U-Pilot can fly the aircraft using waypoint navigation, even when the GPS signal has been lost by using dead-reckoning navigation. Can also orbit arou
|
|
|
- Jessica Lorraine McCarthy
- 5 years ago
- Views:
Transcription

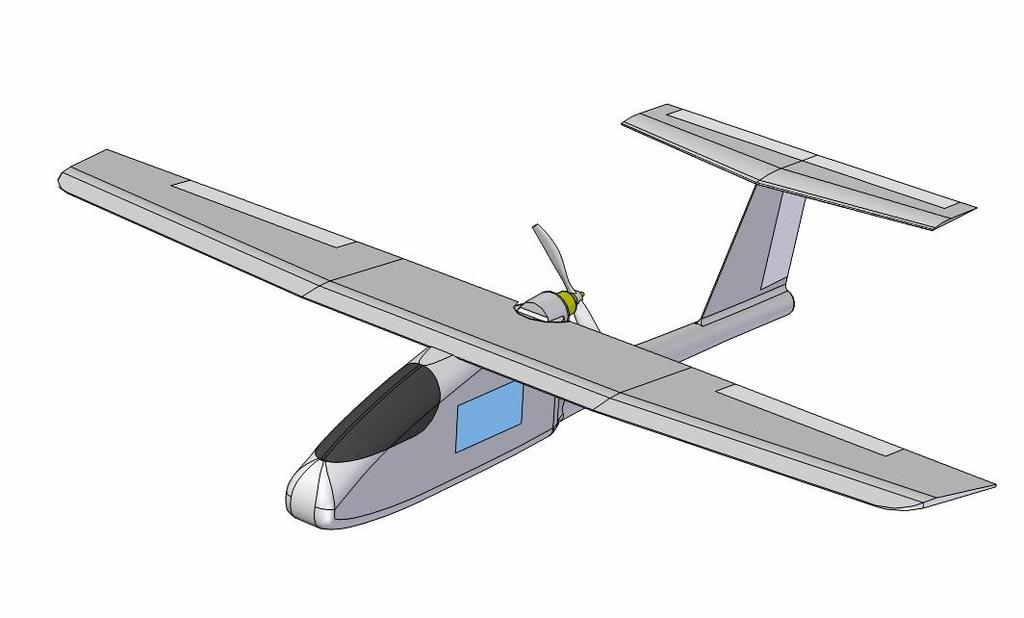
1 We offer a complete solution for a user that need to put a payload in a advanced position at low cost completely designed by the Spanish company Airelectronics. Using a standard computer, the user can plan, fly and modify the UAV mission in real time in the easiest possible way thanks to the U-Pilot flight control system and the U-See ground station software. The operator doesn't need any previous flight experience and it is not even necessary to have a manual joystick because the system can fly 100% in automatic mode: from the take-off to the landing. In case of a communications problem the plane will came back home and land safely. The plane is based in COTS materials (Commercial off-the-shelf) and has been adapted to became a complete UAV. Due to the fact than the plane has been built using composites and EPO its weight is really low (1.3 kg without the payload) it is really easy to hand launch it and to land it: any operator can do it, even without any previous skill, and it will land on its fuselage without big damage in almost any terrain. Payload weight can be up to 1.2 kg giving to the system a really good payload weight / total weight relationship. The use of EPO, a material that comes from the elapor, reduces weight and makes the integration of the payload an easy task. It is an incredible easy to work material. It also has "shape memory": in case of a crash the material will deform itself and will came back to its original shape. After long optimization tests done on the field by Airelectronics the best engine-propeller relationship has been selected and special engine control law has been designed archiving the best possible endurance. The brain for the plane is the Airelectronics' U-Pilot flight control system, which is embedded inside the plane's fuselage, leaving a lot of space on board to install a payload. Being based in FPGA technology, U-Pilot's configurability and flexibility is unsurpassed and the advanced sensor mixture using extended Kalman filtering assures an optimal attitude and navigation control. It can be adapted to control any payload you want, and has camera control capabilities already built-in, including geo-reference of a camera image.

. This way it gains flight time and extends its range. This gives almost unlimited loiter time over a forest fire.")
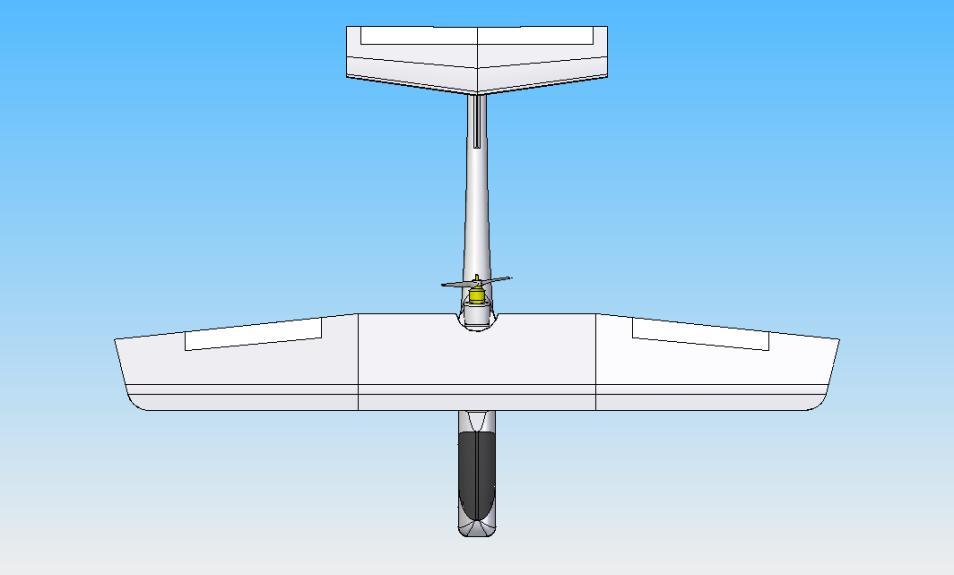
2 U-Pilot can fly the aircraft using waypoint navigation, even when the GPS signal has been lost by using dead-reckoning navigation. Can also orbit around a ground location and can fly directly towards a map clicked location. Its control laws has been optimized for the control of the electric motor the UAV Skywalker uses, having automatic modes that take advantage of the energy present in the atmosphere: The plane has capability to climb taking advantage of the convective activity (thermal soaring). This way it gains flight time and extends its range. This gives almost unlimited loiter time over a forest fire. The UAV Skywalker is available in the basic and Pro versions, providing the latter some additional features that are useful in some applications. The electronics inside the Skywalker Pro have sensor redundancy, meanwhile the plane has a belly protection that reduces the damage absorbed by the hull when landing in hard environments. The Skywalker Pro features a new Li-Ion Battery that doubles the standard Skywalker endurance and allows the plane to perform a high slope takeoff, recommended when working in areas with obstacles. To allow landing in these areas, the Pro version also has spoilers that allow the plane to land within a few meters. A landing and takeoff slope diagram can be found at the end of this document.
3 H i g h l i g h ts Thermal Soaring Fully autonomous Multi-Payload Take advantage of the atmosphere energy No human intervention required during flight The plane can accomodate a great number of payloads Affordable Hull renovation Bat. monitoring Unlike other solutions, the prices are reasonable We will supply you a new hull free of charge if yours is damaged Real time battery monitoring assures that you won't loose the aircraft due to overuse Flight-Plan Camera geo-reference Real-Time Video Feed Using a video transmitter you can receive real-time the video feed Automatic flight plan following allows to complete unattended missions The system can give geo-referenced images Po s s i b l e A p p l i c a t i o n s Border control Survillance in terrestrial and maritime borders Police Usage Agriculture Fire Fighting Military Demonstration control, anti-drug operations Status of crops, Forest mass control, study of soil Monitor Active fires, avoid reactivation of controlled fires Forward observer, over the hill recon missions

4
5 F l i g h t c o n t r o l S p e c i fi c a t i o n Flight control Attitude Estimation & control Hz rate Flight-plan... Up to 200 way-points Speed Control... Auto-throttle Take-Off & Landing... Automatic GPS Positioning SBAS... Global coverage Differential navigation... available on request Interface with Payloads & Actuators PWM & GPIO outputs...30 PWM rate... Configurable RS-232 ports... 4 RS-232 compliant ports RS-232 Rates bps External ADC channels...3 channel 12bit V Main Voltage supply supervisor Telemetry Data-Link Frequency...900MHz/1.4 Ghz/2.4GHz Power... 1 W Range km / 80km / 40 km baud rate bps Air Data System Dynamic pressure sensor range km/h Static pressure, low altitude option m Static pressure, high altitude option m Cammera Control Protocols... VISCA, Controp & PWM... Other protocols upon request Camera modes... Geo-Pointed, Stable, Manual M i n i m u m H a r d w a r e fo r C o n tr o l C o m p u te r The recommended hardware is the MacBook Pro 13 with BootCamp and Microsoft Windows 7. OS... Windows or Linux Processor... Intel Core i5 RAM... 2GB Hard drive... 5 free Gb Video Card...OpenGL supported Screen... at least 13" Ports...1 RS-232 port... (native or through USB adaptor) Pl a n e S p e c i f i c a t i o n Dimensions Length mm Wing Span mm/1880mm...(two Options available) Payload Bay cm3 Weights Empty Weight...1,3 kg. Maximum Take-Off Weight... 3,0 kg. Endurance 5000 mah battery option min minimum mah battery option...1 hour minimum Long Endurance battery option... Up to 2.7 hours Typical Crusing speed km/h
The brain for the plane is the Airelectronics' U-Pilot flight control system, which is embedded inside the plane's fuselage, leaving a lot of space on
 Airelectronics has developed a new complete solution meeting the needs of the farming science. The completely test Skywalkerplatform has been equipped with both thermal and multispectral cameras to measure
Airelectronics has developed a new complete solution meeting the needs of the farming science. The completely test Skywalkerplatform has been equipped with both thermal and multispectral cameras to measure
Classical Control Based Autopilot Design Using PC/104
 Classical Control Based Autopilot Design Using PC/104 Mohammed A. Elsadig, Alneelain University, Dr. Mohammed A. Hussien, Alneelain University. Abstract Many recent papers have been written in unmanned
Classical Control Based Autopilot Design Using PC/104 Mohammed A. Elsadig, Alneelain University, Dr. Mohammed A. Hussien, Alneelain University. Abstract Many recent papers have been written in unmanned
INSTRUCTIONS. 3DR Plane CONTENTS. Thank you for purchasing a 3DR Plane!
 DR Plane INSTRUCTIONS Thank you for purchasing a DR Plane! CONTENTS 1 1 Fuselage Right wing Left wing Horizontal stabilizer Vertical stabilizer Carbon fiber bar 1 1 1 7 8 10 11 1 Audio/video (AV) cable
DR Plane INSTRUCTIONS Thank you for purchasing a DR Plane! CONTENTS 1 1 Fuselage Right wing Left wing Horizontal stabilizer Vertical stabilizer Carbon fiber bar 1 1 1 7 8 10 11 1 Audio/video (AV) cable
AG-VA Fully Autonomous UAV Sprayers
 AG-VA Fully Autonomous UAV Sprayers One of the most advance sprayer technology on the market! Best Price - Best Flight Time - Best Coverage Rate - 1 Yr Warranty* The AG-VA UAV Sprayer is available in 3
AG-VA Fully Autonomous UAV Sprayers One of the most advance sprayer technology on the market! Best Price - Best Flight Time - Best Coverage Rate - 1 Yr Warranty* The AG-VA UAV Sprayer is available in 3
The drone for precision agriculture
 The drone for precision agriculture Reap the benefits of scouting crops from above If precision technology has driven the farming revolution of recent years, monitoring crops from the sky will drive the
The drone for precision agriculture Reap the benefits of scouting crops from above If precision technology has driven the farming revolution of recent years, monitoring crops from the sky will drive the
The survey-grade mapping drone
 The survey-grade mapping drone 3 reasons to choose the ebee RTK 01. Survey-grade accuracy Absolute orthomosaic / Digital Elevation Model accuracy of down to 3 cm (1.2 in) without the need for GCPs meaning
The survey-grade mapping drone 3 reasons to choose the ebee RTK 01. Survey-grade accuracy Absolute orthomosaic / Digital Elevation Model accuracy of down to 3 cm (1.2 in) without the need for GCPs meaning
University of Minnesota. Department of Aerospace Engineering & Mechanics. UAV Research Group
 University of Minnesota Department of Aerospace Engineering & Mechanics UAV Research Group Paw Yew Chai March 23, 2009 CONTENTS Contents 1 Background 3 1.1 Research Area............................. 3
University of Minnesota Department of Aerospace Engineering & Mechanics UAV Research Group Paw Yew Chai March 23, 2009 CONTENTS Contents 1 Background 3 1.1 Research Area............................. 3
MULTIPURPOSE QUADCOPTER SOLUTION FOR AGRICULTURE
 MULTIPURPOSE QUADCOPTER SOLUTION FOR AGRICULTURE Powered by COVERS UP TO 30HA AT 70M FLIGHT ALTITUDE PER BATTERY PHOTO & VIDEO FULL HD 1080P - 14MP 3-AXIS STABILIZATION INCLUDES NDVI & ZONING MAPS SERVICE
MULTIPURPOSE QUADCOPTER SOLUTION FOR AGRICULTURE Powered by COVERS UP TO 30HA AT 70M FLIGHT ALTITUDE PER BATTERY PHOTO & VIDEO FULL HD 1080P - 14MP 3-AXIS STABILIZATION INCLUDES NDVI & ZONING MAPS SERVICE
Skylark OSD V4.0 USER MANUAL
 Skylark OSD V4.0 USER MANUAL A skylark soars above the clouds. SKYLARK OSD V4.0 USER MANUAL New generation of Skylark OSD is developed for the FPV (First Person View) enthusiasts. SKYLARK OSD V4.0 is equipped
Skylark OSD V4.0 USER MANUAL A skylark soars above the clouds. SKYLARK OSD V4.0 USER MANUAL New generation of Skylark OSD is developed for the FPV (First Person View) enthusiasts. SKYLARK OSD V4.0 is equipped
FLCS V2.1. AHRS, Autopilot, Gyro Stabilized Gimbals Control, Ground Control Station
 AHRS, Autopilot, Gyro Stabilized Gimbals Control, Ground Control Station The platform provides a high performance basis for electromechanical system control. Originally designed for autonomous aerial vehicle
AHRS, Autopilot, Gyro Stabilized Gimbals Control, Ground Control Station The platform provides a high performance basis for electromechanical system control. Originally designed for autonomous aerial vehicle
VCU Skyline. Team Members: Project Advisor: Dr. Robert Klenke. Last Modified May 13, 2004 VCU SKYLINE 1
 VCU Skyline Last Modified May 13, 2004 Team Members: Abhishek Handa Kevin Van Brittiany Wynne Jeffrey E. Quiñones Project Advisor: Dr. Robert Klenke VCU SKYLINE 1 * Table of Contents I. Abstract... 3 II.
VCU Skyline Last Modified May 13, 2004 Team Members: Abhishek Handa Kevin Van Brittiany Wynne Jeffrey E. Quiñones Project Advisor: Dr. Robert Klenke VCU SKYLINE 1 * Table of Contents I. Abstract... 3 II.
DISCO-PRO AG ALL-IN-ONE DRONE SOLUTION FOR PRECISION AGRICULTURE. 80ha COVERAGE PARROT SEQUOIA INCLUDES MULTI-PURPOSE TOOL SAFE ANALYZE & DECIDE
 DISCO-PRO AG ALL-IN-ONE DRONE SOLUTION FOR PRECISION AGRICULTURE Powered by 80ha COVERAGE AT 120M * FLIGHT ALTITUDE (200AC @ 400FT) MULTI-PURPOSE TOOL PHOTO 14MPX VIDEO 1080P FULL HD PARROT SEQUOIA RGB
DISCO-PRO AG ALL-IN-ONE DRONE SOLUTION FOR PRECISION AGRICULTURE Powered by 80ha COVERAGE AT 120M * FLIGHT ALTITUDE (200AC @ 400FT) MULTI-PURPOSE TOOL PHOTO 14MPX VIDEO 1080P FULL HD PARROT SEQUOIA RGB
SPACE. (Some space topics are also listed under Mechatronic topics)
") SPACE (Some space topics are also listed under Mechatronic topics) Dr Xiaofeng Wu Rm N314, Bldg J11; ph. 9036 7053, Xiaofeng.wu@sydney.edu.au Part I SPACE ENGINEERING 1. Vision based satellite formation
SPACE (Some space topics are also listed under Mechatronic topics) Dr Xiaofeng Wu Rm N314, Bldg J11; ph. 9036 7053, Xiaofeng.wu@sydney.edu.au Part I SPACE ENGINEERING 1. Vision based satellite formation
SLX-1 Multi-Application GNSS Receiver
 SLX-1 Multi-Application GNSS Receiver w w w.sa tla b g p s. c o m SLX-1 Multi-Application GNSS Receiver Designed for CORS Ready for Anything European Standards GPS GLONASS BEIDOU GALILEO SBAS QZSS Long
SLX-1 Multi-Application GNSS Receiver w w w.sa tla b g p s. c o m SLX-1 Multi-Application GNSS Receiver Designed for CORS Ready for Anything European Standards GPS GLONASS BEIDOU GALILEO SBAS QZSS Long
SMART COMMUNICATION SATELLITE (SCS) PROJECT OVERVIEW. Jin JIN Space Center, Tsinghua University 2015/8/10
 PROJECT OVERVIEW. Jin JIN Space Center, Tsinghua University 2015/8/10") SMART COMMUNICATION SATELLITE (SCS) PROJECT OVERVIEW Jin JIN Space Center, Tsinghua University 2015/8/10 OUTLINE Overview System Scheme Technical Challenges Flight Results Future 2 1 Overview Tsinghua
SMART COMMUNICATION SATELLITE (SCS) PROJECT OVERVIEW Jin JIN Space Center, Tsinghua University 2015/8/10 OUTLINE Overview System Scheme Technical Challenges Flight Results Future 2 1 Overview Tsinghua
Study of M.A.R.S. (Multifunctional Aero-drone for Remote Surveillance)
") Study of M.A.R.S. (Multifunctional Aero-drone for Remote Surveillance) Supriya Bhuran 1, Rohit V. Agrawal 2, Kiran D. Bombe 2, Somiran T. Karmakar 2, Ninad V. Bapat 2 1 Assistant Professor, Dept. Instrumentation,
Study of M.A.R.S. (Multifunctional Aero-drone for Remote Surveillance) Supriya Bhuran 1, Rohit V. Agrawal 2, Kiran D. Bombe 2, Somiran T. Karmakar 2, Ninad V. Bapat 2 1 Assistant Professor, Dept. Instrumentation,
Hardware in the Loop Simulation for Unmanned Aerial Vehicles
 NATIONAL 1 AEROSPACE LABORATORIES BANGALORE-560 017 INDIA CSIR-NAL Hardware in the Loop Simulation for Unmanned Aerial Vehicles Shikha Jain Kamali C Scientist, Flight Mechanics and Control Division National
NATIONAL 1 AEROSPACE LABORATORIES BANGALORE-560 017 INDIA CSIR-NAL Hardware in the Loop Simulation for Unmanned Aerial Vehicles Shikha Jain Kamali C Scientist, Flight Mechanics and Control Division National
Hardware Modeling and Machining for UAV- Based Wideband Radar
 Hardware Modeling and Machining for UAV- Based Wideband Radar By Ryan Tubbs Abstract The Center for Remote Sensing of Ice Sheets (CReSIS) at the University of Kansas is currently implementing wideband
Hardware Modeling and Machining for UAV- Based Wideband Radar By Ryan Tubbs Abstract The Center for Remote Sensing of Ice Sheets (CReSIS) at the University of Kansas is currently implementing wideband
New functions and changes summary
 New functions and changes summary A comparison of PitLab & Zbig FPV System versions 2.50 and 2.40 Table of Contents New features...2 OSD and autopilot...2 Navigation modes...2 Routes...2 Takeoff...2 Automatic
New functions and changes summary A comparison of PitLab & Zbig FPV System versions 2.50 and 2.40 Table of Contents New features...2 OSD and autopilot...2 Navigation modes...2 Routes...2 Takeoff...2 Automatic
Heterogeneous Control of Small Size Unmanned Aerial Vehicles
 Magyar Kutatók 10. Nemzetközi Szimpóziuma 10 th International Symposium of Hungarian Researchers on Computational Intelligence and Informatics Heterogeneous Control of Small Size Unmanned Aerial Vehicles
Magyar Kutatók 10. Nemzetközi Szimpóziuma 10 th International Symposium of Hungarian Researchers on Computational Intelligence and Informatics Heterogeneous Control of Small Size Unmanned Aerial Vehicles
The Next Generation Design of Autonomous MAV Flight Control System SmartAP
 The Next Generation Design of Autonomous MAV Flight Control System SmartAP Kirill Shilov Department of Aeromechanics and Flight Engineering Moscow Institute of Physics and Technology 16 Gagarina st, Zhukovsky,
The Next Generation Design of Autonomous MAV Flight Control System SmartAP Kirill Shilov Department of Aeromechanics and Flight Engineering Moscow Institute of Physics and Technology 16 Gagarina st, Zhukovsky,
Air Surveillance Drones. ENSC 305/440 Capstone Project Spring 2014
 Air Surveillance Drones ENSC 305/440 Capstone Project Spring 2014 Group Members: Armin Samadanian Chief Executive Officer Juan Carlos Diaz Lead Technician and Test Pilot Afshin Nikzat Lead Financial Planner
Air Surveillance Drones ENSC 305/440 Capstone Project Spring 2014 Group Members: Armin Samadanian Chief Executive Officer Juan Carlos Diaz Lead Technician and Test Pilot Afshin Nikzat Lead Financial Planner
FOXTECH Nimbus VTOL. User Manual V1.1
 FOXTECH Nimbus VTOL User Manual V1.1 2018.01 Contents Specifications Basic Theory Introduction Setup and Calibration Assembly Control Surface Calibration Compass and Airspeed Calibration Test Flight Autopilot
FOXTECH Nimbus VTOL User Manual V1.1 2018.01 Contents Specifications Basic Theory Introduction Setup and Calibration Assembly Control Surface Calibration Compass and Airspeed Calibration Test Flight Autopilot
REMOTE AUTONOMOUS MAPPING OF RADIO FREQUENCY OBSTRUCTION DEVICES
 REMOTE AUTONOMOUS MAPPING OF RADIO FREQUENCY OBSTRUCTION DEVICES Team: Jorgen Baertsch, Ian Cooke, Kennedy Harrmann, Mary Landis, Sarah Larson, Harrison Mast, Ethan Morgan, Selby Stout, Jake Ursetta, Justin
REMOTE AUTONOMOUS MAPPING OF RADIO FREQUENCY OBSTRUCTION DEVICES Team: Jorgen Baertsch, Ian Cooke, Kennedy Harrmann, Mary Landis, Sarah Larson, Harrison Mast, Ethan Morgan, Selby Stout, Jake Ursetta, Justin
GPS System Design and Control Modeling. Chua Shyan Jin, Ronald. Assoc. Prof Gerard Leng. Aeronautical Engineering Group, NUS
 GPS System Design and Control Modeling Chua Shyan Jin, Ronald Assoc. Prof Gerard Leng Aeronautical Engineering Group, NUS Abstract A GPS system for the autonomous navigation and surveillance of an airship
GPS System Design and Control Modeling Chua Shyan Jin, Ronald Assoc. Prof Gerard Leng Aeronautical Engineering Group, NUS Abstract A GPS system for the autonomous navigation and surveillance of an airship
Baumanets student micro-satellite
 Baumanets student micro-satellite Presentation at UNIVERSAT 2006 International Symposium June 28, 2006 Moscow, Russia Victoria Mayorova Director of Youth Space Center of Bauman Moscow State Technical University
Baumanets student micro-satellite Presentation at UNIVERSAT 2006 International Symposium June 28, 2006 Moscow, Russia Victoria Mayorova Director of Youth Space Center of Bauman Moscow State Technical University
Height Limited Switch
 Height Limited Switch Manual version: 1.0 Content Introduction...3 How it works...3 Key features...3 Hardware...4 Motor cut-off settings...4 Specification...4 Using the RC HLS #1 module...5 Powering the
Height Limited Switch Manual version: 1.0 Content Introduction...3 How it works...3 Key features...3 Hardware...4 Motor cut-off settings...4 Specification...4 Using the RC HLS #1 module...5 Powering the
EEL 4665/5666 Intelligent Machines Design Laboratory. Messenger. Final Report. Date: 4/22/14 Name: Revant shah
 EEL 4665/5666 Intelligent Machines Design Laboratory Messenger Final Report Date: 4/22/14 Name: Revant shah E-Mail:revantshah2000@ufl.edu Instructors: Dr. A. Antonio Arroyo Dr. Eric M. Schwartz TAs: Andy
EEL 4665/5666 Intelligent Machines Design Laboratory Messenger Final Report Date: 4/22/14 Name: Revant shah E-Mail:revantshah2000@ufl.edu Instructors: Dr. A. Antonio Arroyo Dr. Eric M. Schwartz TAs: Andy
Testing Autonomous Hover Algorithms Using a Quad rotor Helicopter Test Bed
 Testing Autonomous Hover Algorithms Using a Quad rotor Helicopter Test Bed In conjunction with University of Washington Distributed Space Systems Lab Justin Palm Andy Bradford Andrew Nelson Milestone One
Testing Autonomous Hover Algorithms Using a Quad rotor Helicopter Test Bed In conjunction with University of Washington Distributed Space Systems Lab Justin Palm Andy Bradford Andrew Nelson Milestone One
PEGASUS : a future tool for providing near real-time high resolution data for disaster management. Lewyckyj Nicolas
 PEGASUS : a future tool for providing near real-time high resolution data for disaster management Lewyckyj Nicolas nicolas.lewyckyj@vito.be http://www.pegasus4europe.com Overview Vito in a nutshell GI
PEGASUS : a future tool for providing near real-time high resolution data for disaster management Lewyckyj Nicolas nicolas.lewyckyj@vito.be http://www.pegasus4europe.com Overview Vito in a nutshell GI
Small Satellites: The Execution and Launch of a GPS Radio Occultation Instrument in a 6U Nanosatellite
 Small Satellites: The Execution and Launch of a GPS Radio Occultation Instrument in a 6U Nanosatellite Dave Williamson Director, Strategic Programs Tyvak Tyvak: Satellite Solutions for Multiple Organizations
Small Satellites: The Execution and Launch of a GPS Radio Occultation Instrument in a 6U Nanosatellite Dave Williamson Director, Strategic Programs Tyvak Tyvak: Satellite Solutions for Multiple Organizations
SLX-1 NG Multi-Application GNSS Receiver
 SLX-1 NG Multi-Application GNSS Receiver w w w.sa tla b g p s. c o m SLX-1 NG Multi-Application GNSS Receiver Designed for CORS Ready for Anything European Standards GPS GLONASS BEIDOU GALILEO SBAS QZSS
SLX-1 NG Multi-Application GNSS Receiver w w w.sa tla b g p s. c o m SLX-1 NG Multi-Application GNSS Receiver Designed for CORS Ready for Anything European Standards GPS GLONASS BEIDOU GALILEO SBAS QZSS
RC Altimeter #2 BASIC Altitude data recording and monitoring system 3/8/2009 Page 2 of 11
 Introduction... 3 How it works... 3 Key features... 3 System requirements... 3 Hardware... 4 Specifications... 4 Using the RC Altimeter #2 BASIC module... 5 Powering the module... 5 Mounting the module...
Introduction... 3 How it works... 3 Key features... 3 System requirements... 3 Hardware... 4 Specifications... 4 Using the RC Altimeter #2 BASIC module... 5 Powering the module... 5 Mounting the module...
Development of Microsatellite to Detect Illegal Fishing MS-SAT
 Development of Microsatellite to Detect Illegal Fishing MS-SAT Ernest S. C. P. Bintang A.S.W.A.M. Department of Aerospace Engineering Faculty of Mechanical and Aerospace Engineering Institut Teknologi
Development of Microsatellite to Detect Illegal Fishing MS-SAT Ernest S. C. P. Bintang A.S.W.A.M. Department of Aerospace Engineering Faculty of Mechanical and Aerospace Engineering Institut Teknologi
Flight control Set and Kit
 Flight control Set and Kit Quick Start Guide For MegaPirate NG Version 1.2 Thanks for choosing AirStudio flight control electronics. We have created it based on best-in-class software, hardware and our
Flight control Set and Kit Quick Start Guide For MegaPirate NG Version 1.2 Thanks for choosing AirStudio flight control electronics. We have created it based on best-in-class software, hardware and our
PARROT SKYCONTROLLER 2 PARROT COCKPITGLASSES 2 2 POWER BATTERIES
 F P V P A C K L I M I T L E S S F R E E D O M PARROT SKYCONTROLLER 2 PARROT COCKPITGLASSES 2 2 POWER BATTERIES PARROT BEBOP 2 POWER Parrot BEBOP 2 POWER is a compact drone equipped with cutting-edge technology,
F P V P A C K L I M I T L E S S F R E E D O M PARROT SKYCONTROLLER 2 PARROT COCKPITGLASSES 2 2 POWER BATTERIES PARROT BEBOP 2 POWER Parrot BEBOP 2 POWER is a compact drone equipped with cutting-edge technology,
Reaching for the Stars
 Satellite Research Centre Reaching for the Stars Kay-Soon Low Centre Director School of Electrical & Electronic Engineering Nanyang Technological University 1 Satellite Programs @SaRC 2013 2014 2015 2016
Satellite Research Centre Reaching for the Stars Kay-Soon Low Centre Director School of Electrical & Electronic Engineering Nanyang Technological University 1 Satellite Programs @SaRC 2013 2014 2015 2016
THE DEVELOPMENT OF A LOW-COST NAVIGATION SYSTEM USING GPS/RDS TECHNOLOGY
 ICAS 2 CONGRESS THE DEVELOPMENT OF A LOW-COST NAVIGATION SYSTEM USING /RDS TECHNOLOGY Yung-Ren Lin, Wen-Chi Lu, Ming-Hao Yang and Fei-Bin Hsiao Institute of Aeronautics and Astronautics, National Cheng
ICAS 2 CONGRESS THE DEVELOPMENT OF A LOW-COST NAVIGATION SYSTEM USING /RDS TECHNOLOGY Yung-Ren Lin, Wen-Chi Lu, Ming-Hao Yang and Fei-Bin Hsiao Institute of Aeronautics and Astronautics, National Cheng
Formation Flight CS 229 Project: Final Report
 Formation Flight CS 229 Project: Final Report Zouhair Mahboubi Tao Wang December 11 th, 2009 Stanford University Abstract This paper is submitted as the requirement for the final project report for the
Formation Flight CS 229 Project: Final Report Zouhair Mahboubi Tao Wang December 11 th, 2009 Stanford University Abstract This paper is submitted as the requirement for the final project report for the
IPRO 312: Unmanned Aerial Systems
 IPRO 312: Unmanned Aerial Systems Kay, Vlad, Akshay, Chris, Andrew, Sebastian, Anurag, Ani, Ivo, Roger Dr. Vural Diverse IPRO Group ECE MMAE BME ARCH CS Outline Background Approach Team Research Integration
IPRO 312: Unmanned Aerial Systems Kay, Vlad, Akshay, Chris, Andrew, Sebastian, Anurag, Ani, Ivo, Roger Dr. Vural Diverse IPRO Group ECE MMAE BME ARCH CS Outline Background Approach Team Research Integration
SDR OFDM Waveform design for a UGV/UAV communication scenario
 SDR OFDM Waveform design for a UGV/UAV communication scenario SDR 11-WInnComm-Europe Christian Blümm 22nd June 2011 Content Introduction Scenario Hardware Platform Waveform TDMA Designing and Testing Conclusion
SDR OFDM Waveform design for a UGV/UAV communication scenario SDR 11-WInnComm-Europe Christian Blümm 22nd June 2011 Content Introduction Scenario Hardware Platform Waveform TDMA Designing and Testing Conclusion
Platform Independent Launch Vehicle Avionics
 Platform Independent Launch Vehicle Avionics Small Satellite Conference Logan, Utah August 5 th, 2014 Company Introduction Founded in 2011 The Co-Founders blend Academia and Commercial Experience ~20 Employees
Platform Independent Launch Vehicle Avionics Small Satellite Conference Logan, Utah August 5 th, 2014 Company Introduction Founded in 2011 The Co-Founders blend Academia and Commercial Experience ~20 Employees
Recent Progress in the Development of On-Board Electronics for Micro Air Vehicles
 Recent Progress in the Development of On-Board Electronics for Micro Air Vehicles Jason Plew Jason Grzywna M. C. Nechyba Jason@mil.ufl.edu number9@mil.ufl.edu Nechyba@mil.ufl.edu Machine Intelligence Lab
Recent Progress in the Development of On-Board Electronics for Micro Air Vehicles Jason Plew Jason Grzywna M. C. Nechyba Jason@mil.ufl.edu number9@mil.ufl.edu Nechyba@mil.ufl.edu Machine Intelligence Lab
POSITIONING AN AUTONOMOUS OFF-ROAD VEHICLE BY USING FUSED DGPS AND INERTIAL NAVIGATION. T. Schönberg, M. Ojala, J. Suomela, A. Torpo, A.
 POSITIONING AN AUTONOMOUS OFF-ROAD VEHICLE BY USING FUSED DGPS AND INERTIAL NAVIGATION T. Schönberg, M. Ojala, J. Suomela, A. Torpo, A. Halme Helsinki University of Technology, Automation Technology Laboratory
POSITIONING AN AUTONOMOUS OFF-ROAD VEHICLE BY USING FUSED DGPS AND INERTIAL NAVIGATION T. Schönberg, M. Ojala, J. Suomela, A. Torpo, A. Halme Helsinki University of Technology, Automation Technology Laboratory
Lightweight Fixed Wing UAV
 Lightweight Fixed Wing UAV Joseph Patton, Paul Owczarczyk, Mattias Dreger, Jason Bui, Cameron Lee, Cindy Xiao, Rijesh Augustine, Sheldon Marquis, Ryan Kapteyn, Nicholas Kwan Wong, Mark Pollock, Andrew
Lightweight Fixed Wing UAV Joseph Patton, Paul Owczarczyk, Mattias Dreger, Jason Bui, Cameron Lee, Cindy Xiao, Rijesh Augustine, Sheldon Marquis, Ryan Kapteyn, Nicholas Kwan Wong, Mark Pollock, Andrew
Overview. Objectives. The ultimate goal is to compare the performance that different equipment offers us in a photogrammetric flight.
 Overview At present, one of the most commonly used technique for topographic surveys is aerial photogrammetry. This technique uses aerial images to determine the geometric properties of objects and spatial
Overview At present, one of the most commonly used technique for topographic surveys is aerial photogrammetry. This technique uses aerial images to determine the geometric properties of objects and spatial
UAV Technologies for 3D Mapping. Rolf Schaeppi Director Geospatial Solutions APAC / India
 UAV Technologies for 3D Mapping Rolf Schaeppi Director Geospatial Solutions APAC / India Some main application areas? Market situation Analyst statements billion dollars 7,3 defense market 2,5 civil market
UAV Technologies for 3D Mapping Rolf Schaeppi Director Geospatial Solutions APAC / India Some main application areas? Market situation Analyst statements billion dollars 7,3 defense market 2,5 civil market
From Single to Formation Flying CubeSats: An Update of the Delfi Programme
 From Single to Formation Flying CubeSats: An Update of the Delfi Programme Jian Guo, Jasper Bouwmeester & Eberhard Gill 1 Outline Introduction Delfi-C 3 Mission Delfi-n3Xt Mission Lessons Learned DelFFi
From Single to Formation Flying CubeSats: An Update of the Delfi Programme Jian Guo, Jasper Bouwmeester & Eberhard Gill 1 Outline Introduction Delfi-C 3 Mission Delfi-n3Xt Mission Lessons Learned DelFFi
North Carolina State University Aerial Robotics Club
 North Carolina State University Aerial Robotics Club 2007 AUVSI Student UAS Competition Journal Paper Entry June 1, 2007 by Matthew Hazard (NCSU 08) with thanks to Alan Stewart and James Scoggins NCSU
North Carolina State University Aerial Robotics Club 2007 AUVSI Student UAS Competition Journal Paper Entry June 1, 2007 by Matthew Hazard (NCSU 08) with thanks to Alan Stewart and James Scoggins NCSU
Multispectral Scanners for Wildland Fire Assessment NASA Ames Research Center Earth Science Division. Bruce Coffland U.C.
 Multispectral Scanners for Wildland Fire Assessment NASA Earth Science Division Bruce Coffland U.C. Santa Cruz Slide Fire Burn Area (MASTER/B200) R 2.2um G 0.87um B 0.65um Airborne Science & Technology
Multispectral Scanners for Wildland Fire Assessment NASA Earth Science Division Bruce Coffland U.C. Santa Cruz Slide Fire Burn Area (MASTER/B200) R 2.2um G 0.87um B 0.65um Airborne Science & Technology
SONOBOT AUTONOMOUS HYDROGRAPHIC SURVEY VEHICLE PRODUCT INFORMATION GUIDE
 SONOBOT AUTONOMOUS HYDROGRAPHIC SURVEY VEHICLE PRODUCT INFORMATION GUIDE EvoLogics Sonobot an autonomous unmanned surface vehicle for hydrographic surveys High Precision Differential GPS for high-accuracy
SONOBOT AUTONOMOUS HYDROGRAPHIC SURVEY VEHICLE PRODUCT INFORMATION GUIDE EvoLogics Sonobot an autonomous unmanned surface vehicle for hydrographic surveys High Precision Differential GPS for high-accuracy
ChRoMicro - Cheap Robotic Microhelicopter HOWTO (EN)
") ChRoMicro - Cheap Robotic Microhelicopter HOWTO (EN) Copyright 2005, 2006, 2007 pabr@pabr.org All rights reserved. RC model helicopter prices have reached a point where all sorts of challenging (i.e. crash-prone)
ChRoMicro - Cheap Robotic Microhelicopter HOWTO (EN) Copyright 2005, 2006, 2007 pabr@pabr.org All rights reserved. RC model helicopter prices have reached a point where all sorts of challenging (i.e. crash-prone)
The Evolution of Nano-Satellite Proximity Operations In-Space Inspection Workshop 2017
 The Evolution of Nano-Satellite Proximity Operations 02-01-2017 In-Space Inspection Workshop 2017 Tyvak Introduction We develop miniaturized custom spacecraft, launch solutions, and aerospace technologies
The Evolution of Nano-Satellite Proximity Operations 02-01-2017 In-Space Inspection Workshop 2017 Tyvak Introduction We develop miniaturized custom spacecraft, launch solutions, and aerospace technologies
Helicopter Aerial Laser Ranging
 Helicopter Aerial Laser Ranging Håkan Sterner TopEye AB P.O.Box 1017, SE-551 11 Jönköping, Sweden 1 Introduction Measuring distances with light has been used for terrestrial surveys since the fifties.
Helicopter Aerial Laser Ranging Håkan Sterner TopEye AB P.O.Box 1017, SE-551 11 Jönköping, Sweden 1 Introduction Measuring distances with light has been used for terrestrial surveys since the fifties.
Photomod Lite Contest 2013 Creating vegetation map using UAV at Seaside Palouki forest (Greece) by Apostolos Nteris
 by Apostolos Nteris") P r o j e c t I n f o r m a t i o n Title: Creating vegetation map using UAV at seaside Palouki forest (Greece) Author: Apostolos Nteris, Surveyor engineer OLYZON consulting - Trikala Greece Contact: Apostolos
P r o j e c t I n f o r m a t i o n Title: Creating vegetation map using UAV at seaside Palouki forest (Greece) Author: Apostolos Nteris, Surveyor engineer OLYZON consulting - Trikala Greece Contact: Apostolos
UP30 UAV Autopilot System Manual Version 5.7
 UP30 UAV Autopilot System Manual Version 5.7-0 - CONTENTS Warning, warranty and upgrade.....3 Warning....... 3 Warranty...... 3 Upgrade....... 3 Contact..... 4 Introduction to UP30 Autopilot System....
UP30 UAV Autopilot System Manual Version 5.7-0 - CONTENTS Warning, warranty and upgrade.....3 Warning....... 3 Warranty...... 3 Upgrade....... 3 Contact..... 4 Introduction to UP30 Autopilot System....
ROBOTICS ENG YOUSEF A. SHATNAWI INTRODUCTION
 ROBOTICS INTRODUCTION THIS COURSE IS TWO PARTS Mobile Robotics. Locomotion (analogous to manipulation) (Legged and wheeled robots). Navigation and obstacle avoidance algorithms. Robot Vision Sensors and
ROBOTICS INTRODUCTION THIS COURSE IS TWO PARTS Mobile Robotics. Locomotion (analogous to manipulation) (Legged and wheeled robots). Navigation and obstacle avoidance algorithms. Robot Vision Sensors and
Mississippi State University Unmanned Aerial Vehicle Entry into the AUVSI 2004 Student UAV Competition
 Mississippi State University Unmanned Aerial Vehicle Entry into the AUVSI 2004 Student UAV Competition Ian Broussard Cornelia Hayes Kelly Lancaster Craig Ross Blake Sanders Mississippi State University
Mississippi State University Unmanned Aerial Vehicle Entry into the AUVSI 2004 Student UAV Competition Ian Broussard Cornelia Hayes Kelly Lancaster Craig Ross Blake Sanders Mississippi State University
Presentation to CDW Niels Jernes Vej Aalborg E - Denmark - Phone:
 Presentation to CDW 2014 GomSpace at a Glance A space company situated in Denmark Nano-satellite products & platforms Micro-satellites (tailored products) Re-entry systems & micro-gravity R&D Established
Presentation to CDW 2014 GomSpace at a Glance A space company situated in Denmark Nano-satellite products & platforms Micro-satellites (tailored products) Re-entry systems & micro-gravity R&D Established
THE OPS-SAT NANOSATELLITE MISSION
 THE OPS-SAT NANOSATELLITE MISSION Aerospace O.Koudelka, TU Graz M.Wittig MEW Aerospace D.Evans ESA 1 Contents 1) Introduction 2) ESA s OPS-SAT Mission 3) System Design 4) Communications Experiments 5)
THE OPS-SAT NANOSATELLITE MISSION Aerospace O.Koudelka, TU Graz M.Wittig MEW Aerospace D.Evans ESA 1 Contents 1) Introduction 2) ESA s OPS-SAT Mission 3) System Design 4) Communications Experiments 5)
The intelligent mapping & inspection drone
 The intelligent mapping & inspection drone 3 reasons to choose albris 1 flight, 3 types of imagery With the sensefly albris (previously called exom) you can switch between capturing high-res still, thermal
The intelligent mapping & inspection drone 3 reasons to choose albris 1 flight, 3 types of imagery With the sensefly albris (previously called exom) you can switch between capturing high-res still, thermal
DESIGN & FABRICATION OF UAV FOR DATA TRANSMISSION. Department of ME, CUET, Bangladesh
 Proceedings of the International Conference on Mechanical Engineering and Renewable Energy 2017 (ICMERE2017) 18 20 December, 2017, Chittagong, Bangladesh ICMERE2017-PI-177 DESIGN & FABRICATION OF UAV FOR
Proceedings of the International Conference on Mechanical Engineering and Renewable Energy 2017 (ICMERE2017) 18 20 December, 2017, Chittagong, Bangladesh ICMERE2017-PI-177 DESIGN & FABRICATION OF UAV FOR
tethered balloons stratospheric balloons equipped envelope for Stratobus TM airships thermal protections for satellites
 tethered balloons stratospheric balloons equipped envelope for Stratobus TM airships thermal protections for satellites RELIABLE. PERSISTENT. MULTIPURPOSE. ADAPTABLE. airstar aerospace products ranges
tethered balloons stratospheric balloons equipped envelope for Stratobus TM airships thermal protections for satellites RELIABLE. PERSISTENT. MULTIPURPOSE. ADAPTABLE. airstar aerospace products ranges
SMART BIRD TEAM UAS JOURNAL PAPER
 SMART BIRD TEAM UAS JOURNAL PAPER 2010 AUVSI STUDENT COMPETITION MARYLAND ECOLE POLYTECHNIQUE DE MONTREAL Summary 1 Introduction... 4 2 Requirements of the competition... 4 3 System Design... 5 3.1 Design
SMART BIRD TEAM UAS JOURNAL PAPER 2010 AUVSI STUDENT COMPETITION MARYLAND ECOLE POLYTECHNIQUE DE MONTREAL Summary 1 Introduction... 4 2 Requirements of the competition... 4 3 System Design... 5 3.1 Design
In the summer of 2002, Sub-Orbital Technologies developed a low-altitude
 1.0 Introduction In the summer of 2002, Sub-Orbital Technologies developed a low-altitude CanSat satellite at The University of Texas at Austin. At the end of the project, team members came to the conclusion
1.0 Introduction In the summer of 2002, Sub-Orbital Technologies developed a low-altitude CanSat satellite at The University of Texas at Austin. At the end of the project, team members came to the conclusion
1 P a g e. P13231 UAV Test Bed Setup Manual
 1 P a g e P13231 UAV Test Bed Setup Manual Table of Contents Introduction....3 Wings... 3-4 Pitot Tube....3 Aileron Fault...4 Accelerometers.4 Fuselage.. 5-8 GPS.5 FPV System..5 ArduPilot 7 GoPro 7 Rudder
1 P a g e P13231 UAV Test Bed Setup Manual Table of Contents Introduction....3 Wings... 3-4 Pitot Tube....3 Aileron Fault...4 Accelerometers.4 Fuselage.. 5-8 GPS.5 FPV System..5 ArduPilot 7 GoPro 7 Rudder
Nigerian Communications Satellite Ltd. (NIGCOMSAT)
") OVERVIEW OF NIGERIAN SATELLITE AUGMENTATION SYSTEM COMMENCING WITH PILOT DEMONSTRATION TO VALIDATE NATIONAL WORK PLAN presented by Dr. Lawal Lasisi Salami, NIGERIAN COMMUNICATIONS SATELLITE LTD UNDER FEDERAL
OVERVIEW OF NIGERIAN SATELLITE AUGMENTATION SYSTEM COMMENCING WITH PILOT DEMONSTRATION TO VALIDATE NATIONAL WORK PLAN presented by Dr. Lawal Lasisi Salami, NIGERIAN COMMUNICATIONS SATELLITE LTD UNDER FEDERAL
Ground Systems for Small Sats: Simple, Fast, Inexpensive
 Ground Systems for Small Sats: Simple, Fast, Inexpensive but Effective 15 th Ground Systems Architecture Workshop March 1, 2011 Mr Andrew Kwas, Mr Greg Shreve, Northrop Grumman Corp, Mr Adam Yozwiak, Cornell
Ground Systems for Small Sats: Simple, Fast, Inexpensive but Effective 15 th Ground Systems Architecture Workshop March 1, 2011 Mr Andrew Kwas, Mr Greg Shreve, Northrop Grumman Corp, Mr Adam Yozwiak, Cornell
Skylark Trace IV User Manual
 Skylark Trace IV User Manual A skylark soars above the clouds. 一只云雀在云上翱翔 WWW.SkylarkFPV.com SATETY WARNING SKYLARK OSD is for entertainment purpose only, users should bear all the risks involved when using
Skylark Trace IV User Manual A skylark soars above the clouds. 一只云雀在云上翱翔 WWW.SkylarkFPV.com SATETY WARNING SKYLARK OSD is for entertainment purpose only, users should bear all the risks involved when using
FLiFLi AirDrop Quick Guide
 FLiFLi AirDrop Quick Guide FLiFLi Airdrop is a portable drop equipment, attachable to DJI Phantom Series. AirDrop's hassle-free installation will upgrade your drone to another level of drone playing. Compare
FLiFLi AirDrop Quick Guide FLiFLi Airdrop is a portable drop equipment, attachable to DJI Phantom Series. AirDrop's hassle-free installation will upgrade your drone to another level of drone playing. Compare
Mapping with the Phantom 4 Advanced & Pix4Dcapture Jerry Davis, Institute for Geographic Information Science, San Francisco State University
 Mapping with the Phantom 4 Advanced & Pix4Dcapture Jerry Davis, Institute for Geographic Information Science, San Francisco State University The DJI Phantom 4 is a popular, easy to fly UAS that integrates
Mapping with the Phantom 4 Advanced & Pix4Dcapture Jerry Davis, Institute for Geographic Information Science, San Francisco State University The DJI Phantom 4 is a popular, easy to fly UAS that integrates
Space Research expeditions and open space work. Education & Research Teaching and laboratory facilities. Medical Assistance for people
 Space Research expeditions and open space work Education & Research Teaching and laboratory facilities. Medical Assistance for people Safety Life saving activity, guarding Military Use to execute missions
Space Research expeditions and open space work Education & Research Teaching and laboratory facilities. Medical Assistance for people Safety Life saving activity, guarding Military Use to execute missions
CRAFT UAV CRAFT CUSTOMIZABLE SIMULATOR
 CRAFT UAV CRAFT CUSTOMIZABLE SIMULATOR Customizable, modular UAV simulator designed to adapt, evolve, and deliver. The UAV CRAFT customizable Unmanned Aircraft Vehicle (UAV) simulator s design is based
CRAFT UAV CRAFT CUSTOMIZABLE SIMULATOR Customizable, modular UAV simulator designed to adapt, evolve, and deliver. The UAV CRAFT customizable Unmanned Aircraft Vehicle (UAV) simulator s design is based
EzOSD Manual. Overview & Operating Instructions Preliminary. April ImmersionRC EzOSD Manual 1
 EzOSD Manual Overview & Operating Instructions Preliminary. April 2009 ImmersionRC EzOSD Manual 1 Contents Overview... 3 Features... 3 Installation... 3 1. Installation using an ImmersionRC camera and
EzOSD Manual Overview & Operating Instructions Preliminary. April 2009 ImmersionRC EzOSD Manual 1 Contents Overview... 3 Features... 3 Installation... 3 1. Installation using an ImmersionRC camera and
The intelligent mapping & inspection drone
 The intelligent mapping & inspection drone 3 reasons to choose albris 1 flight, 3 types of imagery With the sensefly albris you can switch between capturing highres still, thermal and video imagery during
The intelligent mapping & inspection drone 3 reasons to choose albris 1 flight, 3 types of imagery With the sensefly albris you can switch between capturing highres still, thermal and video imagery during
The on board surveyor
 The on board surveyor A PPK solution for drone-mapping Introduction DROBIT is a high precision positioning system created for drone-based photogrammetry. Its working principle is differential correction
The on board surveyor A PPK solution for drone-mapping Introduction DROBIT is a high precision positioning system created for drone-based photogrammetry. Its working principle is differential correction
Lightweight Fixed Wing UAV
 Lightweight Fixed Wing UAV Cindy Xiao, Rijesh Augustine, Andrew Jowsey, Michael G. Lipsett, Duncan G. Elliott University of Alberta Abstract The University of Alberta Aerial Robotics (UAARG) is a student
Lightweight Fixed Wing UAV Cindy Xiao, Rijesh Augustine, Andrew Jowsey, Michael G. Lipsett, Duncan G. Elliott University of Alberta Abstract The University of Alberta Aerial Robotics (UAARG) is a student
FY-41AP Autopilot & OSD System
 FY-41AP Autopilot & OSD System Installation & Operation Manual (Multi-rotor Version) Guilin Feiyu Electronic Technology Co., Ltd Address: 4 th Floor,YuTaiJie Science Technology Building, Information Industry
FY-41AP Autopilot & OSD System Installation & Operation Manual (Multi-rotor Version) Guilin Feiyu Electronic Technology Co., Ltd Address: 4 th Floor,YuTaiJie Science Technology Building, Information Industry
2009 Student UAS Competition. Abstract:
 UNIVERSITY OF PUERTO RICO MAYAGUEZ CAMPUS COLLEGE OF ENGINEERING 2009 Student UAS Competition Journal Paper Team Members: Pablo R. Mejías, Merqui Galarza Jeancarlo Colón Naldie Torres Josue Comulada Veronica
UNIVERSITY OF PUERTO RICO MAYAGUEZ CAMPUS COLLEGE OF ENGINEERING 2009 Student UAS Competition Journal Paper Team Members: Pablo R. Mejías, Merqui Galarza Jeancarlo Colón Naldie Torres Josue Comulada Veronica
Aerial Photographic System Using an Unmanned Aerial Vehicle
 Aerial Photographic System Using an Unmanned Aerial Vehicle Second Prize Aerial Photographic System Using an Unmanned Aerial Vehicle Institution: Participants: Instructor: Chungbuk National University
Aerial Photographic System Using an Unmanned Aerial Vehicle Second Prize Aerial Photographic System Using an Unmanned Aerial Vehicle Institution: Participants: Instructor: Chungbuk National University
tethered balloons stratospheric balloons equipped envelope for Stratobus TM airships thermal protections for satellites
 tethered balloons stratospheric balloons equipped envelope for Stratobus TM airships thermal protections for satellites RELIABLE. PERSISTENT. MULTIPURPOSE. ADAPTABLE. airstar aerospace products ranges
tethered balloons stratospheric balloons equipped envelope for Stratobus TM airships thermal protections for satellites RELIABLE. PERSISTENT. MULTIPURPOSE. ADAPTABLE. airstar aerospace products ranges
Unmanned Aerial Vehicles: A New Approach for Coastal Habitat Assessment
 Unmanned Aerial Vehicles: A New Approach for Coastal Habitat Assessment David Ryan Principal Marine Scientist WorleyParsons Western Operations 2 OUTLINE Importance of benthic habitat assessment. Common
Unmanned Aerial Vehicles: A New Approach for Coastal Habitat Assessment David Ryan Principal Marine Scientist WorleyParsons Western Operations 2 OUTLINE Importance of benthic habitat assessment. Common
ENHANCEMENTS IN UAV FLIGHT CONTROL AND SENSOR ORIENTATION
 Heinz Jürgen Przybilla Manfred Bäumker, Alexander Zurhorst ENHANCEMENTS IN UAV FLIGHT CONTROL AND SENSOR ORIENTATION Content Introduction Precise Positioning GNSS sensors and software Inertial and augmentation
Heinz Jürgen Przybilla Manfred Bäumker, Alexander Zurhorst ENHANCEMENTS IN UAV FLIGHT CONTROL AND SENSOR ORIENTATION Content Introduction Precise Positioning GNSS sensors and software Inertial and augmentation
Inertial Sensors. Ellipse Series MINIATURE HIGH PERFORMANCE. Navigation, Motion & Heave Sensing IMU AHRS MRU INS VG
 Ellipse Series MINIATURE HIGH PERFORMANCE Inertial Sensors IMU AHRS MRU INS VG ITAR Free 0.2 RMS Navigation, Motion & Heave Sensing ELLIPSE SERIES sets up new standard for miniature and cost-effective
Ellipse Series MINIATURE HIGH PERFORMANCE Inertial Sensors IMU AHRS MRU INS VG ITAR Free 0.2 RMS Navigation, Motion & Heave Sensing ELLIPSE SERIES sets up new standard for miniature and cost-effective
Pitlab & Zbig FPV System Version 2.60a. Pitlab&Zbig OSD. New functions and changes in v2.60. New functions and changes since version 2.
 Pitlab & Zbig FPV System Version 2.60a since version 2.50a Pitlab&Zbig OSD in v2.60a Added support for new Pitlab airspeed sensor. Sensor is connected to yellow OSD socket and is configured in similar
Pitlab & Zbig FPV System Version 2.60a since version 2.50a Pitlab&Zbig OSD in v2.60a Added support for new Pitlab airspeed sensor. Sensor is connected to yellow OSD socket and is configured in similar
Introduction. Satellite Research Centre (SaRC)
") SATELLITE RESEARCH CENTRE - SaRC Introduction The of NTU strives to be a centre of excellence in satellite research and training of students in innovative space missions. Its first milestone satellite
SATELLITE RESEARCH CENTRE - SaRC Introduction The of NTU strives to be a centre of excellence in satellite research and training of students in innovative space missions. Its first milestone satellite
Inertial Sensors. Ellipse Series MINIATURE HIGH PERFORMANCE. Navigation, Motion & Heave Sensing IMU AHRS MRU INS VG
 Ellipse Series MINIATURE HIGH PERFORMANCE Inertial Sensors IMU AHRS MRU INS VG ITAR Free 0.1 RMS Navigation, Motion & Heave Sensing ELLIPSE SERIES sets up new standard for miniature and cost-effective
Ellipse Series MINIATURE HIGH PERFORMANCE Inertial Sensors IMU AHRS MRU INS VG ITAR Free 0.1 RMS Navigation, Motion & Heave Sensing ELLIPSE SERIES sets up new standard for miniature and cost-effective
Auvsi 2012 Journal Paper. Abstract ISTANBUL TECHNICAL UNIVERSITY CONTROL & AVIONICS LABORATORY TEAM HEZARFEN
 ISTANBUL TECHNICAL UNIVERSITY CONTROL & AVIONICS LABORATORY TEAM HEZARFEN Auvsi 2012 Journal Paper Abstract UAS of Team Hezarfen from Istanbul Technical University is explained in this paper. Aerial vehicle
ISTANBUL TECHNICAL UNIVERSITY CONTROL & AVIONICS LABORATORY TEAM HEZARFEN Auvsi 2012 Journal Paper Abstract UAS of Team Hezarfen from Istanbul Technical University is explained in this paper. Aerial vehicle
NCUBE: The first Norwegian Student Satellite. Presenters on the AAIA/USU SmallSat: Åge-Raymond Riise Eystein Sæther
 NCUBE: The first Norwegian Student Satellite Presenters on the AAIA/USU SmallSat: Åge-Raymond Riise Eystein Sæther Motivation Build space related competence within: mechanical engineering, electronics,
NCUBE: The first Norwegian Student Satellite Presenters on the AAIA/USU SmallSat: Åge-Raymond Riise Eystein Sæther Motivation Build space related competence within: mechanical engineering, electronics,
Titan Bumblebee : A 1kg Lander-Launched UAV Concept
 Titan Bumblebee : A 1kg Lander-Launched UAV Concept Ralph D. Lorenz Space Department, Johns Hopkins University Applied Physics Laboratory, 11100 Johns Hopkins Road, Laurel, MD 20723, USA (Ralph.lorenz@jhuapl.edu)
Titan Bumblebee : A 1kg Lander-Launched UAV Concept Ralph D. Lorenz Space Department, Johns Hopkins University Applied Physics Laboratory, 11100 Johns Hopkins Road, Laurel, MD 20723, USA (Ralph.lorenz@jhuapl.edu)
Validation of the QuestUAV PPK System
 Validation of the QuestUAV PPK System 3cm in xy, 400ft, no GCPs, 100Ha, 25 flights Nigel King 1, Kerstin Traut 2, Cameron Weeks 3 & Ruairi Hardman 4 1 Director QuestUAV, 2 Data Analyst QuestUAV, 3 Production
Validation of the QuestUAV PPK System 3cm in xy, 400ft, no GCPs, 100Ha, 25 flights Nigel King 1, Kerstin Traut 2, Cameron Weeks 3 & Ruairi Hardman 4 1 Director QuestUAV, 2 Data Analyst QuestUAV, 3 Production
Miniaturized In-Situ Plasma Sensors Applications for NSF Small Satellite program. Dr. Geoff McHarg
 Miniaturized In-Situ Plasma Sensors Applications for NSF Small Satellite program Dr. Geoff McHarg National Science Foundation Small Satellite Workshop- CEDAR June 2007 FalconSat-3 Physics on a small satellite
Miniaturized In-Situ Plasma Sensors Applications for NSF Small Satellite program Dr. Geoff McHarg National Science Foundation Small Satellite Workshop- CEDAR June 2007 FalconSat-3 Physics on a small satellite
University of Alberta Aerial Robotics Group
 University of Alberta Aerial Robotics Group 2008 AUVSI Student UAS Competition Journal Paper Submission May 28, 2008 Abstract. This paper describes the 2008 foray of the University of Alberta Aerial Robotics
University of Alberta Aerial Robotics Group 2008 AUVSI Student UAS Competition Journal Paper Submission May 28, 2008 Abstract. This paper describes the 2008 foray of the University of Alberta Aerial Robotics
CanX-2 and NTS Canada's Smallest Operational Satellites
 CanX-2 and NTS Canada's Smallest Operational Satellites Daniel D. Kekez Space Flight Laboratory University of Toronto Institute for Aerospace Studies 9 August 2008 Overview Introduction to UTIAS/ SFL Mission
CanX-2 and NTS Canada's Smallest Operational Satellites Daniel D. Kekez Space Flight Laboratory University of Toronto Institute for Aerospace Studies 9 August 2008 Overview Introduction to UTIAS/ SFL Mission
ŞahinSim: A Flight Simulator for End-Game Simulations
 ŞahinSim: A Flight Simulator for End-Game Simulations Özer Özaydın, D. Turgay Altılar Department of Computer Science ITU Informatics Institute Maslak, Istanbul, 34457, Turkey ozaydinoz@itu.edu.tr altilar@cs.itu.edu.tr
ŞahinSim: A Flight Simulator for End-Game Simulations Özer Özaydın, D. Turgay Altılar Department of Computer Science ITU Informatics Institute Maslak, Istanbul, 34457, Turkey ozaydinoz@itu.edu.tr altilar@cs.itu.edu.tr
University of California, San Diego AIAA AUVSI
 University of California, San Diego AIAA AUVSI Morgan Machado, Karthik Balakrishnan, Andrew Chan, Thomas Hong, David Klein, Joe Formanes, Mitch Harris, Michael Pattanachinda, Jeff Gollober, Neil Bloom,
University of California, San Diego AIAA AUVSI Morgan Machado, Karthik Balakrishnan, Andrew Chan, Thomas Hong, David Klein, Joe Formanes, Mitch Harris, Michael Pattanachinda, Jeff Gollober, Neil Bloom,
Project Bellerophon April 17, 2008
 Project Bellerophon April 17, 2008 Overview Telecommunications Flight Control Power Systems Vehicle Ground Data Processing Inputs Outputs Source Antennas Antennas Sensors Controls Supply Data Channels
Project Bellerophon April 17, 2008 Overview Telecommunications Flight Control Power Systems Vehicle Ground Data Processing Inputs Outputs Source Antennas Antennas Sensors Controls Supply Data Channels
Istanbul Technical University Faculty of Aeronautics and Astronautics Space Systems Design and Test Laboratory
 Title: Space Advertiser (S-VERTISE) Primary POC: Aeronautics and Astronautics Engineer Hakan AYKENT Organization: Istanbul Technical University POC email: aykent@itu.edu.tr Need Worldwide companies need
Title: Space Advertiser (S-VERTISE) Primary POC: Aeronautics and Astronautics Engineer Hakan AYKENT Organization: Istanbul Technical University POC email: aykent@itu.edu.tr Need Worldwide companies need
Hopper Spacecraft Simulator. Billy Hau and Brian Wisniewski
 Hopper Spacecraft Simulator Billy Hau and Brian Wisniewski Agenda Introduction Flight Dynamics Hardware Design Avionics Control System Future Works Introduction Mission Overview Collaboration with Penn
Hopper Spacecraft Simulator Billy Hau and Brian Wisniewski Agenda Introduction Flight Dynamics Hardware Design Avionics Control System Future Works Introduction Mission Overview Collaboration with Penn
The Future of AI A Robotics Perspective
 The Future of AI A Robotics Perspective Wolfram Burgard Autonomous Intelligent Systems Department of Computer Science University of Freiburg Germany The Future of AI My Robotics Perspective Wolfram Burgard
The Future of AI A Robotics Perspective Wolfram Burgard Autonomous Intelligent Systems Department of Computer Science University of Freiburg Germany The Future of AI My Robotics Perspective Wolfram Burgard