Tactile Interactions During Robot Assisted Surgical Interventions. Lakmal Seneviratne
|
|
|
- Anna Simpson
- 6 years ago
- Views:
Transcription
1 Tactile Interactions During Robot Assisted Surgical Interventions Lakmal Seneviratne Professor of Mechatronics Kings College London Professor of Mechanical Eng. Khalifa Univeristy, Abu Dhabi. 1
2 Overview 1. Surgical Robotics Soft Robots 2. Tactile Interactions - Learning 3. MRI Compatible Force Sensing 4. Haptic Interfaces 5. In Hand Manipulations 2


3 King s College London 3

4 Khalifa University Established in 2009 Vision - To be a leading international center of higher education and research 4
5 1. Surgical Robotics Soft Robots 5





6 Surgical Robotics - Da Vinci Surgical System 6



7 Surgical Robotics Robotic Catheterisation Hansen Medical: Robot-steered catheterization tool for cardiac ablation procedures. 7
8 MIS Tools enter the body through narrow openings and manipulate soft organs that can move, deform, or change in stiffness. Teleoperated Restricted access (through Trocar ports), minimal haptic feedback, rigid robot tools, confined space, safety-critical, real-time, bio-compatible, sterilized tools, MRI compatible. 8
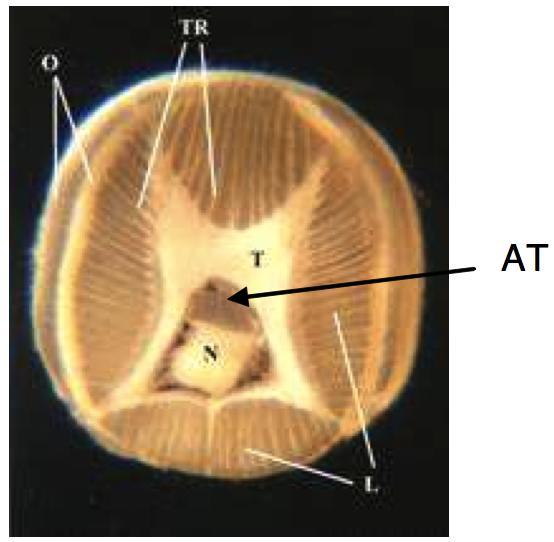
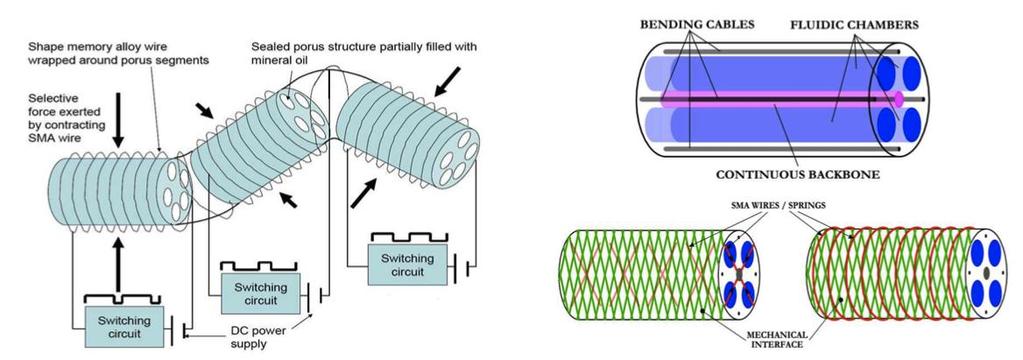

9 STIFF-FLOP - Inspiration 10
10 STIFF-FLOP Biological inspiration taken from octopus Soft, highly redundant manipulation device, Embedded distributed sensing cognitive development and intelligent control Learning and cognitive reasoning - learn from physical interactions with environment, 11
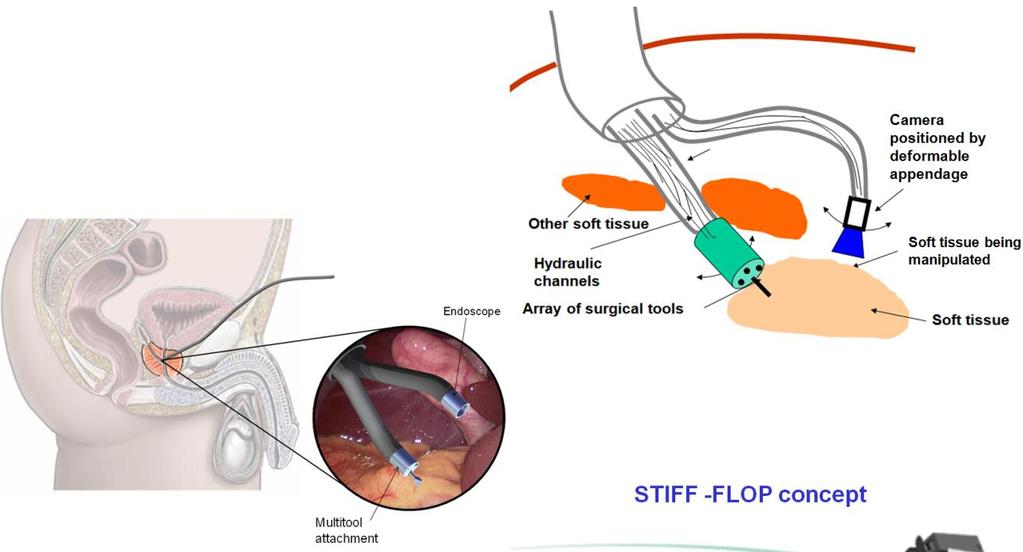

11 STIFF-FLOP STIFF-Flop Concept 12


12 Octopus-like robot arm EU Project OCTOPUS 13
13 2. Tactile Interfaces and Learning 14


14 Tissue Palpation Ex-Vivo Test Rig for Indentation Ex-vivo indentation tests on bovine liver - Measure Force Vs Displacement characteristics 15

15 Dual Maxwell Model for Palpation Bovine Liver Static indentation (6mm probe) Talal M. Al-ja'afreh, Yahya H. Zweiri, Lakmal D. Seneviratne, and Kaspar Althoefer, A New Soft Tissue Indentation Model for Estimating Force-Displacement' Characteristics using Circular Indenters. Proc IMechE,
 Horizontal Motion Fz (Normal Force)")

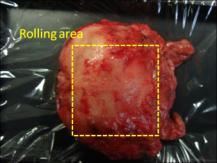
16 Rolling Palpations Ex-Vivo Test Rig (Rolling Device) Horizontal Motion Fz (Normal Force) Vertical Motion Fx (Drawbar Pull) Force/Torque Sensor Wheel Tissue 6-DOF robotic Manipulator 17




17 Rolling Palpations Soft Tissue Kidney sample with an embedded nodule Test results on pork kidney embedded with simulated tumor Liu, H, Noonan, D. P., Challacombe, B. J., Dasgupta, P., Seneviratne, L. D., Althoefer*, K, Rolling Mechanical Imaging for Tissue Abnormality Localization During Minimally Invasive Surgery, IEEE Transactions on Biomedical Engineering,


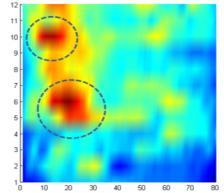
18 Rolling Imaging Rolling imaging from a silicone phantom embedded with 9 nodules 19


19 Rolling Images 20
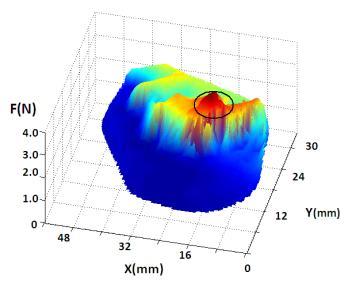
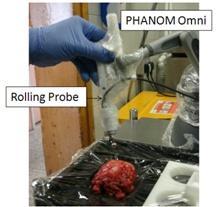
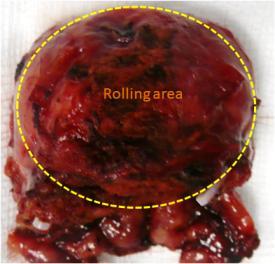
20 Rolling Indentation of Human Prostates Phantom Omni Rolling Probe 2D 3D 21

21 FE Model for RI 22



 73.40 1.")




22 3 nodules, 10 mm diameter - Arruda-Boyce model. FE model parameters from unixial tests. Material μ,shear Modulus (kpa) λ m, Locking stretch Mass Density (kg/m 3 ) Type of mesh Rubber (N1) CPS4R FE results are in good agreement with the corresponding experimental data, RMS range % Silicone (RTV6166 gel) CPS4R K. Sangpradit, H. Liu, P. Dasgupta, K. Althoefer, and L. Seneviratne, Finite Element Modelling of Rolling Indentation IEEE Transactions on Biomedical Engineering,
23 3. Force Sensing for Surgical Applications 24


24 Fibre Optic Uni-Axial Force Sensor P. Puangmali, H. Liu, K. Althoefer, and L. D. Seneviratne, Optical Fibre Sensor for Soft Tissue Investigation during Minimally Invasive Surgery, ICRA


25 Fibre Optic 3 Axis Force Sensor 3-Axis Force Sensor P Puangmali, H Liu, L D Seneviratne, P Dasgupta, K Althoefer. Miniature 3-Axis Distal Force Sensor for Minimally Invasive Surgical Palpation. IEEE/ASME Transactions on Mechatronics. 2011, 26
 consists of a force sensor and four displacement")


26 Fibre Optic Stiffness Sensor Force sensor The miniaturized sensor (11 mm diameter) consists of a force sensor and four displacement sensors Fibre optic technique is applied, MRI-compatible Displacement sensor Panagiotis Polygerinos, Lakmal D. Seneviratne, and Kaspar Althoefer, Triaxial Catheter-Tip Force Sensor for MRI-Guided Cardiac Procedures, IEEE/ASME Transactions on Mechatronics

27 Fibre Optic Stiffness Sensor Indentation Depth sensing (different Orientations) Force Sensing (a) (b) Mini FID θ z Calibration results of fibre-optic force sensor (c) Silicone Hongbin Liu, Jichun Li, Xiaojing Song, Lakmal Seneviratne, Kaspar Althoefer. "Rolling Indentation Probe for Tissue Abnormality Identification during Minimally Invasive Surgery", IEEE Transactions Robotics


28 Fibre Optic Force Sensing for Cardiac Catheters Wei Yao, Tobias Schaeffter, L Seneviratne. K Althoefer, MR-compatible Catheter for Cardiac Catheterization, ASME Journal of Medical Devices,


29 3-Axis Catheter Force Sensor 12Fr catheter-tip integrated with tri-axial force sensor. Fibre-optic catheter-tip force sensor. Panagiotis Polygerinos, Asghar Ataollahi, Tobias Schaeffter, Reza Razavi, Lakmal D. Seneviratne, and Kaspar Althoefer. MRI-Compatible Intensity-Modulated Force Sensor for Cardiac Catheterization Procedures. IEEE Transactions on Biomedical Engineering, 58 (3), pp
30 Airflow Force Sensor Constant pressure on 9mm Sphere. Displacement of the ball indicates a change in stiffness of the surface tissue. 31
 Friction free rolling over the tissue Array of Tactile Element (sphere diameter 4mm)")

31 Air Flow Tactile Probe Direct stiffness indication Tuneable force range (depend on the inlet air pressure) Friction free rolling over the tissue Array of Tactile Element (sphere diameter 4mm) Sensitivity , diameter 18mm Indika Wanninayake, Lakmal Seneviratne, Kaspar Althoefer, Novel Indentation Depth Measuring System for Stiffness Characterization in Soft Tissue Palpation. IEEE ICRA


32 Air Flow Tactile Probe 33 33

33 Airflow Force Sensor Experimental Evaluation The location of the 3 nodules on in the silicone phantom correspond to peaks. 34
34 Airflow Force Sensor Low friction sensor motion Simple design with potential for miniaturisation Can be built from MR-compatible materials 35


35 Pseudo-Haptic Feedback Real soft tissue Tissue properties Virtual soft tissue Tissue properties Rolling indentati on probe Haptic feedback RMIS system Force matrices of different indentation depths Robot arm Rolling probe Soft tissue Force sensor Palpation input device 36

36 Palpation simulation system with touch pad as input device 37

37 Palpation with Pseudo-Haptic Feedback z Virtual force Cursor v Real position x y Soft tissue Tumor 38


38 Pseudo-Haptic Feedback (a) cursor speed (b) cursor size Min Li, Lakmal Seneviratne, Kaspar Althoefer. Tissue Stiffness Simulation and Abnormality Localization using Pseudo-Haptic Feedback. IEEE ICRA

39 HANDLE EU FP7 IP UPMC (France), Shadow (UK), UC3M (Spain), FCTUC (Portugal), KCL (UK) ORU (Sweden), UHAM (Germany), CEA (France), IST (Portugal) Project Objectives Characterization of object affordances Learning and imitation of human strategies in handling tasks Improving skills through 'babbling' Autonomous in-hand dextrous manipulation 40


40 Learning Through Touch Hongbin Liu, Lakmal Seneviratne, Kaspar Althoefer. Real-Time Local Contact Shape and Pose Classification using a Tactile Array Sensor. IEEE ICRA
 e 2 e 3 e 1 λ 1 =30.1 λ 2 =8.")
 e 2 e 3 e 1 λ 1 =50.7 λ 2 =20.6 λ 3 =20.")
 e 2 e 1 λ 1 =35.1 λ 2 =16.")

41 Learning Through Touch Right angle edge e 1 e 2 e 3 λ 1 =121.9 λ 2 =22.5 λ 3 =7.5 vertex (corner) e 2 e 3 e 1 λ 1 =30.1 λ 2 =8.45 λ 3 =6.23 e 3 flat surface e 1 e 2 λ 1 =123.6 λ 2 =48.8 λ 3 =3.7 cylinder (r = 6 mm) e 2 e 3 e 1 λ 1 =50.7 λ 2 =20.6 λ 3 =20.5 e 1 e 3 concave surface (r = 45 mm) e 2 e 3 e 1 λ 1 =123.6 λ 2 =53.3 λ 3 =7.5 square (a = 8 mm) e 2 e 1 λ 1 =35.1 λ 2 =16.7 λ 3 =15.7 sphere (r = 6 mm) e 2 e 3 e 1 λ 1 =28.7 λ 2 =18.1 λ 3 =15.6 ring (r outer = 10 mm, r inner = 4 mm ) e 3 e 2 λ 1 =42.2 λ 2 =36.3 λ 3 =
42 Challenges Human-Robot system Human in loop to deal with uncertainties. Monitoring, error recovery Perception Multi-modal (Tactile, Vision, etc) Grasping and Manipulations Tactile Interactions Control, learn Soft systems 43

43 Ribeiro 44
Cutaneous Feedback of Fingertip Deformation and Vibration for Palpation in Robotic Surgery
 Cutaneous Feedback of Fingertip Deformation and Vibration for Palpation in Robotic Surgery Claudio Pacchierotti Domenico Prattichizzo Katherine J. Kuchenbecker Motivation Despite its expected clinical
Cutaneous Feedback of Fingertip Deformation and Vibration for Palpation in Robotic Surgery Claudio Pacchierotti Domenico Prattichizzo Katherine J. Kuchenbecker Motivation Despite its expected clinical
Novel Miniature MRI-Compatible Fiber-Optic Force Sensor for Cardiac Catherisation Procedures
 In: 1 IEEE International Conference on Robotics and Automation, Anchorage Convention District, May 3-8, 1, Anchorage, Alaska, USA, pp 598-63 Novel Miniature MRI-Compatible Fiber-Optic Force Sensor for
In: 1 IEEE International Conference on Robotics and Automation, Anchorage Convention District, May 3-8, 1, Anchorage, Alaska, USA, pp 598-63 Novel Miniature MRI-Compatible Fiber-Optic Force Sensor for
ROBOTICS research is becoming more intrusive and
 IEEE SENSORS JOURNAL, VOL. 14, NO. 3, MARCH 014 89 Magnetic Resonance-Compatible Tactile Force Sensor Using Fiber Optics and Vision Sensor Hui Xie, Student Member, IEEE, Allen Jiang, Helge A Wurdemann,
IEEE SENSORS JOURNAL, VOL. 14, NO. 3, MARCH 014 89 Magnetic Resonance-Compatible Tactile Force Sensor Using Fiber Optics and Vision Sensor Hui Xie, Student Member, IEEE, Allen Jiang, Helge A Wurdemann,
Haptic Feedback in Laparoscopic and Robotic Surgery
 Haptic Feedback in Laparoscopic and Robotic Surgery Dr. Warren Grundfest Professor Bioengineering, Electrical Engineering & Surgery UCLA, Los Angeles, California Acknowledgment This Presentation & Research
Haptic Feedback in Laparoscopic and Robotic Surgery Dr. Warren Grundfest Professor Bioengineering, Electrical Engineering & Surgery UCLA, Los Angeles, California Acknowledgment This Presentation & Research
Tactile Sensation Imaging for Artificial Palpation
 Tactile Sensation Imaging for Artificial Palpation Jong-Ha Lee 1, Chang-Hee Won 1, Kaiguo Yan 2, Yan Yu 2, and Lydia Liao 3 1 Control, Sensor, Network, and Perception (CSNAP) Laboratory, Temple University,
Tactile Sensation Imaging for Artificial Palpation Jong-Ha Lee 1, Chang-Hee Won 1, Kaiguo Yan 2, Yan Yu 2, and Lydia Liao 3 1 Control, Sensor, Network, and Perception (CSNAP) Laboratory, Temple University,
Department of Robotics Ritsumeikan University
 Department of Robotics Ritsumeikan University Shinichi Hirai Dept. Robotics Ritsumeikan Univ. Hanoi Institute of Technology Hanoi, Vietnam, Dec. 20, 2008 http://www.ritsumei.ac.jp/se/rm/robo/index-e.htm
Department of Robotics Ritsumeikan University Shinichi Hirai Dept. Robotics Ritsumeikan Univ. Hanoi Institute of Technology Hanoi, Vietnam, Dec. 20, 2008 http://www.ritsumei.ac.jp/se/rm/robo/index-e.htm
Design of an MRI Compatible Haptic Interface
 Design of an MRI Compatible Haptic Interface Melih Turkseven and Jun Ueda Abstract This paper proposes an MRI-compatible, 1- axis force sensing unit which is designed to be used as a haptic interface on
Design of an MRI Compatible Haptic Interface Melih Turkseven and Jun Ueda Abstract This paper proposes an MRI-compatible, 1- axis force sensing unit which is designed to be used as a haptic interface on
SMart wearable Robotic Teleoperated surgery
 SMart wearable Robotic Teleoperated surgery This project has received funding from the European Union s Horizon 2020 research and innovation programme under grant agreement No 732515 Context Minimally
SMart wearable Robotic Teleoperated surgery This project has received funding from the European Union s Horizon 2020 research and innovation programme under grant agreement No 732515 Context Minimally
ROBOTICS ENG YOUSEF A. SHATNAWI INTRODUCTION
 ROBOTICS INTRODUCTION THIS COURSE IS TWO PARTS Mobile Robotics. Locomotion (analogous to manipulation) (Legged and wheeled robots). Navigation and obstacle avoidance algorithms. Robot Vision Sensors and
ROBOTICS INTRODUCTION THIS COURSE IS TWO PARTS Mobile Robotics. Locomotion (analogous to manipulation) (Legged and wheeled robots). Navigation and obstacle avoidance algorithms. Robot Vision Sensors and
Wednesday, October 29, :00-04:00pm EB: 3546D. TELEOPERATION OF MOBILE MANIPULATORS By Yunyi Jia Advisor: Prof.
 Wednesday, October 29, 2014 02:00-04:00pm EB: 3546D TELEOPERATION OF MOBILE MANIPULATORS By Yunyi Jia Advisor: Prof. Ning Xi ABSTRACT Mobile manipulators provide larger working spaces and more flexibility
Wednesday, October 29, 2014 02:00-04:00pm EB: 3546D TELEOPERATION OF MOBILE MANIPULATORS By Yunyi Jia Advisor: Prof. Ning Xi ABSTRACT Mobile manipulators provide larger working spaces and more flexibility
Small Occupancy Robotic Mechanisms for Endoscopic Surgery
 Small Occupancy Robotic Mechanisms for Endoscopic Surgery Yuki Kobayashi, Shingo Chiyoda, Kouichi Watabe, Masafumi Okada, and Yoshihiko Nakamura Department of Mechano-Informatics, The University of Tokyo,
Small Occupancy Robotic Mechanisms for Endoscopic Surgery Yuki Kobayashi, Shingo Chiyoda, Kouichi Watabe, Masafumi Okada, and Yoshihiko Nakamura Department of Mechano-Informatics, The University of Tokyo,
Biomimetic Design of Actuators, Sensors and Robots
 Biomimetic Design of Actuators, Sensors and Robots Takashi Maeno, COE Member of autonomous-cooperative robotics group Department of Mechanical Engineering Keio University Abstract Biological life has greatly
Biomimetic Design of Actuators, Sensors and Robots Takashi Maeno, COE Member of autonomous-cooperative robotics group Department of Mechanical Engineering Keio University Abstract Biological life has greatly
A miniature all-optical photoacoustic imaging probe
 A miniature all-optical photoacoustic imaging probe Edward Z. Zhang * and Paul C. Beard Department of Medical Physics and Bioengineering, University College London, Gower Street, London WC1E 6BT, UK http://www.medphys.ucl.ac.uk/research/mle/index.htm
A miniature all-optical photoacoustic imaging probe Edward Z. Zhang * and Paul C. Beard Department of Medical Physics and Bioengineering, University College London, Gower Street, London WC1E 6BT, UK http://www.medphys.ucl.ac.uk/research/mle/index.htm
I. INTRODUCTION II. INTRA-OPERATIVE TUMOR LOCALIZATION USING FORCE-BASED SENSING
 Intra-operative Tumor Localization in Robot-assisted Minimally Invasive Surgery: A Review Min Li, Hongbin Liu, Allen Jiang, Lakmal D. Seneviratne, Prokar Dasgupta, Helge Wurdemann, Kaspar Althoefer 1 Abstract
Intra-operative Tumor Localization in Robot-assisted Minimally Invasive Surgery: A Review Min Li, Hongbin Liu, Allen Jiang, Lakmal D. Seneviratne, Prokar Dasgupta, Helge Wurdemann, Kaspar Althoefer 1 Abstract
2. Introduction to Computer Haptics
 2. Introduction to Computer Haptics Seungmoon Choi, Ph.D. Assistant Professor Dept. of Computer Science and Engineering POSTECH Outline Basics of Force-Feedback Haptic Interfaces Introduction to Computer
2. Introduction to Computer Haptics Seungmoon Choi, Ph.D. Assistant Professor Dept. of Computer Science and Engineering POSTECH Outline Basics of Force-Feedback Haptic Interfaces Introduction to Computer
Integrating Tactile and Force Feedback with Finite Element Models
 Integrating Tactile and Force Feedback with Finite Element Models Christopher R. Wagner, Douglas P. Perrin, Ross L. Feller, and Robert D. Howe Division of Engineering and Applied Sciences Harvard University,
Integrating Tactile and Force Feedback with Finite Element Models Christopher R. Wagner, Douglas P. Perrin, Ross L. Feller, and Robert D. Howe Division of Engineering and Applied Sciences Harvard University,
Haptic Feedback in Robot Assisted Minimal Invasive Surgery
 K. Bhatia Haptic Feedback in Robot Assisted Minimal Invasive Surgery 1 / 33 MIN Faculty Department of Informatics Haptic Feedback in Robot Assisted Minimal Invasive Surgery Kavish Bhatia University of
K. Bhatia Haptic Feedback in Robot Assisted Minimal Invasive Surgery 1 / 33 MIN Faculty Department of Informatics Haptic Feedback in Robot Assisted Minimal Invasive Surgery Kavish Bhatia University of
Virtual Reality as Human Interface and its application to Medical Ultrasonic diagnosis
 14 INTERNATIONAL JOURNAL OF APPLIED BIOMEDICAL ENGINEERING VOL.1, NO.1 2008 Virtual Reality as Human Interface and its application to Medical Ultrasonic diagnosis Kazuhiko Hamamoto, ABSTRACT Virtual reality
14 INTERNATIONAL JOURNAL OF APPLIED BIOMEDICAL ENGINEERING VOL.1, NO.1 2008 Virtual Reality as Human Interface and its application to Medical Ultrasonic diagnosis Kazuhiko Hamamoto, ABSTRACT Virtual reality
Peter Berkelman. ACHI/DigitalWorld
 Magnetic Levitation Haptic Peter Berkelman ACHI/DigitalWorld February 25, 2013 Outline: Haptics - Force Feedback Sample devices: Phantoms, Novint Falcon, Force Dimension Inertia, friction, hysteresis/backlash
Magnetic Levitation Haptic Peter Berkelman ACHI/DigitalWorld February 25, 2013 Outline: Haptics - Force Feedback Sample devices: Phantoms, Novint Falcon, Force Dimension Inertia, friction, hysteresis/backlash
Medical robotics and Image Guided Therapy (IGT) Bogdan M. Maris, PhD Temporary Assistant Professor
 Bogdan M. Maris, PhD Temporary Assistant Professor") Medical robotics and Image Guided Therapy (IGT) Bogdan M. Maris, PhD Temporary Assistant Professor E-mail bogdan.maris@univr.it Medical Robotics History, current and future applications Robots are Accurate
Medical robotics and Image Guided Therapy (IGT) Bogdan M. Maris, PhD Temporary Assistant Professor E-mail bogdan.maris@univr.it Medical Robotics History, current and future applications Robots are Accurate
A surgical simulator for training surgeons in a few tasks related to minimally invasive surgery
 A surgical simulator for training surgeons in a few tasks related to minimally invasive surgery Inventor: Kirana Kumara P Associate Professor, Department of Automobile Engineering, Dayananda Sagar College
A surgical simulator for training surgeons in a few tasks related to minimally invasive surgery Inventor: Kirana Kumara P Associate Professor, Department of Automobile Engineering, Dayananda Sagar College
Robotics and Artificial Intelligence. Rodney Brooks Director, MIT Computer Science and Artificial Intelligence Laboratory CTO, irobot Corp
 Robotics and Artificial Intelligence Rodney Brooks Director, MIT Computer Science and Artificial Intelligence Laboratory CTO, irobot Corp Report Documentation Page Form Approved OMB No. 0704-0188 Public
Robotics and Artificial Intelligence Rodney Brooks Director, MIT Computer Science and Artificial Intelligence Laboratory CTO, irobot Corp Report Documentation Page Form Approved OMB No. 0704-0188 Public
Haptic Reproduction and Interactive Visualization of a Beating Heart Based on Cardiac Morphology
 MEDINFO 2001 V. Patel et al. (Eds) Amsterdam: IOS Press 2001 IMIA. All rights reserved Haptic Reproduction and Interactive Visualization of a Beating Heart Based on Cardiac Morphology Megumi Nakao a, Masaru
MEDINFO 2001 V. Patel et al. (Eds) Amsterdam: IOS Press 2001 IMIA. All rights reserved Haptic Reproduction and Interactive Visualization of a Beating Heart Based on Cardiac Morphology Megumi Nakao a, Masaru
Autonomous Surgical Robotics
 Nicolás Pérez de Olaguer Santamaría Autonomous Surgical Robotics 1 / 29 MIN Faculty Department of Informatics Autonomous Surgical Robotics Nicolás Pérez de Olaguer Santamaría University of Hamburg Faculty
Nicolás Pérez de Olaguer Santamaría Autonomous Surgical Robotics 1 / 29 MIN Faculty Department of Informatics Autonomous Surgical Robotics Nicolás Pérez de Olaguer Santamaría University of Hamburg Faculty
Chapter 1 Introduction
 Chapter 1 Introduction It is appropriate to begin the textbook on robotics with the definition of the industrial robot manipulator as given by the ISO 8373 standard. An industrial robot manipulator is
Chapter 1 Introduction It is appropriate to begin the textbook on robotics with the definition of the industrial robot manipulator as given by the ISO 8373 standard. An industrial robot manipulator is
Robotic System Simulation and Modeling Stefan Jörg Robotic and Mechatronic Center
 Robotic System Simulation and ing Stefan Jörg Robotic and Mechatronic Center Outline Introduction The SAFROS Robotic System Simulator Robotic System ing Conclusions Folie 2 DLR s Mirosurge: A versatile
Robotic System Simulation and ing Stefan Jörg Robotic and Mechatronic Center Outline Introduction The SAFROS Robotic System Simulator Robotic System ing Conclusions Folie 2 DLR s Mirosurge: A versatile
Current Status and Future of Medical Virtual Reality
 2011.08.16 Medical VR Current Status and Future of Medical Virtual Reality Naoto KUME, Ph.D. Assistant Professor of Kyoto University Hospital 1. History of Medical Virtual Reality Virtual reality (VR)
2011.08.16 Medical VR Current Status and Future of Medical Virtual Reality Naoto KUME, Ph.D. Assistant Professor of Kyoto University Hospital 1. History of Medical Virtual Reality Virtual reality (VR)
Computer Assisted Medical Interventions
 Outline Computer Assisted Medical Interventions Force control, collaborative manipulation and telemanipulation Bernard BAYLE Joint course University of Strasbourg, University of Houston, Telecom Paris
Outline Computer Assisted Medical Interventions Force control, collaborative manipulation and telemanipulation Bernard BAYLE Joint course University of Strasbourg, University of Houston, Telecom Paris
Dongming Gan, BSc, PhD
 Dongming Gan, BSc, PhD Assistant Professor Robotics Institute/Mechanical Engineering Department, Khalifa University of Science, Technology and Research, Abu Dhabi, UAE Airport Road, P.O.Box 127788, Abu
Dongming Gan, BSc, PhD Assistant Professor Robotics Institute/Mechanical Engineering Department, Khalifa University of Science, Technology and Research, Abu Dhabi, UAE Airport Road, P.O.Box 127788, Abu
HUMAN Robot Cooperation Techniques in Surgery
 HUMAN Robot Cooperation Techniques in Surgery Alícia Casals Institute for Bioengineering of Catalonia (IBEC), Universitat Politècnica de Catalunya (UPC), Barcelona, Spain alicia.casals@upc.edu Keywords:
HUMAN Robot Cooperation Techniques in Surgery Alícia Casals Institute for Bioengineering of Catalonia (IBEC), Universitat Politècnica de Catalunya (UPC), Barcelona, Spain alicia.casals@upc.edu Keywords:
Haptics CS327A
 Haptics CS327A - 217 hap tic adjective relating to the sense of touch or to the perception and manipulation of objects using the senses of touch and proprioception 1 2 Slave Master 3 Courtesy of Walischmiller
Haptics CS327A - 217 hap tic adjective relating to the sense of touch or to the perception and manipulation of objects using the senses of touch and proprioception 1 2 Slave Master 3 Courtesy of Walischmiller
Shrinkable, stiffness-controllable soft manipulator based on a bio-inspired antagonistic actuation principle
 Agostino Stilli, Helge A Wurdemann and Kaspar Althoefer, Shrinkable, stiffness-controllable soft manipulator based on a bio-inspired antagonistic actuation principle, in IEEE International Conference on
Agostino Stilli, Helge A Wurdemann and Kaspar Althoefer, Shrinkable, stiffness-controllable soft manipulator based on a bio-inspired antagonistic actuation principle, in IEEE International Conference on
Methods for Haptic Feedback in Teleoperated Robotic Surgery
 Young Group 5 1 Methods for Haptic Feedback in Teleoperated Robotic Surgery Paper Review Jessie Young Group 5: Haptic Interface for Surgical Manipulator System March 12, 2012 Paper Selection: A. M. Okamura.
Young Group 5 1 Methods for Haptic Feedback in Teleoperated Robotic Surgery Paper Review Jessie Young Group 5: Haptic Interface for Surgical Manipulator System March 12, 2012 Paper Selection: A. M. Okamura.
Modeling and Experimental Studies of a Novel 6DOF Haptic Device
 Proceedings of The Canadian Society for Mechanical Engineering Forum 2010 CSME FORUM 2010 June 7-9, 2010, Victoria, British Columbia, Canada Modeling and Experimental Studies of a Novel DOF Haptic Device
Proceedings of The Canadian Society for Mechanical Engineering Forum 2010 CSME FORUM 2010 June 7-9, 2010, Victoria, British Columbia, Canada Modeling and Experimental Studies of a Novel DOF Haptic Device
Using Simulation to Design Control Strategies for Robotic No-Scar Surgery
 Using Simulation to Design Control Strategies for Robotic No-Scar Surgery Antonio DE DONNO 1, Florent NAGEOTTE, Philippe ZANNE, Laurent GOFFIN and Michel de MATHELIN LSIIT, University of Strasbourg/CNRS,
Using Simulation to Design Control Strategies for Robotic No-Scar Surgery Antonio DE DONNO 1, Florent NAGEOTTE, Philippe ZANNE, Laurent GOFFIN and Michel de MATHELIN LSIIT, University of Strasbourg/CNRS,
LS-DYNA Simulation of in vivo Surgical Robot Mobility
 9 th International LS-DYNA Users Conference Simulation Technology (2) LS-DYNA Simulation of in vivo Surgical Robot Mobility Mark Rentschler and John D. Reid Department of Mechanical Engineering University
9 th International LS-DYNA Users Conference Simulation Technology (2) LS-DYNA Simulation of in vivo Surgical Robot Mobility Mark Rentschler and John D. Reid Department of Mechanical Engineering University
Variable-stiffness Sheets Obtained using Fabric Jamming and their Applications in Force Displays Takashi Mitsuda
 Variable-stiffness Sheets Obtained using Fabric Jamming and their Applications in Force Displays Takashi Mitsuda To cite this article: Takashi Mitsuda (217): Variable-stiffness Sheets Obtained using Fabric
Variable-stiffness Sheets Obtained using Fabric Jamming and their Applications in Force Displays Takashi Mitsuda To cite this article: Takashi Mitsuda (217): Variable-stiffness Sheets Obtained using Fabric
Haptic Virtual Fixtures for Robot-Assisted Manipulation
 Haptic Virtual Fixtures for Robot-Assisted Manipulation Jake J. Abbott, Panadda Marayong, and Allison M. Okamura Department of Mechanical Engineering, The Johns Hopkins University {jake.abbott, pmarayong,
Haptic Virtual Fixtures for Robot-Assisted Manipulation Jake J. Abbott, Panadda Marayong, and Allison M. Okamura Department of Mechanical Engineering, The Johns Hopkins University {jake.abbott, pmarayong,
A Feasibility Study of Time-Domain Passivity Approach for Bilateral Teleoperation of Mobile Manipulator
 International Conference on Control, Automation and Systems 2008 Oct. 14-17, 2008 in COEX, Seoul, Korea A Feasibility Study of Time-Domain Passivity Approach for Bilateral Teleoperation of Mobile Manipulator
International Conference on Control, Automation and Systems 2008 Oct. 14-17, 2008 in COEX, Seoul, Korea A Feasibility Study of Time-Domain Passivity Approach for Bilateral Teleoperation of Mobile Manipulator
Information and Program
 Robotics 1 Information and Program Prof. Alessandro De Luca Robotics 1 1 Robotics 1 2017/18! First semester (12 weeks)! Monday, October 2, 2017 Monday, December 18, 2017! Courses of study (with this course
Robotics 1 Information and Program Prof. Alessandro De Luca Robotics 1 1 Robotics 1 2017/18! First semester (12 weeks)! Monday, October 2, 2017 Monday, December 18, 2017! Courses of study (with this course
New Long Stroke Vibration Shaker Design using Linear Motor Technology
 New Long Stroke Vibration Shaker Design using Linear Motor Technology The Modal Shop, Inc. A PCB Group Company Patrick Timmons Calibration Systems Engineer Mark Schiefer Senior Scientist Long Stroke Shaker
New Long Stroke Vibration Shaker Design using Linear Motor Technology The Modal Shop, Inc. A PCB Group Company Patrick Timmons Calibration Systems Engineer Mark Schiefer Senior Scientist Long Stroke Shaker
Chapter 1. Introduction
 Chapter 1 Introduction Robotics technology has recently found extensive use in surgical and therapeutic procedures. The purpose of this chapter is to give an overview of the robotic tools which may be
Chapter 1 Introduction Robotics technology has recently found extensive use in surgical and therapeutic procedures. The purpose of this chapter is to give an overview of the robotic tools which may be
3D FINITE ELEMENT ANALYSIS FOR NON- ASYMMETRY STRUCTURE ANTENNA FOR MICROWAVE ABLATION THERAPY
 2011 International Conference on Biomedical Engineering and Technology IPCBEE vol.11 (2011) (2011) IACSIT Press, Singapore D FINITE ELEMENT ANALYSIS FOR NON- ASYMMETRY STRUCTURE ANTENNA FOR MICROWAVE ABLATION
2011 International Conference on Biomedical Engineering and Technology IPCBEE vol.11 (2011) (2011) IACSIT Press, Singapore D FINITE ELEMENT ANALYSIS FOR NON- ASYMMETRY STRUCTURE ANTENNA FOR MICROWAVE ABLATION
Shape Memory Alloy Actuator Controller Design for Tactile Displays
 34th IEEE Conference on Decision and Control New Orleans, Dec. 3-5, 995 Shape Memory Alloy Actuator Controller Design for Tactile Displays Robert D. Howe, Dimitrios A. Kontarinis, and William J. Peine
34th IEEE Conference on Decision and Control New Orleans, Dec. 3-5, 995 Shape Memory Alloy Actuator Controller Design for Tactile Displays Robert D. Howe, Dimitrios A. Kontarinis, and William J. Peine
Università di Roma La Sapienza. Medical Robotics. A Teleoperation System for Research in MIRS. Marilena Vendittelli
 Università di Roma La Sapienza Medical Robotics A Teleoperation System for Research in MIRS Marilena Vendittelli the DLR teleoperation system slave three versatile robots MIRO light-weight: weight < 10
Università di Roma La Sapienza Medical Robotics A Teleoperation System for Research in MIRS Marilena Vendittelli the DLR teleoperation system slave three versatile robots MIRO light-weight: weight < 10
Finger Posture and Shear Force Measurement using Fingernail Sensors: Initial Experimentation
 Proceedings of the 1 IEEE International Conference on Robotics & Automation Seoul, Korea? May 16, 1 Finger Posture and Shear Force Measurement using Fingernail Sensors: Initial Experimentation Stephen
Proceedings of the 1 IEEE International Conference on Robotics & Automation Seoul, Korea? May 16, 1 Finger Posture and Shear Force Measurement using Fingernail Sensors: Initial Experimentation Stephen
5HDO 7LPH 6XUJLFDO 6LPXODWLRQ ZLWK +DSWLF 6HQVDWLRQ DV &ROODERUDWHG :RUNV EHWZHHQ -DSDQ DQG *HUPDQ\
 nsuzuki@jikei.ac.jp 1016 N. Suzuki et al. 1). The system should provide a design for the user and determine surgical procedures based on 3D model reconstructed from the patient's data. 2). The system must
nsuzuki@jikei.ac.jp 1016 N. Suzuki et al. 1). The system should provide a design for the user and determine surgical procedures based on 3D model reconstructed from the patient's data. 2). The system must
Introduction. Parametric Imaging. The Ultrasound Research Interface: A New Tool for Biomedical Investigations
 The Ultrasound Research Interface: A New Tool for Biomedical Investigations Shelby Brunke, Laurent Pelissier, Kris Dickie, Jim Zagzebski, Tim Hall, Thaddeus Wilson Siemens Medical Systems, Issaquah WA
The Ultrasound Research Interface: A New Tool for Biomedical Investigations Shelby Brunke, Laurent Pelissier, Kris Dickie, Jim Zagzebski, Tim Hall, Thaddeus Wilson Siemens Medical Systems, Issaquah WA
Chapter 2 Introduction to Haptics 2.1 Definition of Haptics
 Chapter 2 Introduction to Haptics 2.1 Definition of Haptics The word haptic originates from the Greek verb hapto to touch and therefore refers to the ability to touch and manipulate objects. The haptic
Chapter 2 Introduction to Haptics 2.1 Definition of Haptics The word haptic originates from the Greek verb hapto to touch and therefore refers to the ability to touch and manipulate objects. The haptic
Proprioception & force sensing
 Proprioception & force sensing Roope Raisamo Tampere Unit for Computer-Human Interaction (TAUCHI) School of Information Sciences University of Tampere, Finland Based on material by Jussi Rantala, Jukka
Proprioception & force sensing Roope Raisamo Tampere Unit for Computer-Human Interaction (TAUCHI) School of Information Sciences University of Tampere, Finland Based on material by Jussi Rantala, Jukka
CS277 - Experimental Haptics Lecture 1. Introduction to Haptics
 CS277 - Experimental Haptics Lecture 1 Introduction to Haptics Haptic Interfaces Enables physical interaction with virtual objects Haptic Rendering Potential Fields Polygonal Meshes Implicit Surfaces Volumetric
CS277 - Experimental Haptics Lecture 1 Introduction to Haptics Haptic Interfaces Enables physical interaction with virtual objects Haptic Rendering Potential Fields Polygonal Meshes Implicit Surfaces Volumetric
Performance Issues in Collaborative Haptic Training
 27 IEEE International Conference on Robotics and Automation Roma, Italy, 1-14 April 27 FrA4.4 Performance Issues in Collaborative Haptic Training Behzad Khademian and Keyvan Hashtrudi-Zaad Abstract This
27 IEEE International Conference on Robotics and Automation Roma, Italy, 1-14 April 27 FrA4.4 Performance Issues in Collaborative Haptic Training Behzad Khademian and Keyvan Hashtrudi-Zaad Abstract This
Development of Flexible Pneumatic Cylinder with Backdrivability and Its Application
 Development of Flexible Pneumatic Cylinder with Backdrivability and Its Application Takafumi Morimoto, Mohd Aliff, Tetsuya Akagi, and Shujiro Dohta Department of Intelligent Mechanical Engineering, Okayama
Development of Flexible Pneumatic Cylinder with Backdrivability and Its Application Takafumi Morimoto, Mohd Aliff, Tetsuya Akagi, and Shujiro Dohta Department of Intelligent Mechanical Engineering, Okayama
RECENT advances in nanotechnology have enabled
 Haptics Enabled Offline AFM Image Analysis Bhatti A., Nahavandi S. and Hossny M. Abstract Current advancements in nanotechnology are dependent on the capabilities that can enable nano-scientists to extend
Haptics Enabled Offline AFM Image Analysis Bhatti A., Nahavandi S. and Hossny M. Abstract Current advancements in nanotechnology are dependent on the capabilities that can enable nano-scientists to extend
Five-fingered Robot Hand using Ultrasonic Motors and Elastic Elements *
 Proceedings of the 2005 IEEE International Conference on Robotics and Automation Barcelona, Spain, April 2005 Five-fingered Robot Hand using Ultrasonic Motors and Elastic Elements * Ikuo Yamano Department
Proceedings of the 2005 IEEE International Conference on Robotics and Automation Barcelona, Spain, April 2005 Five-fingered Robot Hand using Ultrasonic Motors and Elastic Elements * Ikuo Yamano Department
Implementation of Force Feedback in Robotic Surgical Systems
 Biomedical & Pharmacology Journal Vol. 8(1), 365-370 (2015) Implementation of Force Feedback in Robotic Surgical Systems C. J. ARABIND and D. KATHIRVELU Biomedical Engineering Department, SRM University,
Biomedical & Pharmacology Journal Vol. 8(1), 365-370 (2015) Implementation of Force Feedback in Robotic Surgical Systems C. J. ARABIND and D. KATHIRVELU Biomedical Engineering Department, SRM University,
Teleoperation with Sensor/Actuator Asymmetry: Task Performance with Partial Force Feedback
 Teleoperation with Sensor/Actuator Asymmetry: Task Performance with Partial Force Wagahta Semere, Masaya Kitagawa and Allison M. Okamura Department of Mechanical Engineering The Johns Hopkins University
Teleoperation with Sensor/Actuator Asymmetry: Task Performance with Partial Force Wagahta Semere, Masaya Kitagawa and Allison M. Okamura Department of Mechanical Engineering The Johns Hopkins University
AC : MEDICAL ROBOTICS LABORATORY FOR BIOMEDICAL ENGINEERS
 AC 2008-1272: MEDICAL ROBOTICS LABORATORY FOR BIOMEDICAL ENGINEERS Shahin Sirouspour, McMaster University http://www.ece.mcmaster.ca/~sirouspour/ Mahyar Fotoohi, Quanser Inc Pawel Malysz, McMaster University
AC 2008-1272: MEDICAL ROBOTICS LABORATORY FOR BIOMEDICAL ENGINEERS Shahin Sirouspour, McMaster University http://www.ece.mcmaster.ca/~sirouspour/ Mahyar Fotoohi, Quanser Inc Pawel Malysz, McMaster University
Cancer Detection by means of Mechanical Palpation
 Cancer Detection by means of Mechanical Palpation Design Team Paige Burke, Robert Eley Spencer Heyl, Margaret McGuire, Alan Radcliffe Design Advisor Prof. Kai Tak Wan Sponsor Massachusetts General Hospital
Cancer Detection by means of Mechanical Palpation Design Team Paige Burke, Robert Eley Spencer Heyl, Margaret McGuire, Alan Radcliffe Design Advisor Prof. Kai Tak Wan Sponsor Massachusetts General Hospital
Object Exploration Using a Three-Axis Tactile Sensing Information
 Journal of Computer Science 7 (4): 499-504, 2011 ISSN 1549-3636 2011 Science Publications Object Exploration Using a Three-Axis Tactile Sensing Information 1,2 S.C. Abdullah, 1 Jiro Wada, 1 Masahiro Ohka
Journal of Computer Science 7 (4): 499-504, 2011 ISSN 1549-3636 2011 Science Publications Object Exploration Using a Three-Axis Tactile Sensing Information 1,2 S.C. Abdullah, 1 Jiro Wada, 1 Masahiro Ohka
Push Path Improvement with Policy based Reinforcement Learning
 1 Push Path Improvement with Policy based Reinforcement Learning Junhu He TAMS Department of Informatics University of Hamburg Cross-modal Interaction In Natural and Artificial Cognitive Systems (CINACS)
1 Push Path Improvement with Policy based Reinforcement Learning Junhu He TAMS Department of Informatics University of Hamburg Cross-modal Interaction In Natural and Artificial Cognitive Systems (CINACS)
Texture recognition using force sensitive resistors
 Texture recognition using force sensitive resistors SAYED, Muhammad, DIAZ GARCIA,, Jose Carlos and ALBOUL, Lyuba Available from Sheffield Hallam University Research
Texture recognition using force sensitive resistors SAYED, Muhammad, DIAZ GARCIA,, Jose Carlos and ALBOUL, Lyuba Available from Sheffield Hallam University Research
* Intelli Robotic Wheel Chair for Specialty Operations & Physically Challenged
 ADVANCED ROBOTICS SOLUTIONS * Intelli Mobile Robot for Multi Specialty Operations * Advanced Robotic Pick and Place Arm and Hand System * Automatic Color Sensing Robot using PC * AI Based Image Capturing
ADVANCED ROBOTICS SOLUTIONS * Intelli Mobile Robot for Multi Specialty Operations * Advanced Robotic Pick and Place Arm and Hand System * Automatic Color Sensing Robot using PC * AI Based Image Capturing
Elements of Haptic Interfaces
 Elements of Haptic Interfaces Katherine J. Kuchenbecker Department of Mechanical Engineering and Applied Mechanics University of Pennsylvania kuchenbe@seas.upenn.edu Course Notes for MEAM 625, University
Elements of Haptic Interfaces Katherine J. Kuchenbecker Department of Mechanical Engineering and Applied Mechanics University of Pennsylvania kuchenbe@seas.upenn.edu Course Notes for MEAM 625, University
Benefits of using haptic devices in textile architecture
 28 September 2 October 2009, Universidad Politecnica de Valencia, Spain Alberto DOMINGO and Carlos LAZARO (eds.) Benefits of using haptic devices in textile architecture Javier SANCHEZ *, Joan SAVALL a
28 September 2 October 2009, Universidad Politecnica de Valencia, Spain Alberto DOMINGO and Carlos LAZARO (eds.) Benefits of using haptic devices in textile architecture Javier SANCHEZ *, Joan SAVALL a
Evaluation of Five-finger Haptic Communication with Network Delay
 Tactile Communication Haptic Communication Network Delay Evaluation of Five-finger Haptic Communication with Network Delay To realize tactile communication, we clarify some issues regarding how delay affects
Tactile Communication Haptic Communication Network Delay Evaluation of Five-finger Haptic Communication with Network Delay To realize tactile communication, we clarify some issues regarding how delay affects
A VR Training System with Haptic Force Feedback for the Robotic Endovascular Surge
 Proceedings of the 2018 IEEE International Conference on Robotics and Biomimetics December 12-15, 2018, Kuala Lumpur, Malaysia A VR Training System with Haptic Force Feedback for the Robotic Endovascular
Proceedings of the 2018 IEEE International Conference on Robotics and Biomimetics December 12-15, 2018, Kuala Lumpur, Malaysia A VR Training System with Haptic Force Feedback for the Robotic Endovascular
From Encoding Sound to Encoding Touch
 From Encoding Sound to Encoding Touch Toktam Mahmoodi King s College London, UK http://www.ctr.kcl.ac.uk/toktam/index.htm ETSI STQ Workshop, May 2017 Immersing a person into the real environment with Very
From Encoding Sound to Encoding Touch Toktam Mahmoodi King s College London, UK http://www.ctr.kcl.ac.uk/toktam/index.htm ETSI STQ Workshop, May 2017 Immersing a person into the real environment with Very
Multi-Modal Robot Skins: Proximity Servoing and its Applications
 Multi-Modal Robot Skins: Proximity Servoing and its Applications Workshop See and Touch: 1st Workshop on multimodal sensor-based robot control for HRI and soft manipulation at IROS 2015 Stefan Escaida
Multi-Modal Robot Skins: Proximity Servoing and its Applications Workshop See and Touch: 1st Workshop on multimodal sensor-based robot control for HRI and soft manipulation at IROS 2015 Stefan Escaida
Summer Engineering Research Internship for US Students (SERIUS) Department of Biomedical Engineering. (www.bioeng.nus.edu.
 Department of Biomedical Engineering. (www.bioeng.nus.edu.") Summer Engineering Research Internship for US Students (SERIUS) Host Department: Department of Biomedical Engineering (www.bioeng.nus.edu.sg) BME Project 1 Host department Department of Biomedical Engineering
Summer Engineering Research Internship for US Students (SERIUS) Host Department: Department of Biomedical Engineering (www.bioeng.nus.edu.sg) BME Project 1 Host department Department of Biomedical Engineering
MAGNETIC LEVITATION SUSPENSION CONTROL SYSTEM FOR REACTION WHEEL
 IMPACT: International Journal of Research in Engineering & Technology (IMPACT: IJRET) ISSN 2321-8843 Vol. 1, Issue 4, Sep 2013, 1-6 Impact Journals MAGNETIC LEVITATION SUSPENSION CONTROL SYSTEM FOR REACTION
IMPACT: International Journal of Research in Engineering & Technology (IMPACT: IJRET) ISSN 2321-8843 Vol. 1, Issue 4, Sep 2013, 1-6 Impact Journals MAGNETIC LEVITATION SUSPENSION CONTROL SYSTEM FOR REACTION
Introduction to robotics. Md. Ferdous Alam, Lecturer, MEE, SUST
 Introduction to robotics Md. Ferdous Alam, Lecturer, MEE, SUST Hello class! Let s watch a video! So, what do you think? It s cool, isn t it? The dedication is not! A brief history The first digital and
Introduction to robotics Md. Ferdous Alam, Lecturer, MEE, SUST Hello class! Let s watch a video! So, what do you think? It s cool, isn t it? The dedication is not! A brief history The first digital and
NCCT IEEE PROJECTS ADVANCED ROBOTICS SOLUTIONS. Latest Projects, in various Domains. Promise for the Best Projects
 NCCT Promise for the Best Projects IEEE PROJECTS in various Domains Latest Projects, 2009-2010 ADVANCED ROBOTICS SOLUTIONS EMBEDDED SYSTEM PROJECTS Microcontrollers VLSI DSP Matlab Robotics ADVANCED ROBOTICS
NCCT Promise for the Best Projects IEEE PROJECTS in various Domains Latest Projects, 2009-2010 ADVANCED ROBOTICS SOLUTIONS EMBEDDED SYSTEM PROJECTS Microcontrollers VLSI DSP Matlab Robotics ADVANCED ROBOTICS
Robust Haptic Teleoperation of a Mobile Manipulation Platform
 Robust Haptic Teleoperation of a Mobile Manipulation Platform Jaeheung Park and Oussama Khatib Stanford AI Laboratory Stanford University http://robotics.stanford.edu Abstract. This paper presents a new
Robust Haptic Teleoperation of a Mobile Manipulation Platform Jaeheung Park and Oussama Khatib Stanford AI Laboratory Stanford University http://robotics.stanford.edu Abstract. This paper presents a new
A novel trocar-less, multi-point of view, magnetic actuated laparoscope
 A novel trocar-less, multi-point of view, magnetic actuated laparoscope T. Ranzani, Student Member, IEEE, M. Silvestri, A. Argiolas, M. Vatteroni, A. Menciassi, Member, IEEE Abstract As a result of the
A novel trocar-less, multi-point of view, magnetic actuated laparoscope T. Ranzani, Student Member, IEEE, M. Silvestri, A. Argiolas, M. Vatteroni, A. Menciassi, Member, IEEE Abstract As a result of the
Selective Stimulation to Skin Receptors by Suction Pressure Control
 Selective Stimulation to Skin Receptors by Suction Pressure Control Yasutoshi MAKINO 1 and Hiroyuki SHINODA 1 1 Department of Information Physics and Computing, Graduate School of Information Science and
Selective Stimulation to Skin Receptors by Suction Pressure Control Yasutoshi MAKINO 1 and Hiroyuki SHINODA 1 1 Department of Information Physics and Computing, Graduate School of Information Science and
Telemanipulation and Telestration for Microsurgery Summary
 Telemanipulation and Telestration for Microsurgery Summary Microsurgery presents an array of problems. For instance, current methodologies of Eye Surgery requires freehand manipulation of delicate structures
Telemanipulation and Telestration for Microsurgery Summary Microsurgery presents an array of problems. For instance, current methodologies of Eye Surgery requires freehand manipulation of delicate structures
This is a repository copy of Analyzing the 3D Printed Material Tango Plus FLX930 for Using in Self-Folding Structure.
 This is a repository copy of Analyzing the 3D Printed Material Tango Plus FLX930 for Using in Self-Folding Structure. White Rose Research Online URL for this paper: http://eprints.whiterose.ac.uk/105531/
This is a repository copy of Analyzing the 3D Printed Material Tango Plus FLX930 for Using in Self-Folding Structure. White Rose Research Online URL for this paper: http://eprints.whiterose.ac.uk/105531/
Force feedback interfaces & applications
 Force feedback interfaces & applications Roope Raisamo Tampere Unit for Computer-Human Interaction (TAUCHI) School of Information Sciences University of Tampere, Finland Based on material by Jukka Raisamo,
Force feedback interfaces & applications Roope Raisamo Tampere Unit for Computer-Human Interaction (TAUCHI) School of Information Sciences University of Tampere, Finland Based on material by Jukka Raisamo,
Flexible Active Touch Using 2.5D Display Generating Tactile and Force Sensations
 This is the accepted version of the following article: ICIC Express Letters 6(12):2995-3000 January 2012, which has been published in final form at http://www.ijicic.org/el-6(12).htm Flexible Active Touch
This is the accepted version of the following article: ICIC Express Letters 6(12):2995-3000 January 2012, which has been published in final form at http://www.ijicic.org/el-6(12).htm Flexible Active Touch
Novel machine interface for scaled telesurgery
 Novel machine interface for scaled telesurgery S. Clanton, D. Wang, Y. Matsuoka, D. Shelton, G. Stetten SPIE Medical Imaging, vol. 5367, pp. 697-704. San Diego, Feb. 2004. A Novel Machine Interface for
Novel machine interface for scaled telesurgery S. Clanton, D. Wang, Y. Matsuoka, D. Shelton, G. Stetten SPIE Medical Imaging, vol. 5367, pp. 697-704. San Diego, Feb. 2004. A Novel Machine Interface for
Design of the frame and arms of a Master for robotic surgery
 Design of the frame and arms of a Master for robotic surgery P.W. Poels DCT 2007.090 Traineeship report Coach(es): dr. ir. P.C.J.N. Rosielle ir. R. Hendrix Technische Universiteit Eindhoven Department
Design of the frame and arms of a Master for robotic surgery P.W. Poels DCT 2007.090 Traineeship report Coach(es): dr. ir. P.C.J.N. Rosielle ir. R. Hendrix Technische Universiteit Eindhoven Department
Sensing self motion. Key points: Why robots need self-sensing Sensors for proprioception in biological systems in robot systems
 Sensing self motion Key points: Why robots need self-sensing Sensors for proprioception in biological systems in robot systems Position sensing Velocity and acceleration sensing Force sensing Vision based
Sensing self motion Key points: Why robots need self-sensing Sensors for proprioception in biological systems in robot systems Position sensing Velocity and acceleration sensing Force sensing Vision based
HAND-SHAPED INTERFACE FOR INTUITIVE HUMAN- ROBOT COMMUNICATION THROUGH HAPTIC MEDIA
 HAND-SHAPED INTERFACE FOR INTUITIVE HUMAN- ROBOT COMMUNICATION THROUGH HAPTIC MEDIA RIKU HIKIJI AND SHUJI HASHIMOTO Department of Applied Physics, School of Science and Engineering, Waseda University 3-4-1
HAND-SHAPED INTERFACE FOR INTUITIVE HUMAN- ROBOT COMMUNICATION THROUGH HAPTIC MEDIA RIKU HIKIJI AND SHUJI HASHIMOTO Department of Applied Physics, School of Science and Engineering, Waseda University 3-4-1
Effects of Geared Motor Characteristics on Tactile Perception of Tissue Stiffness
 Effects of Geared Motor Characteristics on Tactile Perception of Tissue Stiffness Jeff Longnion +, Jacob Rosen+, PhD, Mika Sinanan++, MD, PhD, Blake Hannaford+, PhD, ++ Department of Electrical Engineering,
Effects of Geared Motor Characteristics on Tactile Perception of Tissue Stiffness Jeff Longnion +, Jacob Rosen+, PhD, Mika Sinanan++, MD, PhD, Blake Hannaford+, PhD, ++ Department of Electrical Engineering,
Bibliography. Conclusion
 the almost identical time measured in the real and the virtual execution, and the fact that the real execution with indirect vision to be slower than the manipulation on the simulated environment. The
the almost identical time measured in the real and the virtual execution, and the fact that the real execution with indirect vision to be slower than the manipulation on the simulated environment. The
Sensing the Texture of Surfaces by Anthropomorphic Soft Fingertips with Multi-Modal Sensors
 Sensing the Texture of Surfaces by Anthropomorphic Soft Fingertips with Multi-Modal Sensors Yasunori Tada, Koh Hosoda, Yusuke Yamasaki, and Minoru Asada Department of Adaptive Machine Systems, HANDAI Frontier
Sensing the Texture of Surfaces by Anthropomorphic Soft Fingertips with Multi-Modal Sensors Yasunori Tada, Koh Hosoda, Yusuke Yamasaki, and Minoru Asada Department of Adaptive Machine Systems, HANDAI Frontier
In response to communication: 5000 Ser 342PS/10/hlh 14 SEP 1994
 10/13/94 Dean Chang Graduate Research Assistant Center for Design Research Stanford University 560 Panama St. Stanford, California 94305-2232 Dr. Harold L. Hawkins Office of Naval Research Code 3421 (Code
10/13/94 Dean Chang Graduate Research Assistant Center for Design Research Stanford University 560 Panama St. Stanford, California 94305-2232 Dr. Harold L. Hawkins Office of Naval Research Code 3421 (Code
VALERI - A COLLABORATIVE MOBILE MANIPULATOR FOR AEROSPACE PRODUCTION. CLAWAR 2016, London, UK Fraunhofer IFF Robotersysteme
 VALERI - A COLLABORATIVE MOBILE MANIPULATOR FOR AEROSPACE PRODUCTION CLAWAR 2016, London, UK Fraunhofer IFF Robotersysteme Fraunhofer IFF, Magdeburg 2016 VALERI - A collaborative mobile manipulator for
VALERI - A COLLABORATIVE MOBILE MANIPULATOR FOR AEROSPACE PRODUCTION CLAWAR 2016, London, UK Fraunhofer IFF Robotersysteme Fraunhofer IFF, Magdeburg 2016 VALERI - A collaborative mobile manipulator for
Design of Cylindrical Whole-hand Haptic Interface using Electrocutaneous Display
 Design of Cylindrical Whole-hand Haptic Interface using Electrocutaneous Display Hiroyuki Kajimoto 1,2 1 The University of Electro-Communications 1-5-1 Chofugaoka, Chofu, Tokyo 182-8585 Japan 2 Japan Science
Design of Cylindrical Whole-hand Haptic Interface using Electrocutaneous Display Hiroyuki Kajimoto 1,2 1 The University of Electro-Communications 1-5-1 Chofugaoka, Chofu, Tokyo 182-8585 Japan 2 Japan Science
INNOVATIVE MICRO-WALKING ROBOT USING FLEXIBLE MICROACTUATOR
 INNOVATIVE MICRO-WALKING ROBOT USING FLEXIBLE MICROACTUATOR Sai Dinesh P 1, Roshin Raveendra 2, Aditya K 2, Pramod Sreedharan 2 and Ganesha Udupa 2 * 1 Department of Electronics and Communication Engineering,
INNOVATIVE MICRO-WALKING ROBOT USING FLEXIBLE MICROACTUATOR Sai Dinesh P 1, Roshin Raveendra 2, Aditya K 2, Pramod Sreedharan 2 and Ganesha Udupa 2 * 1 Department of Electronics and Communication Engineering,
Multisensory Based Manipulation Architecture
 Marine Robot and Dexterous Manipulatin for Enabling Multipurpose Intevention Missions WP7 Multisensory Based Manipulation Architecture GIRONA 2012 Y2 Review Meeting Pedro J Sanz IRS Lab http://www.irs.uji.es/
Marine Robot and Dexterous Manipulatin for Enabling Multipurpose Intevention Missions WP7 Multisensory Based Manipulation Architecture GIRONA 2012 Y2 Review Meeting Pedro J Sanz IRS Lab http://www.irs.uji.es/
Haptic Rendering CPSC / Sonny Chan University of Calgary
 Haptic Rendering CPSC 599.86 / 601.86 Sonny Chan University of Calgary Today s Outline Announcements Human haptic perception Anatomy of a visual-haptic simulation Virtual wall and potential field rendering
Haptic Rendering CPSC 599.86 / 601.86 Sonny Chan University of Calgary Today s Outline Announcements Human haptic perception Anatomy of a visual-haptic simulation Virtual wall and potential field rendering
Image Guided Robotic Assisted Surgical Training System using LabVIEW and CompactRIO
 Image Guided Robotic Assisted Surgical Training System using LabVIEW and CompactRIO Weimin Huang 1, Tao Yang 1, Liang Jing Yang 2, Chee Kong Chui 2, Jimmy Liu 1, Jiayin Zhou 1, Jing Zhang 1, Yi Su 3, Stephen
Image Guided Robotic Assisted Surgical Training System using LabVIEW and CompactRIO Weimin Huang 1, Tao Yang 1, Liang Jing Yang 2, Chee Kong Chui 2, Jimmy Liu 1, Jiayin Zhou 1, Jing Zhang 1, Yi Su 3, Stephen
Computer Haptics and Applications
 Computer Haptics and Applications EURON Summer School 2003 Cagatay Basdogan, Ph.D. College of Engineering Koc University, Istanbul, 80910 (http://network.ku.edu.tr/~cbasdogan) Resources: EURON Summer School
Computer Haptics and Applications EURON Summer School 2003 Cagatay Basdogan, Ph.D. College of Engineering Koc University, Istanbul, 80910 (http://network.ku.edu.tr/~cbasdogan) Resources: EURON Summer School
A Big Challenge of Surgical Robot Haptic Feedback
 32 4 2013 8 Chinese Journal of Biomedical Engineering Vol. 32 No. 4 August 2013 * 200120 R318 A 0258-8021 2013 04-0499-05 A Big Challenge of Surgical Robot Haptic Feedback GUO Song YANG Ming-Jie TAN Jun
32 4 2013 8 Chinese Journal of Biomedical Engineering Vol. 32 No. 4 August 2013 * 200120 R318 A 0258-8021 2013 04-0499-05 A Big Challenge of Surgical Robot Haptic Feedback GUO Song YANG Ming-Jie TAN Jun
CS277 - Experimental Haptics Lecture 2. Haptic Rendering
 CS277 - Experimental Haptics Lecture 2 Haptic Rendering Outline Announcements Human haptic perception Anatomy of a visual-haptic simulation Virtual wall and potential field rendering A note on timing...
CS277 - Experimental Haptics Lecture 2 Haptic Rendering Outline Announcements Human haptic perception Anatomy of a visual-haptic simulation Virtual wall and potential field rendering A note on timing...
Highly Stretchable Optical Sensors for Pressure, Strain, and Curvature Measurement
 25 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) Congress Center Hamburg Sept 28 - Oct 2, 25. Hamburg, Germany Highly Stretchable Optical Sensors for Pressure, Strain, and
25 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) Congress Center Hamburg Sept 28 - Oct 2, 25. Hamburg, Germany Highly Stretchable Optical Sensors for Pressure, Strain, and
Haptic interaction. Ruth Aylett
 Haptic interaction Ruth Aylett Contents Haptic definition Haptic model Haptic devices Measuring forces Haptic Technologies Haptics refers to manual interactions with environments, such as sensorial exploration
Haptic interaction Ruth Aylett Contents Haptic definition Haptic model Haptic devices Measuring forces Haptic Technologies Haptics refers to manual interactions with environments, such as sensorial exploration
DEVELOPING SENSORS FOR SURGERY SUPPORT ROBOTS Mona Kudo
 DEVELOPING SENSORS FOR SURGERY SUPPORT ROBOTS 20328 Mona Kudo 1. INTRODUCTION Today, many kinds of surgery support robots are used in medical procedures all over economically advanced countries such as
DEVELOPING SENSORS FOR SURGERY SUPPORT ROBOTS 20328 Mona Kudo 1. INTRODUCTION Today, many kinds of surgery support robots are used in medical procedures all over economically advanced countries such as