LASER ASSISTED COMBINED TELEOPERATION AND AUTONOMOUS CONTROL
|
|
|
- Brian Morris
- 6 years ago
- Views:
Transcription
1 ANS EPRRSD - 13 th Robotics & remote Systems for Hazardous Environments 11 th Emergency Preparedness & Response Knoxville, TN, August 7-10, 2011, on CD-ROM, American Nuclear Society, LaGrange Park, IL (2011) LASER ASSISTED COMBINED TELEOPERATION AND AUTONOMOUS CONTROL Karan Khokar, Redwan Alqasemi, PhD., Kyle B. Reed, PhD., Rajiv Dubey, PhD. Department of Mechanical Engineering University of South Florida ENG 19A, 4202 E. Fowler Ave., Tampa, FL kkhokar@mail.usf.edu, alqasemi@usf.edu, kylereed@usf.edu, dubey@usf.edu ABSTRACT In this paper we demonstrate combined human teleoperation and autonomous control of a remote manipulator in an unstructured environment to enable people with limited upper body strength to carry out a remote task. Range data from a laser sensor mounted on the end-effector of a remote manipulator is used by the user to select via-points in teleoperation. This information enables autonomous execution of trajectories. The human user is primarily involved in higher level decision making; the user performs minimal teleoperation by selecting critical points using a laser. In the event the sensor or human detects an unexpected obstacle during autonomous trajectory execution, the controller terminates the trajectory so that the human can teleoperate the end-effector safely around the obstacle. Once the obstacle has been averted, the system resumes the control and guides the manipulator autonomously to the target. Tests on healthy human subjects on a pick-and-place task involving multiple objects showed that this combined teleoperation and autonomous methodology using minimal sensory data made it physically and cognitively easier for the user to execute the task. Key Words: Teleoperation, Telerobotics, Sensor, Human Robot Interaction 1 INTRODUCTION According to the 2006 US Census Bureau report [1] 51.2 million Americans suffer from some form of disability and 10.7 million of them are unable to independently perform activities of daily living (ADL). They need personal assistance to do ADLs such as to pick-and-place an object or open a door. Robotic devices have been used to enable physically disabled individuals to execute ADLs [2]. However, teleoperation of a remote manipulator puts a lot of physical and cognitive load on the operator [2], more so for persons with disabilities. There have been previous attempts to provide computer based assistance by combining teleoperation and autonomous modes in shared and traded control formulations [3] [4] [5], by means of virtual fixtures [6] and potential fields [7]. Previous work at the Rehabilitation Robotics Laboratory at the University of South Florida has focused on reducing operator s fatigue by providing assistance depending on the accuracy of sensor and model information [8], augmenting the performance of motion-impaired users in job-related tasks using scaled teleoperation and haptics [9], and providing assistance based on real-time environmental information and user intention [10]. Our recent work [11] demonstrated the use of a laser sensor in identifying target objects, obstacles and goal points by human in teleoperation. This information enabled autonomous execution of trajectories under human supervisory control. The methodology resulted in an increased speed of task execution. It also reduced the physical effort in executing the task by 85.4%.
2 Karan Khokar et al. In this work, we have considered a more general testing environment and the possibility of encountering unexpected obstacles while executing a remote task. The human in teleoperation scans the environment for critical points using the laser. The coordinate of each point is recorded using arm kinematics and laser range data. Here the critical points are the via-points for the remote arm trajectories. In a pick-and-place task, these could be the points from where objects are picked up and dropped. Once the points are recorded, the arm autonomously executes the trajectories between these via-points. In case an unexpected obstacle is encountered, the human terminates the trajectory and steers the arm clear of the obstacle. The obstacle can be detected by the laser sensor as long as it is in the line of sight of the laser. In this case also the human steers the arm clear of the obstacle. After that the system autonomously guides the arm to the via-point where the arm was headed before the obstacle detection. Thus the human user is involved in making high level decisions and minimal teleoperation during the task execution. The system manages the low level execution. We hypothesize that this combined teleoperation and autonomous mode of task execution using laser based assistance will make it easier for human users to execute remote tasks. The proposed methodology is intended for use by persons with disabilities in executing ADL tasks. However, the methodology has a much broader scope for implementation and could be used in telerobotics based application areas like nuclear waste clean-up, robotic assisted surgery, space/under-sea telerobotics etc. 2 RELATED WORK Hasegawa et al. [12] enabled autonomous execution of tasks by generating 3D models of objects with a laser sensor that computed 3D coordinates of points on objects. These models were compared to a database of CAD models to match objects. Takahashi and Yashige [13] presented a simple and easy to use laser-based robot positioning system to assist the elderly in doing daily pick-and-place activities. The robot in this case was an x-y-z linearly actuated mechanism mounted on the ceiling. Nguyen et al. [14] made use of a system consisting of a laser pointer, a monochrome camera, a color filter and a stereo camera pair to estimate the 3D coordinates of a point in the environment so their robot could fetch objects in the environment designated with the laser pointer. Here we use the laser range finder to select via-points that enable autonomous execution of trajectories under human supervisory control. 3 LASER ASSISTED CONTROL CONCEPT To execute a remote task, the human user teleoperates a PUMA manipulator via a Phantom Omni haptic device. To make teleoperation easier, we have implemented Cartesian based mapping from the Omni coordinate frame to the PUMA coordinate frame. As the Omni is teleoperated by the human user, incremental end-effector transformation matrices from the Omni are sent to the PUMA controller at a rate of 1000 Hz. Differential velocity components from these transformation matrices are then computed. These are mapped to the PUMA coordinate system using the equation (1). This aligns the two coordinate frames thus producing motion on the PUMA similar to that on Omni. This makes teleoperating the PUMA intuitive to the user = * (1) Page 2 of 11
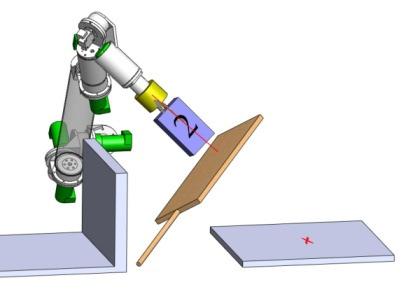
3 Laser Assisted Combined Teleoperation and Autonomous Control The laser is mounted on a bracket on the end-effector as shown in Fig 1. The laser beam is always parallel to the z-axis of the end-effector. By teleoperating the end-effector the user is easily able to point to different points in the environment. Using the range information of the laser sensor and the PUMA kinematics, the user is able to record the 3D coordinates of the points the laser is pointing to. This information is used by the system to generate the start and the end points of the trajectories and the equations of the surface normals. Figure 1. Laser sensor mounted on the end-effector 3.1 Laser based Target Point Determination and Autonomous Trajectory Execution For generating a linear trajectory, the coordinates of the start and the end points are needed. From Fig. 2, we see that as the laser points to Target, the system determines the coordinates of this point using the transformation equations given in Equation (2). B T O = T B E * T E L * T L O (2) where O, L, E and B stand for object, laser, end-effector and base respectively. Each term in the equation is a 4x4 homogenous transformation matrix. T is known from forward kinematics. T has a unit rotation matrix part and its translation components are the offset distances of the E L L laser point source from the end-effector or from joint 6. T O has a unit rotation matrix part and its translation components are [0 0 D], where D is the distance measured by the laser. B E Figure 2. Concept Recording a point using laser range finder Page 3 of 11
4 Karan Khokar et al. After the start and end points are recorded, the trajectory points are generated using linear interpolation and the equivalent angle-axis method. These trajectory points are stored in an array and read at a rate of 200 Hz. Joint angles from these are determined using Resolved Rate algorithm. Then using a PD control law, joint torques are computed and the trajectory is autonomously generated. 3.2 Laser based Autonomous Surface Alignment Surface alignment of the end-effector is essential to grasp an object from a convenient angle. This is implemented as an autonomous function. For surface alignment, it is necessary to determine the equation of the surface normal. By pointing to three points on a surface using the laser, their coordinates are recorded as mentioned in the previous section. Let the points be denoted by, and (refer Fig. 3). Let and be the vectors connecting the three points as shown in the figure. The surface normal is then computed as X. The negative of the surface normal will be the end-effector z-axis after it has aligned with the surface. The x and y-axes are computed using criteria for minimum end-effector rotation. For this, the cross product of the x- axis (before alignment) with the z-axis computed above gives the y-axis. The cross product of the y-axis with the z-axis gives the x-axis. The x, y and z-axes thus computed become the columns of the rotation matrix of the end-effector after it has aligned with the surface. Equivalent angle-axis method is used to determine the trajectory points for autonomous rotation. (a) Before Alignment (b) After Alignment Figure 3. Concept Laser based autonomous surface orientation by recording three surface points Page 4 of 11
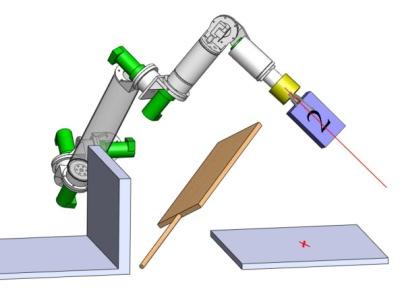
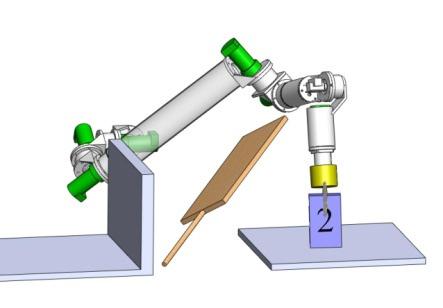
5 Laser Assisted Combined Teleoperation and Autonomous Control 4 APPLICATION OF LASER BASED CONCEPT TO TASK EXECUTION Here we give an example of a pick-and-place task with unexpected obstacles and demonstrate how the laser based assistance functions are used to execute the task. During the task, the user commands the system to carry out specific actions using specific keyboard keys. Fig. 4 shows the various steps during the execution of a pick-and-place task using a laser. The user starts executing the task by pointing the laser to three points on a surface and recording the coordinates of each point by pressing a keyboard key (Fig. 4(a)). The surface in this case is any platform where an object is placed or needs to be placed. These three points will enable autonomous surface orientation later that helps to align the end-effector with the surface. This will enable grasping or placement of the object from/on the surface from a convenient angle thus making it easy. Next, the user points to the various via-points in the pick-and-place task (Fig. 4(b), 4(c), 4(d)). The user then commands the system to execute autonomous trajectory to the first via-point recorded (Fig 4(e)). At any point, if necessary, the user can command the endeffector to autonomously align with the surface by pressing the required keyboard keys. After picking up object 1, the user commands the system to autonomously go to the second via point (Fig. 4(f)). If the user encounters an unexpected obstacle, the user commands the termination of the trajectory. The user then steers the arm clear of the obstacle (Fig. 4(g)). After this, on user command, the system autonomously generates a trajectory to go to the second via-point where it was supposed to go before the obstacle was detected (Fig. 4(h)). Object 1 is dropped at the second point. The user then commands the system to autonomously go to the third via point to pick up object 2. At times, certain points in the environment are difficult to point to with the laser due to the arm joint limits and the extended bracket for mounting the laser. The extended bracket makes it difficult to orient the end-effector beyond a certain limit. In such cases, the user can point to these points when the end effector is near them. In the set-up shown, the user needs to drop off object 2 to the target location. The user selects the point and commands the arm to autonomously go to that point (Fig. 4(i)). If an unexpected obstacle appears in the path of the laser, the laser detects it and the trajectory is terminated by the system (Fig. 4(j)). An object is considered as an obstacle if it is within a certain threshold distance of the laser. After the user steers the arm clear of the obstacle (Fig. 4(k)), the user commands the arm to go to the point it was previously supposed to go, in this case the drop-off point for object 2. The system generates and executes an autonomous trajectory in this case too (Fig. 4(l)). Thus the user supervises the task and generates high level commands while the system generates and executes trajectories. The only phases of the task where the user teleoperates is during the selection of via-points, surface points, steering the arm clear of obstacles and fine adjustments to locate the end-effector for convenient grasping. In this way the user does minimal teleoperation while executing the task. This results in fewer movements by the user to execute the task. Also, once the points are recorded, the user need not bother about locating the points again. The system autonomously steers the arm to the target location even if unexpected obstacles appear. This provides further assistance. Page 5 of 11

 (c)")
 (g)")
 (k)")


6 Karan Khokar et al. (a) (b) (c) (d) (e) (f) (g) (h) (i) (j) (k) (l) Figure 4. Steps in laser based pick-and-place task execution Page 6 of 11
. A SICK DT60 laser range finder is mounted on the PUMA end effector (refer Fig.1).")

7 Laser Assisted Combined Teleoperation and Autonomous Control 5 EVALUTATION OF THE EFFECTIVENESS OF LASER BASED METHOD 5.1 Experimental Test Bed Our test bed consists of a PUMA arm and an Omni haptic device (Fig. 5). A SICK DT60 laser range finder is mounted on the PUMA end effector (refer Fig.1). The subjects could see the remote environment directly as the PUMA and Omni were close to each other. For applications in which the remote environment is further away, cameras can provide visual feedback. The PUMA and Omni were controlled on separate PCs communicating via Ethernet. The communication between PCs and data processing was at 1000 Hz. A real-time operating system, QNX, with a multithreaded programming architecture was used to control the PUMA. The Omni was controlled on Microsoft Visual C++ on a Windows machine. 5.2 Experimental Methodology and Set-up Figure 5. PUMA and Omni manipulators In order to evaluate the effectiveness of the laser-assisted method, human subject testing was carried out. Although the laser-based method is intended for assisting people with disabilities to perform ADLs, here we have tested healthy human subjects. We tested five subjects, all males, ages 22 to 40 years. None of the subjects had any experience in using manipulators. Each subject was asked to perform a pick-and-place task three times in each of the two modes: the unassisted teleoperation mode and the laser-assisted mode. In the unassisted mode, the complete task was executed solely by teleoperating the PUMA without any assistance. For each run the time taken to complete the task and the end effector transformation matrix was recorded at 1 millisecond intervals. The user experience in executing the task was also recorded for each user. Before starting the tests, the subjects were given sufficient time to acclimatize with the system. In general, each subject was given 5 to 6 trials before testing. The experimental set up is shown in Fig. 6. The three via-points are the box on the stool on the left, the green sticky on the shelf to its right and the yellow box. The green sticky on the far right of the shelf is not considered a via-point because it is out of the range of safe PUMA endeffector orientation from its initial or Ready configuration (the PUMA configuration shown in Fig. 6 is not the initial or Ready configuration). This last point is recorded by the laser after the yellow box has been picked up whereas the three via-points are recorded at the very beginning of the task execution when the PUMA is at Ready configuration. The task in each mode is to start from the Ready position, pick up the white box and place it at the second via-point, pick up the yellow box and place it on the green sticky on the far right. If an unexpected obstacle appears, then it has to be detected by the laser if the obstacle is within its line of sight, otherwise it should be detected by the human. Accordingly, the trajectory is terminated by the system or by the human. The obstacle has then to be averted in teleoperation. Next the user continues Page 7 of 11


8 Karan Khokar et al. teleoperating or commands the system to generate a trajectory autonomously. This depends on whether the mode is unassisted or laser assisted. Figure 6. Experimental set-up for pick-and-place task execution 6 RESULTS AND DISCUSSIONS The time that each user takes to execute the task in each mode and the amount of hand and arm motion utilized in doing the task, are the metrics used to evaluate the laser-assisted control method. The user experience was also recorded after each participant completed their test trials. The average time to complete the task is shown in Fig. 7. We found that subjects took an average of 56.14% more time to complete the task in the laser-assisted mode than they did in the unassisted mode. Therefore no savings in time was observed with laser-assisted mode. However a major portion of the time in the laser-assisted mode was used in setting up the task by pointing to the via-points and surface points. Also due to the joint limits of the PUMA and the extension of the bracket on which the laser sensor and camera is mounted (Fig. 6), it is difficult to point to certain points in the environment. Teleoperation is needed in these cases to get the arm at a convenient configuration to point. These issues delay the task execution in laser-assisted mode. If the task demands that these recorded points are to be used again in the future, then the laserassisted mode should be faster. This will also be possible if the range of motion of each joint is increased, joint limit avoidance is implemented or the bracket design mounts the laser closer to the end-effector. Figure 7. Time to execute the task in the laser assisted and unassisted modes Page 8 of 11


9 Laser Assisted Combined Teleoperation and Autonomous Control The amount of motion of the user s hands and arms in executing the task was measured as they teleoperated the Omni in each of the two modes. The movement was broken up into distance traversed by the arm and rotation of the wrist. Total distance traversed by a subject's arm was determined by summing up the differential translation components of the Omni transformation matrices recorded at each time step during task execution. The total angle rotated by the subject s wrist during task execution was also determined by applying the equivalent angle-axis method to the differential rotation components of the transformation matrices recorded at the Omni. Average values of arm distances and wrist angles per subject per mode for the three trials are shown in Fig. 8 and Fig. 9. Figure 8. Average total angle rotated by users wrist while teleoperating in the two modes Figure 9. Average total distance traversed by users arm while teleoperating in the two modes From these plots, we see that the subjects make larger movements with their arms while executing the task in unassisted mode than they do in the laser-assisted mode. On average over all trials for all participants, the arm movements were 35% less in the laser-assisted mode. However, the wrist movements are an average of 20% more in the laser-assisted mode. The increase in the wrist movements can be attributed to the initial rotation that the user engages in while selecting via points. Moreover, overcoming the obstacle is carried out in teleoperation in either of the two modes which results in considerable amount of wrist rotations. The decrease in arm movements in the laser-assisted mode is due to the users not needing to teleoperate between via-points. Autonomous trajectories are generated for this purpose. This result is of special significance since the system is intended for use by persons with disability. Less arm movements would make the task easier for them to perform. Page 9 of 11
10 Karan Khokar et al. At the end of their test trials, the users were asked about their experience in executing the task in the two modes. The users were of the opinion that the laser-based method was much easier since they did not have to execute the trajectories; the system did it for them. All the participants felt that pressing the various keyboard keys for recording surface points, via-points, trajectory termination, trajectory execution etc. was tedious and remembering them was a burden. They believed that the laser-based method would have been easier if there was a better interface or if they had to make fewer key presses. 7 CONCLUSIONS Thus, we have demonstrated an easy-to-use interface using the laser sensor to execute remote tasks. Although it took longer for the able-bodied test subjects to execute the task in the laser-assisted mode, they made significantly less arm movements. This is very important for people with disabilities since their main aim is to execute the task; speed of task execution does not matter as much to them. As part of future work, we would like to make the interface easier to use by either using voice control or reducing the number of key presses for enabling features. We intend to make the teleoperation easier by incorporating joint limit avoidances and singularity avoidances. We would like to test visual feedback based teleoperation since at times it is impossible for the user to see where the laser is pointing due to distance or occlusion. Autonomous obstacle avoidance and autonomous end-effector orientation by human motion intention recognition would reduce teleoperation further. These areas will be explored in the future. 8 ACKNOWLEDGMENTS The authors would like to acknowledge Michael Schimidt and William Pence for their assistance in testing. 9 REFERENCES 1. Americans with disabilities: 2002, (2006). 2. G. Bolmsjo, H. Neveryd and H. Eftring, Robotics in rehabilitation, IEEE Transactions on Rehabilitation Engineering, Volume: 3 Issue: 1, pp , (1995). 3. S. Hayati and S. Venkataraman, "Design and Implementation of a Robot Control System with Traded and Shared Control Capability," IEEE International Conference on Robotics and Automation, USA, pp (1989). 4. Y. Yokokohji., A. Ogawa and H. Hasunuma, "Operation modes for cooperating with autonomous functions in intelligent teleoperation systems," IEEE International Conference on Robotics and Automation, USA, pp (1993). 5. T. Tarn, N. Xi and C. Guo, "Task-Oriented Human and Machine Co-Operation in Telerobotic Systems," Annual Reviews in Control, Volume 20, pp (1996) 6. L. Joly and C. Androit, "Motion Constraints to a Force Reflecting Telerobot through Real-Time Simulation of a Virtual Mechanism," IEEE International Conference on Robotics and Automation, Volume 1, pp (1995). Page 10 of 11
11 Laser Assisted Combined Teleoperation and Autonomous Control 7. P. Aigner and B. McCarragher, "Human Integration into Robot Control utilizing Potential Fields," IEEE International Conference on Robotics and Automation, Volume 1, pp , (1997). 8. S. Everett and R. Dubey, "Human-machine cooperative telerobotics using uncertain sensor or model data," IEEE International Conference on Robotics and Automation, Volume 2, pp , (1998). 9. N. Pernalete, W. Yu, R. Dubey and W. Moreno, Development of a Robotic Haptic Interface to Assist the Performance of Vocational Tasks by People with Disability, IEEE International Conference on Robotics and Automation, Volume 2, pp , (2002). 10. W. Yu, R. Alqasemi, R. Dubey and N. Pernalete, Telemanipulation Assistance based on Motion Intention Recognition, IEEE International Conference on Robotics and Automation, pp , (2005). 11. K. Khokar, K.B. Reed, R. Alqasemi, R. Dubey, "Laser-assisted telerobotic control for enhancing manipulation capabilities of persons with disabilities", IEEE International Conference on Intelligent Robots and Systems, Taipei, pp (2010) 12. T. Hasegawa, T. Suehiro and K. Takase, "A Robot System for Unstructured Environments Based on an Environment Model and Manipulation Skills," IEEE International Conference on Robotics and Automation, Volume 1, pp , Y. Takahashi and M. Yashige, "Robotic manipulator operated by human interface with positioning control using laser pointer," IEEE 26th Annual Conference of the Industrial Electronics Society, Volume 1, pp , H. Nguyen, C. Anderson, A. Trevor, A. Jain, Z. Xu and C. Kemp, El-E: An Assistive Robot that Fetches Objects from Flat Surfaces, The Robotic Helpers Workshop at HRI 08, (2008). Page 11 of 11
Laser-Assisted Telerobotic Control for Enhancing Manipulation Capabilities of Persons with Disabilities
 The 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-22, 2010, Taipei, Taiwan Laser-Assisted Telerobotic Control for Enhancing Manipulation Capabilities of Persons with
The 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-22, 2010, Taipei, Taiwan Laser-Assisted Telerobotic Control for Enhancing Manipulation Capabilities of Persons with
Wednesday, October 29, :00-04:00pm EB: 3546D. TELEOPERATION OF MOBILE MANIPULATORS By Yunyi Jia Advisor: Prof.
 Wednesday, October 29, 2014 02:00-04:00pm EB: 3546D TELEOPERATION OF MOBILE MANIPULATORS By Yunyi Jia Advisor: Prof. Ning Xi ABSTRACT Mobile manipulators provide larger working spaces and more flexibility
Wednesday, October 29, 2014 02:00-04:00pm EB: 3546D TELEOPERATION OF MOBILE MANIPULATORS By Yunyi Jia Advisor: Prof. Ning Xi ABSTRACT Mobile manipulators provide larger working spaces and more flexibility
Human Intention Recognition Based Assisted Telerobotic Grasping of Objects in an Unstructured Environment
 University of South Florida Scholar Commons Graduate Theses and Dissertations Graduate School January 2013 Human Intention Recognition Based Assisted Telerobotic Grasping of Objects in an Unstructured
University of South Florida Scholar Commons Graduate Theses and Dissertations Graduate School January 2013 Human Intention Recognition Based Assisted Telerobotic Grasping of Objects in an Unstructured
The Haptic Impendance Control through Virtual Environment Force Compensation
 The Haptic Impendance Control through Virtual Environment Force Compensation OCTAVIAN MELINTE Robotics and Mechatronics Department Institute of Solid Mechanicsof the Romanian Academy ROMANIA octavian.melinte@yahoo.com
The Haptic Impendance Control through Virtual Environment Force Compensation OCTAVIAN MELINTE Robotics and Mechatronics Department Institute of Solid Mechanicsof the Romanian Academy ROMANIA octavian.melinte@yahoo.com
Robust Haptic Teleoperation of a Mobile Manipulation Platform
 Robust Haptic Teleoperation of a Mobile Manipulation Platform Jaeheung Park and Oussama Khatib Stanford AI Laboratory Stanford University http://robotics.stanford.edu Abstract. This paper presents a new
Robust Haptic Teleoperation of a Mobile Manipulation Platform Jaeheung Park and Oussama Khatib Stanford AI Laboratory Stanford University http://robotics.stanford.edu Abstract. This paper presents a new
Modeling and Experimental Studies of a Novel 6DOF Haptic Device
 Proceedings of The Canadian Society for Mechanical Engineering Forum 2010 CSME FORUM 2010 June 7-9, 2010, Victoria, British Columbia, Canada Modeling and Experimental Studies of a Novel DOF Haptic Device
Proceedings of The Canadian Society for Mechanical Engineering Forum 2010 CSME FORUM 2010 June 7-9, 2010, Victoria, British Columbia, Canada Modeling and Experimental Studies of a Novel DOF Haptic Device
* Intelli Robotic Wheel Chair for Specialty Operations & Physically Challenged
 ADVANCED ROBOTICS SOLUTIONS * Intelli Mobile Robot for Multi Specialty Operations * Advanced Robotic Pick and Place Arm and Hand System * Automatic Color Sensing Robot using PC * AI Based Image Capturing
ADVANCED ROBOTICS SOLUTIONS * Intelli Mobile Robot for Multi Specialty Operations * Advanced Robotic Pick and Place Arm and Hand System * Automatic Color Sensing Robot using PC * AI Based Image Capturing
UNIT VI. Current approaches to programming are classified as into two major categories:
 Unit VI 1 UNIT VI ROBOT PROGRAMMING A robot program may be defined as a path in space to be followed by the manipulator, combined with the peripheral actions that support the work cycle. Peripheral actions
Unit VI 1 UNIT VI ROBOT PROGRAMMING A robot program may be defined as a path in space to be followed by the manipulator, combined with the peripheral actions that support the work cycle. Peripheral actions
NCCT IEEE PROJECTS ADVANCED ROBOTICS SOLUTIONS. Latest Projects, in various Domains. Promise for the Best Projects
 NCCT Promise for the Best Projects IEEE PROJECTS in various Domains Latest Projects, 2009-2010 ADVANCED ROBOTICS SOLUTIONS EMBEDDED SYSTEM PROJECTS Microcontrollers VLSI DSP Matlab Robotics ADVANCED ROBOTICS
NCCT Promise for the Best Projects IEEE PROJECTS in various Domains Latest Projects, 2009-2010 ADVANCED ROBOTICS SOLUTIONS EMBEDDED SYSTEM PROJECTS Microcontrollers VLSI DSP Matlab Robotics ADVANCED ROBOTICS
Design and Control of the BUAA Four-Fingered Hand
 Proceedings of the 2001 IEEE International Conference on Robotics & Automation Seoul, Korea May 21-26, 2001 Design and Control of the BUAA Four-Fingered Hand Y. Zhang, Z. Han, H. Zhang, X. Shang, T. Wang,
Proceedings of the 2001 IEEE International Conference on Robotics & Automation Seoul, Korea May 21-26, 2001 Design and Control of the BUAA Four-Fingered Hand Y. Zhang, Z. Han, H. Zhang, X. Shang, T. Wang,
CONTROLLING METHODS AND CHALLENGES OF ROBOTIC ARM
 CONTROLLING METHODS AND CHALLENGES OF ROBOTIC ARM Aniket D. Kulkarni *1, Dr.Sayyad Ajij D. *2 *1(Student of E&C Department, MIT Aurangabad, India) *2(HOD of E&C department, MIT Aurangabad, India) aniket2212@gmail.com*1,
CONTROLLING METHODS AND CHALLENGES OF ROBOTIC ARM Aniket D. Kulkarni *1, Dr.Sayyad Ajij D. *2 *1(Student of E&C Department, MIT Aurangabad, India) *2(HOD of E&C department, MIT Aurangabad, India) aniket2212@gmail.com*1,
Real-Time Bilateral Control for an Internet-Based Telerobotic System
 708 Real-Time Bilateral Control for an Internet-Based Telerobotic System Jahng-Hyon PARK, Joonyoung PARK and Seungjae MOON There is a growing tendency to use the Internet as the transmission medium of
708 Real-Time Bilateral Control for an Internet-Based Telerobotic System Jahng-Hyon PARK, Joonyoung PARK and Seungjae MOON There is a growing tendency to use the Internet as the transmission medium of
Haptic Virtual Fixtures for Robot-Assisted Manipulation
 Haptic Virtual Fixtures for Robot-Assisted Manipulation Jake J. Abbott, Panadda Marayong, and Allison M. Okamura Department of Mechanical Engineering, The Johns Hopkins University {jake.abbott, pmarayong,
Haptic Virtual Fixtures for Robot-Assisted Manipulation Jake J. Abbott, Panadda Marayong, and Allison M. Okamura Department of Mechanical Engineering, The Johns Hopkins University {jake.abbott, pmarayong,
Cognition & Robotics. EUCog - European Network for the Advancement of Artificial Cognitive Systems, Interaction and Robotics
 Cognition & Robotics Recent debates in Cognitive Robotics bring about ways to seek a definitional connection between cognition and robotics, ponder upon the questions: EUCog - European Network for the
Cognition & Robotics Recent debates in Cognitive Robotics bring about ways to seek a definitional connection between cognition and robotics, ponder upon the questions: EUCog - European Network for the
FUNDAMENTALS ROBOT TECHNOLOGY. An Introduction to Industrial Robots, T eleoperators and Robot Vehicles. D J Todd. Kogan Page
 FUNDAMENTALS of ROBOT TECHNOLOGY An Introduction to Industrial Robots, T eleoperators and Robot Vehicles D J Todd &\ Kogan Page First published in 1986 by Kogan Page Ltd 120 Pentonville Road, London Nl
FUNDAMENTALS of ROBOT TECHNOLOGY An Introduction to Industrial Robots, T eleoperators and Robot Vehicles D J Todd &\ Kogan Page First published in 1986 by Kogan Page Ltd 120 Pentonville Road, London Nl
MEAM 520. Haptic Rendering and Teleoperation
 MEAM 520 Haptic Rendering and Teleoperation Katherine J. Kuchenbecker, Ph.D. General Robotics, Automation, Sensing, and Perception Lab (GRASP) MEAM Department, SEAS, University of Pennsylvania Lecture
MEAM 520 Haptic Rendering and Teleoperation Katherine J. Kuchenbecker, Ph.D. General Robotics, Automation, Sensing, and Perception Lab (GRASP) MEAM Department, SEAS, University of Pennsylvania Lecture
Robot Task-Level Programming Language and Simulation
 Robot Task-Level Programming Language and Simulation M. Samaka Abstract This paper presents the development of a software application for Off-line robot task programming and simulation. Such application
Robot Task-Level Programming Language and Simulation M. Samaka Abstract This paper presents the development of a software application for Off-line robot task programming and simulation. Such application
Research Proposal: Autonomous Mobile Robot Platform for Indoor Applications :xwgn zrvd ziad mipt ineyiil zinepehe`e zciip ziheaex dnxethlt
 Research Proposal: Autonomous Mobile Robot Platform for Indoor Applications :xwgn zrvd ziad mipt ineyiil zinepehe`e zciip ziheaex dnxethlt Igal Loevsky, advisor: Ilan Shimshoni email: igal@tx.technion.ac.il
Research Proposal: Autonomous Mobile Robot Platform for Indoor Applications :xwgn zrvd ziad mipt ineyiil zinepehe`e zciip ziheaex dnxethlt Igal Loevsky, advisor: Ilan Shimshoni email: igal@tx.technion.ac.il
Development of a general purpose robot arm for use by disabled and elderly at home
 Development of a general purpose robot arm for use by disabled and elderly at home Gunnar Bolmsjö Magnus Olsson Ulf Lorentzon {gbolmsjo,molsson,ulorentzon}@robotics.lu.se Div. of Robotics, Lund University,
Development of a general purpose robot arm for use by disabled and elderly at home Gunnar Bolmsjö Magnus Olsson Ulf Lorentzon {gbolmsjo,molsson,ulorentzon}@robotics.lu.se Div. of Robotics, Lund University,
Motion Control of a Three Active Wheeled Mobile Robot and Collision-Free Human Following Navigation in Outdoor Environment
 Proceedings of the International MultiConference of Engineers and Computer Scientists 2016 Vol I,, March 16-18, 2016, Hong Kong Motion Control of a Three Active Wheeled Mobile Robot and Collision-Free
Proceedings of the International MultiConference of Engineers and Computer Scientists 2016 Vol I,, March 16-18, 2016, Hong Kong Motion Control of a Three Active Wheeled Mobile Robot and Collision-Free
MEAM 520. Haptic Rendering and Teleoperation
 MEAM 520 Haptic Rendering and Teleoperation Katherine J. Kuchenbecker, Ph.D. General Robotics, Automation, Sensing, and Perception Lab (GRASP) MEAM Department, SEAS, University of Pennsylvania Lecture
MEAM 520 Haptic Rendering and Teleoperation Katherine J. Kuchenbecker, Ph.D. General Robotics, Automation, Sensing, and Perception Lab (GRASP) MEAM Department, SEAS, University of Pennsylvania Lecture
Università di Roma La Sapienza. Medical Robotics. A Teleoperation System for Research in MIRS. Marilena Vendittelli
 Università di Roma La Sapienza Medical Robotics A Teleoperation System for Research in MIRS Marilena Vendittelli the DLR teleoperation system slave three versatile robots MIRO light-weight: weight < 10
Università di Roma La Sapienza Medical Robotics A Teleoperation System for Research in MIRS Marilena Vendittelli the DLR teleoperation system slave three versatile robots MIRO light-weight: weight < 10
A NOVEL CONTROL SYSTEM FOR ROBOTIC DEVICES
 A NOVEL CONTROL SYSTEM FOR ROBOTIC DEVICES THAIR A. SALIH, OMAR IBRAHIM YEHEA COMPUTER DEPT. TECHNICAL COLLEGE/ MOSUL EMAIL: ENG_OMAR87@YAHOO.COM, THAIRALI59@YAHOO.COM ABSTRACT It is difficult to find
A NOVEL CONTROL SYSTEM FOR ROBOTIC DEVICES THAIR A. SALIH, OMAR IBRAHIM YEHEA COMPUTER DEPT. TECHNICAL COLLEGE/ MOSUL EMAIL: ENG_OMAR87@YAHOO.COM, THAIRALI59@YAHOO.COM ABSTRACT It is difficult to find
Medical Robotics. Part II: SURGICAL ROBOTICS
 5 Medical Robotics Part II: SURGICAL ROBOTICS In the last decade, surgery and robotics have reached a maturity that has allowed them to be safely assimilated to create a new kind of operating room. This
5 Medical Robotics Part II: SURGICAL ROBOTICS In the last decade, surgery and robotics have reached a maturity that has allowed them to be safely assimilated to create a new kind of operating room. This
JEPPIAAR ENGINEERING COLLEGE
 JEPPIAAR ENGINEERING COLLEGE Jeppiaar Nagar, Rajiv Gandhi Salai 600 119 DEPARTMENT OFMECHANICAL ENGINEERING QUESTION BANK VII SEMESTER ME6010 ROBOTICS Regulation 013 JEPPIAAR ENGINEERING COLLEGE Jeppiaar
JEPPIAAR ENGINEERING COLLEGE Jeppiaar Nagar, Rajiv Gandhi Salai 600 119 DEPARTMENT OFMECHANICAL ENGINEERING QUESTION BANK VII SEMESTER ME6010 ROBOTICS Regulation 013 JEPPIAAR ENGINEERING COLLEGE Jeppiaar
Multisensory Based Manipulation Architecture
 Marine Robot and Dexterous Manipulatin for Enabling Multipurpose Intevention Missions WP7 Multisensory Based Manipulation Architecture GIRONA 2012 Y2 Review Meeting Pedro J Sanz IRS Lab http://www.irs.uji.es/
Marine Robot and Dexterous Manipulatin for Enabling Multipurpose Intevention Missions WP7 Multisensory Based Manipulation Architecture GIRONA 2012 Y2 Review Meeting Pedro J Sanz IRS Lab http://www.irs.uji.es/
Prof. Ciro Natale. Francesco Castaldo Andrea Cirillo Pasquale Cirillo Umberto Ferrara Luigi Palmieri
 Real Time Control of an Anthropomorphic Robotic Arm using FPGA Advisor: Prof. Ciro Natale Students: Francesco Castaldo Andrea Cirillo Pasquale Cirillo Umberto Ferrara Luigi Palmieri Objective Introduction
Real Time Control of an Anthropomorphic Robotic Arm using FPGA Advisor: Prof. Ciro Natale Students: Francesco Castaldo Andrea Cirillo Pasquale Cirillo Umberto Ferrara Luigi Palmieri Objective Introduction
Semi-autonomous Telerobotic Manipulation: A Viable Approach for Space Structure Deployment and Maintenance
 Semi-autonomous Telerobotic Manipulation: A Viable Approach for Space Structure Deployment and Maintenance Young S. Park 1, Hyosig Kang 1, Thomas F. Ewing 1, Eric L. Faulring 2, Brian P. DeJong 2, Michael
Semi-autonomous Telerobotic Manipulation: A Viable Approach for Space Structure Deployment and Maintenance Young S. Park 1, Hyosig Kang 1, Thomas F. Ewing 1, Eric L. Faulring 2, Brian P. DeJong 2, Michael
Robots Learning from Robots: A proof of Concept Study for Co-Manipulation Tasks. Luka Peternel and Arash Ajoudani Presented by Halishia Chugani
 Robots Learning from Robots: A proof of Concept Study for Co-Manipulation Tasks Luka Peternel and Arash Ajoudani Presented by Halishia Chugani Robots learning from humans 1. Robots learn from humans 2.
Robots Learning from Robots: A proof of Concept Study for Co-Manipulation Tasks Luka Peternel and Arash Ajoudani Presented by Halishia Chugani Robots learning from humans 1. Robots learn from humans 2.
Available theses (October 2011) MERLIN Group
 MERLIN Group") Available theses (October 2011) MERLIN Group Politecnico di Milano - Dipartimento di Elettronica e Informazione MERLIN Group 2 Luca Bascetta bascetta@elet.polimi.it Gianni Ferretti ferretti@elet.polimi.it
Available theses (October 2011) MERLIN Group Politecnico di Milano - Dipartimento di Elettronica e Informazione MERLIN Group 2 Luca Bascetta bascetta@elet.polimi.it Gianni Ferretti ferretti@elet.polimi.it
Evaluation of Haptic Virtual Fixtures in Psychomotor Skill Development for Robotic Surgical Training
 Department of Electronics, Information and Bioengineering Neuroengineering and medical robotics Lab Evaluation of Haptic Virtual Fixtures in Psychomotor Skill Development for Robotic Surgical Training
Department of Electronics, Information and Bioengineering Neuroengineering and medical robotics Lab Evaluation of Haptic Virtual Fixtures in Psychomotor Skill Development for Robotic Surgical Training
HAND-SHAPED INTERFACE FOR INTUITIVE HUMAN- ROBOT COMMUNICATION THROUGH HAPTIC MEDIA
 HAND-SHAPED INTERFACE FOR INTUITIVE HUMAN- ROBOT COMMUNICATION THROUGH HAPTIC MEDIA RIKU HIKIJI AND SHUJI HASHIMOTO Department of Applied Physics, School of Science and Engineering, Waseda University 3-4-1
HAND-SHAPED INTERFACE FOR INTUITIVE HUMAN- ROBOT COMMUNICATION THROUGH HAPTIC MEDIA RIKU HIKIJI AND SHUJI HASHIMOTO Department of Applied Physics, School of Science and Engineering, Waseda University 3-4-1
Chapter 2 Introduction to Haptics 2.1 Definition of Haptics
 Chapter 2 Introduction to Haptics 2.1 Definition of Haptics The word haptic originates from the Greek verb hapto to touch and therefore refers to the ability to touch and manipulate objects. The haptic
Chapter 2 Introduction to Haptics 2.1 Definition of Haptics The word haptic originates from the Greek verb hapto to touch and therefore refers to the ability to touch and manipulate objects. The haptic
System of Recognizing Human Action by Mining in Time-Series Motion Logs and Applications
 The 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-22, 2010, Taipei, Taiwan System of Recognizing Human Action by Mining in Time-Series Motion Logs and Applications
The 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-22, 2010, Taipei, Taiwan System of Recognizing Human Action by Mining in Time-Series Motion Logs and Applications
Some Issues on Integrating Telepresence Technology into Industrial Robotic Assembly
 Some Issues on Integrating Telepresence Technology into Industrial Robotic Assembly Gunther Reinhart and Marwan Radi Abstract Since the 1940s, many promising telepresence research results have been obtained.
Some Issues on Integrating Telepresence Technology into Industrial Robotic Assembly Gunther Reinhart and Marwan Radi Abstract Since the 1940s, many promising telepresence research results have been obtained.
Booklet of teaching units
 International Master Program in Mechatronic Systems for Rehabilitation Booklet of teaching units Third semester (M2 S1) Master Sciences de l Ingénieur Université Pierre et Marie Curie Paris 6 Boite 164,
International Master Program in Mechatronic Systems for Rehabilitation Booklet of teaching units Third semester (M2 S1) Master Sciences de l Ingénieur Université Pierre et Marie Curie Paris 6 Boite 164,
Simplifying Tool Usage in Teleoperative Tasks
 University of Pennsylvania ScholarlyCommons Technical Reports (CIS) Department of Computer & Information Science July 1993 Simplifying Tool Usage in Teleoperative Tasks Thomas Lindsay University of Pennsylvania
University of Pennsylvania ScholarlyCommons Technical Reports (CIS) Department of Computer & Information Science July 1993 Simplifying Tool Usage in Teleoperative Tasks Thomas Lindsay University of Pennsylvania
Introduction. Youngsun Ryuh 1, Kwang Mo Noh 2, Joon Gul Park 2 *
 Original Article J. of Biosystems Eng. 39(2):134-141. (2014. 6) http://dx.doi.org/10.5307/jbe.2014.39.2.134 Journal of Biosystems Engineering eissn : 2234-1862 pissn : 1738-1266 Tele-operating System of
Original Article J. of Biosystems Eng. 39(2):134-141. (2014. 6) http://dx.doi.org/10.5307/jbe.2014.39.2.134 Journal of Biosystems Engineering eissn : 2234-1862 pissn : 1738-1266 Tele-operating System of
Interacting within Virtual Worlds (based on talks by Greg Welch and Mark Mine)
") Interacting within Virtual Worlds (based on talks by Greg Welch and Mark Mine) Presentation Working in a virtual world Interaction principles Interaction examples Why VR in the First Place? Direct perception
Interacting within Virtual Worlds (based on talks by Greg Welch and Mark Mine) Presentation Working in a virtual world Interaction principles Interaction examples Why VR in the First Place? Direct perception
Chapter 1 Introduction
 Chapter 1 Introduction It is appropriate to begin the textbook on robotics with the definition of the industrial robot manipulator as given by the ISO 8373 standard. An industrial robot manipulator is
Chapter 1 Introduction It is appropriate to begin the textbook on robotics with the definition of the industrial robot manipulator as given by the ISO 8373 standard. An industrial robot manipulator is
Robotics Introduction Matteo Matteucci
 Robotics Introduction About me and my lectures 2 Lectures given by Matteo Matteucci +39 02 2399 3470 matteo.matteucci@polimi.it http://www.deib.polimi.it/ Research Topics Robotics and Autonomous Systems
Robotics Introduction About me and my lectures 2 Lectures given by Matteo Matteucci +39 02 2399 3470 matteo.matteucci@polimi.it http://www.deib.polimi.it/ Research Topics Robotics and Autonomous Systems
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute Use an example to explain what is admittance control? You may refer to exoskeleton
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute Use an example to explain what is admittance control? You may refer to exoskeleton
On Application of Virtual Fixtures as an Aid for Telemanipulation and Training
 On Application of Virtual Fixtures as an Aid for Telemanipulation and Training Shahram Payandeh and Zoran Stanisic Experimental Robotics Laboratory (ERL) School of Engineering Science Simon Fraser University
On Application of Virtual Fixtures as an Aid for Telemanipulation and Training Shahram Payandeh and Zoran Stanisic Experimental Robotics Laboratory (ERL) School of Engineering Science Simon Fraser University
Los Alamos. DOE Office of Scientific and Technical Information LA-U R-9&%
 LA-U R-9&% Title: Author(s): Submitted M: Virtual Reality and Telepresence Control of Robots Used in Hazardous Environments Lawrence E. Bronisz, ESA-MT Pete C. Pittman, ESA-MT DOE Office of Scientific
LA-U R-9&% Title: Author(s): Submitted M: Virtual Reality and Telepresence Control of Robots Used in Hazardous Environments Lawrence E. Bronisz, ESA-MT Pete C. Pittman, ESA-MT DOE Office of Scientific
Dipartimento di Elettronica Informazione e Bioingegneria Robotics
 Dipartimento di Elettronica Informazione e Bioingegneria Robotics Behavioral robotics @ 2014 Behaviorism behave is what organisms do Behaviorism is built on this assumption, and its goal is to promote
Dipartimento di Elettronica Informazione e Bioingegneria Robotics Behavioral robotics @ 2014 Behaviorism behave is what organisms do Behaviorism is built on this assumption, and its goal is to promote
EE631 Cooperating Autonomous Mobile Robots. Lecture 1: Introduction. Prof. Yi Guo ECE Department
 EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
Position and Force Control of Teleoperation System Based on PHANTOM Omni Robots
 International Journal of Mechanical Engineering and Robotics Research Vol. 5, No., January 6 Position and Force Control of Teleoperation System Based on PHANTOM Omni Robots Rong Kong, Xiucheng Dong, and
International Journal of Mechanical Engineering and Robotics Research Vol. 5, No., January 6 Position and Force Control of Teleoperation System Based on PHANTOM Omni Robots Rong Kong, Xiucheng Dong, and
PHYSICAL ROBOTS PROGRAMMING BY IMITATION USING VIRTUAL ROBOT PROTOTYPES
 Bulletin of the Transilvania University of Braşov Series I: Engineering Sciences Vol. 6 (55) No. 2-2013 PHYSICAL ROBOTS PROGRAMMING BY IMITATION USING VIRTUAL ROBOT PROTOTYPES A. FRATU 1 M. FRATU 2 Abstract:
Bulletin of the Transilvania University of Braşov Series I: Engineering Sciences Vol. 6 (55) No. 2-2013 PHYSICAL ROBOTS PROGRAMMING BY IMITATION USING VIRTUAL ROBOT PROTOTYPES A. FRATU 1 M. FRATU 2 Abstract:
Visuo-Haptic Interface for Teleoperation of Mobile Robot Exploration Tasks
 Visuo-Haptic Interface for Teleoperation of Mobile Robot Exploration Tasks Nikos C. Mitsou, Spyros V. Velanas and Costas S. Tzafestas Abstract With the spread of low-cost haptic devices, haptic interfaces
Visuo-Haptic Interface for Teleoperation of Mobile Robot Exploration Tasks Nikos C. Mitsou, Spyros V. Velanas and Costas S. Tzafestas Abstract With the spread of low-cost haptic devices, haptic interfaces
Information and Program
 Robotics 1 Information and Program Prof. Alessandro De Luca Robotics 1 1 Robotics 1 2017/18! First semester (12 weeks)! Monday, October 2, 2017 Monday, December 18, 2017! Courses of study (with this course
Robotics 1 Information and Program Prof. Alessandro De Luca Robotics 1 1 Robotics 1 2017/18! First semester (12 weeks)! Monday, October 2, 2017 Monday, December 18, 2017! Courses of study (with this course
Haptic Tele-Assembly over the Internet
 Haptic Tele-Assembly over the Internet Sandra Hirche, Bartlomiej Stanczyk, and Martin Buss Institute of Automatic Control Engineering, Technische Universität München D-829 München, Germany, http : //www.lsr.ei.tum.de
Haptic Tele-Assembly over the Internet Sandra Hirche, Bartlomiej Stanczyk, and Martin Buss Institute of Automatic Control Engineering, Technische Universität München D-829 München, Germany, http : //www.lsr.ei.tum.de
World Automation Congress
 ISORA028 Main Menu World Automation Congress Tenth International Symposium on Robotics with Applications Seville, Spain June 28th-July 1st, 2004 Design And Experiences With DLR Hand II J. Butterfaß, M.
ISORA028 Main Menu World Automation Congress Tenth International Symposium on Robotics with Applications Seville, Spain June 28th-July 1st, 2004 Design And Experiences With DLR Hand II J. Butterfaß, M.
Telemanipulation and Telestration for Microsurgery Summary
 Telemanipulation and Telestration for Microsurgery Summary Microsurgery presents an array of problems. For instance, current methodologies of Eye Surgery requires freehand manipulation of delicate structures
Telemanipulation and Telestration for Microsurgery Summary Microsurgery presents an array of problems. For instance, current methodologies of Eye Surgery requires freehand manipulation of delicate structures
An Improved Path Planning Method Based on Artificial Potential Field for a Mobile Robot
 BULGARIAN ACADEMY OF SCIENCES CYBERNETICS AND INFORMATION TECHNOLOGIES Volume 15, No Sofia 015 Print ISSN: 1311-970; Online ISSN: 1314-4081 DOI: 10.1515/cait-015-0037 An Improved Path Planning Method Based
BULGARIAN ACADEMY OF SCIENCES CYBERNETICS AND INFORMATION TECHNOLOGIES Volume 15, No Sofia 015 Print ISSN: 1311-970; Online ISSN: 1314-4081 DOI: 10.1515/cait-015-0037 An Improved Path Planning Method Based
Computer Assisted Medical Interventions
 Outline Computer Assisted Medical Interventions Force control, collaborative manipulation and telemanipulation Bernard BAYLE Joint course University of Strasbourg, University of Houston, Telecom Paris
Outline Computer Assisted Medical Interventions Force control, collaborative manipulation and telemanipulation Bernard BAYLE Joint course University of Strasbourg, University of Houston, Telecom Paris
Teleoperation. History and applications
 Teleoperation History and applications Notes You always need telesystem or human intervention as a backup at some point a human will need to take control embed in your design Roboticists automate what
Teleoperation History and applications Notes You always need telesystem or human intervention as a backup at some point a human will need to take control embed in your design Roboticists automate what
An Agent-Based Architecture for an Adaptive Human-Robot Interface
 An Agent-Based Architecture for an Adaptive Human-Robot Interface Kazuhiko Kawamura, Phongchai Nilas, Kazuhiko Muguruma, Julie A. Adams, and Chen Zhou Center for Intelligent Systems Vanderbilt University
An Agent-Based Architecture for an Adaptive Human-Robot Interface Kazuhiko Kawamura, Phongchai Nilas, Kazuhiko Muguruma, Julie A. Adams, and Chen Zhou Center for Intelligent Systems Vanderbilt University
Wireless Master-Slave Embedded Controller for a Teleoperated Anthropomorphic Robotic Arm with Gripping Force Sensing
 Wireless Master-Slave Embedded Controller for a Teleoperated Anthropomorphic Robotic Arm with Gripping Force Sensing Presented by: Benjamin B. Rhoades ECGR 6185 Adv. Embedded Systems January 16 th 2013
Wireless Master-Slave Embedded Controller for a Teleoperated Anthropomorphic Robotic Arm with Gripping Force Sensing Presented by: Benjamin B. Rhoades ECGR 6185 Adv. Embedded Systems January 16 th 2013
Lecture 9: Teleoperation
 ME 327: Design and Control of Haptic Systems Autumn 2018 Lecture 9: Teleoperation Allison M. Okamura Stanford University teleoperation history and examples the genesis of teleoperation? a Polygraph is
ME 327: Design and Control of Haptic Systems Autumn 2018 Lecture 9: Teleoperation Allison M. Okamura Stanford University teleoperation history and examples the genesis of teleoperation? a Polygraph is
ROBCHAIR - A SEMI-AUTONOMOUS WHEELCHAIR FOR DISABLED PEOPLE. G. Pires, U. Nunes, A. T. de Almeida
 ROBCHAIR - A SEMI-AUTONOMOUS WHEELCHAIR FOR DISABLED PEOPLE G. Pires, U. Nunes, A. T. de Almeida Institute of Systems and Robotics Department of Electrical Engineering University of Coimbra, Polo II 3030
ROBCHAIR - A SEMI-AUTONOMOUS WHEELCHAIR FOR DISABLED PEOPLE G. Pires, U. Nunes, A. T. de Almeida Institute of Systems and Robotics Department of Electrical Engineering University of Coimbra, Polo II 3030
Chapter 1 Introduction to Robotics
 Chapter 1 Introduction to Robotics PS: Most of the pages of this presentation were obtained and adapted from various sources in the internet. 1 I. Definition of Robotics Definition (Robot Institute of
Chapter 1 Introduction to Robotics PS: Most of the pages of this presentation were obtained and adapted from various sources in the internet. 1 I. Definition of Robotics Definition (Robot Institute of
Easy Robot Programming for Industrial Manipulators by Manual Volume Sweeping
 Easy Robot Programming for Industrial Manipulators by Manual Volume Sweeping *Yusuke MAEDA, Tatsuya USHIODA and Satoshi MAKITA (Yokohama National University) MAEDA Lab INTELLIGENT & INDUSTRIAL ROBOTICS
Easy Robot Programming for Industrial Manipulators by Manual Volume Sweeping *Yusuke MAEDA, Tatsuya USHIODA and Satoshi MAKITA (Yokohama National University) MAEDA Lab INTELLIGENT & INDUSTRIAL ROBOTICS
On Observer-based Passive Robust Impedance Control of a Robot Manipulator
 Journal of Mechanics Engineering and Automation 7 (2017) 71-78 doi: 10.17265/2159-5275/2017.02.003 D DAVID PUBLISHING On Observer-based Passive Robust Impedance Control of a Robot Manipulator CAO Sheng,
Journal of Mechanics Engineering and Automation 7 (2017) 71-78 doi: 10.17265/2159-5275/2017.02.003 D DAVID PUBLISHING On Observer-based Passive Robust Impedance Control of a Robot Manipulator CAO Sheng,
Shape Memory Alloy Actuator Controller Design for Tactile Displays
 34th IEEE Conference on Decision and Control New Orleans, Dec. 3-5, 995 Shape Memory Alloy Actuator Controller Design for Tactile Displays Robert D. Howe, Dimitrios A. Kontarinis, and William J. Peine
34th IEEE Conference on Decision and Control New Orleans, Dec. 3-5, 995 Shape Memory Alloy Actuator Controller Design for Tactile Displays Robert D. Howe, Dimitrios A. Kontarinis, and William J. Peine
Mobile Manipulation in der Telerobotik
 Mobile Manipulation in der Telerobotik Angelika Peer, Thomas Schauß, Ulrich Unterhinninghofen, Martin Buss angelika.peer@tum.de schauss@tum.de ulrich.unterhinninghofen@tum.de mb@tum.de Lehrstuhl für Steuerungs-
Mobile Manipulation in der Telerobotik Angelika Peer, Thomas Schauß, Ulrich Unterhinninghofen, Martin Buss angelika.peer@tum.de schauss@tum.de ulrich.unterhinninghofen@tum.de mb@tum.de Lehrstuhl für Steuerungs-
Sensors & Systems for Human Safety Assurance in Collaborative Exploration
 Sensing and Sensors CMU SCS RI 16-722 S09 Ned Fox nfox@andrew.cmu.edu Outline What is collaborative exploration? Humans sensing robots Robots sensing humans Overseers sensing both Inherently safe systems
Sensing and Sensors CMU SCS RI 16-722 S09 Ned Fox nfox@andrew.cmu.edu Outline What is collaborative exploration? Humans sensing robots Robots sensing humans Overseers sensing both Inherently safe systems
Multi-Modal Robot Skins: Proximity Servoing and its Applications
 Multi-Modal Robot Skins: Proximity Servoing and its Applications Workshop See and Touch: 1st Workshop on multimodal sensor-based robot control for HRI and soft manipulation at IROS 2015 Stefan Escaida
Multi-Modal Robot Skins: Proximity Servoing and its Applications Workshop See and Touch: 1st Workshop on multimodal sensor-based robot control for HRI and soft manipulation at IROS 2015 Stefan Escaida
An Excavator Simulator for Determining the Principles of Operator Efficiency for Hydraulic Multi-DOF Systems Mark Elton and Dr. Wayne Book ABSTRACT
 An Excavator Simulator for Determining the Principles of Operator Efficiency for Hydraulic Multi-DOF Systems Mark Elton and Dr. Wayne Book Georgia Institute of Technology ABSTRACT This paper discusses
An Excavator Simulator for Determining the Principles of Operator Efficiency for Hydraulic Multi-DOF Systems Mark Elton and Dr. Wayne Book Georgia Institute of Technology ABSTRACT This paper discusses
2. Introduction to Computer Haptics
 2. Introduction to Computer Haptics Seungmoon Choi, Ph.D. Assistant Professor Dept. of Computer Science and Engineering POSTECH Outline Basics of Force-Feedback Haptic Interfaces Introduction to Computer
2. Introduction to Computer Haptics Seungmoon Choi, Ph.D. Assistant Professor Dept. of Computer Science and Engineering POSTECH Outline Basics of Force-Feedback Haptic Interfaces Introduction to Computer
Development of a Sensor-Based Approach for Local Minima Recovery in Unknown Environments
 Development of a Sensor-Based Approach for Local Minima Recovery in Unknown Environments Danial Nakhaeinia 1, Tang Sai Hong 2 and Pierre Payeur 1 1 School of Electrical Engineering and Computer Science,
Development of a Sensor-Based Approach for Local Minima Recovery in Unknown Environments Danial Nakhaeinia 1, Tang Sai Hong 2 and Pierre Payeur 1 1 School of Electrical Engineering and Computer Science,
Summary of robot visual servo system
 Abstract Summary of robot visual servo system Xu Liu, Lingwen Tang School of Mechanical engineering, Southwest Petroleum University, Chengdu 610000, China In this paper, the survey of robot visual servoing
Abstract Summary of robot visual servo system Xu Liu, Lingwen Tang School of Mechanical engineering, Southwest Petroleum University, Chengdu 610000, China In this paper, the survey of robot visual servoing
Learning and Using Models of Kicking Motions for Legged Robots
 Learning and Using Models of Kicking Motions for Legged Robots Sonia Chernova and Manuela Veloso Computer Science Department Carnegie Mellon University Pittsburgh, PA 15213 {soniac, mmv}@cs.cmu.edu Abstract
Learning and Using Models of Kicking Motions for Legged Robots Sonia Chernova and Manuela Veloso Computer Science Department Carnegie Mellon University Pittsburgh, PA 15213 {soniac, mmv}@cs.cmu.edu Abstract
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute State one reason for investigating and building humanoid robot (4 pts) List two
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute State one reason for investigating and building humanoid robot (4 pts) List two
Performance Issues in Collaborative Haptic Training
 27 IEEE International Conference on Robotics and Automation Roma, Italy, 1-14 April 27 FrA4.4 Performance Issues in Collaborative Haptic Training Behzad Khademian and Keyvan Hashtrudi-Zaad Abstract This
27 IEEE International Conference on Robotics and Automation Roma, Italy, 1-14 April 27 FrA4.4 Performance Issues in Collaborative Haptic Training Behzad Khademian and Keyvan Hashtrudi-Zaad Abstract This
Structure Design of a Feeding Assistant Robot
 Structure Design of a Feeding Assistant Robot Chenling Zheng a, Liangchao Hou b and Jianyong Li c Shandong University of Science and Technology, Qingdao 266590, China. a2425614112@qq.com, b 931936225@qq.com,
Structure Design of a Feeding Assistant Robot Chenling Zheng a, Liangchao Hou b and Jianyong Li c Shandong University of Science and Technology, Qingdao 266590, China. a2425614112@qq.com, b 931936225@qq.com,
Peter Berkelman. ACHI/DigitalWorld
 Magnetic Levitation Haptic Peter Berkelman ACHI/DigitalWorld February 25, 2013 Outline: Haptics - Force Feedback Sample devices: Phantoms, Novint Falcon, Force Dimension Inertia, friction, hysteresis/backlash
Magnetic Levitation Haptic Peter Berkelman ACHI/DigitalWorld February 25, 2013 Outline: Haptics - Force Feedback Sample devices: Phantoms, Novint Falcon, Force Dimension Inertia, friction, hysteresis/backlash
COPRIN project. Contraintes, OPtimisation et Résolution par INtervalles. Constraints, OPtimization and Resolving through INtervals. 1/15. p.
 COPRIN project Contraintes, OPtimisation et Résolution par INtervalles Constraints, OPtimization and Resolving through INtervals 1/15. p.1/15 COPRIN project Contraintes, OPtimisation et Résolution par
COPRIN project Contraintes, OPtimisation et Résolution par INtervalles Constraints, OPtimization and Resolving through INtervals 1/15. p.1/15 COPRIN project Contraintes, OPtimisation et Résolution par
The Tele-operation of the Humanoid Robot -Whole Body Operation for Humanoid Robots in Contact with Environment-
 The Tele-operation of the Humanoid Robot -Whole Body Operation for Humanoid Robots in Contact with Environment- Hitoshi Hasunuma, Kensuke Harada, and Hirohisa Hirukawa System Technology Development Center,
The Tele-operation of the Humanoid Robot -Whole Body Operation for Humanoid Robots in Contact with Environment- Hitoshi Hasunuma, Kensuke Harada, and Hirohisa Hirukawa System Technology Development Center,
Parallel Robot Projects at Ohio University
 Parallel Robot Projects at Ohio University Robert L. Williams II with graduate students: John Hall, Brian Hopkins, Atul Joshi, Josh Collins, Jigar Vadia, Dana Poling, and Ron Nyzen And Special Thanks to:
Parallel Robot Projects at Ohio University Robert L. Williams II with graduate students: John Hall, Brian Hopkins, Atul Joshi, Josh Collins, Jigar Vadia, Dana Poling, and Ron Nyzen And Special Thanks to:
VIRTUAL ASSISTIVE ROBOTS FOR PLAY, LEARNING, AND COGNITIVE DEVELOPMENT
 3-59 Corbett Hall University of Alberta Edmonton, AB T6G 2G4 Ph: (780) 492-5422 Fx: (780) 492-1696 Email: atlab@ualberta.ca VIRTUAL ASSISTIVE ROBOTS FOR PLAY, LEARNING, AND COGNITIVE DEVELOPMENT Mengliao
3-59 Corbett Hall University of Alberta Edmonton, AB T6G 2G4 Ph: (780) 492-5422 Fx: (780) 492-1696 Email: atlab@ualberta.ca VIRTUAL ASSISTIVE ROBOTS FOR PLAY, LEARNING, AND COGNITIVE DEVELOPMENT Mengliao
Virtual Robots Module: An effective visualization tool for Robotics Toolbox
 Virtual Robots Module: An effective visualization tool for Robotics R. Sadanand Indian Institute of Technology Delhi New Delhi ratansadan@gmail.com R. G. Chittawadigi Amrita School of Bengaluru rg_chittawadigi@blr.am
Virtual Robots Module: An effective visualization tool for Robotics R. Sadanand Indian Institute of Technology Delhi New Delhi ratansadan@gmail.com R. G. Chittawadigi Amrita School of Bengaluru rg_chittawadigi@blr.am
Mekanisme Robot - 3 SKS (Robot Mechanism)
") Mekanisme Robot - 3 SKS (Robot Mechanism) Latifah Nurahmi, PhD!! latifah.nurahmi@gmail.com!! C.250 First Term - 2016/2017 Velocity Rate of change of position and orientation with respect to time Linear
Mekanisme Robot - 3 SKS (Robot Mechanism) Latifah Nurahmi, PhD!! latifah.nurahmi@gmail.com!! C.250 First Term - 2016/2017 Velocity Rate of change of position and orientation with respect to time Linear
A Feasibility Study of Time-Domain Passivity Approach for Bilateral Teleoperation of Mobile Manipulator
 International Conference on Control, Automation and Systems 2008 Oct. 14-17, 2008 in COEX, Seoul, Korea A Feasibility Study of Time-Domain Passivity Approach for Bilateral Teleoperation of Mobile Manipulator
International Conference on Control, Automation and Systems 2008 Oct. 14-17, 2008 in COEX, Seoul, Korea A Feasibility Study of Time-Domain Passivity Approach for Bilateral Teleoperation of Mobile Manipulator
Learning and Using Models of Kicking Motions for Legged Robots
 Learning and Using Models of Kicking Motions for Legged Robots Sonia Chernova and Manuela Veloso Computer Science Department Carnegie Mellon University Pittsburgh, PA 15213 {soniac, mmv}@cs.cmu.edu Abstract
Learning and Using Models of Kicking Motions for Legged Robots Sonia Chernova and Manuela Veloso Computer Science Department Carnegie Mellon University Pittsburgh, PA 15213 {soniac, mmv}@cs.cmu.edu Abstract
RESEARCHES IN THE DEVELOPPEMENT OF A SIMULATOR FOR THE TRAINING OF INTERVENTION ROBOT OPERATORS
 RESEARCHES IN THE DEVELOPPEMENT OF A SIMULATOR FOR THE TRAINING OF INTERVENTION ROBOT OPERATORS Eng. Ioan ANDREESCU, CS II, SC ICPSP SA Bucuresti, ROMANIA Eng. Nicolae MORARU, CS I, SC ICPSP SA Bucuresti,
RESEARCHES IN THE DEVELOPPEMENT OF A SIMULATOR FOR THE TRAINING OF INTERVENTION ROBOT OPERATORS Eng. Ioan ANDREESCU, CS II, SC ICPSP SA Bucuresti, ROMANIA Eng. Nicolae MORARU, CS I, SC ICPSP SA Bucuresti,
Nonlinear Adaptive Bilateral Control of Teleoperation Systems with Uncertain Dynamics and Kinematics
 Nonlinear Adaptive Bilateral Control of Teleoperation Systems with Uncertain Dynamics and Kinematics X. Liu, M. Tavakoli, and Q. Huang Abstract Research so far on adaptive bilateral control of master-slave
Nonlinear Adaptive Bilateral Control of Teleoperation Systems with Uncertain Dynamics and Kinematics X. Liu, M. Tavakoli, and Q. Huang Abstract Research so far on adaptive bilateral control of master-slave
Moving Obstacle Avoidance for Mobile Robot Moving on Designated Path
 Moving Obstacle Avoidance for Mobile Robot Moving on Designated Path Taichi Yamada 1, Yeow Li Sa 1 and Akihisa Ohya 1 1 Graduate School of Systems and Information Engineering, University of Tsukuba, 1-1-1,
Moving Obstacle Avoidance for Mobile Robot Moving on Designated Path Taichi Yamada 1, Yeow Li Sa 1 and Akihisa Ohya 1 1 Graduate School of Systems and Information Engineering, University of Tsukuba, 1-1-1,
Elements of Haptic Interfaces
 Elements of Haptic Interfaces Katherine J. Kuchenbecker Department of Mechanical Engineering and Applied Mechanics University of Pennsylvania kuchenbe@seas.upenn.edu Course Notes for MEAM 625, University
Elements of Haptic Interfaces Katherine J. Kuchenbecker Department of Mechanical Engineering and Applied Mechanics University of Pennsylvania kuchenbe@seas.upenn.edu Course Notes for MEAM 625, University
SELF-BALANCING MOBILE ROBOT TILTER
 Tomislav Tomašić Andrea Demetlika Prof. dr. sc. Mladen Crneković ISSN xxx-xxxx SELF-BALANCING MOBILE ROBOT TILTER Summary UDC 007.52, 62-523.8 In this project a remote controlled self-balancing mobile
Tomislav Tomašić Andrea Demetlika Prof. dr. sc. Mladen Crneković ISSN xxx-xxxx SELF-BALANCING MOBILE ROBOT TILTER Summary UDC 007.52, 62-523.8 In this project a remote controlled self-balancing mobile
Introduction to Robotics
 Jianwei Zhang zhang@informatik.uni-hamburg.de Universität Hamburg Fakultät für Mathematik, Informatik und Naturwissenschaften Technische Aspekte Multimodaler Systeme 14. June 2013 J. Zhang 1 Robot Control
Jianwei Zhang zhang@informatik.uni-hamburg.de Universität Hamburg Fakultät für Mathematik, Informatik und Naturwissenschaften Technische Aspekte Multimodaler Systeme 14. June 2013 J. Zhang 1 Robot Control
2.1 Dual-Arm Humanoid Robot A dual-arm humanoid robot is actuated by rubbertuators, which are McKibben pneumatic artiæcial muscles as shown in Figure
 Integrating Visual Feedback and Force Feedback in 3-D Collision Avoidance for a Dual-Arm Humanoid Robot S. Charoenseang, A. Srikaew, D. M. Wilkes, and K. Kawamura Center for Intelligent Systems Vanderbilt
Integrating Visual Feedback and Force Feedback in 3-D Collision Avoidance for a Dual-Arm Humanoid Robot S. Charoenseang, A. Srikaew, D. M. Wilkes, and K. Kawamura Center for Intelligent Systems Vanderbilt
Sliding Mode Control of Wheeled Mobile Robots
 2012 IACSIT Coimbatore Conferences IPCSIT vol. 28 (2012) (2012) IACSIT Press, Singapore Sliding Mode Control of Wheeled Mobile Robots Tisha Jose 1 + and Annu Abraham 2 Department of Electronics Engineering
2012 IACSIT Coimbatore Conferences IPCSIT vol. 28 (2012) (2012) IACSIT Press, Singapore Sliding Mode Control of Wheeled Mobile Robots Tisha Jose 1 + and Annu Abraham 2 Department of Electronics Engineering
Control of a Mobile Haptic Interface
 8 IEEE International Conference on Robotics and Automation Pasadena, CA, USA, May 19-3, 8 Control of a Mobile Haptic Interface Ulrich Unterhinninghofen, Thomas Schauß, and Martin uss Institute of Automatic
8 IEEE International Conference on Robotics and Automation Pasadena, CA, USA, May 19-3, 8 Control of a Mobile Haptic Interface Ulrich Unterhinninghofen, Thomas Schauß, and Martin uss Institute of Automatic
Smooth collision avoidance in human-robot coexisting environment
 The 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-22, 2010, Taipei, Taiwan Smooth collision avoidance in human-robot coexisting environment Yusue Tamura, Tomohiro
The 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-22, 2010, Taipei, Taiwan Smooth collision avoidance in human-robot coexisting environment Yusue Tamura, Tomohiro
KINECT CONTROLLED HUMANOID AND HELICOPTER
 KINECT CONTROLLED HUMANOID AND HELICOPTER Muffakham Jah College of Engineering & Technology Presented by : MOHAMMED KHAJA ILIAS PASHA ZESHAN ABDUL MAJEED AZMI SYED ABRAR MOHAMMED ISHRAQ SARID MOHAMMED
KINECT CONTROLLED HUMANOID AND HELICOPTER Muffakham Jah College of Engineering & Technology Presented by : MOHAMMED KHAJA ILIAS PASHA ZESHAN ABDUL MAJEED AZMI SYED ABRAR MOHAMMED ISHRAQ SARID MOHAMMED
EXPERIMENTAL BILATERAL CONTROL TELEMANIPULATION USING A VIRTUAL EXOSKELETON
 EXPERIMENTAL BILATERAL CONTROL TELEMANIPULATION USING A VIRTUAL EXOSKELETON Josep Amat 1, Alícia Casals 2, Manel Frigola 2, Enric Martín 2 1Robotics Institute. (IRI) UPC / CSIC Llorens Artigas 4-6, 2a
EXPERIMENTAL BILATERAL CONTROL TELEMANIPULATION USING A VIRTUAL EXOSKELETON Josep Amat 1, Alícia Casals 2, Manel Frigola 2, Enric Martín 2 1Robotics Institute. (IRI) UPC / CSIC Llorens Artigas 4-6, 2a
High-Level Programming for Industrial Robotics: using Gestures, Speech and Force Control
 High-Level Programming for Industrial Robotics: using Gestures, Speech and Force Control Pedro Neto, J. Norberto Pires, Member, IEEE Abstract Today, most industrial robots are programmed using the typical
High-Level Programming for Industrial Robotics: using Gestures, Speech and Force Control Pedro Neto, J. Norberto Pires, Member, IEEE Abstract Today, most industrial robots are programmed using the typical
Mobile Robots Exploration and Mapping in 2D
 ASEE 2014 Zone I Conference, April 3-5, 2014, University of Bridgeport, Bridgpeort, CT, USA. Mobile Robots Exploration and Mapping in 2D Sithisone Kalaya Robotics, Intelligent Sensing & Control (RISC)
ASEE 2014 Zone I Conference, April 3-5, 2014, University of Bridgeport, Bridgpeort, CT, USA. Mobile Robots Exploration and Mapping in 2D Sithisone Kalaya Robotics, Intelligent Sensing & Control (RISC)
Applying Model Mediation Method to a Mobile Robot Bilateral Teleoperation System Experiencing Time Delays in Communication
 Applying Model Mediation Method to a Mobile Robot Bilateral Teleoperation System Experiencing Time Delays in Communication B. Taner * M. İ. C. Dede E. Uzunoğlu İzmir Institute of Technology İzmir Institute
Applying Model Mediation Method to a Mobile Robot Bilateral Teleoperation System Experiencing Time Delays in Communication B. Taner * M. İ. C. Dede E. Uzunoğlu İzmir Institute of Technology İzmir Institute
Autonomous Wheelchair for Disabled People
 Proc. IEEE Int. Symposium on Industrial Electronics (ISIE97), Guimarães, 797-801. Autonomous Wheelchair for Disabled People G. Pires, N. Honório, C. Lopes, U. Nunes, A. T Almeida Institute of Systems and
Proc. IEEE Int. Symposium on Industrial Electronics (ISIE97), Guimarães, 797-801. Autonomous Wheelchair for Disabled People G. Pires, N. Honório, C. Lopes, U. Nunes, A. T Almeida Institute of Systems and