II. TELEOPERATION FRAMEWORK. A. Forward mapping
|
|
|
- Sydney Hunter
- 5 years ago
- Views:
Transcription

1
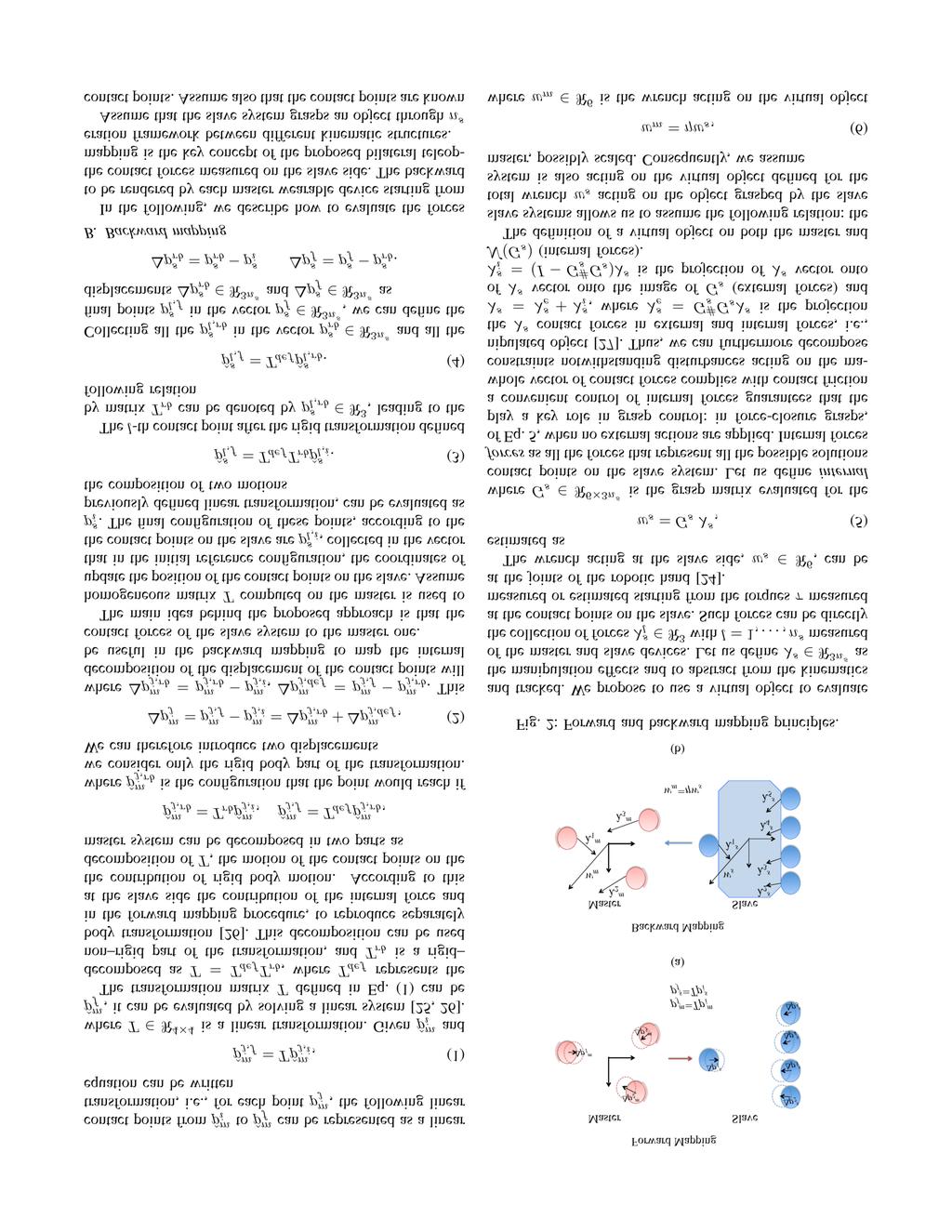
2 tracked using a Leap Motion IR camera (Leap Motion, Inc, San Francisco, CA, USA) and the forces are displayed on the fingertips using wearable thimbles. Cutaneous feedback provides the user with a reliable sensation of telepresence, as the cutaneous force feedback is perceived where it is expected (i.e., the fingertip) and provides the operator with a direct and co-located perception of the contact force, even though kinesthesia is missing. The advantages of this master system is twofold. Firstly, the master workspace is not limited by the workspace of the devices thanks to their extreme wearability and portability. This furthermore enables the simultaneous stimulation of several interaction points on the human hand. Secondly, the teleoperation system is intrinsically stable [15]. In fact, an interesting approach to stabilize telemanipulation loops consists in using sensory substitution techniques, such as vibrotactile [16], auditory or visual channels [17] to provide feedback at the master side. Similar to sensory substitution, in [15] the authors presented a novel feedback technique named sensory subtraction, as it subtracts the destabilizing kinesthetic part of the full haptic interaction to leave only cutaneous cues, thus making the teleoperation system stable. Another important issue to be addressed in case of multicontact master and slave devices concerns the correspondence problem between the human hand and the slave device, that typically have dissimilar kinematic structures. In this work, we introduce a mapping algorithm able to abstract from the number of interaction/contact points defined at the master/slave sides, and that can compute the force feedback also when the master system includes wearable devices. We have defined as forward mapping the steps necessary to reproduce on the slave side the user motion captured on the master side, while backward mapping deals with the algorithm that computes the correct forces to be displayed back to the user, starting from the signals acquired at the slave side. The idea is pictorially represented in Fig. 1. The teleoperation framework introduced in this work can also deal with slave devices different from a robotic hand. Systems like the one presented in [18], where a swarm of UAVs was used to cooperatively grasp an object, could implement the same mapping strategy to transfer the human hand motion to some robot formation parameters and to feed back to the user information about the forces applied on the slave side. Differently from [19, 20], the virtual object used here lacks a defined shape, but it is instead defined by the interaction/contact points. The rest of the paper is organized as it follows. In Section II the object-based mapping is described. Section III deals with the description of the experimental setup and ends with some preliminary results on a peg in a hole task. Finally, in Section IV conclusion and future work are outlined. A. Forward mapping II. TELEOPERATION FRAMEWORK The issues in transferring the motion of the human hand onto robotic systems have been investigated with different approaches [19]. In this paper, we take advantage of a virtual object to abstract from the kinematics of master and slave. This object-based mapping has been pioneered in telemanipulation by Griffin et al. [21]. The main idea is to use a virtual object to translate the motion of the human hand in the variation of some object parameters, such as the position of the center and the radius of a circle. In [19] and [22] the object-based mapping has been extended to 3-D cases and to an arbitrary number of reference points necessary to define the virtual objects. One of the main advantages of object-based mappings is that the definition of virtual objects permits to generalize to an arbitrary number of contact points that can be different in the human and robotic hands, as well as to remove the constraints on the position of contact points. The forward mapping is based on the definition of a series of reference points, both on the human and the robotic hand (see Fig. 2a). The reference points on the human hand are necessary to evaluate the transformation produced by the hand motion and they are the points where the force feedback is rendered. These points are referred to as interaction points. The contact points on the robotic hand are necessary to define the virtual object on the slave side. A configuration variation on the human hand causes a transformation of the position of the interaction points, which can be generally represented by a six-dimensional displacement and/or a non rigid deformation. In this paper, we assume that this transformation can be represented as a linear transformation, estimated from the displacement of the reference points. The same linear transformation is then imposed to the robotic hand reference points and the hand joint displacement is consequently defined by solving its inverse kinematics. A linear transformation matrix can be decomposed to separately reproduce the contribution in terms of internal forces [23], which are paramount for grasp control, and in terms of the rigid body motion imposed by the hand on the manipulated object [24]. In the following, we will briefly report the main procedure equations. Let {W m } be an inertial reference frame attached to the master sub-system. Similarly, consider {W s } an inertial reference frame, adopted to describe the slave motion. Let the vector p m j,c R3 represent the coordinates of the j-th interaction point, expressed in {W m }, when the master is in a given configuration C m, with j = 1,,n m, where n m is the number of interaction points on the master. Let us define a vector p m c R 3nm as the collections of the coordinates of all these points. A set of n s contact points can be defined on the slave: when the slave is in a certain configuration C s, their coordinates, expressed in {W s }, are indicated with p s l,c, with l = 1,,ns and are collected in a vector p s c R 3ns. Note that, in general, n m n s, and n m and n s are not a priori related. Let us assume that the position of the reference points over time can be tracked. In the following, we will denote by â R 4 the augmented representation of a generic vector a, adopted to write affine transformations, i.e., â = [a T 1] T. The mapping procedure proposed to evaluate the reference displacements for the slave system on the basis of the master ones is based on the assumption that the configuration variation of the
3

4

5 Fig. 4: Slave subsystem. A DLR-HIT Hand II is the endeffector of a 6 DoFs robotic arm, the KUKA KR3 robot. over the finger nail and a mobile platform able to apply the requested stimuli to the fingertip s volar surface. Three springs, placed between the mobile platform and the static part, keep the platform horizontally aligned with the rest of the device. Three servo-motors control the length of the three wires connecting the mobile platform vertices to the static platform, allowing to apply the requested force at the user s fingertip. The device structure, design and control are described in [29]. The actuators used for the device prototype are three HS-5035HD Digital Ultra Nano servos. The mechanical supports for the actuators and the mobile platform are made using acrylonitrile butadiene styrene, called ABSPlusTM (Stratasys Inc., USA). The total weight of the whole device, including actuators, springs, wires, and the mechanical support is about 40g. The force applied by the device to the user s finger pad is balanced by a force supported by the structure of the device on the back of the finger. This structure has a larger contact surface with respect to the mobile platform so that the local pressure is much lower and the contact is mainly perceived on the finger pad and not on the back side of the finger. Both devices are able to render cutaneous stimuli and most of the kinesthetic feedback is missing. A DLR-HIT Hand II mounted on a KUKA KR3 arm form the hand/arm system at the slave side. Only index and thumb fingers are actively used during the task to highlight the capability of the mapping framework to deal with different contact/interaction points at master and slave level. The peg position is computed with respect to the reference frame {W s }, placed on the wrist of the arm, as shown in Fig. 4. The system is managed by a GNU/Linux machine, equipped with a real-time scheduler. It communicates via UDP/IP with the controller of the robotic hand and via Eth.RSIXML with the telemanipulator. The cutaneous devices are PWM controlled with an Arduino Mega 2560 Board and are connected to the GNU/Linux machine via USB. B. Experimental results The task consists in picking a peg from a hole in a support base and place it in another one (see Fig. 4). The peg is a cylinder with diameter 3 cm and height 20 cm. The support base, whose height is 3.5 cm, has two holes of 4 cm in y [m] x [m] Fig. 5: Trajectories of the centroid of the two contact points on the slave projected on the z y plane. The color bar on the right shows elapsed time throughout the carried out task. error [m] x t [s] Fig. 6: Error between trajectories of the centroid of the three interaction points for the master and the trajectory of the centroid of the two contact points on the slave. diameter. Fig. 5 shows the trajectories of the centroid of the two contact points on the slave. Fig. 6 shows the error between trajectories of the centroid of the three interaction points for the master and the trajectory of the centroid of the two contact points on the slave. The plot of the error shows that during the task the error in terms of position is less than 4 mm. Fig. 7 shows the magnitude of the internal forces acting on the slave side and rendered on the master side during the peg in hole task. The total amount of forces is measured through the torque sensors placed at the robotic fingers joints. Internal forces at the slave side increase when the contact with the peg is achieved. When inserting the peg inside the second hole, the user tends to squeeze more the object in order to be more precise and avoid the loss of grasp due to undesired contacts with the punctured board. A video showing an experiment can be downloaded from IV. CONCLUSION In this paper, we presented a telemanipulation framework where the master system consisted of three wearable cutaneous device plus a Leap Motion for the human hand tracking. The force feedback has been computed by imposing the same wrench, estimated on the real grasped object, on a virtual object defined on the master side. This approach Elapsed time [s]
6 force [N] t [s] Fig. 7: Magnitude of the internal forces acting at the slave side and rendered at the master side during the peg in hole task. focuses on the effects of the manipulation on the grasped object, real for the slave and virtual for the master, and permits to abstract from the device kinematics and explicitly take into account the case of multiple contacts with the objects. The system has been evaluated on an experimental setup with three interaction points for the master and two contact points with the real object on the slave side. Although the thimbles resulted highly wearable and allowed to increase the master workspace, there are still some issues in the hand tracking. In fact, during experiments we faced some problems due to the Leap Motion tracking system. We are currently working on further reducing the size of the haptic devices. We are also testing the setup with a higher number of subjects to further evaluate the ease of use of the system and the improvement offered by the haptic feedback. As future work, we are planning to extend the framework to robots cooperatively grasping an object. We are also testing different models of robotic hands at the slave side, with particular emphasis on non anthropomorphic structures. REFERENCES [1] P. F. Hokayem and M. W. Spong, Bilateral teleoperation: An historical survey, Automatica, vol. 42, no. 12, pp , [2] C. Melchiorri, Robotic telemanipulation systems: an overview on control aspects, in Proc. 7th IFAC Symp. on Robot Control, 2003, pp [3] P. Arcara and C. Melchiorri, Control schemes for teleoperation with time delay: A comparative study, Robotics and Autonomous Systems, vol. 38, no. 1, pp , [4] K. Hashtrudi-Zaad and S. E. Salcudean, Analysis of control architectures for teleoperation systems with impedance/admittance master and slave manipulators, The International Journal of Robotics Research, vol. 20, no. 6, pp , [5] R. Cortesão, J. Park, and O. Khatib, Real-time adaptive control for haptic telemanipulation with kalman active observers, IEEE Transactions on Robotics, vol. 22, no. 5, pp , [6] M. Franken, S. Stramigioli, S. Misra, C. Secchi, and A. Macchelli, Bilateral telemanipulation with time delays: A two-layer approach combining passivity and transparency, IEEE Transactions on Robotics, vol. 27, no. 4, pp , [7] F. Barbagli, K. Salisbury, and D. Prattichizzo, Dynamic local models for stable multi-contact haptic interaction with deformable objects, in Proc. IEEE Int. Symp. in Haptic Interfaces for Virtual Environment and Teleoperator Systems, 2003, pp [8] N. Y. Lii, Z. Chen, M. A. Roa, A. Maier, B. Pleintinger, and C. Borst, Toward a task space framework for gesture commanded telemanipulation, in Proc. IEEE Int. Symp. in Robot and Human Interactive Communication, 2012, pp [9] I. Oikonomidis, N. Kyriazis, and A. A. Argyros, Efficient modelbased 3d tracking of hand articulations using kinect. in Proc. British Machine Vision Conference, vol. 1, no. 2, 2011, p. 3. [10] Q. Z. Ang, B. Horan, and S. Nahavandi, Multipoint haptic mediator interface for robotic teleoperation, IEEE Systems Journal, no. 99, pp. 1 12, [11] A. Kron and G. Schmidt, Multi-fingered tactile feedback from virtual and remote environments, in Proc. IEEE Int. Symp. in Haptic Interfaces for Virtual Environment and Teleoperator Systems, 2003, pp [12] D. Prattichizzo, F. Chinello, C. Pacchierotti, and M. Malvezzi, Towards wearability in fingertip haptics: a 3-dof wearable device for cutaneous force feedback, IEEE Transactions on Haptics, vol. 6, no. 4, pp , [13] L. Meli, S. Scheggi, C. Pacchierotti, and D. Prattichizzo, Wearable haptics and hand tracking via an rgb-d camera for immersive tactile experiences, in Proc. ACM Int. Conf. on Computer graphics and interactive techniques, [14] A. Frisoli, M. Solazzi, F. Salsedo, and M. Bergamasco, A fingertip haptic display for improving curvature discrimination, Presence: Teleoperators and Virtual Environments, vol. 17, no. 6, pp , [15] D. Prattichizzo, C. Pacchierotti, and G. Rosati, Cutaneous force feedback as a sensory subtraction technique in haptics, IEEE Transactions on Haptics, [16] M. J. Massimino and T. B. Sheridan, Sensory substitution for force feedback in teleoperation, Presence: Teleoperators and Virtual Environments, vol. 2, no. 4, pp , [17] M. Kitagawa, D. Dokko, A. M. Okamura, and D. D. Yuh, Effect of sensory substitution on suture-manipulation forces for robotic surgical systems, The Journal of thoracic and cardiovascular surgery, vol. 129, no. 1, pp , [18] G. Gioioso, A. Franchi, G. Salvietti, S. Scheggi, and D. Prattichizzo, The flying hand: A formation of uavs for cooperative aerial telemanipulation, in Proc. IEEE Int. Conf. on Robotics and Automation, 2014, pp [19] G. Gioioso, G. Salvietti, M. Malvezzi, and D. Prattichizzo, Mapping synergies from human to robotic hands with dissimilar kinematics: an approach in the object domain, IEEE Trans. on Robotics, vol. 29, no. 4, pp , August [20] G. Salvietti, L. Meli, G. Gioioso, M. Malvezzi, and D. Prattichizzo, Object-based bilateral telemanipulation between dissimilar kinematic structures, in Proc. IEEE/RSJ Int. Conf. Intelligent Robots and Systems, 2013, pp [21] W. B. Griffin, R. P. Findley, M. L. Turner, and M. R. Cutkosky, Calibration and mapping of a human hand for dexterous telemanipulation, in ASME IMECE 2000 Symposium on Haptic Interfaces for Virtual Environments and Teleoperator Systems, 2000, pp [22] G. Gioioso, G. Salvietti, M. Malvezzi, and D. Prattichizzo, An objectbased approach to map human hand synergies onto robotic hands with dissimilar kinematics, in Robotics: Science and Systems VIII. The MIT Press, [23] A. Bicchi, On the closure properties of robotic grasping, International Journal of Robotics Research, vol. 14, no. 4, pp , [24] D. Prattichizzo and J. Trinkle, Grasping, in Handbook on Robotics, B. Siciliano and O. Kathib, Eds. Springer, 2008, pp [25] R. W. Ogden, Non-linear elastic deformations. Courier Corporation, [26] G. Salvietti, M. Malvezzi, G. Gioioso, and D. Prattichizzo, On the use of homogeneous transformations to map human hand movements onto robotic hands, in Proc. IEEE Int. Conf. on Robotics and Automation, [27] D. Prattichizzo, M. Malvezzi, M. Gabiccini, and A. Bicchi, On motion and force controllability of precision grasps with hands actuated by soft synergies, IEEE Transactions on Robotics, vol. 29, no. 6, pp , [28] F. Weichert, D. Bachmann, B. Rudak, and D. Fisseler, Analysis of the accuracy and robustness of the leap motion controller, Sensors, vol. 13, no. 5, pp , [29] C. Pacchierotti, F. Chinello, M. Malvezzi, L. Meli, and D. Prattichizzo, Two finger grasping simulation with cutaneous and kinesthetic force feedback, in Haptics: Perception, Devices, Mobility, and Communication, ser. Lecture Notes in Computer Science, P. Isokoski and J. Springare, Eds. Springer, 2012, vol. 7282, pp
Cutaneous haptic feedback to ensure the stability of robotic teleoperation systems
 1 Cutaneous haptic feedback to ensure the stability of robotic teleoperation systems C. Pacchierotti, L. Meli, F. Chinello, M. Malvezzi, and D. Prattichizzo Abstract Cutaneous haptic feedback can be used
1 Cutaneous haptic feedback to ensure the stability of robotic teleoperation systems C. Pacchierotti, L. Meli, F. Chinello, M. Malvezzi, and D. Prattichizzo Abstract Cutaneous haptic feedback can be used
The hring: a Wearable Haptic Device to Avoid Occlusions in Hand Tracking
 The hring: a Wearable Haptic Device to Avoid Occlusions in Hand Tracking Claudio Pacchierotti 1, Gionata Salvietti 2, Irfan Hussain 2, Leonardo Meli 1,2 and Domenico Prattichizzo 1,2 Abstract The wearable
The hring: a Wearable Haptic Device to Avoid Occlusions in Hand Tracking Claudio Pacchierotti 1, Gionata Salvietti 2, Irfan Hussain 2, Leonardo Meli 1,2 and Domenico Prattichizzo 1,2 Abstract The wearable
What if my Hand had Flying Fingers?
 What if my Hand had Flying Fingers? Antonio Franchi, -, Université de Toulouse, Toulouse, France Workshop on Human Multi-Robot System Interaction 2017 IEEE ICRA, Singapore, May 31st, 2017 Collaborative
What if my Hand had Flying Fingers? Antonio Franchi, -, Université de Toulouse, Toulouse, France Workshop on Human Multi-Robot System Interaction 2017 IEEE ICRA, Singapore, May 31st, 2017 Collaborative
Cutaneous Feedback of Fingertip Deformation and Vibration for Palpation in Robotic Surgery
 Cutaneous Feedback of Fingertip Deformation and Vibration for Palpation in Robotic Surgery Claudio Pacchierotti Domenico Prattichizzo Katherine J. Kuchenbecker Motivation Despite its expected clinical
Cutaneous Feedback of Fingertip Deformation and Vibration for Palpation in Robotic Surgery Claudio Pacchierotti Domenico Prattichizzo Katherine J. Kuchenbecker Motivation Despite its expected clinical
Chapter 2 Introduction to Haptics 2.1 Definition of Haptics
 Chapter 2 Introduction to Haptics 2.1 Definition of Haptics The word haptic originates from the Greek verb hapto to touch and therefore refers to the ability to touch and manipulate objects. The haptic
Chapter 2 Introduction to Haptics 2.1 Definition of Haptics The word haptic originates from the Greek verb hapto to touch and therefore refers to the ability to touch and manipulate objects. The haptic
Control design issues for a microinvasive neurosurgery teleoperator system
 Control design issues for a microinvasive neurosurgery teleoperator system Jacopo Semmoloni, Rudy Manganelli, Alessandro Formaglio and Domenico Prattichizzo Abstract This paper deals with controller design
Control design issues for a microinvasive neurosurgery teleoperator system Jacopo Semmoloni, Rudy Manganelli, Alessandro Formaglio and Domenico Prattichizzo Abstract This paper deals with controller design
Robust Haptic Teleoperation of a Mobile Manipulation Platform
 Robust Haptic Teleoperation of a Mobile Manipulation Platform Jaeheung Park and Oussama Khatib Stanford AI Laboratory Stanford University http://robotics.stanford.edu Abstract. This paper presents a new
Robust Haptic Teleoperation of a Mobile Manipulation Platform Jaeheung Park and Oussama Khatib Stanford AI Laboratory Stanford University http://robotics.stanford.edu Abstract. This paper presents a new
Haptic Virtual Fixtures for Robot-Assisted Manipulation
 Haptic Virtual Fixtures for Robot-Assisted Manipulation Jake J. Abbott, Panadda Marayong, and Allison M. Okamura Department of Mechanical Engineering, The Johns Hopkins University {jake.abbott, pmarayong,
Haptic Virtual Fixtures for Robot-Assisted Manipulation Jake J. Abbott, Panadda Marayong, and Allison M. Okamura Department of Mechanical Engineering, The Johns Hopkins University {jake.abbott, pmarayong,
TELEOPERATED robot-assisted surgical systems can
 Sensory subtraction in robot-assisted surgery: fingertip skin deformation feedback to ensure safety and improve transparency in bimanual haptic interaction Leonardo Meli, Student Member, IEEE, Claudio
Sensory subtraction in robot-assisted surgery: fingertip skin deformation feedback to ensure safety and improve transparency in bimanual haptic interaction Leonardo Meli, Student Member, IEEE, Claudio
Lecture 9: Teleoperation
 ME 327: Design and Control of Haptic Systems Autumn 2018 Lecture 9: Teleoperation Allison M. Okamura Stanford University teleoperation history and examples the genesis of teleoperation? a Polygraph is
ME 327: Design and Control of Haptic Systems Autumn 2018 Lecture 9: Teleoperation Allison M. Okamura Stanford University teleoperation history and examples the genesis of teleoperation? a Polygraph is
Design and Control of the BUAA Four-Fingered Hand
 Proceedings of the 2001 IEEE International Conference on Robotics & Automation Seoul, Korea May 21-26, 2001 Design and Control of the BUAA Four-Fingered Hand Y. Zhang, Z. Han, H. Zhang, X. Shang, T. Wang,
Proceedings of the 2001 IEEE International Conference on Robotics & Automation Seoul, Korea May 21-26, 2001 Design and Control of the BUAA Four-Fingered Hand Y. Zhang, Z. Han, H. Zhang, X. Shang, T. Wang,
Performance Issues in Collaborative Haptic Training
 27 IEEE International Conference on Robotics and Automation Roma, Italy, 1-14 April 27 FrA4.4 Performance Issues in Collaborative Haptic Training Behzad Khademian and Keyvan Hashtrudi-Zaad Abstract This
27 IEEE International Conference on Robotics and Automation Roma, Italy, 1-14 April 27 FrA4.4 Performance Issues in Collaborative Haptic Training Behzad Khademian and Keyvan Hashtrudi-Zaad Abstract This
Using Simulation to Design Control Strategies for Robotic No-Scar Surgery
 Using Simulation to Design Control Strategies for Robotic No-Scar Surgery Antonio DE DONNO 1, Florent NAGEOTTE, Philippe ZANNE, Laurent GOFFIN and Michel de MATHELIN LSIIT, University of Strasbourg/CNRS,
Using Simulation to Design Control Strategies for Robotic No-Scar Surgery Antonio DE DONNO 1, Florent NAGEOTTE, Philippe ZANNE, Laurent GOFFIN and Michel de MATHELIN LSIIT, University of Strasbourg/CNRS,
Steady-Hand Teleoperation with Virtual Fixtures
 Steady-Hand Teleoperation with Virtual Fixtures Jake J. Abbott 1, Gregory D. Hager 2, and Allison M. Okamura 1 1 Department of Mechanical Engineering 2 Department of Computer Science The Johns Hopkins
Steady-Hand Teleoperation with Virtual Fixtures Jake J. Abbott 1, Gregory D. Hager 2, and Allison M. Okamura 1 1 Department of Mechanical Engineering 2 Department of Computer Science The Johns Hopkins
Modeling and Experimental Studies of a Novel 6DOF Haptic Device
 Proceedings of The Canadian Society for Mechanical Engineering Forum 2010 CSME FORUM 2010 June 7-9, 2010, Victoria, British Columbia, Canada Modeling and Experimental Studies of a Novel DOF Haptic Device
Proceedings of The Canadian Society for Mechanical Engineering Forum 2010 CSME FORUM 2010 June 7-9, 2010, Victoria, British Columbia, Canada Modeling and Experimental Studies of a Novel DOF Haptic Device
2. Introduction to Computer Haptics
 2. Introduction to Computer Haptics Seungmoon Choi, Ph.D. Assistant Professor Dept. of Computer Science and Engineering POSTECH Outline Basics of Force-Feedback Haptic Interfaces Introduction to Computer
2. Introduction to Computer Haptics Seungmoon Choi, Ph.D. Assistant Professor Dept. of Computer Science and Engineering POSTECH Outline Basics of Force-Feedback Haptic Interfaces Introduction to Computer
Cutaneous Force Feedback as a Sensory Subtraction Technique in Haptics
 IEEE TRANSACTIONS ON HAPTICS, VOL. 5, NO. 4, OCTOBER-DECEMBER 2012 289 Cutaneous Force Feedback as a Sensory Subtraction Technique in Haptics Domenico Prattichizzo, Member, IEEE, Claudio Pacchierotti,
IEEE TRANSACTIONS ON HAPTICS, VOL. 5, NO. 4, OCTOBER-DECEMBER 2012 289 Cutaneous Force Feedback as a Sensory Subtraction Technique in Haptics Domenico Prattichizzo, Member, IEEE, Claudio Pacchierotti,
Haptic Tele-Assembly over the Internet
 Haptic Tele-Assembly over the Internet Sandra Hirche, Bartlomiej Stanczyk, and Martin Buss Institute of Automatic Control Engineering, Technische Universität München D-829 München, Germany, http : //www.lsr.ei.tum.de
Haptic Tele-Assembly over the Internet Sandra Hirche, Bartlomiej Stanczyk, and Martin Buss Institute of Automatic Control Engineering, Technische Universität München D-829 München, Germany, http : //www.lsr.ei.tum.de
World Automation Congress
 ISORA028 Main Menu World Automation Congress Tenth International Symposium on Robotics with Applications Seville, Spain June 28th-July 1st, 2004 Design And Experiences With DLR Hand II J. Butterfaß, M.
ISORA028 Main Menu World Automation Congress Tenth International Symposium on Robotics with Applications Seville, Spain June 28th-July 1st, 2004 Design And Experiences With DLR Hand II J. Butterfaß, M.
Toward a Task Space Framework for Gesture Commanded Telemanipulation
 212 IEEE RO-MAN: The 21st IEEE International Symposium on Robot and Human Interactive Communication. September 9-13, 212. Paris, France. Toward a Task Space Framework for Gesture Commanded Telemanipulation
212 IEEE RO-MAN: The 21st IEEE International Symposium on Robot and Human Interactive Communication. September 9-13, 212. Paris, France. Toward a Task Space Framework for Gesture Commanded Telemanipulation
DETC AN ADMITTANCE GLOVE MECHANISM FOR CONTROLLING A MOBILE ROBOT
 Proceedings of the ASME 212 International Design Engineering Technical Conferences & Computers and Information in Engineering Conference IDETC/CIE 212 August 12-15, 212, Chicago, IL, USA DETC212-71284
Proceedings of the ASME 212 International Design Engineering Technical Conferences & Computers and Information in Engineering Conference IDETC/CIE 212 August 12-15, 212, Chicago, IL, USA DETC212-71284
The Haptic Impendance Control through Virtual Environment Force Compensation
 The Haptic Impendance Control through Virtual Environment Force Compensation OCTAVIAN MELINTE Robotics and Mechatronics Department Institute of Solid Mechanicsof the Romanian Academy ROMANIA octavian.melinte@yahoo.com
The Haptic Impendance Control through Virtual Environment Force Compensation OCTAVIAN MELINTE Robotics and Mechatronics Department Institute of Solid Mechanicsof the Romanian Academy ROMANIA octavian.melinte@yahoo.com
Proprioception & force sensing
 Proprioception & force sensing Roope Raisamo Tampere Unit for Computer-Human Interaction (TAUCHI) School of Information Sciences University of Tampere, Finland Based on material by Jussi Rantala, Jukka
Proprioception & force sensing Roope Raisamo Tampere Unit for Computer-Human Interaction (TAUCHI) School of Information Sciences University of Tampere, Finland Based on material by Jussi Rantala, Jukka
IOSR Journal of Engineering (IOSRJEN) e-issn: , p-issn: , Volume 2, Issue 11 (November 2012), PP 37-43
 e-issn: , p-issn: , Volume 2, Issue 11 (November 2012), PP 37-43") IOSR Journal of Engineering (IOSRJEN) e-issn: 2250-3021, p-issn: 2278-8719, Volume 2, Issue 11 (November 2012), PP 37-43 Operative Precept of robotic arm expending Haptic Virtual System Arnab Das 1, Swagat
IOSR Journal of Engineering (IOSRJEN) e-issn: 2250-3021, p-issn: 2278-8719, Volume 2, Issue 11 (November 2012), PP 37-43 Operative Precept of robotic arm expending Haptic Virtual System Arnab Das 1, Swagat
MEAM 520. Haptic Rendering and Teleoperation
 MEAM 520 Haptic Rendering and Teleoperation Katherine J. Kuchenbecker, Ph.D. General Robotics, Automation, Sensing, and Perception Lab (GRASP) MEAM Department, SEAS, University of Pennsylvania Lecture
MEAM 520 Haptic Rendering and Teleoperation Katherine J. Kuchenbecker, Ph.D. General Robotics, Automation, Sensing, and Perception Lab (GRASP) MEAM Department, SEAS, University of Pennsylvania Lecture
Booklet of teaching units
 International Master Program in Mechatronic Systems for Rehabilitation Booklet of teaching units Third semester (M2 S1) Master Sciences de l Ingénieur Université Pierre et Marie Curie Paris 6 Boite 164,
International Master Program in Mechatronic Systems for Rehabilitation Booklet of teaching units Third semester (M2 S1) Master Sciences de l Ingénieur Université Pierre et Marie Curie Paris 6 Boite 164,
Masatoshi Ishikawa, Akio Namiki, Takashi Komuro, and Idaku Ishii
 1ms Sensory-Motor Fusion System with Hierarchical Parallel Processing Architecture Masatoshi Ishikawa, Akio Namiki, Takashi Komuro, and Idaku Ishii Department of Mathematical Engineering and Information
1ms Sensory-Motor Fusion System with Hierarchical Parallel Processing Architecture Masatoshi Ishikawa, Akio Namiki, Takashi Komuro, and Idaku Ishii Department of Mathematical Engineering and Information
Authors,Title,Year,Source title,volume,issue,art. No.,Page start,page end,page count,cited by,doi,link
 Authors,Title,Year,Source title,volume,issue,art. No.,Page start,page end,page count,cited by,doi,link Pacchierotti, C., Ongaro, F., van den Brink, F., Yoon, C., Prattichizzo, D., Gracias, D.H., Misra,
Authors,Title,Year,Source title,volume,issue,art. No.,Page start,page end,page count,cited by,doi,link Pacchierotti, C., Ongaro, F., van den Brink, F., Yoon, C., Prattichizzo, D., Gracias, D.H., Misra,
Motion Control of a Semi-Mobile Haptic Interface for Extended Range Telepresence
 Motion Control of a Semi-Mobile Haptic Interface for Extended Range Telepresence Antonia Pérez Arias and Uwe D. Hanebeck Abstract This paper presents the control concept of a semimobile haptic interface
Motion Control of a Semi-Mobile Haptic Interface for Extended Range Telepresence Antonia Pérez Arias and Uwe D. Hanebeck Abstract This paper presents the control concept of a semimobile haptic interface
Tele-operation of a Robot Arm with Electro Tactile Feedback
 F Tele-operation of a Robot Arm with Electro Tactile Feedback Daniel S. Pamungkas and Koren Ward * Abstract Tactile feedback from a remotely controlled robotic arm can facilitate certain tasks by enabling
F Tele-operation of a Robot Arm with Electro Tactile Feedback Daniel S. Pamungkas and Koren Ward * Abstract Tactile feedback from a remotely controlled robotic arm can facilitate certain tasks by enabling
MEAM 520. Haptic Rendering and Teleoperation
 MEAM 520 Haptic Rendering and Teleoperation Katherine J. Kuchenbecker, Ph.D. General Robotics, Automation, Sensing, and Perception Lab (GRASP) MEAM Department, SEAS, University of Pennsylvania Lecture
MEAM 520 Haptic Rendering and Teleoperation Katherine J. Kuchenbecker, Ph.D. General Robotics, Automation, Sensing, and Perception Lab (GRASP) MEAM Department, SEAS, University of Pennsylvania Lecture
Fuzzy Logic Based Force-Feedback for Obstacle Collision Avoidance of Robot Manipulators
 Fuzzy Logic Based Force-Feedback for Obstacle Collision Avoidance of Robot Manipulators D. Wijayasekara, M. Manic Department of Computer Science University of Idaho Idaho Falls, USA wija2589@vandals.uidaho.edu,
Fuzzy Logic Based Force-Feedback for Obstacle Collision Avoidance of Robot Manipulators D. Wijayasekara, M. Manic Department of Computer Science University of Idaho Idaho Falls, USA wija2589@vandals.uidaho.edu,
Feedback Strategies for Shared Control in Dexterous Telemanipulation
 Feedback Strategies for Shared Control in Dexterous Telemanipulation Weston B. Griffin, William R. Provancher, and Mark R. Cutkosky Dexterous Manipulation Laboratory Stanford University Bldg. 56, 44 Panama
Feedback Strategies for Shared Control in Dexterous Telemanipulation Weston B. Griffin, William R. Provancher, and Mark R. Cutkosky Dexterous Manipulation Laboratory Stanford University Bldg. 56, 44 Panama
Grasp Mapping Between a 3-Finger Haptic Device and a Robotic Hand
 Grasp Mapping Between a 3-Finger Haptic Device and a Robotic Hand Francisco Suárez-Ruiz 1, Ignacio Galiana 1, Yaroslav Tenzer 2,3, Leif P. Jentoft 2,3, Robert D. Howe 2, and Manuel Ferre 1 1 Centre for
Grasp Mapping Between a 3-Finger Haptic Device and a Robotic Hand Francisco Suárez-Ruiz 1, Ignacio Galiana 1, Yaroslav Tenzer 2,3, Leif P. Jentoft 2,3, Robert D. Howe 2, and Manuel Ferre 1 1 Centre for
Tele-operation of a robot arm with electro tactile feedback
 University of Wollongong Research Online Faculty of Engineering and Information Sciences - Papers: Part A Faculty of Engineering and Information Sciences 2013 Tele-operation of a robot arm with electro
University of Wollongong Research Online Faculty of Engineering and Information Sciences - Papers: Part A Faculty of Engineering and Information Sciences 2013 Tele-operation of a robot arm with electro
Mobile Manipulation in der Telerobotik
 Mobile Manipulation in der Telerobotik Angelika Peer, Thomas Schauß, Ulrich Unterhinninghofen, Martin Buss angelika.peer@tum.de schauss@tum.de ulrich.unterhinninghofen@tum.de mb@tum.de Lehrstuhl für Steuerungs-
Mobile Manipulation in der Telerobotik Angelika Peer, Thomas Schauß, Ulrich Unterhinninghofen, Martin Buss angelika.peer@tum.de schauss@tum.de ulrich.unterhinninghofen@tum.de mb@tum.de Lehrstuhl für Steuerungs-
Development and Testing of a Telemanipulation System with Arm and Hand Motion
 Development and Testing of a Telemanipulation System with Arm and Hand Motion Michael L. Turner, Ryan P. Findley, Weston B. Griffin, Mark R. Cutkosky and Daniel H. Gomez Dexterous Manipulation Laboratory
Development and Testing of a Telemanipulation System with Arm and Hand Motion Michael L. Turner, Ryan P. Findley, Weston B. Griffin, Mark R. Cutkosky and Daniel H. Gomez Dexterous Manipulation Laboratory
AHAPTIC interface is a kinesthetic link between a human
 IEEE TRANSACTIONS ON CONTROL SYSTEMS TECHNOLOGY, VOL. 13, NO. 5, SEPTEMBER 2005 737 Time Domain Passivity Control With Reference Energy Following Jee-Hwan Ryu, Carsten Preusche, Blake Hannaford, and Gerd
IEEE TRANSACTIONS ON CONTROL SYSTEMS TECHNOLOGY, VOL. 13, NO. 5, SEPTEMBER 2005 737 Time Domain Passivity Control With Reference Energy Following Jee-Hwan Ryu, Carsten Preusche, Blake Hannaford, and Gerd
PROPRIOCEPTION AND FORCE FEEDBACK
 PROPRIOCEPTION AND FORCE FEEDBACK Roope Raisamo and Jukka Raisamo Multimodal Interaction Research Group Tampere Unit for Computer Human Interaction Department of Computer Sciences University of Tampere,
PROPRIOCEPTION AND FORCE FEEDBACK Roope Raisamo and Jukka Raisamo Multimodal Interaction Research Group Tampere Unit for Computer Human Interaction Department of Computer Sciences University of Tampere,
A cutaneous stretch device for forearm rotational guidace
 Chapter A cutaneous stretch device for forearm rotational guidace Within the project, physical exercises and rehabilitative activities are paramount aspects for the resulting assistive living environment.
Chapter A cutaneous stretch device for forearm rotational guidace Within the project, physical exercises and rehabilitative activities are paramount aspects for the resulting assistive living environment.
HAPTIC rendering stands for the process by which desired
 IEEE TRANS. ON HAPTICS, VOL. XXXX, NO. XXXX, XXXX 1 Optimization-Based Wearable Tactile Rendering Alvaro G. Perez Daniel Lobo Francesco Chinello Gabriel Cirio Monica Malvezzi José San Martín Domenico Prattichizzo
IEEE TRANS. ON HAPTICS, VOL. XXXX, NO. XXXX, XXXX 1 Optimization-Based Wearable Tactile Rendering Alvaro G. Perez Daniel Lobo Francesco Chinello Gabriel Cirio Monica Malvezzi José San Martín Domenico Prattichizzo
Shape Memory Alloy Actuator Controller Design for Tactile Displays
 34th IEEE Conference on Decision and Control New Orleans, Dec. 3-5, 995 Shape Memory Alloy Actuator Controller Design for Tactile Displays Robert D. Howe, Dimitrios A. Kontarinis, and William J. Peine
34th IEEE Conference on Decision and Control New Orleans, Dec. 3-5, 995 Shape Memory Alloy Actuator Controller Design for Tactile Displays Robert D. Howe, Dimitrios A. Kontarinis, and William J. Peine
Proxy-Based Haptic Rendering for Underactuated Haptic Devices
 Proxy-Based Haptic Rendering for Underactuated Haptic Devices Daniel Lobo1, Mine Sarac 2, Mickeal Verschoor1, Massimiliano Solazzi2, Antonio Frisoli2, Miguel A. Otaduy1 Abstract Standard haptic rendering
Proxy-Based Haptic Rendering for Underactuated Haptic Devices Daniel Lobo1, Mine Sarac 2, Mickeal Verschoor1, Massimiliano Solazzi2, Antonio Frisoli2, Miguel A. Otaduy1 Abstract Standard haptic rendering
EXPERIMENTAL BILATERAL CONTROL TELEMANIPULATION USING A VIRTUAL EXOSKELETON
 EXPERIMENTAL BILATERAL CONTROL TELEMANIPULATION USING A VIRTUAL EXOSKELETON Josep Amat 1, Alícia Casals 2, Manel Frigola 2, Enric Martín 2 1Robotics Institute. (IRI) UPC / CSIC Llorens Artigas 4-6, 2a
EXPERIMENTAL BILATERAL CONTROL TELEMANIPULATION USING A VIRTUAL EXOSKELETON Josep Amat 1, Alícia Casals 2, Manel Frigola 2, Enric Martín 2 1Robotics Institute. (IRI) UPC / CSIC Llorens Artigas 4-6, 2a
Chapter 1 Introduction
 Chapter 1 Introduction It is appropriate to begin the textbook on robotics with the definition of the industrial robot manipulator as given by the ISO 8373 standard. An industrial robot manipulator is
Chapter 1 Introduction It is appropriate to begin the textbook on robotics with the definition of the industrial robot manipulator as given by the ISO 8373 standard. An industrial robot manipulator is
Soft Finger Tactile Rendering for Wearable Haptics
 Soft Finger Tactile Rendering for Wearable Haptics Alvaro G. Perez1, Daniel Lobo1, Francesco Chinello2,3, Gabriel Cirio1, Monica Malvezzi2, Jos e San Mart ın1, Domenico Prattichizzo2,3 and Miguel A. Otaduy1
Soft Finger Tactile Rendering for Wearable Haptics Alvaro G. Perez1, Daniel Lobo1, Francesco Chinello2,3, Gabriel Cirio1, Monica Malvezzi2, Jos e San Mart ın1, Domenico Prattichizzo2,3 and Miguel A. Otaduy1
Applying Model Mediation Method to a Mobile Robot Bilateral Teleoperation System Experiencing Time Delays in Communication
 Applying Model Mediation Method to a Mobile Robot Bilateral Teleoperation System Experiencing Time Delays in Communication B. Taner * M. İ. C. Dede E. Uzunoğlu İzmir Institute of Technology İzmir Institute
Applying Model Mediation Method to a Mobile Robot Bilateral Teleoperation System Experiencing Time Delays in Communication B. Taner * M. İ. C. Dede E. Uzunoğlu İzmir Institute of Technology İzmir Institute
IEEE TRANSACTIONS ON BIOMEDICAL ENGINEERING,
 IEEE TRANSACTIONS ON BIOMEDICAL ENGINEERING, 215 1 Cutaneous Feedback of Fingertip Deformation and Vibration for Palpation in Robotic Surgery Claudio Pacchierotti, Domenico Prattichizzo, Senior Member,
IEEE TRANSACTIONS ON BIOMEDICAL ENGINEERING, 215 1 Cutaneous Feedback of Fingertip Deformation and Vibration for Palpation in Robotic Surgery Claudio Pacchierotti, Domenico Prattichizzo, Senior Member,
TOUCH sensations are essential for many telemanipulation
 IEEE TRANSACTIONS ON ROBOTICS, VOL 22, NO 5, OCTOBER 2006 987 Real-Time Adaptive Control for Haptic Telemanipulation With Kalman Active Observers Rui Cortesão, Member, IEEE, Jaeheung Park, Student Member,
IEEE TRANSACTIONS ON ROBOTICS, VOL 22, NO 5, OCTOBER 2006 987 Real-Time Adaptive Control for Haptic Telemanipulation With Kalman Active Observers Rui Cortesão, Member, IEEE, Jaeheung Park, Student Member,
ISMCR2004. Abstract. 2. The mechanism of the master-slave arm of Telesar II. 1. Introduction. D21-Page 1
 Development of Multi-D.O.F. Master-Slave Arm with Bilateral Impedance Control for Telexistence Riichiro Tadakuma, Kiyohiro Sogen, Hiroyuki Kajimoto, Naoki Kawakami, and Susumu Tachi 7-3-1 Hongo, Bunkyo-ku,
Development of Multi-D.O.F. Master-Slave Arm with Bilateral Impedance Control for Telexistence Riichiro Tadakuma, Kiyohiro Sogen, Hiroyuki Kajimoto, Naoki Kawakami, and Susumu Tachi 7-3-1 Hongo, Bunkyo-ku,
Guidelines for Haptic Interface Evaluation: Physical & Psychophysical Methods
 HS'12 Workshop on Hardware Evaluation Guidelines for Haptic Interface Evaluation: Physical & Psychophysical Methods Evren Samur, PhD March 4th, 2012 Prosthesis Design & Control Lab Center for Bionic Medicine
HS'12 Workshop on Hardware Evaluation Guidelines for Haptic Interface Evaluation: Physical & Psychophysical Methods Evren Samur, PhD March 4th, 2012 Prosthesis Design & Control Lab Center for Bionic Medicine
Computer Assisted Medical Interventions
 Outline Computer Assisted Medical Interventions Force control, collaborative manipulation and telemanipulation Bernard BAYLE Joint course University of Strasbourg, University of Houston, Telecom Paris
Outline Computer Assisted Medical Interventions Force control, collaborative manipulation and telemanipulation Bernard BAYLE Joint course University of Strasbourg, University of Houston, Telecom Paris
Touch Feedback in a Head-Mounted Display Virtual Reality through a Kinesthetic Haptic Device
 Touch Feedback in a Head-Mounted Display Virtual Reality through a Kinesthetic Haptic Device Andrew A. Stanley Stanford University Department of Mechanical Engineering astan@stanford.edu Alice X. Wu Stanford
Touch Feedback in a Head-Mounted Display Virtual Reality through a Kinesthetic Haptic Device Andrew A. Stanley Stanford University Department of Mechanical Engineering astan@stanford.edu Alice X. Wu Stanford
Nonlinear Adaptive Bilateral Control of Teleoperation Systems with Uncertain Dynamics and Kinematics
 Nonlinear Adaptive Bilateral Control of Teleoperation Systems with Uncertain Dynamics and Kinematics X. Liu, M. Tavakoli, and Q. Huang Abstract Research so far on adaptive bilateral control of master-slave
Nonlinear Adaptive Bilateral Control of Teleoperation Systems with Uncertain Dynamics and Kinematics X. Liu, M. Tavakoli, and Q. Huang Abstract Research so far on adaptive bilateral control of master-slave
Peter Berkelman. ACHI/DigitalWorld
 Magnetic Levitation Haptic Peter Berkelman ACHI/DigitalWorld February 25, 2013 Outline: Haptics - Force Feedback Sample devices: Phantoms, Novint Falcon, Force Dimension Inertia, friction, hysteresis/backlash
Magnetic Levitation Haptic Peter Berkelman ACHI/DigitalWorld February 25, 2013 Outline: Haptics - Force Feedback Sample devices: Phantoms, Novint Falcon, Force Dimension Inertia, friction, hysteresis/backlash
Available theses in industrial robotics (October 2016) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin
 Prof. Paolo Rocco Prof. Andrea Maria Zanchettin") Available theses in industrial robotics (October 2016) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Politecnico di Milano - Dipartimento di Elettronica, Informazione e Bioingegneria Industrial robotics
Available theses in industrial robotics (October 2016) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Politecnico di Milano - Dipartimento di Elettronica, Informazione e Bioingegneria Industrial robotics
MATLAB is a high-level programming language, extensively
 1 KUKA Sunrise Toolbox: Interfacing Collaborative Robots with MATLAB Mohammad Safeea and Pedro Neto Abstract Collaborative robots are increasingly present in our lives. The KUKA LBR iiwa equipped with
1 KUKA Sunrise Toolbox: Interfacing Collaborative Robots with MATLAB Mohammad Safeea and Pedro Neto Abstract Collaborative robots are increasingly present in our lives. The KUKA LBR iiwa equipped with
Five-fingered Robot Hand using Ultrasonic Motors and Elastic Elements *
 Proceedings of the 2005 IEEE International Conference on Robotics and Automation Barcelona, Spain, April 2005 Five-fingered Robot Hand using Ultrasonic Motors and Elastic Elements * Ikuo Yamano Department
Proceedings of the 2005 IEEE International Conference on Robotics and Automation Barcelona, Spain, April 2005 Five-fingered Robot Hand using Ultrasonic Motors and Elastic Elements * Ikuo Yamano Department
Development of a Finger Mounted Type Haptic Device Using a Plane Approximated to Tangent Plane
 Journal of Communication and Computer 13 (2016) 329-337 doi:10.17265/1548-7709/2016.07.002 D DAVID PUBLISHING Development of a Finger Mounted Type Haptic Device Using a Plane Approximated to Tangent Plane
Journal of Communication and Computer 13 (2016) 329-337 doi:10.17265/1548-7709/2016.07.002 D DAVID PUBLISHING Development of a Finger Mounted Type Haptic Device Using a Plane Approximated to Tangent Plane
Performance Analysis of Steady-Hand Teleoperation versus Cooperative Manipulation
 Performance Analysis of Steady-Hand Teleoperation versus Cooperative Manipulation Izukanne Emeagwali, Panadda Marayong, Jake J. Abbott, and Allison M. Okamura Engineering Research Center for Computer-Integrated
Performance Analysis of Steady-Hand Teleoperation versus Cooperative Manipulation Izukanne Emeagwali, Panadda Marayong, Jake J. Abbott, and Allison M. Okamura Engineering Research Center for Computer-Integrated
A Fingertip Haptic Display for Improving Curvature Discrimination
 A. Frisoli* M. Solazzi F. Salsedo M. Bergamasco PERCRO, Scuola Superiore Sant Anna Viale Rinaldo Piaggio Pisa, 56025 Italy A Fingertip Haptic Display for Improving Curvature Discrimination Abstract This
A. Frisoli* M. Solazzi F. Salsedo M. Bergamasco PERCRO, Scuola Superiore Sant Anna Viale Rinaldo Piaggio Pisa, 56025 Italy A Fingertip Haptic Display for Improving Curvature Discrimination Abstract This
Networked haptic cooperation using remote dynamic proxies
 29 Second International Conferences on Advances in Computer-Human Interactions Networked haptic cooperation using remote dynamic proxies Zhi Li Department of Mechanical Engineering University of Victoria
29 Second International Conferences on Advances in Computer-Human Interactions Networked haptic cooperation using remote dynamic proxies Zhi Li Department of Mechanical Engineering University of Victoria
A Feasibility Study of Time-Domain Passivity Approach for Bilateral Teleoperation of Mobile Manipulator
 International Conference on Control, Automation and Systems 2008 Oct. 14-17, 2008 in COEX, Seoul, Korea A Feasibility Study of Time-Domain Passivity Approach for Bilateral Teleoperation of Mobile Manipulator
International Conference on Control, Automation and Systems 2008 Oct. 14-17, 2008 in COEX, Seoul, Korea A Feasibility Study of Time-Domain Passivity Approach for Bilateral Teleoperation of Mobile Manipulator
Wearable Haptic Display to Present Gravity Sensation
 Wearable Haptic Display to Present Gravity Sensation Preliminary Observations and Device Design Kouta Minamizawa*, Hiroyuki Kajimoto, Naoki Kawakami*, Susumu, Tachi* (*) The University of Tokyo, Japan
Wearable Haptic Display to Present Gravity Sensation Preliminary Observations and Device Design Kouta Minamizawa*, Hiroyuki Kajimoto, Naoki Kawakami*, Susumu, Tachi* (*) The University of Tokyo, Japan
Information and Program
 Robotics 1 Information and Program Prof. Alessandro De Luca Robotics 1 1 Robotics 1 2017/18! First semester (12 weeks)! Monday, October 2, 2017 Monday, December 18, 2017! Courses of study (with this course
Robotics 1 Information and Program Prof. Alessandro De Luca Robotics 1 1 Robotics 1 2017/18! First semester (12 weeks)! Monday, October 2, 2017 Monday, December 18, 2017! Courses of study (with this course
Small Occupancy Robotic Mechanisms for Endoscopic Surgery
 Small Occupancy Robotic Mechanisms for Endoscopic Surgery Yuki Kobayashi, Shingo Chiyoda, Kouichi Watabe, Masafumi Okada, and Yoshihiko Nakamura Department of Mechano-Informatics, The University of Tokyo,
Small Occupancy Robotic Mechanisms for Endoscopic Surgery Yuki Kobayashi, Shingo Chiyoda, Kouichi Watabe, Masafumi Okada, and Yoshihiko Nakamura Department of Mechano-Informatics, The University of Tokyo,
CS277 - Experimental Haptics Lecture 2. Haptic Rendering
 CS277 - Experimental Haptics Lecture 2 Haptic Rendering Outline Announcements Human haptic perception Anatomy of a visual-haptic simulation Virtual wall and potential field rendering A note on timing...
CS277 - Experimental Haptics Lecture 2 Haptic Rendering Outline Announcements Human haptic perception Anatomy of a visual-haptic simulation Virtual wall and potential field rendering A note on timing...
Novel machine interface for scaled telesurgery
 Novel machine interface for scaled telesurgery S. Clanton, D. Wang, Y. Matsuoka, D. Shelton, G. Stetten SPIE Medical Imaging, vol. 5367, pp. 697-704. San Diego, Feb. 2004. A Novel Machine Interface for
Novel machine interface for scaled telesurgery S. Clanton, D. Wang, Y. Matsuoka, D. Shelton, G. Stetten SPIE Medical Imaging, vol. 5367, pp. 697-704. San Diego, Feb. 2004. A Novel Machine Interface for
Distributed Vision System: A Perceptual Information Infrastructure for Robot Navigation
 Distributed Vision System: A Perceptual Information Infrastructure for Robot Navigation Hiroshi Ishiguro Department of Information Science, Kyoto University Sakyo-ku, Kyoto 606-01, Japan E-mail: ishiguro@kuis.kyoto-u.ac.jp
Distributed Vision System: A Perceptual Information Infrastructure for Robot Navigation Hiroshi Ishiguro Department of Information Science, Kyoto University Sakyo-ku, Kyoto 606-01, Japan E-mail: ishiguro@kuis.kyoto-u.ac.jp
Discrimination of Virtual Haptic Textures Rendered with Different Update Rates
 Discrimination of Virtual Haptic Textures Rendered with Different Update Rates Seungmoon Choi and Hong Z. Tan Haptic Interface Research Laboratory Purdue University 465 Northwestern Avenue West Lafayette,
Discrimination of Virtual Haptic Textures Rendered with Different Update Rates Seungmoon Choi and Hong Z. Tan Haptic Interface Research Laboratory Purdue University 465 Northwestern Avenue West Lafayette,
Acquisition of Multi-Modal Expression of Slip through Pick-Up Experiences
 Acquisition of Multi-Modal Expression of Slip through Pick-Up Experiences Yasunori Tada* and Koh Hosoda** * Dept. of Adaptive Machine Systems, Osaka University ** Dept. of Adaptive Machine Systems, HANDAI
Acquisition of Multi-Modal Expression of Slip through Pick-Up Experiences Yasunori Tada* and Koh Hosoda** * Dept. of Adaptive Machine Systems, Osaka University ** Dept. of Adaptive Machine Systems, HANDAI
Robotics 2 Collision detection and robot reaction
 Robotics 2 Collision detection and robot reaction Prof. Alessandro De Luca Handling of robot collisions! safety in physical Human-Robot Interaction (phri)! robot dependability (i.e., beyond reliability)!
Robotics 2 Collision detection and robot reaction Prof. Alessandro De Luca Handling of robot collisions! safety in physical Human-Robot Interaction (phri)! robot dependability (i.e., beyond reliability)!
Robotic Capture and De-Orbit of a Tumbling and Heavy Target from Low Earth Orbit
 www.dlr.de Chart 1 Robotic Capture and De-Orbit of a Tumbling and Heavy Target from Low Earth Orbit Steffen Jaekel, R. Lampariello, G. Panin, M. Sagardia, B. Brunner, O. Porges, and E. Kraemer (1) M. Wieser,
www.dlr.de Chart 1 Robotic Capture and De-Orbit of a Tumbling and Heavy Target from Low Earth Orbit Steffen Jaekel, R. Lampariello, G. Panin, M. Sagardia, B. Brunner, O. Porges, and E. Kraemer (1) M. Wieser,
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute Use an example to explain what is admittance control? You may refer to exoskeleton
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute Use an example to explain what is admittance control? You may refer to exoskeleton
Haptic Rendering CPSC / Sonny Chan University of Calgary
 Haptic Rendering CPSC 599.86 / 601.86 Sonny Chan University of Calgary Today s Outline Announcements Human haptic perception Anatomy of a visual-haptic simulation Virtual wall and potential field rendering
Haptic Rendering CPSC 599.86 / 601.86 Sonny Chan University of Calgary Today s Outline Announcements Human haptic perception Anatomy of a visual-haptic simulation Virtual wall and potential field rendering
On Application of Virtual Fixtures as an Aid for Telemanipulation and Training
 On Application of Virtual Fixtures as an Aid for Telemanipulation and Training Shahram Payandeh and Zoran Stanisic Experimental Robotics Laboratory (ERL) School of Engineering Science Simon Fraser University
On Application of Virtual Fixtures as an Aid for Telemanipulation and Training Shahram Payandeh and Zoran Stanisic Experimental Robotics Laboratory (ERL) School of Engineering Science Simon Fraser University
PHYSICAL ROBOTS PROGRAMMING BY IMITATION USING VIRTUAL ROBOT PROTOTYPES
 Bulletin of the Transilvania University of Braşov Series I: Engineering Sciences Vol. 6 (55) No. 2-2013 PHYSICAL ROBOTS PROGRAMMING BY IMITATION USING VIRTUAL ROBOT PROTOTYPES A. FRATU 1 M. FRATU 2 Abstract:
Bulletin of the Transilvania University of Braşov Series I: Engineering Sciences Vol. 6 (55) No. 2-2013 PHYSICAL ROBOTS PROGRAMMING BY IMITATION USING VIRTUAL ROBOT PROTOTYPES A. FRATU 1 M. FRATU 2 Abstract:
HAPTIC GUIDANCE BASED ON HARMONIC FUNCTIONS FOR THE EXECUTION OF TELEOPERATED ASSEMBLY TASKS. Carlos Vázquez Jan Rosell,1
 Preprints of IAD' 2007: IFAC WORKSHOP ON INTELLIGENT ASSEMBLY AND DISASSEMBLY May 23-25 2007, Alicante, Spain HAPTIC GUIDANCE BASED ON HARMONIC FUNCTIONS FOR THE EXECUTION OF TELEOPERATED ASSEMBLY TASKS
Preprints of IAD' 2007: IFAC WORKSHOP ON INTELLIGENT ASSEMBLY AND DISASSEMBLY May 23-25 2007, Alicante, Spain HAPTIC GUIDANCE BASED ON HARMONIC FUNCTIONS FOR THE EXECUTION OF TELEOPERATED ASSEMBLY TASKS
The Tele-operation of the Humanoid Robot -Whole Body Operation for Humanoid Robots in Contact with Environment-
 The Tele-operation of the Humanoid Robot -Whole Body Operation for Humanoid Robots in Contact with Environment- Hitoshi Hasunuma, Kensuke Harada, and Hirohisa Hirukawa System Technology Development Center,
The Tele-operation of the Humanoid Robot -Whole Body Operation for Humanoid Robots in Contact with Environment- Hitoshi Hasunuma, Kensuke Harada, and Hirohisa Hirukawa System Technology Development Center,
Some Issues on Integrating Telepresence Technology into Industrial Robotic Assembly
 Some Issues on Integrating Telepresence Technology into Industrial Robotic Assembly Gunther Reinhart and Marwan Radi Abstract Since the 1940s, many promising telepresence research results have been obtained.
Some Issues on Integrating Telepresence Technology into Industrial Robotic Assembly Gunther Reinhart and Marwan Radi Abstract Since the 1940s, many promising telepresence research results have been obtained.
Wednesday, October 29, :00-04:00pm EB: 3546D. TELEOPERATION OF MOBILE MANIPULATORS By Yunyi Jia Advisor: Prof.
 Wednesday, October 29, 2014 02:00-04:00pm EB: 3546D TELEOPERATION OF MOBILE MANIPULATORS By Yunyi Jia Advisor: Prof. Ning Xi ABSTRACT Mobile manipulators provide larger working spaces and more flexibility
Wednesday, October 29, 2014 02:00-04:00pm EB: 3546D TELEOPERATION OF MOBILE MANIPULATORS By Yunyi Jia Advisor: Prof. Ning Xi ABSTRACT Mobile manipulators provide larger working spaces and more flexibility
Cognitive robots and emotional intelligence Cloud robotics Ethical, legal and social issues of robotic Construction robots Human activities in many
 Preface The jubilee 25th International Conference on Robotics in Alpe-Adria-Danube Region, RAAD 2016 was held in the conference centre of the Best Western Hotel M, Belgrade, Serbia, from 30 June to 2 July
Preface The jubilee 25th International Conference on Robotics in Alpe-Adria-Danube Region, RAAD 2016 was held in the conference centre of the Best Western Hotel M, Belgrade, Serbia, from 30 June to 2 July
Toward an Augmented Reality System for Violin Learning Support
 Toward an Augmented Reality System for Violin Learning Support Hiroyuki Shiino, François de Sorbier, and Hideo Saito Graduate School of Science and Technology, Keio University, Yokohama, Japan {shiino,fdesorbi,saito}@hvrl.ics.keio.ac.jp
Toward an Augmented Reality System for Violin Learning Support Hiroyuki Shiino, François de Sorbier, and Hideo Saito Graduate School of Science and Technology, Keio University, Yokohama, Japan {shiino,fdesorbi,saito}@hvrl.ics.keio.ac.jp
Whole-Hand Kinesthetic Feedback and Haptic Perception in Dextrous Virtual Manipulation
 100 IEEE TRANSACTIONS ON SYSTEMS, MAN, AND CYBERNETICS PART A: SYSTEMS AND HUMANS, VOL. 33, NO. 1, JANUARY 2003 Whole-Hand Kinesthetic Feedback and Haptic Perception in Dextrous Virtual Manipulation Costas
100 IEEE TRANSACTIONS ON SYSTEMS, MAN, AND CYBERNETICS PART A: SYSTEMS AND HUMANS, VOL. 33, NO. 1, JANUARY 2003 Whole-Hand Kinesthetic Feedback and Haptic Perception in Dextrous Virtual Manipulation Costas
Performance Analysis of a Haptic Telemanipulation Task under Time Delay
 Advanced Robotics 25 (2011) 651 673 brill.nl/ar Full paper Performance Analysis of a Haptic Telemanipulation Task under Time Delay Michael C. Yip a,, Mahdi Tavakoli b and Robert D. Howe c a Department
Advanced Robotics 25 (2011) 651 673 brill.nl/ar Full paper Performance Analysis of a Haptic Telemanipulation Task under Time Delay Michael C. Yip a,, Mahdi Tavakoli b and Robert D. Howe c a Department
Evaluation of Five-finger Haptic Communication with Network Delay
 Tactile Communication Haptic Communication Network Delay Evaluation of Five-finger Haptic Communication with Network Delay To realize tactile communication, we clarify some issues regarding how delay affects
Tactile Communication Haptic Communication Network Delay Evaluation of Five-finger Haptic Communication with Network Delay To realize tactile communication, we clarify some issues regarding how delay affects
Journal of Theoretical and Applied Mechanics, Sofia, 2014, vol. 44, No. 1, pp ROBONAUT 2: MISSION, TECHNOLOGIES, PERSPECTIVES
 Journal of Theoretical and Applied Mechanics, Sofia, 2014, vol. 44, No. 1, pp. 97 102 SCIENTIFIC LIFE DOI: 10.2478/jtam-2014-0006 ROBONAUT 2: MISSION, TECHNOLOGIES, PERSPECTIVES Galia V. Tzvetkova Institute
Journal of Theoretical and Applied Mechanics, Sofia, 2014, vol. 44, No. 1, pp. 97 102 SCIENTIFIC LIFE DOI: 10.2478/jtam-2014-0006 ROBONAUT 2: MISSION, TECHNOLOGIES, PERSPECTIVES Galia V. Tzvetkova Institute
Telecommunication and remote-controlled
 Spatial Interfaces Editors: Frank Steinicke and Wolfgang Stuerzlinger Telexistence: Enabling Humans to Be Virtually Ubiquitous Susumu Tachi The University of Tokyo Telecommunication and remote-controlled
Spatial Interfaces Editors: Frank Steinicke and Wolfgang Stuerzlinger Telexistence: Enabling Humans to Be Virtually Ubiquitous Susumu Tachi The University of Tokyo Telecommunication and remote-controlled
Computer Haptics and Applications
 Computer Haptics and Applications EURON Summer School 2003 Cagatay Basdogan, Ph.D. College of Engineering Koc University, Istanbul, 80910 (http://network.ku.edu.tr/~cbasdogan) Resources: EURON Summer School
Computer Haptics and Applications EURON Summer School 2003 Cagatay Basdogan, Ph.D. College of Engineering Koc University, Istanbul, 80910 (http://network.ku.edu.tr/~cbasdogan) Resources: EURON Summer School
Virtual Chromatic Percussions Simulated by Pseudo-Haptic and Vibrotactile Feedback
 Virtual Chromatic Percussions Simulated by Pseudo-Haptic and Vibrotactile Feedback Taku Hachisu The University of Electro- Communications 1-5-1 Chofugaoka, Chofu, Tokyo 182-8585, Japan +81 42 443 5363
Virtual Chromatic Percussions Simulated by Pseudo-Haptic and Vibrotactile Feedback Taku Hachisu The University of Electro- Communications 1-5-1 Chofugaoka, Chofu, Tokyo 182-8585, Japan +81 42 443 5363
Autonomous and Mobile Robotics Prof. Giuseppe Oriolo. Introduction: Applications, Problems, Architectures
 Autonomous and Mobile Robotics Prof. Giuseppe Oriolo Introduction: Applications, Problems, Architectures organization class schedule 2017/2018: 7 Mar - 1 June 2018, Wed 8:00-12:00, Fri 8:00-10:00, B2 6
Autonomous and Mobile Robotics Prof. Giuseppe Oriolo Introduction: Applications, Problems, Architectures organization class schedule 2017/2018: 7 Mar - 1 June 2018, Wed 8:00-12:00, Fri 8:00-10:00, B2 6
Haptics ME7960, Sect. 007 Lect. 6: Device Design I
 Haptics ME7960, Sect. 007 Lect. 6: Device Design I Spring 2009 Prof. William Provancher Prof. Jake Abbott University of Utah Salt Lake City, UT USA Today s Class Haptic Device Review (be sure to review
Haptics ME7960, Sect. 007 Lect. 6: Device Design I Spring 2009 Prof. William Provancher Prof. Jake Abbott University of Utah Salt Lake City, UT USA Today s Class Haptic Device Review (be sure to review
Chapter 1 Introduction to Robotics
 Chapter 1 Introduction to Robotics PS: Most of the pages of this presentation were obtained and adapted from various sources in the internet. 1 I. Definition of Robotics Definition (Robot Institute of
Chapter 1 Introduction to Robotics PS: Most of the pages of this presentation were obtained and adapted from various sources in the internet. 1 I. Definition of Robotics Definition (Robot Institute of
Effects of Longitudinal Skin Stretch on the Perception of Friction
 In the Proceedings of the 2 nd World Haptics Conference, to be held in Tsukuba, Japan March 22 24, 2007 Effects of Longitudinal Skin Stretch on the Perception of Friction Nicholas D. Sylvester William
In the Proceedings of the 2 nd World Haptics Conference, to be held in Tsukuba, Japan March 22 24, 2007 Effects of Longitudinal Skin Stretch on the Perception of Friction Nicholas D. Sylvester William
Benefits of using haptic devices in textile architecture
 28 September 2 October 2009, Universidad Politecnica de Valencia, Spain Alberto DOMINGO and Carlos LAZARO (eds.) Benefits of using haptic devices in textile architecture Javier SANCHEZ *, Joan SAVALL a
28 September 2 October 2009, Universidad Politecnica de Valencia, Spain Alberto DOMINGO and Carlos LAZARO (eds.) Benefits of using haptic devices in textile architecture Javier SANCHEZ *, Joan SAVALL a
Design of an Intermediate Layer to Enhance Operator Awareness and Safety in Telesurgical Systems
 212 IEEE/RSJ International Conference on Intelligent Robots and Systems October 7-12, 212. Vilamoura, Algarve, Portugal Design of an Intermediate Layer to Enhance Operator Awareness and Safety in Telesurgical
212 IEEE/RSJ International Conference on Intelligent Robots and Systems October 7-12, 212. Vilamoura, Algarve, Portugal Design of an Intermediate Layer to Enhance Operator Awareness and Safety in Telesurgical
Development of a Wearable Haptic Device That Presents Haptics Sensation of the Finger Pad to the Forearm*
 Development of a Wearable Haptic Device That Presents Haptics Sensation of the Finger Pad to the Forearm* Taha K. Moriyama, Ayaka Nishi, Rei Sakuragi, Takuto Nakamura, Hiroyuki Kajimoto Abstract While
Development of a Wearable Haptic Device That Presents Haptics Sensation of the Finger Pad to the Forearm* Taha K. Moriyama, Ayaka Nishi, Rei Sakuragi, Takuto Nakamura, Hiroyuki Kajimoto Abstract While
2B34 DEVELOPMENT OF A HYDRAULIC PARALLEL LINK TYPE OF FORCE DISPLAY
 2B34 DEVELOPMENT OF A HYDRAULIC PARALLEL LINK TYPE OF FORCE DISPLAY -Improvement of Manipulability Using Disturbance Observer and its Application to a Master-slave System- Shigeki KUDOMI*, Hironao YAMADA**
2B34 DEVELOPMENT OF A HYDRAULIC PARALLEL LINK TYPE OF FORCE DISPLAY -Improvement of Manipulability Using Disturbance Observer and its Application to a Master-slave System- Shigeki KUDOMI*, Hironao YAMADA**
Stabilize humanoid robot teleoperated by a RGB-D sensor
 Stabilize humanoid robot teleoperated by a RGB-D sensor Andrea Bisson, Andrea Busatto, Stefano Michieletto, and Emanuele Menegatti Intelligent Autonomous Systems Lab (IAS-Lab) Department of Information
Stabilize humanoid robot teleoperated by a RGB-D sensor Andrea Bisson, Andrea Busatto, Stefano Michieletto, and Emanuele Menegatti Intelligent Autonomous Systems Lab (IAS-Lab) Department of Information
Laser-Assisted Telerobotic Control for Enhancing Manipulation Capabilities of Persons with Disabilities
 The 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-22, 2010, Taipei, Taiwan Laser-Assisted Telerobotic Control for Enhancing Manipulation Capabilities of Persons with
The 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-22, 2010, Taipei, Taiwan Laser-Assisted Telerobotic Control for Enhancing Manipulation Capabilities of Persons with