Robotic Capture and De-Orbit of a Tumbling and Heavy Target from Low Earth Orbit
|
|
|
- Mark Douglas
- 5 years ago
- Views:
Transcription


 R.")
1 Chart 1 Robotic Capture and De-Orbit of a Tumbling and Heavy Target from Low Earth Orbit Steffen Jaekel, R. Lampariello, G. Panin, M. Sagardia, B. Brunner, O. Porges, and E. Kraemer (1) M. Wieser, R. Haarmann, and M. Pietras (2) R. Biesbroek (3) (1) German Aerospace Center (DLR), Robotics and Mechatronics Center (2) OHB System AG (3) ESTEC


2 Chart 2 Introduction Space Debris Source: ESA

 satellites for inspection: SPHERES - Robotic")
, extend or upgrade functionality (Hubble) - Hot topic: OOS")

3 Chart 3 Introduction Space Robotics LWR-III - Future and already deployed robot applications in space: - In-space robotic assembly (ISRA): SSRMS, SPDM - EVA assistance: SSRMS, Robonaut, DLR s Justin, (small) satellites for inspection: SPHERES - Robotic exploration: MER s - On-orbit servicing (OOS) for prolonging lifetime of operational satellites, repair & refuel (RRM), extend or upgrade functionality (Hubble) - Hot topic: OOS for active debris removal from LEO or reorbiting into graveyard orbit in GEO (DEOS) Justin ROKVISS - Dexterous manipulators play essential role robotic manipulation in space based on DLR s 7-DoF lightweight robot (LWR) Rokviss (middle) and 7-DoF space manipulator (bottom) with impedance control concept e.deorbit

4 Chart 4 Challenges of Robotic Spacecraft Source: Airbus, DLR
5 Chart 5 Source: Youtube (edited)
6 Chart 6 Challenges of Robotic Spacecraft for OOS - In general: complex contact operations in close-proximity - Unintended contact can lead to unsuccessful capture - uncertain environment (target not prepared for servicing) - Free-floating dynamics: manipulator has direct physical feedback on its floating base - Consequences: - Upon contact with capture tool, capture needs to be assured - High Attitude and Orbit Control System (AOCS) requirements - Distributed control problem, integrated spacecraft: Satellite turns into Space Robot - High computation power demands
7 Chart 7 Robot Capture Technology 1. Capture Operations 2. Arm Technology 3. Arm Camera System for Visual Servoing 4. Gripper 5. Stabilization 6. Clamping Device
8 Chart 8



9 Chart 9 Arm Technology - 7-DoF, total length of approx. 4m - Max. nominal torque of 160Nm - torque-based impedance control concept for compliant grasp - Redundant mechatronic design - Gripper for capturing Ariane launch adapter ring of ENVISAT - Stereo-camera system at arm wrist for visual servoing







10 Chart 10 Joint Technology - Integrated joint design from ROKVISS heritage with motor, brake, gear, position and torque sensor, and sensor electronics - Electronics integrated in arm assembly - EtherCAT bus system for single joint actuation in case of joint failure Cable conduit Torque sensor Joint position sensor Gear unit Motor with brake Torque and position electronics Joint bearing

11 Chart 11 Workspace Analysis - Capability map quantification of possible discretized directions in subspace - Analysis and verification of arm kinematics - Accounts for self-collision



12 Chart 12 Workspace Analysis Joint Failure



13 Chart 13 Manipulator Camera System - Edges on adapter ring used for model-based tracking - Vertical stereo layout z x y - Grasp point visible throughout the approach and grasp process

 - Only the ring structure is used for")
14 Chart 14 Simulation of Arm Approach - Approach from 1m distance (gripper to grasp frame) - Only the ring structure is used for tracking - Simulation yields grasp point estimation error
15 Chart 15 Visual Servoing Simulation Results Stereo - Visual Servoing using 4-DoF-estimation (rotation around center of cylinder and tangential translation are fixed), however all relevant dimensions for successful grasp are covered - Translational error below 1mm, rotational error below 0.2deg



16 Chart 16 Gripper Design z x y

 and pointshell model (gripper)")
 - Although not")
17 Chart 17 Robotic Grasp Simulation - Haptic real-time simulation using the Voxelmap-Pointshell (VPS) algorithm - Two kinds of models: voxel model (adapter ring) and pointshell model (gripper) with surface normal vectors, 3mm resolution both - Panelty-based method for calculating interaction force (buoyancy) - Although not optimal for the given problem, it yields a qualitative analysis of capture
18 Chart 18
19 Chart 19 Robotic Grasp Simulation Results (Position) - Plot: position of dynamic two-finger gripper bracket - Gripper is pulled towards the ring
20 Chart 20 Robotic Grasp Simulation Results (Force) - Plot: interaction forces acting on dynamic two-finger gripper bracket - Vertical and horizontal forces pull gripper towards the final grasp force

![torques at robot Time joint [sec] 6 during stabilization phase 50 Internal torques at robot joint 6 during stabilization phase 40 50 0.](/docs-images/86/94117372/images/21-1.jpg "5 deg/s Internal forces at robot joint 5 during stabilization phase 10 Force [N] Internal forces at robot joint 5 during stabilization phase 15 10 5 0 5 10 15 0 20 40 60 80 100 120 Time [sec]")
21 Chart 21 Rigidization Internal forces at robot joint 5 during stabilization phase Force [N] Time [sec] Internal torques at robot Time joint [sec] 6 during stabilization phase 50 Internal torques at robot joint 6 during stabilization phase deg/s Internal forces at robot joint 5 during stabilization phase 10 Force [N] Internal forces at robot joint 5 during stabilization phase Time [sec] Internal torques at robot joint 4 during stabilization phase 60 1 deg/s - Relative motion is actively damped out with the arm - High robustness w.r.t. residual relative motion between satellites Torque [Nm] Torque [Nm] Time [sec] Torque [Nm] Time [sec] Time [sec]

22 Chart 22 Clamping Mechanism - Seat on top of ENVISAT with aligned COG s - achieve stiff connection - arm only for re-positioning - Robust to surface unevenness and flexibility x y z

23 Chart 23 Ready for De-Orbit



24 Chart 24 The future of robots in space robotic exploration satellite servicing EVA support


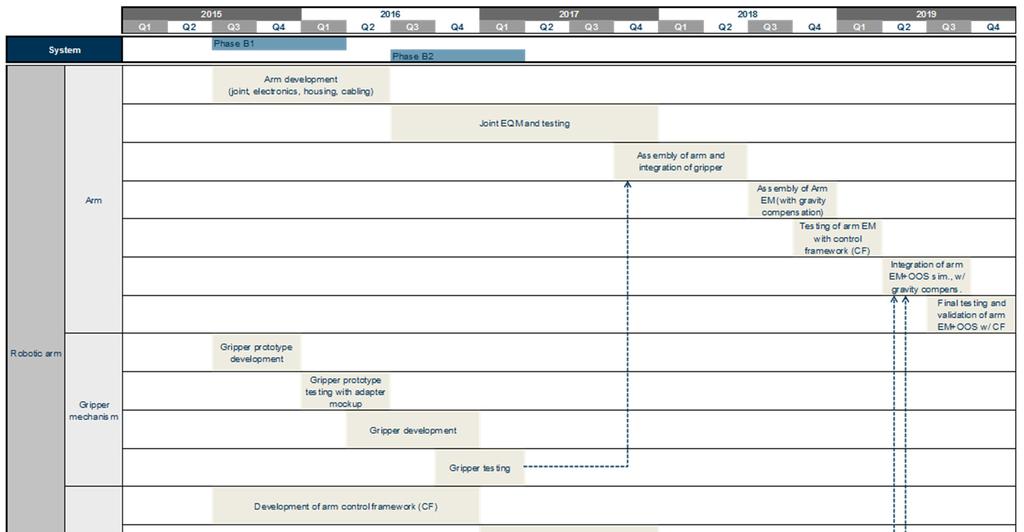
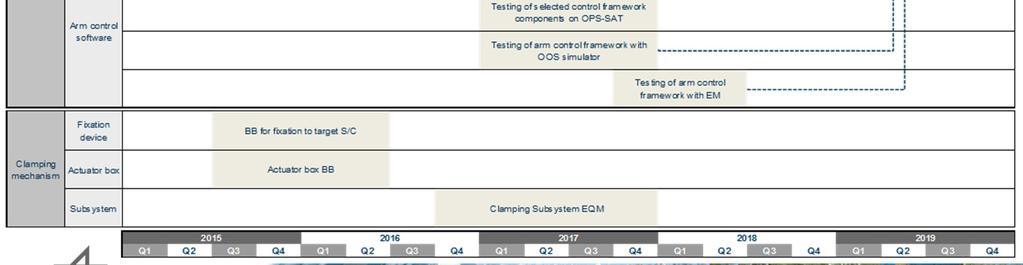
25 Chart 25 Development Approach - Independend joint testbed - DLR free-floating dynamics simulator with gravity compensation device (rope setup) - SoftwareL On-orbit verification of framework on ESA cubesat mission OPSSAT - simultaneous operation of robot control and additional avionics functions such as AOCS DLR HiL-OOS-Simulator (free-floating dynamics) OPS-SAT
26
27 Chart 27 AOCS Reaction to Arm Movement - Arm introduces disturbance forces and torques on its satellite base - Disturbances must be smaller that capabilities of AOCS during stabilized approach - Simulated AOCS reaction shows that resulting error in - Position < 6mm - Orientation < 0.5deg - Does not bring targeted grasp point out of FoV of arm camera

28 Chart 28 Capability Map Reachability Map: discretized structure describing reachable poses of robots end-effector Method of analysis accounts for Robot kinematics Self-collision Reachability index quantifies how well can a robot operate in a small subspace (voxel) of its workspace. The index is a per-voxel absolute measure of how many of the discretized directions are reachable by the endeffector. Within the blue area the end-effector has excellent manipulability for grasping, green indicates insufficient reachability
 - Sufficient results for mono-matching (position below 5mm, rotation below 0.")
29 Chart 29 Visual Servoing Simulation - Summary - Very accurate stereo results (position below 1mm, rotation below 0.2deg) - Sufficient results for mono-matching (position below 5mm, rotation below 0.2deg) - Mono results deal as worst-case assumption for updated error budget - Hardware-in-the-loop tests with adapter ring mockup and realistic lighting advised for further mission phases to check effects reflections (MLI & radiator tape)
30 Chart 30 Visual Servoing Simulation Results Mono - Translational error below 5mm, rotational error below 0.2deg during final approach - Used as worst-case assumptions for updated error budget
31 Chart 31 Robotic Grasp Simulation Summary - Execution of multiple start configurations with representative errors in all axes - The gripper was never pushed out, in contrast it was pulled towards the ring through the inclined area of contact - VPS method is not optimal for the given full force closure problem, only limited realness through - Temporal discretization (real-time), one cycle (1ms) computation time - Spatial discretization (model detail) - Oscillations when grasped - Internal forces are not equalized - However, direction of generated force is empirically proven to be accurate - Simulation could show general feasibility of chosen approach
RobOps Approaching a Holistic and Unified Interface Service Definition for Future Robotic Spacecraft
 www.dlr.de Chart 1 RobOps Approaching a Holistic and Unified Interface Service Definition for Future Robotic Spacecraft Steffen Jaekel, Bernhard Brunner (1) Christian Laroque, Zoran Pjevic (2) Felix Flentge
www.dlr.de Chart 1 RobOps Approaching a Holistic and Unified Interface Service Definition for Future Robotic Spacecraft Steffen Jaekel, Bernhard Brunner (1) Christian Laroque, Zoran Pjevic (2) Felix Flentge
Tool Chains for Simulation and Experimental Validation of Orbital Robotic Technologies
 DLR.de Chart 1 > The Next Generation of Space Robotic Servicing Technologies > Ch. Borst Exploration of Orbital Robotic Technologies > 26.05.2015 Tool Chains for Simulation and Experimental Validation
DLR.de Chart 1 > The Next Generation of Space Robotic Servicing Technologies > Ch. Borst Exploration of Orbital Robotic Technologies > 26.05.2015 Tool Chains for Simulation and Experimental Validation
The DLR On-Orbit Servicing Testbed
 The DLR On-Orbit Servicing Testbed J. Artigas, R. Lampariello, B. Brunner, M. Stelzer, C. Borst, K. Landzettel, G. Hirzinger, A. Albu-Schäffer Robotics and Mechatronics Center, DLR VR-OOS Workshop 2012
The DLR On-Orbit Servicing Testbed J. Artigas, R. Lampariello, B. Brunner, M. Stelzer, C. Borst, K. Landzettel, G. Hirzinger, A. Albu-Schäffer Robotics and Mechatronics Center, DLR VR-OOS Workshop 2012
A Modular Architecture for an Interactive Real-Time Simulation and Training Environment for Satellite On-Orbit Servicing
 A Modular Architecture for an Interactive Real-Time Simulation and Training Environment for Satellite On-Orbit Servicing Robin Wolff German Aerospace Center (DLR), Germany Slide 1 Outline! Motivation!
A Modular Architecture for an Interactive Real-Time Simulation and Training Environment for Satellite On-Orbit Servicing Robin Wolff German Aerospace Center (DLR), Germany Slide 1 Outline! Motivation!
End-to-End Simulation and Verification of Rendezvous and Docking/Berthing Systems using Robotics
 Session 9 Special Test End-to-End Simulation and Verification of Rendezvous and Docking/Berthing Systems using Robotics Author(s): H. Benninghoff, F. Rems, M. Gnat, R. Faller, R. Krenn, M. Stelzer, B.
Session 9 Special Test End-to-End Simulation and Verification of Rendezvous and Docking/Berthing Systems using Robotics Author(s): H. Benninghoff, F. Rems, M. Gnat, R. Faller, R. Krenn, M. Stelzer, B.
Development of the clamping mechanism
 Phase B1 Development of the clamping mechanism for Active Debris Removal missions Agenda Introduction Clamping scenarios Hold-downs Launch Adapter Ring Trade-off Overview of the clamping mechanism Baseline
Phase B1 Development of the clamping mechanism for Active Debris Removal missions Agenda Introduction Clamping scenarios Hold-downs Launch Adapter Ring Trade-off Overview of the clamping mechanism Baseline
The Design of key mechanical functions for a super multi-dof and extendable Space Robotic Arm
 The Design of key mechanical functions for a super multi-dof and extendable Space Robotic Arm Kent Yoshikawa*, Yuichiro Tanaka**, Mitsushige Oda***, Hiroki Nakanishi**** *Tokyo Institute of Technology,
The Design of key mechanical functions for a super multi-dof and extendable Space Robotic Arm Kent Yoshikawa*, Yuichiro Tanaka**, Mitsushige Oda***, Hiroki Nakanishi**** *Tokyo Institute of Technology,
13/11/2013. German Aerospace Center. Virtual Reality for Planning and Controlling of Robot-based Servicing in Space. German Aerospace Center
 DLR.de Chart 1 DLR.de Chart 4 German Aerospace Center Virtual Reality for Planning and Controlling of Robot-based Servicing in Space Andreas Gerndt German Aerospace Center (DLR) Simulation and Software
DLR.de Chart 1 DLR.de Chart 4 German Aerospace Center Virtual Reality for Planning and Controlling of Robot-based Servicing in Space Andreas Gerndt German Aerospace Center (DLR) Simulation and Software
ROKVISS Verification of Advanced Tele-Presence Concepts for Future Space Missions
 ROKVISS Verification of Advanced Tele-Presence Concepts for Future Space Missions ASTRA 2002 Klaus Landzettel, Bernhard Brunner, Alexander Beyer, Erich Krämer, Carsten Preusche, Bernhard-Michael Steinmetz,
ROKVISS Verification of Advanced Tele-Presence Concepts for Future Space Missions ASTRA 2002 Klaus Landzettel, Bernhard Brunner, Alexander Beyer, Erich Krämer, Carsten Preusche, Bernhard-Michael Steinmetz,
Canadian Activities in Intelligent Robotic Systems - An Overview
 In Proceedings of the 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2004' ESTEC, Noordwijk, The Netherlands, November 2-4, 2004 Canadian Activities in Intelligent Robotic
In Proceedings of the 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2004' ESTEC, Noordwijk, The Netherlands, November 2-4, 2004 Canadian Activities in Intelligent Robotic
A Unified Ground Control and Programming Methodology for Space Robotics Applications Demonstrations on ETS-VII
 A Unified Ground Control and Programming Methodology for Space Robotics Applications Demonstrations on ETS-VII K. Landzettel, B. Brunner, G. Hirzinger, R. Lampariello, G. Schreiber, B.-M. Steinmetz DLR
A Unified Ground Control and Programming Methodology for Space Robotics Applications Demonstrations on ETS-VII K. Landzettel, B. Brunner, G. Hirzinger, R. Lampariello, G. Schreiber, B.-M. Steinmetz DLR
CubeSat Integration into the Space Situational Awareness Architecture
 CubeSat Integration into the Space Situational Awareness Architecture Keith Morris, Chris Rice, Mark Wolfson Lockheed Martin Space Systems Company 12257 S. Wadsworth Blvd. Mailstop S6040 Littleton, CO
CubeSat Integration into the Space Situational Awareness Architecture Keith Morris, Chris Rice, Mark Wolfson Lockheed Martin Space Systems Company 12257 S. Wadsworth Blvd. Mailstop S6040 Littleton, CO
Design and Control of the BUAA Four-Fingered Hand
 Proceedings of the 2001 IEEE International Conference on Robotics & Automation Seoul, Korea May 21-26, 2001 Design and Control of the BUAA Four-Fingered Hand Y. Zhang, Z. Han, H. Zhang, X. Shang, T. Wang,
Proceedings of the 2001 IEEE International Conference on Robotics & Automation Seoul, Korea May 21-26, 2001 Design and Control of the BUAA Four-Fingered Hand Y. Zhang, Z. Han, H. Zhang, X. Shang, T. Wang,
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute Use an example to explain what is admittance control? You may refer to exoskeleton
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute Use an example to explain what is admittance control? You may refer to exoskeleton
Integrated Technology Concept for Robotic On-Orbit Servicing Systems
 Integrated Technology Concept for Robotic On-Orbit Servicing Systems Bernd Maediger, Airbus DS GmbH Bremen, Germany Visual-based navigation Manipulation Grasping Non-cooperative target GNC Visual-based
Integrated Technology Concept for Robotic On-Orbit Servicing Systems Bernd Maediger, Airbus DS GmbH Bremen, Germany Visual-based navigation Manipulation Grasping Non-cooperative target GNC Visual-based
VR-OOS System Architecture Workshop zu interaktiven VR-Technologien für On-Orbit Servicing
 www.dlr.de Chart 1 > VR-OOS System Architecture > Robin Wolff VR-OOS Workshop 09/10.10.2012 VR-OOS System Architecture Workshop zu interaktiven VR-Technologien für On-Orbit Servicing Robin Wolff DLR, and
www.dlr.de Chart 1 > VR-OOS System Architecture > Robin Wolff VR-OOS Workshop 09/10.10.2012 VR-OOS System Architecture Workshop zu interaktiven VR-Technologien für On-Orbit Servicing Robin Wolff DLR, and
Design for Removal. Executive Summary Report
 ISSUE : 1 Page : 1/15 Design for Removal Executive Summary Report ESA STUDY CONTRACT REPORT ESA Contract No: 4000116081/15/NL/GL C/as SUBJECT: Design for Removal CONTRACTOR: Thales Alenia Space NAME OF
ISSUE : 1 Page : 1/15 Design for Removal Executive Summary Report ESA STUDY CONTRACT REPORT ESA Contract No: 4000116081/15/NL/GL C/as SUBJECT: Design for Removal CONTRACTOR: Thales Alenia Space NAME OF
HexGen HEX HL Hexapod Six-DOF Positioning System
 HexGen HE300-230HL Hexapods and Robotics HexGen HE300-230HL Hexapod Six-DOF Positioning System Six degree-of-freedom positioning with linear travels to 60 mm and angular travels to 30 Precision design
HexGen HE300-230HL Hexapods and Robotics HexGen HE300-230HL Hexapod Six-DOF Positioning System Six degree-of-freedom positioning with linear travels to 60 mm and angular travels to 30 Precision design
Laboratory Mini-Projects Summary
 ME 4290/5290 Mechanics & Control of Robotic Manipulators Dr. Bob, Fall 2017 Robotics Laboratory Mini-Projects (LMP 1 8) Laboratory Exercises: The laboratory exercises are to be done in teams of two (or
ME 4290/5290 Mechanics & Control of Robotic Manipulators Dr. Bob, Fall 2017 Robotics Laboratory Mini-Projects (LMP 1 8) Laboratory Exercises: The laboratory exercises are to be done in teams of two (or
Rome, Changing of the Requirements and Astrofein s Business Models for Cubesat Deployer
 Rome, 07.12.2017 4 th IAA Conference on University Satellite Missions and Cubesat Workshop Changing of the Requirements and Astrofein s Business Models for Cubesat Deployer Stephan Roemer Head of Space
Rome, 07.12.2017 4 th IAA Conference on University Satellite Missions and Cubesat Workshop Changing of the Requirements and Astrofein s Business Models for Cubesat Deployer Stephan Roemer Head of Space
Clean Space. A new cross-cutting initiative of ESA. The Clean Space Team 15/04/2013. ESA UNCLASSIFIED For Official Use
 Clean Space A new cross-cutting initiative of ESA The Clean Space Team 15/04/2013 Index Introduction Clean Space Branch 3 Space debris mitigation Branch 4 Space debris remediation Implementation Conclusions
Clean Space A new cross-cutting initiative of ESA The Clean Space Team 15/04/2013 Index Introduction Clean Space Branch 3 Space debris mitigation Branch 4 Space debris remediation Implementation Conclusions
Introduction to robotics. Md. Ferdous Alam, Lecturer, MEE, SUST
 Introduction to robotics Md. Ferdous Alam, Lecturer, MEE, SUST Hello class! Let s watch a video! So, what do you think? It s cool, isn t it? The dedication is not! A brief history The first digital and
Introduction to robotics Md. Ferdous Alam, Lecturer, MEE, SUST Hello class! Let s watch a video! So, what do you think? It s cool, isn t it? The dedication is not! A brief history The first digital and
Optical Correlator for Image Motion Compensation in the Focal Plane of a Satellite Camera
 15 th IFAC Symposium on Automatic Control in Aerospace Bologna, September 6, 2001 Optical Correlator for Image Motion Compensation in the Focal Plane of a Satellite Camera K. Janschek, V. Tchernykh, -
15 th IFAC Symposium on Automatic Control in Aerospace Bologna, September 6, 2001 Optical Correlator for Image Motion Compensation in the Focal Plane of a Satellite Camera K. Janschek, V. Tchernykh, -
Robust Haptic Teleoperation of a Mobile Manipulation Platform
 Robust Haptic Teleoperation of a Mobile Manipulation Platform Jaeheung Park and Oussama Khatib Stanford AI Laboratory Stanford University http://robotics.stanford.edu Abstract. This paper presents a new
Robust Haptic Teleoperation of a Mobile Manipulation Platform Jaeheung Park and Oussama Khatib Stanford AI Laboratory Stanford University http://robotics.stanford.edu Abstract. This paper presents a new
HexGen HEX HL Hexapod Six-DOF Positioning System
 HexGen HE300-230HL Hexapods and Robotics HexGen HE300-230HL Hexapod Six-DOF Positioning System Six degree-of-freedom positioning with linear travels to 60 mm and angular travels to 30 Precision design
HexGen HE300-230HL Hexapods and Robotics HexGen HE300-230HL Hexapod Six-DOF Positioning System Six degree-of-freedom positioning with linear travels to 60 mm and angular travels to 30 Precision design
Technical Cognitive Systems
 Part XII Actuators 3 Outline Robot Bases Hardware Components Robot Arms 4 Outline Robot Bases Hardware Components Robot Arms 5 (Wheeled) Locomotion Goal: Bring the robot to a desired pose (x, y, θ): (position
Part XII Actuators 3 Outline Robot Bases Hardware Components Robot Arms 4 Outline Robot Bases Hardware Components Robot Arms 5 (Wheeled) Locomotion Goal: Bring the robot to a desired pose (x, y, θ): (position
VALERI - A COLLABORATIVE MOBILE MANIPULATOR FOR AEROSPACE PRODUCTION. CLAWAR 2016, London, UK Fraunhofer IFF Robotersysteme
 VALERI - A COLLABORATIVE MOBILE MANIPULATOR FOR AEROSPACE PRODUCTION CLAWAR 2016, London, UK Fraunhofer IFF Robotersysteme Fraunhofer IFF, Magdeburg 2016 VALERI - A collaborative mobile manipulator for
VALERI - A COLLABORATIVE MOBILE MANIPULATOR FOR AEROSPACE PRODUCTION CLAWAR 2016, London, UK Fraunhofer IFF Robotersysteme Fraunhofer IFF, Magdeburg 2016 VALERI - A collaborative mobile manipulator for
HexGen HEX HL Hexapod Six-DOF Positioning System
 HexGen HE300-230HL Hexapods and Robotics HexGen HE300-230HL Hexapod Six-DOF Positioning System Six degree-of-freedom positioning with linear travels to 60 mm and angular travels to 30 Precision design
HexGen HE300-230HL Hexapods and Robotics HexGen HE300-230HL Hexapod Six-DOF Positioning System Six degree-of-freedom positioning with linear travels to 60 mm and angular travels to 30 Precision design
Automation & Robotics (A&R) for Space Applications in the German Space Program
 for Space Applications in the German Space Program") B. Sommer, RD-RR 1 Automation & Robotics (A&R) for Space Applications in the German Space Program ASTRA 2002 ESTEC, November 2002 1 2 Current and future application areas Unmanned exploration of the cold
B. Sommer, RD-RR 1 Automation & Robotics (A&R) for Space Applications in the German Space Program ASTRA 2002 ESTEC, November 2002 1 2 Current and future application areas Unmanned exploration of the cold
Chapter 2 Introduction to Haptics 2.1 Definition of Haptics
 Chapter 2 Introduction to Haptics 2.1 Definition of Haptics The word haptic originates from the Greek verb hapto to touch and therefore refers to the ability to touch and manipulate objects. The haptic
Chapter 2 Introduction to Haptics 2.1 Definition of Haptics The word haptic originates from the Greek verb hapto to touch and therefore refers to the ability to touch and manipulate objects. The haptic
Relative Cost and Performance Comparison of GEO Space Situational Awareness Architectures
 Relative Cost and Performance Comparison of GEO Space Situational Awareness Architectures Background Keith Morris Lockheed Martin Space Systems Company Chris Rice Lockheed Martin Space Systems Company
Relative Cost and Performance Comparison of GEO Space Situational Awareness Architectures Background Keith Morris Lockheed Martin Space Systems Company Chris Rice Lockheed Martin Space Systems Company
Hyper-spectral, UHD imaging NANO-SAT formations or HAPS to detect, identify, geolocate and track; CBRN gases, fuel vapors and other substances
 Hyper-spectral, UHD imaging NANO-SAT formations or HAPS to detect, identify, geolocate and track; CBRN gases, fuel vapors and other substances Arnold Kravitz 8/3/2018 Patent Pending US/62544811 1 HSI and
Hyper-spectral, UHD imaging NANO-SAT formations or HAPS to detect, identify, geolocate and track; CBRN gases, fuel vapors and other substances Arnold Kravitz 8/3/2018 Patent Pending US/62544811 1 HSI and
Robotic System Simulation and Modeling Stefan Jörg Robotic and Mechatronic Center
 Robotic System Simulation and ing Stefan Jörg Robotic and Mechatronic Center Outline Introduction The SAFROS Robotic System Simulator Robotic System ing Conclusions Folie 2 DLR s Mirosurge: A versatile
Robotic System Simulation and ing Stefan Jörg Robotic and Mechatronic Center Outline Introduction The SAFROS Robotic System Simulator Robotic System ing Conclusions Folie 2 DLR s Mirosurge: A versatile
More Info at Open Access Database by S. Dutta and T. Schmidt
 More Info at Open Access Database www.ndt.net/?id=17657 New concept for higher Robot position accuracy during thermography measurement to be implemented with the existing prototype automated thermography
More Info at Open Access Database www.ndt.net/?id=17657 New concept for higher Robot position accuracy during thermography measurement to be implemented with the existing prototype automated thermography
Robin Biesbroek European Space Agency e.deorbit study manager ESTEC-TEC/SYE, PO Box 299, 2200 AG, Noordwijk, The Netherlands
 ESA s e.deorbit mission and its roadmap to Active Debris Removal Robin Biesbroek European Space Agency e.deorbit study manager ESTEC-TEC/SYE, PO Box 299, 2200 AG, Noordwijk, The Netherlands Robin.biesbroek@esa.int
ESA s e.deorbit mission and its roadmap to Active Debris Removal Robin Biesbroek European Space Agency e.deorbit study manager ESTEC-TEC/SYE, PO Box 299, 2200 AG, Noordwijk, The Netherlands Robin.biesbroek@esa.int
Robotics 2 Collision detection and robot reaction
 Robotics 2 Collision detection and robot reaction Prof. Alessandro De Luca Handling of robot collisions! safety in physical Human-Robot Interaction (phri)! robot dependability (i.e., beyond reliability)!
Robotics 2 Collision detection and robot reaction Prof. Alessandro De Luca Handling of robot collisions! safety in physical Human-Robot Interaction (phri)! robot dependability (i.e., beyond reliability)!
Bruno Siciliano Luigi Villani Vincenzo Lippiello. Francesca Cordella Mariacarla Staffa.
 1/20 Robotics @ PRISMA Lab Bruno Siciliano Luigi Villani Vincenzo Lippiello Fanny Ficuciello i Fabio Ruggiero Francesca Cordella Mariacarla Staffa www.prisma.unina.it i it 18 February 2010 City 1,200,000
1/20 Robotics @ PRISMA Lab Bruno Siciliano Luigi Villani Vincenzo Lippiello Fanny Ficuciello i Fabio Ruggiero Francesca Cordella Mariacarla Staffa www.prisma.unina.it i it 18 February 2010 City 1,200,000
GNC/AOCS DEVELOPMENT SYSTEM FOR RENDEZ-VOUS AND DOCKING MISSIONS AT SENER, AND ASSOCIATED TEST FACILITIES
 . GNC/AOCS DEVELOPMENT SYSTEM FOR RENDEZ-VOUS AND DOCKING MISSIONS AT SENER, AND ASSOCIATED TEST FACILITIES Gonzalo Saavedra, Antonio Ayuso, Juan Manuel del Cura, Jose Maria Fernandez, Salvador Llorente,
. GNC/AOCS DEVELOPMENT SYSTEM FOR RENDEZ-VOUS AND DOCKING MISSIONS AT SENER, AND ASSOCIATED TEST FACILITIES Gonzalo Saavedra, Antonio Ayuso, Juan Manuel del Cura, Jose Maria Fernandez, Salvador Llorente,
3-Axis Attitude Determination and Control of the AeroCube-4 CubeSats
 3-Axis Attitude Determination and Control of the AeroCube-4 CubeSats Darren Rowen Rick Dolphus The Aerospace Corporation Vehicle Systems Division 10 August 2013 The Aerospace Corporation 2013 Topics AeroCube
3-Axis Attitude Determination and Control of the AeroCube-4 CubeSats Darren Rowen Rick Dolphus The Aerospace Corporation Vehicle Systems Division 10 August 2013 The Aerospace Corporation 2013 Topics AeroCube
Design and Control of an Anthropomorphic Robotic Arm
 Journal Of Industrial Engineering Research ISSN- 2077-4559 Journal home page: http://www.iwnest.com/ijer/ 2016. 2(1): 1-8 RSEARCH ARTICLE Design and Control of an Anthropomorphic Robotic Arm Simon A/L
Journal Of Industrial Engineering Research ISSN- 2077-4559 Journal home page: http://www.iwnest.com/ijer/ 2016. 2(1): 1-8 RSEARCH ARTICLE Design and Control of an Anthropomorphic Robotic Arm Simon A/L
Humanoid Hands. CHENG Gang Dec Rollin Justin Robot.mp4
 Humanoid Hands CHENG Gang Dec. 2009 Rollin Justin Robot.mp4 Behind the Video Motivation of humanoid hand Serve the people whatever difficult Behind the Video Challenge to humanoid hand Dynamics How to
Humanoid Hands CHENG Gang Dec. 2009 Rollin Justin Robot.mp4 Behind the Video Motivation of humanoid hand Serve the people whatever difficult Behind the Video Challenge to humanoid hand Dynamics How to
Preliminary Design Review
 Proximity Identification, characterization, And Neutralization by thinking before Acquisition (PIRANHA) Preliminary Design Review Customer: Barbara Bicknell Jeffrey Weber Team: Aaron Buysse Kevin Rauhauser
Proximity Identification, characterization, And Neutralization by thinking before Acquisition (PIRANHA) Preliminary Design Review Customer: Barbara Bicknell Jeffrey Weber Team: Aaron Buysse Kevin Rauhauser
Unmanned on-orbit servicing (OOS), ROKVISS and the TECSAS mission
, ROKVISS and the TECSAS mission") In Proceedings of the 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2004' ESTEC, Noordwijk, The Netherlands, November 2-4, 2004 On-Orbit Servicing (OOS), ROKVISS and
In Proceedings of the 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2004' ESTEC, Noordwijk, The Netherlands, November 2-4, 2004 On-Orbit Servicing (OOS), ROKVISS and
Optimal Motion Planning of a Space Robot with Base Disturbance Minimization
 Optimal Motion Planning of a Space Robot with Base Disturbance Minimization Authors: Eric Kaigom, Thomas Jung, Jürgen Rossmann Institute forman MachineInteraction, RWTH Aachen University 1 Virtualize Robotic
Optimal Motion Planning of a Space Robot with Base Disturbance Minimization Authors: Eric Kaigom, Thomas Jung, Jürgen Rossmann Institute forman MachineInteraction, RWTH Aachen University 1 Virtualize Robotic
Modeling and Experimental Studies of a Novel 6DOF Haptic Device
 Proceedings of The Canadian Society for Mechanical Engineering Forum 2010 CSME FORUM 2010 June 7-9, 2010, Victoria, British Columbia, Canada Modeling and Experimental Studies of a Novel DOF Haptic Device
Proceedings of The Canadian Society for Mechanical Engineering Forum 2010 CSME FORUM 2010 June 7-9, 2010, Victoria, British Columbia, Canada Modeling and Experimental Studies of a Novel DOF Haptic Device
Prof. Ciro Natale. Francesco Castaldo Andrea Cirillo Pasquale Cirillo Umberto Ferrara Luigi Palmieri
 Real Time Control of an Anthropomorphic Robotic Arm using FPGA Advisor: Prof. Ciro Natale Students: Francesco Castaldo Andrea Cirillo Pasquale Cirillo Umberto Ferrara Luigi Palmieri Objective Introduction
Real Time Control of an Anthropomorphic Robotic Arm using FPGA Advisor: Prof. Ciro Natale Students: Francesco Castaldo Andrea Cirillo Pasquale Cirillo Umberto Ferrara Luigi Palmieri Objective Introduction
Space Robot. SIPNA College of Engineering and Technology, Amravati.
 International Journal of Engineering Inventions ISSN: 2278-7461, www.ijeijournal.com Volume 1, Issue 7 (October2012) PP: 60-67 Space Robot Miss. Shweta Kale 1, Miss. Gayatri Patole 2, Miss. Mohoni Mohurle
International Journal of Engineering Inventions ISSN: 2278-7461, www.ijeijournal.com Volume 1, Issue 7 (October2012) PP: 60-67 Space Robot Miss. Shweta Kale 1, Miss. Gayatri Patole 2, Miss. Mohoni Mohurle
Development of Hybrid Flight Simulator with Multi Degree-of-Freedom Robot
 Development of Hybrid Flight Simulator with Multi Degree-of-Freedom Robot Kakizaki Kohei, Nakajima Ryota, Tsukabe Naoki Department of Aerospace Engineering Department of Mechanical System Design Engineering
Development of Hybrid Flight Simulator with Multi Degree-of-Freedom Robot Kakizaki Kohei, Nakajima Ryota, Tsukabe Naoki Department of Aerospace Engineering Department of Mechanical System Design Engineering
The Haptic Impendance Control through Virtual Environment Force Compensation
 The Haptic Impendance Control through Virtual Environment Force Compensation OCTAVIAN MELINTE Robotics and Mechatronics Department Institute of Solid Mechanicsof the Romanian Academy ROMANIA octavian.melinte@yahoo.com
The Haptic Impendance Control through Virtual Environment Force Compensation OCTAVIAN MELINTE Robotics and Mechatronics Department Institute of Solid Mechanicsof the Romanian Academy ROMANIA octavian.melinte@yahoo.com
FlexCore: Low-Cost Attitude Determination and Control Enabling High-Performance Small Spacecraft
 SSC16-X-7 FlexCore: Low-Cost Attitude Determination and Control Enabling High-Performance Small Spacecraft Daniel Hegel Blue Canyon Technologies 2425 55 th St. Suite A-200, Boulder, CO, 80301; 720 458-0703
SSC16-X-7 FlexCore: Low-Cost Attitude Determination and Control Enabling High-Performance Small Spacecraft Daniel Hegel Blue Canyon Technologies 2425 55 th St. Suite A-200, Boulder, CO, 80301; 720 458-0703
Robotics: Evolution, Technology and Applications
 Robotics: Evolution, Technology and Applications By: Dr. Hamid D. Taghirad Head of Control Group, and Department of Electrical Engineering K.N. Toosi University of Tech. Department of Electrical Engineering
Robotics: Evolution, Technology and Applications By: Dr. Hamid D. Taghirad Head of Control Group, and Department of Electrical Engineering K.N. Toosi University of Tech. Department of Electrical Engineering
Model Based AOCS Design and Automatic Flight Code Generation: Experience and Future Development
 ADCSS 2016 October 20, 2016 Model Based AOCS Design and Automatic Flight Code Generation: Experience and Future Development SATELLITE SYSTEMS Per Bodin Head of AOCS Department OHB Sweden Outline Company
ADCSS 2016 October 20, 2016 Model Based AOCS Design and Automatic Flight Code Generation: Experience and Future Development SATELLITE SYSTEMS Per Bodin Head of AOCS Department OHB Sweden Outline Company
John Henry Foster INTRODUCING OUR NEW ROBOTICS LINE. Imagine Your Business...better. Automate Virtually Anything jhfoster.
 John Henry Foster INTRODUCING OUR NEW ROBOTICS LINE Imagine Your Business...better. Automate Virtually Anything 800.582.5162 John Henry Foster 800.582.5162 What if you could automate the repetitive manual
John Henry Foster INTRODUCING OUR NEW ROBOTICS LINE Imagine Your Business...better. Automate Virtually Anything 800.582.5162 John Henry Foster 800.582.5162 What if you could automate the repetitive manual
Parallel Robot Projects at Ohio University
 Parallel Robot Projects at Ohio University Robert L. Williams II with graduate students: John Hall, Brian Hopkins, Atul Joshi, Josh Collins, Jigar Vadia, Dana Poling, and Ron Nyzen And Special Thanks to:
Parallel Robot Projects at Ohio University Robert L. Williams II with graduate students: John Hall, Brian Hopkins, Atul Joshi, Josh Collins, Jigar Vadia, Dana Poling, and Ron Nyzen And Special Thanks to:
UWE-4: Integration State of the First Electrically Propelled 1U CubeSat
 UWE-4: Integration State of the First Electrically Propelled 1U CubeSat Small Satellite Conference 2017 Philip Bangert A. Kramer, K. Schilling University Würzburg University Würzburg Experimental Satellites
UWE-4: Integration State of the First Electrically Propelled 1U CubeSat Small Satellite Conference 2017 Philip Bangert A. Kramer, K. Schilling University Würzburg University Würzburg Experimental Satellites
Real-Time AOCS EGSE Using EuroSim and SMP2-Compliant Building Blocks
 UNCLASSIFIED Nationaal Lucht- en Ruimtevaartlaboratorium National Aerospace Laboratory NLR Executive summary Real-Time AOCS EGSE Using EuroSim and SMP2-Compliant Building Blocks Environment control torque
UNCLASSIFIED Nationaal Lucht- en Ruimtevaartlaboratorium National Aerospace Laboratory NLR Executive summary Real-Time AOCS EGSE Using EuroSim and SMP2-Compliant Building Blocks Environment control torque
e.deorbit Implementation Plan
 ESA UNCLASSIFIED Releasable to the Public /estec/ European Space Research and Technology Centre Keplerlaan 1 2201 AZ Noordwijk The Netherlands T +31 (0)71 565 6565 F +31 (0)71 565 6040 www.esa.int Prepared
ESA UNCLASSIFIED Releasable to the Public /estec/ European Space Research and Technology Centre Keplerlaan 1 2201 AZ Noordwijk The Netherlands T +31 (0)71 565 6565 F +31 (0)71 565 6040 www.esa.int Prepared
A Review of Robotics Technologies for On-Orbit Services
 A Review of Robotics Technologies for On-Orbit Services Angel Flores-Abad and Ou Ma Department of Mechanical and Aerospace Engineering New Mexico State University, Las Cruces, New Mexico 88003, USA af_abad@nmsu.edu
A Review of Robotics Technologies for On-Orbit Services Angel Flores-Abad and Ou Ma Department of Mechanical and Aerospace Engineering New Mexico State University, Las Cruces, New Mexico 88003, USA af_abad@nmsu.edu
Advanced robotics for Industry 4.0. Michael Valášek, Martin Nečas CTU in Prague, Faculty of Mechanical Engineering
 Advanced robotics for Industry 4.0 Michael Valášek, Martin Nečas CTU in Prague, Faculty of Mechanical Engineering Scope of presentation Directions of current research Examples of advanced robotics Conclusion
Advanced robotics for Industry 4.0 Michael Valášek, Martin Nečas CTU in Prague, Faculty of Mechanical Engineering Scope of presentation Directions of current research Examples of advanced robotics Conclusion
1 st IFAC Conference on Mechatronic Systems - Mechatronics 2000, September 18-20, 2000, Darmstadt, Germany
 1 st IFAC Conference on Mechatronic Systems - Mechatronics 2000, September 18-20, 2000, Darmstadt, Germany SPACE APPLICATION OF A SELF-CALIBRATING OPTICAL PROCESSOR FOR HARSH MECHANICAL ENVIRONMENT V.
1 st IFAC Conference on Mechatronic Systems - Mechatronics 2000, September 18-20, 2000, Darmstadt, Germany SPACE APPLICATION OF A SELF-CALIBRATING OPTICAL PROCESSOR FOR HARSH MECHANICAL ENVIRONMENT V.
Skyworker: Robotics for Space Assembly, Inspection and Maintenance
 Skyworker: Robotics for Space Assembly, Inspection and Maintenance Sarjoun Skaff, Carnegie Mellon University Peter J. Staritz, Carnegie Mellon University William Whittaker, Carnegie Mellon University Abstract
Skyworker: Robotics for Space Assembly, Inspection and Maintenance Sarjoun Skaff, Carnegie Mellon University Peter J. Staritz, Carnegie Mellon University William Whittaker, Carnegie Mellon University Abstract
Design of a High-Performance Humanoid Dual Arm System with Inner Shoulder Joints
 Design of a High-Performance Humanoid Dual Arm System with Inner Shoulder Joints Samuel Rader, Lukas Kaul, Hennes Fischbach, Nikolaus Vahrenkamp and Tamim Asfour Abstract This paper presents the design
Design of a High-Performance Humanoid Dual Arm System with Inner Shoulder Joints Samuel Rader, Lukas Kaul, Hennes Fischbach, Nikolaus Vahrenkamp and Tamim Asfour Abstract This paper presents the design
TAR: A Twin Arm Robot for Dexterous Assembly and Maintenance Tasks on ISS
 TAR: A Twin Arm Robot for Dexterous Assembly and Maintenance Tasks on ISS C.J.M. Heemskerk, M. Visser Fokker Space, Newtonweg 1, 2303 DB Leiden, The Netherlands C.Heemskerk@fokkerspace.nl, phone +31715245427,
TAR: A Twin Arm Robot for Dexterous Assembly and Maintenance Tasks on ISS C.J.M. Heemskerk, M. Visser Fokker Space, Newtonweg 1, 2303 DB Leiden, The Netherlands C.Heemskerk@fokkerspace.nl, phone +31715245427,
Information and Program
 Robotics 1 Information and Program Prof. Alessandro De Luca Robotics 1 1 Robotics 1 2017/18! First semester (12 weeks)! Monday, October 2, 2017 Monday, December 18, 2017! Courses of study (with this course
Robotics 1 Information and Program Prof. Alessandro De Luca Robotics 1 1 Robotics 1 2017/18! First semester (12 weeks)! Monday, October 2, 2017 Monday, December 18, 2017! Courses of study (with this course
Application of Gain Scheduling Technique to a 6-Axis Articulated Robot using LabVIEW R
 Application of Gain Scheduling Technique to a 6-Axis Articulated Robot using LabVIEW R ManSu Kim #,1, WonJee Chung #,2, SeungWon Jeong #,3 # School of Mechatronics, Changwon National University Changwon,
Application of Gain Scheduling Technique to a 6-Axis Articulated Robot using LabVIEW R ManSu Kim #,1, WonJee Chung #,2, SeungWon Jeong #,3 # School of Mechatronics, Changwon National University Changwon,
Chapter 1 Introduction
 Chapter 1 Introduction It is appropriate to begin the textbook on robotics with the definition of the industrial robot manipulator as given by the ISO 8373 standard. An industrial robot manipulator is
Chapter 1 Introduction It is appropriate to begin the textbook on robotics with the definition of the industrial robot manipulator as given by the ISO 8373 standard. An industrial robot manipulator is
Design of a Free Space Optical Communication Module for Small Satellites
 Design of a Free Space Optical Communication Module for Small Satellites Ryan W. Kingsbury, Kathleen Riesing Prof. Kerri Cahoy MIT Space Systems Lab AIAA/USU Small Satellite Conference August 6 2014 Problem
Design of a Free Space Optical Communication Module for Small Satellites Ryan W. Kingsbury, Kathleen Riesing Prof. Kerri Cahoy MIT Space Systems Lab AIAA/USU Small Satellite Conference August 6 2014 Problem
Korea Humanoid Robot Projects
 Korea Humanoid Robot Projects Jun Ho Oh HUBO Lab., KAIST KOREA Humanoid Projects(~2001) A few humanoid robot projects were existed. Most researches were on dynamic and kinematic simulations for walking
Korea Humanoid Robot Projects Jun Ho Oh HUBO Lab., KAIST KOREA Humanoid Projects(~2001) A few humanoid robot projects were existed. Most researches were on dynamic and kinematic simulations for walking
Design of a Compliant and Force Sensing Hand for a Humanoid Robot
 Design of a Compliant and Force Sensing Hand for a Humanoid Robot Aaron Edsinger-Gonzales Computer Science and Artificial Intelligence Laboratory, assachusetts Institute of Technology E-mail: edsinger@csail.mit.edu
Design of a Compliant and Force Sensing Hand for a Humanoid Robot Aaron Edsinger-Gonzales Computer Science and Artificial Intelligence Laboratory, assachusetts Institute of Technology E-mail: edsinger@csail.mit.edu
Milind R. Shinde #1, V. N. Bhaiswar *2, B. G. Achmare #3 1 Student of MTECH CAD/CAM, Department of Mechanical Engineering, GHRCE Nagpur, MH, India
 Design and simulation of robotic arm for loading and unloading of work piece on lathe machine by using workspace simulation software: A Review Milind R. Shinde #1, V. N. Bhaiswar *2, B. G. Achmare #3 1
Design and simulation of robotic arm for loading and unloading of work piece on lathe machine by using workspace simulation software: A Review Milind R. Shinde #1, V. N. Bhaiswar *2, B. G. Achmare #3 1
EXOBOTS AND ROBONAUTS: THE NEXT WAVE IN THE SEARCH FOR EXTRATERRESTRIALS
 EXOBOTS AND ROBONAUTS: THE NEXT WAVE IN THE SEARCH FOR EXTRATERRESTRIALS Presented By : B.GOPYA College: Usha Rama College of Engineering and technology. Branch & Year: ECE-III YEAR E-Mail: battegopya@gmail.com
EXOBOTS AND ROBONAUTS: THE NEXT WAVE IN THE SEARCH FOR EXTRATERRESTRIALS Presented By : B.GOPYA College: Usha Rama College of Engineering and technology. Branch & Year: ECE-III YEAR E-Mail: battegopya@gmail.com
Design and Analysis of Articulated Inspection Arm of Robot
 VOLUME 5 ISSUE 1 MAY 015 - ISSN: 349-9303 Design and Analysis of Articulated Inspection Arm of Robot K.Gunasekaran T.J Institute of Technology, Engineering Design (Mechanical Engineering), kgunasekaran.590@gmail.com
VOLUME 5 ISSUE 1 MAY 015 - ISSN: 349-9303 Design and Analysis of Articulated Inspection Arm of Robot K.Gunasekaran T.J Institute of Technology, Engineering Design (Mechanical Engineering), kgunasekaran.590@gmail.com
Space Radiation & Charging Cube Satellite (SPARCCS) Project
 Project") Space Radiation & Charging Cube Satellite (SPARCCS) Project Preliminary Design Review Nicholas Vuono, Project Manager Zacharias Macias, Electronics and Control Michael Buescher, Mission, Systems, and Test
Space Radiation & Charging Cube Satellite (SPARCCS) Project Preliminary Design Review Nicholas Vuono, Project Manager Zacharias Macias, Electronics and Control Michael Buescher, Mission, Systems, and Test
Flight Results from the nsight-1 QB50 CubeSat Mission
 Flight Results from the nsight-1 QB50 CubeSat Mission lvisagie@sun.ac.za Dr. Lourens Visagie Prof. Herman Steyn Stellenbosch University Hendrik Burger Dr. Francois Malan SCS-Space 4 th IAA Conference on
Flight Results from the nsight-1 QB50 CubeSat Mission lvisagie@sun.ac.za Dr. Lourens Visagie Prof. Herman Steyn Stellenbosch University Hendrik Burger Dr. Francois Malan SCS-Space 4 th IAA Conference on
Mission Applications for Space A&R - G.Visentin 1. Automation and Robotics Section (TEC-MMA)
") In the proceedings of the 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2004' ESTEC, Noordwijk, The Netherlands, November 2-4, 2004 Gianfranco Visentin Head, Automation
In the proceedings of the 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2004' ESTEC, Noordwijk, The Netherlands, November 2-4, 2004 Gianfranco Visentin Head, Automation
العطاء رقم )7106/67( الخاص بشراء أجهز لقسم الهندسة الكهربائية على حساب البحث العلمي
7106/67( الخاص بشراء أجهز لقسم الهندسة الكهربائية على حساب البحث العلمي") العطاء رقم )7106/67( الخاص بشراء أجهز لقسم الهندسة الكهربائية على حساب البحث العلمي رقم )7107/363( Page 1 of 6 1- Mechatronics Actuators Board & Mechatronics Systems Board with Education Laboratory for
العطاء رقم )7106/67( الخاص بشراء أجهز لقسم الهندسة الكهربائية على حساب البحث العلمي رقم )7107/363( Page 1 of 6 1- Mechatronics Actuators Board & Mechatronics Systems Board with Education Laboratory for
SEPTA 33 Solar Array Drive Assembly
 SEPTA 33 Solar Array Drive Assembly RUAG Space Schaffhauserstrasse 580 CH-8052 Zurich Switzerland Phone +41 44 306 2211 info.space@ruag.com www.ruag.com/space GENERAL DESCRIPTION The SEPTA 33 Solar Array
SEPTA 33 Solar Array Drive Assembly RUAG Space Schaffhauserstrasse 580 CH-8052 Zurich Switzerland Phone +41 44 306 2211 info.space@ruag.com www.ruag.com/space GENERAL DESCRIPTION The SEPTA 33 Solar Array
Elements of Haptic Interfaces
 Elements of Haptic Interfaces Katherine J. Kuchenbecker Department of Mechanical Engineering and Applied Mechanics University of Pennsylvania kuchenbe@seas.upenn.edu Course Notes for MEAM 625, University
Elements of Haptic Interfaces Katherine J. Kuchenbecker Department of Mechanical Engineering and Applied Mechanics University of Pennsylvania kuchenbe@seas.upenn.edu Course Notes for MEAM 625, University
Università di Roma La Sapienza. Medical Robotics. A Teleoperation System for Research in MIRS. Marilena Vendittelli
 Università di Roma La Sapienza Medical Robotics A Teleoperation System for Research in MIRS Marilena Vendittelli the DLR teleoperation system slave three versatile robots MIRO light-weight: weight < 10
Università di Roma La Sapienza Medical Robotics A Teleoperation System for Research in MIRS Marilena Vendittelli the DLR teleoperation system slave three versatile robots MIRO light-weight: weight < 10
EuLISA. Mechanisms. Final Internal Presentation ESTEC, 8th July Prepared by the ICPA / CDF* Team. (*) ESTEC Concurrent Design Facility
 ESTEC Concurrent Design Facility") EuLISA Mechanisms Final Internal Presentation ESTEC, 8th July 2011 Prepared by the ICPA / CDF* Team (*) ESTEC Concurrent Design Facility Mechanisms OPTION 1 Dual Soyuz Launch - 2 Mechanisms
EuLISA Mechanisms Final Internal Presentation ESTEC, 8th July 2011 Prepared by the ICPA / CDF* Team (*) ESTEC Concurrent Design Facility Mechanisms OPTION 1 Dual Soyuz Launch - 2 Mechanisms
How To Create The Right Collaborative System For Your Application. Corey Ryan Manager - Medical Robotics KUKA Robotics Corporation
 How To Create The Right Collaborative System For Your Application Corey Ryan Manager - Medical Robotics KUKA Robotics Corporation C Definitions Cobot: for this presentation a robot specifically designed
How To Create The Right Collaborative System For Your Application Corey Ryan Manager - Medical Robotics KUKA Robotics Corporation C Definitions Cobot: for this presentation a robot specifically designed
Testing a Robotic System for Collecting and Transferring Samples on Mars -
 Testing a Robotic System for Collecting and Transferring Samples on Mars - The Mars Surface Sample Transfer & Manipulation (MSSTM) Project Elie Allouis Elie.Allouis@astrium.eads.net Tony Jorden, Nildeep
Testing a Robotic System for Collecting and Transferring Samples on Mars - The Mars Surface Sample Transfer & Manipulation (MSSTM) Project Elie Allouis Elie.Allouis@astrium.eads.net Tony Jorden, Nildeep
World Automation Congress
 ISORA028 Main Menu World Automation Congress Tenth International Symposium on Robotics with Applications Seville, Spain June 28th-July 1st, 2004 Design And Experiences With DLR Hand II J. Butterfaß, M.
ISORA028 Main Menu World Automation Congress Tenth International Symposium on Robotics with Applications Seville, Spain June 28th-July 1st, 2004 Design And Experiences With DLR Hand II J. Butterfaß, M.
The Evolution of Nano-Satellite Proximity Operations In-Space Inspection Workshop 2017
 The Evolution of Nano-Satellite Proximity Operations 02-01-2017 In-Space Inspection Workshop 2017 Tyvak Introduction We develop miniaturized custom spacecraft, launch solutions, and aerospace technologies
The Evolution of Nano-Satellite Proximity Operations 02-01-2017 In-Space Inspection Workshop 2017 Tyvak Introduction We develop miniaturized custom spacecraft, launch solutions, and aerospace technologies
Attitude Determination and Control Specifications
 Attitude Determination and Control Specifications 1. SCOPE The attitude determination and control sub system will passively control the orientation of the two twin CubeSats. 1.1 General. This specification
Attitude Determination and Control Specifications 1. SCOPE The attitude determination and control sub system will passively control the orientation of the two twin CubeSats. 1.1 General. This specification
Design of a Remote-Cockpit for small Aerospace Vehicles
 Design of a Remote-Cockpit for small Aerospace Vehicles Muhammad Faisal, Atheel Redah, Sergio Montenegro Universität Würzburg Informatik VIII, Josef-Martin Weg 52, 97074 Würzburg, Germany Phone: +49 30
Design of a Remote-Cockpit for small Aerospace Vehicles Muhammad Faisal, Atheel Redah, Sergio Montenegro Universität Würzburg Informatik VIII, Josef-Martin Weg 52, 97074 Würzburg, Germany Phone: +49 30
ROKVISS Verification of Advanced Light Weight Robotic Joints and Tele-Presence Concepts for Future Space Missions
 In Proceedings of the 9th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2006' ESTEC, Noordwijk, The Netherlands, November 28-30, 2006 ABSTRACT ROKVISS Verification of Advanced
In Proceedings of the 9th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2006' ESTEC, Noordwijk, The Netherlands, November 28-30, 2006 ABSTRACT ROKVISS Verification of Advanced
Phone: , Fax: , Germany
 The TET-1 Satellite Bus A High Reliability Bus for Earth Observation, Scientific and Technology Verification Missions in LEO Pestana Conference Centre Funchal, Madeira - Portugal 31 May 4 June 2010 S.
The TET-1 Satellite Bus A High Reliability Bus for Earth Observation, Scientific and Technology Verification Missions in LEO Pestana Conference Centre Funchal, Madeira - Portugal 31 May 4 June 2010 S.
University of Kentucky Space Systems Laboratory. Jason Rexroat Space Systems Laboratory University of Kentucky
 University of Kentucky Space Systems Laboratory Jason Rexroat Space Systems Laboratory University of Kentucky September 15, 2012 Missions Overview CubeSat Capabilities Suborbital CubeSats ISS CubeSat-sized
University of Kentucky Space Systems Laboratory Jason Rexroat Space Systems Laboratory University of Kentucky September 15, 2012 Missions Overview CubeSat Capabilities Suborbital CubeSats ISS CubeSat-sized
Chapter 1 Introduction to Robotics
 Chapter 1 Introduction to Robotics PS: Most of the pages of this presentation were obtained and adapted from various sources in the internet. 1 I. Definition of Robotics Definition (Robot Institute of
Chapter 1 Introduction to Robotics PS: Most of the pages of this presentation were obtained and adapted from various sources in the internet. 1 I. Definition of Robotics Definition (Robot Institute of
Journal of Theoretical and Applied Mechanics, Sofia, 2014, vol. 44, No. 1, pp ROBONAUT 2: MISSION, TECHNOLOGIES, PERSPECTIVES
 Journal of Theoretical and Applied Mechanics, Sofia, 2014, vol. 44, No. 1, pp. 97 102 SCIENTIFIC LIFE DOI: 10.2478/jtam-2014-0006 ROBONAUT 2: MISSION, TECHNOLOGIES, PERSPECTIVES Galia V. Tzvetkova Institute
Journal of Theoretical and Applied Mechanics, Sofia, 2014, vol. 44, No. 1, pp. 97 102 SCIENTIFIC LIFE DOI: 10.2478/jtam-2014-0006 ROBONAUT 2: MISSION, TECHNOLOGIES, PERSPECTIVES Galia V. Tzvetkova Institute
Easy Robot Programming for Industrial Manipulators by Manual Volume Sweeping
 Easy Robot Programming for Industrial Manipulators by Manual Volume Sweeping *Yusuke MAEDA, Tatsuya USHIODA and Satoshi MAKITA (Yokohama National University) MAEDA Lab INTELLIGENT & INDUSTRIAL ROBOTICS
Easy Robot Programming for Industrial Manipulators by Manual Volume Sweeping *Yusuke MAEDA, Tatsuya USHIODA and Satoshi MAKITA (Yokohama National University) MAEDA Lab INTELLIGENT & INDUSTRIAL ROBOTICS
Autonomous Satellite Servicing Using the Orbital Express Demonstration Manipulator System
 Autonomous Satellite Servicing Using the Orbital Express Demonstration Manipulator System Andrew Ogilvie, Justin Allport, Michael Hannah, John Lymer MDA, 9445 Airport Road, Brampton, Ontario, Canada L6S
Autonomous Satellite Servicing Using the Orbital Express Demonstration Manipulator System Andrew Ogilvie, Justin Allport, Michael Hannah, John Lymer MDA, 9445 Airport Road, Brampton, Ontario, Canada L6S
A Feasibility Study of Time-Domain Passivity Approach for Bilateral Teleoperation of Mobile Manipulator
 International Conference on Control, Automation and Systems 2008 Oct. 14-17, 2008 in COEX, Seoul, Korea A Feasibility Study of Time-Domain Passivity Approach for Bilateral Teleoperation of Mobile Manipulator
International Conference on Control, Automation and Systems 2008 Oct. 14-17, 2008 in COEX, Seoul, Korea A Feasibility Study of Time-Domain Passivity Approach for Bilateral Teleoperation of Mobile Manipulator
Peter Berkelman. ACHI/DigitalWorld
 Magnetic Levitation Haptic Peter Berkelman ACHI/DigitalWorld February 25, 2013 Outline: Haptics - Force Feedback Sample devices: Phantoms, Novint Falcon, Force Dimension Inertia, friction, hysteresis/backlash
Magnetic Levitation Haptic Peter Berkelman ACHI/DigitalWorld February 25, 2013 Outline: Haptics - Force Feedback Sample devices: Phantoms, Novint Falcon, Force Dimension Inertia, friction, hysteresis/backlash
Five-fingered Robot Hand using Ultrasonic Motors and Elastic Elements *
 Proceedings of the 2005 IEEE International Conference on Robotics and Automation Barcelona, Spain, April 2005 Five-fingered Robot Hand using Ultrasonic Motors and Elastic Elements * Ikuo Yamano Department
Proceedings of the 2005 IEEE International Conference on Robotics and Automation Barcelona, Spain, April 2005 Five-fingered Robot Hand using Ultrasonic Motors and Elastic Elements * Ikuo Yamano Department
FIRST REAL-LIFE RESULTS OF NOVEL MICRO VIBRATION MEASUREMENT FACILITY
 FIRST REAL-LIFE RESULTS OF NOVEL MICRO VIBRATION MEASUREMENT FACILITY Stefan Wismer (1), René Messing (2), Mark Wagner (2) (1) RUAG Schweiz AG, RUAG Space, Schaffhauserstrasse 580, CH-8052 Zürich, stefan.wismer@ruag.com
FIRST REAL-LIFE RESULTS OF NOVEL MICRO VIBRATION MEASUREMENT FACILITY Stefan Wismer (1), René Messing (2), Mark Wagner (2) (1) RUAG Schweiz AG, RUAG Space, Schaffhauserstrasse 580, CH-8052 Zürich, stefan.wismer@ruag.com
IT-SPINS Ionospheric Imaging Mission
 IT-SPINS Ionospheric Imaging Mission Rick Doe, SRI Gary Bust, Romina Nikoukar, APL Dave Klumpar, Kevin Zack, Matt Handley, MSU 14 th Annual CubeSat Dveloper s Workshop 26 April 2017 IT-SPINS Ionosphere-Thermosphere
IT-SPINS Ionospheric Imaging Mission Rick Doe, SRI Gary Bust, Romina Nikoukar, APL Dave Klumpar, Kevin Zack, Matt Handley, MSU 14 th Annual CubeSat Dveloper s Workshop 26 April 2017 IT-SPINS Ionosphere-Thermosphere
Lecture 9: Teleoperation
 ME 327: Design and Control of Haptic Systems Autumn 2018 Lecture 9: Teleoperation Allison M. Okamura Stanford University teleoperation history and examples the genesis of teleoperation? a Polygraph is
ME 327: Design and Control of Haptic Systems Autumn 2018 Lecture 9: Teleoperation Allison M. Okamura Stanford University teleoperation history and examples the genesis of teleoperation? a Polygraph is
The RVS3000 rendezvous and docking sensor technology
 The RVS3000 rendezvous and docking sensor technology ESA Clean Space Industry Days, 23 25 Oct 2018 Hans K. Raue, Sales Director, Jena-Optronik Dr. Sebastian Dochow, Director LIDAR Products, Jena-Optronik
The RVS3000 rendezvous and docking sensor technology ESA Clean Space Industry Days, 23 25 Oct 2018 Hans K. Raue, Sales Director, Jena-Optronik Dr. Sebastian Dochow, Director LIDAR Products, Jena-Optronik