IPRO 312: Unmanned Aerial Systems
|
|
|
- Gregory Oliver
- 5 years ago
- Views:
Transcription
1 IPRO 312: Unmanned Aerial Systems Kay, Vlad, Akshay, Chris, Andrew, Sebastian, Anurag, Ani, Ivo, Roger Dr. Vural
2 Diverse IPRO Group ECE MMAE BME ARCH CS
3 Outline Background Approach Team Research Integration The Future

4 What is a UAS? Unmanned Aerial System Remotely piloted vehicle Air planes, helicopters, drones etc.
5 Why a UAS? Autonomous Flights Research Remote Sensing Transport Search & Rescue Repetitive/Hazardous Tasks Armed Attacks
6 Our Goal Develop an unmanned aircraft capable of Autonomous flights Real Time Object Recognition
7 Outline Background Approach Team Research Integration The Future

8 Approach - Dividing teams



9 Vision Team Ground Station Team Autopilot Team Team Structure Kay Traylor Aniruddha Katre Ivo Semerdjiev * Christopher Ragsdale Akshay Goliya Andrew Ellickson Anurag Kotha* Chieh Luo Vladimir Semenov Sebastian Bilski * Legal Team Investigating legal implications and guidelines
10 Outline Background Approach Team Research Integration The Future




11 Big Picture
12 Outline Background Approach Team Research Integration The Future Auto Pilot Image Detection Ground Station
13 Auto Pilot - Goals Learn autopilot open-source code Tune to aircraft dynamics Assemble electronics & control hardware Sensor integration and verification
14 Auto Pilot Hardware Assembled Hardware ATmega1280 microprocessor Flash Memory 3-axix gyroscope Accelerometer Magnetometer Pressure sensor (differential & absolute) Temperature sensor Long range ultrasonic range finder GPS receiver Xbee long range radio modem(900 MHz) 72 MHz radio for manual control Testing to assure functionality
15 Auto Pilot- Software Stabilization using 3 axis gyroscope Autonomous landing with controlled rate of descent ( Ultrasound range finder) Autonomous Take off using air temp, pressure sensors and GPS receivers Autonomous waypoint navigation & return to home using 3 axis gyroscope, accelerometer, air speed, altitude sensors, and GPS In-Flight route modification Continuous transmission telemetry info to Ground Station

16
17 Outline Background Approach Team Research Integration The Future Auto Pilot Image Detection Ground Station
18 Image Processing - Goals Install software into Linux Environment Create positive (target) and negative (background) sample images Use haarcascade to develop classifier and train face detect code to detect defined targets Integrate with rest of system
19 Software OpenCV MATLAB Open source library of programming functions aimed at real time computer vision originally developed by Intel Create sample images

20 Creating Sample Images Developed an automatic method to produce several thousand positive and negative samples Tried using OpenCV Developed a program in MATLAB to rotate shapes and overlay those onto backgrounds
21 Haarcascade Use created sample images to train a classifier to detect specified target Issues Segmentation fault Parameter values Pixel size To be done Used trained classifiers in Object Detect
22 Outline Background Approach Team Research Integration The Future Auto Pilot Image Detection Ground Station
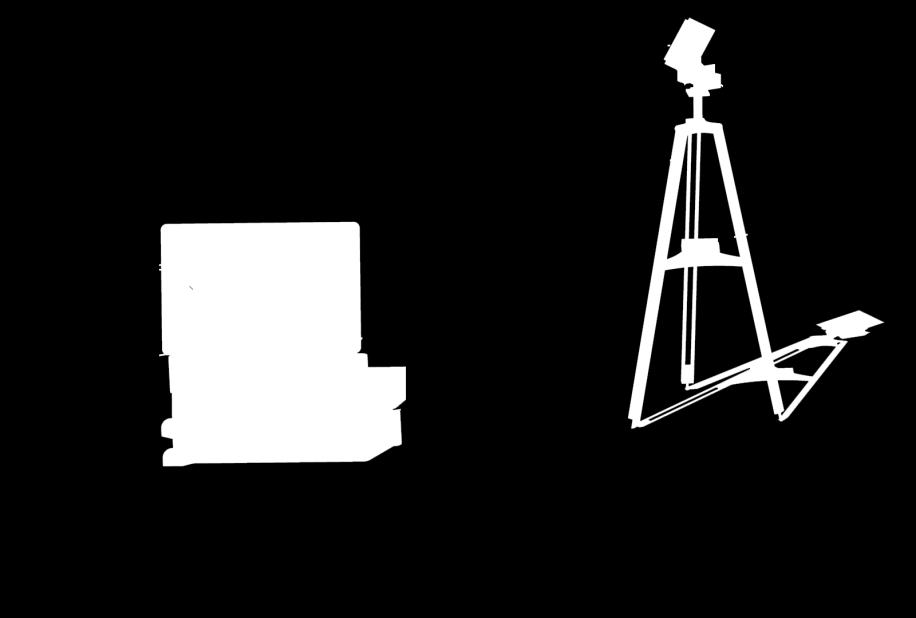
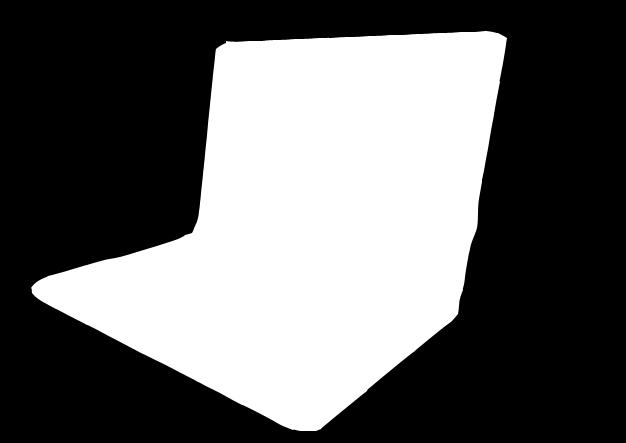
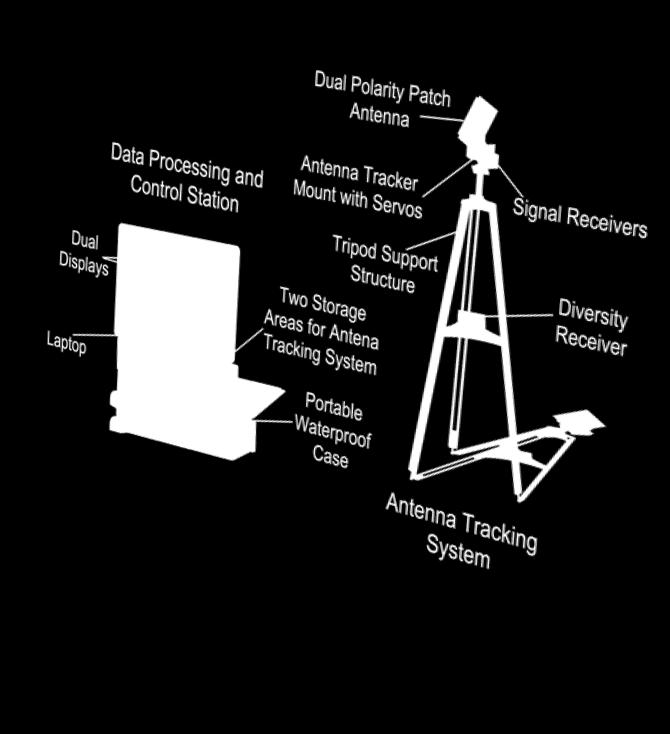
23 Ground Station Functions Connects airframe to image processing Connects airframe to control software Update GPS waypoints Sends and receives information to and from airframe Airspeed, Altitude, orientation Acts as human interface to airframe GUI enables human intervention and control
24 Ground Station - Goals Facilitate total system integration Maximize range of receivers & transmitters Maintain constant signal with UAS during flight Develop a graphical user interface for all UAS relevant information Keep costs down while maintaining versatility


25 Ground Station Components
26 Ground Station Progress Completed assembly and programming of antenna tracking system Purchased majority of the components Need to purchase the case and batteries Completed graphical user interface (GUI) development Currently testing hardware and software
27 Outline Background Approach Team Research Integration The Future



28 Integration
29 Outline Background Approach Team Research Integration The Future
30 Future Work Take part in AUVASI Competition Integration of autopilot and image processing into ground station Developing a pre-flight checklist and diagnostic manual Testing & Analysis Approaching sponsors
31 Questions?
Classical Control Based Autopilot Design Using PC/104
 Classical Control Based Autopilot Design Using PC/104 Mohammed A. Elsadig, Alneelain University, Dr. Mohammed A. Hussien, Alneelain University. Abstract Many recent papers have been written in unmanned
Classical Control Based Autopilot Design Using PC/104 Mohammed A. Elsadig, Alneelain University, Dr. Mohammed A. Hussien, Alneelain University. Abstract Many recent papers have been written in unmanned
TEAM AERO-I TEAM AERO-I JOURNAL PAPER DELHI TECHNOLOGICAL UNIVERSITY Journal paper for IARC 2014
 TEAM AERO-I TEAM AERO-I JOURNAL PAPER DELHI TECHNOLOGICAL UNIVERSITY DELHI TECHNOLOGICAL UNIVERSITY Journal paper for IARC 2014 2014 IARC ABSTRACT The paper gives prominence to the technical details of
TEAM AERO-I TEAM AERO-I JOURNAL PAPER DELHI TECHNOLOGICAL UNIVERSITY DELHI TECHNOLOGICAL UNIVERSITY Journal paper for IARC 2014 2014 IARC ABSTRACT The paper gives prominence to the technical details of
FLCS V2.1. AHRS, Autopilot, Gyro Stabilized Gimbals Control, Ground Control Station
 AHRS, Autopilot, Gyro Stabilized Gimbals Control, Ground Control Station The platform provides a high performance basis for electromechanical system control. Originally designed for autonomous aerial vehicle
AHRS, Autopilot, Gyro Stabilized Gimbals Control, Ground Control Station The platform provides a high performance basis for electromechanical system control. Originally designed for autonomous aerial vehicle
The Next Generation Design of Autonomous MAV Flight Control System SmartAP
 The Next Generation Design of Autonomous MAV Flight Control System SmartAP Kirill Shilov Department of Aeromechanics and Flight Engineering Moscow Institute of Physics and Technology 16 Gagarina st, Zhukovsky,
The Next Generation Design of Autonomous MAV Flight Control System SmartAP Kirill Shilov Department of Aeromechanics and Flight Engineering Moscow Institute of Physics and Technology 16 Gagarina st, Zhukovsky,
Heterogeneous Control of Small Size Unmanned Aerial Vehicles
 Magyar Kutatók 10. Nemzetközi Szimpóziuma 10 th International Symposium of Hungarian Researchers on Computational Intelligence and Informatics Heterogeneous Control of Small Size Unmanned Aerial Vehicles
Magyar Kutatók 10. Nemzetközi Szimpóziuma 10 th International Symposium of Hungarian Researchers on Computational Intelligence and Informatics Heterogeneous Control of Small Size Unmanned Aerial Vehicles
SMART BIRD TEAM UAS JOURNAL PAPER
 SMART BIRD TEAM UAS JOURNAL PAPER 2010 AUVSI STUDENT COMPETITION MARYLAND ECOLE POLYTECHNIQUE DE MONTREAL Summary 1 Introduction... 4 2 Requirements of the competition... 4 3 System Design... 5 3.1 Design
SMART BIRD TEAM UAS JOURNAL PAPER 2010 AUVSI STUDENT COMPETITION MARYLAND ECOLE POLYTECHNIQUE DE MONTREAL Summary 1 Introduction... 4 2 Requirements of the competition... 4 3 System Design... 5 3.1 Design
2009 Student UAS Competition. Abstract:
 UNIVERSITY OF PUERTO RICO MAYAGUEZ CAMPUS COLLEGE OF ENGINEERING 2009 Student UAS Competition Journal Paper Team Members: Pablo R. Mejías, Merqui Galarza Jeancarlo Colón Naldie Torres Josue Comulada Veronica
UNIVERSITY OF PUERTO RICO MAYAGUEZ CAMPUS COLLEGE OF ENGINEERING 2009 Student UAS Competition Journal Paper Team Members: Pablo R. Mejías, Merqui Galarza Jeancarlo Colón Naldie Torres Josue Comulada Veronica
2007 AUVSI Competition Paper Near Space Unmanned Aerial Vehicle (NSUAV) Of
 Of") 1 2007 AUVSI Competition Paper Near Space Unmanned Aerial Vehicle (NSUAV) Of University of Colorado at Colorado Springs (UCCS) Plane in flight June 9, 2007 Faculty Advisor: Dr. David Schmidt Team Members:
1 2007 AUVSI Competition Paper Near Space Unmanned Aerial Vehicle (NSUAV) Of University of Colorado at Colorado Springs (UCCS) Plane in flight June 9, 2007 Faculty Advisor: Dr. David Schmidt Team Members:
Air Surveillance Drones. ENSC 305/440 Capstone Project Spring 2014
 Air Surveillance Drones ENSC 305/440 Capstone Project Spring 2014 Group Members: Armin Samadanian Chief Executive Officer Juan Carlos Diaz Lead Technician and Test Pilot Afshin Nikzat Lead Financial Planner
Air Surveillance Drones ENSC 305/440 Capstone Project Spring 2014 Group Members: Armin Samadanian Chief Executive Officer Juan Carlos Diaz Lead Technician and Test Pilot Afshin Nikzat Lead Financial Planner
DESIGN CONSTRAINTS ANALYSIS
 TEAM 9 -MRAV DESIGN CONSTRAINTS ANALYSIS by Nick Gentry UPDATED PSSC 1. An ability to remotely monitor remaining battery life (fuel gauge). 2. An ability to hover in a stable position (based on autonomous
TEAM 9 -MRAV DESIGN CONSTRAINTS ANALYSIS by Nick Gentry UPDATED PSSC 1. An ability to remotely monitor remaining battery life (fuel gauge). 2. An ability to hover in a stable position (based on autonomous
Data Acquisition System for an Unmanned Aerial Vehicle
 IJSTE - International Journal of Science Technology & Engineering Volume 1 Issue 11 May 2015 ISSN (online): 2349-784X Data Acquisition System for an Unmanned Aerial Vehicle Akshay Patil Vrunal Mhatre Naveen
IJSTE - International Journal of Science Technology & Engineering Volume 1 Issue 11 May 2015 ISSN (online): 2349-784X Data Acquisition System for an Unmanned Aerial Vehicle Akshay Patil Vrunal Mhatre Naveen
Introducing the Quadrotor Flying Robot
 Introducing the Quadrotor Flying Robot Roy Brewer Organizer Philadelphia Robotics Meetup Group August 13, 2009 What is a Quadrotor? A vehicle having 4 rotors (propellers) at each end of a square cross
Introducing the Quadrotor Flying Robot Roy Brewer Organizer Philadelphia Robotics Meetup Group August 13, 2009 What is a Quadrotor? A vehicle having 4 rotors (propellers) at each end of a square cross
ECE 477 Digital Systems Senior Design Project Rev 8/09. Homework 5: Theory of Operation and Hardware Design Narrative
 ECE 477 Digital Systems Senior Design Project Rev 8/09 Homework 5: Theory of Operation and Hardware Design Narrative Team Code Name: _ATV Group No. 3 Team Member Completing This Homework: Sebastian Hening
ECE 477 Digital Systems Senior Design Project Rev 8/09 Homework 5: Theory of Operation and Hardware Design Narrative Team Code Name: _ATV Group No. 3 Team Member Completing This Homework: Sebastian Hening
Mississippi State University Unmanned Aerial Vehicle Entry into the AUVSI 2004 Student UAV Competition
 Mississippi State University Unmanned Aerial Vehicle Entry into the AUVSI 2004 Student UAV Competition Ian Broussard Cornelia Hayes Kelly Lancaster Craig Ross Blake Sanders Mississippi State University
Mississippi State University Unmanned Aerial Vehicle Entry into the AUVSI 2004 Student UAV Competition Ian Broussard Cornelia Hayes Kelly Lancaster Craig Ross Blake Sanders Mississippi State University
North Carolina State University Aerial Robotics Club
 North Carolina State University Aerial Robotics Club 2007 AUVSI Student UAS Competition Journal Paper Entry June 1, 2007 by Matthew Hazard (NCSU 08) with thanks to Alan Stewart and James Scoggins NCSU
North Carolina State University Aerial Robotics Club 2007 AUVSI Student UAS Competition Journal Paper Entry June 1, 2007 by Matthew Hazard (NCSU 08) with thanks to Alan Stewart and James Scoggins NCSU
Development of an Autonomous Aerial Reconnaissance System
 Development of an Autonomous Aerial Reconnaissance System Jessica Dooley, Ekaterina Taralova, Prasad Gabbur, Timothy Spriggs University of Arizona Tucson, AZ ABSTRACT In preparation for the 2003 International
Development of an Autonomous Aerial Reconnaissance System Jessica Dooley, Ekaterina Taralova, Prasad Gabbur, Timothy Spriggs University of Arizona Tucson, AZ ABSTRACT In preparation for the 2003 International
Project Number: 13231
 Multidisciplinary Senior Design Conference Kate Gleason College of Engineering Rochester Institute of Technology Rochester, New York 14623 Project Number: 13231 UAV GROUND-STATION AND SEEDED FAULT DETECTION
Multidisciplinary Senior Design Conference Kate Gleason College of Engineering Rochester Institute of Technology Rochester, New York 14623 Project Number: 13231 UAV GROUND-STATION AND SEEDED FAULT DETECTION
UAV - UAS TECHNOLOGY BASICS
 UAV - UAS TECHNOLOGY BASICS Dr. István Koller BUTE Department of Networked Systems and Services 2017. október 9., Budapest koller@hit.bme.hu Content 0. Introduction to UAV technology 1. Fixed wing aircraft
UAV - UAS TECHNOLOGY BASICS Dr. István Koller BUTE Department of Networked Systems and Services 2017. október 9., Budapest koller@hit.bme.hu Content 0. Introduction to UAV technology 1. Fixed wing aircraft
Project METEOR Instrumentation Platform P08101
 Project METEOR 07-08 Instrumentation Platform P08101 Team Members (from left to right): Christopher J. Fisher (Project Manager), David J. Semione, Gabriela Eneriz Pereira Nunes, Brian A. Hanna, Sergey
Project METEOR 07-08 Instrumentation Platform P08101 Team Members (from left to right): Christopher J. Fisher (Project Manager), David J. Semione, Gabriela Eneriz Pereira Nunes, Brian A. Hanna, Sergey
드론의제어원리. Professor H.J. Park, Dept. of Mechanical System Design, Seoul National University of Science and Technology.
 드론의제어원리 Professor H.J. Park, Dept. of Mechanical System Design, Seoul National University of Science and Technology. An Unmanned aerial vehicle (UAV) is a Unmanned Aerial Vehicle. UAVs include both autonomous
드론의제어원리 Professor H.J. Park, Dept. of Mechanical System Design, Seoul National University of Science and Technology. An Unmanned aerial vehicle (UAV) is a Unmanned Aerial Vehicle. UAVs include both autonomous
School of Surveying & Spatial Information Systems, UNSW, Sydney, Australia
 Development of an Unmanned Aerial Vehicle Platform Using Multisensor Navigation Technology School of Surveying & Spatial Information Systems, UNSW, Sydney, Australia Gang Sun 1,2, Jiawei Xie 1, Yong Li
Development of an Unmanned Aerial Vehicle Platform Using Multisensor Navigation Technology School of Surveying & Spatial Information Systems, UNSW, Sydney, Australia Gang Sun 1,2, Jiawei Xie 1, Yong Li
Midway Design Review. Search And Find Emergency Drone SAFE Drone. Team 4 December 5, 2016
 Midway Design Review Search And Find Emergency Drone SAFE Drone Team 4 December 5, 2016 Advisor: Professor Leonard 1 Team Members Jamie Kline, EE Serena Thomas, EE Brad Marszalkowski, EE Bjorn Galaske,
Midway Design Review Search And Find Emergency Drone SAFE Drone Team 4 December 5, 2016 Advisor: Professor Leonard 1 Team Members Jamie Kline, EE Serena Thomas, EE Brad Marszalkowski, EE Bjorn Galaske,
Introduction to Multicopter Design and Control
 Introduction to Multicopter Design and Control Lesson 14 Health Evaluation and Failsafe Quan Quan, Associate Professor qq_buaa@buaa.edu.cn BUAA Reliable Flight Control Group, http://rfly.buaa.edu.cn/ Beihang
Introduction to Multicopter Design and Control Lesson 14 Health Evaluation and Failsafe Quan Quan, Associate Professor qq_buaa@buaa.edu.cn BUAA Reliable Flight Control Group, http://rfly.buaa.edu.cn/ Beihang
U-Pilot can fly the aircraft using waypoint navigation, even when the GPS signal has been lost by using dead-reckoning navigation. Can also orbit arou
 We offer a complete solution for a user that need to put a payload in a advanced position at low cost completely designed by the Spanish company Airelectronics. Using a standard computer, the user can
We offer a complete solution for a user that need to put a payload in a advanced position at low cost completely designed by the Spanish company Airelectronics. Using a standard computer, the user can
Flight control Set and Kit
 Flight control Set and Kit Quick Start Guide For MegaPirate NG Version 1.2 Thanks for choosing AirStudio flight control electronics. We have created it based on best-in-class software, hardware and our
Flight control Set and Kit Quick Start Guide For MegaPirate NG Version 1.2 Thanks for choosing AirStudio flight control electronics. We have created it based on best-in-class software, hardware and our
INTELLIGENT LANDING TECHNIQUE USING ULTRASONIC SENSOR FOR MAV APPLICATIONS
 Volume 114 No. 12 2017, 429-436 ISSN: 1311-8080 (printed version); ISSN: 1314-3395 (on-line version) url: http://www.ijpam.eu ijpam.eu INTELLIGENT LANDING TECHNIQUE USING ULTRASONIC SENSOR FOR MAV APPLICATIONS
Volume 114 No. 12 2017, 429-436 ISSN: 1311-8080 (printed version); ISSN: 1314-3395 (on-line version) url: http://www.ijpam.eu ijpam.eu INTELLIGENT LANDING TECHNIQUE USING ULTRASONIC SENSOR FOR MAV APPLICATIONS
Module 2: Lecture 4 Flight Control System
 26 Guidance of Missiles/NPTEL/2012/D.Ghose Module 2: Lecture 4 Flight Control System eywords. Roll, Pitch, Yaw, Lateral Autopilot, Roll Autopilot, Gain Scheduling 3.2 Flight Control System The flight control
26 Guidance of Missiles/NPTEL/2012/D.Ghose Module 2: Lecture 4 Flight Control System eywords. Roll, Pitch, Yaw, Lateral Autopilot, Roll Autopilot, Gain Scheduling 3.2 Flight Control System The flight control
Automatic Dependent Surveillance -ADS-B
 ASECNA Workshop on ADS-B (Dakar, Senegal, 22 to 23 July 2014) Automatic Dependent Surveillance -ADS-B Presented by FX SALAMBANGA Regional Officer, CNS WACAF OUTLINE I Definition II Principles III Architecture
ASECNA Workshop on ADS-B (Dakar, Senegal, 22 to 23 July 2014) Automatic Dependent Surveillance -ADS-B Presented by FX SALAMBANGA Regional Officer, CNS WACAF OUTLINE I Definition II Principles III Architecture
Design and Navigation Control of an Advanced Level CANSAT. Mansur ÇELEBİ Aeronautics and Space Technologies Institute Turkish Air Force Academy
 Design and Navigation Control of an Advanced Level CANSAT Mansur ÇELEBİ Aeronautics and Space Technologies Institute Turkish Air Force Academy 1 Introduction Content Advanced Level CanSat Design Airframe
Design and Navigation Control of an Advanced Level CANSAT Mansur ÇELEBİ Aeronautics and Space Technologies Institute Turkish Air Force Academy 1 Introduction Content Advanced Level CanSat Design Airframe
New functions and changes summary
 New functions and changes summary A comparison of PitLab & Zbig FPV System versions 2.50 and 2.40 Table of Contents New features...2 OSD and autopilot...2 Navigation modes...2 Routes...2 Takeoff...2 Automatic
New functions and changes summary A comparison of PitLab & Zbig FPV System versions 2.50 and 2.40 Table of Contents New features...2 OSD and autopilot...2 Navigation modes...2 Routes...2 Takeoff...2 Automatic
Testing Autonomous Hover Algorithms Using a Quad rotor Helicopter Test Bed
 Testing Autonomous Hover Algorithms Using a Quad rotor Helicopter Test Bed In conjunction with University of Washington Distributed Space Systems Lab Justin Palm Andy Bradford Andrew Nelson Milestone One
Testing Autonomous Hover Algorithms Using a Quad rotor Helicopter Test Bed In conjunction with University of Washington Distributed Space Systems Lab Justin Palm Andy Bradford Andrew Nelson Milestone One
Development of a Low Cost Autonomous Aerial Robotics System V4.0 1 June 2008
 Development of a Low Cost Autonomous Aerial Robotics System V4.0 1 June 2008 Frank Manning AIAA Tucson Section Tete Barrigah University of Arizona Huihong Kuang University of Arizona Tyler Nelson University
Development of a Low Cost Autonomous Aerial Robotics System V4.0 1 June 2008 Frank Manning AIAA Tucson Section Tete Barrigah University of Arizona Huihong Kuang University of Arizona Tyler Nelson University
OughtToPilot. Project Report of Submission PC128 to 2008 Propeller Design Contest. Jason Edelberg
 OughtToPilot Project Report of Submission PC128 to 2008 Propeller Design Contest Jason Edelberg Table of Contents Project Number.. 3 Project Description.. 4 Schematic 5 Source Code. Attached Separately
OughtToPilot Project Report of Submission PC128 to 2008 Propeller Design Contest Jason Edelberg Table of Contents Project Number.. 3 Project Description.. 4 Schematic 5 Source Code. Attached Separately
SUAS 2009 Competition Journal TEAM AGUILA ARPIA. Cindy Cerna Hillar Lago Jin Wang. Advisor: Ibrahim Tansel Lu Wang
 SUAS 2009 Competition Journal TEAM AGUILA ARPIA Cindy Cerna Hillar Lago Jin Wang Advisor: Ibrahim Tansel Lu Wang May 30, 2009 TABLE OF CONTENTS TABLE OF CONTENTS...2 LIST OF FIGURES...3 INTRODUCTION...4
SUAS 2009 Competition Journal TEAM AGUILA ARPIA Cindy Cerna Hillar Lago Jin Wang Advisor: Ibrahim Tansel Lu Wang May 30, 2009 TABLE OF CONTENTS TABLE OF CONTENTS...2 LIST OF FIGURES...3 INTRODUCTION...4
Dynamics and Operations of an Orbiting Satellite Simulation. Requirements Specification 13 May 2009
 Dynamics and Operations of an Orbiting Satellite Simulation Requirements Specification 13 May 2009 Christopher Douglas, Karl Nielsen, and Robert Still Sponsor / Faculty Advisor: Dr. Scott Trimboli ECE
Dynamics and Operations of an Orbiting Satellite Simulation Requirements Specification 13 May 2009 Christopher Douglas, Karl Nielsen, and Robert Still Sponsor / Faculty Advisor: Dr. Scott Trimboli ECE
Visit of Northrop Grumman. Systems Engineering/ Engineering Design 12/5/16. Jim Scanlan
 Visit of Northrop Grumman Systems Engineering/ Engineering Design 12/5/16 Jim Scanlan Southampton Has eight University Technology Centres; four aerospace related; Rolls-Royce UTC in design Rolls-Royce
Visit of Northrop Grumman Systems Engineering/ Engineering Design 12/5/16 Jim Scanlan Southampton Has eight University Technology Centres; four aerospace related; Rolls-Royce UTC in design Rolls-Royce
Assessing the likelihood of GNSS spoofing attacks on RPAS
 Assessing the likelihood of GNSS spoofing attacks on RPAS Mike Maarse UvA/NLR 30-06-2016 Mike Maarse (UvA/NLR) RP2 Presentation 30-06-2016 1 / 25 Introduction Motivation/relevance Growing number of RPAS
Assessing the likelihood of GNSS spoofing attacks on RPAS Mike Maarse UvA/NLR 30-06-2016 Mike Maarse (UvA/NLR) RP2 Presentation 30-06-2016 1 / 25 Introduction Motivation/relevance Growing number of RPAS
INSTRUCTIONS. 3DR Plane CONTENTS. Thank you for purchasing a 3DR Plane!
 DR Plane INSTRUCTIONS Thank you for purchasing a DR Plane! CONTENTS 1 1 Fuselage Right wing Left wing Horizontal stabilizer Vertical stabilizer Carbon fiber bar 1 1 1 7 8 10 11 1 Audio/video (AV) cable
DR Plane INSTRUCTIONS Thank you for purchasing a DR Plane! CONTENTS 1 1 Fuselage Right wing Left wing Horizontal stabilizer Vertical stabilizer Carbon fiber bar 1 1 1 7 8 10 11 1 Audio/video (AV) cable
Requirements Specification Minesweeper
 Requirements Specification Minesweeper Version. Editor: Elin Näsholm Date: November 28, 207 Status Reviewed Elin Näsholm 2/9 207 Approved Martin Lindfors 2/9 207 Course name: Automatic Control - Project
Requirements Specification Minesweeper Version. Editor: Elin Näsholm Date: November 28, 207 Status Reviewed Elin Näsholm 2/9 207 Approved Martin Lindfors 2/9 207 Course name: Automatic Control - Project
Massachusetts Institute of Technology Unmanned Aerial Vehicle Team
 . Massachusetts Institute of Technology Unmanned Aerial Vehicle Team Jonathan Downey, Buddy Michini Matt Doherty, Carl Engel, Jacob Katz, Karl Kulling 2006 AUVSI Student UAV Competition Journal Paper,
. Massachusetts Institute of Technology Unmanned Aerial Vehicle Team Jonathan Downey, Buddy Michini Matt Doherty, Carl Engel, Jacob Katz, Karl Kulling 2006 AUVSI Student UAV Competition Journal Paper,
QUADROTOR ROLL AND PITCH STABILIZATION USING SYSTEM IDENTIFICATION BASED REDESIGN OF EMPIRICAL CONTROLLERS
 QUADROTOR ROLL AND PITCH STABILIZATION USING SYSTEM IDENTIFICATION BASED REDESIGN OF EMPIRICAL CONTROLLERS ANIL UFUK BATMAZ 1, a, OVUNC ELBIR 2,b and COSKU KASNAKOGLU 3,c 1,2,3 Department of Electrical
QUADROTOR ROLL AND PITCH STABILIZATION USING SYSTEM IDENTIFICATION BASED REDESIGN OF EMPIRICAL CONTROLLERS ANIL UFUK BATMAZ 1, a, OVUNC ELBIR 2,b and COSKU KASNAKOGLU 3,c 1,2,3 Department of Electrical
1 P a g e. P13231 UAV Test Bed Setup Manual
 1 P a g e P13231 UAV Test Bed Setup Manual Table of Contents Introduction....3 Wings... 3-4 Pitot Tube....3 Aileron Fault...4 Accelerometers.4 Fuselage.. 5-8 GPS.5 FPV System..5 ArduPilot 7 GoPro 7 Rudder
1 P a g e P13231 UAV Test Bed Setup Manual Table of Contents Introduction....3 Wings... 3-4 Pitot Tube....3 Aileron Fault...4 Accelerometers.4 Fuselage.. 5-8 GPS.5 FPV System..5 ArduPilot 7 GoPro 7 Rudder
Dr. Andrew Rawicz School of Engineering Science Simon Fraser University Burnaby, British Columbia V5A 1S6
 March 10, 2014 Dr. Andrew Rawicz School of Engineering Science Simon Fraser University Burnaby, British Columbia V5A 1S6 Re: ENSC 440 Design Specification for ASD: Air Surveillance Drones Dear Dr. Rawicz,
March 10, 2014 Dr. Andrew Rawicz School of Engineering Science Simon Fraser University Burnaby, British Columbia V5A 1S6 Re: ENSC 440 Design Specification for ASD: Air Surveillance Drones Dear Dr. Rawicz,
Many people in their spare time try to find interesting activities to do to keep them
 Introductory Description Many people in their spare time try to find interesting activities to do to keep them occupied. One of these activities is a remote controlled hobby. This hobby involves many vehicles
Introductory Description Many people in their spare time try to find interesting activities to do to keep them occupied. One of these activities is a remote controlled hobby. This hobby involves many vehicles
VCU Skyline. Team Members: Project Advisor: Dr. Robert Klenke. Last Modified May 13, 2004 VCU SKYLINE 1
 VCU Skyline Last Modified May 13, 2004 Team Members: Abhishek Handa Kevin Van Brittiany Wynne Jeffrey E. Quiñones Project Advisor: Dr. Robert Klenke VCU SKYLINE 1 * Table of Contents I. Abstract... 3 II.
VCU Skyline Last Modified May 13, 2004 Team Members: Abhishek Handa Kevin Van Brittiany Wynne Jeffrey E. Quiñones Project Advisor: Dr. Robert Klenke VCU SKYLINE 1 * Table of Contents I. Abstract... 3 II.
University of Maryland Maryland UAS Team AUVSI 2017 Competition Journal Paper. University of Maryland Maryland UAS Team Page: 1
 University of Maryland Maryland UAS Team AUVSI 2017 Competition Journal Paper University of Maryland Maryland UAS Team Page: 1 Table of Contents SYSTEMS ENGINEERING APPROACH MISSION REQUIREMENTS ANALYSIS
University of Maryland Maryland UAS Team AUVSI 2017 Competition Journal Paper University of Maryland Maryland UAS Team Page: 1 Table of Contents SYSTEMS ENGINEERING APPROACH MISSION REQUIREMENTS ANALYSIS
Lightweight Fixed Wing UAV
 Lightweight Fixed Wing UAV Joseph Patton, Paul Owczarczyk, Mattias Dreger, Jason Bui, Cameron Lee, Cindy Xiao, Rijesh Augustine, Sheldon Marquis, Ryan Kapteyn, Nicholas Kwan Wong, Mark Pollock, Andrew
Lightweight Fixed Wing UAV Joseph Patton, Paul Owczarczyk, Mattias Dreger, Jason Bui, Cameron Lee, Cindy Xiao, Rijesh Augustine, Sheldon Marquis, Ryan Kapteyn, Nicholas Kwan Wong, Mark Pollock, Andrew
STUDY OF FIXED WING AIRCRAFT DYNAMICS USING SYSTEM IDENTIFICATION APPROACH
 STUDY OF FIXED WING AIRCRAFT DYNAMICS USING SYSTEM IDENTIFICATION APPROACH A.Kaviyarasu 1, Dr.A.Saravan Kumar 2 1,2 Department of Aerospace Engineering, Madras Institute of Technology, Anna University,
STUDY OF FIXED WING AIRCRAFT DYNAMICS USING SYSTEM IDENTIFICATION APPROACH A.Kaviyarasu 1, Dr.A.Saravan Kumar 2 1,2 Department of Aerospace Engineering, Madras Institute of Technology, Anna University,
User s Guide. SmartAP 2.0 AutoPilot. All rights reserved. 1 SmartAP AutoPilot User s Guide
 1 SmartAP AutoPilot User s Guide SmartAP 2.0 AutoPilot User s Guide All rights reserved 2 SmartAP AutoPilot User s Guide Contents Contents... 2 Introduction... 3 Description... 3 Flight Modes Overview...
1 SmartAP AutoPilot User s Guide SmartAP 2.0 AutoPilot User s Guide All rights reserved 2 SmartAP AutoPilot User s Guide Contents Contents... 2 Introduction... 3 Description... 3 Flight Modes Overview...
Formation Flight CS 229 Project: Final Report
 Formation Flight CS 229 Project: Final Report Zouhair Mahboubi Tao Wang December 11 th, 2009 Stanford University Abstract This paper is submitted as the requirement for the final project report for the
Formation Flight CS 229 Project: Final Report Zouhair Mahboubi Tao Wang December 11 th, 2009 Stanford University Abstract This paper is submitted as the requirement for the final project report for the
Lightweight Fixed Wing UAV
 Lightweight Fixed Wing UAV Cindy Xiao, Rijesh Augustine, Andrew Jowsey, Michael G. Lipsett, Duncan G. Elliott University of Alberta Abstract The University of Alberta Aerial Robotics (UAARG) is a student
Lightweight Fixed Wing UAV Cindy Xiao, Rijesh Augustine, Andrew Jowsey, Michael G. Lipsett, Duncan G. Elliott University of Alberta Abstract The University of Alberta Aerial Robotics (UAARG) is a student
Recent Progress in the Development of On-Board Electronics for Micro Air Vehicles
 Recent Progress in the Development of On-Board Electronics for Micro Air Vehicles Jason Plew Jason Grzywna M. C. Nechyba Jason@mil.ufl.edu number9@mil.ufl.edu Nechyba@mil.ufl.edu Machine Intelligence Lab
Recent Progress in the Development of On-Board Electronics for Micro Air Vehicles Jason Plew Jason Grzywna M. C. Nechyba Jason@mil.ufl.edu number9@mil.ufl.edu Nechyba@mil.ufl.edu Machine Intelligence Lab
Frequency-Domain System Identification and Simulation of a Quadrotor Controller
 AIAA SciTech 13-17 January 2014, National Harbor, Maryland AIAA Modeling and Simulation Technologies Conference AIAA 2014-1342 Frequency-Domain System Identification and Simulation of a Quadrotor Controller
AIAA SciTech 13-17 January 2014, National Harbor, Maryland AIAA Modeling and Simulation Technologies Conference AIAA 2014-1342 Frequency-Domain System Identification and Simulation of a Quadrotor Controller
HALS-H1 Ground Surveillance & Targeting Helicopter
 ARATOS-SWISS Homeland Security AG & SMA PROGRESS, LLC HALS-H1 Ground Surveillance & Targeting Helicopter Defense, Emergency, Homeland Security (Border Patrol, Pipeline Monitoring)... Automatic detection
ARATOS-SWISS Homeland Security AG & SMA PROGRESS, LLC HALS-H1 Ground Surveillance & Targeting Helicopter Defense, Emergency, Homeland Security (Border Patrol, Pipeline Monitoring)... Automatic detection
THE DEVELOPMENT OF A LOW-COST NAVIGATION SYSTEM USING GPS/RDS TECHNOLOGY
 ICAS 2 CONGRESS THE DEVELOPMENT OF A LOW-COST NAVIGATION SYSTEM USING /RDS TECHNOLOGY Yung-Ren Lin, Wen-Chi Lu, Ming-Hao Yang and Fei-Bin Hsiao Institute of Aeronautics and Astronautics, National Cheng
ICAS 2 CONGRESS THE DEVELOPMENT OF A LOW-COST NAVIGATION SYSTEM USING /RDS TECHNOLOGY Yung-Ren Lin, Wen-Chi Lu, Ming-Hao Yang and Fei-Bin Hsiao Institute of Aeronautics and Astronautics, National Cheng
The brain for the plane is the Airelectronics' U-Pilot flight control system, which is embedded inside the plane's fuselage, leaving a lot of space on
 Airelectronics has developed a new complete solution meeting the needs of the farming science. The completely test Skywalkerplatform has been equipped with both thermal and multispectral cameras to measure
Airelectronics has developed a new complete solution meeting the needs of the farming science. The completely test Skywalkerplatform has been equipped with both thermal and multispectral cameras to measure
International Journal of Scientific & Engineering Research, Volume 8, Issue 1, January ISSN
 International Journal of Scientific & Engineering Research, Volume 8, Issue 1, January-2017 500 DESIGN AND FABRICATION OF VOICE CONTROLLED UNMANNED AERIAL VEHICLE Author-Shubham Maindarkar, Co-author-
International Journal of Scientific & Engineering Research, Volume 8, Issue 1, January-2017 500 DESIGN AND FABRICATION OF VOICE CONTROLLED UNMANNED AERIAL VEHICLE Author-Shubham Maindarkar, Co-author-
REMOTE AUTONOMOUS MAPPING OF RADIO FREQUENCY OBSTRUCTION DEVICES
 REMOTE AUTONOMOUS MAPPING OF RADIO FREQUENCY OBSTRUCTION DEVICES Team: Jorgen Baertsch, Ian Cooke, Kennedy Harrmann, Mary Landis, Sarah Larson, Harrison Mast, Ethan Morgan, Selby Stout, Jake Ursetta, Justin
REMOTE AUTONOMOUS MAPPING OF RADIO FREQUENCY OBSTRUCTION DEVICES Team: Jorgen Baertsch, Ian Cooke, Kennedy Harrmann, Mary Landis, Sarah Larson, Harrison Mast, Ethan Morgan, Selby Stout, Jake Ursetta, Justin
Team S.S. Minnow RoboBoat 2015
 1 Team RoboBoat 2015 Abigail Butka Daytona Beach Homeschoolers Palm Coast Florida USA butkaabby872@gmail.com Nick Serle Daytona Beach Homeschoolers Flagler Beach, Florida USA Abstract This document describes
1 Team RoboBoat 2015 Abigail Butka Daytona Beach Homeschoolers Palm Coast Florida USA butkaabby872@gmail.com Nick Serle Daytona Beach Homeschoolers Flagler Beach, Florida USA Abstract This document describes
OBSTACLE DETECTION AND COLLISION AVOIDANCE USING ULTRASONIC DISTANCE SENSORS FOR AN AUTONOMOUS QUADROCOPTER
 OBSTACLE DETECTION AND COLLISION AVOIDANCE USING ULTRASONIC DISTANCE SENSORS FOR AN AUTONOMOUS QUADROCOPTER Nils Gageik, Thilo Müller, Sergio Montenegro University of Würzburg, Aerospace Information Technology
OBSTACLE DETECTION AND COLLISION AVOIDANCE USING ULTRASONIC DISTANCE SENSORS FOR AN AUTONOMOUS QUADROCOPTER Nils Gageik, Thilo Müller, Sergio Montenegro University of Würzburg, Aerospace Information Technology
FAA APPROVED AIRPLANE FLIGHT MANUAL SUPPLEMENT FOR. Trio Pro Pilot Autopilot
 Page 1 480 Ruddiman Drive TRIO AP Flight Manual Supplement North Muskegon, MI 49445 L-1006-01 Rev D FOR Trio Pro Pilot Autopilot ON Cessna 172, 175, 177, 180, 182, 185 and Piper PA28 Aircraft Document
Page 1 480 Ruddiman Drive TRIO AP Flight Manual Supplement North Muskegon, MI 49445 L-1006-01 Rev D FOR Trio Pro Pilot Autopilot ON Cessna 172, 175, 177, 180, 182, 185 and Piper PA28 Aircraft Document
University of California, San Diego AIAA AUVSI
 University of California, San Diego AIAA AUVSI Morgan Machado, Karthik Balakrishnan, Andrew Chan, Thomas Hong, David Klein, Joe Formanes, Mitch Harris, Michael Pattanachinda, Jeff Gollober, Neil Bloom,
University of California, San Diego AIAA AUVSI Morgan Machado, Karthik Balakrishnan, Andrew Chan, Thomas Hong, David Klein, Joe Formanes, Mitch Harris, Michael Pattanachinda, Jeff Gollober, Neil Bloom,
Unmanned Aerial System Competition
 Association for Unmanned Vehicle Systems International Unmanned Aerial System Competition 2007 2008 Design Report Flagship Envy University of California, Los Angeles Abstract A team of undergraduate students
Association for Unmanned Vehicle Systems International Unmanned Aerial System Competition 2007 2008 Design Report Flagship Envy University of California, Los Angeles Abstract A team of undergraduate students
Total Hours Registration through Website or for further details please visit (Refer Upcoming Events Section)
") Total Hours 110-150 Registration Q R Code Registration through Website or for further details please visit http://www.rknec.edu/ (Refer Upcoming Events Section) Module 1: Basics of Microprocessor & Microcontroller
Total Hours 110-150 Registration Q R Code Registration through Website or for further details please visit http://www.rknec.edu/ (Refer Upcoming Events Section) Module 1: Basics of Microprocessor & Microcontroller
Guilin Feiyu Electronic Technology Co., Ltd. Guilin FeiYu Electronic Technology Co.
 Hornet-OSD Manual Feiyu Tech Guilin FeiYu Electronic Technology Co., Ltd Addr:Room C407, Innovation Building, Information Industry Park, ChaoYang Road, QiXing District, Guilin China Web:http://www.feiyudz.cn
Hornet-OSD Manual Feiyu Tech Guilin FeiYu Electronic Technology Co., Ltd Addr:Room C407, Innovation Building, Information Industry Park, ChaoYang Road, QiXing District, Guilin China Web:http://www.feiyudz.cn
North Carolina State University. Aerial Robotics Club. Autonomous Reconnaissance System
 North Carolina State University Aerial Robotics Club Autonomous Reconnaissance System Author: Dan Edwards Submitted: 2 July, 2005 Abstract This paper describes the North Carolina State University Aerial
North Carolina State University Aerial Robotics Club Autonomous Reconnaissance System Author: Dan Edwards Submitted: 2 July, 2005 Abstract This paper describes the North Carolina State University Aerial
ARDUINO BASED CALIBRATION OF AN INERTIAL SENSOR IN VIEW OF A GNSS/IMU INTEGRATION
 Journal of Young Scientist, Volume IV, 2016 ISSN 2344-1283; ISSN CD-ROM 2344-1291; ISSN Online 2344-1305; ISSN-L 2344 1283 ARDUINO BASED CALIBRATION OF AN INERTIAL SENSOR IN VIEW OF A GNSS/IMU INTEGRATION
Journal of Young Scientist, Volume IV, 2016 ISSN 2344-1283; ISSN CD-ROM 2344-1291; ISSN Online 2344-1305; ISSN-L 2344 1283 ARDUINO BASED CALIBRATION OF AN INERTIAL SENSOR IN VIEW OF A GNSS/IMU INTEGRATION
Adaptation of an Commercially Available Stabilised R/C Helicopter to a Fully Autonomous Surveillance UAV
 Bristol International Unmanned Air Vehicle Systems (UAVS) Conference March 2009 Adaptation of an Commercially Available Stabilised R/C Helicopter to a Fully Autonomous Surveillance UAV S.O.H. Madgwick,
Bristol International Unmanned Air Vehicle Systems (UAVS) Conference March 2009 Adaptation of an Commercially Available Stabilised R/C Helicopter to a Fully Autonomous Surveillance UAV S.O.H. Madgwick,
Georgia Tech Aerial Robotics Team 2009 International Aerial Robotics Competition Entry
 Georgia Tech Aerial Robotics Team 2009 International Aerial Robotics Competition Entry Girish Chowdhary, H. Claus Christmann, Dr. Eric N. Johnson, M. Scott Kimbrell, Dr. Erwan Salaün, D. Michael Sobers,
Georgia Tech Aerial Robotics Team 2009 International Aerial Robotics Competition Entry Girish Chowdhary, H. Claus Christmann, Dr. Eric N. Johnson, M. Scott Kimbrell, Dr. Erwan Salaün, D. Michael Sobers,
SABRE-I: An End-to-End Hands-On CubeSat Experience for the Educate Utilizing CubeSat Experience Program
 SABRE-I: An End-to-End Hs-On CubeSat Experience for the Educate Utilizing CubeSat Experience Program Bungo Shiotani Space Systems Group Dept. of Mechanical & Aerospace Engineering University of Florida
SABRE-I: An End-to-End Hs-On CubeSat Experience for the Educate Utilizing CubeSat Experience Program Bungo Shiotani Space Systems Group Dept. of Mechanical & Aerospace Engineering University of Florida
GPS System Design and Control Modeling. Chua Shyan Jin, Ronald. Assoc. Prof Gerard Leng. Aeronautical Engineering Group, NUS
 GPS System Design and Control Modeling Chua Shyan Jin, Ronald Assoc. Prof Gerard Leng Aeronautical Engineering Group, NUS Abstract A GPS system for the autonomous navigation and surveillance of an airship
GPS System Design and Control Modeling Chua Shyan Jin, Ronald Assoc. Prof Gerard Leng Aeronautical Engineering Group, NUS Abstract A GPS system for the autonomous navigation and surveillance of an airship
Jager UAVs to Locate GPS Interference
 JIFX 16-1 2-6 November 2015 Camp Roberts, CA Jager UAVs to Locate GPS Interference Stanford GPS Research Laboratory and the Stanford Intelligent Systems Lab Principal Investigator: Sherman Lo, PhD Area
JIFX 16-1 2-6 November 2015 Camp Roberts, CA Jager UAVs to Locate GPS Interference Stanford GPS Research Laboratory and the Stanford Intelligent Systems Lab Principal Investigator: Sherman Lo, PhD Area
Jammer Acquisition with GPS Exploration and Reconnaissance JÄGER
 Jammer Acquisition with GPS Exploration and Reconnaissance JÄGER SCPNT PRESENTATION Adrien Perkins James Spicer, Louis Dressel, Mark James, and Yu-Hsuan Chen !Motivation NextGen Airspace Increasing use
Jammer Acquisition with GPS Exploration and Reconnaissance JÄGER SCPNT PRESENTATION Adrien Perkins James Spicer, Louis Dressel, Mark James, and Yu-Hsuan Chen !Motivation NextGen Airspace Increasing use
Mobile Positioning in Wireless Mobile Networks
 Mobile Positioning in Wireless Mobile Networks Peter Brída Department of Telecommunications and Multimedia Faculty of Electrical Engineering University of Žilina SLOVAKIA Outline Why Mobile Positioning?
Mobile Positioning in Wireless Mobile Networks Peter Brída Department of Telecommunications and Multimedia Faculty of Electrical Engineering University of Žilina SLOVAKIA Outline Why Mobile Positioning?
Table of Contents. Introduction 3. Pictorials of the 40 and 50 Systems 4. List of Applicable Acronyms 6
 Table of Contents Introduction 3 Pictorials of the 40 and 50 Systems 4 List of Applicable Acronyms 6 System 40 Modes of Operation 7 System 40 Functional Preflight Procedures 10 System 40 In Flight Procedures
Table of Contents Introduction 3 Pictorials of the 40 and 50 Systems 4 List of Applicable Acronyms 6 System 40 Modes of Operation 7 System 40 Functional Preflight Procedures 10 System 40 In Flight Procedures
Development of a Fixed-Wing Autonomous Aerial Vehicle at Virginia Tech
 Development of a Fixed-Wing Autonomous Aerial Vehicle at Virginia Tech Benjamin Dingus Elizabeth Hoppe Jansen Lee Nicholas Misyak David Pape Justin Ryan Matthew Schivikas Steven Ross Shake Christopher
Development of a Fixed-Wing Autonomous Aerial Vehicle at Virginia Tech Benjamin Dingus Elizabeth Hoppe Jansen Lee Nicholas Misyak David Pape Justin Ryan Matthew Schivikas Steven Ross Shake Christopher
Inertial Sensors. Ellipse 2 Series MINIATURE HIGH PERFORMANCE. Navigation, Motion & Heave Sensing IMU AHRS MRU INS VG
 Ellipse 2 Series MINIATURE HIGH PERFORMANCE Inertial Sensors IMU AHRS MRU INS VG ITAR Free 0.1 RMS Navigation, Motion & Heave Sensing ELLIPSE SERIES sets up new standard for miniature and cost-effective
Ellipse 2 Series MINIATURE HIGH PERFORMANCE Inertial Sensors IMU AHRS MRU INS VG ITAR Free 0.1 RMS Navigation, Motion & Heave Sensing ELLIPSE SERIES sets up new standard for miniature and cost-effective
Inertial Sensors. Ellipse 2 Series MINIATURE HIGH PERFORMANCE. Navigation, Motion & Heave Sensing IMU AHRS MRU INS VG
 Ellipse 2 Series MINIATURE HIGH PERFORMANCE Inertial Sensors IMU AHRS MRU INS VG ITAR Free 0.1 RMS Navigation, Motion & Heave Sensing ELLIPSE SERIES sets up new standard for miniature and cost-effective
Ellipse 2 Series MINIATURE HIGH PERFORMANCE Inertial Sensors IMU AHRS MRU INS VG ITAR Free 0.1 RMS Navigation, Motion & Heave Sensing ELLIPSE SERIES sets up new standard for miniature and cost-effective
Autopilot System Installation & Operation Guide. Guilin Feiyu Electronic Technology Co., Ltd
 2011-11-26 FEIYU TECH FY31AP Autopilot System Installation & Operation Guide Guilin Feiyu Electronic Technology Co., Ltd Rm. C407, Innovation Building, Information Industry Park, Chaoyang Road, Qixing
2011-11-26 FEIYU TECH FY31AP Autopilot System Installation & Operation Guide Guilin Feiyu Electronic Technology Co., Ltd Rm. C407, Innovation Building, Information Industry Park, Chaoyang Road, Qixing
MULTI AERIAL SYSTEM STABILIZED IN ALTITUDE FOR INFORMATION MANAGEMENT
 Review of the Air Force Academy No (7) 4 MULTI AERIAL SYSTEM STABILIZED IN ALTITUDE FOR INFORMATION MANAGEMENT Vasile PRISACARIU*, Ionică CÎRCIU **, Cătălin CIOACĂ**, Mircea BOŞCOIANU**, Andrei LUCHIAN
Review of the Air Force Academy No (7) 4 MULTI AERIAL SYSTEM STABILIZED IN ALTITUDE FOR INFORMATION MANAGEMENT Vasile PRISACARIU*, Ionică CÎRCIU **, Cătălin CIOACĂ**, Mircea BOŞCOIANU**, Andrei LUCHIAN
3.0 Payload Sensors Subsystem
 3.0 Payload Sensors Subsystem If the C&DH subsystem is the brain of the CubeSat, then the Payload Sensors Subsystem is the eyes and nose of the CubeSat. The payload sensors subsystem consists of several
3.0 Payload Sensors Subsystem If the C&DH subsystem is the brain of the CubeSat, then the Payload Sensors Subsystem is the eyes and nose of the CubeSat. The payload sensors subsystem consists of several
Inertial Sensors. Ellipse Series MINIATURE HIGH PERFORMANCE. Navigation, Motion & Heave Sensing IMU AHRS MRU INS VG
 Ellipse Series MINIATURE HIGH PERFORMANCE Inertial Sensors IMU AHRS MRU INS VG ITAR Free 0.1 RMS Navigation, Motion & Heave Sensing ELLIPSE SERIES sets up new standard for miniature and cost-effective
Ellipse Series MINIATURE HIGH PERFORMANCE Inertial Sensors IMU AHRS MRU INS VG ITAR Free 0.1 RMS Navigation, Motion & Heave Sensing ELLIPSE SERIES sets up new standard for miniature and cost-effective
MULTIPURPOSE QUADCOPTER SOLUTION FOR AGRICULTURE
 MULTIPURPOSE QUADCOPTER SOLUTION FOR AGRICULTURE Powered by COVERS UP TO 30HA AT 70M FLIGHT ALTITUDE PER BATTERY PHOTO & VIDEO FULL HD 1080P - 14MP 3-AXIS STABILIZATION INCLUDES NDVI & ZONING MAPS SERVICE
MULTIPURPOSE QUADCOPTER SOLUTION FOR AGRICULTURE Powered by COVERS UP TO 30HA AT 70M FLIGHT ALTITUDE PER BATTERY PHOTO & VIDEO FULL HD 1080P - 14MP 3-AXIS STABILIZATION INCLUDES NDVI & ZONING MAPS SERVICE
Implementation of Nonlinear Reconfigurable Controllers for Autonomous Unmanned Vehicles
 Implementation of Nonlinear Reconfigurable Controllers for Autonomous Unmanned Vehicles Dere Schmitz Vijayaumar Janardhan S. N. Balarishnan Department of Mechanical and Aerospace engineering and Engineering
Implementation of Nonlinear Reconfigurable Controllers for Autonomous Unmanned Vehicles Dere Schmitz Vijayaumar Janardhan S. N. Balarishnan Department of Mechanical and Aerospace engineering and Engineering
Experimental Cooperative Control of Fixed-Wing Unmanned Aerial Vehicles
 Experimental Cooperative Control of Fixed-Wing Unmanned Aerial Vehicles Selcuk Bayraktar, Georgios E. Fainekos, and George J. Pappas GRASP Laboratory Departments of ESE and CIS University of Pennsylvania
Experimental Cooperative Control of Fixed-Wing Unmanned Aerial Vehicles Selcuk Bayraktar, Georgios E. Fainekos, and George J. Pappas GRASP Laboratory Departments of ESE and CIS University of Pennsylvania
ASSEMBLY OF A REMOTELY PILOTED AIRCRAFT OF LOW COST APPLIED TO AGRICULTURE
 Journal of the Brazilian Association of Agricultural Engineering ISSN: 1809-4430 (on-line) TECHNICAL PAPER ASSEMBLY OF A REMOTELY PILOTED AIRCRAFT OF LOW COST APPLIED TO AGRICULTURE Doi:http://dx.doi.org/10.1590/1809-4430-Eng.Agric.v37n6p1268-1274/2017
Journal of the Brazilian Association of Agricultural Engineering ISSN: 1809-4430 (on-line) TECHNICAL PAPER ASSEMBLY OF A REMOTELY PILOTED AIRCRAFT OF LOW COST APPLIED TO AGRICULTURE Doi:http://dx.doi.org/10.1590/1809-4430-Eng.Agric.v37n6p1268-1274/2017
Attack on the drones. Vectors of attack on small unmanned aerial vehicles Oleg Petrovsky / VB2015 Prague
 Attack on the drones Vectors of attack on small unmanned aerial vehicles Oleg Petrovsky / VB2015 Prague Google trends Google trends This is my drone. There are many like it, but this one is mine. Majority
Attack on the drones Vectors of attack on small unmanned aerial vehicles Oleg Petrovsky / VB2015 Prague Google trends Google trends This is my drone. There are many like it, but this one is mine. Majority
Mizzou UAV Team 2017 AUVSI Student UAS Competition Journal University of Missouri College of Engineering
 Mizzou UAV Team 2017 AUVSI Student UAS Competition Journal University of Missouri College of Engineering Fig. 1 - Sky Tractor Abstract This journal paper presents the design, development, and testing of
Mizzou UAV Team 2017 AUVSI Student UAS Competition Journal University of Missouri College of Engineering Fig. 1 - Sky Tractor Abstract This journal paper presents the design, development, and testing of
Airborne Satellite Communications on the Move Solutions Overview
 Airborne Satellite Communications on the Move Solutions Overview High-Speed Broadband in the Sky The connected aircraft is taking the business of commercial airline to new heights. In-flight systems are
Airborne Satellite Communications on the Move Solutions Overview High-Speed Broadband in the Sky The connected aircraft is taking the business of commercial airline to new heights. In-flight systems are
UAV TOOLKIT APP (BETA/EXPERIMENTAL 0.8) OCT 2015
 OCT 2015") Guide to the UAV Toolkit App (beta/experimental 0.8) October 2015 The UAV Toolkit app is designed for fast, low-cost remote sensing data collection from small, cheap aerial platforms such as UAVs and kites.
Guide to the UAV Toolkit App (beta/experimental 0.8) October 2015 The UAV Toolkit app is designed for fast, low-cost remote sensing data collection from small, cheap aerial platforms such as UAVs and kites.
Wireless Sensor Networks for Aerospace Applications
 SAE 2017 Aerospace Standards Summit th 25-26 April 2017, Cologne, Germany Wireless Sensor Networks for Aerospace Applications Dr. Bahareh Zaghari University of Southampton, UK June 9, 2017 In 1961, the
SAE 2017 Aerospace Standards Summit th 25-26 April 2017, Cologne, Germany Wireless Sensor Networks for Aerospace Applications Dr. Bahareh Zaghari University of Southampton, UK June 9, 2017 In 1961, the
Total Border Security Surveillance
 Total Border Security Surveillance Item Type text; Proceedings Authors Herold, Fredrick W. Publisher International Foundation for Telemetering Journal International Telemetering Conference Proceedings
Total Border Security Surveillance Item Type text; Proceedings Authors Herold, Fredrick W. Publisher International Foundation for Telemetering Journal International Telemetering Conference Proceedings
Hardware in the Loop Simulation for Unmanned Aerial Vehicles
 NATIONAL 1 AEROSPACE LABORATORIES BANGALORE-560 017 INDIA CSIR-NAL Hardware in the Loop Simulation for Unmanned Aerial Vehicles Shikha Jain Kamali C Scientist, Flight Mechanics and Control Division National
NATIONAL 1 AEROSPACE LABORATORIES BANGALORE-560 017 INDIA CSIR-NAL Hardware in the Loop Simulation for Unmanned Aerial Vehicles Shikha Jain Kamali C Scientist, Flight Mechanics and Control Division National
Hardware User Manual. cod: Veronte-HUM-v2.5.docx pag: 1/20
 Hardware User Manual pag: 1/20 pag: 2/20 Table of Contents 1. OVERVIEW... 4 2. AIRCRAFT MOUNTING... 5 2.1.1. ENCLOSURE... 5 2.1.2. MECHANICAL MOUNTING... 5 2.1.3. Vibration Isolation... 6 2.1.4. Location...
Hardware User Manual pag: 1/20 pag: 2/20 Table of Contents 1. OVERVIEW... 4 2. AIRCRAFT MOUNTING... 5 2.1.1. ENCLOSURE... 5 2.1.2. MECHANICAL MOUNTING... 5 2.1.3. Vibration Isolation... 6 2.1.4. Location...
Design and Implementation of FPGA Based Quadcopter
 Design and Implementation of FPGA Based Quadcopter G Premkumar 1 SCSVMV, Kanchipuram, Tamil Nadu, INDIA R Jayalakshmi 2 Assistant Professor, SCSVMV, Kanchipuram, Tamil Nadu, INDIA Md Akramuddin 3 Project
Design and Implementation of FPGA Based Quadcopter G Premkumar 1 SCSVMV, Kanchipuram, Tamil Nadu, INDIA R Jayalakshmi 2 Assistant Professor, SCSVMV, Kanchipuram, Tamil Nadu, INDIA Md Akramuddin 3 Project
AG-VA Fully Autonomous UAV Sprayers
 AG-VA Fully Autonomous UAV Sprayers One of the most advance sprayer technology on the market! Best Price - Best Flight Time - Best Coverage Rate - 1 Yr Warranty* The AG-VA UAV Sprayer is available in 3
AG-VA Fully Autonomous UAV Sprayers One of the most advance sprayer technology on the market! Best Price - Best Flight Time - Best Coverage Rate - 1 Yr Warranty* The AG-VA UAV Sprayer is available in 3
A Telemetry Antenna System for Unmanned Air Vehicles
 Progress In Electromagnetics Research Symposium Proceedings, Cambridge, USA, July 8, 00 6 A Telemetry Antenna System for Unmanned Air Vehicles M. Dogan, and F. Ustuner TUBITAK, UEKAE, Kocaeli, Turkey Sabanci
Progress In Electromagnetics Research Symposium Proceedings, Cambridge, USA, July 8, 00 6 A Telemetry Antenna System for Unmanned Air Vehicles M. Dogan, and F. Ustuner TUBITAK, UEKAE, Kocaeli, Turkey Sabanci
Aerial Photographic System Using an Unmanned Aerial Vehicle
 Aerial Photographic System Using an Unmanned Aerial Vehicle Second Prize Aerial Photographic System Using an Unmanned Aerial Vehicle Institution: Participants: Instructor: Chungbuk National University
Aerial Photographic System Using an Unmanned Aerial Vehicle Second Prize Aerial Photographic System Using an Unmanned Aerial Vehicle Institution: Participants: Instructor: Chungbuk National University
University of Alberta Aerial Robotics Group
 University of Alberta Aerial Robotics Group 2008 AUVSI Student UAS Competition Journal Paper Submission May 28, 2008 Abstract. This paper describes the 2008 foray of the University of Alberta Aerial Robotics
University of Alberta Aerial Robotics Group 2008 AUVSI Student UAS Competition Journal Paper Submission May 28, 2008 Abstract. This paper describes the 2008 foray of the University of Alberta Aerial Robotics
Inertial Sensors. Ellipse Series MINIATURE HIGH PERFORMANCE. Navigation, Motion & Heave Sensing IMU AHRS MRU INS VG
 Ellipse Series MINIATURE HIGH PERFORMANCE Inertial Sensors IMU AHRS MRU INS VG ITAR Free 0.2 RMS Navigation, Motion & Heave Sensing ELLIPSE SERIES sets up new standard for miniature and cost-effective
Ellipse Series MINIATURE HIGH PERFORMANCE Inertial Sensors IMU AHRS MRU INS VG ITAR Free 0.2 RMS Navigation, Motion & Heave Sensing ELLIPSE SERIES sets up new standard for miniature and cost-effective