Hopper Spacecraft Simulator. Billy Hau and Brian Wisniewski
|
|
|
- Miranda Robbins
- 6 years ago
- Views:
Transcription

1 Hopper Spacecraft Simulator Billy Hau and Brian Wisniewski

2 Agenda Introduction Flight Dynamics Hardware Design Avionics Control System Future Works
3 Introduction
")
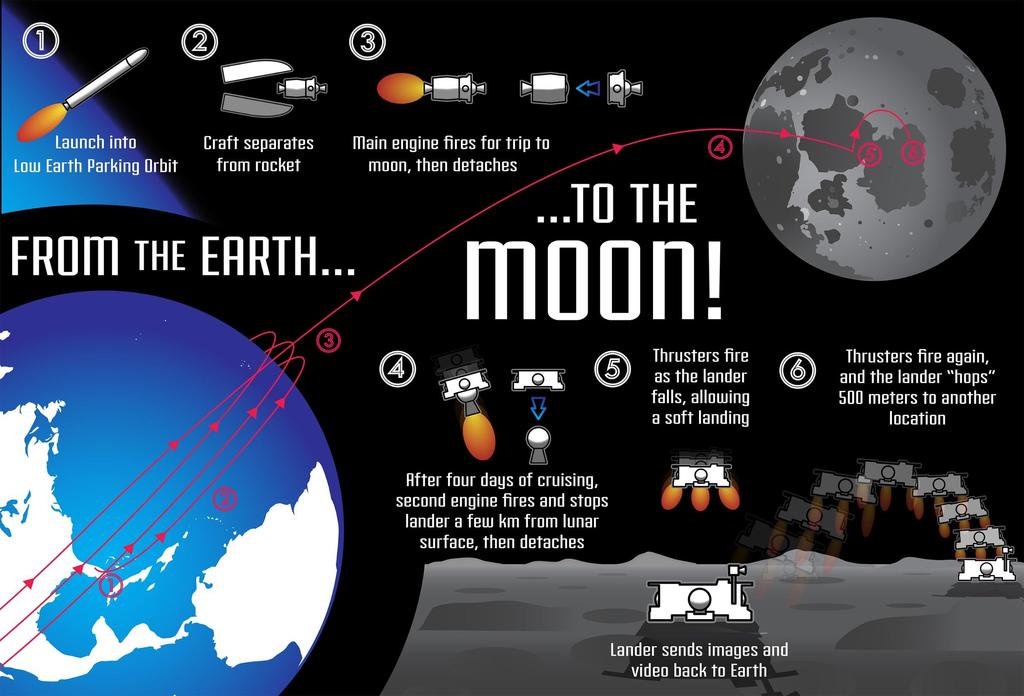
4 Mission Overview Collaboration with Penn State University on mission to compete in the Google Lunar XPRIZE competition Lehigh University focus on development of the Guidance, Navigation & Controls (GNC) system
5

6 Earth-Based Hopper Spacecraft Simulator Multirotor Flying Platform Similar Flight Dynamics Thrust Control via Pulse Width Modulation Simple Implementation of Avionics Rapid Development and Test Cycle Relatively Inexpensive and Safe
7 Flight Dynamics


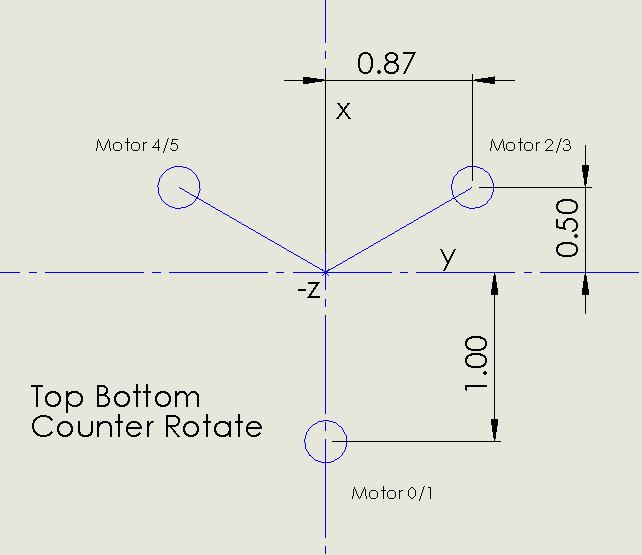
8 Kinetics & Dynamics: FBD Conceptual Diagram Quadrotor Dynamics
9 Kinetics & Dynamics: Frames of Reference Frames of Reference: Inertial Frame: Earth-fixed coordinate system Vehicle Frame: Inertial frame located at the COG of the Quadrotor. Body Frame: Located at the COG of the Quadrotor, with its axis fixed on the arms of the Quadrotor
10 Kinetics & Dynamics: Equations of Motion
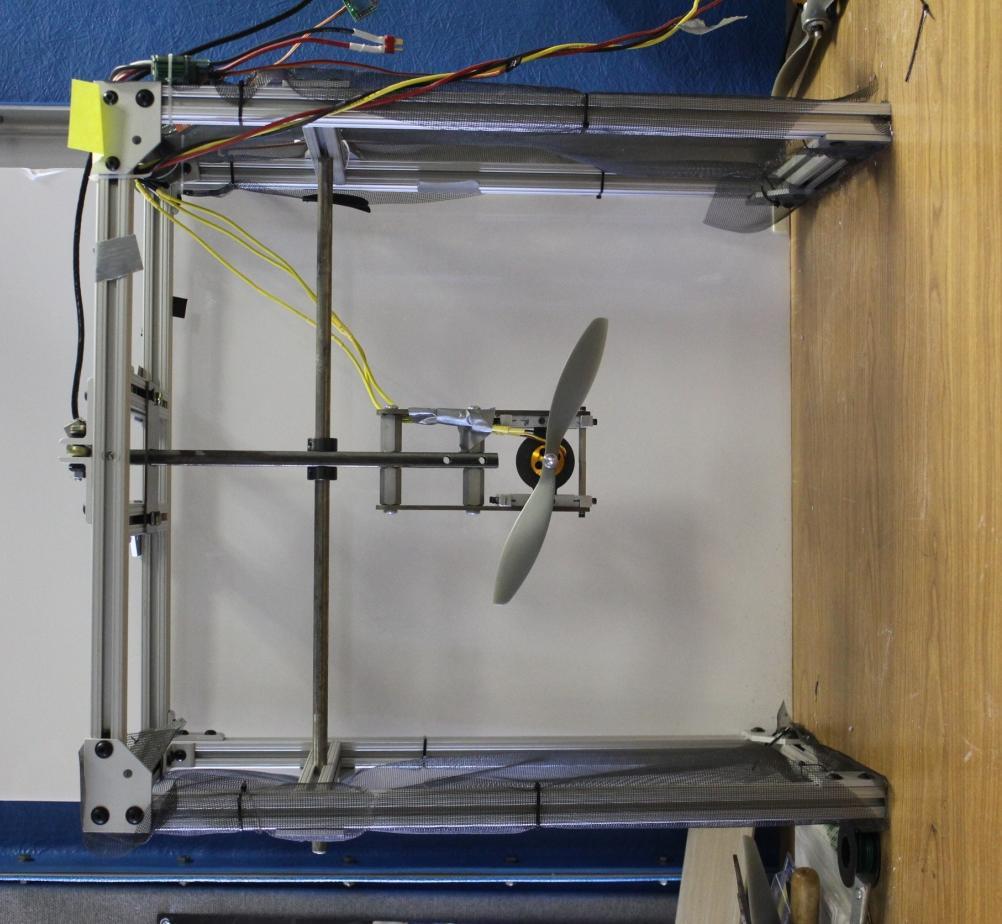
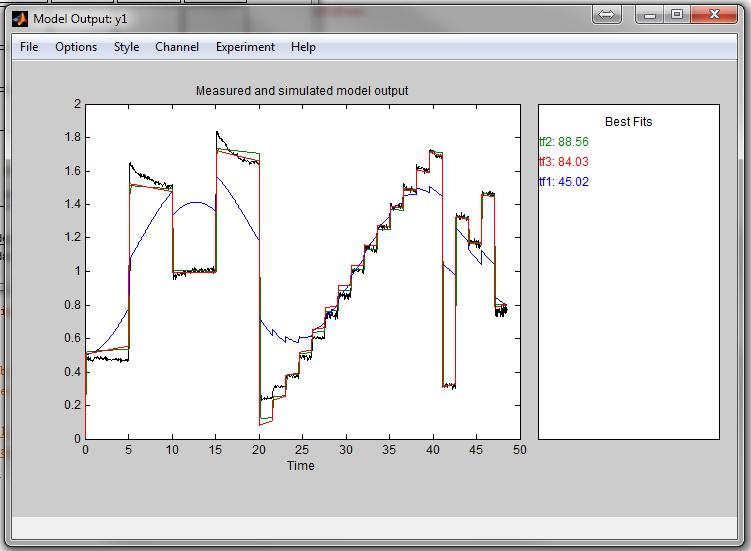
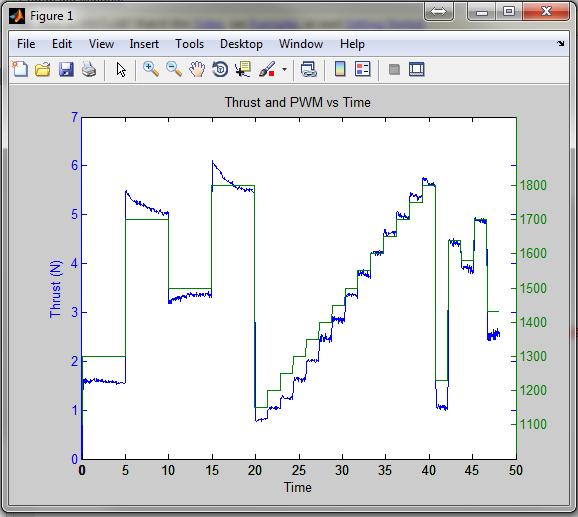
11 System Identification
12 Hardware Design

13 Design Evolution

 Flexible Landing Gear 4 X 37 Volt")
14 Design Evolution: First Generation Design First Generation: Configuration: Classic Quadrotor Aluminum Construction Titling Actuators (Thrust Vector Control) Ducted fans (1.25: 1 Thrust to Weight Ratio) Flexible Landing Gear 4 X 37 Volt Lithium-Polymer Battery (Flight Time: 2 minutes)


 Rigid")
15 Design Evolution: Second Generation Design Second Generation: Configuration: Tricopter Carbon Fiber, Glass Fiber and Foam Composite Material Fixed Actuators (Attitude Change Control) DC motors/propellers & Micro turbine (3:1 Thrust to Weight Ratio) Rigid Landing Gear



 DC")


16 Third Generation: Quad+ Design Design Specs: Configuration: Classic Quadrotor Modular Carbon Fiber Construction Fixed Actuators (Attitude Change Control) DC motors/propellers (3:1 Thrust to Weight Ratio) Flexible Landing Gear Low Center of Gravity (Increase landing stability)

17 3 rd Gen QuadX Hopper (in development) Hardware X Flight Configuration Acrylic / Wood Hub Carbon Fiber Struts Molded Plastic Connector ~ 1500 kg Propulsion System 750 Kv Motor 11x4.5 Propellers LiPo 4S mah ~ 13 min Flight Time Avionics Beaglebone Black CH Robotics UM7 IMU ArduDAQ XBee Pro S1
18 Avionics

19 Avionics Flight System Architecture

20 Flight Computer BeagleBone Black Linux Debian OS ARM Corex-A8 1 GHz CPU 4GB emmc Flash Memory 512 MB DDR3 RAM 2 x 46 IO Pins ADC/GPIO/PWM/I2C/SPI/UART HDMI $45

21 ArduDAQ Real-Time Flight Data Acquisition Arduino Micro GPS Receiver RF Receiver Altimeter Ultrasonic Range Sensor LiPo Voltage Sensor Liquid Crystal Display Designed For Old Flight Computer without IO Pins

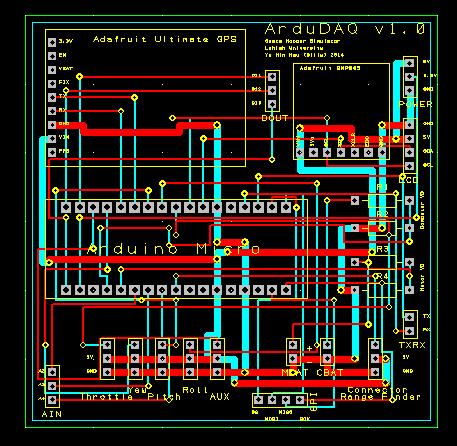
22 ArduDAQ PCB
23 Software Modules

24 Rig Test Process Flow

25 FlightOS Linear Processing Long Processing Time of Individual Module Data Acquisition Communication Interface Increased Delay in Control Loop
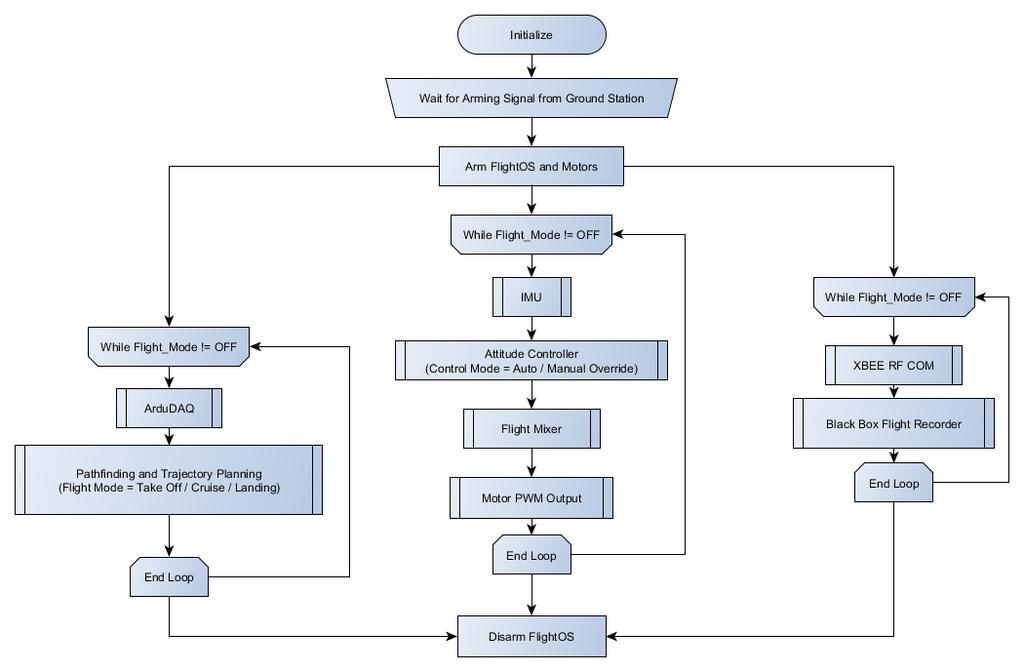
26 FlightOS Multithread
27 Attitude Control System PID Controller

28 Why do we need a attitude controller?
 Output Signal to Flight Mixer and Motors Example: flight leveling @")
29 PID Controller Proportional Integral Derivative Controller Compute Error from Input Signal and Sensor Data (IMU) Output Signal to Flight Mixer and Motors Example: flight 0
30 PID Gain Tuning Proportional Gain drive output signal from error Derivative Gain dampen and reduce oscillation Integral Gain reduce steady state error Challenges: overshoot, raise time, integral windup Manual Tuning Method - Tune Kp till system begin to oscillate - Tune Kd to reduce oscillation - Tune Ki to reduce steady state error
31 Cascade PID Controller Stacking PID controllers One controller control the set point of another Better performance Target Angle PID Controller (Angle) PID Controller (Angular Rate) Flight Mixer & Motors

32 Modified Cascade PID Controller Cascade PI-P Attitude Controller Avoid Derivative Term due to Amplification of Noise

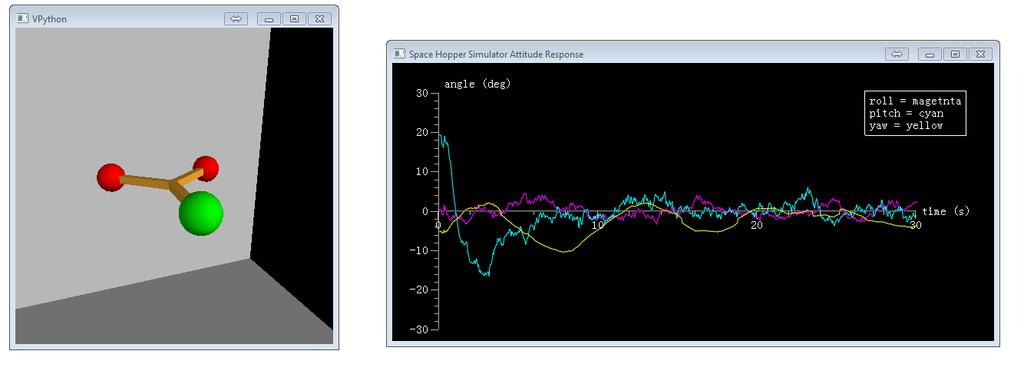
33 Rig Test with PID Roll and Pitch Controller

34 Rig Test and Live Gain Tuning
35 Attitude Control System Fuzzy Logic Controller
36 Fuzzyness Fuzzy Logic Control: What is Fuzzy Logic? Fuzzy Set Theory was first proposed by Lofti A. Zadeh in Fuzzy Sets are sets whose elements have a degree of membership. This form of logic is refereed to as many valued logic; which deals with approximate reason verse conventional Digital logic reasoning (either completely true or completely false). Fuzzy Logic allows control engineers to design controllers from human (expert) experience, and requires no analytical understand of the systems dynamics. Temperature, C

37 Fuzzy Logic Control: Basic Structure
38 Fuzzyness Fuzzy Logic Control: Fuzzification Temperature Example: Crisp Temperature Cold Warm Hot Temperature, C



39 Fuzzy Logic Control: FIS (Mamdani) Fuzzy Inference System: Is a way of mapping an input space to and output space using fuzzy logic. FIS uses a collection of membership functions and a rule base to reason data. This methodology is very similar to how humans interpret and reason data. Car Example: Car A Car B

40 Fuzzy Logic Control: Defuzzification Defuzzification: A method used to map the fuzzy output onto a crisp output
")
41 Fuzzy Logic Control: Attitude Control Attitude Control (P-D) Simulation:
 Test Results: What")
42 Fuzzy Logic Control: Attitude Control Attitude Control (P-D) Test Results: What Went Wong?

43 Fuzzy Logic Control: Attitude Control Question: What went wrong? No Sampling Rate Delay 25hz Sampling Rate Delay 200hz Sampling Rate Delay
44 Future Works
45 Software Optimization Bottleneck serial communication Reduce packet length by sending binary data (not too effective) Comparison of Programming Languages and IMU Data Retrieval Benchmark MATLAB Python C# Java C++ BBB No Yes No Yes Yes Cross-Platform Limited Yes Limited Yes Limited Implementation Easy Easy Moderate Moderate Difficult Speed Slow** 105 Hz* 210 Hz* 190 Hz* Fastest ** * Windows 7, AMD Phenom ii x6 3.4 GHz, 8 GB DDR3 RAM, 128 GB SSD ** Not Included Benchmarking Tests

46 Kalman Filter Position Tracking GPS Accuracy Position : < 3 meters Velocity: 0.1 m/s Might Cause Problem in Guidance and Controls Kalman Filter Sensor Fusion
 PID Controller (Angle) Flight Mixer")
47 Position Control: Cascade PID Target Location PID Controller (Position) PID Controller (Angle) Flight Mixer & Motors
48 Position Control: Adaptive Fuzzy Logic Research Interest - Fuzzy Model Reference Learning Control A learning controller that attempts to force a real System to behave like a reference model. FMRLC systems have been proven useful for nonlinear time varying systems.
49 Questions?
50 Backup Slides

51 Intel D33217 GKE Golden Lake

52 PID Flight Test

53 Flight Mixer
54 Image Credits Wikipedia Google Penn State Lunar Lion NASA
TEAM AERO-I TEAM AERO-I JOURNAL PAPER DELHI TECHNOLOGICAL UNIVERSITY Journal paper for IARC 2014
 TEAM AERO-I TEAM AERO-I JOURNAL PAPER DELHI TECHNOLOGICAL UNIVERSITY DELHI TECHNOLOGICAL UNIVERSITY Journal paper for IARC 2014 2014 IARC ABSTRACT The paper gives prominence to the technical details of
TEAM AERO-I TEAM AERO-I JOURNAL PAPER DELHI TECHNOLOGICAL UNIVERSITY DELHI TECHNOLOGICAL UNIVERSITY Journal paper for IARC 2014 2014 IARC ABSTRACT The paper gives prominence to the technical details of
OughtToPilot. Project Report of Submission PC128 to 2008 Propeller Design Contest. Jason Edelberg
 OughtToPilot Project Report of Submission PC128 to 2008 Propeller Design Contest Jason Edelberg Table of Contents Project Number.. 3 Project Description.. 4 Schematic 5 Source Code. Attached Separately
OughtToPilot Project Report of Submission PC128 to 2008 Propeller Design Contest Jason Edelberg Table of Contents Project Number.. 3 Project Description.. 4 Schematic 5 Source Code. Attached Separately
AUTOPILOT CONTROL SYSTEM - IV
 AUTOPILOT CONTROL SYSTEM - IV CONTROLLER The data from the inertial measurement unit is taken into the controller for processing. The input being analog requires to be passed through an ADC before being
AUTOPILOT CONTROL SYSTEM - IV CONTROLLER The data from the inertial measurement unit is taken into the controller for processing. The input being analog requires to be passed through an ADC before being
Modeling And Pid Cascade Control For Uav Type Quadrotor
 IOSR Journal of Dental and Medical Sciences (IOSR-JDMS) e-issn: 2279-0853, p-issn: 2279-0861.Volume 15, Issue 8 Ver. IX (August. 2016), PP 52-58 www.iosrjournals.org Modeling And Pid Cascade Control For
IOSR Journal of Dental and Medical Sciences (IOSR-JDMS) e-issn: 2279-0853, p-issn: 2279-0861.Volume 15, Issue 8 Ver. IX (August. 2016), PP 52-58 www.iosrjournals.org Modeling And Pid Cascade Control For
Introducing the Quadrotor Flying Robot
 Introducing the Quadrotor Flying Robot Roy Brewer Organizer Philadelphia Robotics Meetup Group August 13, 2009 What is a Quadrotor? A vehicle having 4 rotors (propellers) at each end of a square cross
Introducing the Quadrotor Flying Robot Roy Brewer Organizer Philadelphia Robotics Meetup Group August 13, 2009 What is a Quadrotor? A vehicle having 4 rotors (propellers) at each end of a square cross
Design of Self-tuning PID Controller Parameters Using Fuzzy Logic Controller for Quad-rotor Helicopter
 Design of Self-tuning PID Controller Parameters Using Fuzzy Logic Controller for Quad-rotor Helicopter Item type Authors Citation Journal Article Bousbaine, Amar; Bamgbose, Abraham; Poyi, Gwangtim Timothy;
Design of Self-tuning PID Controller Parameters Using Fuzzy Logic Controller for Quad-rotor Helicopter Item type Authors Citation Journal Article Bousbaine, Amar; Bamgbose, Abraham; Poyi, Gwangtim Timothy;
QUADROTOR ROLL AND PITCH STABILIZATION USING SYSTEM IDENTIFICATION BASED REDESIGN OF EMPIRICAL CONTROLLERS
 QUADROTOR ROLL AND PITCH STABILIZATION USING SYSTEM IDENTIFICATION BASED REDESIGN OF EMPIRICAL CONTROLLERS ANIL UFUK BATMAZ 1, a, OVUNC ELBIR 2,b and COSKU KASNAKOGLU 3,c 1,2,3 Department of Electrical
QUADROTOR ROLL AND PITCH STABILIZATION USING SYSTEM IDENTIFICATION BASED REDESIGN OF EMPIRICAL CONTROLLERS ANIL UFUK BATMAZ 1, a, OVUNC ELBIR 2,b and COSKU KASNAKOGLU 3,c 1,2,3 Department of Electrical
Flight control Set and Kit
 Flight control Set and Kit Quick Start Guide For MegaPirate NG Version 1.2 Thanks for choosing AirStudio flight control electronics. We have created it based on best-in-class software, hardware and our
Flight control Set and Kit Quick Start Guide For MegaPirate NG Version 1.2 Thanks for choosing AirStudio flight control electronics. We have created it based on best-in-class software, hardware and our
FUZZY CONTROL FOR THE KADET SENIOR RADIOCONTROLLED AIRPLANE
 FUZZY CONTROL FOR THE KADET SENIOR RADIOCONTROLLED AIRPLANE Angel Abusleme, Aldo Cipriano and Marcelo Guarini Department of Electrical Engineering, Pontificia Universidad Católica de Chile P. O. Box 306,
FUZZY CONTROL FOR THE KADET SENIOR RADIOCONTROLLED AIRPLANE Angel Abusleme, Aldo Cipriano and Marcelo Guarini Department of Electrical Engineering, Pontificia Universidad Católica de Chile P. O. Box 306,
The Next Generation Design of Autonomous MAV Flight Control System SmartAP
 The Next Generation Design of Autonomous MAV Flight Control System SmartAP Kirill Shilov Department of Aeromechanics and Flight Engineering Moscow Institute of Physics and Technology 16 Gagarina st, Zhukovsky,
The Next Generation Design of Autonomous MAV Flight Control System SmartAP Kirill Shilov Department of Aeromechanics and Flight Engineering Moscow Institute of Physics and Technology 16 Gagarina st, Zhukovsky,
Development of Fuzzy Logic Controller for Quanser Bench-Top Helicopter
 IOP Conference Series: Materials Science and Engineering PAPER OPEN ACCESS Development of Fuzzy Logic Controller for Quanser Bench-Top Helicopter To cite this article: M. H. Jafri et al 2017 IOP Conf.
IOP Conference Series: Materials Science and Engineering PAPER OPEN ACCESS Development of Fuzzy Logic Controller for Quanser Bench-Top Helicopter To cite this article: M. H. Jafri et al 2017 IOP Conf.
TigreSAT 2010 &2011 June Monthly Report
 2010-2011 TigreSAT Monthly Progress Report EQUIS ADS 2010 PAYLOAD No changes have been done to the payload since it had passed all the tests, requirements and integration that are necessary for LSU HASP
2010-2011 TigreSAT Monthly Progress Report EQUIS ADS 2010 PAYLOAD No changes have been done to the payload since it had passed all the tests, requirements and integration that are necessary for LSU HASP
Heterogeneous Control of Small Size Unmanned Aerial Vehicles
 Magyar Kutatók 10. Nemzetközi Szimpóziuma 10 th International Symposium of Hungarian Researchers on Computational Intelligence and Informatics Heterogeneous Control of Small Size Unmanned Aerial Vehicles
Magyar Kutatók 10. Nemzetközi Szimpóziuma 10 th International Symposium of Hungarian Researchers on Computational Intelligence and Informatics Heterogeneous Control of Small Size Unmanned Aerial Vehicles
ZJUDancer Team Description Paper Humanoid Kid-Size League of Robocup 2015
 ZJUDancer Team Description Paper Humanoid Kid-Size League of Robocup 2015 Yu DongDong, Liu Yun, Zhou Chunlin, and Xiong Rong State Key Lab. of Industrial Control Technology, Zhejiang University, Hangzhou,
ZJUDancer Team Description Paper Humanoid Kid-Size League of Robocup 2015 Yu DongDong, Liu Yun, Zhou Chunlin, and Xiong Rong State Key Lab. of Industrial Control Technology, Zhejiang University, Hangzhou,
Robust Control Design for Rotary Inverted Pendulum Balance
 Indian Journal of Science and Technology, Vol 9(28), DOI: 1.17485/ijst/216/v9i28/9387, July 216 ISSN (Print) : 974-6846 ISSN (Online) : 974-5645 Robust Control Design for Rotary Inverted Pendulum Balance
Indian Journal of Science and Technology, Vol 9(28), DOI: 1.17485/ijst/216/v9i28/9387, July 216 ISSN (Print) : 974-6846 ISSN (Online) : 974-5645 Robust Control Design for Rotary Inverted Pendulum Balance
Classical Control Based Autopilot Design Using PC/104
 Classical Control Based Autopilot Design Using PC/104 Mohammed A. Elsadig, Alneelain University, Dr. Mohammed A. Hussien, Alneelain University. Abstract Many recent papers have been written in unmanned
Classical Control Based Autopilot Design Using PC/104 Mohammed A. Elsadig, Alneelain University, Dr. Mohammed A. Hussien, Alneelain University. Abstract Many recent papers have been written in unmanned
Sensors and Sensing Motors, Encoders and Motor Control
 Sensors and Sensing Motors, Encoders and Motor Control Todor Stoyanov Mobile Robotics and Olfaction Lab Center for Applied Autonomous Sensor Systems Örebro University, Sweden todor.stoyanov@oru.se 13.11.2014
Sensors and Sensing Motors, Encoders and Motor Control Todor Stoyanov Mobile Robotics and Olfaction Lab Center for Applied Autonomous Sensor Systems Örebro University, Sweden todor.stoyanov@oru.se 13.11.2014
MEM380 Applied Autonomous Robots I Winter Feedback Control USARSim
 MEM380 Applied Autonomous Robots I Winter 2011 Feedback Control USARSim Transforming Accelerations into Position Estimates In a perfect world It s not a perfect world. We have noise and bias in our acceleration
MEM380 Applied Autonomous Robots I Winter 2011 Feedback Control USARSim Transforming Accelerations into Position Estimates In a perfect world It s not a perfect world. We have noise and bias in our acceleration
Control System Design for Tricopter using Filters and PID controller
 Control System Design for Tricopter using Filters and PID controller Abstract The purpose of this paper is to present the control system design of Tricopter. We have presented the implementation of control
Control System Design for Tricopter using Filters and PID controller Abstract The purpose of this paper is to present the control system design of Tricopter. We have presented the implementation of control
302 VIBROENGINEERING. JOURNAL OF VIBROENGINEERING. MARCH VOLUME 15, ISSUE 1. ISSN
 949. A distributed and low-order GPS/SINS algorithm of flight parameters estimation for unmanned vehicle Jiandong Guo, Pinqi Xia, Yanguo Song Jiandong Guo 1, Pinqi Xia 2, Yanguo Song 3 College of Aerospace
949. A distributed and low-order GPS/SINS algorithm of flight parameters estimation for unmanned vehicle Jiandong Guo, Pinqi Xia, Yanguo Song Jiandong Guo 1, Pinqi Xia 2, Yanguo Song 3 College of Aerospace
Optimizing Performance Using Slotless Motors. Mark Holcomb, Celera Motion
 Optimizing Performance Using Slotless Motors Mark Holcomb, Celera Motion Agenda 1. How PWM drives interact with motor resistance and inductance 2. Ways to reduce motor heating 3. Locked rotor test vs.
Optimizing Performance Using Slotless Motors Mark Holcomb, Celera Motion Agenda 1. How PWM drives interact with motor resistance and inductance 2. Ways to reduce motor heating 3. Locked rotor test vs.
Platform Independent Launch Vehicle Avionics
 Platform Independent Launch Vehicle Avionics Small Satellite Conference Logan, Utah August 5 th, 2014 Company Introduction Founded in 2011 The Co-Founders blend Academia and Commercial Experience ~20 Employees
Platform Independent Launch Vehicle Avionics Small Satellite Conference Logan, Utah August 5 th, 2014 Company Introduction Founded in 2011 The Co-Founders blend Academia and Commercial Experience ~20 Employees
Optimal Control System Design
 Chapter 6 Optimal Control System Design 6.1 INTRODUCTION The active AFO consists of sensor unit, control system and an actuator. While designing the control system for an AFO, a trade-off between the transient
Chapter 6 Optimal Control System Design 6.1 INTRODUCTION The active AFO consists of sensor unit, control system and an actuator. While designing the control system for an AFO, a trade-off between the transient
CubeSat Navigation System and Software Design. Submitted for CIS-4722 Senior Project II Vermont Technical College Al Corkery
 CubeSat Navigation System and Software Design Submitted for CIS-4722 Senior Project II Vermont Technical College Al Corkery Project Objectives Research the technical aspects of integrating the CubeSat
CubeSat Navigation System and Software Design Submitted for CIS-4722 Senior Project II Vermont Technical College Al Corkery Project Objectives Research the technical aspects of integrating the CubeSat
FLCS V2.1. AHRS, Autopilot, Gyro Stabilized Gimbals Control, Ground Control Station
 AHRS, Autopilot, Gyro Stabilized Gimbals Control, Ground Control Station The platform provides a high performance basis for electromechanical system control. Originally designed for autonomous aerial vehicle
AHRS, Autopilot, Gyro Stabilized Gimbals Control, Ground Control Station The platform provides a high performance basis for electromechanical system control. Originally designed for autonomous aerial vehicle
ZJUDancer Team Description Paper Humanoid Kid-Size League of Robocup 2014
 ZJUDancer Team Description Paper Humanoid Kid-Size League of Robocup 2014 Yu DongDong, Xiang Chuan, Zhou Chunlin, and Xiong Rong State Key Lab. of Industrial Control Technology, Zhejiang University, Hangzhou,
ZJUDancer Team Description Paper Humanoid Kid-Size League of Robocup 2014 Yu DongDong, Xiang Chuan, Zhou Chunlin, and Xiong Rong State Key Lab. of Industrial Control Technology, Zhejiang University, Hangzhou,
Study of M.A.R.S. (Multifunctional Aero-drone for Remote Surveillance)
") Study of M.A.R.S. (Multifunctional Aero-drone for Remote Surveillance) Supriya Bhuran 1, Rohit V. Agrawal 2, Kiran D. Bombe 2, Somiran T. Karmakar 2, Ninad V. Bapat 2 1 Assistant Professor, Dept. Instrumentation,
Study of M.A.R.S. (Multifunctional Aero-drone for Remote Surveillance) Supriya Bhuran 1, Rohit V. Agrawal 2, Kiran D. Bombe 2, Somiran T. Karmakar 2, Ninad V. Bapat 2 1 Assistant Professor, Dept. Instrumentation,
Project Advisor : Dr. Abdulla Ismail
 United Arab Emirates University College of Engineering Department of Electrical Engineering Graduation Project II Name of Group: ID: Halima Ali Khalfan 200210259 Sheikha Mohamed Hebsi 200309885 Fatima
United Arab Emirates University College of Engineering Department of Electrical Engineering Graduation Project II Name of Group: ID: Halima Ali Khalfan 200210259 Sheikha Mohamed Hebsi 200309885 Fatima
Inertial Sensors. Ellipse 2 Series MINIATURE HIGH PERFORMANCE. Navigation, Motion & Heave Sensing IMU AHRS MRU INS VG
 Ellipse 2 Series MINIATURE HIGH PERFORMANCE Inertial Sensors IMU AHRS MRU INS VG ITAR Free 0.1 RMS Navigation, Motion & Heave Sensing ELLIPSE SERIES sets up new standard for miniature and cost-effective
Ellipse 2 Series MINIATURE HIGH PERFORMANCE Inertial Sensors IMU AHRS MRU INS VG ITAR Free 0.1 RMS Navigation, Motion & Heave Sensing ELLIPSE SERIES sets up new standard for miniature and cost-effective
Inertial Sensors. Ellipse 2 Series MINIATURE HIGH PERFORMANCE. Navigation, Motion & Heave Sensing IMU AHRS MRU INS VG
 Ellipse 2 Series MINIATURE HIGH PERFORMANCE Inertial Sensors IMU AHRS MRU INS VG ITAR Free 0.1 RMS Navigation, Motion & Heave Sensing ELLIPSE SERIES sets up new standard for miniature and cost-effective
Ellipse 2 Series MINIATURE HIGH PERFORMANCE Inertial Sensors IMU AHRS MRU INS VG ITAR Free 0.1 RMS Navigation, Motion & Heave Sensing ELLIPSE SERIES sets up new standard for miniature and cost-effective
Comparative Study of PID and Fuzzy Controllers for Speed Control of DC Motor
 Comparative Study of PID and Fuzzy Controllers for Speed Control of DC Motor Osama Omer Adam Mohammed 1, Dr. Awadalla Taifor Ali 2 P.G. Student, Department of Control Engineering, Faculty of Engineering,
Comparative Study of PID and Fuzzy Controllers for Speed Control of DC Motor Osama Omer Adam Mohammed 1, Dr. Awadalla Taifor Ali 2 P.G. Student, Department of Control Engineering, Faculty of Engineering,
One-degree-of-freedom PID controlled Helicopter. PDE 2420 Control Systems
 One-degree-of-freedom PID controlled Helicopter PDE 2420 Control Systems Abdelati Zelbane Eduardo Abend M00374639 M00375571 Payam Rahmdel May 2013 Table of Contents 1. Introduction... 3 2. Description
One-degree-of-freedom PID controlled Helicopter PDE 2420 Control Systems Abdelati Zelbane Eduardo Abend M00374639 M00375571 Payam Rahmdel May 2013 Table of Contents 1. Introduction... 3 2. Description
ZJU Team Entry for the 2013 AUVSI. International Aerial Robotics Competition
 ZJU Team Entry for the 2013 AUVSI International Aerial Robotics Competition Lin ZHANG, Tianheng KONG, Chen LI, Xiaohuan YU, Zihao SONG Zhejiang University, Hangzhou 310027, China ABSTRACT This paper introduces
ZJU Team Entry for the 2013 AUVSI International Aerial Robotics Competition Lin ZHANG, Tianheng KONG, Chen LI, Xiaohuan YU, Zihao SONG Zhejiang University, Hangzhou 310027, China ABSTRACT This paper introduces
Inertial Sensors. Ellipse Series MINIATURE HIGH PERFORMANCE. Navigation, Motion & Heave Sensing IMU AHRS MRU INS VG
 Ellipse Series MINIATURE HIGH PERFORMANCE Inertial Sensors IMU AHRS MRU INS VG ITAR Free 0.1 RMS Navigation, Motion & Heave Sensing ELLIPSE SERIES sets up new standard for miniature and cost-effective
Ellipse Series MINIATURE HIGH PERFORMANCE Inertial Sensors IMU AHRS MRU INS VG ITAR Free 0.1 RMS Navigation, Motion & Heave Sensing ELLIPSE SERIES sets up new standard for miniature and cost-effective
A Fuzzy Knowledge-Based Controller to Tune PID Parameters
 Session 2520 A Fuzzy Knowledge-Based Controller to Tune PID Parameters Ali Eydgahi, Mohammad Fotouhi Engineering and Aviation Sciences Department / Technology Department University of Maryland Eastern
Session 2520 A Fuzzy Knowledge-Based Controller to Tune PID Parameters Ali Eydgahi, Mohammad Fotouhi Engineering and Aviation Sciences Department / Technology Department University of Maryland Eastern
Sensors and Sensing Motors, Encoders and Motor Control
 Sensors and Sensing Motors, Encoders and Motor Control Todor Stoyanov Mobile Robotics and Olfaction Lab Center for Applied Autonomous Sensor Systems Örebro University, Sweden todor.stoyanov@oru.se 05.11.2015
Sensors and Sensing Motors, Encoders and Motor Control Todor Stoyanov Mobile Robotics and Olfaction Lab Center for Applied Autonomous Sensor Systems Örebro University, Sweden todor.stoyanov@oru.se 05.11.2015
ATPE Simulator: Simulation Tool for Onboard GNC Development and Validation
 ATPE Simulator: Simulation Tool for Onboard GNC Development and Validation Uwe Brüge Uwe Soppa Presented by Eugénio Ferreira GNC & On-board S/W Engineering 3rd ESA Workshop on Astrodynamics Tools and Techniques
ATPE Simulator: Simulation Tool for Onboard GNC Development and Validation Uwe Brüge Uwe Soppa Presented by Eugénio Ferreira GNC & On-board S/W Engineering 3rd ESA Workshop on Astrodynamics Tools and Techniques
EMBEDDED ONBOARD CONTROL OF A QUADROTOR AERIAL VEHICLE 5
 EMBEDDED ONBOARD CONTROL OF A QUADROTOR AERIAL VEHICLE Cory J. Bryan, Mitchel R. Grenwalt, Adam W. Stienecker, Ohio Northern University Abstract The quadrotor aerial vehicle is a structure that has recently
EMBEDDED ONBOARD CONTROL OF A QUADROTOR AERIAL VEHICLE Cory J. Bryan, Mitchel R. Grenwalt, Adam W. Stienecker, Ohio Northern University Abstract The quadrotor aerial vehicle is a structure that has recently
KMUTT Kickers: Team Description Paper
 KMUTT Kickers: Team Description Paper Thavida Maneewarn, Xye, Korawit Kawinkhrue, Amnart Butsongka, Nattapong Kaewlek King Mongkut s University of Technology Thonburi, Institute of Field Robotics (FIBO)
KMUTT Kickers: Team Description Paper Thavida Maneewarn, Xye, Korawit Kawinkhrue, Amnart Butsongka, Nattapong Kaewlek King Mongkut s University of Technology Thonburi, Institute of Field Robotics (FIBO)
CHAPTER 6. CALCULATION OF TUNING PARAMETERS FOR VIBRATION CONTROL USING LabVIEW
 130 CHAPTER 6 CALCULATION OF TUNING PARAMETERS FOR VIBRATION CONTROL USING LabVIEW 6.1 INTRODUCTION Vibration control of rotating machinery is tougher and a challenging challengerical technical problem.
130 CHAPTER 6 CALCULATION OF TUNING PARAMETERS FOR VIBRATION CONTROL USING LabVIEW 6.1 INTRODUCTION Vibration control of rotating machinery is tougher and a challenging challengerical technical problem.
GPS-Aided INS Datasheet Rev. 2.3
 GPS-Aided INS 1 The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined L1 & L2 GPS, GLONASS, GALILEO and BEIDOU navigation and
GPS-Aided INS 1 The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined L1 & L2 GPS, GLONASS, GALILEO and BEIDOU navigation and
OPTIMAL AND PID CONTROLLER FOR CONTROLLING CAMERA S POSITION IN UNMANNED AERIAL VEHICLES
 International Journal of Information Technology, Modeling and Computing (IJITMC) Vol.1,No.4,November 2013 OPTIMAL AND PID CONTROLLER FOR CONTROLLING CAMERA S POSITION IN UNMANNED AERIAL VEHICLES MOHAMMAD
International Journal of Information Technology, Modeling and Computing (IJITMC) Vol.1,No.4,November 2013 OPTIMAL AND PID CONTROLLER FOR CONTROLLING CAMERA S POSITION IN UNMANNED AERIAL VEHICLES MOHAMMAD
CubeSat Proximity Operations Demonstration (CPOD) Vehicle Avionics and Design
 Vehicle Avionics and Design") CubeSat Proximity Operations Demonstration (CPOD) Vehicle Avionics and Design August CubeSat Workshop 2015 Austin Williams VP, Space Vehicles CPOD: Big Capability in a Small Package Communications ADCS
CubeSat Proximity Operations Demonstration (CPOD) Vehicle Avionics and Design August CubeSat Workshop 2015 Austin Williams VP, Space Vehicles CPOD: Big Capability in a Small Package Communications ADCS
Joint Australian Engineering (Micro) Satellite (JAESat) - A GNSS Technology Demonstration Mission
 Satellite (JAESat) - A GNSS Technology Demonstration Mission") Journal of Global Positioning Systems (2005) Vol. 4, No. 1-2: 277-283 Joint Australian Engineering (Micro) Satellite (JAESat) - A GNSS Technology Demonstration Mission Werner Enderle Cooperative Research
Journal of Global Positioning Systems (2005) Vol. 4, No. 1-2: 277-283 Joint Australian Engineering (Micro) Satellite (JAESat) - A GNSS Technology Demonstration Mission Werner Enderle Cooperative Research
DEVELOPMENT OF AN AUTONOMOUS SMALL SCALE ELECTRIC CAR
 Jurnal Mekanikal June 2015, Vol 38, 81-91 DEVELOPMENT OF AN AUTONOMOUS SMALL SCALE ELECTRIC CAR Amzar Omairi and Saiful Anuar Abu Bakar* Department of Aeronautics, Automotive and Ocean Engineering Faculty
Jurnal Mekanikal June 2015, Vol 38, 81-91 DEVELOPMENT OF AN AUTONOMOUS SMALL SCALE ELECTRIC CAR Amzar Omairi and Saiful Anuar Abu Bakar* Department of Aeronautics, Automotive and Ocean Engineering Faculty
GPS-Aided INS Datasheet Rev. 2.6
 GPS-Aided INS 1 GPS-Aided INS The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined GPS, GLONASS, GALILEO and BEIDOU navigation
GPS-Aided INS 1 GPS-Aided INS The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined GPS, GLONASS, GALILEO and BEIDOU navigation
ME375 Lab Project. Bradley Boane & Jeremy Bourque April 25, 2018
 ME375 Lab Project Bradley Boane & Jeremy Bourque April 25, 2018 Introduction: The goal of this project was to build and program a two-wheel robot that travels forward in a straight line for a distance
ME375 Lab Project Bradley Boane & Jeremy Bourque April 25, 2018 Introduction: The goal of this project was to build and program a two-wheel robot that travels forward in a straight line for a distance
ARDUINO BASED CALIBRATION OF AN INERTIAL SENSOR IN VIEW OF A GNSS/IMU INTEGRATION
 Journal of Young Scientist, Volume IV, 2016 ISSN 2344-1283; ISSN CD-ROM 2344-1291; ISSN Online 2344-1305; ISSN-L 2344 1283 ARDUINO BASED CALIBRATION OF AN INERTIAL SENSOR IN VIEW OF A GNSS/IMU INTEGRATION
Journal of Young Scientist, Volume IV, 2016 ISSN 2344-1283; ISSN CD-ROM 2344-1291; ISSN Online 2344-1305; ISSN-L 2344 1283 ARDUINO BASED CALIBRATION OF AN INERTIAL SENSOR IN VIEW OF A GNSS/IMU INTEGRATION
GPS System Design and Control Modeling. Chua Shyan Jin, Ronald. Assoc. Prof Gerard Leng. Aeronautical Engineering Group, NUS
 GPS System Design and Control Modeling Chua Shyan Jin, Ronald Assoc. Prof Gerard Leng Aeronautical Engineering Group, NUS Abstract A GPS system for the autonomous navigation and surveillance of an airship
GPS System Design and Control Modeling Chua Shyan Jin, Ronald Assoc. Prof Gerard Leng Aeronautical Engineering Group, NUS Abstract A GPS system for the autonomous navigation and surveillance of an airship
Digital Control of MS-150 Modular Position Servo System
 IEEE NECEC Nov. 8, 2007 St. John's NL 1 Digital Control of MS-150 Modular Position Servo System Farid Arvani, Syeda N. Ferdaus, M. Tariq Iqbal Faculty of Engineering, Memorial University of Newfoundland
IEEE NECEC Nov. 8, 2007 St. John's NL 1 Digital Control of MS-150 Modular Position Servo System Farid Arvani, Syeda N. Ferdaus, M. Tariq Iqbal Faculty of Engineering, Memorial University of Newfoundland
School of Surveying & Spatial Information Systems, UNSW, Sydney, Australia
 Development of an Unmanned Aerial Vehicle Platform Using Multisensor Navigation Technology School of Surveying & Spatial Information Systems, UNSW, Sydney, Australia Gang Sun 1,2, Jiawei Xie 1, Yong Li
Development of an Unmanned Aerial Vehicle Platform Using Multisensor Navigation Technology School of Surveying & Spatial Information Systems, UNSW, Sydney, Australia Gang Sun 1,2, Jiawei Xie 1, Yong Li
Testing Autonomous Hover Algorithms Using a Quad rotor Helicopter Test Bed
 Testing Autonomous Hover Algorithms Using a Quad rotor Helicopter Test Bed In conjunction with University of Washington Distributed Space Systems Lab Justin Palm Andy Bradford Andrew Nelson Milestone One
Testing Autonomous Hover Algorithms Using a Quad rotor Helicopter Test Bed In conjunction with University of Washington Distributed Space Systems Lab Justin Palm Andy Bradford Andrew Nelson Milestone One
DEPARTMENT OF ELECTRICAL AND ELECTRONIC ENGINEERING BANGLADESH UNIVERSITY OF ENGINEERING & TECHNOLOGY EEE 402 : CONTROL SYSTEMS SESSIONAL
 DEPARTMENT OF ELECTRICAL AND ELECTRONIC ENGINEERING BANGLADESH UNIVERSITY OF ENGINEERING & TECHNOLOGY EEE 402 : CONTROL SYSTEMS SESSIONAL Experiment No. 1(a) : Modeling of physical systems and study of
DEPARTMENT OF ELECTRICAL AND ELECTRONIC ENGINEERING BANGLADESH UNIVERSITY OF ENGINEERING & TECHNOLOGY EEE 402 : CONTROL SYSTEMS SESSIONAL Experiment No. 1(a) : Modeling of physical systems and study of
DESIGN CONSTRAINTS ANALYSIS
 TEAM 9 -MRAV DESIGN CONSTRAINTS ANALYSIS by Nick Gentry UPDATED PSSC 1. An ability to remotely monitor remaining battery life (fuel gauge). 2. An ability to hover in a stable position (based on autonomous
TEAM 9 -MRAV DESIGN CONSTRAINTS ANALYSIS by Nick Gentry UPDATED PSSC 1. An ability to remotely monitor remaining battery life (fuel gauge). 2. An ability to hover in a stable position (based on autonomous
Baset Adult-Size 2016 Team Description Paper
 Baset Adult-Size 2016 Team Description Paper Mojtaba Hosseini, Vahid Mohammadi, Farhad Jafari 2, Dr. Esfandiar Bamdad 1 1 Humanoid Robotic Laboratory, Robotic Center, Baset Pazhuh Tehran company. No383,
Baset Adult-Size 2016 Team Description Paper Mojtaba Hosseini, Vahid Mohammadi, Farhad Jafari 2, Dr. Esfandiar Bamdad 1 1 Humanoid Robotic Laboratory, Robotic Center, Baset Pazhuh Tehran company. No383,
Construction and signal filtering in Quadrotor
 Construction and signal filtering in Quadrotor Arkadiusz KUBACKI, Piotr OWCZAREK, Adam OWCZARKOWSKI*, Arkadiusz JAKUBOWSKI Institute of Mechanical Technology, *Institute of Control and Information Engineering,
Construction and signal filtering in Quadrotor Arkadiusz KUBACKI, Piotr OWCZAREK, Adam OWCZARKOWSKI*, Arkadiusz JAKUBOWSKI Institute of Mechanical Technology, *Institute of Control and Information Engineering,
International Journal of Advance Engineering and Research Development
 Scientific Journal of Impact Factor (SJIF): 4.14 International Journal of Advance Engineering and Research Development Volume 3, Issue 2, February -2016 e-issn (O): 2348-4470 p-issn (P): 2348-6406 SIMULATION
Scientific Journal of Impact Factor (SJIF): 4.14 International Journal of Advance Engineering and Research Development Volume 3, Issue 2, February -2016 e-issn (O): 2348-4470 p-issn (P): 2348-6406 SIMULATION
The Evolution of Nano-Satellite Proximity Operations In-Space Inspection Workshop 2017
 The Evolution of Nano-Satellite Proximity Operations 02-01-2017 In-Space Inspection Workshop 2017 Tyvak Introduction We develop miniaturized custom spacecraft, launch solutions, and aerospace technologies
The Evolution of Nano-Satellite Proximity Operations 02-01-2017 In-Space Inspection Workshop 2017 Tyvak Introduction We develop miniaturized custom spacecraft, launch solutions, and aerospace technologies
1, 2, 3,
 AUTOMATIC SHIP CONTROLLER USING FUZZY LOGIC Seema Singh 1, Pooja M 2, Pavithra K 3, Nandini V 4, Sahana D V 5 1 Associate Prof., Dept. of Electronics and Comm., BMS Institute of Technology and Management
AUTOMATIC SHIP CONTROLLER USING FUZZY LOGIC Seema Singh 1, Pooja M 2, Pavithra K 3, Nandini V 4, Sahana D V 5 1 Associate Prof., Dept. of Electronics and Comm., BMS Institute of Technology and Management
New Data Recorder for Gun Launch and Impact Test with Options for Built-in High G Accelerometers and Angular Rate Sensors
 New Data Recorder for Gun Launch and Impact Test with Options for Built-in High G Accelerometers and Angular Rate Sensors Stephen Pruitt steve.pruitt@dtsweb.com May, 2011 DTS Introduction Data recorders
New Data Recorder for Gun Launch and Impact Test with Options for Built-in High G Accelerometers and Angular Rate Sensors Stephen Pruitt steve.pruitt@dtsweb.com May, 2011 DTS Introduction Data recorders
State observers based on detailed multibody models applied to an automobile
 State observers based on detailed multibody models applied to an automobile Emilio Sanjurjo, Advisors: Miguel Ángel Naya Villaverde Javier Cuadrado Aranda Outline Introduction Multibody Dynamics Kalman
State observers based on detailed multibody models applied to an automobile Emilio Sanjurjo, Advisors: Miguel Ángel Naya Villaverde Javier Cuadrado Aranda Outline Introduction Multibody Dynamics Kalman
MCT Susanoo Logics 2014 Team Description
 MCT Susanoo Logics 2014 Team Description Satoshi Takata, Yuji Horie, Shota Aoki, Kazuhiro Fujiwara, Taihei Degawa Matsue College of Technology 14-4, Nishiikumacho, Matsue-shi, Shimane, 690-8518, Japan
MCT Susanoo Logics 2014 Team Description Satoshi Takata, Yuji Horie, Shota Aoki, Kazuhiro Fujiwara, Taihei Degawa Matsue College of Technology 14-4, Nishiikumacho, Matsue-shi, Shimane, 690-8518, Japan
PR2 HEAD AND HAND MANIPULATION THROUGH TELE-OPERATION
 PR2 HEAD AND HAND MANIPULATION THROUGH TELE-OPERATION Using an Attitude and Heading Reference System Jason Allen, SUNFEST (EE), University of the District of Columbia Advisor: Dr. Camillo J. Taylor A Brief
PR2 HEAD AND HAND MANIPULATION THROUGH TELE-OPERATION Using an Attitude and Heading Reference System Jason Allen, SUNFEST (EE), University of the District of Columbia Advisor: Dr. Camillo J. Taylor A Brief
Frequency-Domain System Identification and Simulation of a Quadrotor Controller
 AIAA SciTech 13-17 January 2014, National Harbor, Maryland AIAA Modeling and Simulation Technologies Conference AIAA 2014-1342 Frequency-Domain System Identification and Simulation of a Quadrotor Controller
AIAA SciTech 13-17 January 2014, National Harbor, Maryland AIAA Modeling and Simulation Technologies Conference AIAA 2014-1342 Frequency-Domain System Identification and Simulation of a Quadrotor Controller
Design of an Intelligent Pressure Control System Based on the Fuzzy Self-tuning PID Controller
 Design of an Intelligent Pressure Control System Based on the Fuzzy Self-tuning PID Controller 1 Deepa S. Bhandare, 2 N. R.Kulkarni 1,2 Department of Electrical Engineering, Modern College of Engineering,
Design of an Intelligent Pressure Control System Based on the Fuzzy Self-tuning PID Controller 1 Deepa S. Bhandare, 2 N. R.Kulkarni 1,2 Department of Electrical Engineering, Modern College of Engineering,
DC Motor Position Control Using Fuzzy Proportional-Derivative Controllers With Different Defuzzification Methods
 IOSR Journal of Electrical and Electronics Engineering (IOSR-JEEE) e-issn: 2278-1676,p-ISSN: 2320-3331, Volume 10, Issue 1 Ver. III (Jan Feb. 2015), PP 37-47 www.iosrjournals.org DC Motor Position Control
IOSR Journal of Electrical and Electronics Engineering (IOSR-JEEE) e-issn: 2278-1676,p-ISSN: 2320-3331, Volume 10, Issue 1 Ver. III (Jan Feb. 2015), PP 37-47 www.iosrjournals.org DC Motor Position Control
Thrust estimation by fuzzy modeling of coaxial propulsion unit for multirotor UAVs
 2016 IEEE International Conference on Multisensor Fusion and Integration for Intelligent Systems (MFI 2016) Kongresshaus Baden-Baden, Germany, Sep. 19-21, 2016 Thrust estimation by fuzzy modeling of coaxial
2016 IEEE International Conference on Multisensor Fusion and Integration for Intelligent Systems (MFI 2016) Kongresshaus Baden-Baden, Germany, Sep. 19-21, 2016 Thrust estimation by fuzzy modeling of coaxial
Design of Different Controller for Cruise Control System
 Design of Different Controller for Cruise Control System Anushek Kumar 1, Prof. (Dr.) Deoraj Kumar Tanti 2 1 Research Scholar, 2 Associate Professor 1,2 Electrical Department, Bit Sindri Dhanbad, (India)
Design of Different Controller for Cruise Control System Anushek Kumar 1, Prof. (Dr.) Deoraj Kumar Tanti 2 1 Research Scholar, 2 Associate Professor 1,2 Electrical Department, Bit Sindri Dhanbad, (India)
Embedded Control Project -Iterative learning control for
 Embedded Control Project -Iterative learning control for Author : Axel Andersson Hariprasad Govindharajan Shahrzad Khodayari Project Guide : Alexander Medvedev Program : Embedded Systems and Engineering
Embedded Control Project -Iterative learning control for Author : Axel Andersson Hariprasad Govindharajan Shahrzad Khodayari Project Guide : Alexander Medvedev Program : Embedded Systems and Engineering
6.270 Lecture. Control Systems
 6.270 Lecture Control Systems Steven Jorgensen Massachusetts Institute of Technology January 2014 Overview of Lecture Feed Forward Open Loop Controller Pros and Cons Bang-Bang Closed Loop Controller Intro
6.270 Lecture Control Systems Steven Jorgensen Massachusetts Institute of Technology January 2014 Overview of Lecture Feed Forward Open Loop Controller Pros and Cons Bang-Bang Closed Loop Controller Intro
Time Response Analysis of a DC Motor Speed Control with PI and Fuzzy Logic Using LAB View Compact RIO
 Time Response Analysis of a DC Motor Speed Control with PI and Fuzzy Logic Using LAB View Compact RIO B. Udaya Kumar 1, Dr. M. Ramesh Patnaik 2 1 Associate professor, Dept of Electronics and Instrumentation,
Time Response Analysis of a DC Motor Speed Control with PI and Fuzzy Logic Using LAB View Compact RIO B. Udaya Kumar 1, Dr. M. Ramesh Patnaik 2 1 Associate professor, Dept of Electronics and Instrumentation,
THE ARDUINO ENGINEERING KIT INFORMATION GUIDE ARDUINO.CC/EDUCATION
 THE ARDUINO ENGINEERING KIT INFORMATION GUIDE ARDUINO.CC/EDUCATION Includes 1-year individual user license of: In collaboration with: INSPIRING TEACHING & EMPOWERING TABLE OF CONTENTS ARDUINO EDUCATION
THE ARDUINO ENGINEERING KIT INFORMATION GUIDE ARDUINO.CC/EDUCATION Includes 1-year individual user license of: In collaboration with: INSPIRING TEACHING & EMPOWERING TABLE OF CONTENTS ARDUINO EDUCATION
Chapter 10 Digital PID
 Chapter 10 Digital PID Chapter 10 Digital PID control Goals To show how PID control can be implemented in a digital computer program To deliver a template for a PID controller that you can implement yourself
Chapter 10 Digital PID Chapter 10 Digital PID control Goals To show how PID control can be implemented in a digital computer program To deliver a template for a PID controller that you can implement yourself
Hydraulic Actuator Control Using an Multi-Purpose Electronic Interface Card
 Hydraulic Actuator Control Using an Multi-Purpose Electronic Interface Card N. KORONEOS, G. DIKEAKOS, D. PAPACHRISTOS Department of Automation Technological Educational Institution of Halkida Psaxna 34400,
Hydraulic Actuator Control Using an Multi-Purpose Electronic Interface Card N. KORONEOS, G. DIKEAKOS, D. PAPACHRISTOS Department of Automation Technological Educational Institution of Halkida Psaxna 34400,
SELF BALANCING ROBOT. Article. 2 authors, including: Nabil Lathiff Microsoft
 See discussions, stats, and author profiles for this publication at: https://www.researchgate.net/publication/265227587 SELF BALANCING ROBOT Article CITATIONS 2 READS 7,256 2 authors, including: Nabil
See discussions, stats, and author profiles for this publication at: https://www.researchgate.net/publication/265227587 SELF BALANCING ROBOT Article CITATIONS 2 READS 7,256 2 authors, including: Nabil
Design and Implementation of Self-Tuning Fuzzy-PID Controller for Process Liquid Level Control
 Design and Implementation of Self-Tuning Fuzzy-PID Controller for Process Liquid Level Control 1 Deepa Shivshant Bhandare, 2 Hafiz Shaikh and 3 N. R. Kulkarni 1,2,3 Department of Electrical Engineering,
Design and Implementation of Self-Tuning Fuzzy-PID Controller for Process Liquid Level Control 1 Deepa Shivshant Bhandare, 2 Hafiz Shaikh and 3 N. R. Kulkarni 1,2,3 Department of Electrical Engineering,
ADJUSTMENT OF PARAMETERS OF PID CONTROLLER USING FUZZY TOOL FOR SPEED CONTROL OF DC MOTOR
 ADJUSTMENT OF PARAMETERS OF PID CONTROLLER USING FUZZY TOOL FOR SPEED CONTROL OF DC MOTOR Raman Chetal 1, Divya Gupta 2 1 Department of Electrical Engineering,Baba Banda Singh Bahadur Engineering College,
ADJUSTMENT OF PARAMETERS OF PID CONTROLLER USING FUZZY TOOL FOR SPEED CONTROL OF DC MOTOR Raman Chetal 1, Divya Gupta 2 1 Department of Electrical Engineering,Baba Banda Singh Bahadur Engineering College,
DESIGN & FABRICATION OF UAV FOR DATA TRANSMISSION. Department of ME, CUET, Bangladesh
 Proceedings of the International Conference on Mechanical Engineering and Renewable Energy 2017 (ICMERE2017) 18 20 December, 2017, Chittagong, Bangladesh ICMERE2017-PI-177 DESIGN & FABRICATION OF UAV FOR
Proceedings of the International Conference on Mechanical Engineering and Renewable Energy 2017 (ICMERE2017) 18 20 December, 2017, Chittagong, Bangladesh ICMERE2017-PI-177 DESIGN & FABRICATION OF UAV FOR
ME 5281 Fall Homework 8 Due: Wed. Nov. 4th; start of class.
 ME 5281 Fall 215 Homework 8 Due: Wed. Nov. 4th; start of class. Reading: Chapter 1 Part A: Warm Up Problems w/ Solutions (graded 4%): A.1 Non-Minimum Phase Consider the following variations of a system:
ME 5281 Fall 215 Homework 8 Due: Wed. Nov. 4th; start of class. Reading: Chapter 1 Part A: Warm Up Problems w/ Solutions (graded 4%): A.1 Non-Minimum Phase Consider the following variations of a system:
OBSTACLE DETECTION AND COLLISION AVOIDANCE USING ULTRASONIC DISTANCE SENSORS FOR AN AUTONOMOUS QUADROCOPTER
 OBSTACLE DETECTION AND COLLISION AVOIDANCE USING ULTRASONIC DISTANCE SENSORS FOR AN AUTONOMOUS QUADROCOPTER Nils Gageik, Thilo Müller, Sergio Montenegro University of Würzburg, Aerospace Information Technology
OBSTACLE DETECTION AND COLLISION AVOIDANCE USING ULTRASONIC DISTANCE SENSORS FOR AN AUTONOMOUS QUADROCOPTER Nils Gageik, Thilo Müller, Sergio Montenegro University of Würzburg, Aerospace Information Technology
Experiment Of Speed Control for an Electric Trishaw Based on PID Control Algorithm
 International Journal of Mechanical & Mechatronics Engineering IJMME-IJENS Vol:17 No:02 38 Experiment Of Speed Control for an Electric Trishaw Based on PID Control Algorithm Shahrizal Saat 1 *, Mohd Nabil
International Journal of Mechanical & Mechatronics Engineering IJMME-IJENS Vol:17 No:02 38 Experiment Of Speed Control for an Electric Trishaw Based on PID Control Algorithm Shahrizal Saat 1 *, Mohd Nabil
Nautical Autonomous System with Task Integration (Code name)
") Nautical Autonomous System with Task Integration (Code name) NASTI 10/6/11 Team NASTI: Senior Students: Terry Max Christy, Jeremy Borgman Advisors: Nick Schmidt, Dr. Gary Dempsey Introduction The Nautical
Nautical Autonomous System with Task Integration (Code name) NASTI 10/6/11 Team NASTI: Senior Students: Terry Max Christy, Jeremy Borgman Advisors: Nick Schmidt, Dr. Gary Dempsey Introduction The Nautical
Simulation of Synchronous Machine in Stability Study for Power System: Garri Station as a Case Study
 Simulation of Synchronous Machine in Stability Study for Power System: Garri Station as a Case Study Bahar A. Elmahi. Industrial Research & Consultancy Center, baharelmahi@yahoo.com Abstract- This paper
Simulation of Synchronous Machine in Stability Study for Power System: Garri Station as a Case Study Bahar A. Elmahi. Industrial Research & Consultancy Center, baharelmahi@yahoo.com Abstract- This paper
3DM -CV5-10 LORD DATASHEET. Inertial Measurement Unit (IMU) Product Highlights. Features and Benefits. Applications. Best in Class Performance
 Product Highlights. Features and Benefits. Applications. Best in Class Performance") LORD DATASHEET 3DM -CV5-10 Inertial Measurement Unit (IMU) Product Highlights Triaxial accelerometer, gyroscope, and sensors achieve the optimal combination of measurement qualities Smallest, lightest,
LORD DATASHEET 3DM -CV5-10 Inertial Measurement Unit (IMU) Product Highlights Triaxial accelerometer, gyroscope, and sensors achieve the optimal combination of measurement qualities Smallest, lightest,
EEL 4665/5666 Intelligent Machines Design Laboratory. Messenger. Final Report. Date: 4/22/14 Name: Revant shah
 EEL 4665/5666 Intelligent Machines Design Laboratory Messenger Final Report Date: 4/22/14 Name: Revant shah E-Mail:revantshah2000@ufl.edu Instructors: Dr. A. Antonio Arroyo Dr. Eric M. Schwartz TAs: Andy
EEL 4665/5666 Intelligent Machines Design Laboratory Messenger Final Report Date: 4/22/14 Name: Revant shah E-Mail:revantshah2000@ufl.edu Instructors: Dr. A. Antonio Arroyo Dr. Eric M. Schwartz TAs: Andy
Hardware in the Loop Simulation for Unmanned Aerial Vehicles
 NATIONAL 1 AEROSPACE LABORATORIES BANGALORE-560 017 INDIA CSIR-NAL Hardware in the Loop Simulation for Unmanned Aerial Vehicles Shikha Jain Kamali C Scientist, Flight Mechanics and Control Division National
NATIONAL 1 AEROSPACE LABORATORIES BANGALORE-560 017 INDIA CSIR-NAL Hardware in the Loop Simulation for Unmanned Aerial Vehicles Shikha Jain Kamali C Scientist, Flight Mechanics and Control Division National
Lab 23 Microcomputer-Based Motor Controller
 Lab 23 Microcomputer-Based Motor Controller Page 23.1 Lab 23 Microcomputer-Based Motor Controller This laboratory assignment accompanies the book, Embedded Microcomputer Systems: Real Time Interfacing,
Lab 23 Microcomputer-Based Motor Controller Page 23.1 Lab 23 Microcomputer-Based Motor Controller This laboratory assignment accompanies the book, Embedded Microcomputer Systems: Real Time Interfacing,
INSTRUCTIONS. 3DR Plane CONTENTS. Thank you for purchasing a 3DR Plane!
 DR Plane INSTRUCTIONS Thank you for purchasing a DR Plane! CONTENTS 1 1 Fuselage Right wing Left wing Horizontal stabilizer Vertical stabilizer Carbon fiber bar 1 1 1 7 8 10 11 1 Audio/video (AV) cable
DR Plane INSTRUCTIONS Thank you for purchasing a DR Plane! CONTENTS 1 1 Fuselage Right wing Left wing Horizontal stabilizer Vertical stabilizer Carbon fiber bar 1 1 1 7 8 10 11 1 Audio/video (AV) cable
Development of ERAU Raven II Quad-Rotor System for the International Aerial Robotics Competition 2015
 Development of ERAU Raven II Quad-Rotor System for the International Aerial Robotics Competition 2015 Grady Delp, Nick Middlebrooks Embry-Riddle Aeronautical University Daytona Beach, FL Abstract The Embry-Riddle
Development of ERAU Raven II Quad-Rotor System for the International Aerial Robotics Competition 2015 Grady Delp, Nick Middlebrooks Embry-Riddle Aeronautical University Daytona Beach, FL Abstract The Embry-Riddle
Review Paper on Comparison of various PID Controllers Tuning Methodologies for Heat Exchanger Model
 Review Paper on Comparison of various PID Controllers Tuning Methodologies for Heat Exchanger Model Sumit 1, Ms. Kajal 2 1 Student, Department of Electrical Engineering, R.N College of Engineering, Rohtak,
Review Paper on Comparison of various PID Controllers Tuning Methodologies for Heat Exchanger Model Sumit 1, Ms. Kajal 2 1 Student, Department of Electrical Engineering, R.N College of Engineering, Rohtak,
Inertial Sensors. Ellipse Series MINIATURE HIGH PERFORMANCE. Navigation, Motion & Heave Sensing IMU AHRS MRU INS VG
 Ellipse Series MINIATURE HIGH PERFORMANCE Inertial Sensors IMU AHRS MRU INS VG ITAR Free 0.2 RMS Navigation, Motion & Heave Sensing ELLIPSE SERIES sets up new standard for miniature and cost-effective
Ellipse Series MINIATURE HIGH PERFORMANCE Inertial Sensors IMU AHRS MRU INS VG ITAR Free 0.2 RMS Navigation, Motion & Heave Sensing ELLIPSE SERIES sets up new standard for miniature and cost-effective
A New Perspective to Altitude Acquire-and- Hold for Fixed Wing UAVs
 Student Research Paper Conference Vol-1, No-1, Aug 2014 A New Perspective to Altitude Acquire-and- Hold for Fixed Wing UAVs Mansoor Ahsan Avionics Department, CAE NUST Risalpur, Pakistan mahsan@cae.nust.edu.pk
Student Research Paper Conference Vol-1, No-1, Aug 2014 A New Perspective to Altitude Acquire-and- Hold for Fixed Wing UAVs Mansoor Ahsan Avionics Department, CAE NUST Risalpur, Pakistan mahsan@cae.nust.edu.pk
International Journal of Scientific & Engineering Research, Volume 8, Issue 1, January ISSN
 International Journal of Scientific & Engineering Research, Volume 8, Issue 1, January-2017 500 DESIGN AND FABRICATION OF VOICE CONTROLLED UNMANNED AERIAL VEHICLE Author-Shubham Maindarkar, Co-author-
International Journal of Scientific & Engineering Research, Volume 8, Issue 1, January-2017 500 DESIGN AND FABRICATION OF VOICE CONTROLLED UNMANNED AERIAL VEHICLE Author-Shubham Maindarkar, Co-author-
Formation Flying Blimps Project. AA449 Milestone Report 4
 Formation Flying Blimps Project AA449 Milestone Report 4 Beth Boardman Linh Bui Kyle Odland Matthew Walker Maggie Friday, May 7 2010 Introduction This report will discuss the current state of the Formation
Formation Flying Blimps Project AA449 Milestone Report 4 Beth Boardman Linh Bui Kyle Odland Matthew Walker Maggie Friday, May 7 2010 Introduction This report will discuss the current state of the Formation
Dynamically Adaptive Inverted Pendulum Platfom
 Dynamically Adaptive Inverted Pendulum Platfom 2009 Colorado Space Grant Symposium Jonathon Cox Colorado State University Undergraduate in Electrical Engineering Email: csutke@gmail.com Web: www.campusaudio.com
Dynamically Adaptive Inverted Pendulum Platfom 2009 Colorado Space Grant Symposium Jonathon Cox Colorado State University Undergraduate in Electrical Engineering Email: csutke@gmail.com Web: www.campusaudio.com
Adaptive Fuzzy Control of Quadrotor
 Rochester Institute of Technology RIT Scholar Works Theses Thesis/Dissertation Collections 2017 Adaptive Fuzzy Control of Quadrotor Muhammad Awais Sattar mxs5932@rit.edu Follow this and additional works
Rochester Institute of Technology RIT Scholar Works Theses Thesis/Dissertation Collections 2017 Adaptive Fuzzy Control of Quadrotor Muhammad Awais Sattar mxs5932@rit.edu Follow this and additional works
GPS-Aided INS Datasheet Rev. 3.0
 1 GPS-Aided INS The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined GPS, GLONASS, GALILEO, QZSS, BEIDOU and L-Band navigation
1 GPS-Aided INS The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined GPS, GLONASS, GALILEO, QZSS, BEIDOU and L-Band navigation
U-Pilot can fly the aircraft using waypoint navigation, even when the GPS signal has been lost by using dead-reckoning navigation. Can also orbit arou
 We offer a complete solution for a user that need to put a payload in a advanced position at low cost completely designed by the Spanish company Airelectronics. Using a standard computer, the user can
We offer a complete solution for a user that need to put a payload in a advanced position at low cost completely designed by the Spanish company Airelectronics. Using a standard computer, the user can
Hardware Implementation of Fuzzy Logic using VHDL. Vikas Kumar Sharma Supervisor : Prof. Laurent Cabaret and Prof. Celine Hudelot July 23, 2007
 Hardware Implementation of Fuzzy Logic using VHDL Vikas Kumar Sharma Supervisor : Prof. Laurent Cabaret and Prof. Celine Hudelot July 23, 2007 Abstract In this project, we propose a Fuzzy Logic approach
Hardware Implementation of Fuzzy Logic using VHDL Vikas Kumar Sharma Supervisor : Prof. Laurent Cabaret and Prof. Celine Hudelot July 23, 2007 Abstract In this project, we propose a Fuzzy Logic approach
AG-VA Fully Autonomous UAV Sprayers
 AG-VA Fully Autonomous UAV Sprayers One of the most advance sprayer technology on the market! Best Price - Best Flight Time - Best Coverage Rate - 1 Yr Warranty* The AG-VA UAV Sprayer is available in 3
AG-VA Fully Autonomous UAV Sprayers One of the most advance sprayer technology on the market! Best Price - Best Flight Time - Best Coverage Rate - 1 Yr Warranty* The AG-VA UAV Sprayer is available in 3