TEACHING HAPTIC RENDERING SONNY CHAN, STANFORD UNIVERSITY
|
|
|
- Luke Higgins
- 5 years ago
- Views:
Transcription

1 TEACHING HAPTIC RENDERING SONNY CHAN, STANFORD UNIVERSITY MARCH 4, 2012 HAPTICS SYMPOSIUM
2 Overview A brief introduction to CS Stanford Core topics in haptic rendering Use of the CHAI3D framework Development of homework assignments Haptic rendering course projects

3 CS 277 Experimental Haptics Stanford
4 CS 277: Experimental Haptics Really a haptic rendering course Has its roots in the computer science department, but we get a good mix of students Workload is 4 programming assignments plus open-ended course project Students usually design a game, but other projects, including mechanisms, are encouraged







5 THE FOUNDERS F. Conti J. K. Salisbury AND THE TORCH BEARERS F. Barbagli C. Sewell D. Morris S. Chan A. Leeper

6 Core Topics in Haptic Rendering
7 Teaching Haptic Rendering Identify key computational algorithms and data structures required for haptic rendering Present the algorithms in a progressive, coherent, and consistent style We ve settled on a syllabus that roughly follows historic progression
8 Introductory Concepts M. A. Srinivasan and C. Basdogan Haptic interfaces Impedence rendering 1000 Hz control loop Virtual wall Salisbury et al. introduced an extension of the godject algorithm for virtual objects based on implicit surces with an analytical representation.18 For implicit rfaces, collision detection is much faster and we can lculate many of the variables necessary for computg the interaction force, such as its direction and inteny, using closed analytical forms. Other examples of DOF interaction include algorithms for interaction th NURBS-based19 and with Voxels-based objects.20 Force field rendering More than 3-DOF interaction. Although the int interaction metaphor has proven to be surprisingly Human operator Fig. x(t) 1. Haptic F(t) interaction between Haptic device humans x(k) and machines. F(K ) Haptic rendering neurophysiology, and human perceptual as well as the related work by others, but do not claim to be motor capabilities ( exhaustive in covering the literature. In Section 2, we a Machine sensorimotor loop: when the human user describe the salient and quantitative Haptic devices create a closed loop between user terminology and hapticmanipulates the end-effector of the haptic interface results in human haptics. In Section 3, we give device, the position sensorsalgorithms. on the device convey its and primaryf(t) classifications of haptic interfaces positio and rendering/simulation x(t) are continuous-time tip position to the computer. The models of objects discuss the relevant issues briefly. Section 4 focuses and force and in thesignals computer exchanged calculate in real-timebetween the torque user on the and recent haptic advances indevice. the softwarex(k) aspects of F(K commands to the actuators on the haptic interface, haptic displays. In the next two sections. we describe are discrete-time and exchanged between haptic so that appropriate position reaction forces are force applied onsignals briefly the issues and our experiences in two areas: the user, leading to tactual perception of virtual Section 5 is on multimodal VEs composed of visual, device and virtual environment. objects. In our laboratory, and in collaboration auditory, and haptic displays; Section 6 is on haptics with Dr Salisbury s group in the MIT Lab, we have across the Internet. Finally, Section 7 discusses the developed computer controlled electromechanical various challenges facing haptics in VE today. devices and the associated software to simulate the feel of different objects. Studies are underway to 2. HUMAN HAPTICS investigate how controlled alterations in visual, 5 Researchers outside the haptic community have
9 Proxy-Based Rendering God object & proxy rendering algorithms Implicit surface representations

10 Haptic Rendering «Tricks» Surface properties Friction Texture Underactuated rendering Device workspace management

11 Collision Detection Intersection tests for primitives Spatial partitioning Bounding volume hierarchies

12 Dynamics Simulation Laws of motion Time integration Mass-spring models Modelling dynamic & deformable bodies

13 Six Degrees of Freedom Penalty force / dynamic proxy methods Constraint-based methods (6-DOF god object)


14 Event-Based Haptics Human vs. device bandwidth Open-loop playback Synthesized and sampled transients

15 A Course Text? We distribute key papers as readings Lin & Otaduy appear to agree with our selection of core topics Text is a collection of many seminal papers Is it mature enough?

16 CHAI 3D
17 Excellent Teaching Aid CHAI3D was developed at Stanford in conjunction with CS 277 Both platform and device agnostic Reduces image/geometry manipulation and graphical rendering burden Can be a double-edged sword!

18 CHAI3D can do a lot... force rendering scene graph graphic rendering universal haptic interface Implements direct rendering, god-object, force shading, friction, surface effects, mesh structures, collision detection, mass-spring simulation, etc.
19 ...but has its drawbacks Can be difficult for someone not versed in objectoriented programming in C++ to ramp up Code internals could be much more pedagogical It already implements most of the concepts we re trying to teach!
20 To use or not to use? One solution is to distribute a reduced CHAI3D Device communication and basic graphics Alternatively, design assignments that exercise key concepts but are not implemented in CHAI3D Can be difficult! (and gets trickier every year...)

21 DESIGNING PEDAGOGICAL EXERCISES FOR HOMEWORK OR LABORATORIES
22 Pedagogical Exercises Use it or lose it! We converged on 1-2 week assignments Covers a good cross-section of haptic rendering Challenge: CHAI3D already has implementations of all the key algorithms! Extensions to CHAI3D?

23 The Novint Falcon A huge boon for teaching our course! Every student takes one home on loan for the quarter Inexpensive and virtually indestructible

24 Potential Fields Force field rendering Experience popthrough problems Attractive fields Identify stability limitations


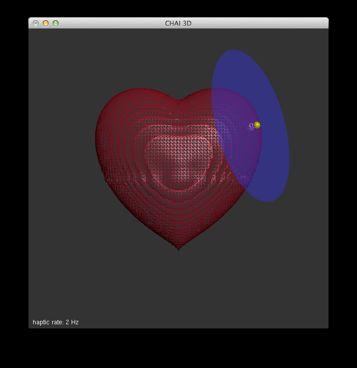
25 Proxy-Based Rendering Implict surface rendering algorithm 3-DOF planar constraint tracking Virtual spring Coulomb friction effect

26 Surface Effects Force shading Barycentric normal interpolation Texture-mapped surface effects Image gradients for normal modulation

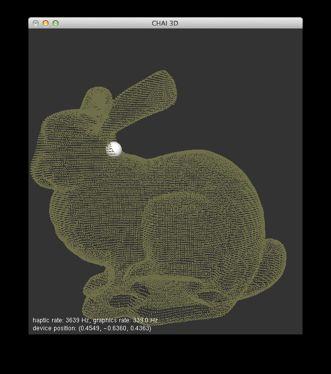
27 Collision Detection Point cloud scene representation Metaball implicit surface k-d Tree to find points within support radius

28 Deformable Objects Mass-spring system Penalty force model Time integration Stiffness vs. stability








29 HAPTIC RENDERING COURSE PROJECTS A SMALL SAMPLE FROM
30 Fair Warning Open-ended projects require extremely heavy guidance from the instructors! Most students learn just enough to get intro trouble, but not enough to get out... This selective sample of excludes many a misguided project
31 Crosscut Saw Simulation JOHN JESSEN

32 Haptic Pottery RIFAT JOYEE NARENDRAN THIAGARAJAN

33 Haptic Toothbrushing SAMMY LONG



34 Lock Picking Simulation DAVID JOHNSON
35 Summary Identified core topics in haptic rendering Discussed use of CHAI3D for teaching Examined pedagogical haptic rendering exercises Reviewed a sample of course projects
36 Thank You! Questions?
CS277 - Experimental Haptics Lecture 2. Haptic Rendering
 CS277 - Experimental Haptics Lecture 2 Haptic Rendering Outline Announcements Human haptic perception Anatomy of a visual-haptic simulation Virtual wall and potential field rendering A note on timing...
CS277 - Experimental Haptics Lecture 2 Haptic Rendering Outline Announcements Human haptic perception Anatomy of a visual-haptic simulation Virtual wall and potential field rendering A note on timing...
Overview of current developments in haptic APIs
 Central European Seminar on Computer Graphics for students, 2011 AUTHOR: Petr Kadleček SUPERVISOR: Petr Kmoch Overview of current developments in haptic APIs Presentation Haptics Haptic programming Haptic
Central European Seminar on Computer Graphics for students, 2011 AUTHOR: Petr Kadleček SUPERVISOR: Petr Kmoch Overview of current developments in haptic APIs Presentation Haptics Haptic programming Haptic
Haptics CS327A
 Haptics CS327A - 217 hap tic adjective relating to the sense of touch or to the perception and manipulation of objects using the senses of touch and proprioception 1 2 Slave Master 3 Courtesy of Walischmiller
Haptics CS327A - 217 hap tic adjective relating to the sense of touch or to the perception and manipulation of objects using the senses of touch and proprioception 1 2 Slave Master 3 Courtesy of Walischmiller
Haptic Rendering CPSC / Sonny Chan University of Calgary
 Haptic Rendering CPSC 599.86 / 601.86 Sonny Chan University of Calgary Today s Outline Announcements Human haptic perception Anatomy of a visual-haptic simulation Virtual wall and potential field rendering
Haptic Rendering CPSC 599.86 / 601.86 Sonny Chan University of Calgary Today s Outline Announcements Human haptic perception Anatomy of a visual-haptic simulation Virtual wall and potential field rendering
2. Introduction to Computer Haptics
 2. Introduction to Computer Haptics Seungmoon Choi, Ph.D. Assistant Professor Dept. of Computer Science and Engineering POSTECH Outline Basics of Force-Feedback Haptic Interfaces Introduction to Computer
2. Introduction to Computer Haptics Seungmoon Choi, Ph.D. Assistant Professor Dept. of Computer Science and Engineering POSTECH Outline Basics of Force-Feedback Haptic Interfaces Introduction to Computer
Touch Feedback in a Head-Mounted Display Virtual Reality through a Kinesthetic Haptic Device
 Touch Feedback in a Head-Mounted Display Virtual Reality through a Kinesthetic Haptic Device Andrew A. Stanley Stanford University Department of Mechanical Engineering astan@stanford.edu Alice X. Wu Stanford
Touch Feedback in a Head-Mounted Display Virtual Reality through a Kinesthetic Haptic Device Andrew A. Stanley Stanford University Department of Mechanical Engineering astan@stanford.edu Alice X. Wu Stanford
The CHAI Libraries. F. Conti, F. Barbagli, R. Balaniuk, M. Halg, C. Lu, D. Morris L. Sentis, E. Vileshin, J. Warren, O. Khatib, K.
 The CHAI Libraries F. Conti, F. Barbagli, R. Balaniuk, M. Halg, C. Lu, D. Morris L. Sentis, E. Vileshin, J. Warren, O. Khatib, K. Salisbury Computer Science Department, Stanford University, Stanford CA
The CHAI Libraries F. Conti, F. Barbagli, R. Balaniuk, M. Halg, C. Lu, D. Morris L. Sentis, E. Vileshin, J. Warren, O. Khatib, K. Salisbury Computer Science Department, Stanford University, Stanford CA
A Movement Based Method for Haptic Interaction
 Spring 2014 Haptics Class Project Paper presented at the University of South Florida, April 30, 2014 A Movement Based Method for Haptic Interaction Matthew Clevenger Abstract An abundance of haptic rendering
Spring 2014 Haptics Class Project Paper presented at the University of South Florida, April 30, 2014 A Movement Based Method for Haptic Interaction Matthew Clevenger Abstract An abundance of haptic rendering
Chapter 2 Introduction to Haptics 2.1 Definition of Haptics
 Chapter 2 Introduction to Haptics 2.1 Definition of Haptics The word haptic originates from the Greek verb hapto to touch and therefore refers to the ability to touch and manipulate objects. The haptic
Chapter 2 Introduction to Haptics 2.1 Definition of Haptics The word haptic originates from the Greek verb hapto to touch and therefore refers to the ability to touch and manipulate objects. The haptic
FORCE FEEDBACK. Roope Raisamo
 FORCE FEEDBACK Roope Raisamo Multimodal Interaction Research Group Tampere Unit for Computer Human Interaction Department of Computer Sciences University of Tampere, Finland Outline Force feedback interfaces
FORCE FEEDBACK Roope Raisamo Multimodal Interaction Research Group Tampere Unit for Computer Human Interaction Department of Computer Sciences University of Tampere, Finland Outline Force feedback interfaces
CS277 - Experimental Haptics Lecture 1. Introduction to Haptics
 CS277 - Experimental Haptics Lecture 1 Introduction to Haptics Haptic Interfaces Enables physical interaction with virtual objects Haptic Rendering Potential Fields Polygonal Meshes Implicit Surfaces Volumetric
CS277 - Experimental Haptics Lecture 1 Introduction to Haptics Haptic Interfaces Enables physical interaction with virtual objects Haptic Rendering Potential Fields Polygonal Meshes Implicit Surfaces Volumetric
PROPRIOCEPTION AND FORCE FEEDBACK
 PROPRIOCEPTION AND FORCE FEEDBACK Roope Raisamo and Jukka Raisamo Multimodal Interaction Research Group Tampere Unit for Computer Human Interaction Department of Computer Sciences University of Tampere,
PROPRIOCEPTION AND FORCE FEEDBACK Roope Raisamo and Jukka Raisamo Multimodal Interaction Research Group Tampere Unit for Computer Human Interaction Department of Computer Sciences University of Tampere,
Force feedback interfaces & applications
 Force feedback interfaces & applications Roope Raisamo Tampere Unit for Computer-Human Interaction (TAUCHI) School of Information Sciences University of Tampere, Finland Based on material by Jukka Raisamo,
Force feedback interfaces & applications Roope Raisamo Tampere Unit for Computer-Human Interaction (TAUCHI) School of Information Sciences University of Tampere, Finland Based on material by Jukka Raisamo,
Friction & Workspaces
 Friction & Workspaces CPSC 599.86 / 601.86 Sonny Chan University of Calgary Today s Agenda Rendering surfaces with friction Exploring large virtual environments using devices with limited workspace [From
Friction & Workspaces CPSC 599.86 / 601.86 Sonny Chan University of Calgary Today s Agenda Rendering surfaces with friction Exploring large virtual environments using devices with limited workspace [From
Development Scheme of JewelSense: Haptic-based Sculpting Tool for Jewelry Design
 Development Scheme of JewelSense: Haptic-based Sculpting Tool for Jewelry Design S. Wannarumon Kielarova Department of Industrial Engineering, Naresuan University, Phitsanulok 65000 * Corresponding Author
Development Scheme of JewelSense: Haptic-based Sculpting Tool for Jewelry Design S. Wannarumon Kielarova Department of Industrial Engineering, Naresuan University, Phitsanulok 65000 * Corresponding Author
Technologies. Philippe Fuchs Ecole des Mines, ParisTech, Paris, France. Virtual Reality: Concepts and. Guillaume Moreau.
 Virtual Reality: Concepts and Technologies Editors Philippe Fuchs Ecole des Mines, ParisTech, Paris, France Guillaume Moreau Ecole Centrale de Nantes, CERMA, Nantes, France Pascal Guitton INRIA, University
Virtual Reality: Concepts and Technologies Editors Philippe Fuchs Ecole des Mines, ParisTech, Paris, France Guillaume Moreau Ecole Centrale de Nantes, CERMA, Nantes, France Pascal Guitton INRIA, University
CS277 - Experimental Haptics Lecture 9a. Course Projects, Past & Present
 CS277 - Experimental Haptics Lecture 9a Course Projects, Past & Present Course Project Requirements Final project is worth 40% (40 points) - Project proposal (5 points) - May 6th - Project milestone/presentation
CS277 - Experimental Haptics Lecture 9a Course Projects, Past & Present Course Project Requirements Final project is worth 40% (40 points) - Project proposal (5 points) - May 6th - Project milestone/presentation
Peter Berkelman. ACHI/DigitalWorld
 Magnetic Levitation Haptic Peter Berkelman ACHI/DigitalWorld February 25, 2013 Outline: Haptics - Force Feedback Sample devices: Phantoms, Novint Falcon, Force Dimension Inertia, friction, hysteresis/backlash
Magnetic Levitation Haptic Peter Berkelman ACHI/DigitalWorld February 25, 2013 Outline: Haptics - Force Feedback Sample devices: Phantoms, Novint Falcon, Force Dimension Inertia, friction, hysteresis/backlash
Development of K-Touch TM Haptic API for Various Datasets
 Development of K-Touch TM Haptic API for Various Datasets Beom-Chan Lee 1 Jong-Phil Kim 2 Jongeun Cha 3 Jeha Ryu 4 ABSTRACT This paper presents development of a new haptic API (Application Programming
Development of K-Touch TM Haptic API for Various Datasets Beom-Chan Lee 1 Jong-Phil Kim 2 Jongeun Cha 3 Jeha Ryu 4 ABSTRACT This paper presents development of a new haptic API (Application Programming
Virtual Experiments as a Tool for Active Engagement
 Virtual Experiments as a Tool for Active Engagement Lei Bao Stephen Stonebraker Gyoungho Lee Physics Education Research Group Department of Physics The Ohio State University Context Cues and Knowledge
Virtual Experiments as a Tool for Active Engagement Lei Bao Stephen Stonebraker Gyoungho Lee Physics Education Research Group Department of Physics The Ohio State University Context Cues and Knowledge
Computer Haptics and Applications
 Computer Haptics and Applications EURON Summer School 2003 Cagatay Basdogan, Ph.D. College of Engineering Koc University, Istanbul, 80910 (http://network.ku.edu.tr/~cbasdogan) Resources: EURON Summer School
Computer Haptics and Applications EURON Summer School 2003 Cagatay Basdogan, Ph.D. College of Engineering Koc University, Istanbul, 80910 (http://network.ku.edu.tr/~cbasdogan) Resources: EURON Summer School
Haptic presentation of 3D objects in virtual reality for the visually disabled
 Haptic presentation of 3D objects in virtual reality for the visually disabled M Moranski, A Materka Institute of Electronics, Technical University of Lodz, Wolczanska 211/215, Lodz, POLAND marcin.moranski@p.lodz.pl,
Haptic presentation of 3D objects in virtual reality for the visually disabled M Moranski, A Materka Institute of Electronics, Technical University of Lodz, Wolczanska 211/215, Lodz, POLAND marcin.moranski@p.lodz.pl,
CSE 165: 3D User Interaction. Lecture #11: Travel
 CSE 165: 3D User Interaction Lecture #11: Travel 2 Announcements Homework 3 is on-line, due next Friday Media Teaching Lab has Merge VR viewers to borrow for cell phone based VR http://acms.ucsd.edu/students/medialab/equipment
CSE 165: 3D User Interaction Lecture #11: Travel 2 Announcements Homework 3 is on-line, due next Friday Media Teaching Lab has Merge VR viewers to borrow for cell phone based VR http://acms.ucsd.edu/students/medialab/equipment
HAPTIC GUIDANCE BASED ON HARMONIC FUNCTIONS FOR THE EXECUTION OF TELEOPERATED ASSEMBLY TASKS. Carlos Vázquez Jan Rosell,1
 Preprints of IAD' 2007: IFAC WORKSHOP ON INTELLIGENT ASSEMBLY AND DISASSEMBLY May 23-25 2007, Alicante, Spain HAPTIC GUIDANCE BASED ON HARMONIC FUNCTIONS FOR THE EXECUTION OF TELEOPERATED ASSEMBLY TASKS
Preprints of IAD' 2007: IFAC WORKSHOP ON INTELLIGENT ASSEMBLY AND DISASSEMBLY May 23-25 2007, Alicante, Spain HAPTIC GUIDANCE BASED ON HARMONIC FUNCTIONS FOR THE EXECUTION OF TELEOPERATED ASSEMBLY TASKS
Haptic Rendering: Introductory Concepts
 Rendering: Introductory Concepts Human operator Video and audio device Audio-visual rendering rendering Kenneth Salisbury and Francois Conti Stanford University Federico Barbagli Stanford University and
Rendering: Introductory Concepts Human operator Video and audio device Audio-visual rendering rendering Kenneth Salisbury and Francois Conti Stanford University Federico Barbagli Stanford University and
Haptic Rendering of Large-Scale VEs
 Haptic Rendering of Large-Scale VEs Dr. Mashhuda Glencross and Prof. Roger Hubbold Manchester University (UK) EPSRC Grant: GR/S23087/0 Perceiving the Sense of Touch Important considerations: Burdea: Haptic
Haptic Rendering of Large-Scale VEs Dr. Mashhuda Glencross and Prof. Roger Hubbold Manchester University (UK) EPSRC Grant: GR/S23087/0 Perceiving the Sense of Touch Important considerations: Burdea: Haptic
Performance Issues in Collaborative Haptic Training
 27 IEEE International Conference on Robotics and Automation Roma, Italy, 1-14 April 27 FrA4.4 Performance Issues in Collaborative Haptic Training Behzad Khademian and Keyvan Hashtrudi-Zaad Abstract This
27 IEEE International Conference on Robotics and Automation Roma, Italy, 1-14 April 27 FrA4.4 Performance Issues in Collaborative Haptic Training Behzad Khademian and Keyvan Hashtrudi-Zaad Abstract This
3D interaction techniques in Virtual Reality Applications for Engineering Education
 3D interaction techniques in Virtual Reality Applications for Engineering Education Cristian Dudulean 1, Ionel Stareţu 2 (1) Industrial Highschool Rosenau, Romania E-mail: duduleanc@yahoo.com (2) Transylvania
3D interaction techniques in Virtual Reality Applications for Engineering Education Cristian Dudulean 1, Ionel Stareţu 2 (1) Industrial Highschool Rosenau, Romania E-mail: duduleanc@yahoo.com (2) Transylvania
Multimodal Virtual Environments: MAGIC Toolkit and Visual-Haptic Interaction Paradigms. I-Chun Alexandra Hou
 Multimodal Virtual Environments: MAGIC Toolkit and Visual-Haptic Interaction Paradigms by I-Chun Alexandra Hou B.S., Mechanical Engineering (1995) Massachusetts Institute of Technology Submitted to the
Multimodal Virtual Environments: MAGIC Toolkit and Visual-Haptic Interaction Paradigms by I-Chun Alexandra Hou B.S., Mechanical Engineering (1995) Massachusetts Institute of Technology Submitted to the
Stable Haptic Rendering in Virtual Environment
 Stable Haptic Rendering in Virtual Environment Hou Xiyuan School of Electrical & Electronic Engineering A thesis submitted to the Nanyang Technological University in partial fulfillment of the requirement
Stable Haptic Rendering in Virtual Environment Hou Xiyuan School of Electrical & Electronic Engineering A thesis submitted to the Nanyang Technological University in partial fulfillment of the requirement
Cody Narber, M.S. Department of Computer Science, George Mason University
 Cody Narber, M.S. cnarber@gmu.edu Department of Computer Science, George Mason University Lynn Gerber, MD Professor, College of Health and Human Services Director, Center for the Study of Chronic Illness
Cody Narber, M.S. cnarber@gmu.edu Department of Computer Science, George Mason University Lynn Gerber, MD Professor, College of Health and Human Services Director, Center for the Study of Chronic Illness
Discrimination of Virtual Haptic Textures Rendered with Different Update Rates
 Discrimination of Virtual Haptic Textures Rendered with Different Update Rates Seungmoon Choi and Hong Z. Tan Haptic Interface Research Laboratory Purdue University 465 Northwestern Avenue West Lafayette,
Discrimination of Virtual Haptic Textures Rendered with Different Update Rates Seungmoon Choi and Hong Z. Tan Haptic Interface Research Laboratory Purdue University 465 Northwestern Avenue West Lafayette,
The Effect of Haptic Degrees of Freedom on Task Performance in Virtual Surgical Environments
 The Effect of Haptic Degrees of Freedom on Task Performance in Virtual Surgical Environments Jonas FORSSLUND a,1, Sonny CHAN a,1, Joshua SELESNICK b, Kenneth SALISBURY a,c, Rebeka G. SILVA d, and Nikolas
The Effect of Haptic Degrees of Freedom on Task Performance in Virtual Surgical Environments Jonas FORSSLUND a,1, Sonny CHAN a,1, Joshua SELESNICK b, Kenneth SALISBURY a,c, Rebeka G. SILVA d, and Nikolas
Lecture 1: Introduction to haptics and Kinesthetic haptic devices
 ME 327: Design and Control of Haptic Systems Winter 2018 Lecture 1: Introduction to haptics and Kinesthetic haptic devices Allison M. Okamura Stanford University today s objectives introduce you to the
ME 327: Design and Control of Haptic Systems Winter 2018 Lecture 1: Introduction to haptics and Kinesthetic haptic devices Allison M. Okamura Stanford University today s objectives introduce you to the
Multi-Rate Multi-Range Dynamic Simulation for Haptic Interaction
 Multi-Rate Multi-Range Dynamic Simulation for Haptic Interaction Ikumi Susa Makoto Sato Shoichi Hasegawa Tokyo Institute of Technology ABSTRACT In this paper, we propose a technique for a high quality
Multi-Rate Multi-Range Dynamic Simulation for Haptic Interaction Ikumi Susa Makoto Sato Shoichi Hasegawa Tokyo Institute of Technology ABSTRACT In this paper, we propose a technique for a high quality
Visual - Haptic Interactions in Multimodal Virtual Environments
 Visual - Haptic Interactions in Multimodal Virtual Environments by Wan-Chen Wu B.S., Mechanical Engineering National Taiwan University, 1996 Submitted to the Department of Mechanical Engineering in partial
Visual - Haptic Interactions in Multimodal Virtual Environments by Wan-Chen Wu B.S., Mechanical Engineering National Taiwan University, 1996 Submitted to the Department of Mechanical Engineering in partial
Force display using a hybrid haptic device composed of motors and brakes
 Mechatronics 16 (26) 249 257 Force display using a hybrid haptic device composed of motors and brakes Tae-Bum Kwon, Jae-Bok Song * Department of Mechanical Engineering, Korea University, 5, Anam-Dong,
Mechatronics 16 (26) 249 257 Force display using a hybrid haptic device composed of motors and brakes Tae-Bum Kwon, Jae-Bok Song * Department of Mechanical Engineering, Korea University, 5, Anam-Dong,
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute Use an example to explain what is admittance control? You may refer to exoskeleton
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute Use an example to explain what is admittance control? You may refer to exoskeleton
Haptic interaction. Ruth Aylett
 Haptic interaction Ruth Aylett Contents Haptic definition Haptic model Haptic devices Measuring forces Haptic Technologies Haptics refers to manual interactions with environments, such as sensorial exploration
Haptic interaction Ruth Aylett Contents Haptic definition Haptic model Haptic devices Measuring forces Haptic Technologies Haptics refers to manual interactions with environments, such as sensorial exploration
Lab 4: Creating Your Own Device Class
 Department of Mechanical Engineering ME EN 7960 - Haptics Lab 4: Creating Your Own Device Class Out: Thursday 2/24/2011 Due: Thursday 3/8/2011 by class time Please read this entire document before starting
Department of Mechanical Engineering ME EN 7960 - Haptics Lab 4: Creating Your Own Device Class Out: Thursday 2/24/2011 Due: Thursday 3/8/2011 by class time Please read this entire document before starting
IN virtual reality (VR) technology, haptic interface
 technology, haptic interface") 1 Real-time Adaptive Prediction Method for Smooth Haptic Rendering Xiyuan Hou, Olga Sourina, arxiv:1603.06674v1 [cs.hc] 22 Mar 2016 Abstract In this paper, we propose a real-time adaptive prediction method
1 Real-time Adaptive Prediction Method for Smooth Haptic Rendering Xiyuan Hou, Olga Sourina, arxiv:1603.06674v1 [cs.hc] 22 Mar 2016 Abstract In this paper, we propose a real-time adaptive prediction method
A Hybrid Actuation Approach for Haptic Devices
 A Hybrid Actuation Approach for Haptic Devices François Conti conti@ai.stanford.edu Oussama Khatib ok@ai.stanford.edu Charles Baur charles.baur@epfl.ch Robotics Laboratory Computer Science Department Stanford
A Hybrid Actuation Approach for Haptic Devices François Conti conti@ai.stanford.edu Oussama Khatib ok@ai.stanford.edu Charles Baur charles.baur@epfl.ch Robotics Laboratory Computer Science Department Stanford
Booklet of teaching units
 International Master Program in Mechatronic Systems for Rehabilitation Booklet of teaching units Third semester (M2 S1) Master Sciences de l Ingénieur Université Pierre et Marie Curie Paris 6 Boite 164,
International Master Program in Mechatronic Systems for Rehabilitation Booklet of teaching units Third semester (M2 S1) Master Sciences de l Ingénieur Université Pierre et Marie Curie Paris 6 Boite 164,
Rendering detailed haptic textures
 Workshop On Virtual Reality Interaction and Physical Simulation (2005) F. Ganovelli and C. Mendoza (Editors) Rendering detailed haptic textures Submission id: 45 Abstract Rendering haptic textures seamlessly
Workshop On Virtual Reality Interaction and Physical Simulation (2005) F. Ganovelli and C. Mendoza (Editors) Rendering detailed haptic textures Submission id: 45 Abstract Rendering haptic textures seamlessly
Modeling and Experimental Studies of a Novel 6DOF Haptic Device
 Proceedings of The Canadian Society for Mechanical Engineering Forum 2010 CSME FORUM 2010 June 7-9, 2010, Victoria, British Columbia, Canada Modeling and Experimental Studies of a Novel DOF Haptic Device
Proceedings of The Canadian Society for Mechanical Engineering Forum 2010 CSME FORUM 2010 June 7-9, 2010, Victoria, British Columbia, Canada Modeling and Experimental Studies of a Novel DOF Haptic Device
Fuzzy Logic Based Force-Feedback for Obstacle Collision Avoidance of Robot Manipulators
 Fuzzy Logic Based Force-Feedback for Obstacle Collision Avoidance of Robot Manipulators D. Wijayasekara, M. Manic Department of Computer Science University of Idaho Idaho Falls, USA wija2589@vandals.uidaho.edu,
Fuzzy Logic Based Force-Feedback for Obstacle Collision Avoidance of Robot Manipulators D. Wijayasekara, M. Manic Department of Computer Science University of Idaho Idaho Falls, USA wija2589@vandals.uidaho.edu,
Constraint-Based Haptic Rendering of Point Data for Teleoperated Robot Grasping
 Constraint-Based Haptic Rendering of Point Data for Teleoperated Robot Grasping Adam Leeper Department of Mechanical Engineering Stanford University Sonny Chan Department of Computer Science Stanford University
Constraint-Based Haptic Rendering of Point Data for Teleoperated Robot Grasping Adam Leeper Department of Mechanical Engineering Stanford University Sonny Chan Department of Computer Science Stanford University
Haptic Rendering: Introductory Concepts
 Haptic Rendering: Introductory Concepts Kenneth Salisbury, Federico Barbagli, Francois Conti Stanford Robotics Lab - Stanford University - Stanford, CA, U.S.A. Dipartimento di Inegneria dell Informazione
Haptic Rendering: Introductory Concepts Kenneth Salisbury, Federico Barbagli, Francois Conti Stanford Robotics Lab - Stanford University - Stanford, CA, U.S.A. Dipartimento di Inegneria dell Informazione
Haplug: A Haptic Plug for Dynamic VR Interactions
 Haplug: A Haptic Plug for Dynamic VR Interactions Nobuhisa Hanamitsu *, Ali Israr Disney Research, USA nobuhisa.hanamitsu@disneyresearch.com Abstract. We demonstrate applications of a new actuator, the
Haplug: A Haptic Plug for Dynamic VR Interactions Nobuhisa Hanamitsu *, Ali Israr Disney Research, USA nobuhisa.hanamitsu@disneyresearch.com Abstract. We demonstrate applications of a new actuator, the
Easy Robot Programming for Industrial Manipulators by Manual Volume Sweeping
 Easy Robot Programming for Industrial Manipulators by Manual Volume Sweeping *Yusuke MAEDA, Tatsuya USHIODA and Satoshi MAKITA (Yokohama National University) MAEDA Lab INTELLIGENT & INDUSTRIAL ROBOTICS
Easy Robot Programming for Industrial Manipulators by Manual Volume Sweeping *Yusuke MAEDA, Tatsuya USHIODA and Satoshi MAKITA (Yokohama National University) MAEDA Lab INTELLIGENT & INDUSTRIAL ROBOTICS
Vocational Education Technology: Rural India
 Vocational Education Technology: Rural India Bhavani B. Amrita Vishwa Vidyapeetham School of Engineering Amritapuri, India bhavani@amritapuri.edu Srividya Sheshadri Amrita Vishwa Vidyapeetham School of
Vocational Education Technology: Rural India Bhavani B. Amrita Vishwa Vidyapeetham School of Engineering Amritapuri, India bhavani@amritapuri.edu Srividya Sheshadri Amrita Vishwa Vidyapeetham School of
Prospective Teleautonomy For EOD Operations
 Perception and task guidance Perceived world model & intent Prospective Teleautonomy For EOD Operations Prof. Seth Teller Electrical Engineering and Computer Science Department Computer Science and Artificial
Perception and task guidance Perceived world model & intent Prospective Teleautonomy For EOD Operations Prof. Seth Teller Electrical Engineering and Computer Science Department Computer Science and Artificial
Haptics ME7960, Sect. 007 Lect. 6: Device Design I
 Haptics ME7960, Sect. 007 Lect. 6: Device Design I Spring 2009 Prof. William Provancher Prof. Jake Abbott University of Utah Salt Lake City, UT USA Today s Class Haptic Device Review (be sure to review
Haptics ME7960, Sect. 007 Lect. 6: Device Design I Spring 2009 Prof. William Provancher Prof. Jake Abbott University of Utah Salt Lake City, UT USA Today s Class Haptic Device Review (be sure to review
Haptic interaction. Ruth Aylett
 Haptic interaction Ruth Aylett Contents Haptic definition Haptic model Haptic devices Measuring forces Haptic Technologies Haptics refers to manual interactions with environments, such as sensorial exploration
Haptic interaction Ruth Aylett Contents Haptic definition Haptic model Haptic devices Measuring forces Haptic Technologies Haptics refers to manual interactions with environments, such as sensorial exploration
College Park, MD 20742, USA virtual environments. To enable haptic rendering of large datasets we
 Continuously-Adaptive Haptic Rendering Jihad El-Sana 1 and Amitabh Varshney 2 1 Department of Computer Science, Ben-Gurion University, Beer-Sheva, 84105, Israel jihad@cs.bgu.ac.il 2 Department of Computer
Continuously-Adaptive Haptic Rendering Jihad El-Sana 1 and Amitabh Varshney 2 1 Department of Computer Science, Ben-Gurion University, Beer-Sheva, 84105, Israel jihad@cs.bgu.ac.il 2 Department of Computer
5HDO 7LPH 6XUJLFDO 6LPXODWLRQ ZLWK +DSWLF 6HQVDWLRQ DV &ROODERUDWHG :RUNV EHWZHHQ -DSDQ DQG *HUPDQ\
 nsuzuki@jikei.ac.jp 1016 N. Suzuki et al. 1). The system should provide a design for the user and determine surgical procedures based on 3D model reconstructed from the patient's data. 2). The system must
nsuzuki@jikei.ac.jp 1016 N. Suzuki et al. 1). The system should provide a design for the user and determine surgical procedures based on 3D model reconstructed from the patient's data. 2). The system must
Virtual Environments. Ruth Aylett
 Virtual Environments Ruth Aylett Aims of the course 1. To demonstrate a critical understanding of modern VE systems, evaluating the strengths and weaknesses of the current VR technologies 2. To be able
Virtual Environments Ruth Aylett Aims of the course 1. To demonstrate a critical understanding of modern VE systems, evaluating the strengths and weaknesses of the current VR technologies 2. To be able
On Application of Virtual Fixtures as an Aid for Telemanipulation and Training
 On Application of Virtual Fixtures as an Aid for Telemanipulation and Training Shahram Payandeh and Zoran Stanisic Experimental Robotics Laboratory (ERL) School of Engineering Science Simon Fraser University
On Application of Virtual Fixtures as an Aid for Telemanipulation and Training Shahram Payandeh and Zoran Stanisic Experimental Robotics Laboratory (ERL) School of Engineering Science Simon Fraser University
Lecture 6: Kinesthetic haptic devices: Control
 ME 327: Design and Control of Haptic Systems Autumn 2018 Lecture 6: Kinesthetic haptic devices: Control Allison M. Okamura Stanford University important stability concepts instability / limit cycle oscillation
ME 327: Design and Control of Haptic Systems Autumn 2018 Lecture 6: Kinesthetic haptic devices: Control Allison M. Okamura Stanford University important stability concepts instability / limit cycle oscillation
Multimodal Virtual Environments: MAGIC Toolkit and Visual-Haptic Interaction Paradigms
 Touch Lab Report 8 Multimodal Virtual Environments: MAGC Toolkit and Visual-Haptic nteraction Paradigms -Chun Alexandra Hou and Mandayam A. Srinivasan RLE Technical Report No. 620 January 1998 Sponsored
Touch Lab Report 8 Multimodal Virtual Environments: MAGC Toolkit and Visual-Haptic nteraction Paradigms -Chun Alexandra Hou and Mandayam A. Srinivasan RLE Technical Report No. 620 January 1998 Sponsored
International Journal of Advanced Research in Computer Science and Software Engineering
 Volume 3, Issue 3, March 2013 ISSN: 2277 128X International Journal of Advanced Research in Computer Science and Software Engineering Research Paper Available online at: www.ijarcsse.com A Study on SensAble
Volume 3, Issue 3, March 2013 ISSN: 2277 128X International Journal of Advanced Research in Computer Science and Software Engineering Research Paper Available online at: www.ijarcsse.com A Study on SensAble
MEAM 520. Haptic Rendering and Teleoperation
 MEAM 520 Haptic Rendering and Teleoperation Katherine J. Kuchenbecker, Ph.D. General Robotics, Automation, Sensing, and Perception Lab (GRASP) MEAM Department, SEAS, University of Pennsylvania Lecture
MEAM 520 Haptic Rendering and Teleoperation Katherine J. Kuchenbecker, Ph.D. General Robotics, Automation, Sensing, and Perception Lab (GRASP) MEAM Department, SEAS, University of Pennsylvania Lecture
Exploring Haptics in Digital Waveguide Instruments
 Exploring Haptics in Digital Waveguide Instruments 1 Introduction... 1 2 Factors concerning Haptic Instruments... 2 2.1 Open and Closed Loop Systems... 2 2.2 Sampling Rate of the Control Loop... 2 3 An
Exploring Haptics in Digital Waveguide Instruments 1 Introduction... 1 2 Factors concerning Haptic Instruments... 2 2.1 Open and Closed Loop Systems... 2 2.2 Sampling Rate of the Control Loop... 2 3 An
Networked haptic cooperation using remote dynamic proxies
 29 Second International Conferences on Advances in Computer-Human Interactions Networked haptic cooperation using remote dynamic proxies Zhi Li Department of Mechanical Engineering University of Victoria
29 Second International Conferences on Advances in Computer-Human Interactions Networked haptic cooperation using remote dynamic proxies Zhi Li Department of Mechanical Engineering University of Victoria
Elements of Haptic Interfaces
 Elements of Haptic Interfaces Katherine J. Kuchenbecker Department of Mechanical Engineering and Applied Mechanics University of Pennsylvania kuchenbe@seas.upenn.edu Course Notes for MEAM 625, University
Elements of Haptic Interfaces Katherine J. Kuchenbecker Department of Mechanical Engineering and Applied Mechanics University of Pennsylvania kuchenbe@seas.upenn.edu Course Notes for MEAM 625, University
Robust Haptic Teleoperation of a Mobile Manipulation Platform
 Robust Haptic Teleoperation of a Mobile Manipulation Platform Jaeheung Park and Oussama Khatib Stanford AI Laboratory Stanford University http://robotics.stanford.edu Abstract. This paper presents a new
Robust Haptic Teleoperation of a Mobile Manipulation Platform Jaeheung Park and Oussama Khatib Stanford AI Laboratory Stanford University http://robotics.stanford.edu Abstract. This paper presents a new
We are IntechOpen, the world s leading publisher of Open Access books Built by scientists, for scientists. International authors and editors
 We are IntechOpen, the world s leading publisher of Open Access books Built by scientists, for scientists 3,800 116,000 120M Open access books available International authors and editors Downloads Our
We are IntechOpen, the world s leading publisher of Open Access books Built by scientists, for scientists 3,800 116,000 120M Open access books available International authors and editors Downloads Our
Individual Test Item Specifications
 Individual Test Item Specifications 8208110 Game and Simulation Foundations 2015 The contents of this document were developed under a grant from the United States Department of Education. However, the
Individual Test Item Specifications 8208110 Game and Simulation Foundations 2015 The contents of this document were developed under a grant from the United States Department of Education. However, the
Using Simple Force Feedback Mechanisms as Haptic Visualization Tools.
 Using Simple Force Feedback Mechanisms as Haptic Visualization Tools. Anders J Johansson, Joakim Linde Teiresias Research Group (www.bigfoot.com/~teiresias) Abstract Force feedback (FF) is a technology
Using Simple Force Feedback Mechanisms as Haptic Visualization Tools. Anders J Johansson, Joakim Linde Teiresias Research Group (www.bigfoot.com/~teiresias) Abstract Force feedback (FF) is a technology
HAPTIC DEVICES FOR DESKTOP VIRTUAL PROTOTYPING APPLICATIONS
 The 3rd International Conference on Computational Mechanics and Virtual Engineering COMEC 2009 29 30 OCTOBER 2009, Brasov, Romania HAPTIC DEVICES FOR DESKTOP VIRTUAL PROTOTYPING APPLICATIONS A. Fratu 1,
The 3rd International Conference on Computational Mechanics and Virtual Engineering COMEC 2009 29 30 OCTOBER 2009, Brasov, Romania HAPTIC DEVICES FOR DESKTOP VIRTUAL PROTOTYPING APPLICATIONS A. Fratu 1,
Large Workspace Haptic Devices - A New Actuation Approach
 Large Workspace Haptic Devices - A New Actuation Approach Michael Zinn Department of Mechanical Engineering University of Wisconsin - Madison Oussama Khatib Robotics Laboratory Department of Computer Science
Large Workspace Haptic Devices - A New Actuation Approach Michael Zinn Department of Mechanical Engineering University of Wisconsin - Madison Oussama Khatib Robotics Laboratory Department of Computer Science
The 5th International Conference on the Advanced Mechatronics(ICAM2010) Research Issues on Mobile Haptic Interface for Large Virtual Environments Seun
 Research Issues on Mobile Haptic Interface for Large Virtual Environments Seun") The 5th International Conference on the Advanced Mechatronics(ICAM2010) Research Issues on Mobile Haptic Interface for Large Virtual Environments Seungmoon Choi and In Lee Haptics and Virtual Reality Laboratory
The 5th International Conference on the Advanced Mechatronics(ICAM2010) Research Issues on Mobile Haptic Interface for Large Virtual Environments Seungmoon Choi and In Lee Haptics and Virtual Reality Laboratory
MEAM 520. Haptic Rendering and Teleoperation
 MEAM 520 Haptic Rendering and Teleoperation Katherine J. Kuchenbecker, Ph.D. General Robotics, Automation, Sensing, and Perception Lab (GRASP) MEAM Department, SEAS, University of Pennsylvania Lecture
MEAM 520 Haptic Rendering and Teleoperation Katherine J. Kuchenbecker, Ph.D. General Robotics, Automation, Sensing, and Perception Lab (GRASP) MEAM Department, SEAS, University of Pennsylvania Lecture
Advanced Robotics and Intelligent Control Avancerad robotik och intelligenta styrsystem
 Advanced Robotics and Intelligent Control Avancerad robotik och intelligenta styrsystem ELAD16 Associate Professor (Docent) KARLSTAD UNIVERSITY Faculty of Technology and Science Department of Physics and
Advanced Robotics and Intelligent Control Avancerad robotik och intelligenta styrsystem ELAD16 Associate Professor (Docent) KARLSTAD UNIVERSITY Faculty of Technology and Science Department of Physics and
MECHANICAL DESIGN LEARNING ENVIRONMENTS BASED ON VIRTUAL REALITY TECHNOLOGIES
 INTERNATIONAL CONFERENCE ON ENGINEERING AND PRODUCT DESIGN EDUCATION 4 & 5 SEPTEMBER 2008, UNIVERSITAT POLITECNICA DE CATALUNYA, BARCELONA, SPAIN MECHANICAL DESIGN LEARNING ENVIRONMENTS BASED ON VIRTUAL
INTERNATIONAL CONFERENCE ON ENGINEERING AND PRODUCT DESIGN EDUCATION 4 & 5 SEPTEMBER 2008, UNIVERSITAT POLITECNICA DE CATALUNYA, BARCELONA, SPAIN MECHANICAL DESIGN LEARNING ENVIRONMENTS BASED ON VIRTUAL
Craig Barnes. Previous Work. Introduction. Tools for Programming Agents
 From: AAAI Technical Report SS-00-04. Compilation copyright 2000, AAAI (www.aaai.org). All rights reserved. Visual Programming Agents for Virtual Environments Craig Barnes Electronic Visualization Lab
From: AAAI Technical Report SS-00-04. Compilation copyright 2000, AAAI (www.aaai.org). All rights reserved. Visual Programming Agents for Virtual Environments Craig Barnes Electronic Visualization Lab
An Experimental Study of the Limitations of Mobile Haptic Interfaces
 An Experimental Study of the Limitations of Mobile Haptic Interfaces F. Barbagli 1,2, A. Formaglio 1, M. Franzini 1, A. Giannitrapani 1, and D. Prattichizzo 1 (1) Dipartimento di Ingegneria dell Informazione,
An Experimental Study of the Limitations of Mobile Haptic Interfaces F. Barbagli 1,2, A. Formaglio 1, M. Franzini 1, A. Giannitrapani 1, and D. Prattichizzo 1 (1) Dipartimento di Ingegneria dell Informazione,
NEW YORK STATE TEACHER CERTIFICATION EXAMINATIONS
 NEW YORK STATE TEACHER CERTIFICATION EXAMINATIONS TEST DESIGN AND FRAMEWORK June 2018 Authorized for Distribution by the New York State Education Department This test design and framework document is designed
NEW YORK STATE TEACHER CERTIFICATION EXAMINATIONS TEST DESIGN AND FRAMEWORK June 2018 Authorized for Distribution by the New York State Education Department This test design and framework document is designed
On the Integration of Tactile and Force Feedback
 3 On the Integration of Tactile and Force Feedback Marco Fontana, Emanuele Ruffaldi, Fabio Salasedo and Massimo Bergamasco PERCRO Laboratory - Scuola Superiore Sant Anna, Italy 1. Introduction Haptic interfaces
3 On the Integration of Tactile and Force Feedback Marco Fontana, Emanuele Ruffaldi, Fabio Salasedo and Massimo Bergamasco PERCRO Laboratory - Scuola Superiore Sant Anna, Italy 1. Introduction Haptic interfaces
Digitalisation as day-to-day-business
 Digitalisation as day-to-day-business What is today feasible for the company in the future Prof. Jivka Ovtcharova INSTITUTE FOR INFORMATION MANAGEMENT IN ENGINEERING Baden-Württemberg Driving force for
Digitalisation as day-to-day-business What is today feasible for the company in the future Prof. Jivka Ovtcharova INSTITUTE FOR INFORMATION MANAGEMENT IN ENGINEERING Baden-Württemberg Driving force for
Laboratory Mini-Projects Summary
 ME 4290/5290 Mechanics & Control of Robotic Manipulators Dr. Bob, Fall 2017 Robotics Laboratory Mini-Projects (LMP 1 8) Laboratory Exercises: The laboratory exercises are to be done in teams of two (or
ME 4290/5290 Mechanics & Control of Robotic Manipulators Dr. Bob, Fall 2017 Robotics Laboratory Mini-Projects (LMP 1 8) Laboratory Exercises: The laboratory exercises are to be done in teams of two (or
CIS Honours Minor Thesis. Research Proposal Hybrid User Interfaces in Visuo-Haptic Augmented Reality
 CIS Honours Minor Thesis Research Proposal Hybrid User Interfaces in Visuo-Haptic Augmented Reality Student: Degree: Supervisor: Ulrich Eck LHIS Dr. Christian Sandor Abstract In 1965, Ivan Sutherland envisioned
CIS Honours Minor Thesis Research Proposal Hybrid User Interfaces in Visuo-Haptic Augmented Reality Student: Degree: Supervisor: Ulrich Eck LHIS Dr. Christian Sandor Abstract In 1965, Ivan Sutherland envisioned
Large Workspace Haptic Devices - A New Actuation Approach
 Large Workspace Haptic Devices - A New Actuation Approach Michael Zinn Department of Mechanical Engineering University of Wisconsin - Madison Oussama Khatib Robotics Laboratory Department of Computer Science
Large Workspace Haptic Devices - A New Actuation Approach Michael Zinn Department of Mechanical Engineering University of Wisconsin - Madison Oussama Khatib Robotics Laboratory Department of Computer Science
Laboratory Assignment 2 Signal Sampling, Manipulation, and Playback
 Laboratory Assignment 2 Signal Sampling, Manipulation, and Playback PURPOSE This lab will introduce you to the laboratory equipment and the software that allows you to link your computer to the hardware.
Laboratory Assignment 2 Signal Sampling, Manipulation, and Playback PURPOSE This lab will introduce you to the laboratory equipment and the software that allows you to link your computer to the hardware.
Beyond Visual: Shape, Haptics and Actuation in 3D UI
 Beyond Visual: Shape, Haptics and Actuation in 3D UI Ivan Poupyrev Welcome, Introduction, & Roadmap 3D UIs 101 3D UIs 201 User Studies and 3D UIs Guidelines for Developing 3D UIs Video Games: 3D UIs for
Beyond Visual: Shape, Haptics and Actuation in 3D UI Ivan Poupyrev Welcome, Introduction, & Roadmap 3D UIs 101 3D UIs 201 User Studies and 3D UIs Guidelines for Developing 3D UIs Video Games: 3D UIs for
AHAPTIC interface is a kinesthetic link between a human
 IEEE TRANSACTIONS ON CONTROL SYSTEMS TECHNOLOGY, VOL. 13, NO. 5, SEPTEMBER 2005 737 Time Domain Passivity Control With Reference Energy Following Jee-Hwan Ryu, Carsten Preusche, Blake Hannaford, and Gerd
IEEE TRANSACTIONS ON CONTROL SYSTEMS TECHNOLOGY, VOL. 13, NO. 5, SEPTEMBER 2005 737 Time Domain Passivity Control With Reference Energy Following Jee-Hwan Ryu, Carsten Preusche, Blake Hannaford, and Gerd
Decomposing the Performance of Admittance and Series Elastic Haptic Rendering Architectures
 Decomposing the Performance of Admittance and Series Elastic Haptic Rendering Architectures Emma Treadway 1, Yi Yang 1, and R. Brent Gillespie 1 Abstract In this paper, we explore certain tradeoffs in
Decomposing the Performance of Admittance and Series Elastic Haptic Rendering Architectures Emma Treadway 1, Yi Yang 1, and R. Brent Gillespie 1 Abstract In this paper, we explore certain tradeoffs in
Haptic Virtual Fixtures for Robot-Assisted Manipulation
 Haptic Virtual Fixtures for Robot-Assisted Manipulation Jake J. Abbott, Panadda Marayong, and Allison M. Okamura Department of Mechanical Engineering, The Johns Hopkins University {jake.abbott, pmarayong,
Haptic Virtual Fixtures for Robot-Assisted Manipulation Jake J. Abbott, Panadda Marayong, and Allison M. Okamura Department of Mechanical Engineering, The Johns Hopkins University {jake.abbott, pmarayong,
Designing Better Industrial Robots with Adams Multibody Simulation Software
 Designing Better Industrial Robots with Adams Multibody Simulation Software MSC Software: Designing Better Industrial Robots with Adams Multibody Simulation Software Introduction Industrial robots are
Designing Better Industrial Robots with Adams Multibody Simulation Software MSC Software: Designing Better Industrial Robots with Adams Multibody Simulation Software Introduction Industrial robots are
Multirate and Perceptual Techniques for Haptic Rendering in Virtual Environments
 Scuola Superiore di Studi Universitari e di Perfezionamento S.Anna Laboratorio PERCRO Multirate and Perceptual Techniques for Haptic Rendering in Virtual Environments Ph.D. Thesis by Emanuele Ruffaldi
Scuola Superiore di Studi Universitari e di Perfezionamento S.Anna Laboratorio PERCRO Multirate and Perceptual Techniques for Haptic Rendering in Virtual Environments Ph.D. Thesis by Emanuele Ruffaldi
Phantom-Based Haptic Interaction
 Phantom-Based Haptic Interaction Aimee Potts University of Minnesota, Morris 801 Nevada Ave. Apt. 7 Morris, MN 56267 (320) 589-0170 pottsal@cda.mrs.umn.edu ABSTRACT Haptic interaction is a new field of
Phantom-Based Haptic Interaction Aimee Potts University of Minnesota, Morris 801 Nevada Ave. Apt. 7 Morris, MN 56267 (320) 589-0170 pottsal@cda.mrs.umn.edu ABSTRACT Haptic interaction is a new field of
The Haptic Impendance Control through Virtual Environment Force Compensation
 The Haptic Impendance Control through Virtual Environment Force Compensation OCTAVIAN MELINTE Robotics and Mechatronics Department Institute of Solid Mechanicsof the Romanian Academy ROMANIA octavian.melinte@yahoo.com
The Haptic Impendance Control through Virtual Environment Force Compensation OCTAVIAN MELINTE Robotics and Mechatronics Department Institute of Solid Mechanicsof the Romanian Academy ROMANIA octavian.melinte@yahoo.com
Haptic Feedback in Mixed-Reality Environment
 The Visual Computer manuscript No. (will be inserted by the editor) Haptic Feedback in Mixed-Reality Environment Renaud Ott, Daniel Thalmann, Frédéric Vexo Virtual Reality Laboratory (VRLab) École Polytechnique
The Visual Computer manuscript No. (will be inserted by the editor) Haptic Feedback in Mixed-Reality Environment Renaud Ott, Daniel Thalmann, Frédéric Vexo Virtual Reality Laboratory (VRLab) École Polytechnique
Syllabus: Photoshop Advanced
 Syllabus: Photoshop Advanced Continuing Education Photoshop Advanced - CE 5421C 01 Amanda Benton, abenton@uarts.edu Course Description Even for students who have been working with Photoshop for years,
Syllabus: Photoshop Advanced Continuing Education Photoshop Advanced - CE 5421C 01 Amanda Benton, abenton@uarts.edu Course Description Even for students who have been working with Photoshop for years,
Game Artificial Intelligence ( CS 4731/7632 )
") Game Artificial Intelligence ( CS 4731/7632 ) Instructor: Stephen Lee-Urban http://www.cc.gatech.edu/~surban6/2018-gameai/ (soon) Piazza T-square What s this all about? Industry standard approaches to
Game Artificial Intelligence ( CS 4731/7632 ) Instructor: Stephen Lee-Urban http://www.cc.gatech.edu/~surban6/2018-gameai/ (soon) Piazza T-square What s this all about? Industry standard approaches to
PhysX-based Framework for Developing Games with Haptic Feedback
 PhysX-based Framework for Developing Games with Haptic Feedback R.P.C. Janaka Rajapakse* Yoshimasa Tokuyama** and Kouichi Konno*** Tainan National University of the Arts*, Tokyo Polytechnic University**,
PhysX-based Framework for Developing Games with Haptic Feedback R.P.C. Janaka Rajapakse* Yoshimasa Tokuyama** and Kouichi Konno*** Tainan National University of the Arts*, Tokyo Polytechnic University**,
CSE 165: 3D User Interaction. Lecture #14: 3D UI Design
 CSE 165: 3D User Interaction Lecture #14: 3D UI Design 2 Announcements Homework 3 due tomorrow 2pm Monday: midterm discussion Next Thursday: midterm exam 3D UI Design Strategies 3 4 Thus far 3DUI hardware
CSE 165: 3D User Interaction Lecture #14: 3D UI Design 2 Announcements Homework 3 due tomorrow 2pm Monday: midterm discussion Next Thursday: midterm exam 3D UI Design Strategies 3 4 Thus far 3DUI hardware
Robotic Capture and De-Orbit of a Tumbling and Heavy Target from Low Earth Orbit
 www.dlr.de Chart 1 Robotic Capture and De-Orbit of a Tumbling and Heavy Target from Low Earth Orbit Steffen Jaekel, R. Lampariello, G. Panin, M. Sagardia, B. Brunner, O. Porges, and E. Kraemer (1) M. Wieser,
www.dlr.de Chart 1 Robotic Capture and De-Orbit of a Tumbling and Heavy Target from Low Earth Orbit Steffen Jaekel, R. Lampariello, G. Panin, M. Sagardia, B. Brunner, O. Porges, and E. Kraemer (1) M. Wieser,
Rectilinear System. Introduction. Hardware
 Rectilinear System Introduction This lab studies the dynamic behavior of a system of translational mass, spring and damper components. The system properties will be determined first making use of basic
Rectilinear System Introduction This lab studies the dynamic behavior of a system of translational mass, spring and damper components. The system properties will be determined first making use of basic
Differences in Fitts Law Task Performance Based on Environment Scaling
 Differences in Fitts Law Task Performance Based on Environment Scaling Gregory S. Lee and Bhavani Thuraisingham Department of Computer Science University of Texas at Dallas 800 West Campbell Road Richardson,
Differences in Fitts Law Task Performance Based on Environment Scaling Gregory S. Lee and Bhavani Thuraisingham Department of Computer Science University of Texas at Dallas 800 West Campbell Road Richardson,