GNSS in Autonomous Vehicles MM Vision
|
|
|
- Poppy Blair
- 5 years ago
- Views:
Transcription

")
1 GNSS in Autonomous Vehicles MM Vision MM Technology Innovation Automated Driving Technologies (ADT) Evaldo Bruci


2 Context & motivation Within the robotic paradigm Magneti Marelli chose Think & Decision as the key item for study, development, prototyping, product planning Our framework platform is called: Cognitive Fusion Framework (CFF) 2


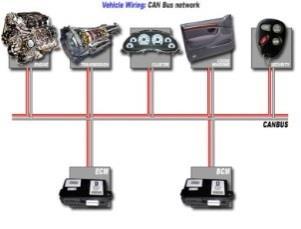
3 Automated Driving: Architecture Distributed Mixed Centralized Smart Smart Smart VDe 1.0 Smart VDe 2.0 Smart Actuation Actuation 3


 Data Fusion")



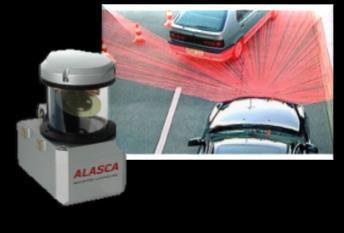
4 From perception to movement Cognitive Fusion Framework Perimeter Actuation Layer Vehicle Control Decision Layer Planning & Decision (Action & Path) Data Fusion Layer Data Fusion Fusion Layer Perception Layer Fusion Lidar Camera Radar Ultrasounds Environmental Awareness Behavioral Prediction Maps & Positioning GPS IMU Visual Odometry Maps [Ref. JDL Model] 4







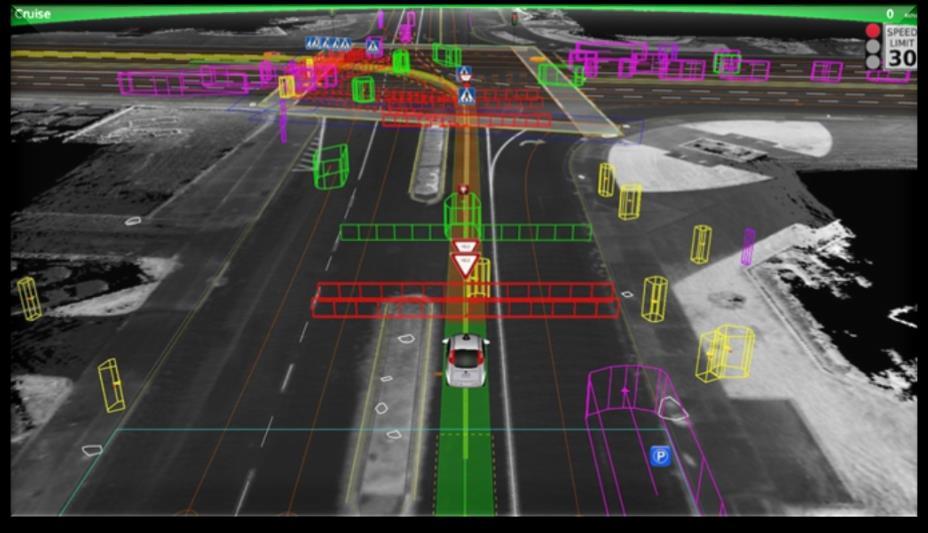
5 Fusion to create an environmental model & Data Fusion Environment Awareness Behavioral prediction Source: 5






6 Decide if and how to move Action Planning Keywords Risk Assessment Deep Neural Networks Safety Fuel Efficiency Comfort Path Planning Keywords Trajectory estimate 6





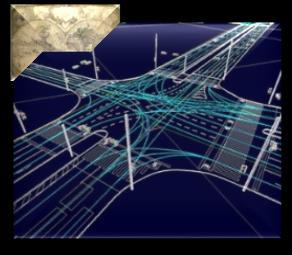
7 Localize with high precision Precise GNSS Map Manager & Precise Positioning Precise Inertial sensors HD Maps Lane detection/visual map matching 7




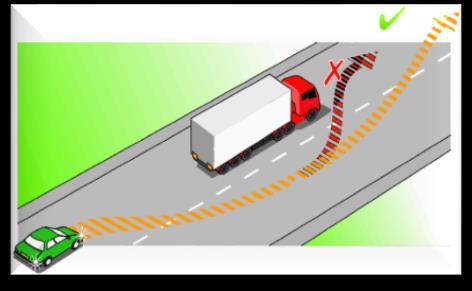
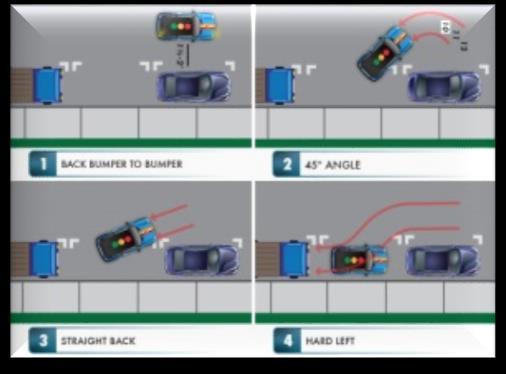
8 Magneti Marelli PoC demonstrated in 2016 Highway use case Automatic Valet Parking use case 8



9 Magneti Marelli PoC under development Urban use case Long distance Highway use case 9



10 Precise Positioning - Precise map: Function It must works in fusion with the whole system. But in failure mode it must be able to work alone. Positioning+map must: Guarantee navigation among the parking spaces in automatic valet parking Guarantee lane keeping in motorway, highway and city boulevards 10
11 Precise Positioning Precise map: Target accuracy Target accuracy: Positioning accuracy : 20 cm Cartography accuracy: 20 cm max error on node coordinates Strategy for achievemnt: Positioning accuracy : Accurate sensors Well designed sensor fusion GNSS Ultra tight integration GNSS PPP RTK Visual Map Matching Cartography: Work on requirements with suppliers 11
12 GNSS Phase detection Strategy Pro s Con s PPP Function suitable for automotive Subscription price not yet at automotive level Receiver price not yet at automotive level RTK Require additional communication channel Low-zero price available, but not world wide spread Receiver price not yet at automotive level 12

13 GNSS Cost consideration COST IS THE BLOCKING FACTOR Reasonable autonomous car price Keuro The cost of a GNSS with phase detection capability is still between 1 and 10 KEuro Automotive cost is the key issue for GNSS success in autonomous driving Receivers Services 13
14 GNSS Cost consideration The strategy is cooperation with suppliers: GNSS engine suppliers PPP RTK corrections providers Points to be exploited : Accurate definition of the products specification s Advantage of automotive level mass production 14

15 Precise Positioning Ultra tight integration Highly promising in terms of GNSS reliabilty/integrity Accuracy increase is espected No added cost in the final product 15


16 Precise Positioning Visual map matching An autonomous vehicle must have Cameras/Laser scanners No added cost in the final product 16
17 Thank you
Perception platform and fusion modules results. Angelos Amditis - ICCS and Lali Ghosh - DEL interactive final event
 Perception platform and fusion modules results Angelos Amditis - ICCS and Lali Ghosh - DEL interactive final event 20 th -21 st November 2013 Agenda Introduction Environment Perception in Intelligent Transport
Perception platform and fusion modules results Angelos Amditis - ICCS and Lali Ghosh - DEL interactive final event 20 th -21 st November 2013 Agenda Introduction Environment Perception in Intelligent Transport
An Information Fusion Method for Vehicle Positioning System
 An Information Fusion Method for Vehicle Positioning System Yi Yan, Che-Cheng Chang and Wun-Sheng Yao Abstract Vehicle positioning techniques have a broad application in advanced driver assistant system
An Information Fusion Method for Vehicle Positioning System Yi Yan, Che-Cheng Chang and Wun-Sheng Yao Abstract Vehicle positioning techniques have a broad application in advanced driver assistant system
TECHNOLOGY DEVELOPMENT AREAS IN AAWA
 TECHNOLOGY DEVELOPMENT AREAS IN AAWA Technologies for realizing remote and autonomous ships exist. The task is to find the optimum way to combine them reliably and cost effecticely. Ship state definition
TECHNOLOGY DEVELOPMENT AREAS IN AAWA Technologies for realizing remote and autonomous ships exist. The task is to find the optimum way to combine them reliably and cost effecticely. Ship state definition
VSI Labs The Build Up of Automated Driving
 VSI Labs The Build Up of Automated Driving October - 2017 Agenda Opening Remarks Introduction and Background Customers Solutions VSI Labs Some Industry Content Opening Remarks Automated vehicle systems
VSI Labs The Build Up of Automated Driving October - 2017 Agenda Opening Remarks Introduction and Background Customers Solutions VSI Labs Some Industry Content Opening Remarks Automated vehicle systems
A Winning Combination
 A Winning Combination Risk factors Statements in this presentation that refer to future plans and expectations are forward-looking statements that involve a number of risks and uncertainties. Words such
A Winning Combination Risk factors Statements in this presentation that refer to future plans and expectations are forward-looking statements that involve a number of risks and uncertainties. Words such
Using FMI/ SSP for Development of Autonomous Driving
 Using FMI/ SSP for Development of Autonomous Driving presented by Jochen Köhler (ZF) FMI User Meeting 15.05.2017 Prague / Czech Republic H.M. Heinkel S.Rude P. R. Mai J. Köhler M. Rühl / A. Pillekeit Motivation
Using FMI/ SSP for Development of Autonomous Driving presented by Jochen Köhler (ZF) FMI User Meeting 15.05.2017 Prague / Czech Republic H.M. Heinkel S.Rude P. R. Mai J. Köhler M. Rühl / A. Pillekeit Motivation
HIGHTS: towards sub-meter positioning accuracy in vehicular networks. Jérôme Härri (EURECOM) on Behalf of HIGHTS ETSI ITS Workshop March 6-8, 2018
 on Behalf of HIGHTS ETSI ITS Workshop March 6-8, 2018") HIGHTS: towards sub-meter positioning accuracy in vehicular networks Jérôme Härri (EURECOM) on Behalf of HIGHTS ETSI ITS Workshop March 6-8, 2018 The HIGHTS Consortium 09.03.2018 H2020 HIGHTS Project 2
HIGHTS: towards sub-meter positioning accuracy in vehicular networks Jérôme Härri (EURECOM) on Behalf of HIGHTS ETSI ITS Workshop March 6-8, 2018 The HIGHTS Consortium 09.03.2018 H2020 HIGHTS Project 2
SIS63-Building the Future-Advanced Integrated Safety Applications: interactive Perception platform and fusion modules results
 SIS63-Building the Future-Advanced Integrated Safety Applications: interactive Perception platform and fusion modules results Angelos Amditis (ICCS) and Lali Ghosh (DEL) 18 th October 2013 20 th ITS World
SIS63-Building the Future-Advanced Integrated Safety Applications: interactive Perception platform and fusion modules results Angelos Amditis (ICCS) and Lali Ghosh (DEL) 18 th October 2013 20 th ITS World
High Precision GNSS in Automotive
 High Precision GNSS in Automotive Jonathan Auld, VP Engineering and Safety 6, March, 2018 2 Global OEM Positioning Solutions and Services for Land, Sea, and Air. GNSS in Automotive Today Today the primary
High Precision GNSS in Automotive Jonathan Auld, VP Engineering and Safety 6, March, 2018 2 Global OEM Positioning Solutions and Services for Land, Sea, and Air. GNSS in Automotive Today Today the primary
23270: AUGMENTED REALITY FOR NAVIGATION AND INFORMATIONAL ADAS. Sergii Bykov Technical Lead Machine Learning 12 Oct 2017
 23270: AUGMENTED REALITY FOR NAVIGATION AND INFORMATIONAL ADAS Sergii Bykov Technical Lead Machine Learning 12 Oct 2017 Product Vision Company Introduction Apostera GmbH with headquarter in Munich, was
23270: AUGMENTED REALITY FOR NAVIGATION AND INFORMATIONAL ADAS Sergii Bykov Technical Lead Machine Learning 12 Oct 2017 Product Vision Company Introduction Apostera GmbH with headquarter in Munich, was
Webinar. 9 things you should know about centimeter-level GNSS accuracy
 Webinar 9 things you should know about centimeter-level GNSS accuracy Webinar agenda 9 things you should know about centimeter-level GNSS accuracy 1. High precision GNSS challenges 2. u-blox F9 technology
Webinar 9 things you should know about centimeter-level GNSS accuracy Webinar agenda 9 things you should know about centimeter-level GNSS accuracy 1. High precision GNSS challenges 2. u-blox F9 technology
Devid Will, Adrian Zlocki
 Devid Will, Adrian Zlocki fka Forschungsgesellschaft Kraftfahrwesen mbh TS91 Sensors for Automated Vehicles State of the Art Analysis for Connected and Automated Driving within the SCOUT Project Overview
Devid Will, Adrian Zlocki fka Forschungsgesellschaft Kraftfahrwesen mbh TS91 Sensors for Automated Vehicles State of the Art Analysis for Connected and Automated Driving within the SCOUT Project Overview
ADVANCED GNSS ALGORITHMS FOR SAFE AUTONOMOUS VEHICLES
 ION GNSS+ 2017 ADVANCED GNSS ALGORITHMS FOR SAFE AUTONOMOUS VEHICLES SEPTEMBER 29 TH, 2017 ION GNSS+ 2017, PORTLAND, OREGON, USA SESSION A5: Autonomous and Assisted Vehicle Applications Property of GMV
ION GNSS+ 2017 ADVANCED GNSS ALGORITHMS FOR SAFE AUTONOMOUS VEHICLES SEPTEMBER 29 TH, 2017 ION GNSS+ 2017, PORTLAND, OREGON, USA SESSION A5: Autonomous and Assisted Vehicle Applications Property of GMV
Intelligent Technology for More Advanced Autonomous Driving
 FEATURED ARTICLES Autonomous Driving Technology for Connected Cars Intelligent Technology for More Advanced Autonomous Driving Autonomous driving is recognized as an important technology for dealing with
FEATURED ARTICLES Autonomous Driving Technology for Connected Cars Intelligent Technology for More Advanced Autonomous Driving Autonomous driving is recognized as an important technology for dealing with
interactive IP: Perception platform and modules
 interactive IP: Perception platform and modules Angelos Amditis, ICCS 19 th ITS-WC-SIS76: Advanced integrated safety applications based on enhanced perception, active interventions and new advanced sensors
interactive IP: Perception platform and modules Angelos Amditis, ICCS 19 th ITS-WC-SIS76: Advanced integrated safety applications based on enhanced perception, active interventions and new advanced sensors
Sensor Fusion for Navigation in Degraded Environements
 Sensor Fusion for Navigation in Degraded Environements David M. Bevly Professor Director of the GPS and Vehicle Dynamics Lab dmbevly@eng.auburn.edu (334) 844-3446 GPS and Vehicle Dynamics Lab Auburn University
Sensor Fusion for Navigation in Degraded Environements David M. Bevly Professor Director of the GPS and Vehicle Dynamics Lab dmbevly@eng.auburn.edu (334) 844-3446 GPS and Vehicle Dynamics Lab Auburn University
Autonomous driving made safe
 tm Autonomous driving made safe Founder, Bio Celite Milbrandt Austin, Texas since 1998 Founder of Slacker Radio In dash for Tesla, GM, and Ford. 35M active users 2008 Chief Product Officer of RideScout
tm Autonomous driving made safe Founder, Bio Celite Milbrandt Austin, Texas since 1998 Founder of Slacker Radio In dash for Tesla, GM, and Ford. 35M active users 2008 Chief Product Officer of RideScout
Tsuyoshi Sato PIONEER CORPORATION July 6, 2017
 Technology R&D for for Highly Highly Automated Automated Driving Driving Tsuyoshi Sato PIONEER CORPORATION July 6, 2017 Agenda Introduction Overview Architecture R&D for Highly Automated Driving Hardware
Technology R&D for for Highly Highly Automated Automated Driving Driving Tsuyoshi Sato PIONEER CORPORATION July 6, 2017 Agenda Introduction Overview Architecture R&D for Highly Automated Driving Hardware
Choosing the Optimum Mix of Sensors for Driver Assistance and Autonomous Vehicles
 Choosing the Optimum Mix of Sensors for Driver Assistance and Autonomous Vehicles Ali Osman Ors May 2, 2017 Copyright 2017 NXP Semiconductors 1 Sensing Technology Comparison Rating: H = High, M=Medium,
Choosing the Optimum Mix of Sensors for Driver Assistance and Autonomous Vehicles Ali Osman Ors May 2, 2017 Copyright 2017 NXP Semiconductors 1 Sensing Technology Comparison Rating: H = High, M=Medium,
Physics Based Sensor simulation
 Physics Based Sensor simulation Jordan Gorrochotegui - Product Manager Software and Services Mike Phillips Software Engineer Restricted Siemens AG 2017 Realize innovation. Siemens offers solutions across
Physics Based Sensor simulation Jordan Gorrochotegui - Product Manager Software and Services Mike Phillips Software Engineer Restricted Siemens AG 2017 Realize innovation. Siemens offers solutions across
CAPACITIES FOR TECHNOLOGY TRANSFER
 CAPACITIES FOR TECHNOLOGY TRANSFER The Institut de Robòtica i Informàtica Industrial (IRI) is a Joint University Research Institute of the Spanish Council for Scientific Research (CSIC) and the Technical
CAPACITIES FOR TECHNOLOGY TRANSFER The Institut de Robòtica i Informàtica Industrial (IRI) is a Joint University Research Institute of the Spanish Council for Scientific Research (CSIC) and the Technical
Cooperative localization (part I) Jouni Rantakokko
 Jouni Rantakokko") Cooperative localization (part I) Jouni Rantakokko Cooperative applications / approaches Wireless sensor networks Robotics Pedestrian localization First responders Localization sensors - Small, low-cost
Cooperative localization (part I) Jouni Rantakokko Cooperative applications / approaches Wireless sensor networks Robotics Pedestrian localization First responders Localization sensors - Small, low-cost
Invited talk IET-Renault Workshop Autonomous Vehicles: From theory to full scale applications Novotel Paris Les Halles, June 18 th 2015
 Risk assessment & Decision-making for safe Vehicle Navigation under Uncertainty Christian LAUGIER, First class Research Director at Inria http://emotion.inrialpes.fr/laugier Contributions from Mathias
Risk assessment & Decision-making for safe Vehicle Navigation under Uncertainty Christian LAUGIER, First class Research Director at Inria http://emotion.inrialpes.fr/laugier Contributions from Mathias
Author s Name Name of the Paper Session. DYNAMIC POSITIONING CONFERENCE October 10-11, 2017 SENSORS SESSION. Sensing Autonomy.
 Author s Name Name of the Paper Session DYNAMIC POSITIONING CONFERENCE October 10-11, 2017 SENSORS SESSION Sensing Autonomy By Arne Rinnan Kongsberg Seatex AS Abstract A certain level of autonomy is already
Author s Name Name of the Paper Session DYNAMIC POSITIONING CONFERENCE October 10-11, 2017 SENSORS SESSION Sensing Autonomy By Arne Rinnan Kongsberg Seatex AS Abstract A certain level of autonomy is already
PROPART PROJECT PRESENTATION
 1 PROPART PROJECT PRESENTATION Stefan Nord RISE Measurement Science and Technology RISE/Safety and Transport Presentation Outline Project Data Consortium Objectives Partner contributions 3 Project data
1 PROPART PROJECT PRESENTATION Stefan Nord RISE Measurement Science and Technology RISE/Safety and Transport Presentation Outline Project Data Consortium Objectives Partner contributions 3 Project data
Walking and Flying Robots for Challenging Environments
 Shaping the future Walking and Flying Robots for Challenging Environments Roland Siegwart, ETH Zurich www.asl.ethz.ch www.wysszurich.ch Lisbon, Portugal, July 29, 2016 Roland Siegwart 29.07.2016 1 Content
Shaping the future Walking and Flying Robots for Challenging Environments Roland Siegwart, ETH Zurich www.asl.ethz.ch www.wysszurich.ch Lisbon, Portugal, July 29, 2016 Roland Siegwart 29.07.2016 1 Content
Detection and Tracking of the Vanishing Point on a Horizon for Automotive Applications
 Detection and Tracking of the Vanishing Point on a Horizon for Automotive Applications Young-Woo Seo and Ragunathan (Raj) Rajkumar GM-CMU Autonomous Driving Collaborative Research Lab Carnegie Mellon University
Detection and Tracking of the Vanishing Point on a Horizon for Automotive Applications Young-Woo Seo and Ragunathan (Raj) Rajkumar GM-CMU Autonomous Driving Collaborative Research Lab Carnegie Mellon University
NAV CAR Lane-sensitive positioning and navigation for innovative ITS services AMAA, May 31 st, 2012 E. Schoitsch, E. Althammer, R.
 NAV CAR Lane-sensitive positioning and navigation for innovative ITS services AMAA, May 31 st, 2012 E. Schoitsch, E. Althammer, R. Kloibhofer (AIT), R. Spielhofer, M. Reinthaler, P. Nitsche (ÖFPZ), H.
NAV CAR Lane-sensitive positioning and navigation for innovative ITS services AMAA, May 31 st, 2012 E. Schoitsch, E. Althammer, R. Kloibhofer (AIT), R. Spielhofer, M. Reinthaler, P. Nitsche (ÖFPZ), H.
TAPAS - Testbed in Aarhus for Precision positioning and Autonomous Systems
 TAPAS - Testbed in Aarhus for Precision positioning and Autonomous Systems 1. TAPAS - Vision and perspectives 2. TAPAS Alpha General description 3. TAPAS Beta Future initiatives. Per Lundahl Thomsen, TAPAS
TAPAS - Testbed in Aarhus for Precision positioning and Autonomous Systems 1. TAPAS - Vision and perspectives 2. TAPAS Alpha General description 3. TAPAS Beta Future initiatives. Per Lundahl Thomsen, TAPAS
Motion & Navigation Solution
 Navsight Land & Air Solution Motion & Navigation Solution FOR SURVEYING APPLICATIONS Motion, Navigation, and Geo-referencing NAVSIGHT LAND/AIR SOLUTION is a full high performance inertial navigation solution
Navsight Land & Air Solution Motion & Navigation Solution FOR SURVEYING APPLICATIONS Motion, Navigation, and Geo-referencing NAVSIGHT LAND/AIR SOLUTION is a full high performance inertial navigation solution
Autonomous Vehicle Simulation (MDAS.ai)
") Autonomous Vehicle Simulation (MDAS.ai) Sridhar Lakshmanan Department of Electrical & Computer Engineering University of Michigan - Dearborn Presentation for Physical Systems Replication Panel NDIA Cyber-Enabled
Autonomous Vehicle Simulation (MDAS.ai) Sridhar Lakshmanan Department of Electrical & Computer Engineering University of Michigan - Dearborn Presentation for Physical Systems Replication Panel NDIA Cyber-Enabled
Positioning, location data and GNSS as solution for Autonomous driving
 Positioning, location data and GNSS as solution for Autonomous driving Jarkko Koskinen, Heidi Kuusniemi, Juha Hyyppä, Sarang Thombre and Martti Kirkko-Jaakkola FGI, NLS Definition of the Arctic 66 34 N
Positioning, location data and GNSS as solution for Autonomous driving Jarkko Koskinen, Heidi Kuusniemi, Juha Hyyppä, Sarang Thombre and Martti Kirkko-Jaakkola FGI, NLS Definition of the Arctic 66 34 N
Semi-Autonomous Parking for Enhanced Safety and Efficiency
 Technical Report 105 Semi-Autonomous Parking for Enhanced Safety and Efficiency Sriram Vishwanath WNCG June 2017 Data-Supported Transportation Operations & Planning Center (D-STOP) A Tier 1 USDOT University
Technical Report 105 Semi-Autonomous Parking for Enhanced Safety and Efficiency Sriram Vishwanath WNCG June 2017 Data-Supported Transportation Operations & Planning Center (D-STOP) A Tier 1 USDOT University
Technical Notes LAND MAPPING APPLICATIONS. Leading the way with increased reliability.
 LAND MAPPING APPLICATIONS Technical Notes Leading the way with increased reliability. Industry-leading post-processing software designed to maximize the accuracy potential of your POS LV (Position and
LAND MAPPING APPLICATIONS Technical Notes Leading the way with increased reliability. Industry-leading post-processing software designed to maximize the accuracy potential of your POS LV (Position and
Ground Robotics Capability Conference and Exhibit. Mr. George Solhan Office of Naval Research Code March 2010
 Ground Robotics Capability Conference and Exhibit Mr. George Solhan Office of Naval Research Code 30 18 March 2010 1 S&T Focused on Naval Needs Broad FY10 DON S&T Funding = $1,824M Discovery & Invention
Ground Robotics Capability Conference and Exhibit Mr. George Solhan Office of Naval Research Code 30 18 March 2010 1 S&T Focused on Naval Needs Broad FY10 DON S&T Funding = $1,824M Discovery & Invention
Autonomous Mobile Robot Design. Dr. Kostas Alexis (CSE)
") Autonomous Mobile Robot Design Dr. Kostas Alexis (CSE) Course Goals To introduce students into the holistic design of autonomous robots - from the mechatronic design to sensors and intelligence. Develop
Autonomous Mobile Robot Design Dr. Kostas Alexis (CSE) Course Goals To introduce students into the holistic design of autonomous robots - from the mechatronic design to sensors and intelligence. Develop
Team Kanaloa: research initiatives and the Vertically Integrated Project (VIP) development paradigm
 development paradigm") Additive Manufacturing Renewable Energy and Energy Storage Astronomical Instruments and Precision Engineering Team Kanaloa: research initiatives and the Vertically Integrated Project (VIP) development
Additive Manufacturing Renewable Energy and Energy Storage Astronomical Instruments and Precision Engineering Team Kanaloa: research initiatives and the Vertically Integrated Project (VIP) development
Robots Leaving the Production Halls Opportunities and Challenges
 Shaping the future Robots Leaving the Production Halls Opportunities and Challenges Prof. Dr. Roland Siegwart www.asl.ethz.ch www.wysszurich.ch APAC INNOVATION SUMMIT 17 Hong Kong Science Park Science,
Shaping the future Robots Leaving the Production Halls Opportunities and Challenges Prof. Dr. Roland Siegwart www.asl.ethz.ch www.wysszurich.ch APAC INNOVATION SUMMIT 17 Hong Kong Science Park Science,
ARCHITECTURE AND MODEL OF DATA INTEGRATION BETWEEN MANAGEMENT SYSTEMS AND AGRICULTURAL MACHINES FOR PRECISION AGRICULTURE
 ARCHITECTURE AND MODEL OF DATA INTEGRATION BETWEEN MANAGEMENT SYSTEMS AND AGRICULTURAL MACHINES FOR PRECISION AGRICULTURE W. C. Lopes, R. R. D. Pereira, M. L. Tronco, A. J. V. Porto NepAS [Center for Teaching
ARCHITECTURE AND MODEL OF DATA INTEGRATION BETWEEN MANAGEMENT SYSTEMS AND AGRICULTURAL MACHINES FOR PRECISION AGRICULTURE W. C. Lopes, R. R. D. Pereira, M. L. Tronco, A. J. V. Porto NepAS [Center for Teaching
Current Technologies in Vehicular Communications
 Current Technologies in Vehicular Communications George Dimitrakopoulos George Bravos Current Technologies in Vehicular Communications George Dimitrakopoulos Department of Informatics and Telematics Harokopio
Current Technologies in Vehicular Communications George Dimitrakopoulos George Bravos Current Technologies in Vehicular Communications George Dimitrakopoulos Department of Informatics and Telematics Harokopio
Update on enhanced satellite navigation services empowering innovative solutions in Smart Mobility
 Update on enhanced satellite navigation services empowering innovative solutions in Smart Mobility 8th June 2018- Technical session 1 Latest developments in innovative ITS activities Alberto Fernández
Update on enhanced satellite navigation services empowering innovative solutions in Smart Mobility 8th June 2018- Technical session 1 Latest developments in innovative ITS activities Alberto Fernández
Final Report Non Hit Car And Truck
 Final Report Non Hit Car And Truck 2010-2013 Project within Vehicle and Traffic Safety Author: Anders Almevad Date 2014-03-17 Content 1. Executive summary... 3 2. Background... 3. Objective... 4. Project
Final Report Non Hit Car And Truck 2010-2013 Project within Vehicle and Traffic Safety Author: Anders Almevad Date 2014-03-17 Content 1. Executive summary... 3 2. Background... 3. Objective... 4. Project
David Howarth. Business Development Manager Americas
 David Howarth Business Development Manager Americas David Howarth IPG Automotive USA, Inc. Business Development Manager Americas david.howarth@ipg-automotive.com ni.com Testing Automated Driving Functions
David Howarth Business Development Manager Americas David Howarth IPG Automotive USA, Inc. Business Development Manager Americas david.howarth@ipg-automotive.com ni.com Testing Automated Driving Functions
Inertial Navigation System
 Apogee Series ULTIMATE ACCURACY MEMS Inertial Navigation System INS MRU AHRS ITAR Free 0.005 RMS Motion Sensing & Georeferencing APOGEE SERIES makes high accuracy affordable for all surveying companies.
Apogee Series ULTIMATE ACCURACY MEMS Inertial Navigation System INS MRU AHRS ITAR Free 0.005 RMS Motion Sensing & Georeferencing APOGEE SERIES makes high accuracy affordable for all surveying companies.
DENSO
 DENSO www.densocorp-na.com Collaborative Automated Driving Description of Project DENSO is one of the biggest tier one suppliers in the automotive industry, and one of its main goals is to provide solutions
DENSO www.densocorp-na.com Collaborative Automated Driving Description of Project DENSO is one of the biggest tier one suppliers in the automotive industry, and one of its main goals is to provide solutions
Advanced Technologies & Intelligent Autonomous Systems in Alberta. Ken Brizel CEO ACAMP
 Advanced Technologies & Intelligent Autonomous Systems in Alberta Ken Brizel CEO ACAMP Who and What is ACAMP ACAMP is a unique industry led product development centre supporting advanced technology commercialization
Advanced Technologies & Intelligent Autonomous Systems in Alberta Ken Brizel CEO ACAMP Who and What is ACAMP ACAMP is a unique industry led product development centre supporting advanced technology commercialization
THE NEXT WAVE OF COMPUTING. September 2017
 THE NEXT WAVE OF COMPUTING September 2017 SAFE HARBOR Forward-Looking Statements Except for the historical information contained herein, certain matters in this presentation including, but not limited
THE NEXT WAVE OF COMPUTING September 2017 SAFE HARBOR Forward-Looking Statements Except for the historical information contained herein, certain matters in this presentation including, but not limited
Using Vision-Based Driver Assistance to Augment Vehicular Ad-Hoc Network Communication
 Using Vision-Based Driver Assistance to Augment Vehicular Ad-Hoc Network Communication Kyle Charbonneau, Michael Bauer and Steven Beauchemin Department of Computer Science University of Western Ontario
Using Vision-Based Driver Assistance to Augment Vehicular Ad-Hoc Network Communication Kyle Charbonneau, Michael Bauer and Steven Beauchemin Department of Computer Science University of Western Ontario
Evaluation of Connected Vehicle Technology for Concept Proposal Using V2X Testbed
 AUTOMOTIVE Evaluation of Connected Vehicle Technology for Concept Proposal Using V2X Testbed Yoshiaki HAYASHI*, Izumi MEMEZAWA, Takuji KANTOU, Shingo OHASHI, and Koichi TAKAYAMA ----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------
AUTOMOTIVE Evaluation of Connected Vehicle Technology for Concept Proposal Using V2X Testbed Yoshiaki HAYASHI*, Izumi MEMEZAWA, Takuji KANTOU, Shingo OHASHI, and Koichi TAKAYAMA ----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------
Cooperative navigation (part II)
") Cooperative navigation (part II) An example using foot-mounted INS and UWB-transceivers Jouni Rantakokko Aim Increased accuracy during long-term operations in GNSS-challenged environments for - First responders
Cooperative navigation (part II) An example using foot-mounted INS and UWB-transceivers Jouni Rantakokko Aim Increased accuracy during long-term operations in GNSS-challenged environments for - First responders
DENSO www. densocorp-na.com
 DENSO www. densocorp-na.com Machine Learning for Automated Driving Description of Project DENSO is one of the biggest tier one suppliers in the automotive industry, and one of its main goals is to provide
DENSO www. densocorp-na.com Machine Learning for Automated Driving Description of Project DENSO is one of the biggest tier one suppliers in the automotive industry, and one of its main goals is to provide
Robust Positioning for Urban Traffic
 Robust Positioning for Urban Traffic Motivations and Activity plan for the WG 4.1.4 Dr. Laura Ruotsalainen Research Manager, Department of Navigation and positioning Finnish Geospatial Research Institute
Robust Positioning for Urban Traffic Motivations and Activity plan for the WG 4.1.4 Dr. Laura Ruotsalainen Research Manager, Department of Navigation and positioning Finnish Geospatial Research Institute
Fusion in EU projects and the Perception Approach. Dr. Angelos Amditis interactive Summer School 4-6 July, 2012
 Fusion in EU projects and the Perception Approach Dr. Angelos Amditis interactive Summer School 4-6 July, 2012 Content Introduction Data fusion in european research projects EUCLIDE PReVENT-PF2 SAFESPOT
Fusion in EU projects and the Perception Approach Dr. Angelos Amditis interactive Summer School 4-6 July, 2012 Content Introduction Data fusion in european research projects EUCLIDE PReVENT-PF2 SAFESPOT
Deliverable D1.6 Initial System Specifications Executive Summary
 Deliverable D1.6 Initial System Specifications Executive Summary Version 1.0 Dissemination Project Coordination RE Ford Research and Advanced Engineering Europe Due Date 31.10.2010 Version Date 09.02.2011
Deliverable D1.6 Initial System Specifications Executive Summary Version 1.0 Dissemination Project Coordination RE Ford Research and Advanced Engineering Europe Due Date 31.10.2010 Version Date 09.02.2011
Autonomous Control for Unmanned
 Autonomous Control for Unmanned Surface Vehicles December 8, 2016 Carl Conti, CAPT, USN (Ret) Spatial Integrated Systems, Inc. SIS Corporate Profile Small Business founded in 1997, focusing on Research,
Autonomous Control for Unmanned Surface Vehicles December 8, 2016 Carl Conti, CAPT, USN (Ret) Spatial Integrated Systems, Inc. SIS Corporate Profile Small Business founded in 1997, focusing on Research,
Digital Engines for Smart and Connected Cars By Bob O Donnell, TECHnalysis Research Chief Analyst
 WHITE PAPER On Behalf of Digital Engines for Smart and Connected Cars By Bob O Donnell, TECHnalysis Research Chief Analyst SUMMARY Interest in advanced car electronics is extremely high, but there is a
WHITE PAPER On Behalf of Digital Engines for Smart and Connected Cars By Bob O Donnell, TECHnalysis Research Chief Analyst SUMMARY Interest in advanced car electronics is extremely high, but there is a
The 3xD Simulator for Intelligent Vehicles Professor Paul Jennings. 20 th October 2016
 The 3xD Simulator for Intelligent Vehicles Professor Paul Jennings 20 th October 2016 An academic department within the science faculty Established in 1980 by Professor Lord Bhattacharyya as Warwick Manufacturing
The 3xD Simulator for Intelligent Vehicles Professor Paul Jennings 20 th October 2016 An academic department within the science faculty Established in 1980 by Professor Lord Bhattacharyya as Warwick Manufacturing
Inertial Systems. Ekinox Series TACTICAL GRADE MEMS. Motion Sensing & Navigation IMU AHRS MRU INS VG
 Ekinox Series TACTICAL GRADE MEMS Inertial Systems IMU AHRS MRU INS VG ITAR Free 0.05 RMS Motion Sensing & Navigation AEROSPACE GROUND MARINE EKINOX SERIES R&D specialists usually compromise between high
Ekinox Series TACTICAL GRADE MEMS Inertial Systems IMU AHRS MRU INS VG ITAR Free 0.05 RMS Motion Sensing & Navigation AEROSPACE GROUND MARINE EKINOX SERIES R&D specialists usually compromise between high
NCCT IEEE PROJECTS ADVANCED ROBOTICS SOLUTIONS. Latest Projects, in various Domains. Promise for the Best Projects
 NCCT Promise for the Best Projects IEEE PROJECTS in various Domains Latest Projects, 2009-2010 ADVANCED ROBOTICS SOLUTIONS EMBEDDED SYSTEM PROJECTS Microcontrollers VLSI DSP Matlab Robotics ADVANCED ROBOTICS
NCCT Promise for the Best Projects IEEE PROJECTS in various Domains Latest Projects, 2009-2010 ADVANCED ROBOTICS SOLUTIONS EMBEDDED SYSTEM PROJECTS Microcontrollers VLSI DSP Matlab Robotics ADVANCED ROBOTICS
Creating Autonomous Vehicle Systems
 Creating Autonomous Vehicle Systems Copyright 2018 by Morgan & Claypool All rights reserved. No part of this publication may be reproduced, stored in a retrieval system, or transmitted in any form or by
Creating Autonomous Vehicle Systems Copyright 2018 by Morgan & Claypool All rights reserved. No part of this publication may be reproduced, stored in a retrieval system, or transmitted in any form or by
Safe, Efficient and Effective Testing of Connected and Autonomous Vehicles Paul Jennings. Franco-British Symposium on ITS 5 th October 2016
 Safe, Efficient and Effective Testing of Connected and Autonomous Vehicles Paul Jennings Franco-British Symposium on ITS 5 th October 2016 An academic department within the science faculty Established
Safe, Efficient and Effective Testing of Connected and Autonomous Vehicles Paul Jennings Franco-British Symposium on ITS 5 th October 2016 An academic department within the science faculty Established
Revised and extended. Accompanies this course pages heavier Perception treated more thoroughly. 1 - Introduction
 Topics to be Covered Coordinate frames and representations. Use of homogeneous transformations in robotics. Specification of position and orientation Manipulator forward and inverse kinematics Mobile Robots:
Topics to be Covered Coordinate frames and representations. Use of homogeneous transformations in robotics. Specification of position and orientation Manipulator forward and inverse kinematics Mobile Robots:
MEM380 Applied Autonomous Robots I Winter Feedback Control USARSim
 MEM380 Applied Autonomous Robots I Winter 2011 Feedback Control USARSim Transforming Accelerations into Position Estimates In a perfect world It s not a perfect world. We have noise and bias in our acceleration
MEM380 Applied Autonomous Robots I Winter 2011 Feedback Control USARSim Transforming Accelerations into Position Estimates In a perfect world It s not a perfect world. We have noise and bias in our acceleration
Combining ROS and AI for fail-operational automated driving
 Combining ROS and AI for fail-operational automated driving Prof. Dr. Daniel Watzenig Virtual Vehicle Research Center, Graz, Austria and Institute of Automation and Control at Graz University of Technology
Combining ROS and AI for fail-operational automated driving Prof. Dr. Daniel Watzenig Virtual Vehicle Research Center, Graz, Austria and Institute of Automation and Control at Graz University of Technology
AI Application Processing Requirements
 AI Application Processing Requirements 1 Low Medium High Sensor analysis Activity Recognition (motion sensors) Stress Analysis or Attention Analysis Audio & sound Speech Recognition Object detection Computer
AI Application Processing Requirements 1 Low Medium High Sensor analysis Activity Recognition (motion sensors) Stress Analysis or Attention Analysis Audio & sound Speech Recognition Object detection Computer
PerSEE: a Central Sensors Fusion Electronic Control Unit for the development of perception-based ADAS
 10-4 MVA2015 IAPR International Conference on Machine Vision Applications, May 18-22, 2015, Tokyo, JAPAN PerSEE: a Central Sensors Fusion Electronic Control Unit for the development of perception-based
10-4 MVA2015 IAPR International Conference on Machine Vision Applications, May 18-22, 2015, Tokyo, JAPAN PerSEE: a Central Sensors Fusion Electronic Control Unit for the development of perception-based
Planning in autonomous mobile robotics
 Sistemi Intelligenti Corso di Laurea in Informatica, A.A. 2017-2018 Università degli Studi di Milano Planning in autonomous mobile robotics Nicola Basilico Dipartimento di Informatica Via Comelico 39/41-20135
Sistemi Intelligenti Corso di Laurea in Informatica, A.A. 2017-2018 Università degli Studi di Milano Planning in autonomous mobile robotics Nicola Basilico Dipartimento di Informatica Via Comelico 39/41-20135
A Multimodal Approach for Determination of Vehicle Position
 A Multimodal Approach for Determination of Vehicle Position Artis Mednis Digital Signal Processing Laboratory, Institute of Electronics and Computer Science, 14 Dzerbenes Str., Riga, LV 1006, Latvia, artis.mednis@edi.lv
A Multimodal Approach for Determination of Vehicle Position Artis Mednis Digital Signal Processing Laboratory, Institute of Electronics and Computer Science, 14 Dzerbenes Str., Riga, LV 1006, Latvia, artis.mednis@edi.lv
Automatic Maneuver Recognition in the Automobile: the Fusion of Uncertain Sensor Values using Bayesian Models
 Automatic Maneuver Recognition in the Automobile: the Fusion of Uncertain Sensor Values using Bayesian Models Arati Gerdes Institute of Transportation Systems German Aerospace Center, Lilienthalplatz 7,
Automatic Maneuver Recognition in the Automobile: the Fusion of Uncertain Sensor Values using Bayesian Models Arati Gerdes Institute of Transportation Systems German Aerospace Center, Lilienthalplatz 7,
A MULTI-SENSOR FUSION FOR INDOOR-OUTDOOR LOCALIZATION USING A PARTICLE FILTER
 A MULTI-SENSOR FUSION FOR INDOOR-OUTDOOR LOCALIZATION USING A PARTICLE FILTER Abdelghani BELAKBIR 1, Mustapha AMGHAR 1, Nawal SBITI 1, Amine RECHICHE 1 ABSTRACT: The location of people and objects relative
A MULTI-SENSOR FUSION FOR INDOOR-OUTDOOR LOCALIZATION USING A PARTICLE FILTER Abdelghani BELAKBIR 1, Mustapha AMGHAR 1, Nawal SBITI 1, Amine RECHICHE 1 ABSTRACT: The location of people and objects relative
Resilient and Accurate Autonomous Vehicle Navigation via Signals of Opportunity
 Resilient and Accurate Autonomous Vehicle Navigation via Signals of Opportunity Zak M. Kassas Autonomous Systems Perception, Intelligence, and Navigation (ASPIN) Laboratory University of California, Riverside
Resilient and Accurate Autonomous Vehicle Navigation via Signals of Opportunity Zak M. Kassas Autonomous Systems Perception, Intelligence, and Navigation (ASPIN) Laboratory University of California, Riverside
* Intelli Robotic Wheel Chair for Specialty Operations & Physically Challenged
 ADVANCED ROBOTICS SOLUTIONS * Intelli Mobile Robot for Multi Specialty Operations * Advanced Robotic Pick and Place Arm and Hand System * Automatic Color Sensing Robot using PC * AI Based Image Capturing
ADVANCED ROBOTICS SOLUTIONS * Intelli Mobile Robot for Multi Specialty Operations * Advanced Robotic Pick and Place Arm and Hand System * Automatic Color Sensing Robot using PC * AI Based Image Capturing
Volkswagen Group: Leveraging VIRES VTD to Design a Cooperative Driver Assistance System
 Volkswagen Group: Leveraging VIRES VTD to Design a Cooperative Driver Assistance System By Dr. Kai Franke, Development Online Driver Assistance Systems, Volkswagen AG 10 Engineering Reality Magazine A
Volkswagen Group: Leveraging VIRES VTD to Design a Cooperative Driver Assistance System By Dr. Kai Franke, Development Online Driver Assistance Systems, Volkswagen AG 10 Engineering Reality Magazine A
Autonomous and Autonomic Systems: With Applications to NASA Intelligent Spacecraft Operations and Exploration Systems
 Walt Truszkowski, Harold L. Hallock, Christopher Rouff, Jay Karlin, James Rash, Mike Hinchey, and Roy Sterritt Autonomous and Autonomic Systems: With Applications to NASA Intelligent Spacecraft Operations
Walt Truszkowski, Harold L. Hallock, Christopher Rouff, Jay Karlin, James Rash, Mike Hinchey, and Roy Sterritt Autonomous and Autonomic Systems: With Applications to NASA Intelligent Spacecraft Operations
Visione per il veicolo Paolo Medici 2017/ Visual Perception
 Visione per il veicolo Paolo Medici 2017/2018 02 Visual Perception Today Sensor Suite for Autonomous Vehicle ADAS Hardware for ADAS Sensor Suite Which sensor do you know? Which sensor suite for Which algorithms
Visione per il veicolo Paolo Medici 2017/2018 02 Visual Perception Today Sensor Suite for Autonomous Vehicle ADAS Hardware for ADAS Sensor Suite Which sensor do you know? Which sensor suite for Which algorithms
The Building Blocks of Autonomous Control. Phil Magney, Founder & Principal Advisor July 2016
 The Building Blocks of Autonomous Control Phil Magney, Founder & Principal Advisor July 2016 Agenda VSI Remarks The Building Blocks of Autonomy Elements of Autonomous Control Motion Control (path, maneuver,
The Building Blocks of Autonomous Control Phil Magney, Founder & Principal Advisor July 2016 Agenda VSI Remarks The Building Blocks of Autonomy Elements of Autonomous Control Motion Control (path, maneuver,
ARGUING THE SAFETY OF MACHINE LEARNING FOR HIGHLY AUTOMATED DRIVING USING ASSURANCE CASES LYDIA GAUERHOF BOSCH CORPORATE RESEARCH
 ARGUING THE SAFETY OF MACHINE LEARNING FOR HIGHLY AUTOMATED DRIVING USING ASSURANCE CASES 14.12.2017 LYDIA GAUERHOF BOSCH CORPORATE RESEARCH Arguing Safety of Machine Learning for Highly Automated Driving
ARGUING THE SAFETY OF MACHINE LEARNING FOR HIGHLY AUTOMATED DRIVING USING ASSURANCE CASES 14.12.2017 LYDIA GAUERHOF BOSCH CORPORATE RESEARCH Arguing Safety of Machine Learning for Highly Automated Driving
The Autonomous Robots Lab. Kostas Alexis
 The Autonomous Robots Lab Kostas Alexis Who we are? Established at January 2016 Current Team: 1 Head, 1 Senior Postdoctoral Researcher, 3 PhD Candidates, 1 Graduate Research Assistant, 2 Undergraduate
The Autonomous Robots Lab Kostas Alexis Who we are? Established at January 2016 Current Team: 1 Head, 1 Senior Postdoctoral Researcher, 3 PhD Candidates, 1 Graduate Research Assistant, 2 Undergraduate
SENLUTION Miniature Angular & Heading Reference System The World s Smallest Mini-AHRS
 SENLUTION Miniature Angular & Heading Reference System The World s Smallest Mini-AHRS MotionCore, the smallest size AHRS in the world, is an ultra-small form factor, highly accurate inertia system based
SENLUTION Miniature Angular & Heading Reference System The World s Smallest Mini-AHRS MotionCore, the smallest size AHRS in the world, is an ultra-small form factor, highly accurate inertia system based
Ubiquitous Positioning: A Pipe Dream or Reality?
 Ubiquitous Positioning: A Pipe Dream or Reality? Professor Terry Moore The University of What is Ubiquitous Positioning? Multi-, low-cost and robust positioning Based on single or multiple users Different
Ubiquitous Positioning: A Pipe Dream or Reality? Professor Terry Moore The University of What is Ubiquitous Positioning? Multi-, low-cost and robust positioning Based on single or multiple users Different
Implementation and Performance Evaluation of a Fast Relocation Method in a GPS/SINS/CSAC Integrated Navigation System Hardware Prototype
 This article has been accepted and published on J-STAGE in advance of copyediting. Content is final as presented. Implementation and Performance Evaluation of a Fast Relocation Method in a GPS/SINS/CSAC
This article has been accepted and published on J-STAGE in advance of copyediting. Content is final as presented. Implementation and Performance Evaluation of a Fast Relocation Method in a GPS/SINS/CSAC
Intelligent Transport Systems and GNSS. ITSNT 2017 ENAC, Toulouse, France 11/ Nobuaki Kubo (TUMSAT)
") Intelligent Transport Systems and GNSS ITSNT 2017 ENAC, Toulouse, France 11/14-17 2017 Nobuaki Kubo (TUMSAT) Contents ITS applications in Japan How can GNSS contribute to ITS? Current performance of GNSS
Intelligent Transport Systems and GNSS ITSNT 2017 ENAC, Toulouse, France 11/14-17 2017 Nobuaki Kubo (TUMSAT) Contents ITS applications in Japan How can GNSS contribute to ITS? Current performance of GNSS
Funzionalità per la navigazione di robot mobili. Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo
 Funzionalità per la navigazione di robot mobili Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Variability of the Robotic Domain UNIBG - Corso di Robotica - Prof. Brugali Tourist
Funzionalità per la navigazione di robot mobili Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Variability of the Robotic Domain UNIBG - Corso di Robotica - Prof. Brugali Tourist
Locating- and Communication Technologies for Smart Objects
 Locating- and Communication Technologies for Smart Objects Thomas von der Grün, 25.09.2014 Fraunhofer IIS Wireless Positioning and Communication Technologies 130 scientists/engineers in Nuremberg provide:
Locating- and Communication Technologies for Smart Objects Thomas von der Grün, 25.09.2014 Fraunhofer IIS Wireless Positioning and Communication Technologies 130 scientists/engineers in Nuremberg provide:
Artificial Intelligence for Social Impact. February 8, 2018 Dr. Cara LaPointe Senior Fellow Georgetown University
 Artificial Intelligence for Social Impact February 8, 2018 Dr. Cara LaPointe Senior Fellow Georgetown University What is Artificial Intelligence? 2 Artificial Intelligence: A Working Definition The capability
Artificial Intelligence for Social Impact February 8, 2018 Dr. Cara LaPointe Senior Fellow Georgetown University What is Artificial Intelligence? 2 Artificial Intelligence: A Working Definition The capability
Virtual testing by coupling high fidelity vehicle simulation with microscopic traffic flow simulation
 DYNA4 with DYNAanimation in Co-Simulation with SUMO vehicle under test Virtual testing by coupling high fidelity vehicle simulation with microscopic traffic flow simulation Dr.-Ing. Jakob Kaths TESIS GmbH
DYNA4 with DYNAanimation in Co-Simulation with SUMO vehicle under test Virtual testing by coupling high fidelity vehicle simulation with microscopic traffic flow simulation Dr.-Ing. Jakob Kaths TESIS GmbH
HAVEit Highly Automated Vehicles for Intelligent Transport
 HAVEit Highly Automated Vehicles for Intelligent Transport Holger Zeng Project Manager CONTINENTAL AUTOMOTIVE HAVEit General Information Project full title: Highly Automated Vehicles for Intelligent Transport
HAVEit Highly Automated Vehicles for Intelligent Transport Holger Zeng Project Manager CONTINENTAL AUTOMOTIVE HAVEit General Information Project full title: Highly Automated Vehicles for Intelligent Transport
BORDERLESS RESEARCH FOR SAFE MOBILITY
 BORDERLESS RESEARCH FOR SAFE MOBILITY WELCOME TO SAFER. WE RESEARCH TO SAVE LIVES, PREVENT INJURIES AND ENABLE SAFE MOBILITY. TOGETHER. Zero accidents and zero injuries in traffic that s our drive and
BORDERLESS RESEARCH FOR SAFE MOBILITY WELCOME TO SAFER. WE RESEARCH TO SAVE LIVES, PREVENT INJURIES AND ENABLE SAFE MOBILITY. TOGETHER. Zero accidents and zero injuries in traffic that s our drive and
Unlock the power of location. Gjermund Jakobsen ITS Konferansen 2017
 Unlock the power of location Gjermund Jakobsen ITS Konferansen 2017 50B 200 Countries mapped HERE in numbers Our world in numbers 7,000+ Employees in 56 countries focused on delivering the world s best
Unlock the power of location Gjermund Jakobsen ITS Konferansen 2017 50B 200 Countries mapped HERE in numbers Our world in numbers 7,000+ Employees in 56 countries focused on delivering the world s best
LOCALIZATION WITH GPS UNAVAILABLE
 LOCALIZATION WITH GPS UNAVAILABLE ARES SWIEE MEETING - ROME, SEPT. 26 2014 TOR VERGATA UNIVERSITY Summary Introduction Technology State of art Application Scenarios vs. Technology Advanced Research in
LOCALIZATION WITH GPS UNAVAILABLE ARES SWIEE MEETING - ROME, SEPT. 26 2014 TOR VERGATA UNIVERSITY Summary Introduction Technology State of art Application Scenarios vs. Technology Advanced Research in
Advanced Robotics Introduction
 Advanced Robotics Introduction Institute for Software Technology 1 Motivation Agenda Some Definitions and Thought about Autonomous Robots History Challenges Application Examples 2 http://youtu.be/rvnvnhim9kg
Advanced Robotics Introduction Institute for Software Technology 1 Motivation Agenda Some Definitions and Thought about Autonomous Robots History Challenges Application Examples 2 http://youtu.be/rvnvnhim9kg
Tech Center a-drive: EUR 7.5 Million for Automated Driving
 No. 005 lg January 18, 2016 Joint Press Release of the Partners Tech Center a-drive: EUR 7.5 Million for Automated Driving Kick-off of Cooperation Project of Science and Industry in the Presence of Minister
No. 005 lg January 18, 2016 Joint Press Release of the Partners Tech Center a-drive: EUR 7.5 Million for Automated Driving Kick-off of Cooperation Project of Science and Industry in the Presence of Minister
Test-bed for Unified Perception & Decision Architecture
 Test-bed for Unified Perception & Decision Architecture Luca Bombini, Stefano Cattani, Pietro Cerri, Rean Isabella Fedriga, Mirko Felisa, and Pier Paolo Porta Abstract This paper presents the test-bed
Test-bed for Unified Perception & Decision Architecture Luca Bombini, Stefano Cattani, Pietro Cerri, Rean Isabella Fedriga, Mirko Felisa, and Pier Paolo Porta Abstract This paper presents the test-bed
Baset Adult-Size 2016 Team Description Paper
 Baset Adult-Size 2016 Team Description Paper Mojtaba Hosseini, Vahid Mohammadi, Farhad Jafari 2, Dr. Esfandiar Bamdad 1 1 Humanoid Robotic Laboratory, Robotic Center, Baset Pazhuh Tehran company. No383,
Baset Adult-Size 2016 Team Description Paper Mojtaba Hosseini, Vahid Mohammadi, Farhad Jafari 2, Dr. Esfandiar Bamdad 1 1 Humanoid Robotic Laboratory, Robotic Center, Baset Pazhuh Tehran company. No383,
Plan for the 2nd hour. What is AI. Acting humanly: The Turing test. EDAF70: Applied Artificial Intelligence Agents (Chapter 2 of AIMA)
") Plan for the 2nd hour EDAF70: Applied Artificial Intelligence (Chapter 2 of AIMA) Jacek Malec Dept. of Computer Science, Lund University, Sweden January 17th, 2018 What is an agent? PEAS (Performance measure,
Plan for the 2nd hour EDAF70: Applied Artificial Intelligence (Chapter 2 of AIMA) Jacek Malec Dept. of Computer Science, Lund University, Sweden January 17th, 2018 What is an agent? PEAS (Performance measure,
Positioning Challenges in Cooperative Vehicular Safety Systems
 Positioning Challenges in Cooperative Vehicular Safety Systems Dr. Luca Delgrossi Mercedes-Benz Research & Development North America, Inc. October 15, 2009 Positioning for Automotive Navigation Personal
Positioning Challenges in Cooperative Vehicular Safety Systems Dr. Luca Delgrossi Mercedes-Benz Research & Development North America, Inc. October 15, 2009 Positioning for Automotive Navigation Personal
3D Virtual Training Systems Architecture
 3D Virtual Training Systems Architecture January 21-24, 2018 ISO/IEC JTC 1/SC 24/WG 9 & Web3D Meetings Seoul, Korea Myeong Won Lee (U. of Suwon) Virtual Training Systems Definition Training systems using
3D Virtual Training Systems Architecture January 21-24, 2018 ISO/IEC JTC 1/SC 24/WG 9 & Web3D Meetings Seoul, Korea Myeong Won Lee (U. of Suwon) Virtual Training Systems Definition Training systems using
Available theses (October 2012) MERLIN Group
 MERLIN Group") Available theses (October 2012) MERLIN Group Politecnico di Milano - Dipartimento di Elettronica e Informazione MERLIN Group 2 Luca Bascetta bascetta@elet.polimi.it Gianni Ferretti ferretti@elet.polimi.it
Available theses (October 2012) MERLIN Group Politecnico di Milano - Dipartimento di Elettronica e Informazione MERLIN Group 2 Luca Bascetta bascetta@elet.polimi.it Gianni Ferretti ferretti@elet.polimi.it
Smart Space - An Indoor Positioning Framework
 Smart Space - An Indoor Positioning Framework Droidcon 09 Berlin, 4.11.2009 Stephan Linzner, Daniel Kersting, Dr. Christian Hoene Universität Tübingen Research Group on Interactive Communication Systems
Smart Space - An Indoor Positioning Framework Droidcon 09 Berlin, 4.11.2009 Stephan Linzner, Daniel Kersting, Dr. Christian Hoene Universität Tübingen Research Group on Interactive Communication Systems
CODEVINTEC. Miniature and accurate IMU, AHRS, INS/GNSS Attitude and Heading Reference Systems
 45 27 39.384 N 9 07 30.145 E Miniature and accurate IMU, AHRS, INS/GNSS Attitude and Heading Reference Systems Aerospace Land/Automotive Marine Subsea Miniature inertial sensors 0.1 Ellipse Series New
45 27 39.384 N 9 07 30.145 E Miniature and accurate IMU, AHRS, INS/GNSS Attitude and Heading Reference Systems Aerospace Land/Automotive Marine Subsea Miniature inertial sensors 0.1 Ellipse Series New