CISC 1600 Lecture 3.4 Agent-based programming
|
|
|
- Jonah Fields
- 5 years ago
- Views:
Transcription
1 CISC 1600 Lecture 3.4 Agent-based programming Topics: Agents and environments Rationality Performance, Environment, Actuators, Sensors Four basic types of agents Multi-agent systems NetLogo
2 Agents interact with environments An agent is anything that can be viewed as perceiving its environment through sensors and acting upon that environment through actuators What are the sensors and actuators for a Human agent? For a robotic agent? The agent decides what to do at every point in time given its past experience and existing knowledge
3 We are interested in agents for two different purposes Agents for interacting with the world Autonomous hardware or software systems Doing real things on behalf of a person Agents for simulating the world by interacting with each other Idealized models of some sort of behavior Program local behaviors, observe global effects Study emergent properties of systems
4 Agents for interacting with the world: Delegation Computers do things for us, often without our intervention (traffic lights, power grids/plants). Giving control to a computer is called delegation ; are you comfortable with that? (3-mile Island) What kinds of tasks are you comfortable delegating to a computer? tasks that involve safety (flying, driving) spending money (bidding on ebay) Combat operations (robot warriors)
 agents exist and interact They can")
5 Agents for simulating the world: Multi-Agent System (MAS) is... an environment in which many (well, two or more) agents exist and interact They can cooperate, coordinate and negotiate
6 Properties of multi-agent systems Individual agents are self-interested Cooperation is not governed, It is emergent (if it happens at all) Versus distributed systems, where goals are only group-based cooperation is engineered to be inherent in the system Can we conceive of a system as a series of interacting devices rather then as a single system? they have their own goals there may be team rewards for a group of agents achieving a goal together
7 NetLogo is an agent-based simulation environment

8 Simulation: mouse trap nuclear fission

9 Simulation: mouse trap nuclear fission
10 NetLogo Background NetLogo is an IDE (integrated development environment)that can be used to create programs that simulate natural and social phenomena NetLogo is particularly well suited for modeling complex systems that develop over time Using NetLogo you can create programs containing thousands of agents (called turtles ) all operating independently For us, NetLogo will serve as another programming environment in which to explore the Imperative, Procedural and Object-Oriented Paradigms

11 NetLogo Desktop IDE There are 3 tabs: Interface: for creating buttons and plots Code: for writing procedures and defining variables Information: for explanatory text about the project

12 NetLogo Web IDE Pros JavaScript, so portable, mobile-compatible, etc Nothing to install Embed NetLogo simulations in any HTML page Cons Not all features implemented yet Can't edit interfaces
13 NetLogo Agents NetLogo creates programs by specifying behaviors using procedures) for sets of agents and then allowing those agents to interact NetLogo has 4 types of agents: Patches The squares on the world grid Turtles Agents that can move Links Lines between agents The Observer The master controller
14 NetLogo Syntax The syntax for NetLogo is different than what you may be familiar with: Comments are specified using ;; ;; this is a comment Variables and functions can contain some characters that other languages consider special : - and? (but not spaces) clear-all Blocks of related code (such as those that belong to an if statement) are designated using square brackets: ifelse x > 10 [ print x is greater than 10 ] [ print x is not ]
15 NetLogo Sensors and Actuators Agents can use special primitives (built in functions) to see their environment. turtles-here: returns a list of turtles nearby patches-here: returns a list of patches nearby turtles-at: returns a list of turtles at a specific location patches-at: returns a list of patches at a specific location Agents can use other primitives to affect their environment, even other agents (ask) forward, right, left: step forward and turn left and right setxy: change a turtles location set color: change a turtles color set pcolor: change a patches color hatch: create NEW turtles die: delete a turtle
16 Useful NetLogo links Documentation (Everything) Quick Guide (Important aspects of the language / interface) df Dictionary (full list of commands and descriptions of them)
17 Four key notions distinguish agents from objects and arbitrary programs Persistence: Agent state is stored over time Reaction to the environment Agents respond to external events: network traffic, sensor readings Autonomy: Agents decide what to do Across program executions, power failures, etc Based on stimuli, agents choose the best action Goal-orientation What is best is determined by more general goals
18 PEAS defines the job of an agent Performance measure, Environment, Actuators, Sensors The setting for intelligent agent design Consider an automated taxi driver: Performance measure Environment Actuators Sensors
19 PEAS defines the job of an agent Performance measure, Environment, Actuators, Sensors The setting for intelligent agent design Consider an automated taxi driver: Performance measure: Safe, fast, legal, comfortable trip, maximize profits Environment: Roads, other traffic, pedestrians, customers Actuators: Steering wheel, accelerator, brake, signal, horn Sensors: Cameras, sonar, speedometer, GPS, odometer, engine sensors, keyboard
20 PEAS for other tasks Internet shopping agent Backgammon-playing agent Agent driving virtual car in simulation Performance measure Environment Actuators Sensors
21 Rational agents An agent should strive to "do the right thing", based on what it can perceive and the actions it can perform. The right action is the one that will cause the agent to be most successful Performance measure: An objective criterion for success of an agent's behavior Rational Agent: For each possible percept sequence, a rational agent should select an action that is expected to maximize its performance measure
22 Rational agents Rationality is not omniscience Rationality is not clairvoyance Thus rationality does not imply success Just the best chance of success given the past A rational agent should explore, learn, and be autonomous
23 There are four types of agents, i.e., ways of approaching the PEAS (in order of increasing generality) 1)Simple reflex agents 2)Model-based reflex agents 3)Goal-based agents 4)Utility-based agents All of these can be turned into learning agents

24 1) Simple reflex agents
25 2) Model-based reflex agents
26 3) Goal-based agents
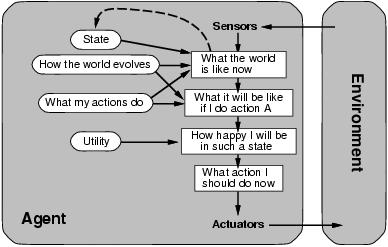
27 4) Utility-based agents

28 Any: Learning agents
29 Key Research Areas 1. Agent design (micro level): how do we design individual agents to operate effectively? 2. Society Design (macro level): how do we design groups of agents, or societies, to operate effectively? 3. Hive Intelligence (abstract level): Can simple agents, working together, effectively demonstrate high level reasoning abilities.
30 Summary Agents interact with environments through actuators and sensors The agent decides what to do at every point in time given its past experience and existing knowledge A perfectly rational agent maximizes expected performance The performance measure evaluates the environment sequence PEAS descriptions define task environments Several basic agent architectures exist: Reflex, reflex with state, goal-based, utility-based
31 References Russell, Stuart J.; Norvig, Peter (2003), Artificial Intelligence: A Modern Approach (2nd ed.), Upper Saddle River, New Jersey: Prentice Hall, ISBN , chpt. 2 Stan Franklin and Art Graesser (1996); Is it an Agent, or just a Program?: A Taxonomy for Autonomous Agents; Proceedings of the Third International Workshop on Agent Theories, Architectures, and Languages, Springer-Verlag, 1996 An Introduction to Multiagent Systems, by Michael Wooldridge, John Wiley & Sons, Ltd (2002).
Plan for the 2nd hour. What is AI. Acting humanly: The Turing test. EDAF70: Applied Artificial Intelligence Agents (Chapter 2 of AIMA)
") Plan for the 2nd hour EDAF70: Applied Artificial Intelligence (Chapter 2 of AIMA) Jacek Malec Dept. of Computer Science, Lund University, Sweden January 17th, 2018 What is an agent? PEAS (Performance measure,
Plan for the 2nd hour EDAF70: Applied Artificial Intelligence (Chapter 2 of AIMA) Jacek Malec Dept. of Computer Science, Lund University, Sweden January 17th, 2018 What is an agent? PEAS (Performance measure,
Outline. Agents and environments Rationality PEAS (Performance measure, Environment, Actuators, Sensors) Environment types Agent types
 Environment types Agent types") Intelligent Agents Outline Agents and environments Rationality PEAS (Performance measure, Environment, Actuators, Sensors) Environment types Agent types Agents An agent is anything that can be viewed as
Intelligent Agents Outline Agents and environments Rationality PEAS (Performance measure, Environment, Actuators, Sensors) Environment types Agent types Agents An agent is anything that can be viewed as
Intelligent Agents p.1/25. Intelligent Agents. Chapter 2
 Intelligent Agents p.1/25 Intelligent Agents Chapter 2 Intelligent Agents p.2/25 Outline Agents and environments Rationality PEAS (Performance measure, Environment, Actuators, Sensors) Environment types
Intelligent Agents p.1/25 Intelligent Agents Chapter 2 Intelligent Agents p.2/25 Outline Agents and environments Rationality PEAS (Performance measure, Environment, Actuators, Sensors) Environment types
CS 380: ARTIFICIAL INTELLIGENCE
 CS 380: ARTIFICIAL INTELLIGENCE RATIONAL AGENTS 9/25/2013 Santiago Ontañón santi@cs.drexel.edu https://www.cs.drexel.edu/~santi/teaching/2013/cs380/intro.html Do you think a machine can be made that replicates
CS 380: ARTIFICIAL INTELLIGENCE RATIONAL AGENTS 9/25/2013 Santiago Ontañón santi@cs.drexel.edu https://www.cs.drexel.edu/~santi/teaching/2013/cs380/intro.html Do you think a machine can be made that replicates
CS 380: ARTIFICIAL INTELLIGENCE RATIONAL AGENTS. Santiago Ontañón
 CS 380: ARTIFICIAL INTELLIGENCE RATIONAL AGENTS Santiago Ontañón so367@drexel.edu Outline What is an Agent? Rationality Agents and Environments Agent Types (these slides are adapted from Russel & Norvig
CS 380: ARTIFICIAL INTELLIGENCE RATIONAL AGENTS Santiago Ontañón so367@drexel.edu Outline What is an Agent? Rationality Agents and Environments Agent Types (these slides are adapted from Russel & Norvig
Agent. Pengju Ren. Institute of Artificial Intelligence and Robotics
 Agent Pengju Ren Institute of Artificial Intelligence and Robotics pengjuren@xjtu.edu.cn 1 Review: What is AI? Artificial intelligence (AI) is intelligence exhibited by machines. In computer science, the
Agent Pengju Ren Institute of Artificial Intelligence and Robotics pengjuren@xjtu.edu.cn 1 Review: What is AI? Artificial intelligence (AI) is intelligence exhibited by machines. In computer science, the
Administrivia. CS 188: Artificial Intelligence Spring Agents and Environments. Today. Vacuum-Cleaner World. A Reflex Vacuum-Cleaner
 CS 188: Artificial Intelligence Spring 2006 Lecture 2: Agents 1/19/2006 Administrivia Reminder: Drop-in Python/Unix lab Friday 1-4pm, 275 Soda Hall Optional, but recommended Accommodation issues Project
CS 188: Artificial Intelligence Spring 2006 Lecture 2: Agents 1/19/2006 Administrivia Reminder: Drop-in Python/Unix lab Friday 1-4pm, 275 Soda Hall Optional, but recommended Accommodation issues Project
HIT3002: Introduction to Artificial Intelligence
 HIT3002: Introduction to Artificial Intelligence Intelligent Agents Outline Agents and environments. The vacuum-cleaner world The concept of rational behavior. Environments. Agent structure. Swinburne
HIT3002: Introduction to Artificial Intelligence Intelligent Agents Outline Agents and environments. The vacuum-cleaner world The concept of rational behavior. Environments. Agent structure. Swinburne
Overview Agents, environments, typical components
 Overview Agents, environments, typical components CSC752 Autonomous Robotic Systems Ubbo Visser Department of Computer Science University of Miami January 23, 2017 Outline 1 Autonomous robots 2 Agents
Overview Agents, environments, typical components CSC752 Autonomous Robotic Systems Ubbo Visser Department of Computer Science University of Miami January 23, 2017 Outline 1 Autonomous robots 2 Agents
Intelligent Agents & Search Problem Formulation. AIMA, Chapters 2,
 Intelligent Agents & Search Problem Formulation AIMA, Chapters 2, 3.1-3.2 Outline for today s lecture Intelligent Agents (AIMA 2.1-2) Task Environments Formulating Search Problems CIS 421/521 - Intro to
Intelligent Agents & Search Problem Formulation AIMA, Chapters 2, 3.1-3.2 Outline for today s lecture Intelligent Agents (AIMA 2.1-2) Task Environments Formulating Search Problems CIS 421/521 - Intro to
Artificial Intelligence
 Artificial Intelligence Chapter 1 Chapter 1 1 Outline What is AI? A brief history The state of the art Chapter 1 2 What is AI? Systems that think like humans Systems that think rationally Systems that
Artificial Intelligence Chapter 1 Chapter 1 1 Outline What is AI? A brief history The state of the art Chapter 1 2 What is AI? Systems that think like humans Systems that think rationally Systems that
Introduction to Multiagent Systems
 Introduction to Multiagent Systems Michal Jakob Agent Technology Center, Dept. of Cybernetics, FEE Czech Technical University A4M33MAS Autumn 2010 - Lect. 1 Michal Jakob (Agent Technology Center, Dept.
Introduction to Multiagent Systems Michal Jakob Agent Technology Center, Dept. of Cybernetics, FEE Czech Technical University A4M33MAS Autumn 2010 - Lect. 1 Michal Jakob (Agent Technology Center, Dept.
Artificial Intelligence: Definition
 Lecture Notes Artificial Intelligence: Definition Dae-Won Kim School of Computer Science & Engineering Chung-Ang University What are AI Systems? Deep Blue defeated the world chess champion Garry Kasparov
Lecture Notes Artificial Intelligence: Definition Dae-Won Kim School of Computer Science & Engineering Chung-Ang University What are AI Systems? Deep Blue defeated the world chess champion Garry Kasparov
Structure of Intelligent Agents. Examples of Agents 1. Examples of Agents 2. Intelligent Agents and their Environments. An agent:
 Intelligent Agents and their Environments Michael Rovatsos University of Edinburgh Structure of Intelligent Agents An agent: Perceives its environment, Through its sensors, Then achieves its goals By acting
Intelligent Agents and their Environments Michael Rovatsos University of Edinburgh Structure of Intelligent Agents An agent: Perceives its environment, Through its sensors, Then achieves its goals By acting
Last Time: Acting Humanly: The Full Turing Test
 Last Time: Acting Humanly: The Full Turing Test Alan Turing's 1950 article Computing Machinery and Intelligence discussed conditions for considering a machine to be intelligent Can machines think? Can
Last Time: Acting Humanly: The Full Turing Test Alan Turing's 1950 article Computing Machinery and Intelligence discussed conditions for considering a machine to be intelligent Can machines think? Can
Inf2D 01: Intelligent Agents and their Environments
 Inf2D 01: Intelligent Agents and their Environments School of Informatics, University of Edinburgh 16/01/18 Slide Credits: Jacques Fleuriot, Michael Rovatsos, Michael Herrmann Structure of Intelligent
Inf2D 01: Intelligent Agents and their Environments School of Informatics, University of Edinburgh 16/01/18 Slide Credits: Jacques Fleuriot, Michael Rovatsos, Michael Herrmann Structure of Intelligent
Introduction to Multi-Agent Systems. Michal Pechoucek & Branislav Bošanský AE4M36MAS Autumn Lect. 1
 Introduction to Multi-Agent Systems Michal Pechoucek & Branislav Bošanský AE4M36MAS Autumn 2016 - Lect. 1 General Information Lecturers: Prof. Michal Pěchouček and Dr. Branislav Bošanský Tutorials: Branislav
Introduction to Multi-Agent Systems Michal Pechoucek & Branislav Bošanský AE4M36MAS Autumn 2016 - Lect. 1 General Information Lecturers: Prof. Michal Pěchouček and Dr. Branislav Bošanský Tutorials: Branislav
CMSC 372 Artificial Intelligence What is AI? Thinking Like Acting Like Humans Humans Thought Processes Behaviors
 CMSC 372 Artificial Intelligence Fall 2017 What is AI? Machines with minds Decision making and problem solving Machines with actions Robots Thinking Like Humans Acting Like Humans Cognitive modeling/science
CMSC 372 Artificial Intelligence Fall 2017 What is AI? Machines with minds Decision making and problem solving Machines with actions Robots Thinking Like Humans Acting Like Humans Cognitive modeling/science
CPS331 Lecture: Agents and Robots last revised April 27, 2012
 CPS331 Lecture: Agents and Robots last revised April 27, 2012 Objectives: 1. To introduce the basic notion of an agent 2. To discuss various types of agents 3. To introduce the subsumption architecture
CPS331 Lecture: Agents and Robots last revised April 27, 2012 Objectives: 1. To introduce the basic notion of an agent 2. To discuss various types of agents 3. To introduce the subsumption architecture
Course Info. CS 486/686 Artificial Intelligence. Outline. Artificial Intelligence (AI)
") Course Info CS 486/686 Artificial Intelligence May 2nd, 2006 University of Waterloo cs486/686 Lecture Slides (c) 2006 K. Larson and P. Poupart 1 Instructor: Pascal Poupart Email: cs486@students.cs.uwaterloo.ca
Course Info CS 486/686 Artificial Intelligence May 2nd, 2006 University of Waterloo cs486/686 Lecture Slides (c) 2006 K. Larson and P. Poupart 1 Instructor: Pascal Poupart Email: cs486@students.cs.uwaterloo.ca
CPS331 Lecture: Intelligent Agents last revised July 25, 2018
 CPS331 Lecture: Intelligent Agents last revised July 25, 2018 Objectives: 1. To introduce the basic notion of an agent 2. To discuss various types of agents Materials: 1. Projectable of Russell and Norvig
CPS331 Lecture: Intelligent Agents last revised July 25, 2018 Objectives: 1. To introduce the basic notion of an agent 2. To discuss various types of agents Materials: 1. Projectable of Russell and Norvig
CS 486/686 Artificial Intelligence
 CS 486/686 Artificial Intelligence Sept 15th, 2009 University of Waterloo cs486/686 Lecture Slides (c) 2009 K. Larson and P. Poupart 1 Course Info Instructor: Pascal Poupart Email: ppoupart@cs.uwaterloo.ca
CS 486/686 Artificial Intelligence Sept 15th, 2009 University of Waterloo cs486/686 Lecture Slides (c) 2009 K. Larson and P. Poupart 1 Course Info Instructor: Pascal Poupart Email: ppoupart@cs.uwaterloo.ca
Agent-Based Systems. Agent-Based Systems. Agent-Based Systems. Five pervasive trends in computing history. Agent-Based Systems. Agent-Based Systems
 Five pervasive trends in computing history Michael Rovatsos mrovatso@inf.ed.ac.uk Lecture 1 Introduction Ubiquity Cost of processing power decreases dramatically (e.g. Moore s Law), computers used everywhere
Five pervasive trends in computing history Michael Rovatsos mrovatso@inf.ed.ac.uk Lecture 1 Introduction Ubiquity Cost of processing power decreases dramatically (e.g. Moore s Law), computers used everywhere
Introduction to Autonomous Agents and Multi-Agent Systems Lecture 1
 Introduction to Autonomous Agents and Multi-Agent Systems Lecture 1 The Unit... Theoretical lectures: Tuesdays (Tagus), Thursdays (Alameda) Evaluation: Theoretic component: 50% (2 tests). Practical component:
Introduction to Autonomous Agents and Multi-Agent Systems Lecture 1 The Unit... Theoretical lectures: Tuesdays (Tagus), Thursdays (Alameda) Evaluation: Theoretic component: 50% (2 tests). Practical component:
COMP9414/ 9814/ 3411: Artificial Intelligence. Week 2. Classifying AI Tasks
 COMP9414/ 9814/ 3411: Artificial Intelligence Week 2. Classifying AI Tasks Russell & Norvig, Chapter 2. COMP9414/9814/3411 18s1 Tasks & Agent Types 1 Examples of AI Tasks Week 2: Wumpus World, Robocup
COMP9414/ 9814/ 3411: Artificial Intelligence Week 2. Classifying AI Tasks Russell & Norvig, Chapter 2. COMP9414/9814/3411 18s1 Tasks & Agent Types 1 Examples of AI Tasks Week 2: Wumpus World, Robocup
Catholijn M. Jonker and Jan Treur Vrije Universiteit Amsterdam, Department of Artificial Intelligence, Amsterdam, The Netherlands
 INTELLIGENT AGENTS Catholijn M. Jonker and Jan Treur Vrije Universiteit Amsterdam, Department of Artificial Intelligence, Amsterdam, The Netherlands Keywords: Intelligent agent, Website, Electronic Commerce
INTELLIGENT AGENTS Catholijn M. Jonker and Jan Treur Vrije Universiteit Amsterdam, Department of Artificial Intelligence, Amsterdam, The Netherlands Keywords: Intelligent agent, Website, Electronic Commerce
CPS331 Lecture: Agents and Robots last revised November 18, 2016
 CPS331 Lecture: Agents and Robots last revised November 18, 2016 Objectives: 1. To introduce the basic notion of an agent 2. To discuss various types of agents 3. To introduce the subsumption architecture
CPS331 Lecture: Agents and Robots last revised November 18, 2016 Objectives: 1. To introduce the basic notion of an agent 2. To discuss various types of agents 3. To introduce the subsumption architecture
Development of an Intelligent Agent based Manufacturing System
 Development of an Intelligent Agent based Manufacturing System Hong-Seok Park 1 and Ngoc-Hien Tran 2 1 School of Mechanical and Automotive Engineering, University of Ulsan, Ulsan 680-749, South Korea 2
Development of an Intelligent Agent based Manufacturing System Hong-Seok Park 1 and Ngoc-Hien Tran 2 1 School of Mechanical and Automotive Engineering, University of Ulsan, Ulsan 680-749, South Korea 2
Introduction: What are the agents?
 Introduction: What are the agents? Roope Raisamo (rr@cs.uta.fi) Department of Computer Sciences University of Tampere http://www.cs.uta.fi/sat/ Definitions of agents The concept of agent has been used
Introduction: What are the agents? Roope Raisamo (rr@cs.uta.fi) Department of Computer Sciences University of Tampere http://www.cs.uta.fi/sat/ Definitions of agents The concept of agent has been used
CPE/CSC 580: Intelligent Agents
 CPE/CSC 580: Intelligent Agents Franz J. Kurfess Computer Science Department California Polytechnic State University San Luis Obispo, CA, U.S.A. 1 Course Overview Introduction Intelligent Agent, Multi-Agent
CPE/CSC 580: Intelligent Agents Franz J. Kurfess Computer Science Department California Polytechnic State University San Luis Obispo, CA, U.S.A. 1 Course Overview Introduction Intelligent Agent, Multi-Agent
3.1 Agents. Foundations of Artificial Intelligence. 3.1 Agents. 3.2 Rationality. 3.3 Summary. Introduction: Overview. 3. Introduction: Rational Agents
 Foundations of Artificial Intelligence February 26, 2016 3. Introduction: Rational Agents Foundations of Artificial Intelligence 3. Introduction: Rational Agents 3.1 Agents Malte Helmert Universität Basel
Foundations of Artificial Intelligence February 26, 2016 3. Introduction: Rational Agents Foundations of Artificial Intelligence 3. Introduction: Rational Agents 3.1 Agents Malte Helmert Universität Basel
Lecture Overview. c D. Poole and A. Mackworth 2017 Artificial Intelligence, Lecture 1.1, Page 1 1 / 15
 Lecture Overview What is Artificial Intelligence? Agents acting in an environment Learning objectives: at the end of the class, you should be able to describe what an intelligent agent is identify the
Lecture Overview What is Artificial Intelligence? Agents acting in an environment Learning objectives: at the end of the class, you should be able to describe what an intelligent agent is identify the
CHAPTER 1: INTRODUCTION. Multiagent Systems mjw/pubs/imas/
 CHAPTER 1: INTRODUCTION Multiagent Systems http://www.csc.liv.ac.uk/ mjw/pubs/imas/ Five Trends in the History of Computing ubiquity; interconnection; intelligence; delegation; and human-orientation. http://www.csc.liv.ac.uk/
CHAPTER 1: INTRODUCTION Multiagent Systems http://www.csc.liv.ac.uk/ mjw/pubs/imas/ Five Trends in the History of Computing ubiquity; interconnection; intelligence; delegation; and human-orientation. http://www.csc.liv.ac.uk/
COMP9414/ 9814/ 3411: Artificial Intelligence. 2. Environment Types. UNSW c Alan Blair,
 COMP9414/ 9814/ 3411: rtificial Intelligence 2. Environment Types COMP9414/9814/3411 16s1 Environments 1 gent Model sensors environment percepts actions? agent actuators COMP9414/9814/3411 16s1 Environments
COMP9414/ 9814/ 3411: rtificial Intelligence 2. Environment Types COMP9414/9814/3411 16s1 Environments 1 gent Model sensors environment percepts actions? agent actuators COMP9414/9814/3411 16s1 Environments
What is Artificial Intelligence? Alternate Definitions (Russell + Norvig) Human intelligence
 Human intelligence") CSE 3401: Intro to Artificial Intelligence & Logic Programming Introduction Required Readings: Russell & Norvig Chapters 1 & 2. Lecture slides adapted from those of Fahiem Bacchus. What is AI? What is
CSE 3401: Intro to Artificial Intelligence & Logic Programming Introduction Required Readings: Russell & Norvig Chapters 1 & 2. Lecture slides adapted from those of Fahiem Bacchus. What is AI? What is
DESIGN AGENTS IN VIRTUAL WORLDS. A User-centred Virtual Architecture Agent. 1. Introduction
 DESIGN GENTS IN VIRTUL WORLDS User-centred Virtual rchitecture gent MRY LOU MHER, NING GU Key Centre of Design Computing and Cognition Department of rchitectural and Design Science University of Sydney,
DESIGN GENTS IN VIRTUL WORLDS User-centred Virtual rchitecture gent MRY LOU MHER, NING GU Key Centre of Design Computing and Cognition Department of rchitectural and Design Science University of Sydney,
AN AUTONOMOUS SIMULATION BASED SYSTEM FOR ROBOTIC SERVICES IN PARTIALLY KNOWN ENVIRONMENTS
 AN AUTONOMOUS SIMULATION BASED SYSTEM FOR ROBOTIC SERVICES IN PARTIALLY KNOWN ENVIRONMENTS Eva Cipi, PhD in Computer Engineering University of Vlora, Albania Abstract This paper is focused on presenting
AN AUTONOMOUS SIMULATION BASED SYSTEM FOR ROBOTIC SERVICES IN PARTIALLY KNOWN ENVIRONMENTS Eva Cipi, PhD in Computer Engineering University of Vlora, Albania Abstract This paper is focused on presenting
An Unreal Based Platform for Developing Intelligent Virtual Agents
 An Unreal Based Platform for Developing Intelligent Virtual Agents N. AVRADINIS, S. VOSINAKIS, T. PANAYIOTOPOULOS, A. BELESIOTIS, I. GIANNAKAS, R. KOUTSIAMANIS, K. TILELIS Knowledge Engineering Lab, Department
An Unreal Based Platform for Developing Intelligent Virtual Agents N. AVRADINIS, S. VOSINAKIS, T. PANAYIOTOPOULOS, A. BELESIOTIS, I. GIANNAKAS, R. KOUTSIAMANIS, K. TILELIS Knowledge Engineering Lab, Department
Multi-Agent Systems in Distributed Communication Environments
 Multi-Agent Systems in Distributed Communication Environments CAMELIA CHIRA, D. DUMITRESCU Department of Computer Science Babes-Bolyai University 1B M. Kogalniceanu Street, Cluj-Napoca, 400084 ROMANIA
Multi-Agent Systems in Distributed Communication Environments CAMELIA CHIRA, D. DUMITRESCU Department of Computer Science Babes-Bolyai University 1B M. Kogalniceanu Street, Cluj-Napoca, 400084 ROMANIA
Using FMI/ SSP for Development of Autonomous Driving
 Using FMI/ SSP for Development of Autonomous Driving presented by Jochen Köhler (ZF) FMI User Meeting 15.05.2017 Prague / Czech Republic H.M. Heinkel S.Rude P. R. Mai J. Köhler M. Rühl / A. Pillekeit Motivation
Using FMI/ SSP for Development of Autonomous Driving presented by Jochen Köhler (ZF) FMI User Meeting 15.05.2017 Prague / Czech Republic H.M. Heinkel S.Rude P. R. Mai J. Köhler M. Rühl / A. Pillekeit Motivation
Our 2-course meal for this evening
 1 CSEP 573 Applications of Artificial Intelligence (AI) Rajesh Rao (Instructor) Abe Friesen (TA) http://www.cs.washington.edu/csep573 UW CSE AI faculty Our 2-course meal for this evening Part I Goals Logistics
1 CSEP 573 Applications of Artificial Intelligence (AI) Rajesh Rao (Instructor) Abe Friesen (TA) http://www.cs.washington.edu/csep573 UW CSE AI faculty Our 2-course meal for this evening Part I Goals Logistics
CS 730/830: Intro AI. Prof. Wheeler Ruml. TA Bence Cserna. Thinking inside the box. 5 handouts: course info, project info, schedule, slides, asst 1
 CS 730/830: Intro AI Prof. Wheeler Ruml TA Bence Cserna Thinking inside the box. 5 handouts: course info, project info, schedule, slides, asst 1 Wheeler Ruml (UNH) Lecture 1, CS 730 1 / 23 My Definition
CS 730/830: Intro AI Prof. Wheeler Ruml TA Bence Cserna Thinking inside the box. 5 handouts: course info, project info, schedule, slides, asst 1 Wheeler Ruml (UNH) Lecture 1, CS 730 1 / 23 My Definition
Silvia Rossi. Introduzione. Lezione n. Corso di Laurea: Informatica. Insegnamento: Sistemi multi-agente. A.A.
 Silvia Rossi Introduzione 1 Lezione n. Corso di Laurea: Informatica Insegnamento: Sistemi multi-agente Email: silrossi@unina.it A.A. 2014-2015 Informazioni: docente/corso Sistemi Multi-Agente Contatto:
Silvia Rossi Introduzione 1 Lezione n. Corso di Laurea: Informatica Insegnamento: Sistemi multi-agente Email: silrossi@unina.it A.A. 2014-2015 Informazioni: docente/corso Sistemi Multi-Agente Contatto:
Agents in the Real World Agents and Knowledge Representation and Reasoning
 Agents in the Real World Agents and Knowledge Representation and Reasoning An Introduction Mitsubishi Concordia, Java-based mobile agent system. http://www.merl.com/projects/concordia Copernic Agents for
Agents in the Real World Agents and Knowledge Representation and Reasoning An Introduction Mitsubishi Concordia, Java-based mobile agent system. http://www.merl.com/projects/concordia Copernic Agents for
Artificial Intelligence and Asymmetric Information Theory. Tshilidzi Marwala and Evan Hurwitz. University of Johannesburg.
 Artificial Intelligence and Asymmetric Information Theory Tshilidzi Marwala and Evan Hurwitz University of Johannesburg Abstract When human agents come together to make decisions it is often the case that
Artificial Intelligence and Asymmetric Information Theory Tshilidzi Marwala and Evan Hurwitz University of Johannesburg Abstract When human agents come together to make decisions it is often the case that
Agent Models of 3D Virtual Worlds
 Agent Models of 3D Virtual Worlds Abstract P_130 Architectural design has relevance to the design of virtual worlds that create a sense of place through the metaphor of buildings, rooms, and inhabitable
Agent Models of 3D Virtual Worlds Abstract P_130 Architectural design has relevance to the design of virtual worlds that create a sense of place through the metaphor of buildings, rooms, and inhabitable
Planning in autonomous mobile robotics
 Sistemi Intelligenti Corso di Laurea in Informatica, A.A. 2017-2018 Università degli Studi di Milano Planning in autonomous mobile robotics Nicola Basilico Dipartimento di Informatica Via Comelico 39/41-20135
Sistemi Intelligenti Corso di Laurea in Informatica, A.A. 2017-2018 Università degli Studi di Milano Planning in autonomous mobile robotics Nicola Basilico Dipartimento di Informatica Via Comelico 39/41-20135
Lab 7: Introduction to Webots and Sensor Modeling
 Lab 7: Introduction to Webots and Sensor Modeling This laboratory requires the following software: Webots simulator C development tools (gcc, make, etc.) The laboratory duration is approximately two hours.
Lab 7: Introduction to Webots and Sensor Modeling This laboratory requires the following software: Webots simulator C development tools (gcc, make, etc.) The laboratory duration is approximately two hours.
Introduction to Artificial Intelligence
 Introduction to Artificial Intelligence Kalev Kask ICS 271 Fall 2017 http://www.ics.uci.edu/~kkask/fall-2017 CS271/ Course requirements Assignments: There will be weekly homework assignments, a project,
Introduction to Artificial Intelligence Kalev Kask ICS 271 Fall 2017 http://www.ics.uci.edu/~kkask/fall-2017 CS271/ Course requirements Assignments: There will be weekly homework assignments, a project,
An Introduction to Agent-Based Modeling Unit 2: Building a Simple Model
 An Introduction to Agent-Based Modeling Unit 2: Building a Simple Model Bill Rand Assistant Professor of Business Management Poole College of Management North Carolina State University NetLogo Go through
An Introduction to Agent-Based Modeling Unit 2: Building a Simple Model Bill Rand Assistant Professor of Business Management Poole College of Management North Carolina State University NetLogo Go through
EARIN Jarosław Arabas Room #223, Electronics Bldg.
 EARIN http://elektron.elka.pw.edu.pl/~jarabas/earin.html Jarosław Arabas jarabas@elka.pw.edu.pl Room #223, Electronics Bldg. Paweł Cichosz pcichosz@elka.pw.edu.pl Room #215, Electronics Bldg. EARIN Jarosław
EARIN http://elektron.elka.pw.edu.pl/~jarabas/earin.html Jarosław Arabas jarabas@elka.pw.edu.pl Room #223, Electronics Bldg. Paweł Cichosz pcichosz@elka.pw.edu.pl Room #215, Electronics Bldg. EARIN Jarosław
STRATEGO EXPERT SYSTEM SHELL
 STRATEGO EXPERT SYSTEM SHELL Casper Treijtel and Leon Rothkrantz Faculty of Information Technology and Systems Delft University of Technology Mekelweg 4 2628 CD Delft University of Technology E-mail: L.J.M.Rothkrantz@cs.tudelft.nl
STRATEGO EXPERT SYSTEM SHELL Casper Treijtel and Leon Rothkrantz Faculty of Information Technology and Systems Delft University of Technology Mekelweg 4 2628 CD Delft University of Technology E-mail: L.J.M.Rothkrantz@cs.tudelft.nl
Virtual Homologation of Software- Intensive Safety Systems: From ESC to Automated Driving
 Virtual Homologation of Software- Intensive Safety Systems: From ESC to Automated Driving Dr. Houssem Abdellatif Global Head Autonomous Driving & ADAS TÜV SÜD Auto Service Christian Gnandt Lead Engineer
Virtual Homologation of Software- Intensive Safety Systems: From ESC to Automated Driving Dr. Houssem Abdellatif Global Head Autonomous Driving & ADAS TÜV SÜD Auto Service Christian Gnandt Lead Engineer
Autonomous Agents and MultiAgent Systems* Lecture 2
 * These slides are based on the book byinspitinpired Prof. M. Woodridge An Introduction to Multiagent Systems and the online slides compiled by Professor Jeffrey S. Rosenschein. Modifications introduced
* These slides are based on the book byinspitinpired Prof. M. Woodridge An Introduction to Multiagent Systems and the online slides compiled by Professor Jeffrey S. Rosenschein. Modifications introduced
Artificial Intelligence: An overview
 Artificial Intelligence: An overview Thomas Trappenberg January 4, 2009 Based on the slides provided by Russell and Norvig, Chapter 1 & 2 What is AI? Systems that think like humans Systems that act like
Artificial Intelligence: An overview Thomas Trappenberg January 4, 2009 Based on the slides provided by Russell and Norvig, Chapter 1 & 2 What is AI? Systems that think like humans Systems that act like
CITS3001. Algorithms, Agents and Artificial Intelligence. Semester 1, 2015
 CITS3001 Algorithms, Agents and Artificial Intelligence Semester 1, 2015 Wei Liu School of Computer Science & Software Eng. The University of Western Australia 5. Agents and introduction to AI AIMA, Chs.
CITS3001 Algorithms, Agents and Artificial Intelligence Semester 1, 2015 Wei Liu School of Computer Science & Software Eng. The University of Western Australia 5. Agents and introduction to AI AIMA, Chs.
Behaviour-Based Control. IAR Lecture 5 Barbara Webb
 Behaviour-Based Control IAR Lecture 5 Barbara Webb Traditional sense-plan-act approach suggests a vertical (serial) task decomposition Sensors Actuators perception modelling planning task execution motor
Behaviour-Based Control IAR Lecture 5 Barbara Webb Traditional sense-plan-act approach suggests a vertical (serial) task decomposition Sensors Actuators perception modelling planning task execution motor
Robotics and Autonomous Systems
 1 / 41 Robotics and Autonomous Systems Lecture 1: Introduction Simon Parsons Department of Computer Science University of Liverpool 2 / 41 Acknowledgements The robotics slides are heavily based on those
1 / 41 Robotics and Autonomous Systems Lecture 1: Introduction Simon Parsons Department of Computer Science University of Liverpool 2 / 41 Acknowledgements The robotics slides are heavily based on those
Multi-Robot Teamwork Cooperative Multi-Robot Systems
 Multi-Robot Teamwork Cooperative Lecture 1: Basic Concepts Gal A. Kaminka galk@cs.biu.ac.il 2 Why Robotics? Basic Science Study mechanics, energy, physiology, embodiment Cybernetics: the mind (rather than
Multi-Robot Teamwork Cooperative Lecture 1: Basic Concepts Gal A. Kaminka galk@cs.biu.ac.il 2 Why Robotics? Basic Science Study mechanics, energy, physiology, embodiment Cybernetics: the mind (rather than
2 Our Hardware Architecture
 RoboCup-99 Team Descriptions Middle Robots League, Team NAIST, pages 170 174 http: /www.ep.liu.se/ea/cis/1999/006/27/ 170 Team Description of the RoboCup-NAIST NAIST Takayuki Nakamura, Kazunori Terada,
RoboCup-99 Team Descriptions Middle Robots League, Team NAIST, pages 170 174 http: /www.ep.liu.se/ea/cis/1999/006/27/ 170 Team Description of the RoboCup-NAIST NAIST Takayuki Nakamura, Kazunori Terada,
2. Environment Types. COMP9414/ 9814/ 3411: Artificial Intelligence. Agent Model. Agents as functions. The PEAS model of an Agent
 COM9414/9814/3411 15s1 Environments 1 COM9414/ 9814/ 3411: rtificial Intelligence 2. Environment Types gent Model sensors environment percepts actions? agent actuators COM9414/9814/3411 15s1 Environments
COM9414/9814/3411 15s1 Environments 1 COM9414/ 9814/ 3411: rtificial Intelligence 2. Environment Types gent Model sensors environment percepts actions? agent actuators COM9414/9814/3411 15s1 Environments
Chapter 6 Experiments
 72 Chapter 6 Experiments The chapter reports on a series of simulations experiments showing how behavior and environment influence each other, from local interactions between individuals and other elements
72 Chapter 6 Experiments The chapter reports on a series of simulations experiments showing how behavior and environment influence each other, from local interactions between individuals and other elements
An Introduction to Agent-Based Modeling Unit 5: Components of an Agent-Based Model
 An Introduction to Agent-Based Modeling Unit 5: Components of an Agent-Based Model Bill Rand Assistant Professor of Business Management Poole College of Management North Carolina State University So What
An Introduction to Agent-Based Modeling Unit 5: Components of an Agent-Based Model Bill Rand Assistant Professor of Business Management Poole College of Management North Carolina State University So What
A Winning Combination
 A Winning Combination Risk factors Statements in this presentation that refer to future plans and expectations are forward-looking statements that involve a number of risks and uncertainties. Words such
A Winning Combination Risk factors Statements in this presentation that refer to future plans and expectations are forward-looking statements that involve a number of risks and uncertainties. Words such
Multi-Agent Planning
 25 PRICAI 2000 Workshop on Teams with Adjustable Autonomy PRICAI 2000 Workshop on Teams with Adjustable Autonomy Position Paper Designing an architecture for adjustably autonomous robot teams David Kortenkamp
25 PRICAI 2000 Workshop on Teams with Adjustable Autonomy PRICAI 2000 Workshop on Teams with Adjustable Autonomy Position Paper Designing an architecture for adjustably autonomous robot teams David Kortenkamp
Artificial Intelligence
 Artificial Intelligence Lecture 01 - Introduction Edirlei Soares de Lima What is Artificial Intelligence? Artificial intelligence is about making computers able to perform the
Artificial Intelligence Lecture 01 - Introduction Edirlei Soares de Lima What is Artificial Intelligence? Artificial intelligence is about making computers able to perform the
UNIVERSITY OF REGINA FACULTY OF ENGINEERING. TIME TABLE: Once every two weeks (tentatively), every other Friday from pm
, every other Friday from pm") 1 UNIVERSITY OF REGINA FACULTY OF ENGINEERING COURSE NO: ENIN 880AL - 030 - Fall 2002 COURSE TITLE: Introduction to Intelligent Robotics CREDIT HOURS: 3 INSTRUCTOR: Dr. Rene V. Mayorga ED 427; Tel: 585-4726,
1 UNIVERSITY OF REGINA FACULTY OF ENGINEERING COURSE NO: ENIN 880AL - 030 - Fall 2002 COURSE TITLE: Introduction to Intelligent Robotics CREDIT HOURS: 3 INSTRUCTOR: Dr. Rene V. Mayorga ED 427; Tel: 585-4726,
Sharing a Charging Station in Collective Robotics
 Sharing a Charging Station in Collective Robotics Angélica Muñoz 1 François Sempé 1,2 Alexis Drogoul 1 1 LIP6 - UPMC. Case 169-4, Place Jussieu. 75252 Paris Cedex 05. France 2 France Télécom R&D. 38/40
Sharing a Charging Station in Collective Robotics Angélica Muñoz 1 François Sempé 1,2 Alexis Drogoul 1 1 LIP6 - UPMC. Case 169-4, Place Jussieu. 75252 Paris Cedex 05. France 2 France Télécom R&D. 38/40
Introduction to Computer Science
 Introduction to Computer Science CSCI 109 Andrew Goodney Fall 2017 China Tianhe-2 Robotics Nov. 20, 2017 Schedule 1 Robotics ì Acting on the physical world 2 What is robotics? uthe study of the intelligent
Introduction to Computer Science CSCI 109 Andrew Goodney Fall 2017 China Tianhe-2 Robotics Nov. 20, 2017 Schedule 1 Robotics ì Acting on the physical world 2 What is robotics? uthe study of the intelligent
A Taxonomy of Multirobot Systems
 A Taxonomy of Multirobot Systems ---- Gregory Dudek, Michael Jenkin, and Evangelos Milios in Robot Teams: From Diversity to Polymorphism edited by Tucher Balch and Lynne E. Parker published by A K Peters,
A Taxonomy of Multirobot Systems ---- Gregory Dudek, Michael Jenkin, and Evangelos Milios in Robot Teams: From Diversity to Polymorphism edited by Tucher Balch and Lynne E. Parker published by A K Peters,
Outline. Introduction to AI. Artificial Intelligence. What is an AI? What is an AI? Agents Environments
 Outline Introduction to AI ECE457 Applied Artificial Intelligence Fall 2007 Lecture #1 What is an AI? Russell & Norvig, chapter 1 Agents s Russell & Norvig, chapter 2 ECE457 Applied Artificial Intelligence
Outline Introduction to AI ECE457 Applied Artificial Intelligence Fall 2007 Lecture #1 What is an AI? Russell & Norvig, chapter 1 Agents s Russell & Norvig, chapter 2 ECE457 Applied Artificial Intelligence
SITUATED DESIGN OF VIRTUAL WORLDS USING RATIONAL AGENTS
 SITUATED DESIGN OF VIRTUAL WORLDS USING RATIONAL AGENTS MARY LOU MAHER AND NING GU Key Centre of Design Computing and Cognition University of Sydney, Australia 2006 Email address: mary@arch.usyd.edu.au
SITUATED DESIGN OF VIRTUAL WORLDS USING RATIONAL AGENTS MARY LOU MAHER AND NING GU Key Centre of Design Computing and Cognition University of Sydney, Australia 2006 Email address: mary@arch.usyd.edu.au
CMSC 372 Artificial Intelligence. Fall Administrivia
 CMSC 372 Artificial Intelligence Fall 2017 Administrivia Instructor: Deepak Kumar Lectures: Mon& Wed 10:10a to 11:30a Labs: Fridays 10:10a to 11:30a Pre requisites: CMSC B206 or H106 and CMSC B231 or permission
CMSC 372 Artificial Intelligence Fall 2017 Administrivia Instructor: Deepak Kumar Lectures: Mon& Wed 10:10a to 11:30a Labs: Fridays 10:10a to 11:30a Pre requisites: CMSC B206 or H106 and CMSC B231 or permission
GNSS in Autonomous Vehicles MM Vision
 GNSS in Autonomous Vehicles MM Vision MM Technology Innovation Automated Driving Technologies (ADT) Evaldo Bruci Context & motivation Within the robotic paradigm Magneti Marelli chose Think & Decision
GNSS in Autonomous Vehicles MM Vision MM Technology Innovation Automated Driving Technologies (ADT) Evaldo Bruci Context & motivation Within the robotic paradigm Magneti Marelli chose Think & Decision
A.I in Automotive? Why and When.
 A.I in Automotive? Why and When. AGENDA 01 02 03 04 Definitions A.I? A.I in automotive Now? Next big A.I breakthrough in Automotive 01 DEFINITIONS DEFINITIONS Artificial Intelligence Artificial Intelligence:
A.I in Automotive? Why and When. AGENDA 01 02 03 04 Definitions A.I? A.I in automotive Now? Next big A.I breakthrough in Automotive 01 DEFINITIONS DEFINITIONS Artificial Intelligence Artificial Intelligence:
Neural Networks for Real-time Pathfinding in Computer Games
 Neural Networks for Real-time Pathfinding in Computer Games Ross Graham 1, Hugh McCabe 1 & Stephen Sheridan 1 1 School of Informatics and Engineering, Institute of Technology at Blanchardstown, Dublin
Neural Networks for Real-time Pathfinding in Computer Games Ross Graham 1, Hugh McCabe 1 & Stephen Sheridan 1 1 School of Informatics and Engineering, Institute of Technology at Blanchardstown, Dublin
Simulation Model of Biometric Authentication Using Multiagent Approach
 Paper Simulation Model of Biometric Authentication Using Multiagent Approach Adrian Kapczyński and Tomasz Owczarek Institute of Economics and Informatics, Silesian University of Technology, Zabrze, Poland
Paper Simulation Model of Biometric Authentication Using Multiagent Approach Adrian Kapczyński and Tomasz Owczarek Institute of Economics and Informatics, Silesian University of Technology, Zabrze, Poland
MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT
 MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT F. TIECHE, C. FACCHINETTI and H. HUGLI Institute of Microtechnology, University of Neuchâtel, Rue de Tivoli 28, CH-2003
MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT F. TIECHE, C. FACCHINETTI and H. HUGLI Institute of Microtechnology, University of Neuchâtel, Rue de Tivoli 28, CH-2003
Artificial Intelligence
 Politecnico di Milano Artificial Intelligence Artificial Intelligence What and When Viola Schiaffonati viola.schiaffonati@polimi.it What is artificial intelligence? When has been AI created? Are there
Politecnico di Milano Artificial Intelligence Artificial Intelligence What and When Viola Schiaffonati viola.schiaffonati@polimi.it What is artificial intelligence? When has been AI created? Are there
Line Detection. Duration Minutes. Di culty Intermediate. Learning Objectives Students will:
 Line Detection Design ways to improve driving safety by helping to prevent drivers from falling asleep and causing an accident. Learning Objectives Students will: Explore the concept of the Loop Understand
Line Detection Design ways to improve driving safety by helping to prevent drivers from falling asleep and causing an accident. Learning Objectives Students will: Explore the concept of the Loop Understand
Cyber-Physical Systems: Challenges for Systems Engineering
 Cyber-Physical Systems: Challenges for Systems Engineering agendacps Closing Event April 12th, 2012, EIT ICT Labs, Berlin Eva Geisberger fortiss An-Institut der Technischen Universität München Cyber-Physical
Cyber-Physical Systems: Challenges for Systems Engineering agendacps Closing Event April 12th, 2012, EIT ICT Labs, Berlin Eva Geisberger fortiss An-Institut der Technischen Universität München Cyber-Physical
IN5480 vildehos Høst 2018
 1. Three definitions of Ai The study of how to produce machines that have some of the qualities that the human mind has, such as the ability to understand language, recognize pictures, solve problems,
1. Three definitions of Ai The study of how to produce machines that have some of the qualities that the human mind has, such as the ability to understand language, recognize pictures, solve problems,
Spring 19 Planning Techniques for Robotics Introduction; What is Planning for Robotics?
 16-350 Spring 19 Planning Techniques for Robotics Introduction; What is Planning for Robotics? Maxim Likhachev Robotics Institute Carnegie Mellon University About Me My Research Interests: - Planning,
16-350 Spring 19 Planning Techniques for Robotics Introduction; What is Planning for Robotics? Maxim Likhachev Robotics Institute Carnegie Mellon University About Me My Research Interests: - Planning,
Funzionalità per la navigazione di robot mobili. Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo
 Funzionalità per la navigazione di robot mobili Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Variability of the Robotic Domain UNIBG - Corso di Robotica - Prof. Brugali Tourist
Funzionalità per la navigazione di robot mobili Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Variability of the Robotic Domain UNIBG - Corso di Robotica - Prof. Brugali Tourist
Multi-Agent Control Structure for a Vision Based Robot Soccer System
 Multi- Control Structure for a Vision Based Robot Soccer System Yangmin Li, Wai Ip Lei, and Xiaoshan Li Department of Electromechanical Engineering Faculty of Science and Technology University of Macau
Multi- Control Structure for a Vision Based Robot Soccer System Yangmin Li, Wai Ip Lei, and Xiaoshan Li Department of Electromechanical Engineering Faculty of Science and Technology University of Macau
Elements of Artificial Intelligence and Expert Systems
 Elements of Artificial Intelligence and Expert Systems Master in Data Science for Economics, Business & Finance Nicola Basilico Dipartimento di Informatica Via Comelico 39/41-20135 Milano (MI) Ufficio
Elements of Artificial Intelligence and Expert Systems Master in Data Science for Economics, Business & Finance Nicola Basilico Dipartimento di Informatica Via Comelico 39/41-20135 Milano (MI) Ufficio
Key-Words: - Neural Networks, Cerebellum, Cerebellar Model Articulation Controller (CMAC), Auto-pilot
, Auto-pilot") erebellum Based ar Auto-Pilot System B. HSIEH,.QUEK and A.WAHAB Intelligent Systems Laboratory, School of omputer Engineering Nanyang Technological University, Blk N4 #2A-32 Nanyang Avenue, Singapore 639798
erebellum Based ar Auto-Pilot System B. HSIEH,.QUEK and A.WAHAB Intelligent Systems Laboratory, School of omputer Engineering Nanyang Technological University, Blk N4 #2A-32 Nanyang Avenue, Singapore 639798
Autonomous driving made safe
 tm Autonomous driving made safe Founder, Bio Celite Milbrandt Austin, Texas since 1998 Founder of Slacker Radio In dash for Tesla, GM, and Ford. 35M active users 2008 Chief Product Officer of RideScout
tm Autonomous driving made safe Founder, Bio Celite Milbrandt Austin, Texas since 1998 Founder of Slacker Radio In dash for Tesla, GM, and Ford. 35M active users 2008 Chief Product Officer of RideScout
How to build an autonomous anything
 How to build an autonomous anything Loren Shure Application Engineering MathWorks 2015 The MathWorks, Inc. 1 2 3 4 5 6 7 Autonomous Technology 8 Autonomous Technology Having the power for self-governance
How to build an autonomous anything Loren Shure Application Engineering MathWorks 2015 The MathWorks, Inc. 1 2 3 4 5 6 7 Autonomous Technology 8 Autonomous Technology Having the power for self-governance
Indiana K-12 Computer Science Standards
 Indiana K-12 Computer Science Standards What is Computer Science? Computer science is the study of computers and algorithmic processes, including their principles, their hardware and software designs,
Indiana K-12 Computer Science Standards What is Computer Science? Computer science is the study of computers and algorithmic processes, including their principles, their hardware and software designs,
Introduction to Systems Engineering
 p. 1/2 ENES 489P Hands-On Systems Engineering Projects Introduction to Systems Engineering Mark Austin E-mail: austin@isr.umd.edu Institute for Systems Research, University of Maryland, College Park Career
p. 1/2 ENES 489P Hands-On Systems Engineering Projects Introduction to Systems Engineering Mark Austin E-mail: austin@isr.umd.edu Institute for Systems Research, University of Maryland, College Park Career
What is AI? AI is the reproduction of human reasoning and intelligent behavior by computational methods. an attempt of. Intelligent behavior Computer
 What is AI? an attempt of AI is the reproduction of human reasoning and intelligent behavior by computational methods Intelligent behavior Computer Humans 1 What is AI? (R&N) Discipline that systematizes
What is AI? an attempt of AI is the reproduction of human reasoning and intelligent behavior by computational methods Intelligent behavior Computer Humans 1 What is AI? (R&N) Discipline that systematizes
AGENTS AND AGREEMENT TECHNOLOGIES: THE NEXT GENERATION OF DISTRIBUTED SYSTEMS
 AGENTS AND AGREEMENT TECHNOLOGIES: THE NEXT GENERATION OF DISTRIBUTED SYSTEMS Vicent J. Botti Navarro Grupo de Tecnología Informática- Inteligencia Artificial Departamento de Sistemas Informáticos y Computación
AGENTS AND AGREEMENT TECHNOLOGIES: THE NEXT GENERATION OF DISTRIBUTED SYSTEMS Vicent J. Botti Navarro Grupo de Tecnología Informática- Inteligencia Artificial Departamento de Sistemas Informáticos y Computación
Russell and Norvig: an active, artificial agent. continuum of physical configurations and motions
 Chapter 8 Robotics Christian Jacob jacob@cpsc.ucalgary.ca Department of Computer Science University of Calgary 8.5 Robot Institute of America defines a robot as a reprogrammable, multifunction manipulator
Chapter 8 Robotics Christian Jacob jacob@cpsc.ucalgary.ca Department of Computer Science University of Calgary 8.5 Robot Institute of America defines a robot as a reprogrammable, multifunction manipulator
CS494/594: Software for Intelligent Robotics
 CS494/594: Software for Intelligent Robotics Spring 2007 Tuesday/Thursday 11:10 12:25 Instructor: Dr. Lynne E. Parker TA: Rasko Pjesivac Outline Overview syllabus and class policies Introduction to class:
CS494/594: Software for Intelligent Robotics Spring 2007 Tuesday/Thursday 11:10 12:25 Instructor: Dr. Lynne E. Parker TA: Rasko Pjesivac Outline Overview syllabus and class policies Introduction to class:
By now you should already have downloaded and installed Metatrader 4. If not, go to the previous episodes of this course.
 What would you think is necessary to print data like your Account Balance or your Account Equity, your Trading profit or your Brokers spread directly on the chart on your computer screen? When I started
What would you think is necessary to print data like your Account Balance or your Account Equity, your Trading profit or your Brokers spread directly on the chart on your computer screen? When I started
CS8678_L1. Course Introduction. CS 8678 Introduction to Robotics & AI Dr. Ken Hoganson. Start Momentarily
 Class Will CS8678_L1 Course Introduction CS 8678 Introduction to Robotics & AI Dr. Ken Hoganson Start Momentarily Contents Overview of syllabus (insert from web site) Description Textbook Mindstorms NXT
Class Will CS8678_L1 Course Introduction CS 8678 Introduction to Robotics & AI Dr. Ken Hoganson Start Momentarily Contents Overview of syllabus (insert from web site) Description Textbook Mindstorms NXT
SOFTWARE AGENTS IN HANDLING ABNORMAL SITUATIONS IN INDUSTRIAL PLANTS
 SOFTWARE AGENTS IN HANDLING ABNORMAL SITUATIONS IN INDUSTRIAL PLANTS Sami Syrjälä and Seppo Kuikka Institute of Automation and Control Department of Automation Tampere University of Technology Korkeakoulunkatu
SOFTWARE AGENTS IN HANDLING ABNORMAL SITUATIONS IN INDUSTRIAL PLANTS Sami Syrjälä and Seppo Kuikka Institute of Automation and Control Department of Automation Tampere University of Technology Korkeakoulunkatu
Prof. Sameer Singh CS 175: PROJECTS IN AI (IN MINECRAFT) WINTER April 6, 2017
 WINTER April 6, 2017") Prof. Sameer Singh CS 175: PROJECTS IN AI (IN MINECRAFT) WINTER 2017 April 6, 2017 Upcoming Misc. Check out course webpage and schedule Check out Canvas, especially for deadlines Do the survey by tomorrow,
Prof. Sameer Singh CS 175: PROJECTS IN AI (IN MINECRAFT) WINTER 2017 April 6, 2017 Upcoming Misc. Check out course webpage and schedule Check out Canvas, especially for deadlines Do the survey by tomorrow,
Our Final Invention: Artificial Intelligence and the End of the Human Era
 Our Final Invention: Artificial Intelligence and the End of the Human Era Daniel Franklin, Sophia Feng, Joseph Burces, Diana Luu, Ted Bohrer, and Janet Dai PHIL 110 Artificial Intelligence (AI) The theory
Our Final Invention: Artificial Intelligence and the End of the Human Era Daniel Franklin, Sophia Feng, Joseph Burces, Diana Luu, Ted Bohrer, and Janet Dai PHIL 110 Artificial Intelligence (AI) The theory