Inf2D 01: Intelligent Agents and their Environments
|
|
|
- Valerie Snow
- 5 years ago
- Views:
Transcription

1 Inf2D 01: Intelligent Agents and their Environments School of Informatics, University of Edinburgh 16/01/18 Slide Credits: Jacques Fleuriot, Michael Rovatsos, Michael Herrmann
2 Structure of Intelligent Agents An agent: Perceives its environment, Through its sensors, Then achieves its goals By acting on its environment via actuators.

3 Structure of Intelligent Agents
4 Examples of Agents 1 Agent: mail sorting robot Environment: conveyor belt of letters Goals: route letter into correct bin Percepts: array of pixel intensities Actions: route letter into bin Side info:
5 Examples of Agents 2 Agent: intelligent house Environment: occupants enter and leave house, occupants enter and leave rooms; daily variation in outside light and temperature Goals: occupants warm, room lights are on when room is occupied, house energy efficient Percepts: signals from temperature sensor, movement sensor, clock, sound sensor Actions: room heaters on/off, lights on/off Side info:
6 Examples of Agents 3 Agent: autonomous car. Environment: streets, other vehicles, pedestrians, traffic signals/lights/signs. Goals: safe, fast, legal trip. Percepts: camera, GPS signals, speedometer, sonar. Actions: steer, accelerate, brake. Side info:
7 Simple Reflex Agents Action depends only on immediate percepts. Implement by condition-action rules. Example: Agent: Mail sorting robot Environment: Conveyor belt of letters Rule: e.g. city=edinburgh put Scotland bag

8 Simple Reflex Agents
9 Model-Based Reflex Agents Action may depend on history or unperceived aspects of the world. Need to maintain internal world model. Example: Agent: robot vacuum cleaner Environment: dirty room, furniture. Model: map of room, which areas already cleaned. Sensor/model trade-off.
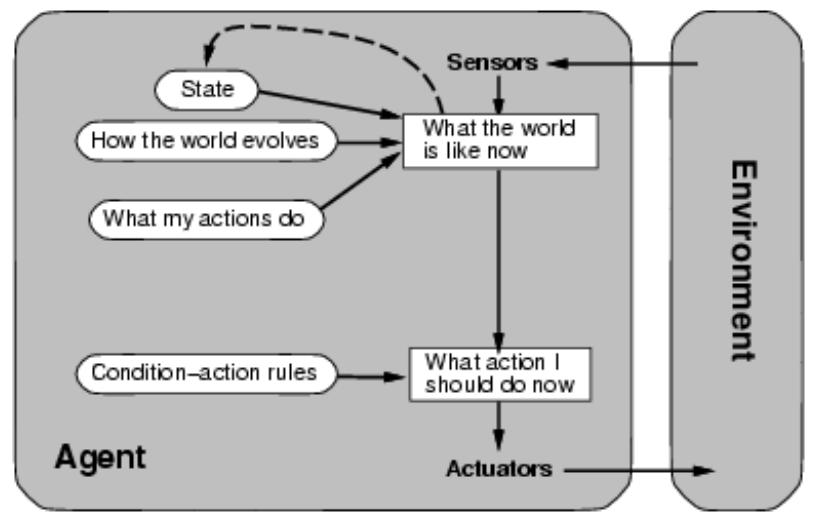
10 Model-Based Agents
11 Goal-Based Agents Agents so far have fixed, implicit goals. We want agents with variable goals. Forming plans to achieve goals is later topic. Example: Agent: household service robot Environment: house & people. Goals: clean clothes, tidy room, table laid, etc.
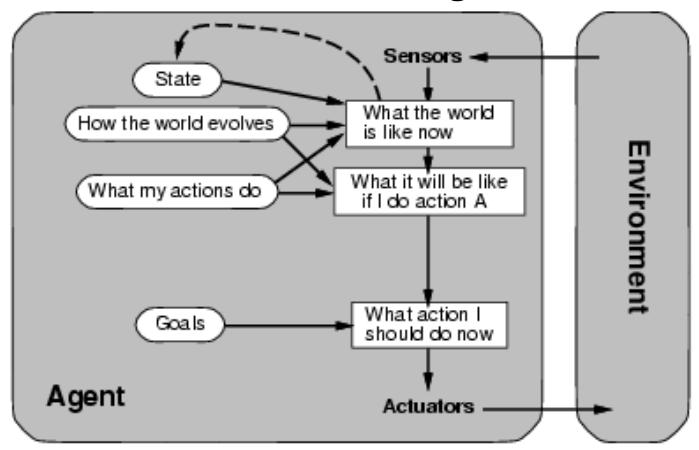
12 Goal-Based Agents
13 Utility-Based Agents Agents so far have had a single goal. Agents may have to juggle conflicting goals. Need to optimise utility over a range of goals. Utility: measure of goodness (a real number). Combine with probability of success to get expected utility. Example: Agent: automatic car. Environment: roads, vehicles, signs, etc. Goals: stay safe, reach destination, be quick, obey law, save fuel, etc.

14 Utility-Based Agents We will not be covering utility-based agents, but this topic is discussed in Russell & Norvig, Chapters 16 and 17.
15 Learning Agents How do agents improve their performance in the light of experience? Generate problems which will test performance. Perform activities according to rules, goals, model, utilities, etc. Monitor performance and identify non-optimal activity. Identify and implement improvements. We will not be covering learning agents, but this topic is dealt with in several honours-level courses (see also R&N, Ch ).
16 Mid-Lecture Problem Consider a chess playing program. What sort of agent would it need to be?
17 Solution(s) Simple-reflex agent: but some actions require some memory (e.g. castling in chess: Model-based reflex agent: but needs to reason about future. Goal-based agent: but only has one goal. Utility-based agent: might consider multiple goals with limited lookahead. Learning agent: Learns from experience or self-play
18 Types of Environment 1 Fully Observable vs. Partially Observable: Full: agent s sensors describe environment state fully. Partial: some parts of environment not visible, noisy sensors. Deterministic vs. Stochastic: Deterministic: next state fully determined by current state and agent s actions. Stochastic: random changes (can t be predicted exactly). An environment may appear stochastic if it is only partially observable.
19 Types of Environment 2 Episodic vs. Sequential: Episodic: next action does not depend on previous actions. Mail-sorting robot vs. crossword puzzle. Static vs. Dynamic: Static: environment unchanged while agent deliberates. Crossword puzzle vs. chess. Industrial robot vs. robot car
20 Types of Environment 3 Discrete vs. Continuous: Discrete: percepts, actions and episodes are discrete. Chess vs. robot car. Single Agent vs. Multi-Agent: How many objects must be modelled as agents. Crossword vs. poker. Element of choice over which objects are considered agents.
21 Types of Environment 4 An agent may have any combination of these properties: from benign (i.e., fully observable, deterministic, episodic, static, discrete and single agent) to chaotic (i.e., partially observable, stochastic, sequential, dynamic, continuous and multi-agent). What are the properties of the environment that would be experienced by a mail-sorting robot? an intelligent house? a car-driving robot?
22 Summary Simple reflex agents Model-based reflex agents Goal-based agents Utility-based agents Learning agents Properties of environments
Structure of Intelligent Agents. Examples of Agents 1. Examples of Agents 2. Intelligent Agents and their Environments. An agent:
 Intelligent Agents and their Environments Michael Rovatsos University of Edinburgh Structure of Intelligent Agents An agent: Perceives its environment, Through its sensors, Then achieves its goals By acting
Intelligent Agents and their Environments Michael Rovatsos University of Edinburgh Structure of Intelligent Agents An agent: Perceives its environment, Through its sensors, Then achieves its goals By acting
Agent. Pengju Ren. Institute of Artificial Intelligence and Robotics
 Agent Pengju Ren Institute of Artificial Intelligence and Robotics pengjuren@xjtu.edu.cn 1 Review: What is AI? Artificial intelligence (AI) is intelligence exhibited by machines. In computer science, the
Agent Pengju Ren Institute of Artificial Intelligence and Robotics pengjuren@xjtu.edu.cn 1 Review: What is AI? Artificial intelligence (AI) is intelligence exhibited by machines. In computer science, the
CS 380: ARTIFICIAL INTELLIGENCE RATIONAL AGENTS. Santiago Ontañón
 CS 380: ARTIFICIAL INTELLIGENCE RATIONAL AGENTS Santiago Ontañón so367@drexel.edu Outline What is an Agent? Rationality Agents and Environments Agent Types (these slides are adapted from Russel & Norvig
CS 380: ARTIFICIAL INTELLIGENCE RATIONAL AGENTS Santiago Ontañón so367@drexel.edu Outline What is an Agent? Rationality Agents and Environments Agent Types (these slides are adapted from Russel & Norvig
Outline. Agents and environments Rationality PEAS (Performance measure, Environment, Actuators, Sensors) Environment types Agent types
 Environment types Agent types") Intelligent Agents Outline Agents and environments Rationality PEAS (Performance measure, Environment, Actuators, Sensors) Environment types Agent types Agents An agent is anything that can be viewed as
Intelligent Agents Outline Agents and environments Rationality PEAS (Performance measure, Environment, Actuators, Sensors) Environment types Agent types Agents An agent is anything that can be viewed as
HIT3002: Introduction to Artificial Intelligence
 HIT3002: Introduction to Artificial Intelligence Intelligent Agents Outline Agents and environments. The vacuum-cleaner world The concept of rational behavior. Environments. Agent structure. Swinburne
HIT3002: Introduction to Artificial Intelligence Intelligent Agents Outline Agents and environments. The vacuum-cleaner world The concept of rational behavior. Environments. Agent structure. Swinburne
CS 380: ARTIFICIAL INTELLIGENCE
 CS 380: ARTIFICIAL INTELLIGENCE RATIONAL AGENTS 9/25/2013 Santiago Ontañón santi@cs.drexel.edu https://www.cs.drexel.edu/~santi/teaching/2013/cs380/intro.html Do you think a machine can be made that replicates
CS 380: ARTIFICIAL INTELLIGENCE RATIONAL AGENTS 9/25/2013 Santiago Ontañón santi@cs.drexel.edu https://www.cs.drexel.edu/~santi/teaching/2013/cs380/intro.html Do you think a machine can be made that replicates
Informatics 2D: Tutorial 1 (Solutions)
") Informatics 2D: Tutorial 1 (Solutions) Agents, Environment, Search Week 2 1 Agents and Environments Consider the following agents: A robot vacuum cleaner which follows a pre-set route around a house and
Informatics 2D: Tutorial 1 (Solutions) Agents, Environment, Search Week 2 1 Agents and Environments Consider the following agents: A robot vacuum cleaner which follows a pre-set route around a house and
Intelligent Agents p.1/25. Intelligent Agents. Chapter 2
 Intelligent Agents p.1/25 Intelligent Agents Chapter 2 Intelligent Agents p.2/25 Outline Agents and environments Rationality PEAS (Performance measure, Environment, Actuators, Sensors) Environment types
Intelligent Agents p.1/25 Intelligent Agents Chapter 2 Intelligent Agents p.2/25 Outline Agents and environments Rationality PEAS (Performance measure, Environment, Actuators, Sensors) Environment types
Plan for the 2nd hour. What is AI. Acting humanly: The Turing test. EDAF70: Applied Artificial Intelligence Agents (Chapter 2 of AIMA)
") Plan for the 2nd hour EDAF70: Applied Artificial Intelligence (Chapter 2 of AIMA) Jacek Malec Dept. of Computer Science, Lund University, Sweden January 17th, 2018 What is an agent? PEAS (Performance measure,
Plan for the 2nd hour EDAF70: Applied Artificial Intelligence (Chapter 2 of AIMA) Jacek Malec Dept. of Computer Science, Lund University, Sweden January 17th, 2018 What is an agent? PEAS (Performance measure,
Intelligent Agents & Search Problem Formulation. AIMA, Chapters 2,
 Intelligent Agents & Search Problem Formulation AIMA, Chapters 2, 3.1-3.2 Outline for today s lecture Intelligent Agents (AIMA 2.1-2) Task Environments Formulating Search Problems CIS 421/521 - Intro to
Intelligent Agents & Search Problem Formulation AIMA, Chapters 2, 3.1-3.2 Outline for today s lecture Intelligent Agents (AIMA 2.1-2) Task Environments Formulating Search Problems CIS 421/521 - Intro to
Administrivia. CS 188: Artificial Intelligence Spring Agents and Environments. Today. Vacuum-Cleaner World. A Reflex Vacuum-Cleaner
 CS 188: Artificial Intelligence Spring 2006 Lecture 2: Agents 1/19/2006 Administrivia Reminder: Drop-in Python/Unix lab Friday 1-4pm, 275 Soda Hall Optional, but recommended Accommodation issues Project
CS 188: Artificial Intelligence Spring 2006 Lecture 2: Agents 1/19/2006 Administrivia Reminder: Drop-in Python/Unix lab Friday 1-4pm, 275 Soda Hall Optional, but recommended Accommodation issues Project
COMP9414/ 9814/ 3411: Artificial Intelligence. Week 2. Classifying AI Tasks
 COMP9414/ 9814/ 3411: Artificial Intelligence Week 2. Classifying AI Tasks Russell & Norvig, Chapter 2. COMP9414/9814/3411 18s1 Tasks & Agent Types 1 Examples of AI Tasks Week 2: Wumpus World, Robocup
COMP9414/ 9814/ 3411: Artificial Intelligence Week 2. Classifying AI Tasks Russell & Norvig, Chapter 2. COMP9414/9814/3411 18s1 Tasks & Agent Types 1 Examples of AI Tasks Week 2: Wumpus World, Robocup
CMSC 372 Artificial Intelligence What is AI? Thinking Like Acting Like Humans Humans Thought Processes Behaviors
 CMSC 372 Artificial Intelligence Fall 2017 What is AI? Machines with minds Decision making and problem solving Machines with actions Robots Thinking Like Humans Acting Like Humans Cognitive modeling/science
CMSC 372 Artificial Intelligence Fall 2017 What is AI? Machines with minds Decision making and problem solving Machines with actions Robots Thinking Like Humans Acting Like Humans Cognitive modeling/science
Outline. Introduction to AI. Artificial Intelligence. What is an AI? What is an AI? Agents Environments
 Outline Introduction to AI ECE457 Applied Artificial Intelligence Fall 2007 Lecture #1 What is an AI? Russell & Norvig, chapter 1 Agents s Russell & Norvig, chapter 2 ECE457 Applied Artificial Intelligence
Outline Introduction to AI ECE457 Applied Artificial Intelligence Fall 2007 Lecture #1 What is an AI? Russell & Norvig, chapter 1 Agents s Russell & Norvig, chapter 2 ECE457 Applied Artificial Intelligence
CPS331 Lecture: Intelligent Agents last revised July 25, 2018
 CPS331 Lecture: Intelligent Agents last revised July 25, 2018 Objectives: 1. To introduce the basic notion of an agent 2. To discuss various types of agents Materials: 1. Projectable of Russell and Norvig
CPS331 Lecture: Intelligent Agents last revised July 25, 2018 Objectives: 1. To introduce the basic notion of an agent 2. To discuss various types of agents Materials: 1. Projectable of Russell and Norvig
Overview Agents, environments, typical components
 Overview Agents, environments, typical components CSC752 Autonomous Robotic Systems Ubbo Visser Department of Computer Science University of Miami January 23, 2017 Outline 1 Autonomous robots 2 Agents
Overview Agents, environments, typical components CSC752 Autonomous Robotic Systems Ubbo Visser Department of Computer Science University of Miami January 23, 2017 Outline 1 Autonomous robots 2 Agents
COMP9414/ 9814/ 3411: Artificial Intelligence. 2. Environment Types. UNSW c Alan Blair,
 COMP9414/ 9814/ 3411: rtificial Intelligence 2. Environment Types COMP9414/9814/3411 16s1 Environments 1 gent Model sensors environment percepts actions? agent actuators COMP9414/9814/3411 16s1 Environments
COMP9414/ 9814/ 3411: rtificial Intelligence 2. Environment Types COMP9414/9814/3411 16s1 Environments 1 gent Model sensors environment percepts actions? agent actuators COMP9414/9814/3411 16s1 Environments
CISC 1600 Lecture 3.4 Agent-based programming
 CISC 1600 Lecture 3.4 Agent-based programming Topics: Agents and environments Rationality Performance, Environment, Actuators, Sensors Four basic types of agents Multi-agent systems NetLogo Agents interact
CISC 1600 Lecture 3.4 Agent-based programming Topics: Agents and environments Rationality Performance, Environment, Actuators, Sensors Four basic types of agents Multi-agent systems NetLogo Agents interact
Introduction to Multiagent Systems
 Introduction to Multiagent Systems Michal Jakob Agent Technology Center, Dept. of Cybernetics, FEE Czech Technical University A4M33MAS Autumn 2010 - Lect. 1 Michal Jakob (Agent Technology Center, Dept.
Introduction to Multiagent Systems Michal Jakob Agent Technology Center, Dept. of Cybernetics, FEE Czech Technical University A4M33MAS Autumn 2010 - Lect. 1 Michal Jakob (Agent Technology Center, Dept.
CS 486/686 Artificial Intelligence
 CS 486/686 Artificial Intelligence Sept 15th, 2009 University of Waterloo cs486/686 Lecture Slides (c) 2009 K. Larson and P. Poupart 1 Course Info Instructor: Pascal Poupart Email: ppoupart@cs.uwaterloo.ca
CS 486/686 Artificial Intelligence Sept 15th, 2009 University of Waterloo cs486/686 Lecture Slides (c) 2009 K. Larson and P. Poupart 1 Course Info Instructor: Pascal Poupart Email: ppoupart@cs.uwaterloo.ca
Course Info. CS 486/686 Artificial Intelligence. Outline. Artificial Intelligence (AI)
") Course Info CS 486/686 Artificial Intelligence May 2nd, 2006 University of Waterloo cs486/686 Lecture Slides (c) 2006 K. Larson and P. Poupart 1 Instructor: Pascal Poupart Email: cs486@students.cs.uwaterloo.ca
Course Info CS 486/686 Artificial Intelligence May 2nd, 2006 University of Waterloo cs486/686 Lecture Slides (c) 2006 K. Larson and P. Poupart 1 Instructor: Pascal Poupart Email: cs486@students.cs.uwaterloo.ca
CPS331 Lecture: Agents and Robots last revised April 27, 2012
 CPS331 Lecture: Agents and Robots last revised April 27, 2012 Objectives: 1. To introduce the basic notion of an agent 2. To discuss various types of agents 3. To introduce the subsumption architecture
CPS331 Lecture: Agents and Robots last revised April 27, 2012 Objectives: 1. To introduce the basic notion of an agent 2. To discuss various types of agents 3. To introduce the subsumption architecture
Artificial Intelligence
 Artificial Intelligence Chapter 1 Chapter 1 1 Outline What is AI? A brief history The state of the art Chapter 1 2 What is AI? Systems that think like humans Systems that think rationally Systems that
Artificial Intelligence Chapter 1 Chapter 1 1 Outline What is AI? A brief history The state of the art Chapter 1 2 What is AI? Systems that think like humans Systems that think rationally Systems that
Last Time: Acting Humanly: The Full Turing Test
 Last Time: Acting Humanly: The Full Turing Test Alan Turing's 1950 article Computing Machinery and Intelligence discussed conditions for considering a machine to be intelligent Can machines think? Can
Last Time: Acting Humanly: The Full Turing Test Alan Turing's 1950 article Computing Machinery and Intelligence discussed conditions for considering a machine to be intelligent Can machines think? Can
Artificial Intelligence: Definition
 Lecture Notes Artificial Intelligence: Definition Dae-Won Kim School of Computer Science & Engineering Chung-Ang University What are AI Systems? Deep Blue defeated the world chess champion Garry Kasparov
Lecture Notes Artificial Intelligence: Definition Dae-Won Kim School of Computer Science & Engineering Chung-Ang University What are AI Systems? Deep Blue defeated the world chess champion Garry Kasparov
CPS331 Lecture: Agents and Robots last revised November 18, 2016
 CPS331 Lecture: Agents and Robots last revised November 18, 2016 Objectives: 1. To introduce the basic notion of an agent 2. To discuss various types of agents 3. To introduce the subsumption architecture
CPS331 Lecture: Agents and Robots last revised November 18, 2016 Objectives: 1. To introduce the basic notion of an agent 2. To discuss various types of agents 3. To introduce the subsumption architecture
Introduction to Artificial Intelligence
 Introduction to Artificial Intelligence Kalev Kask ICS 271 Fall 2017 http://www.ics.uci.edu/~kkask/fall-2017 CS271/ Course requirements Assignments: There will be weekly homework assignments, a project,
Introduction to Artificial Intelligence Kalev Kask ICS 271 Fall 2017 http://www.ics.uci.edu/~kkask/fall-2017 CS271/ Course requirements Assignments: There will be weekly homework assignments, a project,
2. Environment Types. COMP9414/ 9814/ 3411: Artificial Intelligence. Agent Model. Agents as functions. The PEAS model of an Agent
 COM9414/9814/3411 15s1 Environments 1 COM9414/ 9814/ 3411: rtificial Intelligence 2. Environment Types gent Model sensors environment percepts actions? agent actuators COM9414/9814/3411 15s1 Environments
COM9414/9814/3411 15s1 Environments 1 COM9414/ 9814/ 3411: rtificial Intelligence 2. Environment Types gent Model sensors environment percepts actions? agent actuators COM9414/9814/3411 15s1 Environments
CS 730/830: Intro AI. Prof. Wheeler Ruml. TA Bence Cserna. Thinking inside the box. 5 handouts: course info, project info, schedule, slides, asst 1
 CS 730/830: Intro AI Prof. Wheeler Ruml TA Bence Cserna Thinking inside the box. 5 handouts: course info, project info, schedule, slides, asst 1 Wheeler Ruml (UNH) Lecture 1, CS 730 1 / 23 My Definition
CS 730/830: Intro AI Prof. Wheeler Ruml TA Bence Cserna Thinking inside the box. 5 handouts: course info, project info, schedule, slides, asst 1 Wheeler Ruml (UNH) Lecture 1, CS 730 1 / 23 My Definition
Our 2-course meal for this evening
 1 CSEP 573 Applications of Artificial Intelligence (AI) Rajesh Rao (Instructor) Abe Friesen (TA) http://www.cs.washington.edu/csep573 UW CSE AI faculty Our 2-course meal for this evening Part I Goals Logistics
1 CSEP 573 Applications of Artificial Intelligence (AI) Rajesh Rao (Instructor) Abe Friesen (TA) http://www.cs.washington.edu/csep573 UW CSE AI faculty Our 2-course meal for this evening Part I Goals Logistics
Lecture Overview. c D. Poole and A. Mackworth 2017 Artificial Intelligence, Lecture 1.1, Page 1 1 / 15
 Lecture Overview What is Artificial Intelligence? Agents acting in an environment Learning objectives: at the end of the class, you should be able to describe what an intelligent agent is identify the
Lecture Overview What is Artificial Intelligence? Agents acting in an environment Learning objectives: at the end of the class, you should be able to describe what an intelligent agent is identify the
CS343 Artificial Intelligence
 CS343 Artificial Intelligence Prof: Department of Computer Science The University of Texas at Austin Good Morning, Colleagues Good Morning, Colleagues Are there any questions? Logistics Questions about
CS343 Artificial Intelligence Prof: Department of Computer Science The University of Texas at Austin Good Morning, Colleagues Good Morning, Colleagues Are there any questions? Logistics Questions about
Agent-Based Systems. Agent-Based Systems. Agent-Based Systems. Five pervasive trends in computing history. Agent-Based Systems. Agent-Based Systems
 Five pervasive trends in computing history Michael Rovatsos mrovatso@inf.ed.ac.uk Lecture 1 Introduction Ubiquity Cost of processing power decreases dramatically (e.g. Moore s Law), computers used everywhere
Five pervasive trends in computing history Michael Rovatsos mrovatso@inf.ed.ac.uk Lecture 1 Introduction Ubiquity Cost of processing power decreases dramatically (e.g. Moore s Law), computers used everywhere
DIT411/TIN175, Artificial Intelligence. Peter Ljunglöf. 2 February, 2018
 DIT411/TIN175, Artificial Intelligence Chapters 4 5: Non-classical and adversarial search CHAPTERS 4 5: NON-CLASSICAL AND ADVERSARIAL SEARCH DIT411/TIN175, Artificial Intelligence Peter Ljunglöf 2 February,
DIT411/TIN175, Artificial Intelligence Chapters 4 5: Non-classical and adversarial search CHAPTERS 4 5: NON-CLASSICAL AND ADVERSARIAL SEARCH DIT411/TIN175, Artificial Intelligence Peter Ljunglöf 2 February,
Multi-Robot Teamwork Cooperative Multi-Robot Systems
 Multi-Robot Teamwork Cooperative Lecture 1: Basic Concepts Gal A. Kaminka galk@cs.biu.ac.il 2 Why Robotics? Basic Science Study mechanics, energy, physiology, embodiment Cybernetics: the mind (rather than
Multi-Robot Teamwork Cooperative Lecture 1: Basic Concepts Gal A. Kaminka galk@cs.biu.ac.il 2 Why Robotics? Basic Science Study mechanics, energy, physiology, embodiment Cybernetics: the mind (rather than
AN AUTONOMOUS SIMULATION BASED SYSTEM FOR ROBOTIC SERVICES IN PARTIALLY KNOWN ENVIRONMENTS
 AN AUTONOMOUS SIMULATION BASED SYSTEM FOR ROBOTIC SERVICES IN PARTIALLY KNOWN ENVIRONMENTS Eva Cipi, PhD in Computer Engineering University of Vlora, Albania Abstract This paper is focused on presenting
AN AUTONOMOUS SIMULATION BASED SYSTEM FOR ROBOTIC SERVICES IN PARTIALLY KNOWN ENVIRONMENTS Eva Cipi, PhD in Computer Engineering University of Vlora, Albania Abstract This paper is focused on presenting
Solving Problems by Searching
 Solving Problems by Searching Berlin Chen 2005 Reference: 1. S. Russell and P. Norvig. Artificial Intelligence: A Modern Approach. Chapter 3 AI - Berlin Chen 1 Introduction Problem-Solving Agents vs. Reflex
Solving Problems by Searching Berlin Chen 2005 Reference: 1. S. Russell and P. Norvig. Artificial Intelligence: A Modern Approach. Chapter 3 AI - Berlin Chen 1 Introduction Problem-Solving Agents vs. Reflex
CMPT 310 Assignment 1
 CMPT 310 Assignment 1 October 16, 2017 100 points total, worth 10% of the course grade. Turn in on CourSys. Submit a compressed directory (.zip or.tar.gz) with your solutions. Code should be submitted
CMPT 310 Assignment 1 October 16, 2017 100 points total, worth 10% of the course grade. Turn in on CourSys. Submit a compressed directory (.zip or.tar.gz) with your solutions. Code should be submitted
Introduction to Computer Science
 Introduction to Computer Science CSCI 109 Andrew Goodney Fall 2017 China Tianhe-2 Robotics Nov. 20, 2017 Schedule 1 Robotics ì Acting on the physical world 2 What is robotics? uthe study of the intelligent
Introduction to Computer Science CSCI 109 Andrew Goodney Fall 2017 China Tianhe-2 Robotics Nov. 20, 2017 Schedule 1 Robotics ì Acting on the physical world 2 What is robotics? uthe study of the intelligent
Intro to Artificial Intelligence Lecture 1. Ahmed Sallam { }
 Intro to Artificial Intelligence Lecture 1 Ahmed Sallam { http://sallam.cf } Purpose of this course Understand AI Basics Excite you about this field Definitions of AI Thinking Rationally Acting Humanly
Intro to Artificial Intelligence Lecture 1 Ahmed Sallam { http://sallam.cf } Purpose of this course Understand AI Basics Excite you about this field Definitions of AI Thinking Rationally Acting Humanly
Intelligent Driving Agents
 Intelligent Driving Agents The agent approach to tactical driving in autonomous vehicles and traffic simulation Presentation Master s thesis Patrick Ehlert January 29 th, 2001 Imagine. Sensors Actuators
Intelligent Driving Agents The agent approach to tactical driving in autonomous vehicles and traffic simulation Presentation Master s thesis Patrick Ehlert January 29 th, 2001 Imagine. Sensors Actuators
Instructor. Artificial Intelligence (Introduction to) What is AI? Introduction. Dr Sergio Tessaris
 What is AI? Introduction. Dr Sergio Tessaris") Instructor Dr Sergio Tessaris Artificial Intelligence (Introduction to) Researcher, faculty of Computer Science Contact web page: tina.inf.unibz.it/~tessaris email: phone: 0471 016 125 room 229 (2nd floor,
Instructor Dr Sergio Tessaris Artificial Intelligence (Introduction to) Researcher, faculty of Computer Science Contact web page: tina.inf.unibz.it/~tessaris email: phone: 0471 016 125 room 229 (2nd floor,
Introduction to Multi-Agent Systems. Michal Pechoucek & Branislav Bošanský AE4M36MAS Autumn Lect. 1
 Introduction to Multi-Agent Systems Michal Pechoucek & Branislav Bošanský AE4M36MAS Autumn 2016 - Lect. 1 General Information Lecturers: Prof. Michal Pěchouček and Dr. Branislav Bošanský Tutorials: Branislav
Introduction to Multi-Agent Systems Michal Pechoucek & Branislav Bošanský AE4M36MAS Autumn 2016 - Lect. 1 General Information Lecturers: Prof. Michal Pěchouček and Dr. Branislav Bošanský Tutorials: Branislav
Planning in autonomous mobile robotics
 Sistemi Intelligenti Corso di Laurea in Informatica, A.A. 2017-2018 Università degli Studi di Milano Planning in autonomous mobile robotics Nicola Basilico Dipartimento di Informatica Via Comelico 39/41-20135
Sistemi Intelligenti Corso di Laurea in Informatica, A.A. 2017-2018 Università degli Studi di Milano Planning in autonomous mobile robotics Nicola Basilico Dipartimento di Informatica Via Comelico 39/41-20135
Characteristics of Routes in a Road Traffic Assignment
 Characteristics of Routes in a Road Traffic Assignment by David Boyce Northwestern University, Evanston, IL Hillel Bar-Gera Ben-Gurion University of the Negev, Israel at the PTV Vision Users Group Meeting
Characteristics of Routes in a Road Traffic Assignment by David Boyce Northwestern University, Evanston, IL Hillel Bar-Gera Ben-Gurion University of the Negev, Israel at the PTV Vision Users Group Meeting
Robotics and Autonomous Systems
 1 / 41 Robotics and Autonomous Systems Lecture 1: Introduction Simon Parsons Department of Computer Science University of Liverpool 2 / 41 Acknowledgements The robotics slides are heavily based on those
1 / 41 Robotics and Autonomous Systems Lecture 1: Introduction Simon Parsons Department of Computer Science University of Liverpool 2 / 41 Acknowledgements The robotics slides are heavily based on those
Artificial Intelligence (Introduction to)
") Artificial Intelligence (Introduction to) 2003-2004 Instructor Dr Sergio Tessaris Researcher, faculty of Computer Science Contact web page: tina.inf.unibz.it/~tessaris email: phone: 0471 315 652 room 229
Artificial Intelligence (Introduction to) 2003-2004 Instructor Dr Sergio Tessaris Researcher, faculty of Computer Science Contact web page: tina.inf.unibz.it/~tessaris email: phone: 0471 315 652 room 229
Autonomous Agents and MultiAgent Systems* Lecture 2
 * These slides are based on the book byinspitinpired Prof. M. Woodridge An Introduction to Multiagent Systems and the online slides compiled by Professor Jeffrey S. Rosenschein. Modifications introduced
* These slides are based on the book byinspitinpired Prof. M. Woodridge An Introduction to Multiagent Systems and the online slides compiled by Professor Jeffrey S. Rosenschein. Modifications introduced
3.1 Agents. Foundations of Artificial Intelligence. 3.1 Agents. 3.2 Rationality. 3.3 Summary. Introduction: Overview. 3. Introduction: Rational Agents
 Foundations of Artificial Intelligence February 26, 2016 3. Introduction: Rational Agents Foundations of Artificial Intelligence 3. Introduction: Rational Agents 3.1 Agents Malte Helmert Universität Basel
Foundations of Artificial Intelligence February 26, 2016 3. Introduction: Rational Agents Foundations of Artificial Intelligence 3. Introduction: Rational Agents 3.1 Agents Malte Helmert Universität Basel
Section Marks Agents / 8. Search / 10. Games / 13. Logic / 15. Total / 46
 Name: CS 331 Midterm Spring 2017 You have 50 minutes to complete this midterm. You are only allowed to use your textbook, your notes, your assignments and solutions to those assignments during this midterm.
Name: CS 331 Midterm Spring 2017 You have 50 minutes to complete this midterm. You are only allowed to use your textbook, your notes, your assignments and solutions to those assignments during this midterm.
Artificial Intelligence: An overview
 Artificial Intelligence: An overview Thomas Trappenberg January 4, 2009 Based on the slides provided by Russell and Norvig, Chapter 1 & 2 What is AI? Systems that think like humans Systems that act like
Artificial Intelligence: An overview Thomas Trappenberg January 4, 2009 Based on the slides provided by Russell and Norvig, Chapter 1 & 2 What is AI? Systems that think like humans Systems that act like
Elements of Artificial Intelligence and Expert Systems
 Elements of Artificial Intelligence and Expert Systems Master in Data Science for Economics, Business & Finance Nicola Basilico Dipartimento di Informatica Via Comelico 39/41-20135 Milano (MI) Ufficio
Elements of Artificial Intelligence and Expert Systems Master in Data Science for Economics, Business & Finance Nicola Basilico Dipartimento di Informatica Via Comelico 39/41-20135 Milano (MI) Ufficio
What is Artificial Intelligence? Alternate Definitions (Russell + Norvig) Human intelligence
 Human intelligence") CSE 3401: Intro to Artificial Intelligence & Logic Programming Introduction Required Readings: Russell & Norvig Chapters 1 & 2. Lecture slides adapted from those of Fahiem Bacchus. What is AI? What is
CSE 3401: Intro to Artificial Intelligence & Logic Programming Introduction Required Readings: Russell & Norvig Chapters 1 & 2. Lecture slides adapted from those of Fahiem Bacchus. What is AI? What is
Introduction to Vision & Robotics
 Introduction to Vision & Robotics Vittorio Ferrari, 650-2697,IF 1.27 vferrari@staffmail.inf.ed.ac.uk Michael Herrmann, 651-7177, IF1.42 mherrman@inf.ed.ac.uk Lectures: Handouts will be on the web (but
Introduction to Vision & Robotics Vittorio Ferrari, 650-2697,IF 1.27 vferrari@staffmail.inf.ed.ac.uk Michael Herrmann, 651-7177, IF1.42 mherrman@inf.ed.ac.uk Lectures: Handouts will be on the web (but
Outline. Game Playing. Game Problems. Game Problems. Types of games Playing a perfect game. Playing an imperfect game
 Outline Game Playing ECE457 Applied Artificial Intelligence Fall 2007 Lecture #5 Types of games Playing a perfect game Minimax search Alpha-beta pruning Playing an imperfect game Real-time Imperfect information
Outline Game Playing ECE457 Applied Artificial Intelligence Fall 2007 Lecture #5 Types of games Playing a perfect game Minimax search Alpha-beta pruning Playing an imperfect game Real-time Imperfect information
CITS3001. Algorithms, Agents and Artificial Intelligence. Semester 1, 2015
 CITS3001 Algorithms, Agents and Artificial Intelligence Semester 1, 2015 Wei Liu School of Computer Science & Software Eng. The University of Western Australia 5. Agents and introduction to AI AIMA, Chs.
CITS3001 Algorithms, Agents and Artificial Intelligence Semester 1, 2015 Wei Liu School of Computer Science & Software Eng. The University of Western Australia 5. Agents and introduction to AI AIMA, Chs.
Introduction to Vision & Robotics
 Introduction to Vision & Robotics by Bob Fisher rbf@inf.ed.ac.uk Introduction to Robotics Introduction Some definitions Applications of robotics and vision The challenge: a demonstration Historical highlights
Introduction to Vision & Robotics by Bob Fisher rbf@inf.ed.ac.uk Introduction to Robotics Introduction Some definitions Applications of robotics and vision The challenge: a demonstration Historical highlights
DIT411/TIN175, Artificial Intelligence. Peter Ljunglöf. 16 January, 2018
 DIT411/TIN175, Artificial Intelligence Russell & Norvig, Chapters 1 2: Introduction to AI RUSSELL & NORVIG, CHAPTERS 1 2: INTRODUCTION TO AI DIT411/TIN175, Artificial Intelligence Peter Ljunglöf 16 January,
DIT411/TIN175, Artificial Intelligence Russell & Norvig, Chapters 1 2: Introduction to AI RUSSELL & NORVIG, CHAPTERS 1 2: INTRODUCTION TO AI DIT411/TIN175, Artificial Intelligence Peter Ljunglöf 16 January,
Introduction to Vision & Robotics
 Introduction to Vision & Robotics Lecturers: Tim Hospedales 50-4450, IF 1.10 t.hospedales@ed.ac.uk Michael Herrmann 51-7177, IF 1.42 michael.herrmann@ed.ac.uk Lectures (Mon and Thr 9:00 9:50) are available
Introduction to Vision & Robotics Lecturers: Tim Hospedales 50-4450, IF 1.10 t.hospedales@ed.ac.uk Michael Herrmann 51-7177, IF 1.42 michael.herrmann@ed.ac.uk Lectures (Mon and Thr 9:00 9:50) are available
CORC Exploring Robotics. Unit A: Introduction To Robotics
 CORC 3303 Exploring Robotics Unit A: Introduction To Robotics What is a robot? The robot word is attributed to Czech playwright Karel Capek. He first coined the term in his 1921 play Rossum's Universal
CORC 3303 Exploring Robotics Unit A: Introduction To Robotics What is a robot? The robot word is attributed to Czech playwright Karel Capek. He first coined the term in his 1921 play Rossum's Universal
and : Principles of Autonomy and Decision Making. Prof Brian Williams, Prof Emilio Frazzoli and Sertac Karaman September, 8 th, 2010
 16.410 and 16.412: Principles of Autonomy and Decision Making Prof Brian Williams, Prof Emilio Frazzoli and Sertac Karaman September, 8 th, 2010 1 1 Assignments Homework: Class signup, return at end of
16.410 and 16.412: Principles of Autonomy and Decision Making Prof Brian Williams, Prof Emilio Frazzoli and Sertac Karaman September, 8 th, 2010 1 1 Assignments Homework: Class signup, return at end of
CS343 Introduction to Artificial Intelligence Spring 2010
 CS343 Introduction to Artificial Intelligence Spring 2010 Prof: TA: Daniel Urieli Department of Computer Science The University of Texas at Austin Good Afternoon, Colleagues Welcome to a fun, but challenging
CS343 Introduction to Artificial Intelligence Spring 2010 Prof: TA: Daniel Urieli Department of Computer Science The University of Texas at Austin Good Afternoon, Colleagues Welcome to a fun, but challenging
Agents and Introduction to AI
 Agents and Introduction to AI CITS3001 Algorithms, Agents and Artificial Intelligence Tim French School of Computer Science and Software Engineering The University of Western Australia 2017, Semester 2
Agents and Introduction to AI CITS3001 Algorithms, Agents and Artificial Intelligence Tim French School of Computer Science and Software Engineering The University of Western Australia 2017, Semester 2
Automatic Control Systems
 Automatic Control Systems Lecture-1 Basic Concepts of Classical control Emam Fathy Department of Electrical and Control Engineering email: emfmz@yahoo.com 1 What is Control System? A system Controlling
Automatic Control Systems Lecture-1 Basic Concepts of Classical control Emam Fathy Department of Electrical and Control Engineering email: emfmz@yahoo.com 1 What is Control System? A system Controlling
CSIS 4463: Artificial Intelligence. Introduction: Chapter 1
 CSIS 4463: Artificial Intelligence Introduction: Chapter 1 What is AI? Strong AI: Can machines really think? The notion that the human mind is nothing more than a computational device, and thus in principle
CSIS 4463: Artificial Intelligence Introduction: Chapter 1 What is AI? Strong AI: Can machines really think? The notion that the human mind is nothing more than a computational device, and thus in principle
CS343 Introduction to Artificial Intelligence Spring 2012
 CS343 Introduction to Artificial Intelligence Spring 2012 Prof: TA: Daniel Urieli Department of Computer Science The University of Texas at Austin Good Afternoon, Colleagues Welcome to a fun, but challenging
CS343 Introduction to Artificial Intelligence Spring 2012 Prof: TA: Daniel Urieli Department of Computer Science The University of Texas at Austin Good Afternoon, Colleagues Welcome to a fun, but challenging
THE FUTURE OF DATA AND INTELLIGENCE IN TRANSPORT
 THE FUTURE OF DATA AND INTELLIGENCE IN TRANSPORT Humanity s ability to use data and intelligence has increased dramatically People have always used data and intelligence to aid their journeys. In ancient
THE FUTURE OF DATA AND INTELLIGENCE IN TRANSPORT Humanity s ability to use data and intelligence has increased dramatically People have always used data and intelligence to aid their journeys. In ancient
COS Lecture 7 Autonomous Robot Navigation
 COS 495 - Lecture 7 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Control Structure Prior Knowledge Operator Commands Localization
COS 495 - Lecture 7 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Control Structure Prior Knowledge Operator Commands Localization
Affordable Real-Time Vision Guidance for Robot Motion Control
 Affordable Real-Time Vision Guidance for Robot Motion Control Cong Wang Assistant Professor ECE and MIE Departments New Jersey Institute of Technology Mobile: (510)529-6691 Office: (973)596-5744 Advanced
Affordable Real-Time Vision Guidance for Robot Motion Control Cong Wang Assistant Professor ECE and MIE Departments New Jersey Institute of Technology Mobile: (510)529-6691 Office: (973)596-5744 Advanced
LECTURE 26: GAME THEORY 1
 15-382 COLLECTIVE INTELLIGENCE S18 LECTURE 26: GAME THEORY 1 INSTRUCTOR: GIANNI A. DI CARO ICE-CREAM WARS http://youtu.be/jilgxenbk_8 2 GAME THEORY Game theory is the formal study of conflict and cooperation
15-382 COLLECTIVE INTELLIGENCE S18 LECTURE 26: GAME THEORY 1 INSTRUCTOR: GIANNI A. DI CARO ICE-CREAM WARS http://youtu.be/jilgxenbk_8 2 GAME THEORY Game theory is the formal study of conflict and cooperation
Problem solving. Chapter 3, Sections 1 3
 Problem solving Chapter 3, ections 1 3 Artificial Intelligence, spring 2013, Peter junglöf; based on AIMA lides c tuart ussel and Peter Norvig, 2004 Chapter 3, ections 1 3 1 Problem types Deterministic,
Problem solving Chapter 3, ections 1 3 Artificial Intelligence, spring 2013, Peter junglöf; based on AIMA lides c tuart ussel and Peter Norvig, 2004 Chapter 3, ections 1 3 1 Problem types Deterministic,
Driver Education Classroom and In-Car Curriculum Unit 3 Space Management System
 Driver Education Classroom and In-Car Curriculum Unit 3 Space Management System Driver Education Classroom and In-Car Instruction Unit 3-2 Unit Introduction Unit 3 will introduce operator procedural and
Driver Education Classroom and In-Car Curriculum Unit 3 Space Management System Driver Education Classroom and In-Car Instruction Unit 3-2 Unit Introduction Unit 3 will introduce operator procedural and
Google DeepMind s AlphaGo vs. world Go champion Lee Sedol
 Google DeepMind s AlphaGo vs. world Go champion Lee Sedol Review of Nature paper: Mastering the game of Go with Deep Neural Networks & Tree Search Tapani Raiko Thanks to Antti Tarvainen for some slides
Google DeepMind s AlphaGo vs. world Go champion Lee Sedol Review of Nature paper: Mastering the game of Go with Deep Neural Networks & Tree Search Tapani Raiko Thanks to Antti Tarvainen for some slides
Russell and Norvig: an active, artificial agent. continuum of physical configurations and motions
 Chapter 8 Robotics Christian Jacob jacob@cpsc.ucalgary.ca Department of Computer Science University of Calgary 8.5 Robot Institute of America defines a robot as a reprogrammable, multifunction manipulator
Chapter 8 Robotics Christian Jacob jacob@cpsc.ucalgary.ca Department of Computer Science University of Calgary 8.5 Robot Institute of America defines a robot as a reprogrammable, multifunction manipulator
Connected Car Networking
 Connected Car Networking Teng Yang, Francis Wolff and Christos Papachristou Electrical Engineering and Computer Science Case Western Reserve University Cleveland, Ohio Outline Motivation Connected Car
Connected Car Networking Teng Yang, Francis Wolff and Christos Papachristou Electrical Engineering and Computer Science Case Western Reserve University Cleveland, Ohio Outline Motivation Connected Car
Behaviour-Based Control. IAR Lecture 5 Barbara Webb
 Behaviour-Based Control IAR Lecture 5 Barbara Webb Traditional sense-plan-act approach suggests a vertical (serial) task decomposition Sensors Actuators perception modelling planning task execution motor
Behaviour-Based Control IAR Lecture 5 Barbara Webb Traditional sense-plan-act approach suggests a vertical (serial) task decomposition Sensors Actuators perception modelling planning task execution motor
EARIN Jarosław Arabas Room #223, Electronics Bldg.
 EARIN http://elektron.elka.pw.edu.pl/~jarabas/earin.html Jarosław Arabas jarabas@elka.pw.edu.pl Room #223, Electronics Bldg. Paweł Cichosz pcichosz@elka.pw.edu.pl Room #215, Electronics Bldg. EARIN Jarosław
EARIN http://elektron.elka.pw.edu.pl/~jarabas/earin.html Jarosław Arabas jarabas@elka.pw.edu.pl Room #223, Electronics Bldg. Paweł Cichosz pcichosz@elka.pw.edu.pl Room #215, Electronics Bldg. EARIN Jarosław
A Winning Combination
 A Winning Combination Risk factors Statements in this presentation that refer to future plans and expectations are forward-looking statements that involve a number of risks and uncertainties. Words such
A Winning Combination Risk factors Statements in this presentation that refer to future plans and expectations are forward-looking statements that involve a number of risks and uncertainties. Words such
1 Abstract and Motivation
 1 Abstract and Motivation Robust robotic perception, manipulation, and interaction in domestic scenarios continues to present a hard problem: domestic environments tend to be unstructured, are constantly
1 Abstract and Motivation Robust robotic perception, manipulation, and interaction in domestic scenarios continues to present a hard problem: domestic environments tend to be unstructured, are constantly
CS 188 Introduction to Fall 2014 Artificial Intelligence Midterm
 CS 88 Introduction to Fall Artificial Intelligence Midterm INSTRUCTIONS You have 8 minutes. The exam is closed book, closed notes except a one-page crib sheet. Please use non-programmable calculators only.
CS 88 Introduction to Fall Artificial Intelligence Midterm INSTRUCTIONS You have 8 minutes. The exam is closed book, closed notes except a one-page crib sheet. Please use non-programmable calculators only.
Recommended Text. Logistics. Course Logistics. Intelligent Robotic Systems
 Recommended Text Intelligent Robotic Systems CS 685 Jana Kosecka, 4444 Research II kosecka@gmu.edu, 3-1876 [1] S. LaValle: Planning Algorithms, Cambridge Press, http://planning.cs.uiuc.edu/ [2] S. Thrun,
Recommended Text Intelligent Robotic Systems CS 685 Jana Kosecka, 4444 Research II kosecka@gmu.edu, 3-1876 [1] S. LaValle: Planning Algorithms, Cambridge Press, http://planning.cs.uiuc.edu/ [2] S. Thrun,
RoboCup. Presented by Shane Murphy April 24, 2003
 RoboCup Presented by Shane Murphy April 24, 2003 RoboCup: : Today and Tomorrow What we have learned Authors Minoru Asada (Osaka University, Japan), Hiroaki Kitano (Sony CS Labs, Japan), Itsuki Noda (Electrotechnical(
RoboCup Presented by Shane Murphy April 24, 2003 RoboCup: : Today and Tomorrow What we have learned Authors Minoru Asada (Osaka University, Japan), Hiroaki Kitano (Sony CS Labs, Japan), Itsuki Noda (Electrotechnical(
An Introduction to Agent-Based Modeling Unit 5: Components of an Agent-Based Model
 An Introduction to Agent-Based Modeling Unit 5: Components of an Agent-Based Model Bill Rand Assistant Professor of Business Management Poole College of Management North Carolina State University So What
An Introduction to Agent-Based Modeling Unit 5: Components of an Agent-Based Model Bill Rand Assistant Professor of Business Management Poole College of Management North Carolina State University So What
CMU-Q Lecture 20:
 CMU-Q 15-381 Lecture 20: Game Theory I Teacher: Gianni A. Di Caro ICE-CREAM WARS http://youtu.be/jilgxenbk_8 2 GAME THEORY Game theory is the formal study of conflict and cooperation in (rational) multi-agent
CMU-Q 15-381 Lecture 20: Game Theory I Teacher: Gianni A. Di Caro ICE-CREAM WARS http://youtu.be/jilgxenbk_8 2 GAME THEORY Game theory is the formal study of conflict and cooperation in (rational) multi-agent
CS494/594: Software for Intelligent Robotics
 CS494/594: Software for Intelligent Robotics Spring 2007 Tuesday/Thursday 11:10 12:25 Instructor: Dr. Lynne E. Parker TA: Rasko Pjesivac Outline Overview syllabus and class policies Introduction to class:
CS494/594: Software for Intelligent Robotics Spring 2007 Tuesday/Thursday 11:10 12:25 Instructor: Dr. Lynne E. Parker TA: Rasko Pjesivac Outline Overview syllabus and class policies Introduction to class:
CSC384 Intro to Artificial Intelligence* *The following slides are based on Fahiem Bacchus course lecture notes.
 CSC384 Intro to Artificial Intelligence* *The following slides are based on Fahiem Bacchus course lecture notes. Artificial Intelligence A branch of Computer Science. Examines how we can achieve intelligent
CSC384 Intro to Artificial Intelligence* *The following slides are based on Fahiem Bacchus course lecture notes. Artificial Intelligence A branch of Computer Science. Examines how we can achieve intelligent
Big data in Thessaloniki
 Big data in Thessaloniki Josep Maria Salanova Grau Center for Research and Technology Hellas Hellenic Institute of Transport Email: jose@certh.gr - emit@certh.gr Web: www.hit.certh.gr Big data in Thessaloniki
Big data in Thessaloniki Josep Maria Salanova Grau Center for Research and Technology Hellas Hellenic Institute of Transport Email: jose@certh.gr - emit@certh.gr Web: www.hit.certh.gr Big data in Thessaloniki
Reinforcement Learning Simulations and Robotics
 Reinforcement Learning Simulations and Robotics Models Partially observable noise in sensors Policy search methods rather than value functionbased approaches Isolate key parameters by choosing an appropriate
Reinforcement Learning Simulations and Robotics Models Partially observable noise in sensors Policy search methods rather than value functionbased approaches Isolate key parameters by choosing an appropriate
WHAT THE COURSE IS AND ISN T ABOUT. Welcome to CIS 391. Introduction to Artificial Intelligence. Grading & Homework. Welcome to CIS 391
 Welcome to CIS 391 Introduction to Artificial Intelligence Lecturer: Mitch Marcus, mitch@ Levine 503 Office hours will be announced on Piazza Mitch Marcus CIS391 Fall, 2015 TA: Daniel Moroz,
Welcome to CIS 391 Introduction to Artificial Intelligence Lecturer: Mitch Marcus, mitch@ Levine 503 Office hours will be announced on Piazza Mitch Marcus CIS391 Fall, 2015 TA: Daniel Moroz,
Autonomous Vehicle Simulation (MDAS.ai)
") Autonomous Vehicle Simulation (MDAS.ai) Sridhar Lakshmanan Department of Electrical & Computer Engineering University of Michigan - Dearborn Presentation for Physical Systems Replication Panel NDIA Cyber-Enabled
Autonomous Vehicle Simulation (MDAS.ai) Sridhar Lakshmanan Department of Electrical & Computer Engineering University of Michigan - Dearborn Presentation for Physical Systems Replication Panel NDIA Cyber-Enabled
CS325 Artificial Intelligence Robotics I Autonomous Robots (Ch. 25)
") CS325 Artificial Intelligence Robotics I Autonomous Robots (Ch. 25) Dr. Cengiz Günay, Emory Univ. Günay Robotics I Autonomous Robots (Ch. 25) Spring 2013 1 / 15 Robots As Killers? The word robot coined
CS325 Artificial Intelligence Robotics I Autonomous Robots (Ch. 25) Dr. Cengiz Günay, Emory Univ. Günay Robotics I Autonomous Robots (Ch. 25) Spring 2013 1 / 15 Robots As Killers? The word robot coined
Autonomous Mobile Robot Design. Dr. Kostas Alexis (CSE)
") Autonomous Mobile Robot Design Dr. Kostas Alexis (CSE) Course Goals To introduce students into the holistic design of autonomous robots - from the mechatronic design to sensors and intelligence. Develop
Autonomous Mobile Robot Design Dr. Kostas Alexis (CSE) Course Goals To introduce students into the holistic design of autonomous robots - from the mechatronic design to sensors and intelligence. Develop
REINFORCEMENT LEARNING (DD3359) O-03 END-TO-END LEARNING
 O-03 END-TO-END LEARNING") REINFORCEMENT LEARNING (DD3359) O-03 END-TO-END LEARNING RIKA ANTONOVA ANTONOVA@KTH.SE ALI GHADIRZADEH ALGH@KTH.SE RL: What We Know So Far Formulate the problem as an MDP (or POMDP) State space captures
REINFORCEMENT LEARNING (DD3359) O-03 END-TO-END LEARNING RIKA ANTONOVA ANTONOVA@KTH.SE ALI GHADIRZADEH ALGH@KTH.SE RL: What We Know So Far Formulate the problem as an MDP (or POMDP) State space captures
MOBILITY RESEARCH NEEDS FROM THE GOVERNMENT PERSPECTIVE
 MOBILITY RESEARCH NEEDS FROM THE GOVERNMENT PERSPECTIVE First Annual 2018 National Mobility Summit of US DOT University Transportation Centers (UTC) April 12, 2018 Washington, DC Research Areas Cooperative
MOBILITY RESEARCH NEEDS FROM THE GOVERNMENT PERSPECTIVE First Annual 2018 National Mobility Summit of US DOT University Transportation Centers (UTC) April 12, 2018 Washington, DC Research Areas Cooperative
Overview of Challenges in the Development of Autonomous Mobile Robots. August 23, 2011
 Overview of Challenges in the Development of Autonomous Mobile Robots August 23, 2011 What is in a Robot? Sensors Effectors and actuators (i.e., mechanical) Used for locomotion and manipulation Controllers
Overview of Challenges in the Development of Autonomous Mobile Robots August 23, 2011 What is in a Robot? Sensors Effectors and actuators (i.e., mechanical) Used for locomotion and manipulation Controllers
4D-Particle filter localization for a simulated UAV
 4D-Particle filter localization for a simulated UAV Anna Chiara Bellini annachiara.bellini@gmail.com Abstract. Particle filters are a mathematical method that can be used to build a belief about the location
4D-Particle filter localization for a simulated UAV Anna Chiara Bellini annachiara.bellini@gmail.com Abstract. Particle filters are a mathematical method that can be used to build a belief about the location
Advanced Techniques for Mobile Robotics Location-Based Activity Recognition
 Advanced Techniques for Mobile Robotics Location-Based Activity Recognition Wolfram Burgard, Cyrill Stachniss, Kai Arras, Maren Bennewitz Activity Recognition Based on L. Liao, D. J. Patterson, D. Fox,
Advanced Techniques for Mobile Robotics Location-Based Activity Recognition Wolfram Burgard, Cyrill Stachniss, Kai Arras, Maren Bennewitz Activity Recognition Based on L. Liao, D. J. Patterson, D. Fox,
Using FMI/ SSP for Development of Autonomous Driving
 Using FMI/ SSP for Development of Autonomous Driving presented by Jochen Köhler (ZF) FMI User Meeting 15.05.2017 Prague / Czech Republic H.M. Heinkel S.Rude P. R. Mai J. Köhler M. Rühl / A. Pillekeit Motivation
Using FMI/ SSP for Development of Autonomous Driving presented by Jochen Köhler (ZF) FMI User Meeting 15.05.2017 Prague / Czech Republic H.M. Heinkel S.Rude P. R. Mai J. Köhler M. Rühl / A. Pillekeit Motivation
Tech Center a-drive: EUR 7.5 Million for Automated Driving
 No. 005 lg January 18, 2016 Joint Press Release of the Partners Tech Center a-drive: EUR 7.5 Million for Automated Driving Kick-off of Cooperation Project of Science and Industry in the Presence of Minister
No. 005 lg January 18, 2016 Joint Press Release of the Partners Tech Center a-drive: EUR 7.5 Million for Automated Driving Kick-off of Cooperation Project of Science and Industry in the Presence of Minister
Eleonora Escalante, MBA - MEng Strategic Corporate Advisory Services Creating Corporate Integral Value (CIV)
") Eleonora Escalante, MBA - MEng Strategic Corporate Advisory Services Creating Corporate Integral Value (CIV) Leg 7. Trends in Competitive Advantage. Generation Z is the next guinea pig generation for Industry
Eleonora Escalante, MBA - MEng Strategic Corporate Advisory Services Creating Corporate Integral Value (CIV) Leg 7. Trends in Competitive Advantage. Generation Z is the next guinea pig generation for Industry