Lecture 1: Introduction to haptics and Kinesthetic haptic devices
|
|
|
- Alison Elisabeth Walsh
- 5 years ago
- Views:
Transcription

1 ME 327: Design and Control of Haptic Systems Winter 2018 Lecture 1: Introduction to haptics and Kinesthetic haptic devices Allison M. Okamura Stanford University
2 today s objectives introduce you to the field of haptics (definition, why it is important, and why haptic technology is challenging) give an overview of course content and policies
3 what is haptics?
4 haptic box Pass it around. Feel inside. Try to identify three objects.
5 hearing sight which sense is most valuable to you? smell taste touch which would you relinquish last? Katherine Kuchenbecker
6 hap tic ('hap-tik) adj. Of or relating to the sense of touch. [Greek haptikos, from haptesthai, to grasp, touch. (1890)] Cutaneous Temperature Texture Slip Vibration Force Johansson and Westling Kinesthesia Location/configuration Motion Force Compliance The haptic senses work together with the motor control system to: - Coordinate movement - Enable perception J. Edward Colgate




7 what would life be like without touch? Cutaneous Kinesthesia




8 why do we have brains? sea squirt Daniel Wolpert
9 how does your computer/ smartphone/ipad see you? illustration by Tom Igoe
10 what if... you could make any surface feel fuzzy, sticky, soft...? you could touch priceless works of art? there was a haptic holodeck? haptics could teach you?
11 Learning Method Retention What one reads 10% What one hears 26% What one sees 30% What one sees and hears 50% What one speaks 70% what about what one feels? J.E. Stice, Engineering Education, pp , 1987
12 haptic box what was in there? how did you know?
13 tactual stereognosis Tactual = tactile = via the sense of touch Stereognosis = the mental perception of threedimensionality by the senses, usually in reference to perceiving the form of solid objects by touch One study (Klatzky et al., 1985) showed that subjects could identify 100 common objects almost perfectly, taking about 2 seconds per object. People are very good at tactual stereognosis. Katherine Kuchenbecker
14 K. Kuchenbecker



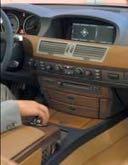

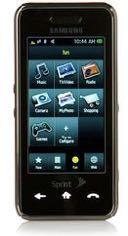
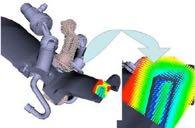
15 existing applications of haptics entertainment education Nintendo Stanford/JHU Immersion human-computer interfaces BMW Samsung Boeing
16 course overview
17 course objectives by the end of this course, you should: understand selected topics in haptics for virtual environments and teleoperation (see specific objectives on syllabus) improve your paper reading and presentation skills experience defining a design/research problem and investigating it be creative and have fun!
18 structure Lectures by Allison and the CAs give way to lectures by you as the quarter progresses grading 10% class participation 30% assignments 10% paper presentation 50% project
19 course content Part 1 Design and control of kinesthetic interfaces Part 2 Tactile devices Part 3 Teleoperation Part 4 Human haptics Part 5 Haptic interface evaluation Part 6 Student presentations
20 by the end of this course, you should be able to: Identify the primary mechanisms of human haptic sensing Understand a number of methods for sensing the position of and actuating haptic interfaces Describe the differences between grounded and ungrounded force feedback Identify salient features of a haptic device design List a variety of different types of haptic interfaces Implement controllers to render various dynamics (stiffness, damping, inertia) Describe and implement basic telemanipulation controllers Understand the causes of instability in virtual reality and teleoperation systems Design psychophysical and perceptual tests Describe applications of haptic devices Develop a new haptic device or application of a haptic device Read, evaluate, and critique research papers Design and deliver a research presentation
21 don t be shy Learning Method Retention What one reads 10% What one hears 26% What one sees 30% What one sees and hears 50% What one speaks 70% J.E. Stice, Engineering Education, pp , 1987
22 fill out the survey (return to my office or in class by Thursday class time) fill out when2meet poll (by Wednesday) register on piazza pay lab materials fee ($50 check made out to Stanford University) get access to PRL if desired (if necessary, sign up for training at
23 kinesthetic (force-feedback) device basics
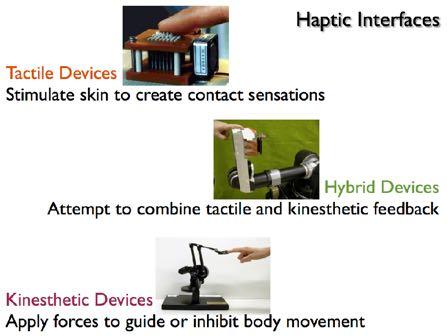
24 kinesthetic vs. tactile haptic devices Kinesthetic haptic devices display forces or motions through a tool Tactile haptic devices stimulate the skin single, resolved force distributed forces/ displacements
25 kinesthetic vs. tactile haptic devices Kinesthetic haptic devices are usually grounded Tactile haptic devices can more easily be wearable force is transmitted from ground motor to hand vibration feedback element encased in glove

26 typical kinesthetic device configurations manipulandum grasp exoskeleton drawing by Tricia Gibo drawing by Jorge Cham drawing by David Grow



27 manipulandums (expensive) Omega from Force Dimension delta configuration 3 degrees of freedom Phantom Premium 1.5 from SensAble/Geomagic 5-bar + rotation 3 degrees of freedom Virtuose from Haption additional wrist 6 degrees of freedom all images from Wikimedia Commons



28 manipulandums (cheaper) Falcon from Novint delta configuration 3 degrees of freedom Phantom Omni/Touch from SensAble/Geomagic 5-bar + rotation 3 degrees of freedom Sidewinder from Microsoft spherical mechanism 2 degrees of freedom image from Wikimedia Commons photographed by Akiko Nabeshima image from Wikimedia Commons



29 Grip/grasp Custom haptic gripper for Phantom Premium 2007 IEEE. Reprinted, with permission, from L. N. Verner and A. M. Okamura.. Effects of Translational and Gripping Force Feedback are Decoupled in a 4-Degreeof-Freedom Telemanipulator, World Haptics Conference,, pp , 2007 Single-finger Cybergrasp from Cyberglove Systems photograph courtesy Stanford Center for Design Research da Vinci Surgical System from Intuitive Surgical, Inc. (no programmable force feedback on gripper) photographed by Akiko Nabeshima



30 Exoskeletons KINARM Exoskeleton from BKIN Technologies Harvard DARPA images from Wikimedia Commons
31 Hapkit
32 Hapkit user force user force user force
33 Hapkit device force device force device force
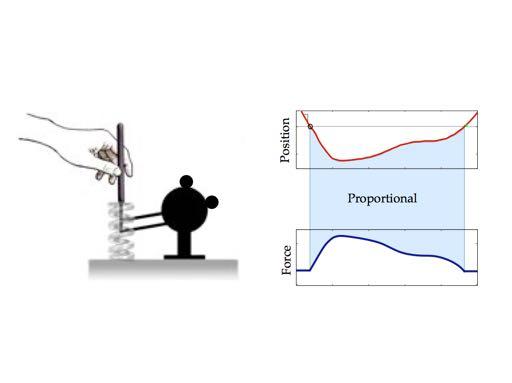
34 impedance-type kinesthetic devices impedance user user motion position sensors on kinesthetic haptic device force is computed as a function of position haptic device outputs force feels force most force feedback devices are of the impedance type
35 admittance-type kinesthetic devices admittance user user force force sensors on kinesthetic haptic device desired position is computed as a function of force haptic device outputs position feels motion admittance -type devices are not as common
36 K. Kuchenbecker
37 mechatronics basics
38 a kinesthetic haptic system Motion Digital position Human Haptic Mechatronics Teleoperated Robot? Device Interface Computer Force Digital force
39 a kinesthetic haptic system Motion Digital position Human Haptic Device system Mechatronics Interface Computer rendering dynamics Force Digital force
40 motion signals handle (m) drum or motor (rad) position sensor computer or board fwd kin. virtual handle (m) illustration by K. Kuchenbecker
41 force generation signals virtual world (N) D/A or PWM amplifier counts volts current or voltage motor torque handle (N) illustration by K. Kuchenbecker
42 Hapkit
43 fill out the survey (return to my office or in class by Thursday class time) fill out when2meet poll (by Wednesday) register on piazza pay lab materials fee ($50 check made out to Stanford University) get access to PRL if desired (if necessary, sign up for training at
2. Introduction to Computer Haptics
 2. Introduction to Computer Haptics Seungmoon Choi, Ph.D. Assistant Professor Dept. of Computer Science and Engineering POSTECH Outline Basics of Force-Feedback Haptic Interfaces Introduction to Computer
2. Introduction to Computer Haptics Seungmoon Choi, Ph.D. Assistant Professor Dept. of Computer Science and Engineering POSTECH Outline Basics of Force-Feedback Haptic Interfaces Introduction to Computer
Haptics in Medical Simulation
 Haptics in Medical Simulation Allison M. Okamura Associate Professor Department of Mechanical Engineering Design and Biomechanics Groups Stanford University Collaborative Haptics and Robotics in Medicine
Haptics in Medical Simulation Allison M. Okamura Associate Professor Department of Mechanical Engineering Design and Biomechanics Groups Stanford University Collaborative Haptics and Robotics in Medicine
CS277 - Experimental Haptics Lecture 1. Introduction to Haptics
 CS277 - Experimental Haptics Lecture 1 Introduction to Haptics Haptic Interfaces Enables physical interaction with virtual objects Haptic Rendering Potential Fields Polygonal Meshes Implicit Surfaces Volumetric
CS277 - Experimental Haptics Lecture 1 Introduction to Haptics Haptic Interfaces Enables physical interaction with virtual objects Haptic Rendering Potential Fields Polygonal Meshes Implicit Surfaces Volumetric
Hapkit: Open Hardware and Software for Haptics Integrated with MATLAB
 Hapkit: Open Hardware and Software for Haptics Integrated with MATLAB Allison M. Okamura Associate Professor Department of Mechanical Engineering Stanford University http://charm.stanford.edu Learning
Hapkit: Open Hardware and Software for Haptics Integrated with MATLAB Allison M. Okamura Associate Professor Department of Mechanical Engineering Stanford University http://charm.stanford.edu Learning
Peter Berkelman. ACHI/DigitalWorld
 Magnetic Levitation Haptic Peter Berkelman ACHI/DigitalWorld February 25, 2013 Outline: Haptics - Force Feedback Sample devices: Phantoms, Novint Falcon, Force Dimension Inertia, friction, hysteresis/backlash
Magnetic Levitation Haptic Peter Berkelman ACHI/DigitalWorld February 25, 2013 Outline: Haptics - Force Feedback Sample devices: Phantoms, Novint Falcon, Force Dimension Inertia, friction, hysteresis/backlash
FORCE FEEDBACK. Roope Raisamo
 FORCE FEEDBACK Roope Raisamo Multimodal Interaction Research Group Tampere Unit for Computer Human Interaction Department of Computer Sciences University of Tampere, Finland Outline Force feedback interfaces
FORCE FEEDBACK Roope Raisamo Multimodal Interaction Research Group Tampere Unit for Computer Human Interaction Department of Computer Sciences University of Tampere, Finland Outline Force feedback interfaces
CS277 - Experimental Haptics Lecture 2. Haptic Rendering
 CS277 - Experimental Haptics Lecture 2 Haptic Rendering Outline Announcements Human haptic perception Anatomy of a visual-haptic simulation Virtual wall and potential field rendering A note on timing...
CS277 - Experimental Haptics Lecture 2 Haptic Rendering Outline Announcements Human haptic perception Anatomy of a visual-haptic simulation Virtual wall and potential field rendering A note on timing...
Chapter 2 Introduction to Haptics 2.1 Definition of Haptics
 Chapter 2 Introduction to Haptics 2.1 Definition of Haptics The word haptic originates from the Greek verb hapto to touch and therefore refers to the ability to touch and manipulate objects. The haptic
Chapter 2 Introduction to Haptics 2.1 Definition of Haptics The word haptic originates from the Greek verb hapto to touch and therefore refers to the ability to touch and manipulate objects. The haptic
Haptics ME7960, Sect. 007 Lect. 6: Device Design I
 Haptics ME7960, Sect. 007 Lect. 6: Device Design I Spring 2009 Prof. William Provancher Prof. Jake Abbott University of Utah Salt Lake City, UT USA Today s Class Haptic Device Review (be sure to review
Haptics ME7960, Sect. 007 Lect. 6: Device Design I Spring 2009 Prof. William Provancher Prof. Jake Abbott University of Utah Salt Lake City, UT USA Today s Class Haptic Device Review (be sure to review
PROPRIOCEPTION AND FORCE FEEDBACK
 PROPRIOCEPTION AND FORCE FEEDBACK Roope Raisamo and Jukka Raisamo Multimodal Interaction Research Group Tampere Unit for Computer Human Interaction Department of Computer Sciences University of Tampere,
PROPRIOCEPTION AND FORCE FEEDBACK Roope Raisamo and Jukka Raisamo Multimodal Interaction Research Group Tampere Unit for Computer Human Interaction Department of Computer Sciences University of Tampere,
¾ B-TECH (IT) ¾ B-TECH (IT)
 ¾ B-TECH (IT)") HAPTIC TECHNOLOGY V.R.Siddhartha Engineering College Vijayawada. Presented by Sudheer Kumar.S CH.Sreekanth ¾ B-TECH (IT) ¾ B-TECH (IT) Email:samudralasudheer@yahoo.com Email:shri_136@yahoo.co.in Introduction
HAPTIC TECHNOLOGY V.R.Siddhartha Engineering College Vijayawada. Presented by Sudheer Kumar.S CH.Sreekanth ¾ B-TECH (IT) ¾ B-TECH (IT) Email:samudralasudheer@yahoo.com Email:shri_136@yahoo.co.in Introduction
Lecture 7: Human haptics
 ME 327: Design and Control of Haptic Systems Winter 2018 Lecture 7: Human haptics Allison M. Okamura Stanford University types of haptic sensing kinesthesia/ proprioception/ force cutaneous/ tactile Related
ME 327: Design and Control of Haptic Systems Winter 2018 Lecture 7: Human haptics Allison M. Okamura Stanford University types of haptic sensing kinesthesia/ proprioception/ force cutaneous/ tactile Related
Haptic Rendering CPSC / Sonny Chan University of Calgary
 Haptic Rendering CPSC 599.86 / 601.86 Sonny Chan University of Calgary Today s Outline Announcements Human haptic perception Anatomy of a visual-haptic simulation Virtual wall and potential field rendering
Haptic Rendering CPSC 599.86 / 601.86 Sonny Chan University of Calgary Today s Outline Announcements Human haptic perception Anatomy of a visual-haptic simulation Virtual wall and potential field rendering
Elements of Haptic Interfaces
 Elements of Haptic Interfaces Katherine J. Kuchenbecker Department of Mechanical Engineering and Applied Mechanics University of Pennsylvania kuchenbe@seas.upenn.edu Course Notes for MEAM 625, University
Elements of Haptic Interfaces Katherine J. Kuchenbecker Department of Mechanical Engineering and Applied Mechanics University of Pennsylvania kuchenbe@seas.upenn.edu Course Notes for MEAM 625, University
Force feedback interfaces & applications
 Force feedback interfaces & applications Roope Raisamo Tampere Unit for Computer-Human Interaction (TAUCHI) School of Information Sciences University of Tampere, Finland Based on material by Jukka Raisamo,
Force feedback interfaces & applications Roope Raisamo Tampere Unit for Computer-Human Interaction (TAUCHI) School of Information Sciences University of Tampere, Finland Based on material by Jukka Raisamo,
Cutaneous Feedback of Fingertip Deformation and Vibration for Palpation in Robotic Surgery
 Cutaneous Feedback of Fingertip Deformation and Vibration for Palpation in Robotic Surgery Claudio Pacchierotti Domenico Prattichizzo Katherine J. Kuchenbecker Motivation Despite its expected clinical
Cutaneous Feedback of Fingertip Deformation and Vibration for Palpation in Robotic Surgery Claudio Pacchierotti Domenico Prattichizzo Katherine J. Kuchenbecker Motivation Despite its expected clinical
Lecture 8: Tactile devices
 ME 327: Design and Control of Haptic Systems Winter 2018 Lecture 8: Tactile devices Allison M. Okamura Stanford University tactile haptic devices tactile feedback goal is to stimulate the skin in a programmable
ME 327: Design and Control of Haptic Systems Winter 2018 Lecture 8: Tactile devices Allison M. Okamura Stanford University tactile haptic devices tactile feedback goal is to stimulate the skin in a programmable
HAPTIC DEVICES FOR DESKTOP VIRTUAL PROTOTYPING APPLICATIONS
 The 3rd International Conference on Computational Mechanics and Virtual Engineering COMEC 2009 29 30 OCTOBER 2009, Brasov, Romania HAPTIC DEVICES FOR DESKTOP VIRTUAL PROTOTYPING APPLICATIONS A. Fratu 1,
The 3rd International Conference on Computational Mechanics and Virtual Engineering COMEC 2009 29 30 OCTOBER 2009, Brasov, Romania HAPTIC DEVICES FOR DESKTOP VIRTUAL PROTOTYPING APPLICATIONS A. Fratu 1,
Haptics CS327A
 Haptics CS327A - 217 hap tic adjective relating to the sense of touch or to the perception and manipulation of objects using the senses of touch and proprioception 1 2 Slave Master 3 Courtesy of Walischmiller
Haptics CS327A - 217 hap tic adjective relating to the sense of touch or to the perception and manipulation of objects using the senses of touch and proprioception 1 2 Slave Master 3 Courtesy of Walischmiller
Beyond Visual: Shape, Haptics and Actuation in 3D UI
 Beyond Visual: Shape, Haptics and Actuation in 3D UI Ivan Poupyrev Welcome, Introduction, & Roadmap 3D UIs 101 3D UIs 201 User Studies and 3D UIs Guidelines for Developing 3D UIs Video Games: 3D UIs for
Beyond Visual: Shape, Haptics and Actuation in 3D UI Ivan Poupyrev Welcome, Introduction, & Roadmap 3D UIs 101 3D UIs 201 User Studies and 3D UIs Guidelines for Developing 3D UIs Video Games: 3D UIs for
Seminar: Haptic Interaction in Mobile Environments TIEVS63 (4 ECTS)
") Seminar: Haptic Interaction in Mobile Environments TIEVS63 (4 ECTS) Jussi Rantala Tampere Unit for Computer-Human Interaction (TAUCHI) School of Information Sciences University of Tampere, Finland Contents
Seminar: Haptic Interaction in Mobile Environments TIEVS63 (4 ECTS) Jussi Rantala Tampere Unit for Computer-Human Interaction (TAUCHI) School of Information Sciences University of Tampere, Finland Contents
Proprioception & force sensing
 Proprioception & force sensing Roope Raisamo Tampere Unit for Computer-Human Interaction (TAUCHI) School of Information Sciences University of Tampere, Finland Based on material by Jussi Rantala, Jukka
Proprioception & force sensing Roope Raisamo Tampere Unit for Computer-Human Interaction (TAUCHI) School of Information Sciences University of Tampere, Finland Based on material by Jussi Rantala, Jukka
Touch & Haptics. Touch & High Information Transfer Rate. Modern Haptics. Human. Haptics
 Touch & Haptics Touch & High Information Transfer Rate Blind and deaf people have been using touch to substitute vision or hearing for a very long time, and successfully. OPTACON Hong Z Tan Purdue University
Touch & Haptics Touch & High Information Transfer Rate Blind and deaf people have been using touch to substitute vision or hearing for a very long time, and successfully. OPTACON Hong Z Tan Purdue University
Haptic interaction. Ruth Aylett
 Haptic interaction Ruth Aylett Contents Haptic definition Haptic model Haptic devices Measuring forces Haptic Technologies Haptics refers to manual interactions with environments, such as sensorial exploration
Haptic interaction Ruth Aylett Contents Haptic definition Haptic model Haptic devices Measuring forces Haptic Technologies Haptics refers to manual interactions with environments, such as sensorial exploration
MEAM 520. Haptic Rendering and Teleoperation
 MEAM 520 Haptic Rendering and Teleoperation Katherine J. Kuchenbecker, Ph.D. General Robotics, Automation, Sensing, and Perception Lab (GRASP) MEAM Department, SEAS, University of Pennsylvania Lecture
MEAM 520 Haptic Rendering and Teleoperation Katherine J. Kuchenbecker, Ph.D. General Robotics, Automation, Sensing, and Perception Lab (GRASP) MEAM Department, SEAS, University of Pennsylvania Lecture
Wireless Master-Slave Embedded Controller for a Teleoperated Anthropomorphic Robotic Arm with Gripping Force Sensing
 Wireless Master-Slave Embedded Controller for a Teleoperated Anthropomorphic Robotic Arm with Gripping Force Sensing Presented by: Benjamin B. Rhoades ECGR 6185 Adv. Embedded Systems January 16 th 2013
Wireless Master-Slave Embedded Controller for a Teleoperated Anthropomorphic Robotic Arm with Gripping Force Sensing Presented by: Benjamin B. Rhoades ECGR 6185 Adv. Embedded Systems January 16 th 2013
The Design of a Haptic Device for Training and Evaluating Surgeon and Novice Laparoscopic Movement Skills
 Clemson University TigerPrints All Theses Theses 12-2011 The Design of a Haptic Device for Training and Evaluating Surgeon and Novice Laparoscopic Movement Skills Ryan Bontreger Clemson University, rbontre@clemson.edu
Clemson University TigerPrints All Theses Theses 12-2011 The Design of a Haptic Device for Training and Evaluating Surgeon and Novice Laparoscopic Movement Skills Ryan Bontreger Clemson University, rbontre@clemson.edu
Lecture 9: Teleoperation
 ME 327: Design and Control of Haptic Systems Autumn 2018 Lecture 9: Teleoperation Allison M. Okamura Stanford University teleoperation history and examples the genesis of teleoperation? a Polygraph is
ME 327: Design and Control of Haptic Systems Autumn 2018 Lecture 9: Teleoperation Allison M. Okamura Stanford University teleoperation history and examples the genesis of teleoperation? a Polygraph is
MEAM 520. Haptic Rendering and Teleoperation
 MEAM 520 Haptic Rendering and Teleoperation Katherine J. Kuchenbecker, Ph.D. General Robotics, Automation, Sensing, and Perception Lab (GRASP) MEAM Department, SEAS, University of Pennsylvania Lecture
MEAM 520 Haptic Rendering and Teleoperation Katherine J. Kuchenbecker, Ph.D. General Robotics, Automation, Sensing, and Perception Lab (GRASP) MEAM Department, SEAS, University of Pennsylvania Lecture
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute Use an example to explain what is admittance control? You may refer to exoskeleton
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute Use an example to explain what is admittance control? You may refer to exoskeleton
Perceptual Overlays for Teaching Advanced Driving Skills
 Perceptual Overlays for Teaching Advanced Driving Skills Brent Gillespie Micah Steele ARC Conference May 24, 2000 5/21/00 1 Outline 1. Haptics in the Driver-Vehicle Interface 2. Perceptual Overlays for
Perceptual Overlays for Teaching Advanced Driving Skills Brent Gillespie Micah Steele ARC Conference May 24, 2000 5/21/00 1 Outline 1. Haptics in the Driver-Vehicle Interface 2. Perceptual Overlays for
Haptic Technology- Comprehensive Review Study with its Applications
 Haptic Technology- Comprehensive Review Study with its Applications Tanya Jaiswal 1, Rambha Yadav 2, Pooja Kedia 3 1,2 Student, Department of Computer Science and Engineering, Buddha Institute of Technology,
Haptic Technology- Comprehensive Review Study with its Applications Tanya Jaiswal 1, Rambha Yadav 2, Pooja Kedia 3 1,2 Student, Department of Computer Science and Engineering, Buddha Institute of Technology,
Lecture 6: Kinesthetic haptic devices: Control
 ME 327: Design and Control of Haptic Systems Autumn 2018 Lecture 6: Kinesthetic haptic devices: Control Allison M. Okamura Stanford University important stability concepts instability / limit cycle oscillation
ME 327: Design and Control of Haptic Systems Autumn 2018 Lecture 6: Kinesthetic haptic devices: Control Allison M. Okamura Stanford University important stability concepts instability / limit cycle oscillation
Haptic interaction. Ruth Aylett
 Haptic interaction Ruth Aylett Contents Haptic definition Haptic model Haptic devices Measuring forces Haptic Technologies Haptics refers to manual interactions with environments, such as sensorial exploration
Haptic interaction Ruth Aylett Contents Haptic definition Haptic model Haptic devices Measuring forces Haptic Technologies Haptics refers to manual interactions with environments, such as sensorial exploration
Introduction to Haptics
 Introduction to Haptics Roope Raisamo Multimodal Interaction Research Group Tampere Unit for Computer Human Interaction (TAUCHI) Department of Computer Sciences University of Tampere, Finland Definition
Introduction to Haptics Roope Raisamo Multimodal Interaction Research Group Tampere Unit for Computer Human Interaction (TAUCHI) Department of Computer Sciences University of Tampere, Finland Definition
Modeling and Experimental Studies of a Novel 6DOF Haptic Device
 Proceedings of The Canadian Society for Mechanical Engineering Forum 2010 CSME FORUM 2010 June 7-9, 2010, Victoria, British Columbia, Canada Modeling and Experimental Studies of a Novel DOF Haptic Device
Proceedings of The Canadian Society for Mechanical Engineering Forum 2010 CSME FORUM 2010 June 7-9, 2010, Victoria, British Columbia, Canada Modeling and Experimental Studies of a Novel DOF Haptic Device
phri: specialization groups HS PRELIMINARY
 phri: specialization groups HS 2019 - PRELIMINARY 1) VELOCITY ESTIMATION WITH HALL EFFECT SENSOR 2) VELOCITY MEASUREMENT: TACHOMETER VS HALL SENSOR 3) POSITION AND VELOCTIY ESTIMATION BASED ON KALMAN FILTER
phri: specialization groups HS 2019 - PRELIMINARY 1) VELOCITY ESTIMATION WITH HALL EFFECT SENSOR 2) VELOCITY MEASUREMENT: TACHOMETER VS HALL SENSOR 3) POSITION AND VELOCTIY ESTIMATION BASED ON KALMAN FILTER
Shape Memory Alloy Actuator Controller Design for Tactile Displays
 34th IEEE Conference on Decision and Control New Orleans, Dec. 3-5, 995 Shape Memory Alloy Actuator Controller Design for Tactile Displays Robert D. Howe, Dimitrios A. Kontarinis, and William J. Peine
34th IEEE Conference on Decision and Control New Orleans, Dec. 3-5, 995 Shape Memory Alloy Actuator Controller Design for Tactile Displays Robert D. Howe, Dimitrios A. Kontarinis, and William J. Peine
Haptic Feedback in Robot Assisted Minimal Invasive Surgery
 K. Bhatia Haptic Feedback in Robot Assisted Minimal Invasive Surgery 1 / 33 MIN Faculty Department of Informatics Haptic Feedback in Robot Assisted Minimal Invasive Surgery Kavish Bhatia University of
K. Bhatia Haptic Feedback in Robot Assisted Minimal Invasive Surgery 1 / 33 MIN Faculty Department of Informatics Haptic Feedback in Robot Assisted Minimal Invasive Surgery Kavish Bhatia University of
Haptic, vestibular and other physical input/output devices
 Human Touch Sensing - recap Haptic, vestibular and other physical input/output devices SGN-5406 Virtual Reality Autumn 2007 ismo.rakkolainen@tut.fi The human sensitive areas for touch: Hand, face Many
Human Touch Sensing - recap Haptic, vestibular and other physical input/output devices SGN-5406 Virtual Reality Autumn 2007 ismo.rakkolainen@tut.fi The human sensitive areas for touch: Hand, face Many
Tele-operation of a Robot Arm with Electro Tactile Feedback
 F Tele-operation of a Robot Arm with Electro Tactile Feedback Daniel S. Pamungkas and Koren Ward * Abstract Tactile feedback from a remotely controlled robotic arm can facilitate certain tasks by enabling
F Tele-operation of a Robot Arm with Electro Tactile Feedback Daniel S. Pamungkas and Koren Ward * Abstract Tactile feedback from a remotely controlled robotic arm can facilitate certain tasks by enabling
Benefits of using haptic devices in textile architecture
 28 September 2 October 2009, Universidad Politecnica de Valencia, Spain Alberto DOMINGO and Carlos LAZARO (eds.) Benefits of using haptic devices in textile architecture Javier SANCHEZ *, Joan SAVALL a
28 September 2 October 2009, Universidad Politecnica de Valencia, Spain Alberto DOMINGO and Carlos LAZARO (eds.) Benefits of using haptic devices in textile architecture Javier SANCHEZ *, Joan SAVALL a
Haptics and the User Interface
 Haptics and the User Interface based on slides from Karon MacLean, original slides available at: http://www.cs.ubc.ca/~maclean/publics/ what is haptic? from Greek haptesthai : to touch Haptic User Interfaces
Haptics and the User Interface based on slides from Karon MacLean, original slides available at: http://www.cs.ubc.ca/~maclean/publics/ what is haptic? from Greek haptesthai : to touch Haptic User Interfaces
Robotic System Simulation and Modeling Stefan Jörg Robotic and Mechatronic Center
 Robotic System Simulation and ing Stefan Jörg Robotic and Mechatronic Center Outline Introduction The SAFROS Robotic System Simulator Robotic System ing Conclusions Folie 2 DLR s Mirosurge: A versatile
Robotic System Simulation and ing Stefan Jörg Robotic and Mechatronic Center Outline Introduction The SAFROS Robotic System Simulator Robotic System ing Conclusions Folie 2 DLR s Mirosurge: A versatile
Computer Haptics and Applications
 Computer Haptics and Applications EURON Summer School 2003 Cagatay Basdogan, Ph.D. College of Engineering Koc University, Istanbul, 80910 (http://network.ku.edu.tr/~cbasdogan) Resources: EURON Summer School
Computer Haptics and Applications EURON Summer School 2003 Cagatay Basdogan, Ph.D. College of Engineering Koc University, Istanbul, 80910 (http://network.ku.edu.tr/~cbasdogan) Resources: EURON Summer School
TRENDS IN SURGICAL ROBOTICS
 TRENDS IN SURGICAL ROBOTICS HANNES BLEULER, MOHAMED BOURI, LAURA SANTOS-CARRERAS, SIMON GALLO, ALI SENGÜL, GIULIO ROGNINI, REYMOND CLAVEL * Abstract. Surgical Robotics today is essentially about two families
TRENDS IN SURGICAL ROBOTICS HANNES BLEULER, MOHAMED BOURI, LAURA SANTOS-CARRERAS, SIMON GALLO, ALI SENGÜL, GIULIO ROGNINI, REYMOND CLAVEL * Abstract. Surgical Robotics today is essentially about two families
Tele-operation of a robot arm with electro tactile feedback
 University of Wollongong Research Online Faculty of Engineering and Information Sciences - Papers: Part A Faculty of Engineering and Information Sciences 2013 Tele-operation of a robot arm with electro
University of Wollongong Research Online Faculty of Engineering and Information Sciences - Papers: Part A Faculty of Engineering and Information Sciences 2013 Tele-operation of a robot arm with electro
CHARACTERIZING THE HUMAN WRIST FOR IMPROVED HAPTIC INTERACTION
 Proceedings of IMECE 23 23 International Mechanical Engineering Congress and Exposition November 16-21, 23, Washington, D.C. USA IMECE23-4217 CHARACTERIZING THE HUMAN WRIST FOR IMPROVED HAPTIC INTERACTION
Proceedings of IMECE 23 23 International Mechanical Engineering Congress and Exposition November 16-21, 23, Washington, D.C. USA IMECE23-4217 CHARACTERIZING THE HUMAN WRIST FOR IMPROVED HAPTIC INTERACTION
Kinesthetic Feedback on interactive display surfaces
 Kinesthetic Feedback on interactive display surfaces Using Stick-Slip to provide directional forces and kinesthetic feedback on interactive display surfaces Philipp Weitz University of Tampere School of
Kinesthetic Feedback on interactive display surfaces Using Stick-Slip to provide directional forces and kinesthetic feedback on interactive display surfaces Philipp Weitz University of Tampere School of
Haptic Applications (Part 1) - Teleoperation & Haptics - Exoskeletons & Biosignals
 - Teleoperation & Haptics - Exoskeletons & Biosignals") Simulation Haptic Applications (Part 1) - Teleoperation & Haptics - Exoskeletons & Biosignals Feeling is believing Teachers Tricia Gibo & Jack Schorsch BioMechanical Engineering, Delft University of Technology
Simulation Haptic Applications (Part 1) - Teleoperation & Haptics - Exoskeletons & Biosignals Feeling is believing Teachers Tricia Gibo & Jack Schorsch BioMechanical Engineering, Delft University of Technology
Evaluation of Five-finger Haptic Communication with Network Delay
 Tactile Communication Haptic Communication Network Delay Evaluation of Five-finger Haptic Communication with Network Delay To realize tactile communication, we clarify some issues regarding how delay affects
Tactile Communication Haptic Communication Network Delay Evaluation of Five-finger Haptic Communication with Network Delay To realize tactile communication, we clarify some issues regarding how delay affects
Haptic - A Tactile Feedback Technology An Overview
 Haptic - A Tactile Feedback Technology An Overview Payal Mathur 1, Mragank Singhal 2, Shambhu Bhardwaj 3 1 College of Computing Sciences and Information Technology Teerthanker Mahaveer University, Moradabad
Haptic - A Tactile Feedback Technology An Overview Payal Mathur 1, Mragank Singhal 2, Shambhu Bhardwaj 3 1 College of Computing Sciences and Information Technology Teerthanker Mahaveer University, Moradabad
Applications of Haptics Technology in Advance Robotics
 Applications of Haptics Technology in Advance Robotics Vaibhav N. Fulkar vaibhav.fulkar@hotmail.com Mohit V. Shivramwar mohitshivramwar@gmail.com Anilesh A. Alkari anileshalkari123@gmail.com Abstract Haptic
Applications of Haptics Technology in Advance Robotics Vaibhav N. Fulkar vaibhav.fulkar@hotmail.com Mohit V. Shivramwar mohitshivramwar@gmail.com Anilesh A. Alkari anileshalkari123@gmail.com Abstract Haptic
Haptic Virtual Fixtures for Robot-Assisted Manipulation
 Haptic Virtual Fixtures for Robot-Assisted Manipulation Jake J. Abbott, Panadda Marayong, and Allison M. Okamura Department of Mechanical Engineering, The Johns Hopkins University {jake.abbott, pmarayong,
Haptic Virtual Fixtures for Robot-Assisted Manipulation Jake J. Abbott, Panadda Marayong, and Allison M. Okamura Department of Mechanical Engineering, The Johns Hopkins University {jake.abbott, pmarayong,
The Haptic Impendance Control through Virtual Environment Force Compensation
 The Haptic Impendance Control through Virtual Environment Force Compensation OCTAVIAN MELINTE Robotics and Mechatronics Department Institute of Solid Mechanicsof the Romanian Academy ROMANIA octavian.melinte@yahoo.com
The Haptic Impendance Control through Virtual Environment Force Compensation OCTAVIAN MELINTE Robotics and Mechatronics Department Institute of Solid Mechanicsof the Romanian Academy ROMANIA octavian.melinte@yahoo.com
Haptic Perception & Human Response to Vibrations
 Sensing HAPTICS Manipulation Haptic Perception & Human Response to Vibrations Tactile Kinesthetic (position / force) Outline: 1. Neural Coding of Touch Primitives 2. Functions of Peripheral Receptors B
Sensing HAPTICS Manipulation Haptic Perception & Human Response to Vibrations Tactile Kinesthetic (position / force) Outline: 1. Neural Coding of Touch Primitives 2. Functions of Peripheral Receptors B
International Journal of Advanced Research in Computer Science and Software Engineering
 Volume 3, Issue 3, March 2013 ISSN: 2277 128X International Journal of Advanced Research in Computer Science and Software Engineering Research Paper Available online at: www.ijarcsse.com A Study on SensAble
Volume 3, Issue 3, March 2013 ISSN: 2277 128X International Journal of Advanced Research in Computer Science and Software Engineering Research Paper Available online at: www.ijarcsse.com A Study on SensAble
Haptic Discrimination of Perturbing Fields and Object Boundaries
 Haptic Discrimination of Perturbing Fields and Object Boundaries Vikram S. Chib Sensory Motor Performance Program, Laboratory for Intelligent Mechanical Systems, Biomedical Engineering, Northwestern Univ.
Haptic Discrimination of Perturbing Fields and Object Boundaries Vikram S. Chib Sensory Motor Performance Program, Laboratory for Intelligent Mechanical Systems, Biomedical Engineering, Northwestern Univ.
Wearable Haptic Display to Present Gravity Sensation
 Wearable Haptic Display to Present Gravity Sensation Preliminary Observations and Device Design Kouta Minamizawa*, Hiroyuki Kajimoto, Naoki Kawakami*, Susumu, Tachi* (*) The University of Tokyo, Japan
Wearable Haptic Display to Present Gravity Sensation Preliminary Observations and Device Design Kouta Minamizawa*, Hiroyuki Kajimoto, Naoki Kawakami*, Susumu, Tachi* (*) The University of Tokyo, Japan
IOSR Journal of Engineering (IOSRJEN) e-issn: , p-issn: , Volume 2, Issue 11 (November 2012), PP 37-43
 e-issn: , p-issn: , Volume 2, Issue 11 (November 2012), PP 37-43") IOSR Journal of Engineering (IOSRJEN) e-issn: 2250-3021, p-issn: 2278-8719, Volume 2, Issue 11 (November 2012), PP 37-43 Operative Precept of robotic arm expending Haptic Virtual System Arnab Das 1, Swagat
IOSR Journal of Engineering (IOSRJEN) e-issn: 2250-3021, p-issn: 2278-8719, Volume 2, Issue 11 (November 2012), PP 37-43 Operative Precept of robotic arm expending Haptic Virtual System Arnab Das 1, Swagat
Design of Cylindrical Whole-hand Haptic Interface using Electrocutaneous Display
 Design of Cylindrical Whole-hand Haptic Interface using Electrocutaneous Display Hiroyuki Kajimoto 1,2 1 The University of Electro-Communications 1-5-1 Chofugaoka, Chofu, Tokyo 182-8585 Japan 2 Japan Science
Design of Cylindrical Whole-hand Haptic Interface using Electrocutaneous Display Hiroyuki Kajimoto 1,2 1 The University of Electro-Communications 1-5-1 Chofugaoka, Chofu, Tokyo 182-8585 Japan 2 Japan Science
Effects of Longitudinal Skin Stretch on the Perception of Friction
 In the Proceedings of the 2 nd World Haptics Conference, to be held in Tsukuba, Japan March 22 24, 2007 Effects of Longitudinal Skin Stretch on the Perception of Friction Nicholas D. Sylvester William
In the Proceedings of the 2 nd World Haptics Conference, to be held in Tsukuba, Japan March 22 24, 2007 Effects of Longitudinal Skin Stretch on the Perception of Friction Nicholas D. Sylvester William
Educational Haptics. David Grow, Lawton N. Verner and Allison M. Okamura Department of Mechanical Engineering The Johns Hopkins University
 Educational Haptics David Grow, Lawton N. Verner and Allison M. Okamura Department of Mechanical Engineering The Johns Hopkins University Abstract A major benefit of educational robotics is its hands-on
Educational Haptics David Grow, Lawton N. Verner and Allison M. Okamura Department of Mechanical Engineering The Johns Hopkins University Abstract A major benefit of educational robotics is its hands-on
Haptics ME7960, Sect. 007 Lect. 7: Device Design II
 Haptics ME7960, Sect. 007 Lect. 7: Device Design II Spring 2011 Prof. William Provancher University of Utah Salt Lake City, UT USA We would like to acknowledge the many colleagues whose course materials
Haptics ME7960, Sect. 007 Lect. 7: Device Design II Spring 2011 Prof. William Provancher University of Utah Salt Lake City, UT USA We would like to acknowledge the many colleagues whose course materials
Methods for Haptic Feedback in Teleoperated Robotic Surgery
 Young Group 5 1 Methods for Haptic Feedback in Teleoperated Robotic Surgery Paper Review Jessie Young Group 5: Haptic Interface for Surgical Manipulator System March 12, 2012 Paper Selection: A. M. Okamura.
Young Group 5 1 Methods for Haptic Feedback in Teleoperated Robotic Surgery Paper Review Jessie Young Group 5: Haptic Interface for Surgical Manipulator System March 12, 2012 Paper Selection: A. M. Okamura.
Computer Assisted Medical Interventions
 Outline Computer Assisted Medical Interventions Force control, collaborative manipulation and telemanipulation Bernard BAYLE Joint course University of Strasbourg, University of Houston, Telecom Paris
Outline Computer Assisted Medical Interventions Force control, collaborative manipulation and telemanipulation Bernard BAYLE Joint course University of Strasbourg, University of Houston, Telecom Paris
Gripper Telemanipulation System for the PR2 Robot. Jason Allen, SUNFEST (EE), University of the District of Columbia Advisor: Dr. Camillo J.
, University of the District of Columbia Advisor: Dr. Camillo J.") Gripper Telemanipulation System for the PR2 Robot Jason Allen, SUNFEST (EE), University of the District of Columbia Advisor: Dr. Camillo J. Taylor Abstract The most common method of teleoperation has an
Gripper Telemanipulation System for the PR2 Robot Jason Allen, SUNFEST (EE), University of the District of Columbia Advisor: Dr. Camillo J. Taylor Abstract The most common method of teleoperation has an
Virtual Environments. CSCI 420 Computer Graphics Lecture 25. History of Virtual Reality Flight Simulators Immersion, Interaction, Real-time Haptics
 CSCI 420 Computer Graphics Lecture 25 Virtual Environments Jernej Barbic University of Southern California History of Virtual Reality Flight Simulators Immersion, Interaction, Real-time Haptics 1 Virtual
CSCI 420 Computer Graphics Lecture 25 Virtual Environments Jernej Barbic University of Southern California History of Virtual Reality Flight Simulators Immersion, Interaction, Real-time Haptics 1 Virtual
Feeding human senses through Immersion
 Virtual Reality Feeding human senses through Immersion 1. How many human senses? 2. Overview of key human senses 3. Sensory stimulation through Immersion 4. Conclusion Th3.1 1. How many human senses? [TRV
Virtual Reality Feeding human senses through Immersion 1. How many human senses? 2. Overview of key human senses 3. Sensory stimulation through Immersion 4. Conclusion Th3.1 1. How many human senses? [TRV
WEARABLE HAPTIC DISPLAY FOR IMMERSIVE VIRTUAL ENVIRONMENT
 WEARABLE HAPTIC DISPLAY FOR IMMERSIVE VIRTUAL ENVIRONMENT Yutaka TANAKA*, Hisayuki YAMAUCHI* *, Kenichi AMEMIYA*** * Department of Mechanical Engineering, Faculty of Engineering Hosei University Kajinocho,
WEARABLE HAPTIC DISPLAY FOR IMMERSIVE VIRTUAL ENVIRONMENT Yutaka TANAKA*, Hisayuki YAMAUCHI* *, Kenichi AMEMIYA*** * Department of Mechanical Engineering, Faculty of Engineering Hosei University Kajinocho,
Virtual Environments. Virtual Reality. History of Virtual Reality. Virtual Reality. Cinerama. Cinerama
 CSCI 480 Computer Graphics Lecture 25 Virtual Environments Virtual Reality computer-simulated environments that can simulate physical presence in places in the real world, as well as in imaginary worlds
CSCI 480 Computer Graphics Lecture 25 Virtual Environments Virtual Reality computer-simulated environments that can simulate physical presence in places in the real world, as well as in imaginary worlds
1/22/13. Virtual Environments. Virtual Reality. History of Virtual Reality. Virtual Reality. Cinerama. Cinerama
 CSCI 480 Computer Graphics Lecture 25 Virtual Environments Apr 29, 2013 Jernej Barbic University of Southern California http://www-bcf.usc.edu/~jbarbic/cs480-s13/ History of Virtual Reality Immersion,
CSCI 480 Computer Graphics Lecture 25 Virtual Environments Apr 29, 2013 Jernej Barbic University of Southern California http://www-bcf.usc.edu/~jbarbic/cs480-s13/ History of Virtual Reality Immersion,
Vibration Feedback Models for Virtual Environments
 Presented at the 1998 IEEE International Conference on Robotics and Automation May 16-2, 1998, Leuven, Belgium Vibration Feedback Models for Virtual Environments Allison M. Okamura, 1,2 Jack T. Dennerlein
Presented at the 1998 IEEE International Conference on Robotics and Automation May 16-2, 1998, Leuven, Belgium Vibration Feedback Models for Virtual Environments Allison M. Okamura, 1,2 Jack T. Dennerlein
Practical Data Visualization and Virtual Reality. Virtual Reality VR Display Systems. Karljohan Lundin Palmerius
 Practical Data Visualization and Virtual Reality Virtual Reality VR Display Systems Karljohan Lundin Palmerius Synopsis Virtual Reality basics Common display systems Visual modality Sound modality Interaction
Practical Data Visualization and Virtual Reality Virtual Reality VR Display Systems Karljohan Lundin Palmerius Synopsis Virtual Reality basics Common display systems Visual modality Sound modality Interaction
Touching and Walking: Issues in Haptic Interface
 Touching and Walking: Issues in Haptic Interface Hiroo Iwata 1 1 Institute of Engineering Mechanics and Systems, University of Tsukuba, 80, Tsukuba, 305-8573 Japan iwata@kz.tsukuba.ac.jp Abstract. This
Touching and Walking: Issues in Haptic Interface Hiroo Iwata 1 1 Institute of Engineering Mechanics and Systems, University of Tsukuba, 80, Tsukuba, 305-8573 Japan iwata@kz.tsukuba.ac.jp Abstract. This
Overview of current developments in haptic APIs
 Central European Seminar on Computer Graphics for students, 2011 AUTHOR: Petr Kadleček SUPERVISOR: Petr Kmoch Overview of current developments in haptic APIs Presentation Haptics Haptic programming Haptic
Central European Seminar on Computer Graphics for students, 2011 AUTHOR: Petr Kadleček SUPERVISOR: Petr Kmoch Overview of current developments in haptic APIs Presentation Haptics Haptic programming Haptic
PR2 HEAD AND HAND MANIPULATION THROUGH TELE-OPERATION
 PR2 HEAD AND HAND MANIPULATION THROUGH TELE-OPERATION Using an Attitude and Heading Reference System Jason Allen, SUNFEST (EE), University of the District of Columbia Advisor: Dr. Camillo J. Taylor A Brief
PR2 HEAD AND HAND MANIPULATION THROUGH TELE-OPERATION Using an Attitude and Heading Reference System Jason Allen, SUNFEST (EE), University of the District of Columbia Advisor: Dr. Camillo J. Taylor A Brief
Wearable Haptic Feedback Actuators for Training in Robotic Surgery
 Wearable Haptic Feedback Actuators for Training in Robotic Surgery NSF Summer Undergraduate Fellowship in Sensor Technologies Joshua Fernandez (Mechanical Eng.) University of Maryland Baltimore County
Wearable Haptic Feedback Actuators for Training in Robotic Surgery NSF Summer Undergraduate Fellowship in Sensor Technologies Joshua Fernandez (Mechanical Eng.) University of Maryland Baltimore County
3D interaction techniques in Virtual Reality Applications for Engineering Education
 3D interaction techniques in Virtual Reality Applications for Engineering Education Cristian Dudulean 1, Ionel Stareţu 2 (1) Industrial Highschool Rosenau, Romania E-mail: duduleanc@yahoo.com (2) Transylvania
3D interaction techniques in Virtual Reality Applications for Engineering Education Cristian Dudulean 1, Ionel Stareţu 2 (1) Industrial Highschool Rosenau, Romania E-mail: duduleanc@yahoo.com (2) Transylvania
Using Hybrid Reality to Explore Scientific Exploration Scenarios
 Using Hybrid Reality to Explore Scientific Exploration Scenarios EVA Technology Workshop 2017 Kelsey Young Exploration Scientist NASA Hybrid Reality Lab - Background Combines real-time photo-realistic
Using Hybrid Reality to Explore Scientific Exploration Scenarios EVA Technology Workshop 2017 Kelsey Young Exploration Scientist NASA Hybrid Reality Lab - Background Combines real-time photo-realistic
Complementary Tactile Sensor and Human Interface for Robotic Telemanipulation
 Complementary Tactile Sensor and Human Interface for Robotic Telemanipulation Emil M. Petriu, Pierre Payeur, na-maria Cretu, and Codrin Pasca School of Information Technology and Engineering University
Complementary Tactile Sensor and Human Interface for Robotic Telemanipulation Emil M. Petriu, Pierre Payeur, na-maria Cretu, and Codrin Pasca School of Information Technology and Engineering University
Whole-Hand Kinesthetic Feedback and Haptic Perception in Dextrous Virtual Manipulation
 100 IEEE TRANSACTIONS ON SYSTEMS, MAN, AND CYBERNETICS PART A: SYSTEMS AND HUMANS, VOL. 33, NO. 1, JANUARY 2003 Whole-Hand Kinesthetic Feedback and Haptic Perception in Dextrous Virtual Manipulation Costas
100 IEEE TRANSACTIONS ON SYSTEMS, MAN, AND CYBERNETICS PART A: SYSTEMS AND HUMANS, VOL. 33, NO. 1, JANUARY 2003 Whole-Hand Kinesthetic Feedback and Haptic Perception in Dextrous Virtual Manipulation Costas
Invited Chapter in Automation, Miniature Robotics and Sensors for Non-Destructive Testing and Evaluation, Y. Bar-Cohen Editor, April 99
 10.2 HAPTIC INTERFACES Yoseph Bar-Cohen Jet Propulsion Laboratory, Caltech, 4800 Oak Grove Dr., Pasadena, CA 90740 818-354-2610, fax 818-393-4057, yosi@jpl.nasa.gov Constantinos Mavroidis, and Charles
10.2 HAPTIC INTERFACES Yoseph Bar-Cohen Jet Propulsion Laboratory, Caltech, 4800 Oak Grove Dr., Pasadena, CA 90740 818-354-2610, fax 818-393-4057, yosi@jpl.nasa.gov Constantinos Mavroidis, and Charles
Output Devices - Non-Visual
 IMGD 5100: Immersive HCI Output Devices - Non-Visual Robert W. Lindeman Associate Professor Department of Computer Science Worcester Polytechnic Institute gogo@wpi.edu Overview Here we are concerned with
IMGD 5100: Immersive HCI Output Devices - Non-Visual Robert W. Lindeman Associate Professor Department of Computer Science Worcester Polytechnic Institute gogo@wpi.edu Overview Here we are concerned with
Development and Testing of a Telemanipulation System with Arm and Hand Motion
 Development and Testing of a Telemanipulation System with Arm and Hand Motion Michael L. Turner, Ryan P. Findley, Weston B. Griffin, Mark R. Cutkosky and Daniel H. Gomez Dexterous Manipulation Laboratory
Development and Testing of a Telemanipulation System with Arm and Hand Motion Michael L. Turner, Ryan P. Findley, Weston B. Griffin, Mark R. Cutkosky and Daniel H. Gomez Dexterous Manipulation Laboratory
Enabling Multi-finger, Multi-hand Virtualized Grasping
 Submitted to 2003 IEEE ICRA Enabling Multi-finger, Multi-hand Virtualized Grasping Federico Barbagli 1, Roman Devengenzo 2, Kenneth Salisbury 3 1 Computer Science Department, barbagli@robotics.stanford.edu
Submitted to 2003 IEEE ICRA Enabling Multi-finger, Multi-hand Virtualized Grasping Federico Barbagli 1, Roman Devengenzo 2, Kenneth Salisbury 3 1 Computer Science Department, barbagli@robotics.stanford.edu
Aural and Haptic Displays
 Teil 5: Aural and Haptic Displays Virtuelle Realität Wintersemester 2007/08 Prof. Bernhard Jung Overview Aural Displays Haptic Displays Further information: The Haptics Community Web Site: http://haptic.mech.northwestern.edu/
Teil 5: Aural and Haptic Displays Virtuelle Realität Wintersemester 2007/08 Prof. Bernhard Jung Overview Aural Displays Haptic Displays Further information: The Haptics Community Web Site: http://haptic.mech.northwestern.edu/
BACHELOR OF TECHNOLOGY IN ELECTRONICS & COMMUNICATION ENGINEERING. E.C.E-B Batch No :9
 HAPTIC TECHNOLOGY A technical seminar report Submitted in partial fulfillment of the requirements for the award of the degree of BACHELOR OF TECHNOLOGY IN ELECTRONICS & COMMUNICATION ENGINEERING Submitted
HAPTIC TECHNOLOGY A technical seminar report Submitted in partial fulfillment of the requirements for the award of the degree of BACHELOR OF TECHNOLOGY IN ELECTRONICS & COMMUNICATION ENGINEERING Submitted
Haplug: A Haptic Plug for Dynamic VR Interactions
 Haplug: A Haptic Plug for Dynamic VR Interactions Nobuhisa Hanamitsu *, Ali Israr Disney Research, USA nobuhisa.hanamitsu@disneyresearch.com Abstract. We demonstrate applications of a new actuator, the
Haplug: A Haptic Plug for Dynamic VR Interactions Nobuhisa Hanamitsu *, Ali Israr Disney Research, USA nobuhisa.hanamitsu@disneyresearch.com Abstract. We demonstrate applications of a new actuator, the
Abstract. Introduction. Threee Enabling Observations
 The PHANTOM Haptic Interface: A Device for Probing Virtual Objects Thomas H. Massie and J. K. Salisbury. Proceedings of the ASME Winter Annual Meeting, Symposium on Haptic Interfaces for Virtual Environment
The PHANTOM Haptic Interface: A Device for Probing Virtual Objects Thomas H. Massie and J. K. Salisbury. Proceedings of the ASME Winter Annual Meeting, Symposium on Haptic Interfaces for Virtual Environment
TEACHING HAPTIC RENDERING SONNY CHAN, STANFORD UNIVERSITY
 TEACHING HAPTIC RENDERING SONNY CHAN, STANFORD UNIVERSITY MARCH 4, 2012 HAPTICS SYMPOSIUM Overview A brief introduction to CS 277 @ Stanford Core topics in haptic rendering Use of the CHAI3D framework
TEACHING HAPTIC RENDERING SONNY CHAN, STANFORD UNIVERSITY MARCH 4, 2012 HAPTICS SYMPOSIUM Overview A brief introduction to CS 277 @ Stanford Core topics in haptic rendering Use of the CHAI3D framework
Creating Fully Immersive Virtual and Augmented Reality by Emulating Force Feedback with Reactive Grip Touch Feedback
 Creating Fully Immersive Virtual and Augmented Reality by Emulating Force Feedback with Reactive Grip Touch Feedback William R. Provancher Founder/CEO Tactical Haptics, Inc., Union City, CA, USA info@tacticalhaptics.com
Creating Fully Immersive Virtual and Augmented Reality by Emulating Force Feedback with Reactive Grip Touch Feedback William R. Provancher Founder/CEO Tactical Haptics, Inc., Union City, CA, USA info@tacticalhaptics.com
Design and Operation of a Force-Reflecting Magnetic Levitation Coarse-Fine Teleoperation System
 IEEE International Conference on Robotics and Automation, (ICRA 4) New Orleans, USA, April 6 - May 1, 4, pp. 4147-41. Design and Operation of a Force-Reflecting Magnetic Levitation Coarse-Fine Teleoperation
IEEE International Conference on Robotics and Automation, (ICRA 4) New Orleans, USA, April 6 - May 1, 4, pp. 4147-41. Design and Operation of a Force-Reflecting Magnetic Levitation Coarse-Fine Teleoperation
Abdulmotaleb El Saddik Associate Professor Dr.-Ing., SMIEEE, P.Eng.
 Abdulmotaleb El Saddik Associate Professor Dr.-Ing., SMIEEE, P.Eng. Multimedia Communications Research Laboratory University of Ottawa Ontario Research Network of E-Commerce www.mcrlab.uottawa.ca abed@mcrlab.uottawa.ca
Abdulmotaleb El Saddik Associate Professor Dr.-Ing., SMIEEE, P.Eng. Multimedia Communications Research Laboratory University of Ottawa Ontario Research Network of E-Commerce www.mcrlab.uottawa.ca abed@mcrlab.uottawa.ca
Ubiquitous Computing Summer Episode 16: HCI. Hannes Frey and Peter Sturm University of Trier. Hannes Frey and Peter Sturm, University of Trier 1
 Episode 16: HCI Hannes Frey and Peter Sturm University of Trier University of Trier 1 Shrinking User Interface Small devices Narrow user interface Only few pixels graphical output No keyboard Mobility
Episode 16: HCI Hannes Frey and Peter Sturm University of Trier University of Trier 1 Shrinking User Interface Small devices Narrow user interface Only few pixels graphical output No keyboard Mobility
Comparison of Haptic and Non-Speech Audio Feedback
 Comparison of Haptic and Non-Speech Audio Feedback Cagatay Goncu 1 and Kim Marriott 1 Monash University, Mebourne, Australia, cagatay.goncu@monash.edu, kim.marriott@monash.edu Abstract. We report a usability
Comparison of Haptic and Non-Speech Audio Feedback Cagatay Goncu 1 and Kim Marriott 1 Monash University, Mebourne, Australia, cagatay.goncu@monash.edu, kim.marriott@monash.edu Abstract. We report a usability
Universidade de Aveiro Departamento de Electrónica, Telecomunicações e Informática. Output Devices - II
 Universidade de Aveiro Departamento de Electrónica, Telecomunicações e Informática Output Devices - II Realidade Virtual e Aumentada 2017/2018 Beatriz Sousa Santos The human senses need specialized interfaces
Universidade de Aveiro Departamento de Electrónica, Telecomunicações e Informática Output Devices - II Realidade Virtual e Aumentada 2017/2018 Beatriz Sousa Santos The human senses need specialized interfaces
Exploring Surround Haptics Displays
 Exploring Surround Haptics Displays Ali Israr Disney Research 4615 Forbes Ave. Suite 420, Pittsburgh, PA 15213 USA israr@disneyresearch.com Ivan Poupyrev Disney Research 4615 Forbes Ave. Suite 420, Pittsburgh,
Exploring Surround Haptics Displays Ali Israr Disney Research 4615 Forbes Ave. Suite 420, Pittsburgh, PA 15213 USA israr@disneyresearch.com Ivan Poupyrev Disney Research 4615 Forbes Ave. Suite 420, Pittsburgh,
Reality-Based Models for Vibration Feedback in Virtual Environments
 IEEE/ASME TRANSACTIONS ON MECHATRONICS, VOL. 6, NO. 3, SEPTEMBER 2001 245 Reality-Based Models for Vibration Feedback in Virtual Environments Allison M. Okamura, Associate Member, IEEE, Mark R. Cutkosky,
IEEE/ASME TRANSACTIONS ON MECHATRONICS, VOL. 6, NO. 3, SEPTEMBER 2001 245 Reality-Based Models for Vibration Feedback in Virtual Environments Allison M. Okamura, Associate Member, IEEE, Mark R. Cutkosky,
Haptic Rendering and Volumetric Visualization with SenSitus
 Haptic Rendering and Volumetric Visualization with SenSitus Stefan Birmanns, Ph.D. Department of Molecular Biology The Scripps Research Institute 10550 N. Torrey Pines Road, Mail TPC6 La Jolla, California,
Haptic Rendering and Volumetric Visualization with SenSitus Stefan Birmanns, Ph.D. Department of Molecular Biology The Scripps Research Institute 10550 N. Torrey Pines Road, Mail TPC6 La Jolla, California,