Group #17 Arian Garcia Javier Morales Tatsiana Smahliuk Christopher Vendette
|
|
|
- Howard Morrison
- 5 years ago
- Views:
Transcription

1 Group #17 Arian Garcia Javier Morales Tatsiana Smahliuk Christopher Vendette Electrical Engineering Electrical Engineering Electrical Engineering Electrical Engineering
2 Contents Motivation Project Description EMG Analog-to-Digital Conversion Motors LCD Display Microcontroller / Modes of Operation Power System Administrative Content
3 Motivation 1 2 million individuals living with congenital/non-congenital amputations in the United States. Approximately 185,000 amputations occur in the United States each year. Main causes: vascular disease (54%); trauma (45%) cancer (less than 2%). The total number of veterans with major limb amputations as of June 1, 2015, is 1,645. Access to advanced arms limited: High cost barrier of bionics and powered prosthetics
4 Motivation 1 Cost Barrier Simple myoelectric prosthetic arm: Partial loss of a hand - $18,703 Up to the middle of the lower arm - $20,329; Up to the middle of the upper arm - $59,664 Up to the shoulder - $61,655. Advanced myoelectric prosthetic arm: $100,000 Health insurance covers around 50% of doctor s visits and cost of prosthetics. Source: Department of Veterans Affairs study.
5 Project Initiative 1 To provide an affordable advanced powered prosthetic solution with multiple gesture/grip functionality. Limbitless Solutions (current) arm: 1 Motor, 1 Grip Better response time Improved Accessibility Features Increase of intuitive function


6 Gripping Methods 2 Open/Close Grip One-Finger Pinch Grip Point Grip Thumbs Up
7 Requirements: Requirements 2 To be usable for both transhumeral (aboveelbow) and transradial (below-elbow) amputees. Calibration methods to customize voltage level. Light enough to be usable in everyday environment by adult men/women. Use non-tactile method to actuate the arm (EMG)
8 Specifications 2 Specification # of Grips 4 Signal Delay Weight Sustainable Load Battery Life Battery Type Open/Close speed Value 0.5 second Under 3 lbs. 1 lb Hrs. (Normal Use) Rechargeable 3.33 ms/degree

9 Simple Logic Diagram 2

10 Hardware Diagram 2

11 EMG Sensor 3 The Electromyography Sensor can be used to measure the electrical activity of muscles. EMG signal is in the order of up to 3,000 micro volts and can be easily manipulated which makes it one of the most popular sensors used as a control signal in prosthetic devices.

12 MyoWare EMG Sensor 3 The MyoWare EMG sensor is a muscle sensor offered by Advancer Technologies. This sensor performs by allowing the electrodes to be attached to the EMG board itself, with the ground breaking out into its own separate cable. Sensor Layout
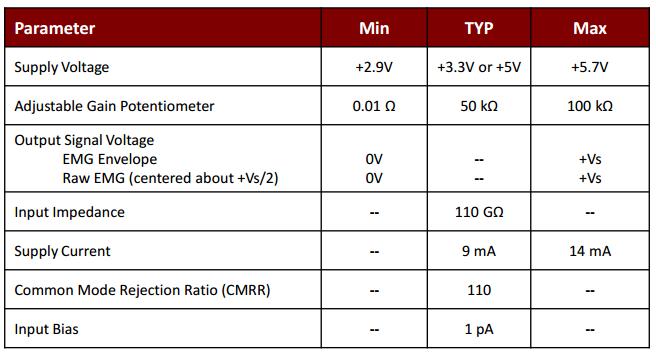
13 Electrical Specifications 3

14 EMG Signal Processing 3 Stages: Electrodes used with MyoWare sensor are standard disposable pre-gelled electrodes that are attached to the built-in electrode muscle snaps. They are easy to use and allow better contact with skin surface.
15 1 st Stage Amplification 3 1st Amplification stage requires amplifier with high input impedance and very low output impedance. Instrumentation amplifier has to be used due to its excellent rejection of high frequency common-mode signals, low input bias current and, high speed. Performance remains excellent with power supplies ranging from ±2.25V to ±18V.
16 EMG Filtering 3 EMG filtering circuitry has high-pass and low-pass filters. The noises and the EMG signals are simultaneously amplified and this is not favorable so filtering has to be used after each amplification stage. HPF LPF

17 2 nd Stage Amplification 3 2nd Amplification can be achieved with the help of a non-inverting amplifier. TL084 with four built-in operational amplifiers was used to prototype this stage. It features high input impedance, low-input bias and offset currents, low power consumption, and output short-circuit protection.
18 Schematic Layout 3
19 Analog-to-Digital Converter 34 Using on-board SAR analog-to-digital converter to convert EMG signal for usage of threshold value. Analog Supply Voltage 0 to 3.6V 12-bit ADC (2^12 = 4096 steps) 0.88 mv Resolution
20 Motor Considerations Type: Continuous DC, Stepper, Servo Servo includes control feedback for position 2. Size: Tradeoffs between strength of servo and physical size. 3. Grip Strength Amount of Torque Tradeoff between torque and current draw 4. Current Draw Maximum stall current equal to or under 0.5A
 Torque: 4.8V: 55.0 oz-in (4.0 kg-cm) 6.0V: 68.5 oz-in (4.80 kg-cm) Speed: 4.8V: 0.14 sec/60 6.0V: 0.11 sec/60 Speed: 4.8V: 0.15 sec/60 6.0V: 0.12 sec/60 Weight: 0.")
 Width: 0.47 in (11.9 mm) Height: 1.18 in (30.0 mm) Rotation: Dual Bearings Rotation: Dual Bearings Gear Type: Metal Gear Type: Metal")
21 Servo Selection 5 TowerPro MG930 Airtronics Modulation Digital Modulation Digital Torque: 4.8V: 50.0 oz-in (3.60 kg-cm) 6.0V: 62.5 oz-in (4.50 kg-cm) Torque: 4.8V: 55.0 oz-in (4.0 kg-cm) 6.0V: 68.5 oz-in (4.80 kg-cm) Speed: 4.8V: 0.14 sec/60 6.0V: 0.11 sec/60 Speed: 4.8V: 0.15 sec/60 6.0V: 0.12 sec/60 Weight: 0.92 oz (26.0 g) Weight: 0.8 oz (23.0 g) Dimensions: Length: 1.43 in (36.2 mm) Width: 0.60 in (15.2 mm) Height: 1.13 in (28.7 mm) Dimensions: Length: 1.06 in (26.7 mm) Width: 0.47 in (11.9 mm) Height: 1.18 in (30.0 mm) Rotation: Dual Bearings Rotation: Dual Bearings Gear Type: Metal Gear Type: Metal
22 Pulse Width Modulation (PWM) 5 50 Hz servo motor, period of 20ms 0.5ms to 1.5ms pulse width turns the servo from 0 to 180 degrees. Duty Cycle = [(1/180)*degrees + 0.5ms]/20ms

23 Display inch screen of 96 x 96 pixels 2. Ultra low power consumption 3. Display is controlled serially using SPI 4. Two capacitive touch sliders (three-element sliders) Vendor Price Texas Instruments $20 USD
24 Display 6 1. Calibration The calibration menu will be used to recalibrate and adjust the thresholds. 2. Gesture Menu The gesture menu will consist of a list of the gestures named. The current gesture selected will be highlighted.
25 Microcontroller Considerations 7 1. Amount of timers: The timers are most importantly used to perform pulse width modulation(pwm). PWM is used to control the angle of the servo motors. 2. Serial Peripheral Interface(SPI): SPI is an interface bus commonly used to send data between microcontrollers and small peripherals. SPI is needed to control the display serially
26 Microcontroller Considerations 7 3. Type/Amount of Memory Adding gestures/display requires more code than initial Limbitless arm. Ferroelectric Random Access Memory(FRAM) - retains data without a power source, has the speed of SRAM, and the security of flash. 4. Power/Cost To stay within spec inexpensive low power MCU is needed
27 Microcontroller Considerations 7 5. Analog-to-Digital Conversion Most microcontrollers support ADC. ADC is used to convert user input to digital means the MCU can understand. 6. Amount of Pins Enough pins are needed to implement the project. Through the beginning phases of research number of pins was not known.

28 MSP430FR Features 64KB FRAM 2KB SRAM SPI 3x UART I2C 40 Input/Output Vendor Price Texas Instruments $14.5 USD
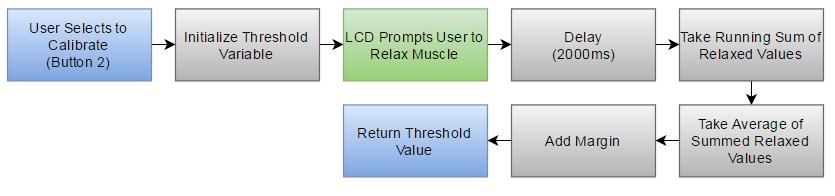
29 Calibration Mode 7

30 Switch Gesture Mode 7 Gesture Description Number Full Grip 0 Pinch 1 Pointer 2 Thumbs Up 3

31 Operating Mode 7


32 Power Supply Considerations 58 Battery: 2S1P Tenergy Li-Ion Battery Rechargeable Small Form Factor Two cell with 7.4 nominal voltage (vs. Single-Cell 3.7) Allows for bucking as opposed to boosting to supply voltages Included PCB Overcharge and Over-discharge Protection Charging: bq24103 Li-Ion Charger Allows for 2-Cell balanced charging Allows for 10-16V AC adapter charging Special application to dual charge with 5V USB Price: $4.50
33 Power Supply Considerations 8 2. Supply Voltage / Current Requirements: Part Supply Voltage Requirement (V) Motor # V 0.5A Motor # V 0.5A Motor # V 0.5A Motor # V 0.5A Current Draw - Maximum (A) LCD Display +3.3V Varies with Application EMG Sensor +3.3V 15 ma Microcontroller V 3 ma
34 Power Supply Considerations 8 TPS54332 Buck Converter V Input Voltage Range Adjustable Output Voltage (Allows for 5V Rail) Available output current up to 3.5A Smallest footprint option for this application Price: $2.04 LP38690 LDO Linear Regulator V Input Voltage Range Small footprint (linear regulator) Price $0.63

35 Power Supply Block Diagram 8

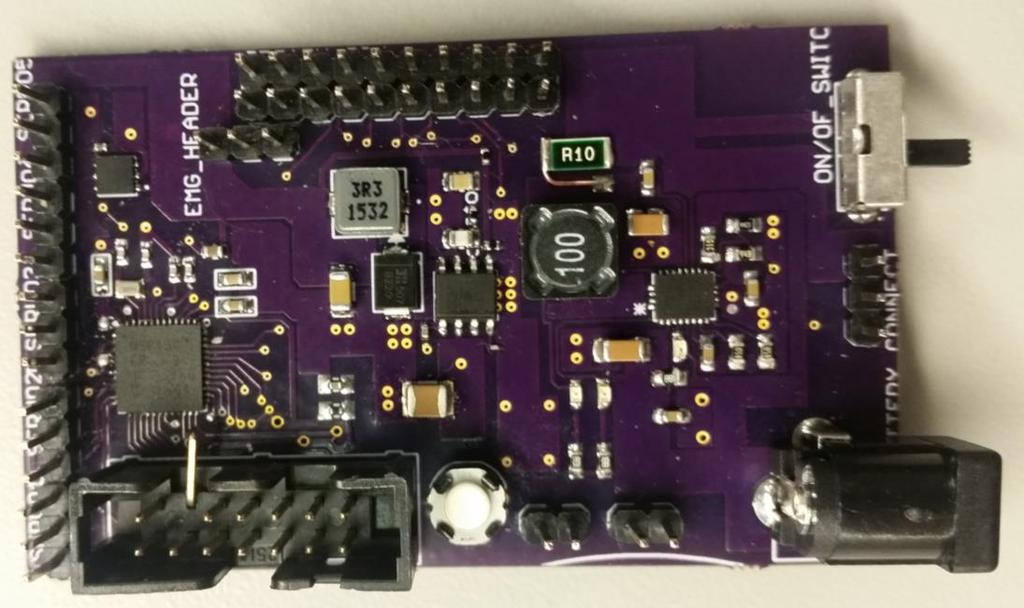
36 PCB Design 8
37 Administrative Content 98
38 Work Distribution 9 The project was divided into 4 major hardware component subsystems: Power, Sensor, MCU, and Servos. Even though, each group member was assigned a specific subsystem, collaboration is absolutely necessary for successful completion Section Christopher Javier Tatiana Arian Administrative / Technical Writing S P Power System Design P S EMG Implementation S P Servo Implementation S P Calibration/LCD (Programming) PWM / Gestures (Programming) S P P S PCB Design / Board Layout P S S Part Ordering / Budget Management S P P Primary S - Secondary
39 Estimated Cost 9 Component Quantity Price ($) Microcontroller Servos Battery Charging EMG Sensor EMG Prototype 1 (Box) LCD Display PCB Components PCB Manufacturing TOTAL
40 Difficulties: 9 Power: - Battery Charging. - Protection circuit if high capacity RC Li-Ion battery is used. EMG sensor: - Can be damaged by electrostatic discharge; ESD damage can range from subtle performance degradation to complete device failure. Servos: - May not have enough torque to overcome the load. As a result different motors will have to be considered. - Size of Servos to fit in the arm.
41 Questions?
EMG Sensor Shirt. Senior Project Written Hardware Description April 28, 2015 ETEC 474. By: Dylan Kleist Joshua Goertz
 EMG Sensor Shirt Senior Project Written Hardware Description April 28, 2015 ETEC 474 By: Dylan Kleist Joshua Goertz Table of Contents Introduction... 3 User Interface Board... 3 Bluetooth... 3 Keypad...
EMG Sensor Shirt Senior Project Written Hardware Description April 28, 2015 ETEC 474 By: Dylan Kleist Joshua Goertz Table of Contents Introduction... 3 User Interface Board... 3 Bluetooth... 3 Keypad...
Multiplex Bionic. Senior Design I Report. Group #17. Arian Garcia. Javier Morales. Tatsiana Smahliuk. Christopher Vendette
 Multiplex Bionic Senior Design I Report Group #17 Arian Garcia Javier Morales Tatsiana Smahliuk Christopher Vendette Table of Contents 1 Executive Summary... 1 2 Project Description... 2 2.1 Motivation...
Multiplex Bionic Senior Design I Report Group #17 Arian Garcia Javier Morales Tatsiana Smahliuk Christopher Vendette Table of Contents 1 Executive Summary... 1 2 Project Description... 2 2.1 Motivation...
Multiplex Bionic. Senior Design I Report. Group #17. Arian Garcia. Javier Morales. Tatsiana Smahliuk. Christopher Vendette
 Multiplex Bionic Senior Design I Report Group #17 Arian Garcia Javier Morales Tatsiana Smahliuk Christopher Vendette Table of Contents 1 Executive Summary... 1 2 Project Description... 2 2.1 Motivation...
Multiplex Bionic Senior Design I Report Group #17 Arian Garcia Javier Morales Tatsiana Smahliuk Christopher Vendette Table of Contents 1 Executive Summary... 1 2 Project Description... 2 2.1 Motivation...
3-lead Muscle / Electromyography Sensor for Microcontroller Applications
 3-lead Muscle / Electromyography Sensor for Microcontroller Applications MyoWare Muscle Sensor (AT-04-001) DATASHEET FEATURES NEW - Wearable Design NEW - Single Supply +3.1V to +5.9V Polarity reversal
3-lead Muscle / Electromyography Sensor for Microcontroller Applications MyoWare Muscle Sensor (AT-04-001) DATASHEET FEATURES NEW - Wearable Design NEW - Single Supply +3.1V to +5.9V Polarity reversal
International Journal of Advanced Research in Electrical, Electronics and Instrumentation Engineering. (An ISO 3297: 2007 Certified Organization)
") International Journal of Advanced Research in Electrical, Electronics Device Control Using Intelligent Switch Sreenivas Rao MV *, Basavanna M Associate Professor, Department of Instrumentation Technology,
International Journal of Advanced Research in Electrical, Electronics Device Control Using Intelligent Switch Sreenivas Rao MV *, Basavanna M Associate Professor, Department of Instrumentation Technology,
Hardware Platforms and Sensors
 Hardware Platforms and Sensors Tom Spink Including material adapted from Bjoern Franke and Michael O Boyle Hardware Platform A hardware platform describes the physical components that go to make up a particular
Hardware Platforms and Sensors Tom Spink Including material adapted from Bjoern Franke and Michael O Boyle Hardware Platform A hardware platform describes the physical components that go to make up a particular
ELG3336 Design of Mechatronics System
 ELG3336 Design of Mechatronics System Elements of a Data Acquisition System 2 Analog Signal Data Acquisition Hardware Your Signal Data Acquisition DAQ Device System Computer Cable Terminal Block Data Acquisition
ELG3336 Design of Mechatronics System Elements of a Data Acquisition System 2 Analog Signal Data Acquisition Hardware Your Signal Data Acquisition DAQ Device System Computer Cable Terminal Block Data Acquisition
Group 14 T.U.B.A-The Ultimate Bionic Arm EEL 4194: Senior Design I Final Documentation
 T.U.B.A- EEL 4194: Senior Design I Final Documentation Carolus Andrews Blake Steiner Raymond Brunkow Wesley Mullins Biographies Carolus Andrews is a former professional chef turned electrical engineer.
T.U.B.A- EEL 4194: Senior Design I Final Documentation Carolus Andrews Blake Steiner Raymond Brunkow Wesley Mullins Biographies Carolus Andrews is a former professional chef turned electrical engineer.
L E C T U R E R, E L E C T R I C A L A N D M I C R O E L E C T R O N I C E N G I N E E R I N G
 P R O F. S L A C K L E C T U R E R, E L E C T R I C A L A N D M I C R O E L E C T R O N I C E N G I N E E R I N G G B S E E E @ R I T. E D U B L D I N G 9, O F F I C E 0 9-3 1 8 9 ( 5 8 5 ) 4 7 5-5 1 0
P R O F. S L A C K L E C T U R E R, E L E C T R I C A L A N D M I C R O E L E C T R O N I C E N G I N E E R I N G G B S E E E @ R I T. E D U B L D I N G 9, O F F I C E 0 9-3 1 8 9 ( 5 8 5 ) 4 7 5-5 1 0
EMG click PID: MIKROE-2621
 EMG click PID: MIKROE-2621 EMG click measures the electrical activity produced by the skeletal muscles. It carries MCP609 operational amplifier and MAX6106 micropower voltage reference. EMG click is designed
EMG click PID: MIKROE-2621 EMG click measures the electrical activity produced by the skeletal muscles. It carries MCP609 operational amplifier and MAX6106 micropower voltage reference. EMG click is designed
Introduction. Theory of Operation
 Mohan Rokkam Page 1 12/15/2004 Introduction The goal of our project is to design and build an automated shopping cart that follows a shopper around. Ultrasonic waves are used due to the slower speed of
Mohan Rokkam Page 1 12/15/2004 Introduction The goal of our project is to design and build an automated shopping cart that follows a shopper around. Ultrasonic waves are used due to the slower speed of
Mind Games. Daniel Warner (EE) John Parker (EE) Justin Dwyer (EE) Duy Nguyen (EE) G38
 John Parker (EE) Justin Dwyer (EE) Duy Nguyen (EE) G38") Mind Games Daniel Warner (EE) John Parker (EE) Justin Dwyer (EE) Duy Nguyen (EE) G38 Goals & Objectives Basic Overview The goal of this project is to control multiple applications through nontraditional
Mind Games Daniel Warner (EE) John Parker (EE) Justin Dwyer (EE) Duy Nguyen (EE) G38 Goals & Objectives Basic Overview The goal of this project is to control multiple applications through nontraditional
EEL5666C IMDL Spring 2006 Student: Andrew Joseph. *Alarm-o-bot*
 EEL5666C IMDL Spring 2006 Student: Andrew Joseph *Alarm-o-bot* TAs: Adam Barnett, Sara Keen Instructor: A.A. Arroyo Final Report April 25, 2006 Table of Contents Abstract 3 Executive Summary 3 Introduction
EEL5666C IMDL Spring 2006 Student: Andrew Joseph *Alarm-o-bot* TAs: Adam Barnett, Sara Keen Instructor: A.A. Arroyo Final Report April 25, 2006 Table of Contents Abstract 3 Executive Summary 3 Introduction
ECE 511: MICROPROCESSORS
 ECE 511: MICROPROCESSORS A project report on SNIFFING DOG Under the guidance of Prof. Jens Peter Kaps By, Preethi Santhanam (G00767634) Ranjit Mandavalli (G00819673) Shaswath Raghavan (G00776950) Swathi
ECE 511: MICROPROCESSORS A project report on SNIFFING DOG Under the guidance of Prof. Jens Peter Kaps By, Preethi Santhanam (G00767634) Ranjit Mandavalli (G00819673) Shaswath Raghavan (G00776950) Swathi
Trans-African Hydro-Meteorological Observatory
 Trans-African Hydro-Meteorological Observatory Sensor Design Competition A design by: 1. Kolyanga Emmanuel Email: emmakoly@gmail.com 2. Wogisha Benjamin Email: wogisha@gmail.com Executive Summary Proposal
Trans-African Hydro-Meteorological Observatory Sensor Design Competition A design by: 1. Kolyanga Emmanuel Email: emmakoly@gmail.com 2. Wogisha Benjamin Email: wogisha@gmail.com Executive Summary Proposal
IL8190 TECHNICAL DATA PRECISION AIR - CORE TACH / SPEEDO DRIVER WITH RETURN TO ZERO DESCRIPTION FEATURES
 TECHNICAL DATA PRECISION AIR - CORE TACH / SPEEDO DRIVER WITH RETURN TO ZERO IL8190 DESCRIPTION The IL8190 is specifically designed for use with air core meter movements. The IC provides all the functions
TECHNICAL DATA PRECISION AIR - CORE TACH / SPEEDO DRIVER WITH RETURN TO ZERO IL8190 DESCRIPTION The IL8190 is specifically designed for use with air core meter movements. The IC provides all the functions
MAXREFDES73#: WEARABLE, GALVANIC SKIN RESPONSE SYSTEM
 MAXREFDES73#: WEARABLE, GALVANIC SKIN RESPONSE SYSTEM MAXREFDES39# System Board Introduction GSR measurement detects human skin impedance under different situations. A variety of events affect the skin
MAXREFDES73#: WEARABLE, GALVANIC SKIN RESPONSE SYSTEM MAXREFDES39# System Board Introduction GSR measurement detects human skin impedance under different situations. A variety of events affect the skin
LINE MAZE SOLVING ROBOT
 LINE MAZE SOLVING ROBOT EEE 456 REPORT OF INTRODUCTION TO ROBOTICS PORJECT PROJECT OWNER: HAKAN UÇAROĞLU 2000502055 INSTRUCTOR: AHMET ÖZKURT 1 CONTENTS I- Abstract II- Sensor Circuit III- Compare Circuit
LINE MAZE SOLVING ROBOT EEE 456 REPORT OF INTRODUCTION TO ROBOTICS PORJECT PROJECT OWNER: HAKAN UÇAROĞLU 2000502055 INSTRUCTOR: AHMET ÖZKURT 1 CONTENTS I- Abstract II- Sensor Circuit III- Compare Circuit
GSM BASED PATIENT MONITORING SYSTEM
 GSM BASED PATIENT MONITORING SYSTEM ABSTRACT This project deals with the monitoring of the patient parameters such as humidity, temperature and heartbeat. Here we have designed a microcontroller based
GSM BASED PATIENT MONITORING SYSTEM ABSTRACT This project deals with the monitoring of the patient parameters such as humidity, temperature and heartbeat. Here we have designed a microcontroller based
EEL 4924 Electrical Engineering Design (Senior Design) Preliminary Design Report. 2 February Project Name: LoL Assistant
 Preliminary Design Report. 2 February Project Name: LoL Assistant") EEL 4924 Electrical Engineering Design (Senior Design) Preliminary Design Report 2 February 2012 Project Name: Team Members: Name: Kyle Lewis ktlewis02@gmail.com 941-962-5449 Abstract: The goal of this
EEL 4924 Electrical Engineering Design (Senior Design) Preliminary Design Report 2 February 2012 Project Name: Team Members: Name: Kyle Lewis ktlewis02@gmail.com 941-962-5449 Abstract: The goal of this
Data Logger Subsystems Mark Buccini February 2012
 Data Logger Subsystems Mark Buccini February 2012 Full Disclosure Mark E. Buccini ULP Staff at TI 25+ years strategy, applications, marketing, sales, and management experience Lead MSP430 worldwide introduction
Data Logger Subsystems Mark Buccini February 2012 Full Disclosure Mark E. Buccini ULP Staff at TI 25+ years strategy, applications, marketing, sales, and management experience Lead MSP430 worldwide introduction
International Journal of Advance Engineering and Research Development
 Scientific Journal of Impact Factor (SJIF): 4.14 International Journal of Advance Engineering and Research Development Volume 3, Issue 2, February -2016 e-issn (O): 2348-4470 p-issn (P): 2348-6406 SIMULATION
Scientific Journal of Impact Factor (SJIF): 4.14 International Journal of Advance Engineering and Research Development Volume 3, Issue 2, February -2016 e-issn (O): 2348-4470 p-issn (P): 2348-6406 SIMULATION
DESIGN OF AN EMBEDDED BATTERY MANAGEMENT SYSTEM WITH PASSIVE BALANCING
 Proceedings of the 6th European Embedded Design in Education and Research, 2014 DESIGN OF AN EMBEDDED BATTERY MANAGEMENT SYSTEM WITH PASSIVE BALANCING Kristaps Vitols Institute of Industrial Electronics
Proceedings of the 6th European Embedded Design in Education and Research, 2014 DESIGN OF AN EMBEDDED BATTERY MANAGEMENT SYSTEM WITH PASSIVE BALANCING Kristaps Vitols Institute of Industrial Electronics
Design of a Bionic Hand Using Non Invasive Interface
 Design of a Bionic Hand Using Non Invasive Interface By Evan McNabb Electrical and Biomedical Engineering Design Project (4BI6) Department of Electrical and Computer Engineering McMaster University Hamilton,
Design of a Bionic Hand Using Non Invasive Interface By Evan McNabb Electrical and Biomedical Engineering Design Project (4BI6) Department of Electrical and Computer Engineering McMaster University Hamilton,
ECE 477 Digital Systems Senior Design Project Rev 8/09. Homework 5: Theory of Operation and Hardware Design Narrative
 ECE 477 Digital Systems Senior Design Project Rev 8/09 Homework 5: Theory of Operation and Hardware Design Narrative Team Code Name: _ATV Group No. 3 Team Member Completing This Homework: Sebastian Hening
ECE 477 Digital Systems Senior Design Project Rev 8/09 Homework 5: Theory of Operation and Hardware Design Narrative Team Code Name: _ATV Group No. 3 Team Member Completing This Homework: Sebastian Hening
A New Low-Cost Bionic Hand
 Paper ID #15623 A New Low-Cost Bionic Hand Mr. TJ Brown, Middle Tennessee State University TJ Brown earned his Bachelor of Science in 2015 at Middle Tennessee State University where he studied Electro-Mechanical
Paper ID #15623 A New Low-Cost Bionic Hand Mr. TJ Brown, Middle Tennessee State University TJ Brown earned his Bachelor of Science in 2015 at Middle Tennessee State University where he studied Electro-Mechanical
Electric Bike BLDC Hub Motor Control Using the Z8FMC1600 MCU
 Application Note Electric Bike BLDC Hub Motor Control Using the Z8FMC1600 MCU AN026002-0608 Abstract This application note describes a controller for a 200 W, 24 V Brushless DC (BLDC) motor used to power
Application Note Electric Bike BLDC Hub Motor Control Using the Z8FMC1600 MCU AN026002-0608 Abstract This application note describes a controller for a 200 W, 24 V Brushless DC (BLDC) motor used to power
EITF40 Digital and Analogue Projects - GNSS Tracker 2.4
 EITF40 Digital and Analogue Projects - GNSS Tracker 2.4 Magnus Wasting 26 February 2018 Abstract In this report a mobile global navigation satellite system with SMS and alarm functionality is constructed.
EITF40 Digital and Analogue Projects - GNSS Tracker 2.4 Magnus Wasting 26 February 2018 Abstract In this report a mobile global navigation satellite system with SMS and alarm functionality is constructed.
MAE3. Absolute Magnetic Kit Encoder Page 1 of 8. Description. Mechanical Drawing. Features
 Description MAE3 Page 1 of 8 The MAE3 is an absolute magnetic kit encoder that provides shaft position information over 360 of rotation with no stops or gaps. This magnetic encoder is designed to easily
Description MAE3 Page 1 of 8 The MAE3 is an absolute magnetic kit encoder that provides shaft position information over 360 of rotation with no stops or gaps. This magnetic encoder is designed to easily
Team 1 XTreme Spice Dispenser
 NYU Poly Team 1 XTreme Spice Dispenser ME 5643 Professor Kapila Report Written by: Akim Faisal Andrew Cave Sam Sangankar Contents Abstract... 2 Introduction... 3 Dispenser Components... 4 Safety Guidelines...
NYU Poly Team 1 XTreme Spice Dispenser ME 5643 Professor Kapila Report Written by: Akim Faisal Andrew Cave Sam Sangankar Contents Abstract... 2 Introduction... 3 Dispenser Components... 4 Safety Guidelines...
Weekly Update Michael Jorgensen Week of 2/25/11 3/3/11
 Weekly Update Michael Jorgensen Week of 2/25/11 3/3/11 I tested the circuit with my left masseter and temporalis muscles. I obtained a clean signal as shown in FIG. 1 (L masseter). It is evident that the
Weekly Update Michael Jorgensen Week of 2/25/11 3/3/11 I tested the circuit with my left masseter and temporalis muscles. I obtained a clean signal as shown in FIG. 1 (L masseter). It is evident that the
Bridge Measurement Systems
 Section 5 Outline Introduction to Bridge Sensors Circuits for Bridge Sensors A real design: the ADS1232REF The ADS1232REF Firmware This presentation gives an overview of data acquisition for bridge sensors.
Section 5 Outline Introduction to Bridge Sensors Circuits for Bridge Sensors A real design: the ADS1232REF The ADS1232REF Firmware This presentation gives an overview of data acquisition for bridge sensors.
Study of M.A.R.S. (Multifunctional Aero-drone for Remote Surveillance)
") Study of M.A.R.S. (Multifunctional Aero-drone for Remote Surveillance) Supriya Bhuran 1, Rohit V. Agrawal 2, Kiran D. Bombe 2, Somiran T. Karmakar 2, Ninad V. Bapat 2 1 Assistant Professor, Dept. Instrumentation,
Study of M.A.R.S. (Multifunctional Aero-drone for Remote Surveillance) Supriya Bhuran 1, Rohit V. Agrawal 2, Kiran D. Bombe 2, Somiran T. Karmakar 2, Ninad V. Bapat 2 1 Assistant Professor, Dept. Instrumentation,
Super Low Noise Preamplifier
 PR-E 3 Super Low Noise Preamplifier - Datasheet - Features: Outstanding Low Noise (< 1nV/ Hz, 15fA/ Hz, 245 e - rms) Small Size Dual and Single Channel Use Room temperature and cooled operation down to
PR-E 3 Super Low Noise Preamplifier - Datasheet - Features: Outstanding Low Noise (< 1nV/ Hz, 15fA/ Hz, 245 e - rms) Small Size Dual and Single Channel Use Room temperature and cooled operation down to
MA3. Miniature Absolute Magnetic Shaft Encoder Page 1 of 8. Description. Order Using #MA3 starting at $36.00 per unit. Features
 Page 1 of 8 Description The MA3 is a miniature rotary absolute shaft encoder that reports the shaft position over 360 with no stops or gaps. The MA3 is available with an analog or a pulse width modulated
Page 1 of 8 Description The MA3 is a miniature rotary absolute shaft encoder that reports the shaft position over 360 with no stops or gaps. The MA3 is available with an analog or a pulse width modulated
Understanding RC Servos and DC Motors
 Understanding RC Servos and DC Motors What You ll Learn How an RC servo and DC motor operate Understand the electrical and mechanical details How to interpret datasheet specifications and properly apply
Understanding RC Servos and DC Motors What You ll Learn How an RC servo and DC motor operate Understand the electrical and mechanical details How to interpret datasheet specifications and properly apply
Plant Automated Sustainable System P.A.S.S. Spring 2014; Group 31 Sponsored by: Duke Energy
 Plant Automated Sustainable System P.A.S.S. Spring 2014; Group 31 Sponsored by: Duke Energy Devin Erickson Kelley Ice Jason Fitzgerald Vincent Kondracki Objectives Portability Renewable Adaptable and Robust
Plant Automated Sustainable System P.A.S.S. Spring 2014; Group 31 Sponsored by: Duke Energy Devin Erickson Kelley Ice Jason Fitzgerald Vincent Kondracki Objectives Portability Renewable Adaptable and Robust
DA 30 High Torque Technical Specification
 1/17 DA 30 High Torque DA 30-HT-30-5848 2/17 Content 1. General Description... 3 2. Operating Data... 4 3. Performance... 5 4. Materials and Protective Features... 6 5. Dimensions... 6 5.1. Installation
1/17 DA 30 High Torque DA 30-HT-30-5848 2/17 Content 1. General Description... 3 2. Operating Data... 4 3. Performance... 5 4. Materials and Protective Features... 6 5. Dimensions... 6 5.1. Installation
Autonomous Optical Guidance System. Group 2 Brandon Staton John Ciambriello John Fridenmaker Ryan Shoaf
 Autonomous Optical Guidance System Group 2 Brandon Staton John Ciambriello John Fridenmaker Ryan Shoaf Project Goals and Objectives The desire to create a system which will autonomously guide a model airplane
Autonomous Optical Guidance System Group 2 Brandon Staton John Ciambriello John Fridenmaker Ryan Shoaf Project Goals and Objectives The desire to create a system which will autonomously guide a model airplane
ECE 445 Fall 2017 Project Proposal. Recovery-Monitoring Knee Brace
 ECE 445 Fall 2017 Project Proposal Recovery-Monitoring Knee Brace Team #40 Locker D10 Members: Dennis Ryu [dryu3], Dong Hyun Lee [dlee134], Jong Yoon Lee [jlee642] TA: Dongwei Shi [dshi9] 18 Sept 2017
ECE 445 Fall 2017 Project Proposal Recovery-Monitoring Knee Brace Team #40 Locker D10 Members: Dennis Ryu [dryu3], Dong Hyun Lee [dlee134], Jong Yoon Lee [jlee642] TA: Dongwei Shi [dshi9] 18 Sept 2017
Gamma Spectrometer Initial Project Proposal
 Gamma Spectrometer Initial Project Proposal Group 9 Aman Kataria Johnny Klarenbeek Dean Sullivan David Valentine Introduction There are currently two main types of gamma radiation detectors used for gamma
Gamma Spectrometer Initial Project Proposal Group 9 Aman Kataria Johnny Klarenbeek Dean Sullivan David Valentine Introduction There are currently two main types of gamma radiation detectors used for gamma
ANALOG SERVOS Hitec leads the way with quality reliable servo product to fit any hobby application. Our full line of 32 analog and 16 digital servos a
 ANALOG SERVOS HS-635HB HIGH TORQUE HS-645MG ULTRA TORQUE 133.31 oz.in(9.6kg.cm) 0.20 sec/60 83.32 oz.in(6kg.cm) 0.15 sec/60 1.59 x 0.77 x 1.52in 40.6 x 19.8 x 38.8mm 1.76oz 50g 1.59 x 0.77 x 1.48in 40.6
ANALOG SERVOS HS-635HB HIGH TORQUE HS-645MG ULTRA TORQUE 133.31 oz.in(9.6kg.cm) 0.20 sec/60 83.32 oz.in(6kg.cm) 0.15 sec/60 1.59 x 0.77 x 1.52in 40.6 x 19.8 x 38.8mm 1.76oz 50g 1.59 x 0.77 x 1.48in 40.6
The Development and Application of High Compression Ratio Methanol Engine ECU
 National Conference on Information Technology and Computer Science (CITCS 2012) The Development and Application of High Compression Ratio Methanol Engine ECU Hong Bin, 15922184696 hongbinlqyun@163.com
National Conference on Information Technology and Computer Science (CITCS 2012) The Development and Application of High Compression Ratio Methanol Engine ECU Hong Bin, 15922184696 hongbinlqyun@163.com
Introduction to the Arduino Kit
 1 Introduction to the Arduino Kit Introduction Arduino is an open source microcontroller platform used for sensing both digital and analog input signals and for sending digital and analog output signals
1 Introduction to the Arduino Kit Introduction Arduino is an open source microcontroller platform used for sensing both digital and analog input signals and for sending digital and analog output signals
Design and Implementation of AT Mega 328 microcontroller based firing control for a tri-phase thyristor control rectifier
 Design and Implementation of AT Mega 328 microcontroller based firing control for a tri-phase thyristor control rectifier 1 Mr. Gangul M.R PG Student WIT, Solapur 2 Mr. G.P Jain Assistant Professor WIT,
Design and Implementation of AT Mega 328 microcontroller based firing control for a tri-phase thyristor control rectifier 1 Mr. Gangul M.R PG Student WIT, Solapur 2 Mr. G.P Jain Assistant Professor WIT,
MXD7210GL/HL/ML/NL. Low Cost, Low Noise ±10 g Dual Axis Accelerometer with Digital Outputs
 FEATURES Low cost Resolution better than 1milli-g at 1Hz Dual axis accelerometer fabricated on a monolithic CMOS IC On chip mixed signal processing No moving parts; No loose particle issues >50,000 g shock
FEATURES Low cost Resolution better than 1milli-g at 1Hz Dual axis accelerometer fabricated on a monolithic CMOS IC On chip mixed signal processing No moving parts; No loose particle issues >50,000 g shock
Audio in ecall and Cluster. Clancy Soehren MSA Applications FAE Summit 2016
 Audio in ecall and Cluster Clancy Soehren MSA Applications FAE Summit 2016 1 Agenda Audio Architecture Audio Quality Diagnostics and Protection Efficiency EMI/EMC 2 Audio Architecture 3 Cluster Mid-Range
Audio in ecall and Cluster Clancy Soehren MSA Applications FAE Summit 2016 1 Agenda Audio Architecture Audio Quality Diagnostics and Protection Efficiency EMI/EMC 2 Audio Architecture 3 Cluster Mid-Range
Mechatronics Engineering and Automation Faculty of Engineering, Ain Shams University MCT-151, Spring 2015 Lab-4: Electric Actuators
 Mechatronics Engineering and Automation Faculty of Engineering, Ain Shams University MCT-151, Spring 2015 Lab-4: Electric Actuators Ahmed Okasha, Assistant Lecturer okasha1st@gmail.com Objective Have a
Mechatronics Engineering and Automation Faculty of Engineering, Ain Shams University MCT-151, Spring 2015 Lab-4: Electric Actuators Ahmed Okasha, Assistant Lecturer okasha1st@gmail.com Objective Have a
Programming and Interfacing
 AtmelAVR Microcontroller Primer: Programming and Interfacing Second Edition f^r**t>*-**n*c contents Preface xv AtmelAVRArchitecture Overview 1 1.1 ATmegal64 Architecture Overview 1 1.1.1 Reduced Instruction
AtmelAVR Microcontroller Primer: Programming and Interfacing Second Edition f^r**t>*-**n*c contents Preface xv AtmelAVRArchitecture Overview 1 1.1 ATmegal64 Architecture Overview 1 1.1.1 Reduced Instruction
DA DA 26 Technical Specification. Page 1/27. Volz Servos GmbH & Co. KG servos.com
 1/27 DA 26 DA 26 30 5024 2/27 Content 1. General Description... 3 2. Operating Data... 4 3. Performance... 5 4. Command Signal... 6 4.1. PWM Command Interface... 6 4.2. RS 485 Command Signal... 6 4.3.
1/27 DA 26 DA 26 30 5024 2/27 Content 1. General Description... 3 2. Operating Data... 4 3. Performance... 5 4. Command Signal... 6 4.1. PWM Command Interface... 6 4.2. RS 485 Command Signal... 6 4.3.
R30D RVDTs DC-Operated Rotary Variable Differential Transformers
 R30D RVDTs DC-Operated Rotary Variable Differential Transformers RVDTs incorporate a proprietary noncontact design that dramatically improves long term reliability when compared to other traditional rotary
R30D RVDTs DC-Operated Rotary Variable Differential Transformers RVDTs incorporate a proprietary noncontact design that dramatically improves long term reliability when compared to other traditional rotary
MA3. Miniature Absolute Magnetic Shaft Encoder Page 1 of 8. Description. Mechanical Drawing. Features
 Description Page 1 of 8 The MA3 is a miniature rotary absolute shaft encoder that reports the shaft position over 360 with no stops or gaps. The MA3 is available with an analog or a pulse width modulated
Description Page 1 of 8 The MA3 is a miniature rotary absolute shaft encoder that reports the shaft position over 360 with no stops or gaps. The MA3 is available with an analog or a pulse width modulated
MXD2125J/K. Ultra Low Cost, ±2.0 g Dual Axis Accelerometer with Digital Outputs
 Ultra Low Cost, ±2.0 g Dual Axis Accelerometer with Digital Outputs MXD2125J/K FEATURES RoHS Compliant Dual axis accelerometer Monolithic CMOS construction On-chip mixed mode signal processing Resolution
Ultra Low Cost, ±2.0 g Dual Axis Accelerometer with Digital Outputs MXD2125J/K FEATURES RoHS Compliant Dual axis accelerometer Monolithic CMOS construction On-chip mixed mode signal processing Resolution
MAE3. Absolute Magnetic Kit Encoder Page 1 of 9. Description. Features EH-1009.pdf
 Page 1 of 9 Description The is an absolute magnetic kit encoder that provides shaft position information over 360 of rotation with no stops or gaps. This magnetic encoder is designed to easily mount to,
Page 1 of 9 Description The is an absolute magnetic kit encoder that provides shaft position information over 360 of rotation with no stops or gaps. This magnetic encoder is designed to easily mount to,
AUTOMATIC CLOTH FOLDING MACHINE
 AUTOMATIC CLOTH FOLDING MACHINE. By Xudong Li Anran Su Suicheng Zhan Final Report for ECE 445, Senior Design, Spring 2017 TA: Yuchen He 3 May 2017 Project No. 43 Abstract The purpose of this project is
AUTOMATIC CLOTH FOLDING MACHINE. By Xudong Li Anran Su Suicheng Zhan Final Report for ECE 445, Senior Design, Spring 2017 TA: Yuchen He 3 May 2017 Project No. 43 Abstract The purpose of this project is
GESTUR. Sensing & Feedback Glove for interfacing with Virtual Reality
 GESTUR Sensing & Feedback Glove for interfacing with Virtual Reality Initial Design Review ECE 189A, Fall 2016 University of California, Santa Barbara History & Introduction - Oculus and Vive are great
GESTUR Sensing & Feedback Glove for interfacing with Virtual Reality Initial Design Review ECE 189A, Fall 2016 University of California, Santa Barbara History & Introduction - Oculus and Vive are great
MIT400/2 CAT IV Insulation testers
 MIT400/2 CAT IV Insulation testers MIT400/2 CAT IV Insulation testers Designed for Electrical and Industrial testing Insulation testing up to 1000 V and 200 GΩ range Stabilised insulation test voltage
MIT400/2 CAT IV Insulation testers MIT400/2 CAT IV Insulation testers Designed for Electrical and Industrial testing Insulation testing up to 1000 V and 200 GΩ range Stabilised insulation test voltage
Sensor Interfacing and Operational Amplifiers Lab 3
 Name Lab Day Lab Time Sensor Interfacing and Operational Amplifiers Lab 3 Introduction: In this lab you will design and build a circuit that will convert the temperature indicated by a thermistor s resistance
Name Lab Day Lab Time Sensor Interfacing and Operational Amplifiers Lab 3 Introduction: In this lab you will design and build a circuit that will convert the temperature indicated by a thermistor s resistance
Lab Exercise 9: Stepper and Servo Motors
 ME 3200 Mechatronics Laboratory Lab Exercise 9: Stepper and Servo Motors Introduction In this laboratory exercise, you will explore some of the properties of stepper and servomotors. These actuators are
ME 3200 Mechatronics Laboratory Lab Exercise 9: Stepper and Servo Motors Introduction In this laboratory exercise, you will explore some of the properties of stepper and servomotors. These actuators are
MIT400/2. CAT IV Insulation testers MIT430/2: CAT IV Insulation testers
 MIT400/2 Designed for electrical and industrial testing Insulation testing up to 1000 V and 200 GΩ range Stabilized insulation test voltage (New) Single range, faster continuity testing from 0.01 Ω to
MIT400/2 Designed for electrical and industrial testing Insulation testing up to 1000 V and 200 GΩ range Stabilized insulation test voltage (New) Single range, faster continuity testing from 0.01 Ω to
What? nanowatt? Acquiring sensor data in wireless products with nanowatts of power consumption
 11001101011010 10101010101010 10101010111010 01010011101101 010101 What? nanowatt? Acquiring sensor data in wireless products with nanowatts of power consumption Peggy Liska Texas Instruments Product Marketing
11001101011010 10101010101010 10101010111010 01010011101101 010101 What? nanowatt? Acquiring sensor data in wireless products with nanowatts of power consumption Peggy Liska Texas Instruments Product Marketing
PLC-K506 Series FEATURES DESCRIPTION FEATURES
 FEATURES Two High Speed Counters Two Pulse Train Outputs Two Pulse Width Modulation Outputs Inputs 10 Outputs 1 RS232 Port 2 RS485 Ports Supports Modbus RTU Protocol Communicate With Up to 32 Devices DESCRIPTION
FEATURES Two High Speed Counters Two Pulse Train Outputs Two Pulse Width Modulation Outputs Inputs 10 Outputs 1 RS232 Port 2 RS485 Ports Supports Modbus RTU Protocol Communicate With Up to 32 Devices DESCRIPTION
eguitar G R O U P 7 B R A N D O N B E R K C O M P U T E R E N G I N E E R W I L L I A M R E M I N G T O N E L E C T R I C A L E N G I N E E R
 eguitar G R O U P 7 B R A N D O N B E R K C O M P U T E R E N G I N E E R W I L L I A M R E M I N G T O N E L E C T R I C A L E N G I N E E R E R I C S O R O K O W S K Y C O M P U T E R E N G I N E E R
eguitar G R O U P 7 B R A N D O N B E R K C O M P U T E R E N G I N E E R W I L L I A M R E M I N G T O N E L E C T R I C A L E N G I N E E R E R I C S O R O K O W S K Y C O M P U T E R E N G I N E E R
6. HARDWARE PROTOTYPE AND EXPERIMENTAL RESULTS
 6. HARDWARE PROTOTYPE AND EXPERIMENTAL RESULTS Laboratory based hardware prototype is developed for the z-source inverter based conversion set up in line with control system designed, simulated and discussed
6. HARDWARE PROTOTYPE AND EXPERIMENTAL RESULTS Laboratory based hardware prototype is developed for the z-source inverter based conversion set up in line with control system designed, simulated and discussed
The Torxis Linear Servo meets the following environmental conditions:
 Page: 1 1. PRODUCT DESCRIPTION The Torxis Linear Servo is the second generation of linear servos provided by GearWurx. This product features internal position sensing, and closed loop position control.
Page: 1 1. PRODUCT DESCRIPTION The Torxis Linear Servo is the second generation of linear servos provided by GearWurx. This product features internal position sensing, and closed loop position control.
GSM based Patient monitoring system
 For more Project details visit: http://www.projectsof8051.com/patient-monitoring-through-gsm-modem/ Code Project Title 1615 GSM based Patient monitoring system Synopsis for GSM based Patient monitoring
For more Project details visit: http://www.projectsof8051.com/patient-monitoring-through-gsm-modem/ Code Project Title 1615 GSM based Patient monitoring system Synopsis for GSM based Patient monitoring
العطاء رقم )7106/67( الخاص بشراء أجهز لقسم الهندسة الكهربائية على حساب البحث العلمي
7106/67( الخاص بشراء أجهز لقسم الهندسة الكهربائية على حساب البحث العلمي") العطاء رقم )7106/67( الخاص بشراء أجهز لقسم الهندسة الكهربائية على حساب البحث العلمي رقم )7107/363( Page 1 of 6 1- Mechatronics Actuators Board & Mechatronics Systems Board with Education Laboratory for
العطاء رقم )7106/67( الخاص بشراء أجهز لقسم الهندسة الكهربائية على حساب البحث العلمي رقم )7107/363( Page 1 of 6 1- Mechatronics Actuators Board & Mechatronics Systems Board with Education Laboratory for
Building a Microcontroller based potentiostat: A Inexpensive and. versatile platform for teaching electrochemistry and instrumentation.
 Supporting Information for Building a Microcontroller based potentiostat: A Inexpensive and versatile platform for teaching electrochemistry and instrumentation. Gabriel N. Meloni* Instituto de Química
Supporting Information for Building a Microcontroller based potentiostat: A Inexpensive and versatile platform for teaching electrochemistry and instrumentation. Gabriel N. Meloni* Instituto de Química
Lock Cracker S. Lust, E. Skjel, R. LeBlanc, C. Kim
 Lock Cracker S. Lust, E. Skjel, R. LeBlanc, C. Kim Abstract - This project utilized Eleven Engineering s XInC2 development board to control several peripheral devices to open a standard 40 digit combination
Lock Cracker S. Lust, E. Skjel, R. LeBlanc, C. Kim Abstract - This project utilized Eleven Engineering s XInC2 development board to control several peripheral devices to open a standard 40 digit combination
TRANSDUCER INTERFACE APPLICATIONS
 TRANSDUCER INTERFACE APPLICATIONS Instrumentation amplifiers have long been used as preamplifiers in transducer applications. High quality transducers typically provide a highly linear output, but at a
TRANSDUCER INTERFACE APPLICATIONS Instrumentation amplifiers have long been used as preamplifiers in transducer applications. High quality transducers typically provide a highly linear output, but at a
Design and Implementation of an Exoskeleton Arm Joint
 Design and Implementation of an Exoskeleton Arm Joint Prepared for: ECE 4600 Prepared by: Alex Reimer Colin Peterson Logan Froese Patrick Pagé Advisor: Robert McLeod, Ph.D, P. Eng Department of Electrical
Design and Implementation of an Exoskeleton Arm Joint Prepared for: ECE 4600 Prepared by: Alex Reimer Colin Peterson Logan Froese Patrick Pagé Advisor: Robert McLeod, Ph.D, P. Eng Department of Electrical
32-bit ARM Cortex-M0, Cortex-M3 and Cortex-M4F microcontrollers
 -bit ARM Cortex-, Cortex- and Cortex-MF microcontrollers Energy, gas, water and smart metering Alarm and security systems Health and fitness applications Industrial and home automation Smart accessories
-bit ARM Cortex-, Cortex- and Cortex-MF microcontrollers Energy, gas, water and smart metering Alarm and security systems Health and fitness applications Industrial and home automation Smart accessories
Haptic Feedback Technology
 Haptic Feedback Technology ECE480: Design Team 4 Application Note Michael Greene Abstract: With the daily interactions between humans and their surrounding technology growing exponentially, the development
Haptic Feedback Technology ECE480: Design Team 4 Application Note Michael Greene Abstract: With the daily interactions between humans and their surrounding technology growing exponentially, the development
STM32 microcontroller core ECG acquisition Conditioning System. LIU Jia-ming, LI Zhi
 International Conference on Computer and Information Technology Application (ICCITA 2016) STM32 microcontroller core ECG acquisition Conditioning System LIU Jia-ming, LI Zhi College of electronic information,
International Conference on Computer and Information Technology Application (ICCITA 2016) STM32 microcontroller core ECG acquisition Conditioning System LIU Jia-ming, LI Zhi College of electronic information,
KNC-PLC-K506 Series FEATURES DESCRIPTION FEATURES
 FEATURES Two High Speed Counters Two Pulse Train Outputs Two Pulse Width Modulation Outputs Inputs 10 Outputs 1 RS232 Port 2 RS485 Ports Supports Modbus RTU Protocol Communicate with up to 32 devices DESCRIPTION
FEATURES Two High Speed Counters Two Pulse Train Outputs Two Pulse Width Modulation Outputs Inputs 10 Outputs 1 RS232 Port 2 RS485 Ports Supports Modbus RTU Protocol Communicate with up to 32 devices DESCRIPTION
Embedded Robotics. Software Development & Education Center
 Software Development & Education Center Embedded Robotics Robotics Development with ARM µp INTRODUCTION TO ROBOTICS Types of robots Legged robots Mobile robots Autonomous robots Manual robots Robotic arm
Software Development & Education Center Embedded Robotics Robotics Development with ARM µp INTRODUCTION TO ROBOTICS Types of robots Legged robots Mobile robots Autonomous robots Manual robots Robotic arm
T6+ Analog I/O Section. Installation booklet for part numbers: 5/4-80A-115 5/4-90A-115 5/4-80A /4-90A-1224
 T and T+ are trade names of Trol Systems Inc. TSI reserves the right to make changes to the information contained in this manual without notice. publication /4A115MAN- rev:1 2001 TSI All rights reserved
T and T+ are trade names of Trol Systems Inc. TSI reserves the right to make changes to the information contained in this manual without notice. publication /4A115MAN- rev:1 2001 TSI All rights reserved
Rotary Servo Actuator
 Rotary Servo Actuator TYPICAL APPLICATIONS Unmanned air vehicles - tactical, medium long endurance and MALE / HALE vehicles - Control surfaces requiring servo actuation Target drones - surface control,
Rotary Servo Actuator TYPICAL APPLICATIONS Unmanned air vehicles - tactical, medium long endurance and MALE / HALE vehicles - Control surfaces requiring servo actuation Target drones - surface control,
QUICK START GUIDE FOR DEMONSTRATION CIRCUIT BIT DIFFERENTIAL INPUT DELTA SIGMA ADC LTC DESCRIPTION
 LTC2433-1 DESCRIPTION Demonstration circuit 745 features the LTC2433-1, a 16-bit high performance Σ analog-to-digital converter (ADC). The LTC2433-1 features 0.12 LSB linearity, 0.16 LSB full-scale accuracy,
LTC2433-1 DESCRIPTION Demonstration circuit 745 features the LTC2433-1, a 16-bit high performance Σ analog-to-digital converter (ADC). The LTC2433-1 features 0.12 LSB linearity, 0.16 LSB full-scale accuracy,
SGM9111 8MHz Rail-to-Rail Composite Video Driver with 6dB Gain
 PRODUCT DESCRIPTION The SGM9111 is single rail-to-rail 5-pole output reconstruction filter with a -3dB bandwidth of 8MHz and a slew rate of 3.8V/µs. Operating from single supplies ranging from 3.V to 5.5V
PRODUCT DESCRIPTION The SGM9111 is single rail-to-rail 5-pole output reconstruction filter with a -3dB bandwidth of 8MHz and a slew rate of 3.8V/µs. Operating from single supplies ranging from 3.V to 5.5V
Cortex-M3 based Prepaid System with Electricity Theft Control
 Research Inventy: International Journal of Engineering And Science Vol.6, Issue 4 (April 2016), PP -139-146 Issn (e): 2278-4721, Issn (p):2319-6483, www.researchinventy.com Cortex-M3 based Prepaid System
Research Inventy: International Journal of Engineering And Science Vol.6, Issue 4 (April 2016), PP -139-146 Issn (e): 2278-4721, Issn (p):2319-6483, www.researchinventy.com Cortex-M3 based Prepaid System
Low Cost, General Purpose High Speed JFET Amplifier AD825
 a FEATURES High Speed 41 MHz, 3 db Bandwidth 125 V/ s Slew Rate 8 ns Settling Time Input Bias Current of 2 pa and Noise Current of 1 fa/ Hz Input Voltage Noise of 12 nv/ Hz Fully Specified Power Supplies:
a FEATURES High Speed 41 MHz, 3 db Bandwidth 125 V/ s Slew Rate 8 ns Settling Time Input Bias Current of 2 pa and Noise Current of 1 fa/ Hz Input Voltage Noise of 12 nv/ Hz Fully Specified Power Supplies:
Advanced Regulating Pulse Width Modulators
 Advanced Regulating Pulse Width Modulators FEATURES Complete PWM Power Control Circuitry Uncommitted Outputs for Single-ended or Push-pull Applications Low Standby Current 8mA Typical Interchangeable with
Advanced Regulating Pulse Width Modulators FEATURES Complete PWM Power Control Circuitry Uncommitted Outputs for Single-ended or Push-pull Applications Low Standby Current 8mA Typical Interchangeable with
Programming PIC Microchips
 Programming PIC Microchips Fís Foghlaim Forbairt Programming the PIC microcontroller using Genie Programming Editor Workshop provided & facilitated by the PDST www.t4.ie Page 1 DC motor control: DC motors
Programming PIC Microchips Fís Foghlaim Forbairt Programming the PIC microcontroller using Genie Programming Editor Workshop provided & facilitated by the PDST www.t4.ie Page 1 DC motor control: DC motors
MXD6235Q. Ultra High Performance ±1g Dual Axis Accelerometer with Digital Outputs FEATURES
 Ultra High Performance ±1g Dual Axis Accelerometer with Digital Outputs MXD6235Q FEATURES Ultra Low Noise 0.13 mg/ Hz typical RoHS compliant Ultra Low Offset Drift 0.1 mg/ C typical Resolution better than
Ultra High Performance ±1g Dual Axis Accelerometer with Digital Outputs MXD6235Q FEATURES Ultra Low Noise 0.13 mg/ Hz typical RoHS compliant Ultra Low Offset Drift 0.1 mg/ C typical Resolution better than
Wireless Master-Slave Embedded Controller for a Teleoperated Anthropomorphic Robotic Arm with Gripping Force Sensing
 Wireless Master-Slave Embedded Controller for a Teleoperated Anthropomorphic Robotic Arm with Gripping Force Sensing Presented by: Benjamin B. Rhoades ECGR 6185 Adv. Embedded Systems January 16 th 2013
Wireless Master-Slave Embedded Controller for a Teleoperated Anthropomorphic Robotic Arm with Gripping Force Sensing Presented by: Benjamin B. Rhoades ECGR 6185 Adv. Embedded Systems January 16 th 2013
Development of a MATLAB Data Acquisition and Control Toolbox for BASIC Stamp Microcontrollers
 Chapter 4 Development of a MATLAB Data Acquisition and Control Toolbox for BASIC Stamp Microcontrollers 4.1. Introduction Data acquisition and control boards, also known as DAC boards, are used in virtually
Chapter 4 Development of a MATLAB Data Acquisition and Control Toolbox for BASIC Stamp Microcontrollers 4.1. Introduction Data acquisition and control boards, also known as DAC boards, are used in virtually
LM150/LM350A/LM350 3-Amp Adjustable Regulators
 LM150/LM350A/LM350 3-Amp Adjustable Regulators General Description The LM150 series of adjustable 3-terminal positive voltage regulators is capable of supplying in excess of 3A over a 1.2V to 33V output
LM150/LM350A/LM350 3-Amp Adjustable Regulators General Description The LM150 series of adjustable 3-terminal positive voltage regulators is capable of supplying in excess of 3A over a 1.2V to 33V output
Low Cost 100 g Single Axis Accelerometer with Analog Output ADXL190*
 a FEATURES imems Single Chip IC Accelerometer 40 Milli-g Resolution Low Power ma 400 Hz Bandwidth +5.0 V Single Supply Operation 000 g Shock Survival APPLICATIONS Shock and Vibration Measurement Machine
a FEATURES imems Single Chip IC Accelerometer 40 Milli-g Resolution Low Power ma 400 Hz Bandwidth +5.0 V Single Supply Operation 000 g Shock Survival APPLICATIONS Shock and Vibration Measurement Machine
SGM9116 Triple, 35MHz, 6th Order HDTV Video Filter Driver
 PRODUCT DESCRIPTION The SGM911 is a video buffer which integrates triple Gain rail-to-rail output driver and triple th output reconstruction filter, it has 5MHz - bandwidth and 159V/µs slew rate. SGM911
PRODUCT DESCRIPTION The SGM911 is a video buffer which integrates triple Gain rail-to-rail output driver and triple th output reconstruction filter, it has 5MHz - bandwidth and 159V/µs slew rate. SGM911
Emoto-bot Demonstration Control System
 Emoto-bot Demonstration Control System I am building a demonstration control system for VEX robotics that creates a human-machine interface for an assistive or companion robotic device. My control system
Emoto-bot Demonstration Control System I am building a demonstration control system for VEX robotics that creates a human-machine interface for an assistive or companion robotic device. My control system
LM3647 Universal Battery Charger for Li-Ion, Ni-MH and Ni-Cd Batteries
 LM3647 Universal Battery Charger for Li-Ion, Ni-MH and Ni-Cd Batteries 1.0 General Description The LM3647 is a charge controller for Lithium-Ion (Li-Ion), Nickel-Metal Hydride (Ni-MH) and Nickel-Cadmium
LM3647 Universal Battery Charger for Li-Ion, Ni-MH and Ni-Cd Batteries 1.0 General Description The LM3647 is a charge controller for Lithium-Ion (Li-Ion), Nickel-Metal Hydride (Ni-MH) and Nickel-Cadmium
Biometric Data Collection Device for User Research
 Biometric Data Collection Device for User Research Design Team Daniel Dewey, Dillon Roberts, Connie Sundjojo, Ian Theilacker, Alex Gilbert Design Advisor Prof. Mark Sivak Abstract Quantitative video game
Biometric Data Collection Device for User Research Design Team Daniel Dewey, Dillon Roberts, Connie Sundjojo, Ian Theilacker, Alex Gilbert Design Advisor Prof. Mark Sivak Abstract Quantitative video game
Object Detection for Collision Avoidance in ITS
 Available online www.ejaet.com European Journal of Advances in Engineering and Technology, 2016, 3(5): 29-35 Research Article ISSN: 2394-658X Object Detection for Collision Avoidance in ITS Rupojyoti Kar
Available online www.ejaet.com European Journal of Advances in Engineering and Technology, 2016, 3(5): 29-35 Research Article ISSN: 2394-658X Object Detection for Collision Avoidance in ITS Rupojyoti Kar
Low Cost Motor Control Family
 Low Cost Motor Control Family 2011 Microchip Technology Incorporated. All Rights Reserved. Comparator with blanking and filtering Slide 1 Welcome to the Low Cost Motor Control Family web seminar. My Name
Low Cost Motor Control Family 2011 Microchip Technology Incorporated. All Rights Reserved. Comparator with blanking and filtering Slide 1 Welcome to the Low Cost Motor Control Family web seminar. My Name
SGM Channel PWM Dimming Charge Pump White LED Driver
 GENERAL DESCRIPTION The SGM3145 is a high performance white LED driver. It integrates current sources and automatic mode selection charge pump. The part maintains the high efficiency by utilizing a 1 /1.5
GENERAL DESCRIPTION The SGM3145 is a high performance white LED driver. It integrates current sources and automatic mode selection charge pump. The part maintains the high efficiency by utilizing a 1 /1.5
AP CANmotion. Evaluation Platform with BLDC Motor featuring XC886CM Flash Microcontroller Version 2007/10. Microcontrollers
 Application Note, V1.0, April 2007 AP08060 CANmotion Evaluation Platform with BLDC Motor featuring XC886CM Flash Microcontroller Version 2007/10 Microcontrollers Edition 2007-04 Published by Infineon Technologies
Application Note, V1.0, April 2007 AP08060 CANmotion Evaluation Platform with BLDC Motor featuring XC886CM Flash Microcontroller Version 2007/10 Microcontrollers Edition 2007-04 Published by Infineon Technologies
Motor Drive Business Unit Gem Li Marketing Manager
 Motor Drive Business Unit Gem Li Marketing Manager H-Bridge: The Heart of the Driver VM High Side Gate Driver M High Side Gate Driver Low Side Gate Driver Low Side Gate Driver Critical Specs / Care abouts:
Motor Drive Business Unit Gem Li Marketing Manager H-Bridge: The Heart of the Driver VM High Side Gate Driver M High Side Gate Driver Low Side Gate Driver Low Side Gate Driver Critical Specs / Care abouts:
RT9085A. 1A, 5.5V, Ultra Low Dropout Linear Regulator. Features. General Description. Pin Configuration. Applications. Marking Information
 RT9085A 1A, 5.5V, Ultra Low Dropout Linear Regulator General Description The RT9085A is a high performance positive voltage regulator with separated bias voltage (V ), designed for applications requiring
RT9085A 1A, 5.5V, Ultra Low Dropout Linear Regulator General Description The RT9085A is a high performance positive voltage regulator with separated bias voltage (V ), designed for applications requiring
AN4995 Application note
 Application note Using an electromyogram technique to detect muscle activity Sylvain Colliard-Piraud Introduction Electromyography (EMG) is a medical technique to evaluate and record the electrical activity
Application note Using an electromyogram technique to detect muscle activity Sylvain Colliard-Piraud Introduction Electromyography (EMG) is a medical technique to evaluate and record the electrical activity