces
Technologies. Philippe Fuchs Ecole des Mines, ParisTech, Paris, France. Virtual Reality: Concepts and. Guillaume Moreau.
 Virtual Reality: Concepts and Technologies Editors Philippe Fuchs Ecole des Mines, ParisTech, Paris, France Guillaume Moreau Ecole Centrale de Nantes, CERMA, Nantes, France Pascal Guitton INRIA, University
Virtual Reality: Concepts and Technologies Editors Philippe Fuchs Ecole des Mines, ParisTech, Paris, France Guillaume Moreau Ecole Centrale de Nantes, CERMA, Nantes, France Pascal Guitton INRIA, University
Phantom-Based Haptic Interaction
 Phantom-Based Haptic Interaction Aimee Potts University of Minnesota, Morris 801 Nevada Ave. Apt. 7 Morris, MN 56267 (320) 589-0170 pottsal@cda.mrs.umn.edu ABSTRACT Haptic interaction is a new field of
Phantom-Based Haptic Interaction Aimee Potts University of Minnesota, Morris 801 Nevada Ave. Apt. 7 Morris, MN 56267 (320) 589-0170 pottsal@cda.mrs.umn.edu ABSTRACT Haptic interaction is a new field of
Methods for Haptic Feedback in Teleoperated Robotic Surgery
 Young Group 5 1 Methods for Haptic Feedback in Teleoperated Robotic Surgery Paper Review Jessie Young Group 5: Haptic Interface for Surgical Manipulator System March 12, 2012 Paper Selection: A. M. Okamura.
Young Group 5 1 Methods for Haptic Feedback in Teleoperated Robotic Surgery Paper Review Jessie Young Group 5: Haptic Interface for Surgical Manipulator System March 12, 2012 Paper Selection: A. M. Okamura.
Shape Memory Alloy Actuator Controller Design for Tactile Displays
 34th IEEE Conference on Decision and Control New Orleans, Dec. 3-5, 995 Shape Memory Alloy Actuator Controller Design for Tactile Displays Robert D. Howe, Dimitrios A. Kontarinis, and William J. Peine
34th IEEE Conference on Decision and Control New Orleans, Dec. 3-5, 995 Shape Memory Alloy Actuator Controller Design for Tactile Displays Robert D. Howe, Dimitrios A. Kontarinis, and William J. Peine
DESIGN OF A 2-FINGER HAND EXOSKELETON FOR VR GRASPING SIMULATION
 DESIGN OF A 2-FINGER HAND EXOSKELETON FOR VR GRASPING SIMULATION Panagiotis Stergiopoulos Philippe Fuchs Claude Laurgeau Robotics Center-Ecole des Mines de Paris 60 bd St-Michel, 75272 Paris Cedex 06,
DESIGN OF A 2-FINGER HAND EXOSKELETON FOR VR GRASPING SIMULATION Panagiotis Stergiopoulos Philippe Fuchs Claude Laurgeau Robotics Center-Ecole des Mines de Paris 60 bd St-Michel, 75272 Paris Cedex 06,
Modeling and Experimental Studies of a Novel 6DOF Haptic Device
 Proceedings of The Canadian Society for Mechanical Engineering Forum 2010 CSME FORUM 2010 June 7-9, 2010, Victoria, British Columbia, Canada Modeling and Experimental Studies of a Novel DOF Haptic Device
Proceedings of The Canadian Society for Mechanical Engineering Forum 2010 CSME FORUM 2010 June 7-9, 2010, Victoria, British Columbia, Canada Modeling and Experimental Studies of a Novel DOF Haptic Device
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute Use an example to explain what is admittance control? You may refer to exoskeleton
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute Use an example to explain what is admittance control? You may refer to exoskeleton
Haplug: A Haptic Plug for Dynamic VR Interactions
 Haplug: A Haptic Plug for Dynamic VR Interactions Nobuhisa Hanamitsu *, Ali Israr Disney Research, USA nobuhisa.hanamitsu@disneyresearch.com Abstract. We demonstrate applications of a new actuator, the
Haplug: A Haptic Plug for Dynamic VR Interactions Nobuhisa Hanamitsu *, Ali Israr Disney Research, USA nobuhisa.hanamitsu@disneyresearch.com Abstract. We demonstrate applications of a new actuator, the
TEACHING HAPTIC RENDERING SONNY CHAN, STANFORD UNIVERSITY
 TEACHING HAPTIC RENDERING SONNY CHAN, STANFORD UNIVERSITY MARCH 4, 2012 HAPTICS SYMPOSIUM Overview A brief introduction to CS 277 @ Stanford Core topics in haptic rendering Use of the CHAI3D framework
TEACHING HAPTIC RENDERING SONNY CHAN, STANFORD UNIVERSITY MARCH 4, 2012 HAPTICS SYMPOSIUM Overview A brief introduction to CS 277 @ Stanford Core topics in haptic rendering Use of the CHAI3D framework
Output Devices - Non-Visual
 IMGD 5100: Immersive HCI Output Devices - Non-Visual Robert W. Lindeman Associate Professor Department of Computer Science Worcester Polytechnic Institute gogo@wpi.edu Overview Here we are concerned with
IMGD 5100: Immersive HCI Output Devices - Non-Visual Robert W. Lindeman Associate Professor Department of Computer Science Worcester Polytechnic Institute gogo@wpi.edu Overview Here we are concerned with
Feeding human senses through Immersion
 Virtual Reality Feeding human senses through Immersion 1. How many human senses? 2. Overview of key human senses 3. Sensory stimulation through Immersion 4. Conclusion Th3.1 1. How many human senses? [TRV
Virtual Reality Feeding human senses through Immersion 1. How many human senses? 2. Overview of key human senses 3. Sensory stimulation through Immersion 4. Conclusion Th3.1 1. How many human senses? [TRV
Experimental Evaluation of Haptic Control for Human Activated Command Devices
 Experimental Evaluation of Haptic Control for Human Activated Command Devices Andrew Zammit Mangion Simon G. Fabri Faculty of Engineering, University of Malta, Msida, MSD 2080, Malta Tel: +356 (7906)1312;
Experimental Evaluation of Haptic Control for Human Activated Command Devices Andrew Zammit Mangion Simon G. Fabri Faculty of Engineering, University of Malta, Msida, MSD 2080, Malta Tel: +356 (7906)1312;
CS277 - Experimental Haptics Lecture 1. Introduction to Haptics
 CS277 - Experimental Haptics Lecture 1 Introduction to Haptics Haptic Interfaces Enables physical interaction with virtual objects Haptic Rendering Potential Fields Polygonal Meshes Implicit Surfaces Volumetric
CS277 - Experimental Haptics Lecture 1 Introduction to Haptics Haptic Interfaces Enables physical interaction with virtual objects Haptic Rendering Potential Fields Polygonal Meshes Implicit Surfaces Volumetric
Cutaneous Feedback of Fingertip Deformation and Vibration for Palpation in Robotic Surgery
 Cutaneous Feedback of Fingertip Deformation and Vibration for Palpation in Robotic Surgery Claudio Pacchierotti Domenico Prattichizzo Katherine J. Kuchenbecker Motivation Despite its expected clinical
Cutaneous Feedback of Fingertip Deformation and Vibration for Palpation in Robotic Surgery Claudio Pacchierotti Domenico Prattichizzo Katherine J. Kuchenbecker Motivation Despite its expected clinical
Tool-Based Haptic Interaction with Dynamic Physical Simulations using Lorentz Magnetic Levitation. Outline:
 Tool-Based Haptic Interaction with Dynamic Physical Simulations using Lorentz Magnetic Levitation Peter Berkelman Johns Hopkins University January 2000 1 Outline: Introduction: haptic interaction background,
Tool-Based Haptic Interaction with Dynamic Physical Simulations using Lorentz Magnetic Levitation Peter Berkelman Johns Hopkins University January 2000 1 Outline: Introduction: haptic interaction background,
Technical Cognitive Systems
 Part XII Actuators 3 Outline Robot Bases Hardware Components Robot Arms 4 Outline Robot Bases Hardware Components Robot Arms 5 (Wheeled) Locomotion Goal: Bring the robot to a desired pose (x, y, θ): (position
Part XII Actuators 3 Outline Robot Bases Hardware Components Robot Arms 4 Outline Robot Bases Hardware Components Robot Arms 5 (Wheeled) Locomotion Goal: Bring the robot to a desired pose (x, y, θ): (position
Berkshire Encyclopedia of Human-Computer Interaction, W. Bainbridge, Ed., Berkshire Publishing Group, 2004, pp Haptics
 Berkshire Encyclopedia of Human-Computer Interaction, W. Bainbridge, Ed., Berkshire Publishing Group, 2004, pp. 311-316. Haptics Ralph Hollis Carnegie Mellon University Haptic interaction with the world
Berkshire Encyclopedia of Human-Computer Interaction, W. Bainbridge, Ed., Berkshire Publishing Group, 2004, pp. 311-316. Haptics Ralph Hollis Carnegie Mellon University Haptic interaction with the world
Computer Assisted Medical Interventions
 Outline Computer Assisted Medical Interventions Force control, collaborative manipulation and telemanipulation Bernard BAYLE Joint course University of Strasbourg, University of Houston, Telecom Paris
Outline Computer Assisted Medical Interventions Force control, collaborative manipulation and telemanipulation Bernard BAYLE Joint course University of Strasbourg, University of Houston, Telecom Paris
Lecture 1: Introduction to haptics and Kinesthetic haptic devices
 ME 327: Design and Control of Haptic Systems Winter 2018 Lecture 1: Introduction to haptics and Kinesthetic haptic devices Allison M. Okamura Stanford University today s objectives introduce you to the
ME 327: Design and Control of Haptic Systems Winter 2018 Lecture 1: Introduction to haptics and Kinesthetic haptic devices Allison M. Okamura Stanford University today s objectives introduce you to the
Beyond Visual: Shape, Haptics and Actuation in 3D UI
 Beyond Visual: Shape, Haptics and Actuation in 3D UI Ivan Poupyrev Welcome, Introduction, & Roadmap 3D UIs 101 3D UIs 201 User Studies and 3D UIs Guidelines for Developing 3D UIs Video Games: 3D UIs for
Beyond Visual: Shape, Haptics and Actuation in 3D UI Ivan Poupyrev Welcome, Introduction, & Roadmap 3D UIs 101 3D UIs 201 User Studies and 3D UIs Guidelines for Developing 3D UIs Video Games: 3D UIs for
Touching and Walking: Issues in Haptic Interface
 Touching and Walking: Issues in Haptic Interface Hiroo Iwata 1 1 Institute of Engineering Mechanics and Systems, University of Tsukuba, 80, Tsukuba, 305-8573 Japan iwata@kz.tsukuba.ac.jp Abstract. This
Touching and Walking: Issues in Haptic Interface Hiroo Iwata 1 1 Institute of Engineering Mechanics and Systems, University of Tsukuba, 80, Tsukuba, 305-8573 Japan iwata@kz.tsukuba.ac.jp Abstract. This
Touch Feedback in a Head-Mounted Display Virtual Reality through a Kinesthetic Haptic Device
 Touch Feedback in a Head-Mounted Display Virtual Reality through a Kinesthetic Haptic Device Andrew A. Stanley Stanford University Department of Mechanical Engineering astan@stanford.edu Alice X. Wu Stanford
Touch Feedback in a Head-Mounted Display Virtual Reality through a Kinesthetic Haptic Device Andrew A. Stanley Stanford University Department of Mechanical Engineering astan@stanford.edu Alice X. Wu Stanford
Introduction to robotics. Md. Ferdous Alam, Lecturer, MEE, SUST
 Introduction to robotics Md. Ferdous Alam, Lecturer, MEE, SUST Hello class! Let s watch a video! So, what do you think? It s cool, isn t it? The dedication is not! A brief history The first digital and
Introduction to robotics Md. Ferdous Alam, Lecturer, MEE, SUST Hello class! Let s watch a video! So, what do you think? It s cool, isn t it? The dedication is not! A brief history The first digital and
Sensing self motion. Key points: Why robots need self-sensing Sensors for proprioception in biological systems in robot systems
 Sensing self motion Key points: Why robots need self-sensing Sensors for proprioception in biological systems in robot systems Position sensing Velocity and acceleration sensing Force sensing Vision based
Sensing self motion Key points: Why robots need self-sensing Sensors for proprioception in biological systems in robot systems Position sensing Velocity and acceleration sensing Force sensing Vision based
CS545 Contents XIV. Components of a Robotic System. Signal Processing. Reading Assignment for Next Class
 CS545 Contents XIV Components of a Robotic System Power Supplies and Power Amplifiers Actuators Transmission Sensors Signal Processing Linear filtering Simple filtering Optimal filtering Reading Assignment
CS545 Contents XIV Components of a Robotic System Power Supplies and Power Amplifiers Actuators Transmission Sensors Signal Processing Linear filtering Simple filtering Optimal filtering Reading Assignment
MEAM 520. Haptic Rendering and Teleoperation
 MEAM 520 Haptic Rendering and Teleoperation Katherine J. Kuchenbecker, Ph.D. General Robotics, Automation, Sensing, and Perception Lab (GRASP) MEAM Department, SEAS, University of Pennsylvania Lecture
MEAM 520 Haptic Rendering and Teleoperation Katherine J. Kuchenbecker, Ph.D. General Robotics, Automation, Sensing, and Perception Lab (GRASP) MEAM Department, SEAS, University of Pennsylvania Lecture
Haptic Sensing and Perception for Telerobotic Manipulation
 Haptic Sensing and Perception for Telerobotic Manipulation Emil M. Petriu, Dr. Eng., P.Eng., FIEEE Professor School of Information Technology and Engineering University of Ottawa Ottawa, ON., K1N 6N5 Canada
Haptic Sensing and Perception for Telerobotic Manipulation Emil M. Petriu, Dr. Eng., P.Eng., FIEEE Professor School of Information Technology and Engineering University of Ottawa Ottawa, ON., K1N 6N5 Canada
Lecture 7: Human haptics
 ME 327: Design and Control of Haptic Systems Winter 2018 Lecture 7: Human haptics Allison M. Okamura Stanford University types of haptic sensing kinesthesia/ proprioception/ force cutaneous/ tactile Related
ME 327: Design and Control of Haptic Systems Winter 2018 Lecture 7: Human haptics Allison M. Okamura Stanford University types of haptic sensing kinesthesia/ proprioception/ force cutaneous/ tactile Related
Haptic Display of Contact Location
 Haptic Display of Contact Location Katherine J. Kuchenbecker William R. Provancher Günter Niemeyer Mark R. Cutkosky Telerobotics Lab and Dexterous Manipulation Laboratory Stanford University, Stanford,
Haptic Display of Contact Location Katherine J. Kuchenbecker William R. Provancher Günter Niemeyer Mark R. Cutkosky Telerobotics Lab and Dexterous Manipulation Laboratory Stanford University, Stanford,
Haptic Perception & Human Response to Vibrations
 Sensing HAPTICS Manipulation Haptic Perception & Human Response to Vibrations Tactile Kinesthetic (position / force) Outline: 1. Neural Coding of Touch Primitives 2. Functions of Peripheral Receptors B
Sensing HAPTICS Manipulation Haptic Perception & Human Response to Vibrations Tactile Kinesthetic (position / force) Outline: 1. Neural Coding of Touch Primitives 2. Functions of Peripheral Receptors B
Haptic Rendering CPSC / Sonny Chan University of Calgary
 Haptic Rendering CPSC 599.86 / 601.86 Sonny Chan University of Calgary Today s Outline Announcements Human haptic perception Anatomy of a visual-haptic simulation Virtual wall and potential field rendering
Haptic Rendering CPSC 599.86 / 601.86 Sonny Chan University of Calgary Today s Outline Announcements Human haptic perception Anatomy of a visual-haptic simulation Virtual wall and potential field rendering
International Journal of Advanced Research in Computer Science and Software Engineering
 Volume 3, Issue 3, March 2013 ISSN: 2277 128X International Journal of Advanced Research in Computer Science and Software Engineering Research Paper Available online at: www.ijarcsse.com A Study on SensAble
Volume 3, Issue 3, March 2013 ISSN: 2277 128X International Journal of Advanced Research in Computer Science and Software Engineering Research Paper Available online at: www.ijarcsse.com A Study on SensAble
A Novel Coil Configuration to Extend the Motion Range of Lorentz Force Magnetic Levitation Devices for Haptic Interaction
 A Novel Coil Configuration to Extend the Motion Range of Lorentz Force Magnetic Levitation Devices for Haptic Interaction Peter Berkelman Abstract Lorentz force magnetic levitation devices have been used
A Novel Coil Configuration to Extend the Motion Range of Lorentz Force Magnetic Levitation Devices for Haptic Interaction Peter Berkelman Abstract Lorentz force magnetic levitation devices have been used
Development Scheme of JewelSense: Haptic-based Sculpting Tool for Jewelry Design
 Development Scheme of JewelSense: Haptic-based Sculpting Tool for Jewelry Design S. Wannarumon Kielarova Department of Industrial Engineering, Naresuan University, Phitsanulok 65000 * Corresponding Author
Development Scheme of JewelSense: Haptic-based Sculpting Tool for Jewelry Design S. Wannarumon Kielarova Department of Industrial Engineering, Naresuan University, Phitsanulok 65000 * Corresponding Author
Using Simple Force Feedback Mechanisms as Haptic Visualization Tools.
 Using Simple Force Feedback Mechanisms as Haptic Visualization Tools. Anders J Johansson, Joakim Linde Teiresias Research Group (www.bigfoot.com/~teiresias) Abstract Force feedback (FF) is a technology
Using Simple Force Feedback Mechanisms as Haptic Visualization Tools. Anders J Johansson, Joakim Linde Teiresias Research Group (www.bigfoot.com/~teiresias) Abstract Force feedback (FF) is a technology
Input devices and interaction. Ruth Aylett
 Input devices and interaction Ruth Aylett Contents Tracking What is available Devices Gloves, 6 DOF mouse, WiiMote Why is it important? Interaction is basic to VEs We defined them as interactive in real-time
Input devices and interaction Ruth Aylett Contents Tracking What is available Devices Gloves, 6 DOF mouse, WiiMote Why is it important? Interaction is basic to VEs We defined them as interactive in real-time
Wireless Master-Slave Embedded Controller for a Teleoperated Anthropomorphic Robotic Arm with Gripping Force Sensing
 Wireless Master-Slave Embedded Controller for a Teleoperated Anthropomorphic Robotic Arm with Gripping Force Sensing Presented by: Benjamin B. Rhoades ECGR 6185 Adv. Embedded Systems January 16 th 2013
Wireless Master-Slave Embedded Controller for a Teleoperated Anthropomorphic Robotic Arm with Gripping Force Sensing Presented by: Benjamin B. Rhoades ECGR 6185 Adv. Embedded Systems January 16 th 2013
Using Simulation to Design Control Strategies for Robotic No-Scar Surgery
 Using Simulation to Design Control Strategies for Robotic No-Scar Surgery Antonio DE DONNO 1, Florent NAGEOTTE, Philippe ZANNE, Laurent GOFFIN and Michel de MATHELIN LSIIT, University of Strasbourg/CNRS,
Using Simulation to Design Control Strategies for Robotic No-Scar Surgery Antonio DE DONNO 1, Florent NAGEOTTE, Philippe ZANNE, Laurent GOFFIN and Michel de MATHELIN LSIIT, University of Strasbourg/CNRS,
5HDO 7LPH 6XUJLFDO 6LPXODWLRQ ZLWK +DSWLF 6HQVDWLRQ DV &ROODERUDWHG :RUNV EHWZHHQ -DSDQ DQG *HUPDQ\
 nsuzuki@jikei.ac.jp 1016 N. Suzuki et al. 1). The system should provide a design for the user and determine surgical procedures based on 3D model reconstructed from the patient's data. 2). The system must
nsuzuki@jikei.ac.jp 1016 N. Suzuki et al. 1). The system should provide a design for the user and determine surgical procedures based on 3D model reconstructed from the patient's data. 2). The system must
Interactive Virtual Environments
 Interactive Virtual Environments Introduction Emil M. Petriu, Dr. Eng., FIEEE Professor, School of Information Technology and Engineering University of Ottawa, Ottawa, ON, Canada http://www.site.uottawa.ca/~petriu
Interactive Virtual Environments Introduction Emil M. Petriu, Dr. Eng., FIEEE Professor, School of Information Technology and Engineering University of Ottawa, Ottawa, ON, Canada http://www.site.uottawa.ca/~petriu
Haptic Interface Technologies
 Haptic Interface Technologies 02/14/2010 EECE596: Copyright since 1999, 5/01/2018 EECE596: Copyright since 1999, Sidney Fels Sidney Fels Haptics: Overview Haptics: Introduction tactile proprioception Tactile
Haptic Interface Technologies 02/14/2010 EECE596: Copyright since 1999, 5/01/2018 EECE596: Copyright since 1999, Sidney Fels Sidney Fels Haptics: Overview Haptics: Introduction tactile proprioception Tactile
Humanoid Hands. CHENG Gang Dec Rollin Justin Robot.mp4
 Humanoid Hands CHENG Gang Dec. 2009 Rollin Justin Robot.mp4 Behind the Video Motivation of humanoid hand Serve the people whatever difficult Behind the Video Challenge to humanoid hand Dynamics How to
Humanoid Hands CHENG Gang Dec. 2009 Rollin Justin Robot.mp4 Behind the Video Motivation of humanoid hand Serve the people whatever difficult Behind the Video Challenge to humanoid hand Dynamics How to
Virtual and Augmented Reality Applications
 Department of Engineering for Innovation University of Salento Lecce, Italy Augmented and Virtual Reality Laboratory (AVR Lab) Keynote Speech: Augmented and Virtual Reality Laboratory (AVR Lab) Keynote
Department of Engineering for Innovation University of Salento Lecce, Italy Augmented and Virtual Reality Laboratory (AVR Lab) Keynote Speech: Augmented and Virtual Reality Laboratory (AVR Lab) Keynote
Sensors and Actuators
 Marcello Restelli Dipartimento di Elettronica e Informazione Politecnico di Milano email: restelli@elet.polimi.it tel: 02-2399-4015 Sensors and Actuators Robotics for Computer Engineering students A.A.
Marcello Restelli Dipartimento di Elettronica e Informazione Politecnico di Milano email: restelli@elet.polimi.it tel: 02-2399-4015 Sensors and Actuators Robotics for Computer Engineering students A.A.
Virtual Environments. Ruth Aylett
 Virtual Environments Ruth Aylett Aims of the course 1. To demonstrate a critical understanding of modern VE systems, evaluating the strengths and weaknesses of the current VR technologies 2. To be able
Virtual Environments Ruth Aylett Aims of the course 1. To demonstrate a critical understanding of modern VE systems, evaluating the strengths and weaknesses of the current VR technologies 2. To be able
Applications of Haptics Technology in Advance Robotics
 Applications of Haptics Technology in Advance Robotics Vaibhav N. Fulkar vaibhav.fulkar@hotmail.com Mohit V. Shivramwar mohitshivramwar@gmail.com Anilesh A. Alkari anileshalkari123@gmail.com Abstract Haptic
Applications of Haptics Technology in Advance Robotics Vaibhav N. Fulkar vaibhav.fulkar@hotmail.com Mohit V. Shivramwar mohitshivramwar@gmail.com Anilesh A. Alkari anileshalkari123@gmail.com Abstract Haptic
Multimodal Virtual Environments: MAGIC Toolkit and Visual-Haptic Interaction Paradigms. I-Chun Alexandra Hou
 Multimodal Virtual Environments: MAGIC Toolkit and Visual-Haptic Interaction Paradigms by I-Chun Alexandra Hou B.S., Mechanical Engineering (1995) Massachusetts Institute of Technology Submitted to the
Multimodal Virtual Environments: MAGIC Toolkit and Visual-Haptic Interaction Paradigms by I-Chun Alexandra Hou B.S., Mechanical Engineering (1995) Massachusetts Institute of Technology Submitted to the
A Movement Based Method for Haptic Interaction
 Spring 2014 Haptics Class Project Paper presented at the University of South Florida, April 30, 2014 A Movement Based Method for Haptic Interaction Matthew Clevenger Abstract An abundance of haptic rendering
Spring 2014 Haptics Class Project Paper presented at the University of South Florida, April 30, 2014 A Movement Based Method for Haptic Interaction Matthew Clevenger Abstract An abundance of haptic rendering
Design and Controll of Haptic Glove with McKibben Pneumatic Muscle
 XXVIII. ASR '2003 Seminar, Instruments and Control, Ostrava, May 6, 2003 173 Design and Controll of Haptic Glove with McKibben Pneumatic Muscle KOPEČNÝ, Lukáš Ing., Department of Control and Instrumentation,
XXVIII. ASR '2003 Seminar, Instruments and Control, Ostrava, May 6, 2003 173 Design and Controll of Haptic Glove with McKibben Pneumatic Muscle KOPEČNÝ, Lukáš Ing., Department of Control and Instrumentation,
Integrating PhysX and OpenHaptics: Efficient Force Feedback Generation Using Physics Engine and Haptic Devices
 This is the Pre-Published Version. Integrating PhysX and Opens: Efficient Force Feedback Generation Using Physics Engine and Devices 1 Leon Sze-Ho Chan 1, Kup-Sze Choi 1 School of Nursing, Hong Kong Polytechnic
This is the Pre-Published Version. Integrating PhysX and Opens: Efficient Force Feedback Generation Using Physics Engine and Devices 1 Leon Sze-Ho Chan 1, Kup-Sze Choi 1 School of Nursing, Hong Kong Polytechnic
MEAM 520. Haptic Rendering and Teleoperation
 MEAM 520 Haptic Rendering and Teleoperation Katherine J. Kuchenbecker, Ph.D. General Robotics, Automation, Sensing, and Perception Lab (GRASP) MEAM Department, SEAS, University of Pennsylvania Lecture
MEAM 520 Haptic Rendering and Teleoperation Katherine J. Kuchenbecker, Ph.D. General Robotics, Automation, Sensing, and Perception Lab (GRASP) MEAM Department, SEAS, University of Pennsylvania Lecture
IOSR Journal of Engineering (IOSRJEN) e-issn: , p-issn: , Volume 2, Issue 11 (November 2012), PP 37-43
 e-issn: , p-issn: , Volume 2, Issue 11 (November 2012), PP 37-43") IOSR Journal of Engineering (IOSRJEN) e-issn: 2250-3021, p-issn: 2278-8719, Volume 2, Issue 11 (November 2012), PP 37-43 Operative Precept of robotic arm expending Haptic Virtual System Arnab Das 1, Swagat
IOSR Journal of Engineering (IOSRJEN) e-issn: 2250-3021, p-issn: 2278-8719, Volume 2, Issue 11 (November 2012), PP 37-43 Operative Precept of robotic arm expending Haptic Virtual System Arnab Das 1, Swagat
Whole-Hand Kinesthetic Feedback and Haptic Perception in Dextrous Virtual Manipulation
 100 IEEE TRANSACTIONS ON SYSTEMS, MAN, AND CYBERNETICS PART A: SYSTEMS AND HUMANS, VOL. 33, NO. 1, JANUARY 2003 Whole-Hand Kinesthetic Feedback and Haptic Perception in Dextrous Virtual Manipulation Costas
100 IEEE TRANSACTIONS ON SYSTEMS, MAN, AND CYBERNETICS PART A: SYSTEMS AND HUMANS, VOL. 33, NO. 1, JANUARY 2003 Whole-Hand Kinesthetic Feedback and Haptic Perception in Dextrous Virtual Manipulation Costas
Haptic Feedback in Laparoscopic and Robotic Surgery
 Haptic Feedback in Laparoscopic and Robotic Surgery Dr. Warren Grundfest Professor Bioengineering, Electrical Engineering & Surgery UCLA, Los Angeles, California Acknowledgment This Presentation & Research
Haptic Feedback in Laparoscopic and Robotic Surgery Dr. Warren Grundfest Professor Bioengineering, Electrical Engineering & Surgery UCLA, Los Angeles, California Acknowledgment This Presentation & Research
Small Occupancy Robotic Mechanisms for Endoscopic Surgery
 Small Occupancy Robotic Mechanisms for Endoscopic Surgery Yuki Kobayashi, Shingo Chiyoda, Kouichi Watabe, Masafumi Okada, and Yoshihiko Nakamura Department of Mechano-Informatics, The University of Tokyo,
Small Occupancy Robotic Mechanisms for Endoscopic Surgery Yuki Kobayashi, Shingo Chiyoda, Kouichi Watabe, Masafumi Okada, and Yoshihiko Nakamura Department of Mechano-Informatics, The University of Tokyo,
Expression of 2DOF Fingertip Traction with 1DOF Lateral Skin Stretch
 Expression of 2DOF Fingertip Traction with 1DOF Lateral Skin Stretch Vibol Yem 1, Mai Shibahara 2, Katsunari Sato 2, Hiroyuki Kajimoto 1 1 The University of Electro-Communications, Tokyo, Japan 2 Nara
Expression of 2DOF Fingertip Traction with 1DOF Lateral Skin Stretch Vibol Yem 1, Mai Shibahara 2, Katsunari Sato 2, Hiroyuki Kajimoto 1 1 The University of Electro-Communications, Tokyo, Japan 2 Nara
Force Feedback Mechatronics in Medecine, Healthcare and Rehabilitation
 Force Feedback Mechatronics in Medecine, Healthcare and Rehabilitation J.P. Friconneau 1, P. Garrec 1, F. Gosselin 1, A. Riwan 1, 1 CEA-LIST DTSI/SRSI, CEN/FAR BP6, 92265 Fontenay-aux-Roses, France jean-pierre.friconneau@cea.fr
Force Feedback Mechatronics in Medecine, Healthcare and Rehabilitation J.P. Friconneau 1, P. Garrec 1, F. Gosselin 1, A. Riwan 1, 1 CEA-LIST DTSI/SRSI, CEN/FAR BP6, 92265 Fontenay-aux-Roses, France jean-pierre.friconneau@cea.fr
Abstract. Introduction. Threee Enabling Observations
 The PHANTOM Haptic Interface: A Device for Probing Virtual Objects Thomas H. Massie and J. K. Salisbury. Proceedings of the ASME Winter Annual Meeting, Symposium on Haptic Interfaces for Virtual Environment
The PHANTOM Haptic Interface: A Device for Probing Virtual Objects Thomas H. Massie and J. K. Salisbury. Proceedings of the ASME Winter Annual Meeting, Symposium on Haptic Interfaces for Virtual Environment
FUNDAMENTALS ROBOT TECHNOLOGY. An Introduction to Industrial Robots, T eleoperators and Robot Vehicles. D J Todd. Kogan Page
 FUNDAMENTALS of ROBOT TECHNOLOGY An Introduction to Industrial Robots, T eleoperators and Robot Vehicles D J Todd &\ Kogan Page First published in 1986 by Kogan Page Ltd 120 Pentonville Road, London Nl
FUNDAMENTALS of ROBOT TECHNOLOGY An Introduction to Industrial Robots, T eleoperators and Robot Vehicles D J Todd &\ Kogan Page First published in 1986 by Kogan Page Ltd 120 Pentonville Road, London Nl
Multichannel vibrotactile display for sensory substitution during teleoperation
 2001 SPIE International Symposium on Intelligent Systems and Advanced Manufacturing, Newton, MA, 28-31 October Multichannel vibrotactile display for sensory substitution during teleoperation Thomas Debus
2001 SPIE International Symposium on Intelligent Systems and Advanced Manufacturing, Newton, MA, 28-31 October Multichannel vibrotactile display for sensory substitution during teleoperation Thomas Debus
Discrimination of Virtual Haptic Textures Rendered with Different Update Rates
 Discrimination of Virtual Haptic Textures Rendered with Different Update Rates Seungmoon Choi and Hong Z. Tan Haptic Interface Research Laboratory Purdue University 465 Northwestern Avenue West Lafayette,
Discrimination of Virtual Haptic Textures Rendered with Different Update Rates Seungmoon Choi and Hong Z. Tan Haptic Interface Research Laboratory Purdue University 465 Northwestern Avenue West Lafayette,
Visual - Haptic Interactions in Multimodal Virtual Environments
 Visual - Haptic Interactions in Multimodal Virtual Environments by Wan-Chen Wu B.S., Mechanical Engineering National Taiwan University, 1996 Submitted to the Department of Mechanical Engineering in partial
Visual - Haptic Interactions in Multimodal Virtual Environments by Wan-Chen Wu B.S., Mechanical Engineering National Taiwan University, 1996 Submitted to the Department of Mechanical Engineering in partial
Kinesthetic Feedback on interactive display surfaces
 Kinesthetic Feedback on interactive display surfaces Using Stick-Slip to provide directional forces and kinesthetic feedback on interactive display surfaces Philipp Weitz University of Tampere School of
Kinesthetic Feedback on interactive display surfaces Using Stick-Slip to provide directional forces and kinesthetic feedback on interactive display surfaces Philipp Weitz University of Tampere School of
JEPPIAAR ENGINEERING COLLEGE
 JEPPIAAR ENGINEERING COLLEGE Jeppiaar Nagar, Rajiv Gandhi Salai 600 119 DEPARTMENT OFMECHANICAL ENGINEERING QUESTION BANK VII SEMESTER ME6010 ROBOTICS Regulation 013 JEPPIAAR ENGINEERING COLLEGE Jeppiaar
JEPPIAAR ENGINEERING COLLEGE Jeppiaar Nagar, Rajiv Gandhi Salai 600 119 DEPARTMENT OFMECHANICAL ENGINEERING QUESTION BANK VII SEMESTER ME6010 ROBOTICS Regulation 013 JEPPIAAR ENGINEERING COLLEGE Jeppiaar
CS277 - Experimental Haptics Lecture 2. Haptic Rendering
 CS277 - Experimental Haptics Lecture 2 Haptic Rendering Outline Announcements Human haptic perception Anatomy of a visual-haptic simulation Virtual wall and potential field rendering A note on timing...
CS277 - Experimental Haptics Lecture 2 Haptic Rendering Outline Announcements Human haptic perception Anatomy of a visual-haptic simulation Virtual wall and potential field rendering A note on timing...
Actuators, sensors and control architecture
 Actuators, sensors and control architecture a robot is composed of three fundamental parts actuators besides motors and transmissions, they constitute the locomotion apparatus (wheels, crawlers, mechanical
Actuators, sensors and control architecture a robot is composed of three fundamental parts actuators besides motors and transmissions, they constitute the locomotion apparatus (wheels, crawlers, mechanical
Bibliography. Conclusion
 the almost identical time measured in the real and the virtual execution, and the fact that the real execution with indirect vision to be slower than the manipulation on the simulated environment. The
the almost identical time measured in the real and the virtual execution, and the fact that the real execution with indirect vision to be slower than the manipulation on the simulated environment. The
Design and Operation of a Force-Reflecting Magnetic Levitation Coarse-Fine Teleoperation System
 IEEE International Conference on Robotics and Automation, (ICRA 4) New Orleans, USA, April 6 - May 1, 4, pp. 4147-41. Design and Operation of a Force-Reflecting Magnetic Levitation Coarse-Fine Teleoperation
IEEE International Conference on Robotics and Automation, (ICRA 4) New Orleans, USA, April 6 - May 1, 4, pp. 4147-41. Design and Operation of a Force-Reflecting Magnetic Levitation Coarse-Fine Teleoperation
The Design of key mechanical functions for a super multi-dof and extendable Space Robotic Arm
 The Design of key mechanical functions for a super multi-dof and extendable Space Robotic Arm Kent Yoshikawa*, Yuichiro Tanaka**, Mitsushige Oda***, Hiroki Nakanishi**** *Tokyo Institute of Technology,
The Design of key mechanical functions for a super multi-dof and extendable Space Robotic Arm Kent Yoshikawa*, Yuichiro Tanaka**, Mitsushige Oda***, Hiroki Nakanishi**** *Tokyo Institute of Technology,
ERGOS: Multi-degrees of Freedom and Versatile Force-Feedback Panoply
 ERGOS: Multi-degrees of Freedom and Versatile Force-Feedback Panoply Jean-Loup Florens, Annie Luciani, Claude Cadoz, Nicolas Castagné ACROE-ICA, INPG, 46 Av. Félix Viallet 38000, Grenoble, France florens@imag.fr
ERGOS: Multi-degrees of Freedom and Versatile Force-Feedback Panoply Jean-Loup Florens, Annie Luciani, Claude Cadoz, Nicolas Castagné ACROE-ICA, INPG, 46 Av. Félix Viallet 38000, Grenoble, France florens@imag.fr
Practical Data Visualization and Virtual Reality. Virtual Reality VR Display Systems. Karljohan Lundin Palmerius
 Practical Data Visualization and Virtual Reality Virtual Reality VR Display Systems Karljohan Lundin Palmerius Synopsis Virtual Reality basics Common display systems Visual modality Sound modality Interaction
Practical Data Visualization and Virtual Reality Virtual Reality VR Display Systems Karljohan Lundin Palmerius Synopsis Virtual Reality basics Common display systems Visual modality Sound modality Interaction
MEM380 Applied Autonomous Robots I Winter Feedback Control USARSim
 MEM380 Applied Autonomous Robots I Winter 2011 Feedback Control USARSim Transforming Accelerations into Position Estimates In a perfect world It s not a perfect world. We have noise and bias in our acceleration
MEM380 Applied Autonomous Robots I Winter 2011 Feedback Control USARSim Transforming Accelerations into Position Estimates In a perfect world It s not a perfect world. We have noise and bias in our acceleration
Milind R. Shinde #1, V. N. Bhaiswar *2, B. G. Achmare #3 1 Student of MTECH CAD/CAM, Department of Mechanical Engineering, GHRCE Nagpur, MH, India
 Design and simulation of robotic arm for loading and unloading of work piece on lathe machine by using workspace simulation software: A Review Milind R. Shinde #1, V. N. Bhaiswar *2, B. G. Achmare #3 1
Design and simulation of robotic arm for loading and unloading of work piece on lathe machine by using workspace simulation software: A Review Milind R. Shinde #1, V. N. Bhaiswar *2, B. G. Achmare #3 1
The Haptic Impendance Control through Virtual Environment Force Compensation
 The Haptic Impendance Control through Virtual Environment Force Compensation OCTAVIAN MELINTE Robotics and Mechatronics Department Institute of Solid Mechanicsof the Romanian Academy ROMANIA octavian.melinte@yahoo.com
The Haptic Impendance Control through Virtual Environment Force Compensation OCTAVIAN MELINTE Robotics and Mechatronics Department Institute of Solid Mechanicsof the Romanian Academy ROMANIA octavian.melinte@yahoo.com
Evaluation of Haptic Virtual Fixtures in Psychomotor Skill Development for Robotic Surgical Training
 Department of Electronics, Information and Bioengineering Neuroengineering and medical robotics Lab Evaluation of Haptic Virtual Fixtures in Psychomotor Skill Development for Robotic Surgical Training
Department of Electronics, Information and Bioengineering Neuroengineering and medical robotics Lab Evaluation of Haptic Virtual Fixtures in Psychomotor Skill Development for Robotic Surgical Training
Haptic Rendering and Volumetric Visualization with SenSitus
 Haptic Rendering and Volumetric Visualization with SenSitus Stefan Birmanns, Ph.D. Department of Molecular Biology The Scripps Research Institute 10550 N. Torrey Pines Road, Mail TPC6 La Jolla, California,
Haptic Rendering and Volumetric Visualization with SenSitus Stefan Birmanns, Ph.D. Department of Molecular Biology The Scripps Research Institute 10550 N. Torrey Pines Road, Mail TPC6 La Jolla, California,
APPEAL DECISION. Appeal No USA. Tokyo, Japan. Tokyo, Japan. Tokyo, Japan. Tokyo, Japan
 APPEAL DECISION Appeal No. 2013-6730 USA Appellant IMMERSION CORPORATION Tokyo, Japan Patent Attorney OKABE, Yuzuru Tokyo, Japan Patent Attorney OCHI, Takao Tokyo, Japan Patent Attorney TAKAHASHI, Seiichiro
APPEAL DECISION Appeal No. 2013-6730 USA Appellant IMMERSION CORPORATION Tokyo, Japan Patent Attorney OKABE, Yuzuru Tokyo, Japan Patent Attorney OCHI, Takao Tokyo, Japan Patent Attorney TAKAHASHI, Seiichiro
Development and Testing of a Telemanipulation System with Arm and Hand Motion
 Development and Testing of a Telemanipulation System with Arm and Hand Motion Michael L. Turner, Ryan P. Findley, Weston B. Griffin, Mark R. Cutkosky and Daniel H. Gomez Dexterous Manipulation Laboratory
Development and Testing of a Telemanipulation System with Arm and Hand Motion Michael L. Turner, Ryan P. Findley, Weston B. Griffin, Mark R. Cutkosky and Daniel H. Gomez Dexterous Manipulation Laboratory