Air Surveillance Drones. ENSC 305/440 Capstone Project Spring 2014
|
|
|
- Arabella Phelps
- 6 years ago
- Views:
Transcription
1 Air Surveillance Drones ENSC 305/440 Capstone Project Spring 2014
2 Group Members: Armin Samadanian Chief Executive Officer Juan Carlos Diaz Lead Technician and Test Pilot Afshin Nikzat Lead Financial Planner and Lead Builder
3 Introduction Drones are mostly used for military applications They can be used in many other areas such as search and rescue, fire watch, maritime surveillance, security, aerial photography and most other air surveillance applications
4 Motivation Market Need to expand drone s functionality Every year people are lost in places such as mountains and forests The cost of using regular helicopters for search and rescue is around $1800 per hour Mission stops at sunset Solution?

5 Solution Using inexpensive and efficient drones
6 Competitors Mostly consist of quad-copters Much more expensive than our product More risk involved since quad-copters are very dependent on power and loss of power causes loss of device
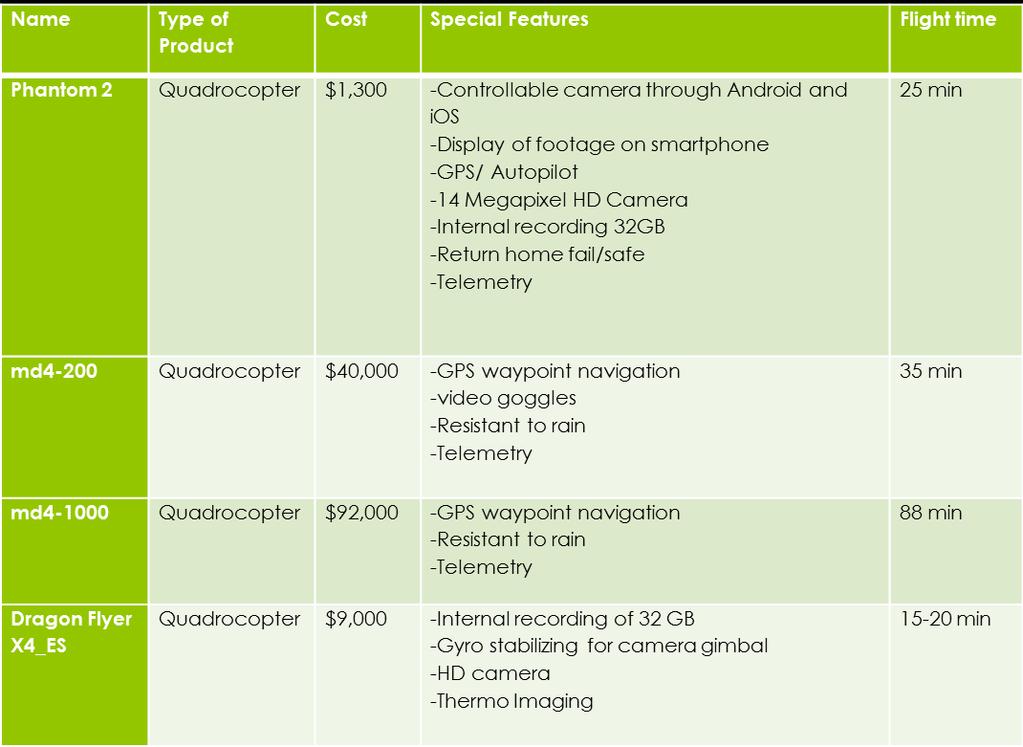
7 Competitors
8 Airplane design Ribs are Symmetrical for to have some aerobatic due to capabilities sudden change of direction Total area on wing: 4920 cm 2, Total weight: 3kg Wing loading ratio is 0.61 grams/cm 2 Aspect ratio is 16:3 Aileron ration to wing area is at minimum 10% Fuselage is mainly made by ply wood to increase strength Wings and other control surfaces are made out of balsa wood

9 Original design
10 Plane Adjustments Wing span Reinforcement of wing Stabilizer Ailerons Landing gear

11 After Adjustments
 Stabilize Autopilot is")


12 System Overview Two modes: 1) Auto 2) Manual 3) Return to launch 4) Stabilize Autopilot is activated by transmitter or computer Another transmitter is used to control the camera movements Video transmitter sends video to LCD mounted on transmitter All location information is sent from airplane to ground station

13 Block Diagram
14 System Breakdown Composed of 4 subsystems: 1) Radio System 2) Autopilot System 3) Video System 4) Power System

15 Radio System Ideal situation using a 9 channel 72MHz FM radio Due to shortage of budget, used 2 6-channel 2.4GHz FM (DX6i Spektrum) transmitter and receiver

16 Autopilot Using ArduPilot platform Includes 3-axis gyroscope, accelerometer and magnetometer External addition of GPS and telemetry Altitude is approximated by detecting change in atmospheric pressure GPS needs to be mounted on the plane so it has direct line of sight to satellites
17
18 Gyroscope data
19 Accelerometer
20 Magnetometer
21 Video System Comprised of video transmitter, receiver, LCD and camera Transmitter and receiver were changed from 2.4 GHz to 5.8 GHz to reduce interference LCD is connected to the receiver and both are mounted on the transmitter (DX6i) Compatible with thermo imaging camera

22 Implementing Video System
23 Complete video system
24 Power System Consists of a 4 cell Li-Po(Lithium Polymer) battery, a 3 cell Li-Po for the video transmitter and camera, and solar cells on the plane The ground station has an 11.1 V battery to power our video receiver and LCD screen
25 Solar Cells First set was too fragile and was damaged during test and mount on the plane plus the manufacturers specifications did not match the output of the panel Second set was successful Aerodynamics of plane are not affected Due to shortage of budget, could not buy enough solar cells Need at least 3 times more solar cells that we have Potentially could make it up to 15.5 volts

26 Testing:

27 First test plane

28 End of first test plane

29 Second Test Plane

30 End of second test plane
31 Successful Test
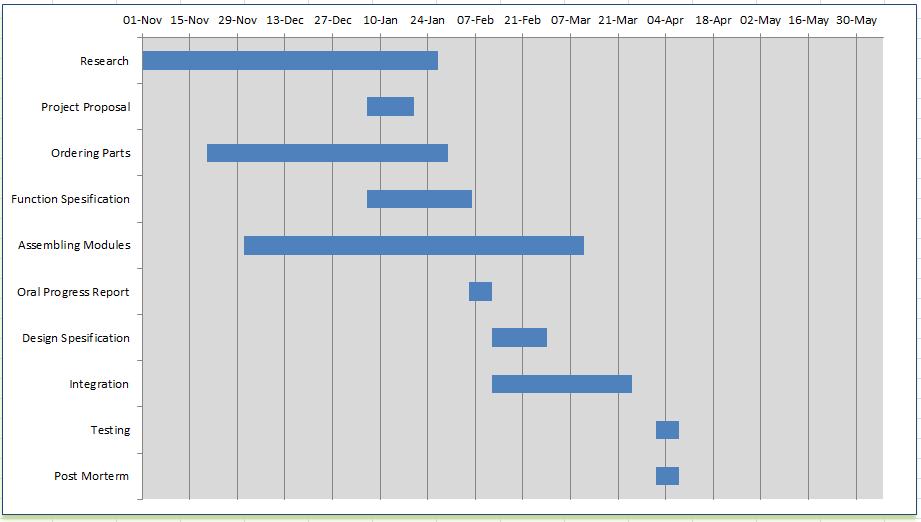
32 Timeline estimation
33 Timeline Milestone Project Planning/Proposal January 19 January 19 Design March 1 March 1 Development, and Unit Test April 3 March 23 Integration and Assembly Test April 10 March 29 Project Closure April 15 March 29
34 Budget Estimation Equipment List Estimated Cost Model Plane Building Materials $350 1 x Boscam Video Receiver (RC GHZ) $50 1 x Boscam Video Transmitter (TS GHZ $60 400mW) 1 x Fat Shark FPV goggles $200 1 x HD night vision FPV camera $75 1 x 9CH FM Radio/Receiver $275 2 x Batteries $100 1 x Solar Cells $130 1 x Engine (Turnigy G46 brushless outrunner 550kv) $50 1 x Autopilot (F-TEK 31AP) $140 1 x UBEK $30 5 x Servos $100 1 x Antennas $40 1 x Cam mount (RC 5.8 GHZ FPV anti-vibration PTZ) $50 Total Cost $1650
35 Cost breakdown Equipment List Estimated Cost Model Plane Building Materials $450 1 x Boscam Video Receiver (RC GHZ) $50 1 x Boscam Video Transmitter (TS GHZ 400mW) $60 1 x 7 LCD Monitor $60 1 x HD night vision FPV camera $75 2 x 6CH Radio/Receiver(Borrowed) $0 2 x Batteries $35 1 x Solar Cells $130 1 x Engine (Turnigy G46 brushless outrunner 550kv) $50 1 x Autopilot (F-TEK 31AP) $96 1 x UBEK $30 5 x Servos $50 1 x Antennas $40 1 x Cam mount (RC 5.8 GHZ FPV anti-vibration PTZ) $50 Total Cost $1176
36 What we learned Acute awareness of the importance of planning and time management. How to better communicate our thought processes and ideas in a group Dynamic Be persistent and never give up no matter how many times you fail Expand our ability to interconnect different systems
37 Future Work Adding a thermo-imaging camera for easier missions Integrate camera control for one person operation An increased range of signals and flight time Making an android application
38 Conclusion Drones can be used in other applications other than military They are a solution to expensive air surveillance Require less personnel to operate
39 References Am Cho; Jihoon Kim; Sanghyo Lee; Sujin Choi; Boram Lee; Bosung Kim; Noha Park; Dongkeon Kim; Changdon Kee.( 2007 Oct.). "Fully automatic taxiing, takeoff and landing of a UAV using a single- antenna GPS receiver only," Control, Automation and Systems, ICCAS '07. International Conference on. [Online], vol., no., pp , doi: /ICCAS Available: Gibbons Media & Research LLC. (2012, July). Drones to the rescue!. Retrieved from ( Gibbons Media & Research LLC, 2012) CBCnews. (2013, September 7). Search and rescue drones tested in b.c.. Retrieved from Draganfly Innovations Inc. (2014). Innovative uav aircraft & aerial video systems. Retrieved from microdrones GmbH. (2014). Key information for md Retrieved from microdrones GmbH. (2014). Key information for md Retrieved from B & H Foto & Electronics Corp. (2014). Dji phantom 2 vision. Retrieved from Daflos, P. (2013, September 7). Drones evaluated for use by b.c. search and rescue read more:
40 Acknowledgments: Special thanks to: Andrew Rawicz Steve Whitmore

41 THANK YOU FOR YOUR TIME QUESTIONS?
Dr. Andrew Rawicz School of Engineering Science Simon Fraser University Burnaby, British Columbia V5A 1S6
 March 10, 2014 Dr. Andrew Rawicz School of Engineering Science Simon Fraser University Burnaby, British Columbia V5A 1S6 Re: ENSC 440 Design Specification for ASD: Air Surveillance Drones Dear Dr. Rawicz,
March 10, 2014 Dr. Andrew Rawicz School of Engineering Science Simon Fraser University Burnaby, British Columbia V5A 1S6 Re: ENSC 440 Design Specification for ASD: Air Surveillance Drones Dear Dr. Rawicz,
TEAM AERO-I TEAM AERO-I JOURNAL PAPER DELHI TECHNOLOGICAL UNIVERSITY Journal paper for IARC 2014
 TEAM AERO-I TEAM AERO-I JOURNAL PAPER DELHI TECHNOLOGICAL UNIVERSITY DELHI TECHNOLOGICAL UNIVERSITY Journal paper for IARC 2014 2014 IARC ABSTRACT The paper gives prominence to the technical details of
TEAM AERO-I TEAM AERO-I JOURNAL PAPER DELHI TECHNOLOGICAL UNIVERSITY DELHI TECHNOLOGICAL UNIVERSITY Journal paper for IARC 2014 2014 IARC ABSTRACT The paper gives prominence to the technical details of
Drones and Ham Radio. Bob Schatzman KD9AAD
 Drones and Ham Radio Bob Schatzman KD9AAD Not Your Childhood RC Toy! Highly Accurate GPS receiver! Magnetic Compass! R/C Transmitter/Receiver! Accelerometers/Gyros! HDTV & HQ Still Camera on a Smart Gimbal!
Drones and Ham Radio Bob Schatzman KD9AAD Not Your Childhood RC Toy! Highly Accurate GPS receiver! Magnetic Compass! R/C Transmitter/Receiver! Accelerometers/Gyros! HDTV & HQ Still Camera on a Smart Gimbal!
AG-VA Fully Autonomous UAV Sprayers
 AG-VA Fully Autonomous UAV Sprayers One of the most advance sprayer technology on the market! Best Price - Best Flight Time - Best Coverage Rate - 1 Yr Warranty* The AG-VA UAV Sprayer is available in 3
AG-VA Fully Autonomous UAV Sprayers One of the most advance sprayer technology on the market! Best Price - Best Flight Time - Best Coverage Rate - 1 Yr Warranty* The AG-VA UAV Sprayer is available in 3
1 P a g e. P13231 UAV Test Bed Setup Manual
 1 P a g e P13231 UAV Test Bed Setup Manual Table of Contents Introduction....3 Wings... 3-4 Pitot Tube....3 Aileron Fault...4 Accelerometers.4 Fuselage.. 5-8 GPS.5 FPV System..5 ArduPilot 7 GoPro 7 Rudder
1 P a g e P13231 UAV Test Bed Setup Manual Table of Contents Introduction....3 Wings... 3-4 Pitot Tube....3 Aileron Fault...4 Accelerometers.4 Fuselage.. 5-8 GPS.5 FPV System..5 ArduPilot 7 GoPro 7 Rudder
IPRO 312: Unmanned Aerial Systems
 IPRO 312: Unmanned Aerial Systems Kay, Vlad, Akshay, Chris, Andrew, Sebastian, Anurag, Ani, Ivo, Roger Dr. Vural Diverse IPRO Group ECE MMAE BME ARCH CS Outline Background Approach Team Research Integration
IPRO 312: Unmanned Aerial Systems Kay, Vlad, Akshay, Chris, Andrew, Sebastian, Anurag, Ani, Ivo, Roger Dr. Vural Diverse IPRO Group ECE MMAE BME ARCH CS Outline Background Approach Team Research Integration
U-Pilot can fly the aircraft using waypoint navigation, even when the GPS signal has been lost by using dead-reckoning navigation. Can also orbit arou
 We offer a complete solution for a user that need to put a payload in a advanced position at low cost completely designed by the Spanish company Airelectronics. Using a standard computer, the user can
We offer a complete solution for a user that need to put a payload in a advanced position at low cost completely designed by the Spanish company Airelectronics. Using a standard computer, the user can
INSTRUCTIONS. 3DR Plane CONTENTS. Thank you for purchasing a 3DR Plane!
 DR Plane INSTRUCTIONS Thank you for purchasing a DR Plane! CONTENTS 1 1 Fuselage Right wing Left wing Horizontal stabilizer Vertical stabilizer Carbon fiber bar 1 1 1 7 8 10 11 1 Audio/video (AV) cable
DR Plane INSTRUCTIONS Thank you for purchasing a DR Plane! CONTENTS 1 1 Fuselage Right wing Left wing Horizontal stabilizer Vertical stabilizer Carbon fiber bar 1 1 1 7 8 10 11 1 Audio/video (AV) cable
FLCS V2.1. AHRS, Autopilot, Gyro Stabilized Gimbals Control, Ground Control Station
 AHRS, Autopilot, Gyro Stabilized Gimbals Control, Ground Control Station The platform provides a high performance basis for electromechanical system control. Originally designed for autonomous aerial vehicle
AHRS, Autopilot, Gyro Stabilized Gimbals Control, Ground Control Station The platform provides a high performance basis for electromechanical system control. Originally designed for autonomous aerial vehicle
Project Number: 13231
 Multidisciplinary Senior Design Conference Kate Gleason College of Engineering Rochester Institute of Technology Rochester, New York 14623 Project Number: 13231 UAV GROUND-STATION AND SEEDED FAULT DETECTION
Multidisciplinary Senior Design Conference Kate Gleason College of Engineering Rochester Institute of Technology Rochester, New York 14623 Project Number: 13231 UAV GROUND-STATION AND SEEDED FAULT DETECTION
Heterogeneous Control of Small Size Unmanned Aerial Vehicles
 Magyar Kutatók 10. Nemzetközi Szimpóziuma 10 th International Symposium of Hungarian Researchers on Computational Intelligence and Informatics Heterogeneous Control of Small Size Unmanned Aerial Vehicles
Magyar Kutatók 10. Nemzetközi Szimpóziuma 10 th International Symposium of Hungarian Researchers on Computational Intelligence and Informatics Heterogeneous Control of Small Size Unmanned Aerial Vehicles
SMART BIRD TEAM UAS JOURNAL PAPER
 SMART BIRD TEAM UAS JOURNAL PAPER 2010 AUVSI STUDENT COMPETITION MARYLAND ECOLE POLYTECHNIQUE DE MONTREAL Summary 1 Introduction... 4 2 Requirements of the competition... 4 3 System Design... 5 3.1 Design
SMART BIRD TEAM UAS JOURNAL PAPER 2010 AUVSI STUDENT COMPETITION MARYLAND ECOLE POLYTECHNIQUE DE MONTREAL Summary 1 Introduction... 4 2 Requirements of the competition... 4 3 System Design... 5 3.1 Design
Aerial Photographic System Using an Unmanned Aerial Vehicle
 Aerial Photographic System Using an Unmanned Aerial Vehicle Second Prize Aerial Photographic System Using an Unmanned Aerial Vehicle Institution: Participants: Instructor: Chungbuk National University
Aerial Photographic System Using an Unmanned Aerial Vehicle Second Prize Aerial Photographic System Using an Unmanned Aerial Vehicle Institution: Participants: Instructor: Chungbuk National University
The brain for the plane is the Airelectronics' U-Pilot flight control system, which is embedded inside the plane's fuselage, leaving a lot of space on
 Airelectronics has developed a new complete solution meeting the needs of the farming science. The completely test Skywalkerplatform has been equipped with both thermal and multispectral cameras to measure
Airelectronics has developed a new complete solution meeting the needs of the farming science. The completely test Skywalkerplatform has been equipped with both thermal and multispectral cameras to measure
ISSUE 5 VOLUME 3 ISSN: INTERNATIONAL JOURNAL FOR ENGINEERING APPLICATIONS AND TECHNOLOGY
 1 IJFEAT INTERNATIONAL JOURNAL FOR ENGINEERING APPLICATIONS AND TECHNOLOGY Agriculture Drone for Fertilizers and Pesticides Spraying Neha S. Morey 1, Pratiksha N. Mehere 2, Komal Hedaoo 3 1 Student, Department
1 IJFEAT INTERNATIONAL JOURNAL FOR ENGINEERING APPLICATIONS AND TECHNOLOGY Agriculture Drone for Fertilizers and Pesticides Spraying Neha S. Morey 1, Pratiksha N. Mehere 2, Komal Hedaoo 3 1 Student, Department
Jammer Acquisition with GPS Exploration and Reconnaissance JÄGER
 Jammer Acquisition with GPS Exploration and Reconnaissance JÄGER SCPNT PRESENTATION Adrien Perkins James Spicer, Louis Dressel, Mark James, and Yu-Hsuan Chen !Motivation NextGen Airspace Increasing use
Jammer Acquisition with GPS Exploration and Reconnaissance JÄGER SCPNT PRESENTATION Adrien Perkins James Spicer, Louis Dressel, Mark James, and Yu-Hsuan Chen !Motivation NextGen Airspace Increasing use
 Tech Notes FPV In response to the request for Tech Notes content I would like to submit the following on the subject of FPV. FPV stands for first person view and refers to broadcasting a live video feed
Tech Notes FPV In response to the request for Tech Notes content I would like to submit the following on the subject of FPV. FPV stands for first person view and refers to broadcasting a live video feed
Classical Control Based Autopilot Design Using PC/104
 Classical Control Based Autopilot Design Using PC/104 Mohammed A. Elsadig, Alneelain University, Dr. Mohammed A. Hussien, Alneelain University. Abstract Many recent papers have been written in unmanned
Classical Control Based Autopilot Design Using PC/104 Mohammed A. Elsadig, Alneelain University, Dr. Mohammed A. Hussien, Alneelain University. Abstract Many recent papers have been written in unmanned
EEL 4665/5666 Intelligent Machines Design Laboratory. Messenger. Final Report. Date: 4/22/14 Name: Revant shah
 EEL 4665/5666 Intelligent Machines Design Laboratory Messenger Final Report Date: 4/22/14 Name: Revant shah E-Mail:revantshah2000@ufl.edu Instructors: Dr. A. Antonio Arroyo Dr. Eric M. Schwartz TAs: Andy
EEL 4665/5666 Intelligent Machines Design Laboratory Messenger Final Report Date: 4/22/14 Name: Revant shah E-Mail:revantshah2000@ufl.edu Instructors: Dr. A. Antonio Arroyo Dr. Eric M. Schwartz TAs: Andy
UAV - UAS TECHNOLOGY BASICS
 UAV - UAS TECHNOLOGY BASICS Dr. István Koller BUTE Department of Networked Systems and Services 2017. október 9., Budapest koller@hit.bme.hu Content 0. Introduction to UAV technology 1. Fixed wing aircraft
UAV - UAS TECHNOLOGY BASICS Dr. István Koller BUTE Department of Networked Systems and Services 2017. október 9., Budapest koller@hit.bme.hu Content 0. Introduction to UAV technology 1. Fixed wing aircraft
Sirius instruction manual
 Sirius instruction manual Thank you for purchasing the eagle wing plane.the sirius is designed for First-Person-Vision (FPV) application spec ifically. Due to the high wingand push prop design, the on-board
Sirius instruction manual Thank you for purchasing the eagle wing plane.the sirius is designed for First-Person-Vision (FPV) application spec ifically. Due to the high wingand push prop design, the on-board
PREDATOR V2 CE RTF FPV KIT USER MANUAL
 Fat Shark 1 RC Vision Systems PREDATOR V2 CE RTF FPV KIT USER MANUAL Revision B 09/21/2013 For more product information, please visit: www.fatshark.com All Rights Reserved Fat Shark 2 RC Vision Systems
Fat Shark 1 RC Vision Systems PREDATOR V2 CE RTF FPV KIT USER MANUAL Revision B 09/21/2013 For more product information, please visit: www.fatshark.com All Rights Reserved Fat Shark 2 RC Vision Systems
Design and Navigation Control of an Advanced Level CANSAT. Mansur ÇELEBİ Aeronautics and Space Technologies Institute Turkish Air Force Academy
 Design and Navigation Control of an Advanced Level CANSAT Mansur ÇELEBİ Aeronautics and Space Technologies Institute Turkish Air Force Academy 1 Introduction Content Advanced Level CanSat Design Airframe
Design and Navigation Control of an Advanced Level CANSAT Mansur ÇELEBİ Aeronautics and Space Technologies Institute Turkish Air Force Academy 1 Introduction Content Advanced Level CanSat Design Airframe
Detrum MSR66A Receiver
 Motion RC User Guide for the Detrum MSR66A Receiver Version 1.0 Contents Review the Receiver s Features... 1 Review the Receiver s Ports and Connection Orientation... 2 Bind the Receiver to a Transmitter
Motion RC User Guide for the Detrum MSR66A Receiver Version 1.0 Contents Review the Receiver s Features... 1 Review the Receiver s Ports and Connection Orientation... 2 Bind the Receiver to a Transmitter
Flight control Set and Kit
 Flight control Set and Kit Quick Start Guide For MegaPirate NG Version 1.2 Thanks for choosing AirStudio flight control electronics. We have created it based on best-in-class software, hardware and our
Flight control Set and Kit Quick Start Guide For MegaPirate NG Version 1.2 Thanks for choosing AirStudio flight control electronics. We have created it based on best-in-class software, hardware and our
드론의제어원리. Professor H.J. Park, Dept. of Mechanical System Design, Seoul National University of Science and Technology.
 드론의제어원리 Professor H.J. Park, Dept. of Mechanical System Design, Seoul National University of Science and Technology. An Unmanned aerial vehicle (UAV) is a Unmanned Aerial Vehicle. UAVs include both autonomous
드론의제어원리 Professor H.J. Park, Dept. of Mechanical System Design, Seoul National University of Science and Technology. An Unmanned aerial vehicle (UAV) is a Unmanned Aerial Vehicle. UAVs include both autonomous
Autopilot System Installation & Operation Guide. Guilin Feiyu Electronic Technology Co., Ltd
 2011-11-26 FEIYU TECH FY31AP Autopilot System Installation & Operation Guide Guilin Feiyu Electronic Technology Co., Ltd Rm. C407, Innovation Building, Information Industry Park, Chaoyang Road, Qixing
2011-11-26 FEIYU TECH FY31AP Autopilot System Installation & Operation Guide Guilin Feiyu Electronic Technology Co., Ltd Rm. C407, Innovation Building, Information Industry Park, Chaoyang Road, Qixing
Lightweight Fixed Wing UAV
 Lightweight Fixed Wing UAV Cindy Xiao, Rijesh Augustine, Andrew Jowsey, Michael G. Lipsett, Duncan G. Elliott University of Alberta Abstract The University of Alberta Aerial Robotics (UAARG) is a student
Lightweight Fixed Wing UAV Cindy Xiao, Rijesh Augustine, Andrew Jowsey, Michael G. Lipsett, Duncan G. Elliott University of Alberta Abstract The University of Alberta Aerial Robotics (UAARG) is a student
OrangeRx R610 Spektrum DSM2 6Ch 2.4Ghz Receiver (w/ Sat Port)
") OrangeRx R610 Spektrum DSM2 6Ch 2.4Ghz Receiver (w/ Sat Port) Hobby King http://www.hobbyking.com/hobbyking/store/ 11965 OrangeRx_R610_Spektrum_DSM2_6Ch_2_4Ghz_Receiver_w_Sat_Port_.html Compatible with
OrangeRx R610 Spektrum DSM2 6Ch 2.4Ghz Receiver (w/ Sat Port) Hobby King http://www.hobbyking.com/hobbyking/store/ 11965 OrangeRx_R610_Spektrum_DSM2_6Ch_2_4Ghz_Receiver_w_Sat_Port_.html Compatible with
New functions and changes summary
 New functions and changes summary A comparison of PitLab & Zbig FPV System versions 2.50 and 2.40 Table of Contents New features...2 OSD and autopilot...2 Navigation modes...2 Routes...2 Takeoff...2 Automatic
New functions and changes summary A comparison of PitLab & Zbig FPV System versions 2.50 and 2.40 Table of Contents New features...2 OSD and autopilot...2 Navigation modes...2 Routes...2 Takeoff...2 Automatic
DESIGN & FABRICATION OF UAV FOR DATA TRANSMISSION. Department of ME, CUET, Bangladesh
 Proceedings of the International Conference on Mechanical Engineering and Renewable Energy 2017 (ICMERE2017) 18 20 December, 2017, Chittagong, Bangladesh ICMERE2017-PI-177 DESIGN & FABRICATION OF UAV FOR
Proceedings of the International Conference on Mechanical Engineering and Renewable Energy 2017 (ICMERE2017) 18 20 December, 2017, Chittagong, Bangladesh ICMERE2017-PI-177 DESIGN & FABRICATION OF UAV FOR
Here are some of the many choices you will be faced with: Brand (Futaba, Spektrum, JR, Hitec, etc.)
") 27 January 2015 Welcome - Bienvenue With so many RC radio systems on the market, and so many features How do you know what radio system is right for you? Choosing your best RC radio requires information
27 January 2015 Welcome - Bienvenue With so many RC radio systems on the market, and so many features How do you know what radio system is right for you? Choosing your best RC radio requires information
HALS-H1 Ground Surveillance & Targeting Helicopter
 ARATOS-SWISS Homeland Security AG & SMA PROGRESS, LLC HALS-H1 Ground Surveillance & Targeting Helicopter Defense, Emergency, Homeland Security (Border Patrol, Pipeline Monitoring)... Automatic detection
ARATOS-SWISS Homeland Security AG & SMA PROGRESS, LLC HALS-H1 Ground Surveillance & Targeting Helicopter Defense, Emergency, Homeland Security (Border Patrol, Pipeline Monitoring)... Automatic detection
Atlas-450 FPV Brushless FPV
 Atlas-450 FPV Brushless FPV Atlas-450 is a kind of micro brushless FPV delta-wing airplane base on the design idea of reliability, safety and concise, her flight time is as long as 20 minutes! Park flying
Atlas-450 FPV Brushless FPV Atlas-450 is a kind of micro brushless FPV delta-wing airplane base on the design idea of reliability, safety and concise, her flight time is as long as 20 minutes! Park flying
Study of M.A.R.S. (Multifunctional Aero-drone for Remote Surveillance)
") Study of M.A.R.S. (Multifunctional Aero-drone for Remote Surveillance) Supriya Bhuran 1, Rohit V. Agrawal 2, Kiran D. Bombe 2, Somiran T. Karmakar 2, Ninad V. Bapat 2 1 Assistant Professor, Dept. Instrumentation,
Study of M.A.R.S. (Multifunctional Aero-drone for Remote Surveillance) Supriya Bhuran 1, Rohit V. Agrawal 2, Kiran D. Bombe 2, Somiran T. Karmakar 2, Ninad V. Bapat 2 1 Assistant Professor, Dept. Instrumentation,
FY-41AP Autopilot & OSD System
 FY-41AP Autopilot & OSD System Installation & Operation Manual (Multi-rotor Version) Guilin Feiyu Electronic Technology Co., Ltd Address: 4 th Floor,YuTaiJie Science Technology Building, Information Industry
FY-41AP Autopilot & OSD System Installation & Operation Manual (Multi-rotor Version) Guilin Feiyu Electronic Technology Co., Ltd Address: 4 th Floor,YuTaiJie Science Technology Building, Information Industry
Augmented Reality and Unmanned Aerial Vehicle Assist in Construction Management
 1570 Augmented Reality and Unmanned Aerial Vehicle Assist in Construction Management Ming-Chang Wen 1 and Shih-Chung Kang 2 1 Department of Civil Engineering, National Taiwan University, email: r02521609@ntu.edu.tw
1570 Augmented Reality and Unmanned Aerial Vehicle Assist in Construction Management Ming-Chang Wen 1 and Shih-Chung Kang 2 1 Department of Civil Engineering, National Taiwan University, email: r02521609@ntu.edu.tw
INTELLIGENT LANDING TECHNIQUE USING ULTRASONIC SENSOR FOR MAV APPLICATIONS
 Volume 114 No. 12 2017, 429-436 ISSN: 1311-8080 (printed version); ISSN: 1314-3395 (on-line version) url: http://www.ijpam.eu ijpam.eu INTELLIGENT LANDING TECHNIQUE USING ULTRASONIC SENSOR FOR MAV APPLICATIONS
Volume 114 No. 12 2017, 429-436 ISSN: 1311-8080 (printed version); ISSN: 1314-3395 (on-line version) url: http://www.ijpam.eu ijpam.eu INTELLIGENT LANDING TECHNIQUE USING ULTRASONIC SENSOR FOR MAV APPLICATIONS
BOSCAM WIRELESS FPV GOGGLE. User Manual GS920
 BOSCAM WIRELESS FPV GOGGLE User Manual GS920 Before using this FPV system, please read this manual carefully and keep it properly for future reference. Contents Notice. Start Guide 1. About Wireless Video
BOSCAM WIRELESS FPV GOGGLE User Manual GS920 Before using this FPV system, please read this manual carefully and keep it properly for future reference. Contents Notice. Start Guide 1. About Wireless Video
Hardware Modeling and Machining for UAV- Based Wideband Radar
 Hardware Modeling and Machining for UAV- Based Wideband Radar By Ryan Tubbs Abstract The Center for Remote Sensing of Ice Sheets (CReSIS) at the University of Kansas is currently implementing wideband
Hardware Modeling and Machining for UAV- Based Wideband Radar By Ryan Tubbs Abstract The Center for Remote Sensing of Ice Sheets (CReSIS) at the University of Kansas is currently implementing wideband
Hardware in the Loop Simulation for Unmanned Aerial Vehicles
 NATIONAL 1 AEROSPACE LABORATORIES BANGALORE-560 017 INDIA CSIR-NAL Hardware in the Loop Simulation for Unmanned Aerial Vehicles Shikha Jain Kamali C Scientist, Flight Mechanics and Control Division National
NATIONAL 1 AEROSPACE LABORATORIES BANGALORE-560 017 INDIA CSIR-NAL Hardware in the Loop Simulation for Unmanned Aerial Vehicles Shikha Jain Kamali C Scientist, Flight Mechanics and Control Division National
S.E.V. Solar Extended Vehicle
 S.E.V. Solar Extended Vehicle EEL 4915 Senior Design II Group #4 University of Central Florida Dr. S. Richie Hamed Alostath Daniel Grainger Frank Niles Sergio Roig Fall 2011 Table of Contents S.E.V. 1.
S.E.V. Solar Extended Vehicle EEL 4915 Senior Design II Group #4 University of Central Florida Dr. S. Richie Hamed Alostath Daniel Grainger Frank Niles Sergio Roig Fall 2011 Table of Contents S.E.V. 1.
FOXTECH Nimbus VTOL. User Manual V1.1
 FOXTECH Nimbus VTOL User Manual V1.1 2018.01 Contents Specifications Basic Theory Introduction Setup and Calibration Assembly Control Surface Calibration Compass and Airspeed Calibration Test Flight Autopilot
FOXTECH Nimbus VTOL User Manual V1.1 2018.01 Contents Specifications Basic Theory Introduction Setup and Calibration Assembly Control Surface Calibration Compass and Airspeed Calibration Test Flight Autopilot
NCUBE: The first Norwegian Student Satellite. Presenters on the AAIA/USU SmallSat: Åge-Raymond Riise Eystein Sæther
 NCUBE: The first Norwegian Student Satellite Presenters on the AAIA/USU SmallSat: Åge-Raymond Riise Eystein Sæther Motivation Build space related competence within: mechanical engineering, electronics,
NCUBE: The first Norwegian Student Satellite Presenters on the AAIA/USU SmallSat: Åge-Raymond Riise Eystein Sæther Motivation Build space related competence within: mechanical engineering, electronics,
Introduction. Overview. Outputs Normal model 4 Delta wing (Elevon) & Flying wing & V-tail 4. Rx states
 & Flying wing & V-tail 4. Rx states") Introduction Thank you for purchasing FrSky S6R/S8R (SxR instead in this manual) multi-function telemetry receiver. Equipped with build-in 3-axis gyroscope and accelerometer, SxR supports various functions.
Introduction Thank you for purchasing FrSky S6R/S8R (SxR instead in this manual) multi-function telemetry receiver. Equipped with build-in 3-axis gyroscope and accelerometer, SxR supports various functions.
THE DEVELOPMENT OF A LOW-COST NAVIGATION SYSTEM USING GPS/RDS TECHNOLOGY
 ICAS 2 CONGRESS THE DEVELOPMENT OF A LOW-COST NAVIGATION SYSTEM USING /RDS TECHNOLOGY Yung-Ren Lin, Wen-Chi Lu, Ming-Hao Yang and Fei-Bin Hsiao Institute of Aeronautics and Astronautics, National Cheng
ICAS 2 CONGRESS THE DEVELOPMENT OF A LOW-COST NAVIGATION SYSTEM USING /RDS TECHNOLOGY Yung-Ren Lin, Wen-Chi Lu, Ming-Hao Yang and Fei-Bin Hsiao Institute of Aeronautics and Astronautics, National Cheng
GPS Flight Control in UAV Operations
 1 Antenna, GPS Flight Control in UAV Operations CHANGDON KEE, AM CHO, JIHOON KIM, HEEKWON NO SEOUL NATIONAL UNIVERSITY GPS provides position and velocity measurements, from which attitude information can
1 Antenna, GPS Flight Control in UAV Operations CHANGDON KEE, AM CHO, JIHOON KIM, HEEKWON NO SEOUL NATIONAL UNIVERSITY GPS provides position and velocity measurements, from which attitude information can
ATTITUDE SD FPV GOGGLE WITH MIG V5 HEAD TRACKING USER MANUAL
 Fat Shark 1 RC Vision Systems ATTITUDE SD FPV GOGGLE WITH MIG V5 HEAD TRACKING USER MANUAL Revision C 03/23/2013 For more product information, please visit: www.fatshark.com All Rights Reserved Fat Shark
Fat Shark 1 RC Vision Systems ATTITUDE SD FPV GOGGLE WITH MIG V5 HEAD TRACKING USER MANUAL Revision C 03/23/2013 For more product information, please visit: www.fatshark.com All Rights Reserved Fat Shark
Jager UAVs to Locate GPS Interference
 JIFX 16-1 2-6 November 2015 Camp Roberts, CA Jager UAVs to Locate GPS Interference Stanford GPS Research Laboratory and the Stanford Intelligent Systems Lab Principal Investigator: Sherman Lo, PhD Area
JIFX 16-1 2-6 November 2015 Camp Roberts, CA Jager UAVs to Locate GPS Interference Stanford GPS Research Laboratory and the Stanford Intelligent Systems Lab Principal Investigator: Sherman Lo, PhD Area
Recent Progress in the Development of On-Board Electronics for Micro Air Vehicles
 Recent Progress in the Development of On-Board Electronics for Micro Air Vehicles Jason Plew Jason Grzywna M. C. Nechyba Jason@mil.ufl.edu number9@mil.ufl.edu Nechyba@mil.ufl.edu Machine Intelligence Lab
Recent Progress in the Development of On-Board Electronics for Micro Air Vehicles Jason Plew Jason Grzywna M. C. Nechyba Jason@mil.ufl.edu number9@mil.ufl.edu Nechyba@mil.ufl.edu Machine Intelligence Lab
ASSEMBLY OF A REMOTELY PILOTED AIRCRAFT OF LOW COST APPLIED TO AGRICULTURE
 Journal of the Brazilian Association of Agricultural Engineering ISSN: 1809-4430 (on-line) TECHNICAL PAPER ASSEMBLY OF A REMOTELY PILOTED AIRCRAFT OF LOW COST APPLIED TO AGRICULTURE Doi:http://dx.doi.org/10.1590/1809-4430-Eng.Agric.v37n6p1268-1274/2017
Journal of the Brazilian Association of Agricultural Engineering ISSN: 1809-4430 (on-line) TECHNICAL PAPER ASSEMBLY OF A REMOTELY PILOTED AIRCRAFT OF LOW COST APPLIED TO AGRICULTURE Doi:http://dx.doi.org/10.1590/1809-4430-Eng.Agric.v37n6p1268-1274/2017
North Carolina State University Aerial Robotics Club
 North Carolina State University Aerial Robotics Club 2007 AUVSI Student UAS Competition Journal Paper Entry June 1, 2007 by Matthew Hazard (NCSU 08) with thanks to Alan Stewart and James Scoggins NCSU
North Carolina State University Aerial Robotics Club 2007 AUVSI Student UAS Competition Journal Paper Entry June 1, 2007 by Matthew Hazard (NCSU 08) with thanks to Alan Stewart and James Scoggins NCSU
Mississippi State University Unmanned Aerial Vehicle Entry into the AUVSI 2004 Student UAV Competition
 Mississippi State University Unmanned Aerial Vehicle Entry into the AUVSI 2004 Student UAV Competition Ian Broussard Cornelia Hayes Kelly Lancaster Craig Ross Blake Sanders Mississippi State University
Mississippi State University Unmanned Aerial Vehicle Entry into the AUVSI 2004 Student UAV Competition Ian Broussard Cornelia Hayes Kelly Lancaster Craig Ross Blake Sanders Mississippi State University
PREDATOR V2 RTF FPV KIT USER MANUAL
 Fat Shark 1 RC Vision Systems PREDATOR V2 RTF FPV KIT USER MANUAL Revision C 09/09/2013 For more product information, please visit: www.fatshark.com All Rights Reserved Fat Shark 2 RC Vision Systems Contents
Fat Shark 1 RC Vision Systems PREDATOR V2 RTF FPV KIT USER MANUAL Revision C 09/09/2013 For more product information, please visit: www.fatshark.com All Rights Reserved Fat Shark 2 RC Vision Systems Contents
Development of a Fixed-Wing Autonomous Aerial Vehicle at Virginia Tech
 Development of a Fixed-Wing Autonomous Aerial Vehicle at Virginia Tech Benjamin Dingus Elizabeth Hoppe Jansen Lee Nicholas Misyak David Pape Justin Ryan Matthew Schivikas Steven Ross Shake Christopher
Development of a Fixed-Wing Autonomous Aerial Vehicle at Virginia Tech Benjamin Dingus Elizabeth Hoppe Jansen Lee Nicholas Misyak David Pape Justin Ryan Matthew Schivikas Steven Ross Shake Christopher
SELF STABILIZING PLATFORM
 SELF STABILIZING PLATFORM Shalaka Turalkar 1, Omkar Padvekar 2, Nikhil Chavan 3, Pritam Sawant 4 and Project Guide: Mr Prathamesh Indulkar 5. 1,2,3,4,5 Department of Electronics and Telecommunication,
SELF STABILIZING PLATFORM Shalaka Turalkar 1, Omkar Padvekar 2, Nikhil Chavan 3, Pritam Sawant 4 and Project Guide: Mr Prathamesh Indulkar 5. 1,2,3,4,5 Department of Electronics and Telecommunication,
Arkbird Hummingbird BNF Version Airplane User Manual Caution
 Arkbird Hummingbird BNF Version Airplane User Manual Caution 1) Please abide by relevant laws: No flying in populated area, no flying in airport clearance area (10km away from both sides of the runway,
Arkbird Hummingbird BNF Version Airplane User Manual Caution 1) Please abide by relevant laws: No flying in populated area, no flying in airport clearance area (10km away from both sides of the runway,
F-104 Electronic Systems
 Information regarding the Lockheed F-104 Starfighter F-104 Electronic Systems An article published in the Zipper Magazine # 49 March-2002 Author: Country: Website: Email: Theo N.M.M. Stoelinga The Netherlands
Information regarding the Lockheed F-104 Starfighter F-104 Electronic Systems An article published in the Zipper Magazine # 49 March-2002 Author: Country: Website: Email: Theo N.M.M. Stoelinga The Netherlands
August/5/2010 FY-20A FLIGHT STABILIZATION SYSTEM TECH INSTALLATION & OPERATION MANUAL
 August/5/2010 FEIYU TECH FY-20A FLIGHT STABILIZATION SYSTEM INSTALLATION & OPERATION MANUAL Dear Pilot, Thank you for purchasing the FY-20A stabilizer from FeiYu Tech. In order to achieve full potential
August/5/2010 FEIYU TECH FY-20A FLIGHT STABILIZATION SYSTEM INSTALLATION & OPERATION MANUAL Dear Pilot, Thank you for purchasing the FY-20A stabilizer from FeiYu Tech. In order to achieve full potential
Unmanned Aerial Vehicle Data Acquisition for Damage Assessment in. Hurricane Events
 Unmanned Aerial Vehicle Data Acquisition for Damage Assessment in Hurricane Events Stuart M. Adams a Carol J. Friedland b and Marc L. Levitan c ABSTRACT This paper examines techniques for data collection
Unmanned Aerial Vehicle Data Acquisition for Damage Assessment in Hurricane Events Stuart M. Adams a Carol J. Friedland b and Marc L. Levitan c ABSTRACT This paper examines techniques for data collection
Construction of unmanned aerial vehicle based on remote controls models, open source autopilot projects and commercial off-the-shelf equipment.
 UAV Project Construction of unmanned aerial vehicle based on remote controls models, open source autopilot projects and commercial off-the-shelf equipment. von Olav Strehl Abstract Contents Table of contents...........................................
UAV Project Construction of unmanned aerial vehicle based on remote controls models, open source autopilot projects and commercial off-the-shelf equipment. von Olav Strehl Abstract Contents Table of contents...........................................
2007 AUVSI Competition Paper Near Space Unmanned Aerial Vehicle (NSUAV) Of
 Of") 1 2007 AUVSI Competition Paper Near Space Unmanned Aerial Vehicle (NSUAV) Of University of Colorado at Colorado Springs (UCCS) Plane in flight June 9, 2007 Faculty Advisor: Dr. David Schmidt Team Members:
1 2007 AUVSI Competition Paper Near Space Unmanned Aerial Vehicle (NSUAV) Of University of Colorado at Colorado Springs (UCCS) Plane in flight June 9, 2007 Faculty Advisor: Dr. David Schmidt Team Members:
DATA ACQUISITION SYSTEM & VISUAL SURVEILLANCE AT REMOTE LOCATIONS USING QUAD COPTER
 DATA ACQUISITION SYSTEM & VISUAL SURVEILLANCE AT REMOTE LOCATIONS USING QUAD COPTER Aniruddha S. Joshi 1, Iliyas A. Shaikh 2, Dattatray M. Paul 3, Nikhil R. Patil 4, D. K. Shedge 5 1 Department of Electronics
DATA ACQUISITION SYSTEM & VISUAL SURVEILLANCE AT REMOTE LOCATIONS USING QUAD COPTER Aniruddha S. Joshi 1, Iliyas A. Shaikh 2, Dattatray M. Paul 3, Nikhil R. Patil 4, D. K. Shedge 5 1 Department of Electronics
DISCO-PRO AG ALL-IN-ONE DRONE SOLUTION FOR PRECISION AGRICULTURE. 80ha COVERAGE PARROT SEQUOIA INCLUDES MULTI-PURPOSE TOOL SAFE ANALYZE & DECIDE
 DISCO-PRO AG ALL-IN-ONE DRONE SOLUTION FOR PRECISION AGRICULTURE Powered by 80ha COVERAGE AT 120M * FLIGHT ALTITUDE (200AC @ 400FT) MULTI-PURPOSE TOOL PHOTO 14MPX VIDEO 1080P FULL HD PARROT SEQUOIA RGB
DISCO-PRO AG ALL-IN-ONE DRONE SOLUTION FOR PRECISION AGRICULTURE Powered by 80ha COVERAGE AT 120M * FLIGHT ALTITUDE (200AC @ 400FT) MULTI-PURPOSE TOOL PHOTO 14MPX VIDEO 1080P FULL HD PARROT SEQUOIA RGB
AUVSI SEAFARER Engineering Journal Paper UAV Gilman : Gilman School - Apex
 AUVSI SEAFARER Engineering Journal Paper UAV Gilman : Gilman School - Apex Abstract The AUVSI SEAFARER Competition challenges undergraduate and high school students to design, build, and use an Unmanned
AUVSI SEAFARER Engineering Journal Paper UAV Gilman : Gilman School - Apex Abstract The AUVSI SEAFARER Competition challenges undergraduate and high school students to design, build, and use an Unmanned
Development of an Autonomous Aerial Reconnaissance System
 Development of an Autonomous Aerial Reconnaissance System Jessica Dooley, Ekaterina Taralova, Prasad Gabbur, Timothy Spriggs University of Arizona Tucson, AZ ABSTRACT In preparation for the 2003 International
Development of an Autonomous Aerial Reconnaissance System Jessica Dooley, Ekaterina Taralova, Prasad Gabbur, Timothy Spriggs University of Arizona Tucson, AZ ABSTRACT In preparation for the 2003 International
KySat-2: Status Report and Overview of C&DH and Communications Systems Design
 KySat-2: Status Report and Overview of C&DH and Communications Systems Design Jason Rexroat University of Kentucky Kevin Brown Morehead State University Twyman Clements Kentucky Space LLC 1 Overview Mission
KySat-2: Status Report and Overview of C&DH and Communications Systems Design Jason Rexroat University of Kentucky Kevin Brown Morehead State University Twyman Clements Kentucky Space LLC 1 Overview Mission
A Piaggio-inspired park flyer
 Clark Salisbury's SkyTwin A Piaggio-inspired park flyer B efore I discuss building the SkyTwin, I should explain my reasons for designing, building, and flying such an aircraft. I have always been fascinated
Clark Salisbury's SkyTwin A Piaggio-inspired park flyer B efore I discuss building the SkyTwin, I should explain my reasons for designing, building, and flying such an aircraft. I have always been fascinated
SABRE-I: An End-to-End Hands-On CubeSat Experience for the Educate Utilizing CubeSat Experience Program
 SABRE-I: An End-to-End Hs-On CubeSat Experience for the Educate Utilizing CubeSat Experience Program Bungo Shiotani Space Systems Group Dept. of Mechanical & Aerospace Engineering University of Florida
SABRE-I: An End-to-End Hs-On CubeSat Experience for the Educate Utilizing CubeSat Experience Program Bungo Shiotani Space Systems Group Dept. of Mechanical & Aerospace Engineering University of Florida
STORC: SEARCH TO RESCUE CRAFT FINAL TECHNICAL PAPER
 MEAM-446-2012-1 Senior Design Project - Final Report April 26, 2012 Department of Mechanical Engineering and Applied Mechanics School of Engineering and Applied Science The University of Pennsylvania Philadelphia,
MEAM-446-2012-1 Senior Design Project - Final Report April 26, 2012 Department of Mechanical Engineering and Applied Mechanics School of Engineering and Applied Science The University of Pennsylvania Philadelphia,
Lightweight Fixed Wing UAV
 Lightweight Fixed Wing UAV Joseph Patton, Paul Owczarczyk, Mattias Dreger, Jason Bui, Cameron Lee, Cindy Xiao, Rijesh Augustine, Sheldon Marquis, Ryan Kapteyn, Nicholas Kwan Wong, Mark Pollock, Andrew
Lightweight Fixed Wing UAV Joseph Patton, Paul Owczarczyk, Mattias Dreger, Jason Bui, Cameron Lee, Cindy Xiao, Rijesh Augustine, Sheldon Marquis, Ryan Kapteyn, Nicholas Kwan Wong, Mark Pollock, Andrew
A New Capability for Crash Site Documentation
 A New Capability for Crash Site Documentation By Major Adam Cybanski, Directorate of Flight Safety, Ottawa Major Adam Cybanski is the officer responsible for helicopter investigation (DFS 2-4) at the Canadian
A New Capability for Crash Site Documentation By Major Adam Cybanski, Directorate of Flight Safety, Ottawa Major Adam Cybanski is the officer responsible for helicopter investigation (DFS 2-4) at the Canadian
The drone for precision agriculture
 The drone for precision agriculture Reap the benefits of scouting crops from above If precision technology has driven the farming revolution of recent years, monitoring crops from the sky will drive the
The drone for precision agriculture Reap the benefits of scouting crops from above If precision technology has driven the farming revolution of recent years, monitoring crops from the sky will drive the
A 3D Gesture Based Control Mechanism for Quad-copter
 I J C T A, 9(13) 2016, pp. 6081-6090 International Science Press A 3D Gesture Based Control Mechanism for Quad-copter Adarsh V. 1 and J. Subhashini 2 ABSTRACT Objectives: The quad-copter is one of the
I J C T A, 9(13) 2016, pp. 6081-6090 International Science Press A 3D Gesture Based Control Mechanism for Quad-copter Adarsh V. 1 and J. Subhashini 2 ABSTRACT Objectives: The quad-copter is one of the
MULTIPURPOSE QUADCOPTER SOLUTION FOR AGRICULTURE
 MULTIPURPOSE QUADCOPTER SOLUTION FOR AGRICULTURE Powered by COVERS UP TO 30HA AT 70M FLIGHT ALTITUDE PER BATTERY PHOTO & VIDEO FULL HD 1080P - 14MP 3-AXIS STABILIZATION INCLUDES NDVI & ZONING MAPS SERVICE
MULTIPURPOSE QUADCOPTER SOLUTION FOR AGRICULTURE Powered by COVERS UP TO 30HA AT 70M FLIGHT ALTITUDE PER BATTERY PHOTO & VIDEO FULL HD 1080P - 14MP 3-AXIS STABILIZATION INCLUDES NDVI & ZONING MAPS SERVICE
Skylark OSD V4.0 USER MANUAL
 Skylark OSD V4.0 USER MANUAL A skylark soars above the clouds. SKYLARK OSD V4.0 USER MANUAL New generation of Skylark OSD is developed for the FPV (First Person View) enthusiasts. SKYLARK OSD V4.0 is equipped
Skylark OSD V4.0 USER MANUAL A skylark soars above the clouds. SKYLARK OSD V4.0 USER MANUAL New generation of Skylark OSD is developed for the FPV (First Person View) enthusiasts. SKYLARK OSD V4.0 is equipped
FY-41AP Autopilot & OSD System Installation & Operation Manual
 FY-41AP Autopilot & OSD System Installation & Operation Manual Multi-rotor Version V2.22 And Above Guilin Feiyu Technology Incorporated Company Addr : 3rd Floor,B,Guilin Electric Valley,Innovation Building,
FY-41AP Autopilot & OSD System Installation & Operation Manual Multi-rotor Version V2.22 And Above Guilin Feiyu Technology Incorporated Company Addr : 3rd Floor,B,Guilin Electric Valley,Innovation Building,
2009 Student UAS Competition. Abstract:
 UNIVERSITY OF PUERTO RICO MAYAGUEZ CAMPUS COLLEGE OF ENGINEERING 2009 Student UAS Competition Journal Paper Team Members: Pablo R. Mejías, Merqui Galarza Jeancarlo Colón Naldie Torres Josue Comulada Veronica
UNIVERSITY OF PUERTO RICO MAYAGUEZ CAMPUS COLLEGE OF ENGINEERING 2009 Student UAS Competition Journal Paper Team Members: Pablo R. Mejías, Merqui Galarza Jeancarlo Colón Naldie Torres Josue Comulada Veronica
Autonomous Navigation of a Flying Vehicle on a Predefined Route
 Autonomous Navigation of a Flying Vehicle on a Predefined Route Kostas Mpampos Antonios Gasteratos Department of Production and Management Engineering Democritus University of Thrace University Campus,
Autonomous Navigation of a Flying Vehicle on a Predefined Route Kostas Mpampos Antonios Gasteratos Department of Production and Management Engineering Democritus University of Thrace University Campus,
The Research of Real-Time UAV Inspection System for Photovoltaic Power Station Based on 4G Private Network
 Journal of Computers Vol. 28, No. 2, 2017, pp. 189-196 doi:10.3966/199115592017042802014 The Research of Real-Time UAV Inspection System for Photovoltaic Power Station Based on 4G Private Network Mei-Ling
Journal of Computers Vol. 28, No. 2, 2017, pp. 189-196 doi:10.3966/199115592017042802014 The Research of Real-Time UAV Inspection System for Photovoltaic Power Station Based on 4G Private Network Mei-Ling
Hyperion 7-channel Stabilized Receiver
 Hyperion 7-channel Stabilized Receiver This is not a Horizon Hobbies DSM2, DSMX product, and is not manufactured or endorsed by Horizon Hobbies LLC. DSM2, and DSMX are registered trademarks of Horizon
Hyperion 7-channel Stabilized Receiver This is not a Horizon Hobbies DSM2, DSMX product, and is not manufactured or endorsed by Horizon Hobbies LLC. DSM2, and DSMX are registered trademarks of Horizon
UP30 UAV Autopilot System Manual Version 5.7
 UP30 UAV Autopilot System Manual Version 5.7-0 - CONTENTS Warning, warranty and upgrade.....3 Warning....... 3 Warranty...... 3 Upgrade....... 3 Contact..... 4 Introduction to UP30 Autopilot System....
UP30 UAV Autopilot System Manual Version 5.7-0 - CONTENTS Warning, warranty and upgrade.....3 Warning....... 3 Warranty...... 3 Upgrade....... 3 Contact..... 4 Introduction to UP30 Autopilot System....
Helicopter Aerial Laser Ranging
 Helicopter Aerial Laser Ranging Håkan Sterner TopEye AB P.O.Box 1017, SE-551 11 Jönköping, Sweden 1 Introduction Measuring distances with light has been used for terrestrial surveys since the fifties.
Helicopter Aerial Laser Ranging Håkan Sterner TopEye AB P.O.Box 1017, SE-551 11 Jönköping, Sweden 1 Introduction Measuring distances with light has been used for terrestrial surveys since the fifties.
Members of Panalloon Systems
 Presents SkySeed Members of Panalloon Systems Shayan Azizbeaigi (CFO) Test Engineer o Aerial Netting and Links Sarah Elmasry (COO) o Logistics Software Engineer o Wi-Fi client/server Development o GUI
Presents SkySeed Members of Panalloon Systems Shayan Azizbeaigi (CFO) Test Engineer o Aerial Netting and Links Sarah Elmasry (COO) o Logistics Software Engineer o Wi-Fi client/server Development o GUI
Phantom Dome - Advanced Drone Detection and jamming system
 Phantom Dome - Advanced Drone Detection and jamming system *Picture for illustration only 1 1. The emanating threat of drones In recent years the threat of drones has become increasingly vivid to many
Phantom Dome - Advanced Drone Detection and jamming system *Picture for illustration only 1 1. The emanating threat of drones In recent years the threat of drones has become increasingly vivid to many
FORMOSAT-3/COSMIC Mission Satellite Performance: Five Years in Orbit
 5th FORMOSAT-3 / COSMIC Data Users Workshop and International Conference on GPS Radio Occultation, Taipei, Taiwan, 13~15 April 2011 FORMOSAT-3/COSMIC Mission Satellite Performance: Five Years in Orbit
5th FORMOSAT-3 / COSMIC Data Users Workshop and International Conference on GPS Radio Occultation, Taipei, Taiwan, 13~15 April 2011 FORMOSAT-3/COSMIC Mission Satellite Performance: Five Years in Orbit
PARROT SKYCONTROLLER 2 PARROT COCKPITGLASSES 2 2 POWER BATTERIES
 F P V P A C K L I M I T L E S S F R E E D O M PARROT SKYCONTROLLER 2 PARROT COCKPITGLASSES 2 2 POWER BATTERIES PARROT BEBOP 2 POWER Parrot BEBOP 2 POWER is a compact drone equipped with cutting-edge technology,
F P V P A C K L I M I T L E S S F R E E D O M PARROT SKYCONTROLLER 2 PARROT COCKPITGLASSES 2 2 POWER BATTERIES PARROT BEBOP 2 POWER Parrot BEBOP 2 POWER is a compact drone equipped with cutting-edge technology,
Kodo build guide 1.4
 Kodo build guide 1.4 Please do not share files that you bought Development of a new plane and support of the old ones is very time consuming. Only with your help I can focus fully on this project and spend
Kodo build guide 1.4 Please do not share files that you bought Development of a new plane and support of the old ones is very time consuming. Only with your help I can focus fully on this project and spend
School of Surveying & Spatial Information Systems, UNSW, Sydney, Australia
 Development of an Unmanned Aerial Vehicle Platform Using Multisensor Navigation Technology School of Surveying & Spatial Information Systems, UNSW, Sydney, Australia Gang Sun 1,2, Jiawei Xie 1, Yong Li
Development of an Unmanned Aerial Vehicle Platform Using Multisensor Navigation Technology School of Surveying & Spatial Information Systems, UNSW, Sydney, Australia Gang Sun 1,2, Jiawei Xie 1, Yong Li
Hardware User Manual. cod: Veronte-HUM-v2.3.docx pag: 1/18
 Hardware User Manual pag: 1/18 pag: 2/18 Table of Contents 1. OVERVIEW... 4 2. AIRCRAFT MOUNTING... 5 2.1.1. ENCLOSURE... 5 2.1.2. MECHANICAL MOUNTING... 5 2.1.3. Vibration Isolation... 6 2.1.4. Location...
Hardware User Manual pag: 1/18 pag: 2/18 Table of Contents 1. OVERVIEW... 4 2. AIRCRAFT MOUNTING... 5 2.1.1. ENCLOSURE... 5 2.1.2. MECHANICAL MOUNTING... 5 2.1.3. Vibration Isolation... 6 2.1.4. Location...
PREDATOR FPV GOGGLE USER MANUAL
 PREDATOR FPV GOGGLE USER MANUAL Revision A 10/29/2011 Contents Product contents... 3 Controls... 5 Head tracker... 5 Turnigy 9X Radio Setup.... 6 Futaba Radio setup... 7 Head tracker operation... 7 AV
PREDATOR FPV GOGGLE USER MANUAL Revision A 10/29/2011 Contents Product contents... 3 Controls... 5 Head tracker... 5 Turnigy 9X Radio Setup.... 6 Futaba Radio setup... 7 Head tracker operation... 7 AV
In the summer of 2002, Sub-Orbital Technologies developed a low-altitude
 1.0 Introduction In the summer of 2002, Sub-Orbital Technologies developed a low-altitude CanSat satellite at The University of Texas at Austin. At the end of the project, team members came to the conclusion
1.0 Introduction In the summer of 2002, Sub-Orbital Technologies developed a low-altitude CanSat satellite at The University of Texas at Austin. At the end of the project, team members came to the conclusion
Module 13 Aircraft Aerodynamics, Structures and Systems
 13.1 Theory of Flight (a) Aeroplane Aerodynamics and Flight Controls Operation and effect of: roll control: ailerons and spoilers, pitch control: elevators, stabilators, variable incidence stabilisers
13.1 Theory of Flight (a) Aeroplane Aerodynamics and Flight Controls Operation and effect of: roll control: ailerons and spoilers, pitch control: elevators, stabilators, variable incidence stabilisers
Wireless Copilot. Safe2Fly - Height Only Version. Page NanoQuip Ltd
 Wireless Copilot Safe2Fly - Height Only Version Page Contents Warnings... 3 Features... 4 Specifications... 5 Installation... 6-8 Receiver Battery... 6 Transmitter Installation... 7-8 How to Use This Manual...
Wireless Copilot Safe2Fly - Height Only Version Page Contents Warnings... 3 Features... 4 Specifications... 5 Installation... 6-8 Receiver Battery... 6 Transmitter Installation... 7-8 How to Use This Manual...
Istanbul Technical University Faculty of Aeronautics and Astronautics Space Systems Design and Test Laboratory
 Title: Space Advertiser (S-VERTISE) Primary POC: Aeronautics and Astronautics Engineer Hakan AYKENT Organization: Istanbul Technical University POC email: aykent@itu.edu.tr Need Worldwide companies need
Title: Space Advertiser (S-VERTISE) Primary POC: Aeronautics and Astronautics Engineer Hakan AYKENT Organization: Istanbul Technical University POC email: aykent@itu.edu.tr Need Worldwide companies need
Disaster Countermeasures. Citation Advanced Materials Research, (2013) Trans Tech Publications, S
 Trans Tech Publications, S") NAOSITE: Nagasaki University's Ac Title Author(s) Research and Development of Unmanne Disaster Countermeasures Yamamoto, Ikuo; Inagawa, Naohiro; T Takimoto, Takashi; Iwasaki, Masaaki Citation Advanced
NAOSITE: Nagasaki University's Ac Title Author(s) Research and Development of Unmanne Disaster Countermeasures Yamamoto, Ikuo; Inagawa, Naohiro; T Takimoto, Takashi; Iwasaki, Masaaki Citation Advanced
DEVELOPMENT OF AN AUTONOMOUS SMALL SCALE ELECTRIC CAR
 Jurnal Mekanikal June 2015, Vol 38, 81-91 DEVELOPMENT OF AN AUTONOMOUS SMALL SCALE ELECTRIC CAR Amzar Omairi and Saiful Anuar Abu Bakar* Department of Aeronautics, Automotive and Ocean Engineering Faculty
Jurnal Mekanikal June 2015, Vol 38, 81-91 DEVELOPMENT OF AN AUTONOMOUS SMALL SCALE ELECTRIC CAR Amzar Omairi and Saiful Anuar Abu Bakar* Department of Aeronautics, Automotive and Ocean Engineering Faculty
Tapered Wings. I have attached a documents on tapered wing construction. The round leading edge and constant spars is not a problem.
 TaperedWings Paul: My concerns for the highly tapered wing is the build difficulty and stall characteristics. Remotely piloted aircraft can be difficult to control if the wing isn t built true i.e. free
TaperedWings Paul: My concerns for the highly tapered wing is the build difficulty and stall characteristics. Remotely piloted aircraft can be difficult to control if the wing isn t built true i.e. free
Team Ardra - SEDS VIT
 6f Team Ardra - SEDS VIT VIT University Technical Design Paper for AUVSI Student UAS Competition 2018 Figure 1 Abstract Team Ardra, the UAS team of SEDS-VIT (Students for Exploration and Development of
6f Team Ardra - SEDS VIT VIT University Technical Design Paper for AUVSI Student UAS Competition 2018 Figure 1 Abstract Team Ardra, the UAS team of SEDS-VIT (Students for Exploration and Development of
OPEN EXTENSIVE IOT RESEARCH AND MEASUREMENT INFRASTRUCTURE FOR REMOTE COLLECTION AND AUTOMATIC ANALYSIS OF ENVIRONMENTAL DATA
 TASK QUARTERLY vol. 21, No 4, 2017, pp. 355 363 OPEN EXTENSIVE IOT RESEARCH AND MEASUREMENT INFRASTRUCTURE FOR REMOTE COLLECTION AND AUTOMATIC ANALYSIS OF ENVIRONMENTAL DATA ŁUKASZ WISZNIEWSKI AND DARIUSZ
TASK QUARTERLY vol. 21, No 4, 2017, pp. 355 363 OPEN EXTENSIVE IOT RESEARCH AND MEASUREMENT INFRASTRUCTURE FOR REMOTE COLLECTION AND AUTOMATIC ANALYSIS OF ENVIRONMENTAL DATA ŁUKASZ WISZNIEWSKI AND DARIUSZ