CS277 - Experimental Haptics Lecture 1. Introduction to Haptics
|
|
|
- Oliver Tyler
- 5 years ago
- Views:
Transcription

1 CS277 - Experimental Haptics Lecture 1 Introduction to Haptics
2 Haptic Interfaces Enables physical interaction with virtual objects




3 Haptic Rendering Potential Fields Polygonal Meshes Implicit Surfaces Volumetric Data

")


4 Applications CAD (Geomagic / 3D Systems) Entertainment (Novint) Medical (Hansen) Medical (Philips)
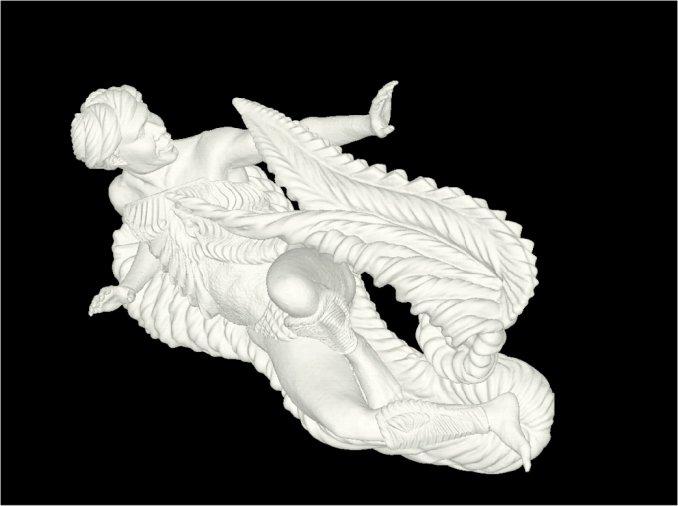

5 Collaborative Haptics ACM SIGGRAPH 1999
6 Today s Outline Course objectives Organization, policies, logistics What is haptics? Haptic interfaces, past and present
7 Course Objectives Understand major topics in haptics Experience rendering virtual objects using a variety of techniques Improve your paper reading and presentation skills Have fun!
8 Course Content Haptic interfaces Haptic rendering - Basic algorithms - Collision detection - Dynamics simulation - Advanced methods Human haptics and psychophysics
9 Administrative Information Instructors - Ken Salisbury, Sonny Chan, François Conti Course Information cs277-spr1314-staff@lists.stanford.edu
10 Grading Grading breakdown: - Programming assignments (4 x 15%) - Project proposal / milestone (10%) - Final course project (30%) Assignments to be completed individually Teams of two for final project
11 Class Enrollment ~20 students (as many as we have devices) Prerequisites: - Object-oriented programming in C++ - CS148/248 or CS223 recommended Information form - To determine your level of interest and ability

12 Programming Assignments Four assignments in four weeks... And a course project! If your interest is in devices and control, please consider ME327 instead.

13 What is Haptics?
14 What is Haptics? Physical interaction via touch Uniquely bi-lateral sensory modality Touching and interacting with real, virtual, and remote environments
15 Why is Haptics Interesting? Primal Intuitive Pervasive Expressive Unexplored...
16 Definition hap tic (adjective) \ hap-tik\ 1. relating to or based on the sense of touch 2. characterized by a predilection for the sense of touch «a haptic person» Etymology: - International Scientific Vocabulary, from Greek haptesthai to touch - First Known Use: ca.1890 CS277 - Experimental [Merriam-Webster Haptics, Stanford online University, dictionary: Spring
17 Nomenclature haptic: an adjective, as in "a haptic interface" haptic interaction: the act of touching objects haptics: use as a noun, the study/practice of haptic interaction haptically: making use of touch interaction haptic interface: device permitting human to have touch interaction with real or virtual environments haptisize: bad English :-) but, like sensorize, found haptical: yikes, no, no.
18 Nomenclature Human Haptics - human touch perception and manipulation Machine Haptics - concerned with robot arms and hands Computer Haptics - concerned with computer-mediated haptics
19 Many Contexts Human haptics every-day manipulation tools, controls music, art, etc. Machine Haptics autonomous robots remote manipulator systems surgical robots, etc. Computer Haptics training design entertainment
20 Information & Power Flows CS277 - Experimental [From M. Haptics, Srinivasan Stanford and University, C. Basdogan, Spring 2014 Comput. & Graphics 21(4), 1997.]

21 Haptic Interfaces
22 Haptic Devices - Outline Haptic stimulation modalities Basic device characteristics Example devices: passive Example devices: active What makes a good haptic interface?
23 Haptic Stimulation Force and position Tactile Vibration Thermal Electrical
24 Device Characteristics Degrees of freedom: number of joints Active/passive: force reflecting or not Grounding: grounded vs. exo-skeletal Sensing quality: resolution, max, range Actuator quality: resolution, max, range Bandwidth



25 Passive Devices Grounded - Keyboards, knobs - Trackballs, mice, pens - Joysticks MicroScribe 3D (Immersion)




26 Passive Devices Exo-skeletal - Gloves, etc. Hand-held - Optical - Electromagnetic - Accelerometer 5DT Data Glove Nintento Wiimote





27 Active Devices Grounded, 1-DOF - Steering wheels Atari Hard Drivin - knobs, etc. Ultimate Per4mer (SC&T) (IntuiTek)


")
28 Active Devices Grounded, 2-DOF - Pens & mice Pencat/Pro - Joysticks WingMan Force (Logitech) Sidewinder Force Feedback 2 (Microsoft)

 Delta")
29 Active Devices Grounded, 3-DOF Xitact IHP Phantom Premium (SensAble) Delta (Force Dimension)

")
 Sigma.")
30 Active Devices Grounded, 6+DOF Virtuose (Haption) Freedom 6S (MPB) Sigma.7 (Force Dimension)

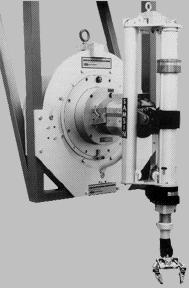
31 Historically...
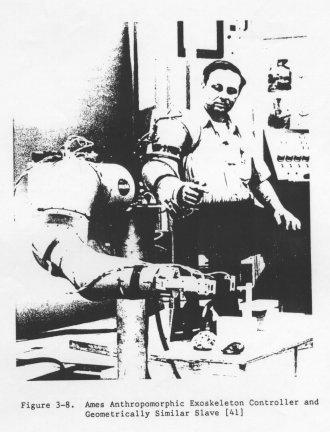

32 History
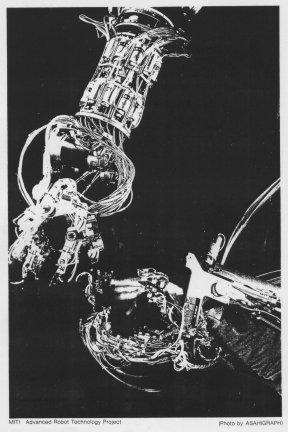
33 History
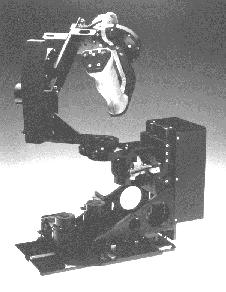
34 History

35 History
36 History

37 History

38 History
39 Other Stimulation Modalities Vibration and tactile arrays (Howe) Thermal stimulation (Ottensmeyer) Tactile/thermal glove (Scuola Superiore) Electrical (Bach-y-Rita) Tangential, haptic flow (Hayward, Bicchi)
40 Other Modalities
41 Other Modalities
42 Don t Forget! - Survey Form STUDENT INFORMATION FORM CS277 - Experimental Haptics Spring Stanford University Name: Background Department Comp. Science Mechanical Eng. Electrical Eng. Other: Program Undergraduate Masters Ph.D. Year: Courses taken cs148 or equiv. cs248 or equiv. cs223 or equiv. Other relevant courses: Experience What? Passable Got Skillz 1337 Object-oriented programming in C++ 3D graphics programming and OpenGL Linear algebra and vector geometry Mechatronic systems design and implementation Environment Please describe your preferred software development platform and environment. Platform Linux Mac OS X Windows Other: Notes: Please indicate if you have access to your own haptic device Development tool Emacs / vi Xcode Visual Studio Other: Motivation My level of interest and motivation for taking this course is most appropriately described by I've got all the time and energy for it! I'm interested, but have alternatives. This is my first choice for my major or research. Just curious / mainly course shopping. In the panel on the right, please describe in brief why you elected to enroll in CS277, and a few things you hope to gain from it.
FORCE FEEDBACK. Roope Raisamo
 FORCE FEEDBACK Roope Raisamo Multimodal Interaction Research Group Tampere Unit for Computer Human Interaction Department of Computer Sciences University of Tampere, Finland Outline Force feedback interfaces
FORCE FEEDBACK Roope Raisamo Multimodal Interaction Research Group Tampere Unit for Computer Human Interaction Department of Computer Sciences University of Tampere, Finland Outline Force feedback interfaces
CS277 - Experimental Haptics Lecture 2. Haptic Rendering
 CS277 - Experimental Haptics Lecture 2 Haptic Rendering Outline Announcements Human haptic perception Anatomy of a visual-haptic simulation Virtual wall and potential field rendering A note on timing...
CS277 - Experimental Haptics Lecture 2 Haptic Rendering Outline Announcements Human haptic perception Anatomy of a visual-haptic simulation Virtual wall and potential field rendering A note on timing...
Force feedback interfaces & applications
 Force feedback interfaces & applications Roope Raisamo Tampere Unit for Computer-Human Interaction (TAUCHI) School of Information Sciences University of Tampere, Finland Based on material by Jukka Raisamo,
Force feedback interfaces & applications Roope Raisamo Tampere Unit for Computer-Human Interaction (TAUCHI) School of Information Sciences University of Tampere, Finland Based on material by Jukka Raisamo,
Lecture 1: Introduction to haptics and Kinesthetic haptic devices
 ME 327: Design and Control of Haptic Systems Winter 2018 Lecture 1: Introduction to haptics and Kinesthetic haptic devices Allison M. Okamura Stanford University today s objectives introduce you to the
ME 327: Design and Control of Haptic Systems Winter 2018 Lecture 1: Introduction to haptics and Kinesthetic haptic devices Allison M. Okamura Stanford University today s objectives introduce you to the
The CHAI Libraries. F. Conti, F. Barbagli, R. Balaniuk, M. Halg, C. Lu, D. Morris L. Sentis, E. Vileshin, J. Warren, O. Khatib, K.
 The CHAI Libraries F. Conti, F. Barbagli, R. Balaniuk, M. Halg, C. Lu, D. Morris L. Sentis, E. Vileshin, J. Warren, O. Khatib, K. Salisbury Computer Science Department, Stanford University, Stanford CA
The CHAI Libraries F. Conti, F. Barbagli, R. Balaniuk, M. Halg, C. Lu, D. Morris L. Sentis, E. Vileshin, J. Warren, O. Khatib, K. Salisbury Computer Science Department, Stanford University, Stanford CA
PROPRIOCEPTION AND FORCE FEEDBACK
 PROPRIOCEPTION AND FORCE FEEDBACK Roope Raisamo and Jukka Raisamo Multimodal Interaction Research Group Tampere Unit for Computer Human Interaction Department of Computer Sciences University of Tampere,
PROPRIOCEPTION AND FORCE FEEDBACK Roope Raisamo and Jukka Raisamo Multimodal Interaction Research Group Tampere Unit for Computer Human Interaction Department of Computer Sciences University of Tampere,
Haptic Rendering CPSC / Sonny Chan University of Calgary
 Haptic Rendering CPSC 599.86 / 601.86 Sonny Chan University of Calgary Today s Outline Announcements Human haptic perception Anatomy of a visual-haptic simulation Virtual wall and potential field rendering
Haptic Rendering CPSC 599.86 / 601.86 Sonny Chan University of Calgary Today s Outline Announcements Human haptic perception Anatomy of a visual-haptic simulation Virtual wall and potential field rendering
Computer Haptics and Applications
 Computer Haptics and Applications EURON Summer School 2003 Cagatay Basdogan, Ph.D. College of Engineering Koc University, Istanbul, 80910 (http://network.ku.edu.tr/~cbasdogan) Resources: EURON Summer School
Computer Haptics and Applications EURON Summer School 2003 Cagatay Basdogan, Ph.D. College of Engineering Koc University, Istanbul, 80910 (http://network.ku.edu.tr/~cbasdogan) Resources: EURON Summer School
Peter Berkelman. ACHI/DigitalWorld
 Magnetic Levitation Haptic Peter Berkelman ACHI/DigitalWorld February 25, 2013 Outline: Haptics - Force Feedback Sample devices: Phantoms, Novint Falcon, Force Dimension Inertia, friction, hysteresis/backlash
Magnetic Levitation Haptic Peter Berkelman ACHI/DigitalWorld February 25, 2013 Outline: Haptics - Force Feedback Sample devices: Phantoms, Novint Falcon, Force Dimension Inertia, friction, hysteresis/backlash
Haptics CS327A
 Haptics CS327A - 217 hap tic adjective relating to the sense of touch or to the perception and manipulation of objects using the senses of touch and proprioception 1 2 Slave Master 3 Courtesy of Walischmiller
Haptics CS327A - 217 hap tic adjective relating to the sense of touch or to the perception and manipulation of objects using the senses of touch and proprioception 1 2 Slave Master 3 Courtesy of Walischmiller
2. Introduction to Computer Haptics
 2. Introduction to Computer Haptics Seungmoon Choi, Ph.D. Assistant Professor Dept. of Computer Science and Engineering POSTECH Outline Basics of Force-Feedback Haptic Interfaces Introduction to Computer
2. Introduction to Computer Haptics Seungmoon Choi, Ph.D. Assistant Professor Dept. of Computer Science and Engineering POSTECH Outline Basics of Force-Feedback Haptic Interfaces Introduction to Computer
Touch Feedback in a Head-Mounted Display Virtual Reality through a Kinesthetic Haptic Device
 Touch Feedback in a Head-Mounted Display Virtual Reality through a Kinesthetic Haptic Device Andrew A. Stanley Stanford University Department of Mechanical Engineering astan@stanford.edu Alice X. Wu Stanford
Touch Feedback in a Head-Mounted Display Virtual Reality through a Kinesthetic Haptic Device Andrew A. Stanley Stanford University Department of Mechanical Engineering astan@stanford.edu Alice X. Wu Stanford
TEACHING HAPTIC RENDERING SONNY CHAN, STANFORD UNIVERSITY
 TEACHING HAPTIC RENDERING SONNY CHAN, STANFORD UNIVERSITY MARCH 4, 2012 HAPTICS SYMPOSIUM Overview A brief introduction to CS 277 @ Stanford Core topics in haptic rendering Use of the CHAI3D framework
TEACHING HAPTIC RENDERING SONNY CHAN, STANFORD UNIVERSITY MARCH 4, 2012 HAPTICS SYMPOSIUM Overview A brief introduction to CS 277 @ Stanford Core topics in haptic rendering Use of the CHAI3D framework
Benefits of using haptic devices in textile architecture
 28 September 2 October 2009, Universidad Politecnica de Valencia, Spain Alberto DOMINGO and Carlos LAZARO (eds.) Benefits of using haptic devices in textile architecture Javier SANCHEZ *, Joan SAVALL a
28 September 2 October 2009, Universidad Politecnica de Valencia, Spain Alberto DOMINGO and Carlos LAZARO (eds.) Benefits of using haptic devices in textile architecture Javier SANCHEZ *, Joan SAVALL a
Seminar: Haptic Interaction in Mobile Environments TIEVS63 (4 ECTS)
") Seminar: Haptic Interaction in Mobile Environments TIEVS63 (4 ECTS) Jussi Rantala Tampere Unit for Computer-Human Interaction (TAUCHI) School of Information Sciences University of Tampere, Finland Contents
Seminar: Haptic Interaction in Mobile Environments TIEVS63 (4 ECTS) Jussi Rantala Tampere Unit for Computer-Human Interaction (TAUCHI) School of Information Sciences University of Tampere, Finland Contents
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute Use an example to explain what is admittance control? You may refer to exoskeleton
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute Use an example to explain what is admittance control? You may refer to exoskeleton
Practical Data Visualization and Virtual Reality. Virtual Reality VR Display Systems. Karljohan Lundin Palmerius
 Practical Data Visualization and Virtual Reality Virtual Reality VR Display Systems Karljohan Lundin Palmerius Synopsis Virtual Reality basics Common display systems Visual modality Sound modality Interaction
Practical Data Visualization and Virtual Reality Virtual Reality VR Display Systems Karljohan Lundin Palmerius Synopsis Virtual Reality basics Common display systems Visual modality Sound modality Interaction
Introduction to Haptics
 Introduction to Haptics Roope Raisamo Multimodal Interaction Research Group Tampere Unit for Computer Human Interaction (TAUCHI) Department of Computer Sciences University of Tampere, Finland Definition
Introduction to Haptics Roope Raisamo Multimodal Interaction Research Group Tampere Unit for Computer Human Interaction (TAUCHI) Department of Computer Sciences University of Tampere, Finland Definition
Haptic Rendering and Volumetric Visualization with SenSitus
 Haptic Rendering and Volumetric Visualization with SenSitus Stefan Birmanns, Ph.D. Department of Molecular Biology The Scripps Research Institute 10550 N. Torrey Pines Road, Mail TPC6 La Jolla, California,
Haptic Rendering and Volumetric Visualization with SenSitus Stefan Birmanns, Ph.D. Department of Molecular Biology The Scripps Research Institute 10550 N. Torrey Pines Road, Mail TPC6 La Jolla, California,
Haptics Technologies: Bringing Touch to Multimedia
 Haptics Technologies: Bringing Touch to Multimedia C2: Haptics Applications Outline Haptic Evolution: from Psychophysics to Multimedia Haptics for Medical Applications Surgical Simulations Stroke-based
Haptics Technologies: Bringing Touch to Multimedia C2: Haptics Applications Outline Haptic Evolution: from Psychophysics to Multimedia Haptics for Medical Applications Surgical Simulations Stroke-based
Using Haptics to Improve Immersion in Virtual Environments
 Using Haptics to Improve Immersion in Virtual Environments Priscilla Ramsamy, Adrian Haffegee, Ronan Jamieson, and Vassil Alexandrov Centre for Advanced Computing and Emerging Technologies, The University
Using Haptics to Improve Immersion in Virtual Environments Priscilla Ramsamy, Adrian Haffegee, Ronan Jamieson, and Vassil Alexandrov Centre for Advanced Computing and Emerging Technologies, The University
Development Scheme of JewelSense: Haptic-based Sculpting Tool for Jewelry Design
 Development Scheme of JewelSense: Haptic-based Sculpting Tool for Jewelry Design S. Wannarumon Kielarova Department of Industrial Engineering, Naresuan University, Phitsanulok 65000 * Corresponding Author
Development Scheme of JewelSense: Haptic-based Sculpting Tool for Jewelry Design S. Wannarumon Kielarova Department of Industrial Engineering, Naresuan University, Phitsanulok 65000 * Corresponding Author
Beyond Visual: Shape, Haptics and Actuation in 3D UI
 Beyond Visual: Shape, Haptics and Actuation in 3D UI Ivan Poupyrev Welcome, Introduction, & Roadmap 3D UIs 101 3D UIs 201 User Studies and 3D UIs Guidelines for Developing 3D UIs Video Games: 3D UIs for
Beyond Visual: Shape, Haptics and Actuation in 3D UI Ivan Poupyrev Welcome, Introduction, & Roadmap 3D UIs 101 3D UIs 201 User Studies and 3D UIs Guidelines for Developing 3D UIs Video Games: 3D UIs for
Using Simple Force Feedback Mechanisms as Haptic Visualization Tools.
 Using Simple Force Feedback Mechanisms as Haptic Visualization Tools. Anders J Johansson, Joakim Linde Teiresias Research Group (www.bigfoot.com/~teiresias) Abstract Force feedback (FF) is a technology
Using Simple Force Feedback Mechanisms as Haptic Visualization Tools. Anders J Johansson, Joakim Linde Teiresias Research Group (www.bigfoot.com/~teiresias) Abstract Force feedback (FF) is a technology
Chapter 2 Introduction to Haptics 2.1 Definition of Haptics
 Chapter 2 Introduction to Haptics 2.1 Definition of Haptics The word haptic originates from the Greek verb hapto to touch and therefore refers to the ability to touch and manipulate objects. The haptic
Chapter 2 Introduction to Haptics 2.1 Definition of Haptics The word haptic originates from the Greek verb hapto to touch and therefore refers to the ability to touch and manipulate objects. The haptic
A Movement Based Method for Haptic Interaction
 Spring 2014 Haptics Class Project Paper presented at the University of South Florida, April 30, 2014 A Movement Based Method for Haptic Interaction Matthew Clevenger Abstract An abundance of haptic rendering
Spring 2014 Haptics Class Project Paper presented at the University of South Florida, April 30, 2014 A Movement Based Method for Haptic Interaction Matthew Clevenger Abstract An abundance of haptic rendering
Development of K-Touch TM Haptic API for Various Datasets
 Development of K-Touch TM Haptic API for Various Datasets Beom-Chan Lee 1 Jong-Phil Kim 2 Jongeun Cha 3 Jeha Ryu 4 ABSTRACT This paper presents development of a new haptic API (Application Programming
Development of K-Touch TM Haptic API for Various Datasets Beom-Chan Lee 1 Jong-Phil Kim 2 Jongeun Cha 3 Jeha Ryu 4 ABSTRACT This paper presents development of a new haptic API (Application Programming
¾ B-TECH (IT) ¾ B-TECH (IT)
 ¾ B-TECH (IT)") HAPTIC TECHNOLOGY V.R.Siddhartha Engineering College Vijayawada. Presented by Sudheer Kumar.S CH.Sreekanth ¾ B-TECH (IT) ¾ B-TECH (IT) Email:samudralasudheer@yahoo.com Email:shri_136@yahoo.co.in Introduction
HAPTIC TECHNOLOGY V.R.Siddhartha Engineering College Vijayawada. Presented by Sudheer Kumar.S CH.Sreekanth ¾ B-TECH (IT) ¾ B-TECH (IT) Email:samudralasudheer@yahoo.com Email:shri_136@yahoo.co.in Introduction
3D User Interfaces. Using the Kinect and Beyond. John Murray. John Murray
 Using the Kinect and Beyond // Center for Games and Playable Media // http://games.soe.ucsc.edu John Murray John Murray Expressive Title Here (Arial) Intelligence Studio Introduction to Interfaces User
Using the Kinect and Beyond // Center for Games and Playable Media // http://games.soe.ucsc.edu John Murray John Murray Expressive Title Here (Arial) Intelligence Studio Introduction to Interfaces User
Applications of Haptics Technology in Advance Robotics
 Applications of Haptics Technology in Advance Robotics Vaibhav N. Fulkar vaibhav.fulkar@hotmail.com Mohit V. Shivramwar mohitshivramwar@gmail.com Anilesh A. Alkari anileshalkari123@gmail.com Abstract Haptic
Applications of Haptics Technology in Advance Robotics Vaibhav N. Fulkar vaibhav.fulkar@hotmail.com Mohit V. Shivramwar mohitshivramwar@gmail.com Anilesh A. Alkari anileshalkari123@gmail.com Abstract Haptic
Virtual Environments. CSCI 420 Computer Graphics Lecture 25. History of Virtual Reality Flight Simulators Immersion, Interaction, Real-time Haptics
 CSCI 420 Computer Graphics Lecture 25 Virtual Environments Jernej Barbic University of Southern California History of Virtual Reality Flight Simulators Immersion, Interaction, Real-time Haptics 1 Virtual
CSCI 420 Computer Graphics Lecture 25 Virtual Environments Jernej Barbic University of Southern California History of Virtual Reality Flight Simulators Immersion, Interaction, Real-time Haptics 1 Virtual
Discrimination of Virtual Haptic Textures Rendered with Different Update Rates
 Discrimination of Virtual Haptic Textures Rendered with Different Update Rates Seungmoon Choi and Hong Z. Tan Haptic Interface Research Laboratory Purdue University 465 Northwestern Avenue West Lafayette,
Discrimination of Virtual Haptic Textures Rendered with Different Update Rates Seungmoon Choi and Hong Z. Tan Haptic Interface Research Laboratory Purdue University 465 Northwestern Avenue West Lafayette,
ABSTRACT. Haptic Technology
 ABSTRACT HAPTICS -- a technology that adds the sense of touch to virtual environment. Haptic interfaces allow the user to feel as well as to see virtual objects on a computer, and so we can give an illusion
ABSTRACT HAPTICS -- a technology that adds the sense of touch to virtual environment. Haptic interfaces allow the user to feel as well as to see virtual objects on a computer, and so we can give an illusion
Virtual Environments. Virtual Reality. History of Virtual Reality. Virtual Reality. Cinerama. Cinerama
 CSCI 480 Computer Graphics Lecture 25 Virtual Environments Virtual Reality computer-simulated environments that can simulate physical presence in places in the real world, as well as in imaginary worlds
CSCI 480 Computer Graphics Lecture 25 Virtual Environments Virtual Reality computer-simulated environments that can simulate physical presence in places in the real world, as well as in imaginary worlds
1/22/13. Virtual Environments. Virtual Reality. History of Virtual Reality. Virtual Reality. Cinerama. Cinerama
 CSCI 480 Computer Graphics Lecture 25 Virtual Environments Apr 29, 2013 Jernej Barbic University of Southern California http://www-bcf.usc.edu/~jbarbic/cs480-s13/ History of Virtual Reality Immersion,
CSCI 480 Computer Graphics Lecture 25 Virtual Environments Apr 29, 2013 Jernej Barbic University of Southern California http://www-bcf.usc.edu/~jbarbic/cs480-s13/ History of Virtual Reality Immersion,
Haptic interaction. Ruth Aylett
 Haptic interaction Ruth Aylett Contents Haptic definition Haptic model Haptic devices Measuring forces Haptic Technologies Haptics refers to manual interactions with environments, such as sensorial exploration
Haptic interaction Ruth Aylett Contents Haptic definition Haptic model Haptic devices Measuring forces Haptic Technologies Haptics refers to manual interactions with environments, such as sensorial exploration
CSE 165: 3D User Interaction. Lecture #11: Travel
 CSE 165: 3D User Interaction Lecture #11: Travel 2 Announcements Homework 3 is on-line, due next Friday Media Teaching Lab has Merge VR viewers to borrow for cell phone based VR http://acms.ucsd.edu/students/medialab/equipment
CSE 165: 3D User Interaction Lecture #11: Travel 2 Announcements Homework 3 is on-line, due next Friday Media Teaching Lab has Merge VR viewers to borrow for cell phone based VR http://acms.ucsd.edu/students/medialab/equipment
Classifying 3D Input Devices
 IMGD 5100: Immersive HCI Classifying 3D Input Devices Robert W. Lindeman Associate Professor Department of Computer Science Worcester Polytechnic Institute gogo@wpi.edu But First Who are you? Name Interests
IMGD 5100: Immersive HCI Classifying 3D Input Devices Robert W. Lindeman Associate Professor Department of Computer Science Worcester Polytechnic Institute gogo@wpi.edu But First Who are you? Name Interests
User Interface Agents
 User Interface Agents Roope Raisamo (rr@cs.uta.fi) Department of Computer Sciences University of Tampere http://www.cs.uta.fi/sat/ User Interface Agents Schiaffino and Amandi [2004]: Interface agents are
User Interface Agents Roope Raisamo (rr@cs.uta.fi) Department of Computer Sciences University of Tampere http://www.cs.uta.fi/sat/ User Interface Agents Schiaffino and Amandi [2004]: Interface agents are
Using Real Objects for Interaction Tasks in Immersive Virtual Environments
 Using Objects for Interaction Tasks in Immersive Virtual Environments Andy Boud, Dr. VR Solutions Pty. Ltd. andyb@vrsolutions.com.au Abstract. The use of immersive virtual environments for industrial applications
Using Objects for Interaction Tasks in Immersive Virtual Environments Andy Boud, Dr. VR Solutions Pty. Ltd. andyb@vrsolutions.com.au Abstract. The use of immersive virtual environments for industrial applications
VR based HCI Techniques & Application. November 29, 2002
 VR based HCI Techniques & Application November 29, 2002 stefan.seipel@hci.uu.se What is Virtual Reality? Coates (1992): Virtual Reality is electronic simulations of environments experienced via head mounted
VR based HCI Techniques & Application November 29, 2002 stefan.seipel@hci.uu.se What is Virtual Reality? Coates (1992): Virtual Reality is electronic simulations of environments experienced via head mounted
Job Description. Commitment: Must be available to work full-time hours, M-F for weeks beginning Summer of 2018.
 Research Intern Director of Research We are seeking a summer intern to support the team to develop prototype 3D sensing systems based on state-of-the-art sensing technologies along with computer vision
Research Intern Director of Research We are seeking a summer intern to support the team to develop prototype 3D sensing systems based on state-of-the-art sensing technologies along with computer vision
Perceptual Overlays for Teaching Advanced Driving Skills
 Perceptual Overlays for Teaching Advanced Driving Skills Brent Gillespie Micah Steele ARC Conference May 24, 2000 5/21/00 1 Outline 1. Haptics in the Driver-Vehicle Interface 2. Perceptual Overlays for
Perceptual Overlays for Teaching Advanced Driving Skills Brent Gillespie Micah Steele ARC Conference May 24, 2000 5/21/00 1 Outline 1. Haptics in the Driver-Vehicle Interface 2. Perceptual Overlays for
MEAM 520. Haptic Rendering and Teleoperation
 MEAM 520 Haptic Rendering and Teleoperation Katherine J. Kuchenbecker, Ph.D. General Robotics, Automation, Sensing, and Perception Lab (GRASP) MEAM Department, SEAS, University of Pennsylvania Lecture
MEAM 520 Haptic Rendering and Teleoperation Katherine J. Kuchenbecker, Ph.D. General Robotics, Automation, Sensing, and Perception Lab (GRASP) MEAM Department, SEAS, University of Pennsylvania Lecture
Computer Assisted Medical Interventions
 Outline Computer Assisted Medical Interventions Force control, collaborative manipulation and telemanipulation Bernard BAYLE Joint course University of Strasbourg, University of Houston, Telecom Paris
Outline Computer Assisted Medical Interventions Force control, collaborative manipulation and telemanipulation Bernard BAYLE Joint course University of Strasbourg, University of Houston, Telecom Paris
Modeling and Experimental Studies of a Novel 6DOF Haptic Device
 Proceedings of The Canadian Society for Mechanical Engineering Forum 2010 CSME FORUM 2010 June 7-9, 2010, Victoria, British Columbia, Canada Modeling and Experimental Studies of a Novel DOF Haptic Device
Proceedings of The Canadian Society for Mechanical Engineering Forum 2010 CSME FORUM 2010 June 7-9, 2010, Victoria, British Columbia, Canada Modeling and Experimental Studies of a Novel DOF Haptic Device
3D interaction techniques in Virtual Reality Applications for Engineering Education
 3D interaction techniques in Virtual Reality Applications for Engineering Education Cristian Dudulean 1, Ionel Stareţu 2 (1) Industrial Highschool Rosenau, Romania E-mail: duduleanc@yahoo.com (2) Transylvania
3D interaction techniques in Virtual Reality Applications for Engineering Education Cristian Dudulean 1, Ionel Stareţu 2 (1) Industrial Highschool Rosenau, Romania E-mail: duduleanc@yahoo.com (2) Transylvania
Technologies. Philippe Fuchs Ecole des Mines, ParisTech, Paris, France. Virtual Reality: Concepts and. Guillaume Moreau.
 Virtual Reality: Concepts and Technologies Editors Philippe Fuchs Ecole des Mines, ParisTech, Paris, France Guillaume Moreau Ecole Centrale de Nantes, CERMA, Nantes, France Pascal Guitton INRIA, University
Virtual Reality: Concepts and Technologies Editors Philippe Fuchs Ecole des Mines, ParisTech, Paris, France Guillaume Moreau Ecole Centrale de Nantes, CERMA, Nantes, France Pascal Guitton INRIA, University
Phantom-X. Unnur Gretarsdottir, Federico Barbagli and Kenneth Salisbury
 Phantom-X Unnur Gretarsdottir, Federico Barbagli and Kenneth Salisbury Computer Science Department, Stanford University, Stanford CA 94305, USA, [ unnurg, barbagli, jks ] @stanford.edu Abstract. This paper
Phantom-X Unnur Gretarsdottir, Federico Barbagli and Kenneth Salisbury Computer Science Department, Stanford University, Stanford CA 94305, USA, [ unnurg, barbagli, jks ] @stanford.edu Abstract. This paper
HAPTIC USER INTERFACES Final lecture
 HAPTIC USER INTERFACES Final lecture Roope Raisamo and Jukka Raisamo Tampere Unit for Computer-Human Interaction (TAUCHI) Department of Computer Sciences University of Tampere, Finland Passing the Course
HAPTIC USER INTERFACES Final lecture Roope Raisamo and Jukka Raisamo Tampere Unit for Computer-Human Interaction (TAUCHI) Department of Computer Sciences University of Tampere, Finland Passing the Course
Short Course on Computational Illumination
 Short Course on Computational Illumination University of Tampere August 9/10, 2012 Matthew Turk Computer Science Department and Media Arts and Technology Program University of California, Santa Barbara
Short Course on Computational Illumination University of Tampere August 9/10, 2012 Matthew Turk Computer Science Department and Media Arts and Technology Program University of California, Santa Barbara
Haptics and the User Interface
 Haptics and the User Interface based on slides from Karon MacLean, original slides available at: http://www.cs.ubc.ca/~maclean/publics/ what is haptic? from Greek haptesthai : to touch Haptic User Interfaces
Haptics and the User Interface based on slides from Karon MacLean, original slides available at: http://www.cs.ubc.ca/~maclean/publics/ what is haptic? from Greek haptesthai : to touch Haptic User Interfaces
HAPTIC DEVICES FOR DESKTOP VIRTUAL PROTOTYPING APPLICATIONS
 The 3rd International Conference on Computational Mechanics and Virtual Engineering COMEC 2009 29 30 OCTOBER 2009, Brasov, Romania HAPTIC DEVICES FOR DESKTOP VIRTUAL PROTOTYPING APPLICATIONS A. Fratu 1,
The 3rd International Conference on Computational Mechanics and Virtual Engineering COMEC 2009 29 30 OCTOBER 2009, Brasov, Romania HAPTIC DEVICES FOR DESKTOP VIRTUAL PROTOTYPING APPLICATIONS A. Fratu 1,
Phantom-Based Haptic Interaction
 Phantom-Based Haptic Interaction Aimee Potts University of Minnesota, Morris 801 Nevada Ave. Apt. 7 Morris, MN 56267 (320) 589-0170 pottsal@cda.mrs.umn.edu ABSTRACT Haptic interaction is a new field of
Phantom-Based Haptic Interaction Aimee Potts University of Minnesota, Morris 801 Nevada Ave. Apt. 7 Morris, MN 56267 (320) 589-0170 pottsal@cda.mrs.umn.edu ABSTRACT Haptic interaction is a new field of
MEAM 520. Haptic Rendering and Teleoperation
 MEAM 520 Haptic Rendering and Teleoperation Katherine J. Kuchenbecker, Ph.D. General Robotics, Automation, Sensing, and Perception Lab (GRASP) MEAM Department, SEAS, University of Pennsylvania Lecture
MEAM 520 Haptic Rendering and Teleoperation Katherine J. Kuchenbecker, Ph.D. General Robotics, Automation, Sensing, and Perception Lab (GRASP) MEAM Department, SEAS, University of Pennsylvania Lecture
Classifying 3D Input Devices
 IMGD 5100: Immersive HCI Classifying 3D Input Devices Robert W. Lindeman Associate Professor Department of Computer Science Worcester Polytechnic Institute gogo@wpi.edu Motivation The mouse and keyboard
IMGD 5100: Immersive HCI Classifying 3D Input Devices Robert W. Lindeman Associate Professor Department of Computer Science Worcester Polytechnic Institute gogo@wpi.edu Motivation The mouse and keyboard
Haptic presentation of 3D objects in virtual reality for the visually disabled
 Haptic presentation of 3D objects in virtual reality for the visually disabled M Moranski, A Materka Institute of Electronics, Technical University of Lodz, Wolczanska 211/215, Lodz, POLAND marcin.moranski@p.lodz.pl,
Haptic presentation of 3D objects in virtual reality for the visually disabled M Moranski, A Materka Institute of Electronics, Technical University of Lodz, Wolczanska 211/215, Lodz, POLAND marcin.moranski@p.lodz.pl,
Haptic Rendering: Introductory Concepts
 Rendering: Introductory Concepts Human operator Video and audio device Audio-visual rendering rendering Kenneth Salisbury and Francois Conti Stanford University Federico Barbagli Stanford University and
Rendering: Introductory Concepts Human operator Video and audio device Audio-visual rendering rendering Kenneth Salisbury and Francois Conti Stanford University Federico Barbagli Stanford University and
Video Games and Interfaces: Past, Present and Future Class #2: Intro to Video Game User Interfaces
 Video Games and Interfaces: Past, Present and Future Class #2: Intro to Video Game User Interfaces Content based on Dr.LaViola s class: 3D User Interfaces for Games and VR What is a User Interface? Where
Video Games and Interfaces: Past, Present and Future Class #2: Intro to Video Game User Interfaces Content based on Dr.LaViola s class: 3D User Interfaces for Games and VR What is a User Interface? Where
Haptic Rendering: Introductory Concepts
 Haptic Rendering: Introductory Concepts Kenneth Salisbury, Federico Barbagli, Francois Conti Stanford Robotics Lab - Stanford University - Stanford, CA, U.S.A. Dipartimento di Inegneria dell Informazione
Haptic Rendering: Introductory Concepts Kenneth Salisbury, Federico Barbagli, Francois Conti Stanford Robotics Lab - Stanford University - Stanford, CA, U.S.A. Dipartimento di Inegneria dell Informazione
Invited Chapter in Automation, Miniature Robotics and Sensors for Non-Destructive Testing and Evaluation, Y. Bar-Cohen Editor, April 99
 10.2 HAPTIC INTERFACES Yoseph Bar-Cohen Jet Propulsion Laboratory, Caltech, 4800 Oak Grove Dr., Pasadena, CA 90740 818-354-2610, fax 818-393-4057, yosi@jpl.nasa.gov Constantinos Mavroidis, and Charles
10.2 HAPTIC INTERFACES Yoseph Bar-Cohen Jet Propulsion Laboratory, Caltech, 4800 Oak Grove Dr., Pasadena, CA 90740 818-354-2610, fax 818-393-4057, yosi@jpl.nasa.gov Constantinos Mavroidis, and Charles
Haptic, vestibular and other physical input/output devices
 Human Touch Sensing - recap Haptic, vestibular and other physical input/output devices SGN-5406 Virtual Reality Autumn 2007 ismo.rakkolainen@tut.fi The human sensitive areas for touch: Hand, face Many
Human Touch Sensing - recap Haptic, vestibular and other physical input/output devices SGN-5406 Virtual Reality Autumn 2007 ismo.rakkolainen@tut.fi The human sensitive areas for touch: Hand, face Many
Novel machine interface for scaled telesurgery
 Novel machine interface for scaled telesurgery S. Clanton, D. Wang, Y. Matsuoka, D. Shelton, G. Stetten SPIE Medical Imaging, vol. 5367, pp. 697-704. San Diego, Feb. 2004. A Novel Machine Interface for
Novel machine interface for scaled telesurgery S. Clanton, D. Wang, Y. Matsuoka, D. Shelton, G. Stetten SPIE Medical Imaging, vol. 5367, pp. 697-704. San Diego, Feb. 2004. A Novel Machine Interface for
HAND-SHAPED INTERFACE FOR INTUITIVE HUMAN- ROBOT COMMUNICATION THROUGH HAPTIC MEDIA
 HAND-SHAPED INTERFACE FOR INTUITIVE HUMAN- ROBOT COMMUNICATION THROUGH HAPTIC MEDIA RIKU HIKIJI AND SHUJI HASHIMOTO Department of Applied Physics, School of Science and Engineering, Waseda University 3-4-1
HAND-SHAPED INTERFACE FOR INTUITIVE HUMAN- ROBOT COMMUNICATION THROUGH HAPTIC MEDIA RIKU HIKIJI AND SHUJI HASHIMOTO Department of Applied Physics, School of Science and Engineering, Waseda University 3-4-1
Haptic Technology: A Touch Revolution
 Haptic Technology: A Touch Revolution Er. Ifat Rasheed M.Tech, Department of Electronics and Communication Engineering, Lovely Professional University, Phagwara.(India) ABSTRACT Software engineering finds
Haptic Technology: A Touch Revolution Er. Ifat Rasheed M.Tech, Department of Electronics and Communication Engineering, Lovely Professional University, Phagwara.(India) ABSTRACT Software engineering finds
Haptics ME7960, Sect. 007 Lect. 6: Device Design I
 Haptics ME7960, Sect. 007 Lect. 6: Device Design I Spring 2009 Prof. William Provancher Prof. Jake Abbott University of Utah Salt Lake City, UT USA Today s Class Haptic Device Review (be sure to review
Haptics ME7960, Sect. 007 Lect. 6: Device Design I Spring 2009 Prof. William Provancher Prof. Jake Abbott University of Utah Salt Lake City, UT USA Today s Class Haptic Device Review (be sure to review
Simulation and Training with Haptic Feedback A Review
 The 3 rd International Conference on Virtual Learning, ICVL 2008 45 Simulation and Training with Haptic Feedback A Review Simona Clapan 1, Felix G. Hamza-Lup 1 (1) Computer Science, Armstrong Atlantic
The 3 rd International Conference on Virtual Learning, ICVL 2008 45 Simulation and Training with Haptic Feedback A Review Simona Clapan 1, Felix G. Hamza-Lup 1 (1) Computer Science, Armstrong Atlantic
International Journal of Advanced Research in Computer Science and Software Engineering
 Volume 3, Issue 3, March 2013 ISSN: 2277 128X International Journal of Advanced Research in Computer Science and Software Engineering Research Paper Available online at: www.ijarcsse.com A Study on SensAble
Volume 3, Issue 3, March 2013 ISSN: 2277 128X International Journal of Advanced Research in Computer Science and Software Engineering Research Paper Available online at: www.ijarcsse.com A Study on SensAble
PERFORMANCE IN A HAPTIC ENVIRONMENT ABSTRACT
 PERFORMANCE IN A HAPTIC ENVIRONMENT Michael V. Doran,William Owen, and Brian Holbert University of South Alabama School of Computer and Information Sciences Mobile, Alabama 36688 (334) 460-6390 doran@cis.usouthal.edu,
PERFORMANCE IN A HAPTIC ENVIRONMENT Michael V. Doran,William Owen, and Brian Holbert University of South Alabama School of Computer and Information Sciences Mobile, Alabama 36688 (334) 460-6390 doran@cis.usouthal.edu,
Haptic Battle Pong: High-Degree-of-Freedom Haptics in a Multiplayer Gaming Environment
 Haptic Battle Pong: High-Degree-of-Freedom Haptics in a Multiplayer Gaming Environment Dan Morris Stanford University dmorris@cs.stanford.edu Neel Joshi Univ of California, San Diego njoshi@cs.ucsd.edu
Haptic Battle Pong: High-Degree-of-Freedom Haptics in a Multiplayer Gaming Environment Dan Morris Stanford University dmorris@cs.stanford.edu Neel Joshi Univ of California, San Diego njoshi@cs.ucsd.edu
Title: A Comparison of Different Tactile Output Devices In An Aviation Application
 Page 1 of 6; 12/2/08 Thesis Proposal Title: A Comparison of Different Tactile Output Devices In An Aviation Application Student: Sharath Kanakamedala Advisor: Christopher G. Prince Proposal: (1) Provide
Page 1 of 6; 12/2/08 Thesis Proposal Title: A Comparison of Different Tactile Output Devices In An Aviation Application Student: Sharath Kanakamedala Advisor: Christopher G. Prince Proposal: (1) Provide
An Excavator Simulator for Determining the Principles of Operator Efficiency for Hydraulic Multi-DOF Systems Mark Elton and Dr. Wayne Book ABSTRACT
 An Excavator Simulator for Determining the Principles of Operator Efficiency for Hydraulic Multi-DOF Systems Mark Elton and Dr. Wayne Book Georgia Institute of Technology ABSTRACT This paper discusses
An Excavator Simulator for Determining the Principles of Operator Efficiency for Hydraulic Multi-DOF Systems Mark Elton and Dr. Wayne Book Georgia Institute of Technology ABSTRACT This paper discusses
Six d.o.f Haptic Rendered Simulation of the Peg-in- Hole Assembly
 University of Wollongong Research Online Faculty of Informatics - Papers (Archive) Faculty of Engineering and Information Sciences 2003 Six d.o.f Haptic Rendered Simulation of the Peg-in- Hole Assembly
University of Wollongong Research Online Faculty of Informatics - Papers (Archive) Faculty of Engineering and Information Sciences 2003 Six d.o.f Haptic Rendered Simulation of the Peg-in- Hole Assembly
The Effect of Haptic Feedback on Basic Social Interaction within Shared Virtual Environments
 The Effect of Haptic Feedback on Basic Social Interaction within Shared Virtual Environments Elias Giannopoulos 1, Victor Eslava 2, María Oyarzabal 2, Teresa Hierro 2, Laura González 2, Manuel Ferre 2,
The Effect of Haptic Feedback on Basic Social Interaction within Shared Virtual Environments Elias Giannopoulos 1, Victor Eslava 2, María Oyarzabal 2, Teresa Hierro 2, Laura González 2, Manuel Ferre 2,
Haptic interaction. Ruth Aylett
 Haptic interaction Ruth Aylett Contents Haptic definition Haptic model Haptic devices Measuring forces Haptic Technologies Haptics refers to manual interactions with environments, such as sensorial exploration
Haptic interaction Ruth Aylett Contents Haptic definition Haptic model Haptic devices Measuring forces Haptic Technologies Haptics refers to manual interactions with environments, such as sensorial exploration
Abstract. 1. Introduction
 GRAPHICAL AND HAPTIC INTERACTION WITH LARGE 3D COMPRESSED OBJECTS Krasimir Kolarov Interval Research Corp., 1801-C Page Mill Road, Palo Alto, CA 94304 Kolarov@interval.com Abstract The use of force feedback
GRAPHICAL AND HAPTIC INTERACTION WITH LARGE 3D COMPRESSED OBJECTS Krasimir Kolarov Interval Research Corp., 1801-C Page Mill Road, Palo Alto, CA 94304 Kolarov@interval.com Abstract The use of force feedback
Tele-operation of a Robot Arm with Electro Tactile Feedback
 F Tele-operation of a Robot Arm with Electro Tactile Feedback Daniel S. Pamungkas and Koren Ward * Abstract Tactile feedback from a remotely controlled robotic arm can facilitate certain tasks by enabling
F Tele-operation of a Robot Arm with Electro Tactile Feedback Daniel S. Pamungkas and Koren Ward * Abstract Tactile feedback from a remotely controlled robotic arm can facilitate certain tasks by enabling
Integrating PhysX and OpenHaptics: Efficient Force Feedback Generation Using Physics Engine and Haptic Devices
 This is the Pre-Published Version. Integrating PhysX and Opens: Efficient Force Feedback Generation Using Physics Engine and Devices 1 Leon Sze-Ho Chan 1, Kup-Sze Choi 1 School of Nursing, Hong Kong Polytechnic
This is the Pre-Published Version. Integrating PhysX and Opens: Efficient Force Feedback Generation Using Physics Engine and Devices 1 Leon Sze-Ho Chan 1, Kup-Sze Choi 1 School of Nursing, Hong Kong Polytechnic
Development of a Laboratory Kit for Robotics Engineering Education
 Development of a Laboratory Kit for Robotics Engineering Education Taskin Padir, William Michalson, Greg Fischer, Gary Pollice Worcester Polytechnic Institute Robotics Engineering Program tpadir@wpi.edu
Development of a Laboratory Kit for Robotics Engineering Education Taskin Padir, William Michalson, Greg Fischer, Gary Pollice Worcester Polytechnic Institute Robotics Engineering Program tpadir@wpi.edu
Tactile Interactions During Robot Assisted Surgical Interventions. Lakmal Seneviratne
 Tactile Interactions During Robot Assisted Surgical Interventions Lakmal Seneviratne Professor of Mechatronics Kings College London Professor of Mechanical Eng. Khalifa Univeristy, Abu Dhabi. 1 Overview
Tactile Interactions During Robot Assisted Surgical Interventions Lakmal Seneviratne Professor of Mechatronics Kings College London Professor of Mechanical Eng. Khalifa Univeristy, Abu Dhabi. 1 Overview
Drumtastic: Haptic Guidance for Polyrhythmic Drumming Practice
 Drumtastic: Haptic Guidance for Polyrhythmic Drumming Practice ABSTRACT W e present Drumtastic, an application where the user interacts with two Novint Falcon haptic devices to play virtual drums. The
Drumtastic: Haptic Guidance for Polyrhythmic Drumming Practice ABSTRACT W e present Drumtastic, an application where the user interacts with two Novint Falcon haptic devices to play virtual drums. The
Haptic Technology- Comprehensive Review Study with its Applications
 Haptic Technology- Comprehensive Review Study with its Applications Tanya Jaiswal 1, Rambha Yadav 2, Pooja Kedia 3 1,2 Student, Department of Computer Science and Engineering, Buddha Institute of Technology,
Haptic Technology- Comprehensive Review Study with its Applications Tanya Jaiswal 1, Rambha Yadav 2, Pooja Kedia 3 1,2 Student, Department of Computer Science and Engineering, Buddha Institute of Technology,
Haptic Rendering of Large-Scale VEs
 Haptic Rendering of Large-Scale VEs Dr. Mashhuda Glencross and Prof. Roger Hubbold Manchester University (UK) EPSRC Grant: GR/S23087/0 Perceiving the Sense of Touch Important considerations: Burdea: Haptic
Haptic Rendering of Large-Scale VEs Dr. Mashhuda Glencross and Prof. Roger Hubbold Manchester University (UK) EPSRC Grant: GR/S23087/0 Perceiving the Sense of Touch Important considerations: Burdea: Haptic
Auto und Umwelt - das Auto als Plattform für Interaktive
 Der Fahrer im Dialog mit Auto und Umwelt - das Auto als Plattform für Interaktive Anwendungen Prof. Dr. Albrecht Schmidt Pervasive Computing University Duisburg-Essen http://www.pervasive.wiwi.uni-due.de/
Der Fahrer im Dialog mit Auto und Umwelt - das Auto als Plattform für Interaktive Anwendungen Prof. Dr. Albrecht Schmidt Pervasive Computing University Duisburg-Essen http://www.pervasive.wiwi.uni-due.de/
4/23/16. Virtual Reality. Virtual reality. Virtual reality is a hot topic today. Virtual reality
 CSCI 420 Computer Graphics Lecture 25 Virtual Reality Virtual reality computer-simulated environments that can simulate physical presence in places in the real world, as well as in imaginary worlds History
CSCI 420 Computer Graphics Lecture 25 Virtual Reality Virtual reality computer-simulated environments that can simulate physical presence in places in the real world, as well as in imaginary worlds History
Tele-operation of a robot arm with electro tactile feedback
 University of Wollongong Research Online Faculty of Engineering and Information Sciences - Papers: Part A Faculty of Engineering and Information Sciences 2013 Tele-operation of a robot arm with electro
University of Wollongong Research Online Faculty of Engineering and Information Sciences - Papers: Part A Faculty of Engineering and Information Sciences 2013 Tele-operation of a robot arm with electro
We are IntechOpen, the world s leading publisher of Open Access books Built by scientists, for scientists. International authors and editors
 We are IntechOpen, the world s leading publisher of Open Access books Built by scientists, for scientists 3,800 116,000 120M Open access books available International authors and editors Downloads Our
We are IntechOpen, the world s leading publisher of Open Access books Built by scientists, for scientists 3,800 116,000 120M Open access books available International authors and editors Downloads Our
CHAPTER 2. RELATED WORK 9 similar study, Gillespie (1996) built a one-octave force-feedback piano keyboard to convey forces derived from this model to
 built a one-octave force-feedback piano keyboard to convey forces derived from this model to") Chapter 2 Related Work 2.1 Haptic Feedback in Music Controllers The enhancement of computer-based instrumentinterfaces with haptic feedback dates back to the late 1970s, when Claude Cadoz and his colleagues
Chapter 2 Related Work 2.1 Haptic Feedback in Music Controllers The enhancement of computer-based instrumentinterfaces with haptic feedback dates back to the late 1970s, when Claude Cadoz and his colleagues
ERGOS: Multi-degrees of Freedom and Versatile Force-Feedback Panoply
 ERGOS: Multi-degrees of Freedom and Versatile Force-Feedback Panoply Jean-Loup Florens, Annie Luciani, Claude Cadoz, Nicolas Castagné ACROE-ICA, INPG, 46 Av. Félix Viallet 38000, Grenoble, France florens@imag.fr
ERGOS: Multi-degrees of Freedom and Versatile Force-Feedback Panoply Jean-Loup Florens, Annie Luciani, Claude Cadoz, Nicolas Castagné ACROE-ICA, INPG, 46 Av. Félix Viallet 38000, Grenoble, France florens@imag.fr
Evaluation of pseudo-haptic feedback for simulating torque: a comparison between isometric and elastic input devices
 Evaluation of pseudo-haptic feedback for simulating torque: a comparison between isometric and elastic input devices Alexis Paljic, Jean-Marie Burkhardt, Sabine Coquillart To cite this version: Alexis
Evaluation of pseudo-haptic feedback for simulating torque: a comparison between isometric and elastic input devices Alexis Paljic, Jean-Marie Burkhardt, Sabine Coquillart To cite this version: Alexis
CSCI 599 Physically Based Modeling for Interactive Simulation and Games Topic: Haptics
 CSCI 599 Physically Based Modeling for Interactive Simulation and Games Topic: Haptics Mathematica It is a powerful tool. It can be used to check if the code works correct. Simple usage by example: 1.
CSCI 599 Physically Based Modeling for Interactive Simulation and Games Topic: Haptics Mathematica It is a powerful tool. It can be used to check if the code works correct. Simple usage by example: 1.
PRODUCTS AND LAB SOLUTIONS
 PRODUCTS AND LAB SOLUTIONS ENGINEERING FUNDAMENTALS NI ELVIS APPLICATION BOARDS Controls Board Energy Systems Board Mechatronic Systems Board with NI ELVIS III Mechatronic Sensors Board Mechatronic Actuators
PRODUCTS AND LAB SOLUTIONS ENGINEERING FUNDAMENTALS NI ELVIS APPLICATION BOARDS Controls Board Energy Systems Board Mechatronic Systems Board with NI ELVIS III Mechatronic Sensors Board Mechatronic Actuators
Overview of current developments in haptic APIs
 Central European Seminar on Computer Graphics for students, 2011 AUTHOR: Petr Kadleček SUPERVISOR: Petr Kmoch Overview of current developments in haptic APIs Presentation Haptics Haptic programming Haptic
Central European Seminar on Computer Graphics for students, 2011 AUTHOR: Petr Kadleček SUPERVISOR: Petr Kmoch Overview of current developments in haptic APIs Presentation Haptics Haptic programming Haptic
What is Virtual Reality? Burdea,1993. Virtual Reality Triangle Triangle I 3 I 3. Virtual Reality in Product Development. Virtual Reality Technology
 Virtual Reality man made reality sense world What is Virtual Reality? Dipl-Ing Indra Kusumah Digital Product Design Fraunhofer IPT Steinbachstrasse 17 D-52074 Aachen Indrakusumah@iptfraunhoferde wwwiptfraunhoferde
Virtual Reality man made reality sense world What is Virtual Reality? Dipl-Ing Indra Kusumah Digital Product Design Fraunhofer IPT Steinbachstrasse 17 D-52074 Aachen Indrakusumah@iptfraunhoferde wwwiptfraunhoferde
EE 267: Introduction and Overview!
 ! EE 267: Introduction and Overview! Gordon Wetzstein! Stanford University! EE 267 Virtual Reality! Lecture 1! stanford.edu/class/ee267/!! vir tu al re al i ty! vərch(əw)əl rē alədē!!!! the computer-generated
! EE 267: Introduction and Overview! Gordon Wetzstein! Stanford University! EE 267 Virtual Reality! Lecture 1! stanford.edu/class/ee267/!! vir tu al re al i ty! vərch(əw)əl rē alədē!!!! the computer-generated
MECHANICAL DESIGN LEARNING ENVIRONMENTS BASED ON VIRTUAL REALITY TECHNOLOGIES
 INTERNATIONAL CONFERENCE ON ENGINEERING AND PRODUCT DESIGN EDUCATION 4 & 5 SEPTEMBER 2008, UNIVERSITAT POLITECNICA DE CATALUNYA, BARCELONA, SPAIN MECHANICAL DESIGN LEARNING ENVIRONMENTS BASED ON VIRTUAL
INTERNATIONAL CONFERENCE ON ENGINEERING AND PRODUCT DESIGN EDUCATION 4 & 5 SEPTEMBER 2008, UNIVERSITAT POLITECNICA DE CATALUNYA, BARCELONA, SPAIN MECHANICAL DESIGN LEARNING ENVIRONMENTS BASED ON VIRTUAL
Fuzzy Logic Based Force-Feedback for Obstacle Collision Avoidance of Robot Manipulators
 Fuzzy Logic Based Force-Feedback for Obstacle Collision Avoidance of Robot Manipulators D. Wijayasekara, M. Manic Department of Computer Science University of Idaho Idaho Falls, USA wija2589@vandals.uidaho.edu,
Fuzzy Logic Based Force-Feedback for Obstacle Collision Avoidance of Robot Manipulators D. Wijayasekara, M. Manic Department of Computer Science University of Idaho Idaho Falls, USA wija2589@vandals.uidaho.edu,
Output Devices - Non-Visual
 IMGD 5100: Immersive HCI Output Devices - Non-Visual Robert W. Lindeman Associate Professor Department of Computer Science Worcester Polytechnic Institute gogo@wpi.edu Overview Here we are concerned with
IMGD 5100: Immersive HCI Output Devices - Non-Visual Robert W. Lindeman Associate Professor Department of Computer Science Worcester Polytechnic Institute gogo@wpi.edu Overview Here we are concerned with
Drafting Technology (DT) Contact the Design and Consumer Eudcation Department for further information. (760) , ext Office: ST-49
 Contact the Design and Consumer Eudcation Department for further information. (760) , ext Office: ST-49") Disability Resource-Drafting Technology This individualized course is designed to assess, by means of diagnostic testing and the California Community College learning disability eligibility process, the
Disability Resource-Drafting Technology This individualized course is designed to assess, by means of diagnostic testing and the California Community College learning disability eligibility process, the
Comparing Two Haptic Interfaces for Multimodal Graph Rendering
 Comparing Two Haptic Interfaces for Multimodal Graph Rendering Wai Yu, Stephen Brewster Glasgow Interactive Systems Group, Department of Computing Science, University of Glasgow, U. K. {rayu, stephen}@dcs.gla.ac.uk,
Comparing Two Haptic Interfaces for Multimodal Graph Rendering Wai Yu, Stephen Brewster Glasgow Interactive Systems Group, Department of Computing Science, University of Glasgow, U. K. {rayu, stephen}@dcs.gla.ac.uk,