드론의제어원리. Professor H.J. Park, Dept. of Mechanical System Design, Seoul National University of Science and Technology.
|
|
|
- Madlyn Day
- 5 years ago
- Views:
Transcription
 is a Unmanned Aerial Vehicle.")
1 드론의제어원리 Professor H.J. Park, Dept. of Mechanical System Design, Seoul National University of Science and Technology. An Unmanned aerial vehicle (UAV) is a Unmanned Aerial Vehicle. UAVs include both autonomous (means they can do it alone) drones and remotely piloted vehicles (RPVs).

2 CONTENTS 01 드론이란무엇인가? 드론의어원, 역사등을알아본다. 02 드론의분류드론의분류에대하여알아본다. 03 제어원리드론의위치와자세를제어하는원리에대하여알아본다. 04 드론용센서 IMU 센서의원리와센서융합에대하여알아본다. 05 드론의구성예드론을구성하는분품을살펴본다.

3 드론이란무엇인가?



4 Drone 의어원 n 정의 : 영어고어 Drone = male bee = lazy people n 역사 1915: 1 차세계대전중무선조종비행기개발 1935: 영국해군 DH 82B Queen Bee 1939: Radioplane à Drone 영국 DH 82B Queen Bee 정찰및대공무기의 Target 으로활용됨. 미국 Radioplane
 공식이름 UAV/UAS RPAS Mulicopters Quadcopter Hexacopter")
5 공식명칭 n Official Names Unmanned Aerial Vehicle - UAV Unmanned Aerial System UAS Remotely Piloted Aircraft Systems - RPAS UAS 연방항공국 (FAA) 공식이름 UAV/UAS RPAS Mulicopters Quadcopter Hexacopter Octacopter
6 드론의분류
 n 상태결정방법 non-holonomic")
7 2 차원운동 - 차량, 선박 n 2D 상의차량상태 (,, ) 로결정 3 개의구동으로위치 / 자세를임의로결정 à Holonomic ( 구동수 = 상태수 ) n 상태결정방법 non-holonomic Holonomic


8 비행체 n 공간상의비행체상태 (,,,,, ) 로결정 6 개의구동으로 6 개의위치 / 자세를임의로결정 à Holonomic n 상태결정방법 aileron 4 elevator rudder 4 4 non-holonomic

















9 드론의종류 n 분류 UAV Rotor Type Wing type Single Double Triple multi Coax Quad Hexa Octo Fixed wing Hybrid Ornithopter Y4 Y6 X8 Hybrid-X

10 공식 Multi-copter n 로터의수는주로짝수개 회전반작용상쇄에유리
11 제어원리


12 Quadrotor 제어방식 n 4 개의프로펠러회전속도 è 4 개의작용력 è 4 개의운동 Ω, : force 상승운동 Roll 운동,, M movement matrix : torque : torque : torque Yaw 운동 Pitch 운동 M -1 movement matrix Motor speed 4 개의작용력 4 개의운동
 n Roll")
 = + Φ = 4l (Δ ) = Ω =Ω Ω =Ω + Ω =Ω + Ω =Ω Ω =Ω + Ω =Ω + Φ 전진방향 Ω =Ω +")
13 Quadrotor 제어방식 n Throttle 제어 : 방향의가속 기본 Hovering+Δ Ω = Ω + Δ : Ω = Ω + Δ : Ω = Ω + Δ : Ω = Ω + Δ : where Ω : speed required for hovering Ω = 4(Ω + Δ ) n Roll 제어 : 방향의회전가속 Φ Ω = Ω + Δ : Ω = Ω Δ : Ω = Ω Δ : Ω = Ω + Δ : Ω = 4Ω Ω =Ω + = + (Δ ) = + Φ = 4l (Δ ) = Ω =Ω Ω =Ω + Ω =Ω + Ω =Ω Ω =Ω + Ω =Ω + Φ 전진방향 Ω =Ω + 전진방향
14 Quadrotor 제어방식 n Pitch 제어 : 방향의회전가속 Θ 기본 Hovering+Δ Ω = Ω Δ : Ω = Ω Δ : Ω = Ω + Δ : Ω Ω = Ω + Δ : = 4Ω Θ = 4l (Δ ) = Ω =Ω + Θ Ω =Ω Ω =Ω + Ω =Ω 전진방향 n Yaw 제어 : 방향의회전가속 Ψ Ω = Ω + Δ : Ω = Ω Δ : Ω = Ω + Δ : Ω = Ω Δ : Ω = 4Ω Ψ = 4 Δ = Ω =Ω Ω =Ω + Ψ Ω =Ω Ω =Ω + 전진방향
15 Quadrotor 제어시스템 n Overall control system diagram Commands required force required motor speed required PWM,,,,,, Ω, Ω, Ω, Ω,,, Control Algorithm Inverted Movement Matrix Motor Parameters,,, Sensors








16 Quadrotor 제어시스템 n Typical Block diagram GPS Altitude sensors Receiver Bluetooth WiFi Microcontroller AVR, STM32 Ultrasonic Sensor Pressure Sensor 6-AXIS IMU 3-AXIS Accelerometer 3-AXIS Magnetometer ESC, Servo motor 3-AXIS Gyro
17 드론용센서

18 센서융합 (Fusion) n IMU 센서의 Fusion IMU 3x- Accelerometer,, 3x- Gyro sensor Sensor fusion,, 3x- Magnetosensor,, roll, pitch, yaw,, Yaw Roll Pitch

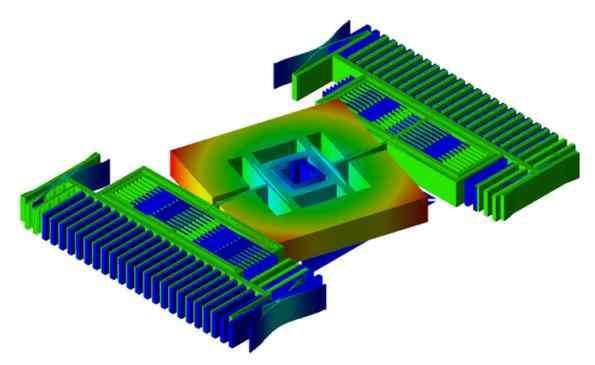
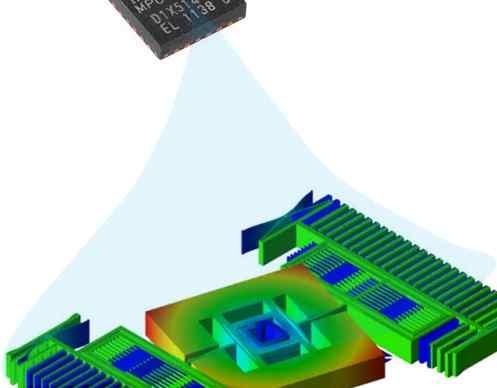
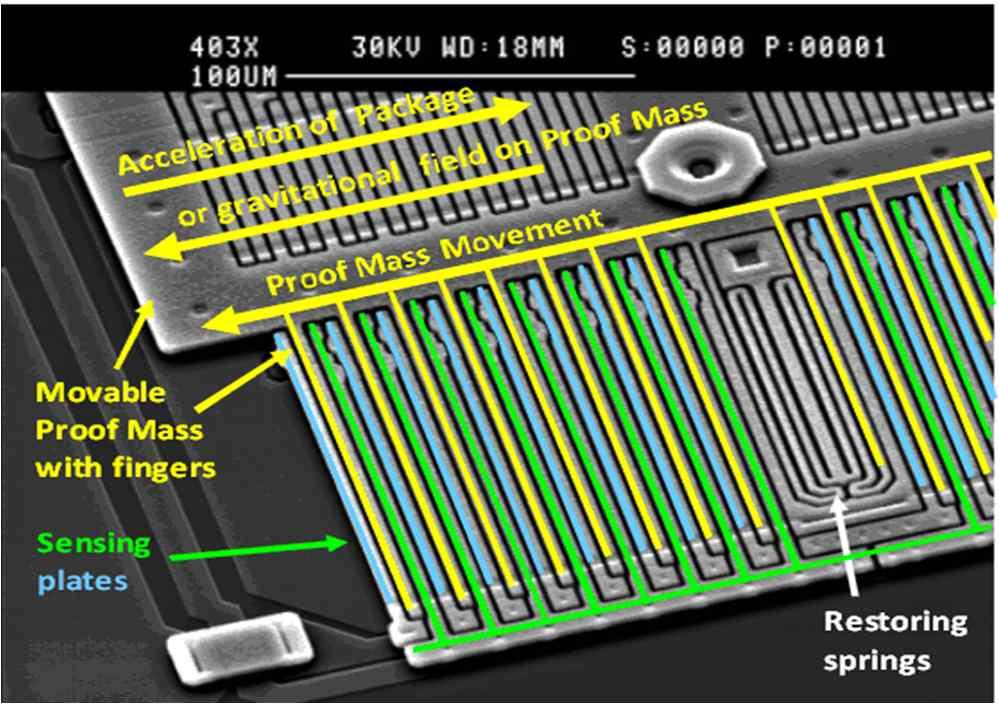


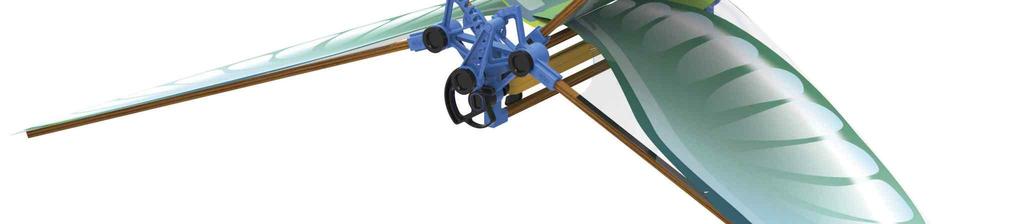
19 MEMS IMU 센서 n 가속도측정센서 mass-spring-capacitance sensor 4x4x0.9 M C MEMS IMU 출처 :

20 MEMS IMU 센서 n MEMS IMU 센서의원리 n 물체가직선운동을시키고회전을시키면 Coriolis force 가발생 = 2 : Coriolis force vector, : rotation vector, : linear velocity vector n 에의한변위를 capacitive 센서로측정 Image credit: Accelerometers.html
21 각도측정의원리 - Accelerometer n 가속도센서를이용한 pitch = 0 인경우 =, = 0 > 0 인경우 = cos, = sin = tan n 문제점 잡음에취약하다. 운동가속도에도영향을받는다. sin 1) = 2) >
22 각도측정의원리 -Gyro n Gyro 센서를이용한 pitch gyro 센서는근본적으로각속도를측정하는센서 를구하려면각속도 를적분 문제점 : Drift 현상 작은오차적분에의하여 error = dt drift
23 센서융합 (Fusion) n 상보 (Complementary) 필터 지자기센서 각속도 결과각도

24 Sensor fusion
25 드론의구성

26 Ardupilot Components 1 Propeller 2 BLDC motor 3 Connectors 4 ESC 5 Li-Po battery 6 Power Distributor 7 8 Servo connector 9 Flight Controller 10 Gimbal Connector 11 Gimbal - Roll 12 Gimbal - Pitch 13 Gimbal 14 GPS 15 RC receiver GHz Antenna 17 RC Transmitter
27 PX4

 drones and remotely")
28 THANK YOU An Unmanned aerial vehicle (UAV) is a Unmanned Aerial Vehicle. UAVs include both autonomous (means they can do it alone) drones and remotely piloted vehicles (RPVs).
Design and Implementation of FPGA Based Quadcopter
 Design and Implementation of FPGA Based Quadcopter G Premkumar 1 SCSVMV, Kanchipuram, Tamil Nadu, INDIA R Jayalakshmi 2 Assistant Professor, SCSVMV, Kanchipuram, Tamil Nadu, INDIA Md Akramuddin 3 Project
Design and Implementation of FPGA Based Quadcopter G Premkumar 1 SCSVMV, Kanchipuram, Tamil Nadu, INDIA R Jayalakshmi 2 Assistant Professor, SCSVMV, Kanchipuram, Tamil Nadu, INDIA Md Akramuddin 3 Project
DESIGN & FABRICATION OF UAV FOR DATA TRANSMISSION. Department of ME, CUET, Bangladesh
 Proceedings of the International Conference on Mechanical Engineering and Renewable Energy 2017 (ICMERE2017) 18 20 December, 2017, Chittagong, Bangladesh ICMERE2017-PI-177 DESIGN & FABRICATION OF UAV FOR
Proceedings of the International Conference on Mechanical Engineering and Renewable Energy 2017 (ICMERE2017) 18 20 December, 2017, Chittagong, Bangladesh ICMERE2017-PI-177 DESIGN & FABRICATION OF UAV FOR
UAV - UAS TECHNOLOGY BASICS
 UAV - UAS TECHNOLOGY BASICS Dr. István Koller BUTE Department of Networked Systems and Services 2017. október 9., Budapest koller@hit.bme.hu Content 0. Introduction to UAV technology 1. Fixed wing aircraft
UAV - UAS TECHNOLOGY BASICS Dr. István Koller BUTE Department of Networked Systems and Services 2017. október 9., Budapest koller@hit.bme.hu Content 0. Introduction to UAV technology 1. Fixed wing aircraft
Introducing the Quadrotor Flying Robot
 Introducing the Quadrotor Flying Robot Roy Brewer Organizer Philadelphia Robotics Meetup Group August 13, 2009 What is a Quadrotor? A vehicle having 4 rotors (propellers) at each end of a square cross
Introducing the Quadrotor Flying Robot Roy Brewer Organizer Philadelphia Robotics Meetup Group August 13, 2009 What is a Quadrotor? A vehicle having 4 rotors (propellers) at each end of a square cross
TEAM AERO-I TEAM AERO-I JOURNAL PAPER DELHI TECHNOLOGICAL UNIVERSITY Journal paper for IARC 2014
 TEAM AERO-I TEAM AERO-I JOURNAL PAPER DELHI TECHNOLOGICAL UNIVERSITY DELHI TECHNOLOGICAL UNIVERSITY Journal paper for IARC 2014 2014 IARC ABSTRACT The paper gives prominence to the technical details of
TEAM AERO-I TEAM AERO-I JOURNAL PAPER DELHI TECHNOLOGICAL UNIVERSITY DELHI TECHNOLOGICAL UNIVERSITY Journal paper for IARC 2014 2014 IARC ABSTRACT The paper gives prominence to the technical details of
FLCS V2.1. AHRS, Autopilot, Gyro Stabilized Gimbals Control, Ground Control Station
 AHRS, Autopilot, Gyro Stabilized Gimbals Control, Ground Control Station The platform provides a high performance basis for electromechanical system control. Originally designed for autonomous aerial vehicle
AHRS, Autopilot, Gyro Stabilized Gimbals Control, Ground Control Station The platform provides a high performance basis for electromechanical system control. Originally designed for autonomous aerial vehicle
Control System Design for Tricopter using Filters and PID controller
 Control System Design for Tricopter using Filters and PID controller Abstract The purpose of this paper is to present the control system design of Tricopter. We have presented the implementation of control
Control System Design for Tricopter using Filters and PID controller Abstract The purpose of this paper is to present the control system design of Tricopter. We have presented the implementation of control
International Journal of Scientific & Engineering Research, Volume 8, Issue 1, January ISSN
 International Journal of Scientific & Engineering Research, Volume 8, Issue 1, January-2017 500 DESIGN AND FABRICATION OF VOICE CONTROLLED UNMANNED AERIAL VEHICLE Author-Shubham Maindarkar, Co-author-
International Journal of Scientific & Engineering Research, Volume 8, Issue 1, January-2017 500 DESIGN AND FABRICATION OF VOICE CONTROLLED UNMANNED AERIAL VEHICLE Author-Shubham Maindarkar, Co-author-
ISSUE 5 VOLUME 3 ISSN: INTERNATIONAL JOURNAL FOR ENGINEERING APPLICATIONS AND TECHNOLOGY
 1 IJFEAT INTERNATIONAL JOURNAL FOR ENGINEERING APPLICATIONS AND TECHNOLOGY Agriculture Drone for Fertilizers and Pesticides Spraying Neha S. Morey 1, Pratiksha N. Mehere 2, Komal Hedaoo 3 1 Student, Department
1 IJFEAT INTERNATIONAL JOURNAL FOR ENGINEERING APPLICATIONS AND TECHNOLOGY Agriculture Drone for Fertilizers and Pesticides Spraying Neha S. Morey 1, Pratiksha N. Mehere 2, Komal Hedaoo 3 1 Student, Department
Products and solutions for Drones
 Products and solutions for Drones Introduction 2 Even though R.P.A.S. (Remotely Piloted Aerial System) or U.A.V. (Unmanned Aerial Vehicle) technologies were initially developed by the military, they are
Products and solutions for Drones Introduction 2 Even though R.P.A.S. (Remotely Piloted Aerial System) or U.A.V. (Unmanned Aerial Vehicle) technologies were initially developed by the military, they are
Classical Control Based Autopilot Design Using PC/104
 Classical Control Based Autopilot Design Using PC/104 Mohammed A. Elsadig, Alneelain University, Dr. Mohammed A. Hussien, Alneelain University. Abstract Many recent papers have been written in unmanned
Classical Control Based Autopilot Design Using PC/104 Mohammed A. Elsadig, Alneelain University, Dr. Mohammed A. Hussien, Alneelain University. Abstract Many recent papers have been written in unmanned
Teleoperation of a Tail-Sitter VTOL UAV
 The 2 IEEE/RSJ International Conference on Intelligent Robots and Systems October 8-22, 2, Taipei, Taiwan Teleoperation of a Tail-Sitter VTOL UAV Ren Suzuki, Takaaki Matsumoto, Atsushi Konno, Yuta Hoshino,
The 2 IEEE/RSJ International Conference on Intelligent Robots and Systems October 8-22, 2, Taipei, Taiwan Teleoperation of a Tail-Sitter VTOL UAV Ren Suzuki, Takaaki Matsumoto, Atsushi Konno, Yuta Hoshino,
Flight control Set and Kit
 Flight control Set and Kit Quick Start Guide For MegaPirate NG Version 1.2 Thanks for choosing AirStudio flight control electronics. We have created it based on best-in-class software, hardware and our
Flight control Set and Kit Quick Start Guide For MegaPirate NG Version 1.2 Thanks for choosing AirStudio flight control electronics. We have created it based on best-in-class software, hardware and our
Location Holding System of Quad Rotor Unmanned Aerial Vehicle(UAV) using Laser Guide Beam
 using Laser Guide Beam") Location Holding System of Quad Rotor Unmanned Aerial Vehicle(UAV) using Laser Guide Beam Wonkyung Jang 1, Masafumi Miwa 2 and Joonhwan Shim 1* 1 Department of Electronics and Communication Engineering,
Location Holding System of Quad Rotor Unmanned Aerial Vehicle(UAV) using Laser Guide Beam Wonkyung Jang 1, Masafumi Miwa 2 and Joonhwan Shim 1* 1 Department of Electronics and Communication Engineering,
A 3D Gesture Based Control Mechanism for Quad-copter
 I J C T A, 9(13) 2016, pp. 6081-6090 International Science Press A 3D Gesture Based Control Mechanism for Quad-copter Adarsh V. 1 and J. Subhashini 2 ABSTRACT Objectives: The quad-copter is one of the
I J C T A, 9(13) 2016, pp. 6081-6090 International Science Press A 3D Gesture Based Control Mechanism for Quad-copter Adarsh V. 1 and J. Subhashini 2 ABSTRACT Objectives: The quad-copter is one of the
Reconnaissance micro UAV system
 Reconnaissance micro UAV system Petr Gabrlik CEITEC Central European Institute of Technology Brno University of Technology 616 00 Brno, Czech Republic Email: petr.gabrlik@ceitec.vutbr.cz Vlastimil Kriz
Reconnaissance micro UAV system Petr Gabrlik CEITEC Central European Institute of Technology Brno University of Technology 616 00 Brno, Czech Republic Email: petr.gabrlik@ceitec.vutbr.cz Vlastimil Kriz
QUADROTOR STABILITY USING PID JULKIFLI BIN AWANG BESAR
 QUADROTOR STABILITY USING PID JULKIFLI BIN AWANG BESAR A project report submitted in partial fulfillment of the requirement for the award of the Master of Electrical Engineering Faculty of Electrical &
QUADROTOR STABILITY USING PID JULKIFLI BIN AWANG BESAR A project report submitted in partial fulfillment of the requirement for the award of the Master of Electrical Engineering Faculty of Electrical &
Design of Self-tuning PID Controller Parameters Using Fuzzy Logic Controller for Quad-rotor Helicopter
 Design of Self-tuning PID Controller Parameters Using Fuzzy Logic Controller for Quad-rotor Helicopter Item type Authors Citation Journal Article Bousbaine, Amar; Bamgbose, Abraham; Poyi, Gwangtim Timothy;
Design of Self-tuning PID Controller Parameters Using Fuzzy Logic Controller for Quad-rotor Helicopter Item type Authors Citation Journal Article Bousbaine, Amar; Bamgbose, Abraham; Poyi, Gwangtim Timothy;
FY-41AP Autopilot & OSD System
 FY-41AP Autopilot & OSD System Installation & Operation Manual (Multi-rotor Version) Guilin Feiyu Electronic Technology Co., Ltd Address: 4 th Floor,YuTaiJie Science Technology Building, Information Industry
FY-41AP Autopilot & OSD System Installation & Operation Manual (Multi-rotor Version) Guilin Feiyu Electronic Technology Co., Ltd Address: 4 th Floor,YuTaiJie Science Technology Building, Information Industry
QUADROTOR ROLL AND PITCH STABILIZATION USING SYSTEM IDENTIFICATION BASED REDESIGN OF EMPIRICAL CONTROLLERS
 QUADROTOR ROLL AND PITCH STABILIZATION USING SYSTEM IDENTIFICATION BASED REDESIGN OF EMPIRICAL CONTROLLERS ANIL UFUK BATMAZ 1, a, OVUNC ELBIR 2,b and COSKU KASNAKOGLU 3,c 1,2,3 Department of Electrical
QUADROTOR ROLL AND PITCH STABILIZATION USING SYSTEM IDENTIFICATION BASED REDESIGN OF EMPIRICAL CONTROLLERS ANIL UFUK BATMAZ 1, a, OVUNC ELBIR 2,b and COSKU KASNAKOGLU 3,c 1,2,3 Department of Electrical
FY-91Q DREAMCATCHER TECH. Multi-rotor flight stabilization & Autopilot System Installation & Operation Guide
 Rev 6: 7 th July 2011 FEIYU TECH FY-91Q DREAMCATCHER Multi-rotor flight stabilization & Autopilot System Installation & Operation Guide Guilin Feiyu Electronic Technology Co., Ltd Rm. B305, Innovation
Rev 6: 7 th July 2011 FEIYU TECH FY-91Q DREAMCATCHER Multi-rotor flight stabilization & Autopilot System Installation & Operation Guide Guilin Feiyu Electronic Technology Co., Ltd Rm. B305, Innovation
OughtToPilot. Project Report of Submission PC128 to 2008 Propeller Design Contest. Jason Edelberg
 OughtToPilot Project Report of Submission PC128 to 2008 Propeller Design Contest Jason Edelberg Table of Contents Project Number.. 3 Project Description.. 4 Schematic 5 Source Code. Attached Separately
OughtToPilot Project Report of Submission PC128 to 2008 Propeller Design Contest Jason Edelberg Table of Contents Project Number.. 3 Project Description.. 4 Schematic 5 Source Code. Attached Separately
ARKBIRD-Tiny Product Features:
 ARKBIRD-Tiny Product Features: ARKBIRD System is a high-accuracy autopilot designed for fixed-wing, which has capability of auto-balancing to ease the manipulation while flying. 1. Function all in one
ARKBIRD-Tiny Product Features: ARKBIRD System is a high-accuracy autopilot designed for fixed-wing, which has capability of auto-balancing to ease the manipulation while flying. 1. Function all in one
FY-41AP Autopilot & OSD System Installation & Operation Manual
 FY-41AP Autopilot & OSD System Installation & Operation Manual Multi-rotor Version V2.22 And Above Guilin Feiyu Technology Incorporated Company Addr : 3rd Floor,B,Guilin Electric Valley,Innovation Building,
FY-41AP Autopilot & OSD System Installation & Operation Manual Multi-rotor Version V2.22 And Above Guilin Feiyu Technology Incorporated Company Addr : 3rd Floor,B,Guilin Electric Valley,Innovation Building,
DATA ACQUISITION SYSTEM & VISUAL SURVEILLANCE AT REMOTE LOCATIONS USING QUAD COPTER
 DATA ACQUISITION SYSTEM & VISUAL SURVEILLANCE AT REMOTE LOCATIONS USING QUAD COPTER Aniruddha S. Joshi 1, Iliyas A. Shaikh 2, Dattatray M. Paul 3, Nikhil R. Patil 4, D. K. Shedge 5 1 Department of Electronics
DATA ACQUISITION SYSTEM & VISUAL SURVEILLANCE AT REMOTE LOCATIONS USING QUAD COPTER Aniruddha S. Joshi 1, Iliyas A. Shaikh 2, Dattatray M. Paul 3, Nikhil R. Patil 4, D. K. Shedge 5 1 Department of Electronics
1 P a g e. P13231 UAV Test Bed Setup Manual
 1 P a g e P13231 UAV Test Bed Setup Manual Table of Contents Introduction....3 Wings... 3-4 Pitot Tube....3 Aileron Fault...4 Accelerometers.4 Fuselage.. 5-8 GPS.5 FPV System..5 ArduPilot 7 GoPro 7 Rudder
1 P a g e P13231 UAV Test Bed Setup Manual Table of Contents Introduction....3 Wings... 3-4 Pitot Tube....3 Aileron Fault...4 Accelerometers.4 Fuselage.. 5-8 GPS.5 FPV System..5 ArduPilot 7 GoPro 7 Rudder
GPS Flight Control in UAV Operations
 1 Antenna, GPS Flight Control in UAV Operations CHANGDON KEE, AM CHO, JIHOON KIM, HEEKWON NO SEOUL NATIONAL UNIVERSITY GPS provides position and velocity measurements, from which attitude information can
1 Antenna, GPS Flight Control in UAV Operations CHANGDON KEE, AM CHO, JIHOON KIM, HEEKWON NO SEOUL NATIONAL UNIVERSITY GPS provides position and velocity measurements, from which attitude information can
FY-DOS Manual For Multi-rotors Control
 FY-DOS Manual For Multi-rotors Control Installation & Operation Multi-rotor firmware above V2.20 Dear Customer: Thank you for choosing DOS as your autopilot system. Please read this manual carefully before
FY-DOS Manual For Multi-rotors Control Installation & Operation Multi-rotor firmware above V2.20 Dear Customer: Thank you for choosing DOS as your autopilot system. Please read this manual carefully before
Frequency-Domain System Identification and Simulation of a Quadrotor Controller
 AIAA SciTech 13-17 January 2014, National Harbor, Maryland AIAA Modeling and Simulation Technologies Conference AIAA 2014-1342 Frequency-Domain System Identification and Simulation of a Quadrotor Controller
AIAA SciTech 13-17 January 2014, National Harbor, Maryland AIAA Modeling and Simulation Technologies Conference AIAA 2014-1342 Frequency-Domain System Identification and Simulation of a Quadrotor Controller
Advanced User Manual
 Features Advanced User Manual Applications BL-3G Ultra stable 3-Axis Gyro Small size, weight and power USB / PC connection for set up and upgrade MEMS rate sensor - Ultra stable over temperature and time
Features Advanced User Manual Applications BL-3G Ultra stable 3-Axis Gyro Small size, weight and power USB / PC connection for set up and upgrade MEMS rate sensor - Ultra stable over temperature and time
The Next Generation Design of Autonomous MAV Flight Control System SmartAP
 The Next Generation Design of Autonomous MAV Flight Control System SmartAP Kirill Shilov Department of Aeromechanics and Flight Engineering Moscow Institute of Physics and Technology 16 Gagarina st, Zhukovsky,
The Next Generation Design of Autonomous MAV Flight Control System SmartAP Kirill Shilov Department of Aeromechanics and Flight Engineering Moscow Institute of Physics and Technology 16 Gagarina st, Zhukovsky,
Caution Notes. Features. Specifications. Installation. A3-L 3-axis Gyro User Manual V1.0
 Caution Notes Thank you for choosing our products. If any difficulties are encountered while setting up or operating it, please consult this manual first. For further help, please don t hesitate to contact
Caution Notes Thank you for choosing our products. If any difficulties are encountered while setting up or operating it, please consult this manual first. For further help, please don t hesitate to contact
YS-S4 Multi-rotor Autopilot User Manual V1.4
 User Manual V1.4 YS-S4 Multi-rotor Autopilot Zero UAV (Beijing) Intelligence Technology Co. Ltd 1 1. In-Box...3 2. Functions... 4 3. Installation... 5 4. Connections...6 4.1 Assembly... 6 4.2 Real connection
User Manual V1.4 YS-S4 Multi-rotor Autopilot Zero UAV (Beijing) Intelligence Technology Co. Ltd 1 1. In-Box...3 2. Functions... 4 3. Installation... 5 4. Connections...6 4.1 Assembly... 6 4.2 Real connection
FY-DOS Manual For Multi-rotors Control
 FY-DOS Manual For Multi-rotors Control Installation & Operation Multi-rotor firmware above V2.10 Dear Customer: Thank you for choosing DOS as your autopilot system. Please read this manual carefully before
FY-DOS Manual For Multi-rotors Control Installation & Operation Multi-rotor firmware above V2.10 Dear Customer: Thank you for choosing DOS as your autopilot system. Please read this manual carefully before
INSTRUCTIONS. 3DR Plane CONTENTS. Thank you for purchasing a 3DR Plane!
 DR Plane INSTRUCTIONS Thank you for purchasing a DR Plane! CONTENTS 1 1 Fuselage Right wing Left wing Horizontal stabilizer Vertical stabilizer Carbon fiber bar 1 1 1 7 8 10 11 1 Audio/video (AV) cable
DR Plane INSTRUCTIONS Thank you for purchasing a DR Plane! CONTENTS 1 1 Fuselage Right wing Left wing Horizontal stabilizer Vertical stabilizer Carbon fiber bar 1 1 1 7 8 10 11 1 Audio/video (AV) cable
Development of Hybrid Flight Simulator with Multi Degree-of-Freedom Robot
 Development of Hybrid Flight Simulator with Multi Degree-of-Freedom Robot Kakizaki Kohei, Nakajima Ryota, Tsukabe Naoki Department of Aerospace Engineering Department of Mechanical System Design Engineering
Development of Hybrid Flight Simulator with Multi Degree-of-Freedom Robot Kakizaki Kohei, Nakajima Ryota, Tsukabe Naoki Department of Aerospace Engineering Department of Mechanical System Design Engineering
Modeling And Pid Cascade Control For Uav Type Quadrotor
 IOSR Journal of Dental and Medical Sciences (IOSR-JDMS) e-issn: 2279-0853, p-issn: 2279-0861.Volume 15, Issue 8 Ver. IX (August. 2016), PP 52-58 www.iosrjournals.org Modeling And Pid Cascade Control For
IOSR Journal of Dental and Medical Sciences (IOSR-JDMS) e-issn: 2279-0853, p-issn: 2279-0861.Volume 15, Issue 8 Ver. IX (August. 2016), PP 52-58 www.iosrjournals.org Modeling And Pid Cascade Control For
Heterogeneous Control of Small Size Unmanned Aerial Vehicles
 Magyar Kutatók 10. Nemzetközi Szimpóziuma 10 th International Symposium of Hungarian Researchers on Computational Intelligence and Informatics Heterogeneous Control of Small Size Unmanned Aerial Vehicles
Magyar Kutatók 10. Nemzetközi Szimpóziuma 10 th International Symposium of Hungarian Researchers on Computational Intelligence and Informatics Heterogeneous Control of Small Size Unmanned Aerial Vehicles
University of Florida. Jordan Street Fred Taylor
 Hercules Autopilot University of Florida TI Innovation Challenge 015 Project Report Team Leader: Team Members: Advising Professor: Video Mentor (if applicable): Jordan Street
Hercules Autopilot University of Florida TI Innovation Challenge 015 Project Report Team Leader: Team Members: Advising Professor: Video Mentor (if applicable): Jordan Street
Design and Navigation Control of an Advanced Level CANSAT. Mansur ÇELEBİ Aeronautics and Space Technologies Institute Turkish Air Force Academy
 Design and Navigation Control of an Advanced Level CANSAT Mansur ÇELEBİ Aeronautics and Space Technologies Institute Turkish Air Force Academy 1 Introduction Content Advanced Level CanSat Design Airframe
Design and Navigation Control of an Advanced Level CANSAT Mansur ÇELEBİ Aeronautics and Space Technologies Institute Turkish Air Force Academy 1 Introduction Content Advanced Level CanSat Design Airframe
SMART BIRD TEAM UAS JOURNAL PAPER
 SMART BIRD TEAM UAS JOURNAL PAPER 2010 AUVSI STUDENT COMPETITION MARYLAND ECOLE POLYTECHNIQUE DE MONTREAL Summary 1 Introduction... 4 2 Requirements of the competition... 4 3 System Design... 5 3.1 Design
SMART BIRD TEAM UAS JOURNAL PAPER 2010 AUVSI STUDENT COMPETITION MARYLAND ECOLE POLYTECHNIQUE DE MONTREAL Summary 1 Introduction... 4 2 Requirements of the competition... 4 3 System Design... 5 3.1 Design
Multi-rotor flight stabilization & Autopilot System Installation & Operation Guide. Guilin Feiyu Electronic Technology Co., Ltd
 Rev: 5 th July 2011 FEIYU TECH FY-91Q DREAMCATCHER Multi-rotor flight stabilization & Autopilot System Installation & Operation Guide Guilin Feiyu Electronic Technology Co., Ltd Rm. B305, Innovation Building,
Rev: 5 th July 2011 FEIYU TECH FY-91Q DREAMCATCHER Multi-rotor flight stabilization & Autopilot System Installation & Operation Guide Guilin Feiyu Electronic Technology Co., Ltd Rm. B305, Innovation Building,
IPRO 312: Unmanned Aerial Systems
 IPRO 312: Unmanned Aerial Systems Kay, Vlad, Akshay, Chris, Andrew, Sebastian, Anurag, Ani, Ivo, Roger Dr. Vural Diverse IPRO Group ECE MMAE BME ARCH CS Outline Background Approach Team Research Integration
IPRO 312: Unmanned Aerial Systems Kay, Vlad, Akshay, Chris, Andrew, Sebastian, Anurag, Ani, Ivo, Roger Dr. Vural Diverse IPRO Group ECE MMAE BME ARCH CS Outline Background Approach Team Research Integration
SELF-AWARE UNMANNED AERIAL VEHICLE
 SELF-AWARE UNMANNED AERIAL VEHICLE COMPUTER ENGINEERING SENIOR PROJECT 2010 http://pisco.flux.utah.edu/uav GRANT E. AYERS grant.ayers@utah.edu NICHOLAS G. MCDONALD nic.mcdonald@utah.edu DECEMBER 23, 2010
SELF-AWARE UNMANNED AERIAL VEHICLE COMPUTER ENGINEERING SENIOR PROJECT 2010 http://pisco.flux.utah.edu/uav GRANT E. AYERS grant.ayers@utah.edu NICHOLAS G. MCDONALD nic.mcdonald@utah.edu DECEMBER 23, 2010
Project Name: Tail-Gator
 EEL 4924 Electrical Engineering Design (Senior Design) Final Report 22 April 2013 Project Name: Tail-Gator Team Name: Eye in the Sky Team Members: Name: Anthony Incardona Name: Fredrik Womack Page 2/14
EEL 4924 Electrical Engineering Design (Senior Design) Final Report 22 April 2013 Project Name: Tail-Gator Team Name: Eye in the Sky Team Members: Name: Anthony Incardona Name: Fredrik Womack Page 2/14
Abstract. Acknowledgments. List of Figures. List of Tables. List of Notations. 1 Introduction Thesis Contributions Thesis Layout...
 Abstract Unmanned aerial vehicles are a salient solution for rapid deployment in disaster relief, search and rescue, and warfare operations. In these scenarios, the agility, maneuverability and speed of
Abstract Unmanned aerial vehicles are a salient solution for rapid deployment in disaster relief, search and rescue, and warfare operations. In these scenarios, the agility, maneuverability and speed of
STUDY OF FIXED WING AIRCRAFT DYNAMICS USING SYSTEM IDENTIFICATION APPROACH
 STUDY OF FIXED WING AIRCRAFT DYNAMICS USING SYSTEM IDENTIFICATION APPROACH A.Kaviyarasu 1, Dr.A.Saravan Kumar 2 1,2 Department of Aerospace Engineering, Madras Institute of Technology, Anna University,
STUDY OF FIXED WING AIRCRAFT DYNAMICS USING SYSTEM IDENTIFICATION APPROACH A.Kaviyarasu 1, Dr.A.Saravan Kumar 2 1,2 Department of Aerospace Engineering, Madras Institute of Technology, Anna University,
X4V2 Flight Controller Manual V1.1
 X4V2 Flight Controller Manual V1.1 Zero UAV (Beijing) Intelligence Technology Co., Ltd. Table of Contents 1 Warning and Disclaimer... 1 2 Terms and Abbreviations... 3 3 Functions... 4 4 In the Box... 5
X4V2 Flight Controller Manual V1.1 Zero UAV (Beijing) Intelligence Technology Co., Ltd. Table of Contents 1 Warning and Disclaimer... 1 2 Terms and Abbreviations... 3 3 Functions... 4 4 In the Box... 5
Multi-Agent Testbed development, modelling and control of Quadrotor UAVs
 Multi-Agent Testbed development, modelling and control of Quadrotor UAVs August 19, 2012 AXEL KLINGENSTEIN Master s Degree Project Stockholm, Sweden 2012 XR-EE-RT 2012:019 January to August 2012 Multi-Agent
Multi-Agent Testbed development, modelling and control of Quadrotor UAVs August 19, 2012 AXEL KLINGENSTEIN Master s Degree Project Stockholm, Sweden 2012 XR-EE-RT 2012:019 January to August 2012 Multi-Agent
FY-DoS for multi-rotors control manual
 FY-DoS for multi-rotors control manual Feiyu Tech Installation & Operation Multi-rotor firmware above V2.10 Dear Customer: Thank you for choosing DoS as your autopilot system. Please read this manual carefully
FY-DoS for multi-rotors control manual Feiyu Tech Installation & Operation Multi-rotor firmware above V2.10 Dear Customer: Thank you for choosing DoS as your autopilot system. Please read this manual carefully
Attack on the drones. Vectors of attack on small unmanned aerial vehicles Oleg Petrovsky / VB2015 Prague
 Attack on the drones Vectors of attack on small unmanned aerial vehicles Oleg Petrovsky / VB2015 Prague Google trends Google trends This is my drone. There are many like it, but this one is mine. Majority
Attack on the drones Vectors of attack on small unmanned aerial vehicles Oleg Petrovsky / VB2015 Prague Google trends Google trends This is my drone. There are many like it, but this one is mine. Majority
Jurnal Teknologi IMPROVEMENT OF QUADROTOR PERFORMANCE WITH FLIGHT CONTROL SYSTEM USING PARTICLE SWARM PROPORTIONAL-INTEGRAL-DERIVATIVE (PS-PID)
") Jurnal Teknologi IMPROVEMENT OF QUADROTOR PERFORMANCE WITH FLIGHT CONTROL SYSTEM USING PARTICLE SWARM PROPORTIONAL-INTEGRAL-DERIVATIVE (PS-PID) Andi Adriansyah a*, Shamsudin H. M. Amin b, Anwar Minarso
Jurnal Teknologi IMPROVEMENT OF QUADROTOR PERFORMANCE WITH FLIGHT CONTROL SYSTEM USING PARTICLE SWARM PROPORTIONAL-INTEGRAL-DERIVATIVE (PS-PID) Andi Adriansyah a*, Shamsudin H. M. Amin b, Anwar Minarso
INTELLIGENT LANDING TECHNIQUE USING ULTRASONIC SENSOR FOR MAV APPLICATIONS
 Volume 114 No. 12 2017, 429-436 ISSN: 1311-8080 (printed version); ISSN: 1314-3395 (on-line version) url: http://www.ijpam.eu ijpam.eu INTELLIGENT LANDING TECHNIQUE USING ULTRASONIC SENSOR FOR MAV APPLICATIONS
Volume 114 No. 12 2017, 429-436 ISSN: 1311-8080 (printed version); ISSN: 1314-3395 (on-line version) url: http://www.ijpam.eu ijpam.eu INTELLIGENT LANDING TECHNIQUE USING ULTRASONIC SENSOR FOR MAV APPLICATIONS
Systematical Methods to Counter Drones in Controlled Manners
 Systematical Methods to Counter Drones in Controlled Manners Wenxin Chen, Garrett Johnson, Yingfei Dong Dept. of Electrical Engineering University of Hawaii 1 System Models u Physical system y Controller
Systematical Methods to Counter Drones in Controlled Manners Wenxin Chen, Garrett Johnson, Yingfei Dong Dept. of Electrical Engineering University of Hawaii 1 System Models u Physical system y Controller
Testing Autonomous Hover Algorithms Using a Quad rotor Helicopter Test Bed
 Testing Autonomous Hover Algorithms Using a Quad rotor Helicopter Test Bed In conjunction with University of Washington Distributed Space Systems Lab Justin Palm Andy Bradford Andrew Nelson Milestone One
Testing Autonomous Hover Algorithms Using a Quad rotor Helicopter Test Bed In conjunction with University of Washington Distributed Space Systems Lab Justin Palm Andy Bradford Andrew Nelson Milestone One
DESIGN CONSTRAINTS ANALYSIS
 TEAM 9 -MRAV DESIGN CONSTRAINTS ANALYSIS by Nick Gentry UPDATED PSSC 1. An ability to remotely monitor remaining battery life (fuel gauge). 2. An ability to hover in a stable position (based on autonomous
TEAM 9 -MRAV DESIGN CONSTRAINTS ANALYSIS by Nick Gentry UPDATED PSSC 1. An ability to remotely monitor remaining battery life (fuel gauge). 2. An ability to hover in a stable position (based on autonomous
FOXTECH Nimbus VTOL. User Manual V1.1
 FOXTECH Nimbus VTOL User Manual V1.1 2018.01 Contents Specifications Basic Theory Introduction Setup and Calibration Assembly Control Surface Calibration Compass and Airspeed Calibration Test Flight Autopilot
FOXTECH Nimbus VTOL User Manual V1.1 2018.01 Contents Specifications Basic Theory Introduction Setup and Calibration Assembly Control Surface Calibration Compass and Airspeed Calibration Test Flight Autopilot
Detrum MSR66A Receiver
 Motion RC User Guide for the Detrum MSR66A Receiver Version 1.0 Contents Review the Receiver s Features... 1 Review the Receiver s Ports and Connection Orientation... 2 Bind the Receiver to a Transmitter
Motion RC User Guide for the Detrum MSR66A Receiver Version 1.0 Contents Review the Receiver s Features... 1 Review the Receiver s Ports and Connection Orientation... 2 Bind the Receiver to a Transmitter
Thank you for purchasing this DJI product. Please strictly follow these steps to mount and connect this system on
 NAZA-M LITE User Manual V 1.00 2013.05.28 Revision For Firmware Version V1.00 & Assistant Software Version V1.00 Thank you for purchasing this DJI product. Please strictly follow these steps to mount and
NAZA-M LITE User Manual V 1.00 2013.05.28 Revision For Firmware Version V1.00 & Assistant Software Version V1.00 Thank you for purchasing this DJI product. Please strictly follow these steps to mount and
INTEGRATION AND IN-FIELD GAINS SELECTION OF FLIGHT AND NAVIGATION CONTROLLER FOR REMOTELY PILOTED AIRCRAFT SYSTEM
 INTEGRATION AND IN-FIELD GAINS SELECTION OF FLIGHT AND NAVIGATION CONTROLLER FOR REMOTELY PILOTED AIRCRAFT SYSTEM Maciej SŁOWIK *, Daniel OŁDZIEJ **, Zdzisław GOSIEWSKI ** * Moose sp z. o.o., Żurawia 71
INTEGRATION AND IN-FIELD GAINS SELECTION OF FLIGHT AND NAVIGATION CONTROLLER FOR REMOTELY PILOTED AIRCRAFT SYSTEM Maciej SŁOWIK *, Daniel OŁDZIEJ **, Zdzisław GOSIEWSKI ** * Moose sp z. o.o., Żurawia 71
Design of a Flight Stabilizer System and Automatic Control Using HIL Test Platform
 Design of a Flight Stabilizer System and Automatic Control Using HIL Test Platform Şeyma Akyürek, Gizem Sezin Özden, Emre Atlas, and Coşku Kasnakoğlu Electrical & Electronics Engineering, TOBB University
Design of a Flight Stabilizer System and Automatic Control Using HIL Test Platform Şeyma Akyürek, Gizem Sezin Özden, Emre Atlas, and Coşku Kasnakoğlu Electrical & Electronics Engineering, TOBB University
OBSTACLE DETECTION AND COLLISION AVOIDANCE USING ULTRASONIC DISTANCE SENSORS FOR AN AUTONOMOUS QUADROCOPTER
 OBSTACLE DETECTION AND COLLISION AVOIDANCE USING ULTRASONIC DISTANCE SENSORS FOR AN AUTONOMOUS QUADROCOPTER Nils Gageik, Thilo Müller, Sergio Montenegro University of Würzburg, Aerospace Information Technology
OBSTACLE DETECTION AND COLLISION AVOIDANCE USING ULTRASONIC DISTANCE SENSORS FOR AN AUTONOMOUS QUADROCOPTER Nils Gageik, Thilo Müller, Sergio Montenegro University of Würzburg, Aerospace Information Technology
AN ALGORITHM FOR OBSTACLE AVOIDANCE CONTROLLER USING ULTRASONIC SENSOR FOR MINI AIRCRAFT APPLICATIONS
 297 AN ALGORITHM FOR OBSTACLE AVOIDANCE CONTROLLER USING ULTRASONIC SENSOR FOR MINI AIRCRAFT APPLICATIONS Shridevi A Mali 1, G Sravanthi 2*, Siva Subba Rao P 3, Raja S 3,Sushma S J 1, A R Reddy 2, 3 1
297 AN ALGORITHM FOR OBSTACLE AVOIDANCE CONTROLLER USING ULTRASONIC SENSOR FOR MINI AIRCRAFT APPLICATIONS Shridevi A Mali 1, G Sravanthi 2*, Siva Subba Rao P 3, Raja S 3,Sushma S J 1, A R Reddy 2, 3 1
Implementation of Nonlinear Reconfigurable Controllers for Autonomous Unmanned Vehicles
 Implementation of Nonlinear Reconfigurable Controllers for Autonomous Unmanned Vehicles Dere Schmitz Vijayaumar Janardhan S. N. Balarishnan Department of Mechanical and Aerospace engineering and Engineering
Implementation of Nonlinear Reconfigurable Controllers for Autonomous Unmanned Vehicles Dere Schmitz Vijayaumar Janardhan S. N. Balarishnan Department of Mechanical and Aerospace engineering and Engineering
Controlling of Quadrotor UAV Using a Fuzzy System for Tuning the PID Gains in Hovering Mode
 1 Controlling of Quadrotor UAV Using a Fuzzy System for Tuning the PID Gains in Hovering ode E. Abbasi 1,. J. ahjoob 2, R. Yazdanpanah 3 Center for echatronics and Automation, School of echanical Engineering
1 Controlling of Quadrotor UAV Using a Fuzzy System for Tuning the PID Gains in Hovering ode E. Abbasi 1,. J. ahjoob 2, R. Yazdanpanah 3 Center for echatronics and Automation, School of echanical Engineering
Multitasking quad copter with hand gesture technology
 Multitasking quad copter with hand gesture technology Siddheshwar Naganath Morde, Vidya Vikas pratisthan institute of Engineering and technology, Solapur University/Maharashtra/India ersid111@gmail.com
Multitasking quad copter with hand gesture technology Siddheshwar Naganath Morde, Vidya Vikas pratisthan institute of Engineering and technology, Solapur University/Maharashtra/India ersid111@gmail.com
ARDUINO BASED CALIBRATION OF AN INERTIAL SENSOR IN VIEW OF A GNSS/IMU INTEGRATION
 Journal of Young Scientist, Volume IV, 2016 ISSN 2344-1283; ISSN CD-ROM 2344-1291; ISSN Online 2344-1305; ISSN-L 2344 1283 ARDUINO BASED CALIBRATION OF AN INERTIAL SENSOR IN VIEW OF A GNSS/IMU INTEGRATION
Journal of Young Scientist, Volume IV, 2016 ISSN 2344-1283; ISSN CD-ROM 2344-1291; ISSN Online 2344-1305; ISSN-L 2344 1283 ARDUINO BASED CALIBRATION OF AN INERTIAL SENSOR IN VIEW OF A GNSS/IMU INTEGRATION
OS3D-FG MINIATURE ATTITUDE & HEADING REFERENCE SYSTEM MINIATURE 3D ORIENTATION SENSOR OS3D-P. Datasheet Rev OS3D-FG Datasheet rev. 2.
 OS3D-FG OS3D-FG MINIATURE ATTITUDE & HEADING REFERENCE SYSTEM MINIATURE 3D ORIENTATION SENSOR OS3D-P Datasheet Rev. 2.0 1 The Inertial Labs OS3D-FG is a multi-purpose miniature 3D orientation sensor Attitude
OS3D-FG OS3D-FG MINIATURE ATTITUDE & HEADING REFERENCE SYSTEM MINIATURE 3D ORIENTATION SENSOR OS3D-P Datasheet Rev. 2.0 1 The Inertial Labs OS3D-FG is a multi-purpose miniature 3D orientation sensor Attitude
STORC: SEARCH TO RESCUE CRAFT FINAL TECHNICAL PAPER
 MEAM-446-2012-1 Senior Design Project - Final Report April 26, 2012 Department of Mechanical Engineering and Applied Mechanics School of Engineering and Applied Science The University of Pennsylvania Philadelphia,
MEAM-446-2012-1 Senior Design Project - Final Report April 26, 2012 Department of Mechanical Engineering and Applied Mechanics School of Engineering and Applied Science The University of Pennsylvania Philadelphia,
The Mathematics of the Stewart Platform
 The Mathematics of the Stewart Platform The Stewart Platform consists of 2 rigid frames connected by 6 variable length legs. The Base is considered to be the reference frame work, with orthogonal axes
The Mathematics of the Stewart Platform The Stewart Platform consists of 2 rigid frames connected by 6 variable length legs. The Base is considered to be the reference frame work, with orthogonal axes
ChRoMicro - Cheap Robotic Microhelicopter HOWTO (EN)
") ChRoMicro - Cheap Robotic Microhelicopter HOWTO (EN) Copyright 2005, 2006, 2007 pabr@pabr.org All rights reserved. RC model helicopter prices have reached a point where all sorts of challenging (i.e. crash-prone)
ChRoMicro - Cheap Robotic Microhelicopter HOWTO (EN) Copyright 2005, 2006, 2007 pabr@pabr.org All rights reserved. RC model helicopter prices have reached a point where all sorts of challenging (i.e. crash-prone)
Air Surveillance Drones. ENSC 305/440 Capstone Project Spring 2014
 Air Surveillance Drones ENSC 305/440 Capstone Project Spring 2014 Group Members: Armin Samadanian Chief Executive Officer Juan Carlos Diaz Lead Technician and Test Pilot Afshin Nikzat Lead Financial Planner
Air Surveillance Drones ENSC 305/440 Capstone Project Spring 2014 Group Members: Armin Samadanian Chief Executive Officer Juan Carlos Diaz Lead Technician and Test Pilot Afshin Nikzat Lead Financial Planner
Construction of unmanned aerial vehicle based on remote controls models, open source autopilot projects and commercial off-the-shelf equipment.
 UAV Project Construction of unmanned aerial vehicle based on remote controls models, open source autopilot projects and commercial off-the-shelf equipment. von Olav Strehl Abstract Contents Table of contents...........................................
UAV Project Construction of unmanned aerial vehicle based on remote controls models, open source autopilot projects and commercial off-the-shelf equipment. von Olav Strehl Abstract Contents Table of contents...........................................
A3 Pro INSTRUCTION MANUAL. Oct 25, 2017 Revision IMPORTANT NOTES
 A3 Pro INSTRUCTION MANUAL Oct 25, 2017 Revision IMPORTANT NOTES 1. Radio controlled (R/C) models are not toys! The propellers rotate at high speed and pose potential risk. They may cause severe injury
A3 Pro INSTRUCTION MANUAL Oct 25, 2017 Revision IMPORTANT NOTES 1. Radio controlled (R/C) models are not toys! The propellers rotate at high speed and pose potential risk. They may cause severe injury
A2 Flight Control System
 A2 Flight Control System User Manual V1.26 April, 2017 Revision Thank you for purchasing DJI products. Please strictly follow these steps to mount and connect this system on your aircraft, install the
A2 Flight Control System User Manual V1.26 April, 2017 Revision Thank you for purchasing DJI products. Please strictly follow these steps to mount and connect this system on your aircraft, install the
August/5/2010 FY-20A FLIGHT STABILIZATION SYSTEM TECH INSTALLATION & OPERATION MANUAL
 August/5/2010 FEIYU TECH FY-20A FLIGHT STABILIZATION SYSTEM INSTALLATION & OPERATION MANUAL Dear Pilot, Thank you for purchasing the FY-20A stabilizer from FeiYu Tech. In order to achieve full potential
August/5/2010 FEIYU TECH FY-20A FLIGHT STABILIZATION SYSTEM INSTALLATION & OPERATION MANUAL Dear Pilot, Thank you for purchasing the FY-20A stabilizer from FeiYu Tech. In order to achieve full potential
UP30 UAV Autopilot System Manual Version 5.7
 UP30 UAV Autopilot System Manual Version 5.7-0 - CONTENTS Warning, warranty and upgrade.....3 Warning....... 3 Warranty...... 3 Upgrade....... 3 Contact..... 4 Introduction to UP30 Autopilot System....
UP30 UAV Autopilot System Manual Version 5.7-0 - CONTENTS Warning, warranty and upgrade.....3 Warning....... 3 Warranty...... 3 Upgrade....... 3 Contact..... 4 Introduction to UP30 Autopilot System....
Oakland University Microraptor 2009 AUVSI Student UAS Competition Entry
 Oakland University Microraptor 2009 AUVSI Student UAS Competition Entry Keith Jones, Maurice Farah, Gentian Godo, Hong Chul Yang, Rami AbouSleiman, and Belal Sababha Faculty Advisor: Dr. Osamah Rawashdeh
Oakland University Microraptor 2009 AUVSI Student UAS Competition Entry Keith Jones, Maurice Farah, Gentian Godo, Hong Chul Yang, Rami AbouSleiman, and Belal Sababha Faculty Advisor: Dr. Osamah Rawashdeh
GPS System Design and Control Modeling. Chua Shyan Jin, Ronald. Assoc. Prof Gerard Leng. Aeronautical Engineering Group, NUS
 GPS System Design and Control Modeling Chua Shyan Jin, Ronald Assoc. Prof Gerard Leng Aeronautical Engineering Group, NUS Abstract A GPS system for the autonomous navigation and surveillance of an airship
GPS System Design and Control Modeling Chua Shyan Jin, Ronald Assoc. Prof Gerard Leng Aeronautical Engineering Group, NUS Abstract A GPS system for the autonomous navigation and surveillance of an airship
Measurement Equipment Development of Stability Evaluation for Joint Slope using Unmaned Aerial Vehicle
 TUNNEL & UNDERGROUND SPACE Vol.28, No.3, 2018, pp.193-208 https://doi.org/10.7474/tus.2018.28.3.193 ISSN: 1225-1275(Print) ISSN: 2287-1748(Online) TECHNICAL NOTES 무인항공기를이용한절리사면의안정성평가계측장비개발 이현철 *, 권기문,
TUNNEL & UNDERGROUND SPACE Vol.28, No.3, 2018, pp.193-208 https://doi.org/10.7474/tus.2018.28.3.193 ISSN: 1225-1275(Print) ISSN: 2287-1748(Online) TECHNICAL NOTES 무인항공기를이용한절리사면의안정성평가계측장비개발 이현철 *, 권기문,
Delhi College of Engineering 2009 AUVSI STUDENT UAS COMPETITION. Team UAS DCE Journal Paper
 Delhi College of Engineering 2009 AUVSI STUDENT UAS COMPETITION Team UAS DCE Journal Paper ABSTRACT The following paper discusses the design and implementation of an Unmanned Aircraft System (UAS) for
Delhi College of Engineering 2009 AUVSI STUDENT UAS COMPETITION Team UAS DCE Journal Paper ABSTRACT The following paper discusses the design and implementation of an Unmanned Aircraft System (UAS) for
A Mini UAV for security environmental monitoring and surveillance: telemetry data analysis
 A Mini UAV for security environmental monitoring and surveillance: telemetry data analysis G. Belloni 2,3, M. Feroli 3, A. Ficola 1, S. Pagnottelli 1,3, P. Valigi 2 1 Department of Electronic and Information
A Mini UAV for security environmental monitoring and surveillance: telemetry data analysis G. Belloni 2,3, M. Feroli 3, A. Ficola 1, S. Pagnottelli 1,3, P. Valigi 2 1 Department of Electronic and Information
Estimation and Control of a Tilt-Quadrotor Attitude
 Estimation and Control of a Tilt-Quadrotor Attitude Estanislao Cantos Mateos Mechanical Engineering Department, Instituto Superior Técnico, Lisboa, E-mail: est8ani@gmail.com Abstract - The aim of the present
Estimation and Control of a Tilt-Quadrotor Attitude Estanislao Cantos Mateos Mechanical Engineering Department, Instituto Superior Técnico, Lisboa, E-mail: est8ani@gmail.com Abstract - The aim of the present
Hardware User Manual. cod: Veronte-HUM-v2.3.docx pag: 1/18
 Hardware User Manual pag: 1/18 pag: 2/18 Table of Contents 1. OVERVIEW... 4 2. AIRCRAFT MOUNTING... 5 2.1.1. ENCLOSURE... 5 2.1.2. MECHANICAL MOUNTING... 5 2.1.3. Vibration Isolation... 6 2.1.4. Location...
Hardware User Manual pag: 1/18 pag: 2/18 Table of Contents 1. OVERVIEW... 4 2. AIRCRAFT MOUNTING... 5 2.1.1. ENCLOSURE... 5 2.1.2. MECHANICAL MOUNTING... 5 2.1.3. Vibration Isolation... 6 2.1.4. Location...
A Simple Approach on Implementing IMU Sensor Fusion in PID Controller for Stabilizing Quadrotor Flight Control
 A Simple Approach on Implementing IMU Sensor Fusion in PID Controller for Stabilizing Quadrotor Flight Control A. Zul Azfar 1, D. Hazry 2 Autonomous System and Machine Vision (AutoMAV) Research Cluster,
A Simple Approach on Implementing IMU Sensor Fusion in PID Controller for Stabilizing Quadrotor Flight Control A. Zul Azfar 1, D. Hazry 2 Autonomous System and Machine Vision (AutoMAV) Research Cluster,
Revision For Firmware Version V3.30 or above & Adjusting-parameter software Version V1.40 or above
 T1 User Manual V1.4 2016.07.20 Revision For Firmware Version V3.30 or above & Adjusting-parameter software Version V1.40 or above Please strictly follow these steps to mount and use this product, as well
T1 User Manual V1.4 2016.07.20 Revision For Firmware Version V3.30 or above & Adjusting-parameter software Version V1.40 or above Please strictly follow these steps to mount and use this product, as well
Experimental Study of Autonomous Target Pursuit with a Micro Fixed Wing Aircraft
 Experimental Study of Autonomous Target Pursuit with a Micro Fixed Wing Aircraft Stanley Ng, Frank Lanke Fu Tarimo, and Mac Schwager Mechanical Engineering Department, Boston University, Boston, MA, 02215
Experimental Study of Autonomous Target Pursuit with a Micro Fixed Wing Aircraft Stanley Ng, Frank Lanke Fu Tarimo, and Mac Schwager Mechanical Engineering Department, Boston University, Boston, MA, 02215
Flight Detector Indicator
 Flight Detector Indicator Part No: 777-1224-003 Components Maintenance Manual No: 34-25-12 By Soumyadeep Das Raj shekhar Chatterjee Purpose of equipment: The flight detector indicator (FDI) is a part of
Flight Detector Indicator Part No: 777-1224-003 Components Maintenance Manual No: 34-25-12 By Soumyadeep Das Raj shekhar Chatterjee Purpose of equipment: The flight detector indicator (FDI) is a part of
DEVELOPMENT OF AN AUTONOMOUS SMALL SCALE ELECTRIC CAR
 Jurnal Mekanikal June 2015, Vol 38, 81-91 DEVELOPMENT OF AN AUTONOMOUS SMALL SCALE ELECTRIC CAR Amzar Omairi and Saiful Anuar Abu Bakar* Department of Aeronautics, Automotive and Ocean Engineering Faculty
Jurnal Mekanikal June 2015, Vol 38, 81-91 DEVELOPMENT OF AN AUTONOMOUS SMALL SCALE ELECTRIC CAR Amzar Omairi and Saiful Anuar Abu Bakar* Department of Aeronautics, Automotive and Ocean Engineering Faculty
Hardware User Manual. cod: Veronte-HUM-v2.5.docx pag: 1/20
 Hardware User Manual pag: 1/20 pag: 2/20 Table of Contents 1. OVERVIEW... 4 2. AIRCRAFT MOUNTING... 5 2.1.1. ENCLOSURE... 5 2.1.2. MECHANICAL MOUNTING... 5 2.1.3. Vibration Isolation... 6 2.1.4. Location...
Hardware User Manual pag: 1/20 pag: 2/20 Table of Contents 1. OVERVIEW... 4 2. AIRCRAFT MOUNTING... 5 2.1.1. ENCLOSURE... 5 2.1.2. MECHANICAL MOUNTING... 5 2.1.3. Vibration Isolation... 6 2.1.4. Location...
Development of a Low Cost Autonomous Indoor Aerial Robotics System V1.0 1 June 2009
 Development of a Low Cost Autonomous Indoor Aerial Robotics System V1.0 1 June 2009 Zack Jarrett Pima Community College Christopher Miller Pima Community College Tete Barrigah University of Arizona Huihong
Development of a Low Cost Autonomous Indoor Aerial Robotics System V1.0 1 June 2009 Zack Jarrett Pima Community College Christopher Miller Pima Community College Tete Barrigah University of Arizona Huihong
User s Guide. SmartAP 2.0 AutoPilot. All rights reserved. 1 SmartAP AutoPilot User s Guide
 1 SmartAP AutoPilot User s Guide SmartAP 2.0 AutoPilot User s Guide All rights reserved 2 SmartAP AutoPilot User s Guide Contents Contents... 2 Introduction... 3 Description... 3 Flight Modes Overview...
1 SmartAP AutoPilot User s Guide SmartAP 2.0 AutoPilot User s Guide All rights reserved 2 SmartAP AutoPilot User s Guide Contents Contents... 2 Introduction... 3 Description... 3 Flight Modes Overview...
Jager UAVs to Locate GPS Interference
 JIFX 16-1 2-6 November 2015 Camp Roberts, CA Jager UAVs to Locate GPS Interference Stanford GPS Research Laboratory and the Stanford Intelligent Systems Lab Principal Investigator: Sherman Lo, PhD Area
JIFX 16-1 2-6 November 2015 Camp Roberts, CA Jager UAVs to Locate GPS Interference Stanford GPS Research Laboratory and the Stanford Intelligent Systems Lab Principal Investigator: Sherman Lo, PhD Area
Flapping Wing Micro Air Vehicle (FW-MAV) State Estimation and Control with Heading and Altitude Hold
 State Estimation and Control with Heading and Altitude Hold") Flapping Wing Micro Air Vehicle (FW-MAV) State Estimation and Control with Heading and Altitude Hold S. Aurecianus 1, H.V. Phan 2, S. L. Nam 1, T. Kang 1 *, and H.C. Park 2 1 Department of Aerospace Information
Flapping Wing Micro Air Vehicle (FW-MAV) State Estimation and Control with Heading and Altitude Hold S. Aurecianus 1, H.V. Phan 2, S. L. Nam 1, T. Kang 1 *, and H.C. Park 2 1 Department of Aerospace Information
Introduction to Multicopter Design and Control
 Introduction to Multicopter Design and Control Lesson 14 Health Evaluation and Failsafe Quan Quan, Associate Professor qq_buaa@buaa.edu.cn BUAA Reliable Flight Control Group, http://rfly.buaa.edu.cn/ Beihang
Introduction to Multicopter Design and Control Lesson 14 Health Evaluation and Failsafe Quan Quan, Associate Professor qq_buaa@buaa.edu.cn BUAA Reliable Flight Control Group, http://rfly.buaa.edu.cn/ Beihang
Various levels of Simulation for Slybird MAV using Model Based Design
 Various levels of Simulation for Slybird MAV using Model Based Design Kamali C Shikha Jain Vijeesh T Sujeendra MR Sharath R Motivation In order to design robust and reliable flight guidance and control
Various levels of Simulation for Slybird MAV using Model Based Design Kamali C Shikha Jain Vijeesh T Sujeendra MR Sharath R Motivation In order to design robust and reliable flight guidance and control
Field Programmable Gate Array-Based Attitude. Stabilization
 Field Programmable Gate Array-Based Attitude Stabilization Michael J. Stepaniak, Maarten Uijt de Haag, and Frank van Graas Avionics Engineering Center, Ohio University, Athens, OH 45701 A system for determining
Field Programmable Gate Array-Based Attitude Stabilization Michael J. Stepaniak, Maarten Uijt de Haag, and Frank van Graas Avionics Engineering Center, Ohio University, Athens, OH 45701 A system for determining
EXMITTER -- Professional Remote Control Products Expert
 EXMITTER -- Professional Remote Control Products Expert WARNING The following terms are used throughout the product literature to indicate various levels of potential harm when operating this product.
EXMITTER -- Professional Remote Control Products Expert WARNING The following terms are used throughout the product literature to indicate various levels of potential harm when operating this product.
SELF STABILIZING PLATFORM
 SELF STABILIZING PLATFORM Shalaka Turalkar 1, Omkar Padvekar 2, Nikhil Chavan 3, Pritam Sawant 4 and Project Guide: Mr Prathamesh Indulkar 5. 1,2,3,4,5 Department of Electronics and Telecommunication,
SELF STABILIZING PLATFORM Shalaka Turalkar 1, Omkar Padvekar 2, Nikhil Chavan 3, Pritam Sawant 4 and Project Guide: Mr Prathamesh Indulkar 5. 1,2,3,4,5 Department of Electronics and Telecommunication,
Safe Landing of Autonomous Amphibious Unmanned Aerial Vehicle on Water
 Safe Landing of Autonomous Amphibious Unmanned Aerial Vehicle on Water Pandya Garvit Kalpesh 1, Dr. Balasubramanian E. 2, Parvez Alam 3, Sabarish C. 4 1M.Tech Student, Vel Tech Dr. RR & Dr. SR University,
Safe Landing of Autonomous Amphibious Unmanned Aerial Vehicle on Water Pandya Garvit Kalpesh 1, Dr. Balasubramanian E. 2, Parvez Alam 3, Sabarish C. 4 1M.Tech Student, Vel Tech Dr. RR & Dr. SR University,