Using FMI/ SSP for Development of Autonomous Driving
|
|
|
- Avis Lambert
- 6 years ago
- Views:
Transcription
 FMI User")

1 Using FMI/ SSP for Development of Autonomous Driving presented by Jochen Köhler (ZF) FMI User Meeting Prague / Czech Republic H.M. Heinkel S.Rude P. R. Mai J. Köhler M. Rühl / A. Pillekeit
2 Motivation I Autonomous Driving is a Megatrend for the automotive industry Intensive cooperation of companies is mandatory Simulation is essential for efficient development and future homologation of products Platforms and interchange standards are needed and decided upon in the very near term (< 1-2 years). Great chance for further FMI impact, however limited time horizon for needed evolution







3 Motivation II Sensors System Fct Server, Cloud Connectivity 3D Road Network & Infrastructure Freeway, rural & Urban roads, Buildings Traffic signs, traffic lights Street markings Traffic Vehicles, Pedestrians Objects al Conditions Weather, Lighting Friction coefficient (Models) Radar Lidar Camera Inertial & wheel speed sensors GPS, map data HAD System Functional Chain Perception Decision Making Odometry/ Localisation Vehicle Motion Control Motion Planning & Control Actuator Management Test Scenarios Simulation Driver Vehicle Model Actuation Brake Steering Power Train HAD & Connected System Simulation HAD: Highly Automated Driving
4 Motivation II FMI provides insufficient datatypes for sensors Sensors System Fct Server, Cloud Connectivity 3D Road Network & Infrastructure Freeway, rural & Urban roads, Buildings Traffic signs, traffic lights Street markings Traffic Vehicles, Pedestrians Objects al Conditions Weather, Lighting Friction coefficient (Models) Radar Lidar Camera Inertial & wheel speed sensors GPS, map data HAD System Functional Chain Perception Decision Making Odometry/ Localisation Vehicle Motion Control Motion Planning & Control Actuator Management Test Scenarios Simulation Driver Vehicle Model Actuation Brake Steering Power Train FMI Co Simulation HAD & Connected System Simulation HAD: Highly Automated Driving
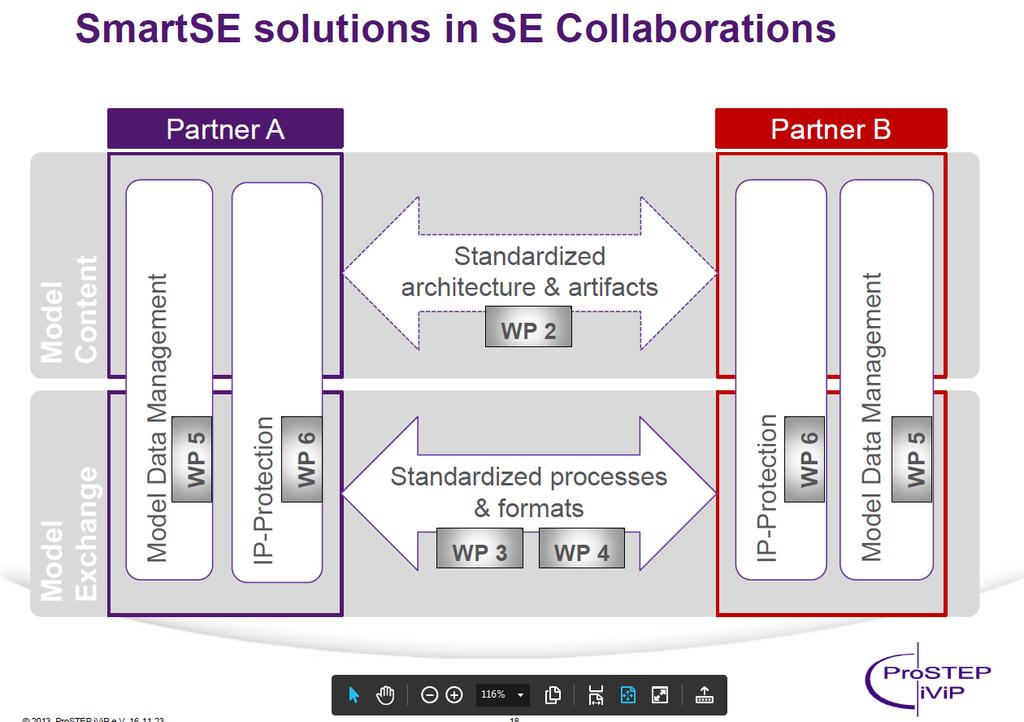
5 Enviroment Usage of SSP in defining Simulation Architecture for ADAS in ZF Signal dictionaries Driver ADAS functions Infrastructure Behavior Human mechanics HMI Sensing Car2X Driveline Chassis Sensors Perception Gearbox Actuators Cameras Traffic Planning Actuators Axles Radar Weather Driveline Wheels Lidar Actuating Ego-Vehicle
6
7 Usage of FMI / SSP for Autonomous Driving Motivation: AD system models require integration of environment simulation, sensor models, AD algorithm components with driving dynamics Sampled systems, requiring complex data types (object lists, reflex lists, ) with dynamic sizing and large scalar content (>> scalars) Complex connectivity, exchange of connected systems between platforms Requirements: Extension of FMI with more interface data types: Opaque binary data types (e.g. length-terminated, MIME-Type tagged) Better: Integration of proper Interface Description Language Not needed: Use of those data types as continuous variables in ADEs Extension of SSP with matching connector types. Activities: SmartSE: Unification of driver models, common driver model interfaces FMI + Open Simulation Interface as sensor model interface standard
8 Requirements to FMI / SSP Better support in FMI (2.1?) for sampled data systems in FMI for Model exchange or hybrid Co- Simulation include sensor, controller and ECU-SW models in system simulation. Improve Standard compliance of FMI supporting tools by extended cross-checking in order to fulfill requirements to support homologation SSP Standard must be compatible / convertable to ASAM Standard used for ECU-SW description
9 Conclusions Standards are essential for cross-company development and simulation of HAD systems A few major points are presented here Standards for sensor interfaces Extension of FMI standard Standards for connection and parametrization of FMUs SSP Shared good practice / usage hints for FMI, co-simulation Approach for cross divisional specification, creation and maintenance of standardized models
10 Backup
11 Driver Model as Example s_vehicle Drive Cycle FMU v_set Driver FMU accelerator brake Vehicle FMU s_vehicle v_vehicle slope v_vehicle FMUs from 5 different companies combined to System Model For each FMU different variants used (6 cycle-, 4 driver-, 3 vehicle-fmu variants) In sum 72 FMU-combinations created and simulated on dspace VEOS platform Results: All FMU combinations can be simulated All driver FMUs allow to follow velocity profiles like EUDC, FTP75, WLTC, For seamless exchange between companies, FMU interface specification must be very accurate and ideally machine readable Template FMUs according to proposal from Modelica SSP project could be helpful: Template FMUs could be generated from System Model Template FMUs should be importable in modelling tools to transport interface
Virtual Testing of Autonomous Vehicles
 Virtual Testing of Autonomous Vehicles Mike Dempsey Claytex Services Limited Software, Consultancy, Training Based in Leamington Spa, UK Office in Cape Town, South Africa Experts in Systems Engineering,
Virtual Testing of Autonomous Vehicles Mike Dempsey Claytex Services Limited Software, Consultancy, Training Based in Leamington Spa, UK Office in Cape Town, South Africa Experts in Systems Engineering,
David Howarth. Business Development Manager Americas
 David Howarth Business Development Manager Americas David Howarth IPG Automotive USA, Inc. Business Development Manager Americas david.howarth@ipg-automotive.com ni.com Testing Automated Driving Functions
David Howarth Business Development Manager Americas David Howarth IPG Automotive USA, Inc. Business Development Manager Americas david.howarth@ipg-automotive.com ni.com Testing Automated Driving Functions
DLR s ROboMObil HIL Simulator Using FMI 2.0 Technology on dspace SCALEXIO Real-time Hardware. Andreas Pillekeit - dspace. Jonathan Brembeck DLR
 DLR.de Chart 1 DLR s ROboMObil HIL Simulator Using FMI 2.0 Technology on dspace SCALEXIO Real-time Hardware FMI User Meeting at the Modelica Conference 2017 Jonathan Brembeck DLR Andreas Pillekeit - dspace
DLR.de Chart 1 DLR s ROboMObil HIL Simulator Using FMI 2.0 Technology on dspace SCALEXIO Real-time Hardware FMI User Meeting at the Modelica Conference 2017 Jonathan Brembeck DLR Andreas Pillekeit - dspace
ADAS Development using Advanced Real-Time All-in-the-Loop Simulators. Roberto De Vecchi VI-grade Enrico Busto - AddFor
 ADAS Development using Advanced Real-Time All-in-the-Loop Simulators Roberto De Vecchi VI-grade Enrico Busto - AddFor The Scenario The introduction of ADAS and AV has created completely new challenges
ADAS Development using Advanced Real-Time All-in-the-Loop Simulators Roberto De Vecchi VI-grade Enrico Busto - AddFor The Scenario The introduction of ADAS and AV has created completely new challenges
23270: AUGMENTED REALITY FOR NAVIGATION AND INFORMATIONAL ADAS. Sergii Bykov Technical Lead Machine Learning 12 Oct 2017
 23270: AUGMENTED REALITY FOR NAVIGATION AND INFORMATIONAL ADAS Sergii Bykov Technical Lead Machine Learning 12 Oct 2017 Product Vision Company Introduction Apostera GmbH with headquarter in Munich, was
23270: AUGMENTED REALITY FOR NAVIGATION AND INFORMATIONAL ADAS Sergii Bykov Technical Lead Machine Learning 12 Oct 2017 Product Vision Company Introduction Apostera GmbH with headquarter in Munich, was
GNSS in Autonomous Vehicles MM Vision
 GNSS in Autonomous Vehicles MM Vision MM Technology Innovation Automated Driving Technologies (ADT) Evaldo Bruci Context & motivation Within the robotic paradigm Magneti Marelli chose Think & Decision
GNSS in Autonomous Vehicles MM Vision MM Technology Innovation Automated Driving Technologies (ADT) Evaldo Bruci Context & motivation Within the robotic paradigm Magneti Marelli chose Think & Decision
Physics Based Sensor simulation
 Physics Based Sensor simulation Jordan Gorrochotegui - Product Manager Software and Services Mike Phillips Software Engineer Restricted Siemens AG 2017 Realize innovation. Siemens offers solutions across
Physics Based Sensor simulation Jordan Gorrochotegui - Product Manager Software and Services Mike Phillips Software Engineer Restricted Siemens AG 2017 Realize innovation. Siemens offers solutions across
Virtual Homologation of Software- Intensive Safety Systems: From ESC to Automated Driving
 Virtual Homologation of Software- Intensive Safety Systems: From ESC to Automated Driving Dr. Houssem Abdellatif Global Head Autonomous Driving & ADAS TÜV SÜD Auto Service Christian Gnandt Lead Engineer
Virtual Homologation of Software- Intensive Safety Systems: From ESC to Automated Driving Dr. Houssem Abdellatif Global Head Autonomous Driving & ADAS TÜV SÜD Auto Service Christian Gnandt Lead Engineer
VSI Labs The Build Up of Automated Driving
 VSI Labs The Build Up of Automated Driving October - 2017 Agenda Opening Remarks Introduction and Background Customers Solutions VSI Labs Some Industry Content Opening Remarks Automated vehicle systems
VSI Labs The Build Up of Automated Driving October - 2017 Agenda Opening Remarks Introduction and Background Customers Solutions VSI Labs Some Industry Content Opening Remarks Automated vehicle systems
Perception platform and fusion modules results. Angelos Amditis - ICCS and Lali Ghosh - DEL interactive final event
 Perception platform and fusion modules results Angelos Amditis - ICCS and Lali Ghosh - DEL interactive final event 20 th -21 st November 2013 Agenda Introduction Environment Perception in Intelligent Transport
Perception platform and fusion modules results Angelos Amditis - ICCS and Lali Ghosh - DEL interactive final event 20 th -21 st November 2013 Agenda Introduction Environment Perception in Intelligent Transport
Function architectures relevance in automotive research and education Bengt Jacobson, Chalmers
 Function architectures relevance in automotive research and education Bengt Jacobson, Chalmers 1 Why and what is Function Architecture 2 Why architectures? A vehicle is a complex product but still affordable
Function architectures relevance in automotive research and education Bengt Jacobson, Chalmers 1 Why and what is Function Architecture 2 Why architectures? A vehicle is a complex product but still affordable
Volkswagen Group: Leveraging VIRES VTD to Design a Cooperative Driver Assistance System
 Volkswagen Group: Leveraging VIRES VTD to Design a Cooperative Driver Assistance System By Dr. Kai Franke, Development Online Driver Assistance Systems, Volkswagen AG 10 Engineering Reality Magazine A
Volkswagen Group: Leveraging VIRES VTD to Design a Cooperative Driver Assistance System By Dr. Kai Franke, Development Online Driver Assistance Systems, Volkswagen AG 10 Engineering Reality Magazine A
Significant Reduction of Validation Efforts for Dynamic Light Functions with FMI for Multi-Domain Integration and Test Platforms
 Significant Reduction of Validation Efforts for Dynamic Light Functions with FMI for Multi-Domain Integration and Test Platforms Dr. Stefan-Alexander Schneider Johannes Frimberger BMW AG, 80788 Munich,
Significant Reduction of Validation Efforts for Dynamic Light Functions with FMI for Multi-Domain Integration and Test Platforms Dr. Stefan-Alexander Schneider Johannes Frimberger BMW AG, 80788 Munich,
Virtual testing by coupling high fidelity vehicle simulation with microscopic traffic flow simulation
 DYNA4 with DYNAanimation in Co-Simulation with SUMO vehicle under test Virtual testing by coupling high fidelity vehicle simulation with microscopic traffic flow simulation Dr.-Ing. Jakob Kaths TESIS GmbH
DYNA4 with DYNAanimation in Co-Simulation with SUMO vehicle under test Virtual testing by coupling high fidelity vehicle simulation with microscopic traffic flow simulation Dr.-Ing. Jakob Kaths TESIS GmbH
SIS63-Building the Future-Advanced Integrated Safety Applications: interactive Perception platform and fusion modules results
 SIS63-Building the Future-Advanced Integrated Safety Applications: interactive Perception platform and fusion modules results Angelos Amditis (ICCS) and Lali Ghosh (DEL) 18 th October 2013 20 th ITS World
SIS63-Building the Future-Advanced Integrated Safety Applications: interactive Perception platform and fusion modules results Angelos Amditis (ICCS) and Lali Ghosh (DEL) 18 th October 2013 20 th ITS World
Intelligent Technology for More Advanced Autonomous Driving
 FEATURED ARTICLES Autonomous Driving Technology for Connected Cars Intelligent Technology for More Advanced Autonomous Driving Autonomous driving is recognized as an important technology for dealing with
FEATURED ARTICLES Autonomous Driving Technology for Connected Cars Intelligent Technology for More Advanced Autonomous Driving Autonomous driving is recognized as an important technology for dealing with
A.I in Automotive? Why and When.
 A.I in Automotive? Why and When. AGENDA 01 02 03 04 Definitions A.I? A.I in automotive Now? Next big A.I breakthrough in Automotive 01 DEFINITIONS DEFINITIONS Artificial Intelligence Artificial Intelligence:
A.I in Automotive? Why and When. AGENDA 01 02 03 04 Definitions A.I? A.I in automotive Now? Next big A.I breakthrough in Automotive 01 DEFINITIONS DEFINITIONS Artificial Intelligence Artificial Intelligence:
HAVEit Highly Automated Vehicles for Intelligent Transport
 HAVEit Highly Automated Vehicles for Intelligent Transport Holger Zeng Project Manager CONTINENTAL AUTOMOTIVE HAVEit General Information Project full title: Highly Automated Vehicles for Intelligent Transport
HAVEit Highly Automated Vehicles for Intelligent Transport Holger Zeng Project Manager CONTINENTAL AUTOMOTIVE HAVEit General Information Project full title: Highly Automated Vehicles for Intelligent Transport
Virtual Validation with dspace Benefits the whole ECU development process
 www.dspace.com Virtual Validation with dspace Benefits the whole ECU development process Virtual Validation / Content Virtual Validation Virtual Validation 3 Definition of a Virtual ECU 4 Tool Chain for
www.dspace.com Virtual Validation with dspace Benefits the whole ECU development process Virtual Validation / Content Virtual Validation Virtual Validation 3 Definition of a Virtual ECU 4 Tool Chain for
Cyber-Physical Systems: Challenges for Systems Engineering
 Cyber-Physical Systems: Challenges for Systems Engineering agendacps Closing Event April 12th, 2012, EIT ICT Labs, Berlin Eva Geisberger fortiss An-Institut der Technischen Universität München Cyber-Physical
Cyber-Physical Systems: Challenges for Systems Engineering agendacps Closing Event April 12th, 2012, EIT ICT Labs, Berlin Eva Geisberger fortiss An-Institut der Technischen Universität München Cyber-Physical
MotionDesk. 3-D online animation of simulated mechanical systems in real time. Highlights
 MotionDesk 3-D online animation of simulated mechanical systems in real time Highlights Tight integration to ModelDesk and ASM Enhanced support for all aspects of advanced driver assistance systems (ADAS)
MotionDesk 3-D online animation of simulated mechanical systems in real time Highlights Tight integration to ModelDesk and ASM Enhanced support for all aspects of advanced driver assistance systems (ADAS)
Cooperative navigation (part II)
") Cooperative navigation (part II) An example using foot-mounted INS and UWB-transceivers Jouni Rantakokko Aim Increased accuracy during long-term operations in GNSS-challenged environments for - First responders
Cooperative navigation (part II) An example using foot-mounted INS and UWB-transceivers Jouni Rantakokko Aim Increased accuracy during long-term operations in GNSS-challenged environments for - First responders
CISC 1600 Lecture 3.4 Agent-based programming
 CISC 1600 Lecture 3.4 Agent-based programming Topics: Agents and environments Rationality Performance, Environment, Actuators, Sensors Four basic types of agents Multi-agent systems NetLogo Agents interact
CISC 1600 Lecture 3.4 Agent-based programming Topics: Agents and environments Rationality Performance, Environment, Actuators, Sensors Four basic types of agents Multi-agent systems NetLogo Agents interact
The 3xD Simulator for Intelligent Vehicles Professor Paul Jennings. 20 th October 2016
 The 3xD Simulator for Intelligent Vehicles Professor Paul Jennings 20 th October 2016 An academic department within the science faculty Established in 1980 by Professor Lord Bhattacharyya as Warwick Manufacturing
The 3xD Simulator for Intelligent Vehicles Professor Paul Jennings 20 th October 2016 An academic department within the science faculty Established in 1980 by Professor Lord Bhattacharyya as Warwick Manufacturing
Introduction to Computer Science
 Introduction to Computer Science CSCI 109 Andrew Goodney Fall 2017 China Tianhe-2 Robotics Nov. 20, 2017 Schedule 1 Robotics ì Acting on the physical world 2 What is robotics? uthe study of the intelligent
Introduction to Computer Science CSCI 109 Andrew Goodney Fall 2017 China Tianhe-2 Robotics Nov. 20, 2017 Schedule 1 Robotics ì Acting on the physical world 2 What is robotics? uthe study of the intelligent
Final Report Non Hit Car And Truck
 Final Report Non Hit Car And Truck 2010-2013 Project within Vehicle and Traffic Safety Author: Anders Almevad Date 2014-03-17 Content 1. Executive summary... 3 2. Background... 3. Objective... 4. Project
Final Report Non Hit Car And Truck 2010-2013 Project within Vehicle and Traffic Safety Author: Anders Almevad Date 2014-03-17 Content 1. Executive summary... 3 2. Background... 3. Objective... 4. Project
Tsuyoshi Sato PIONEER CORPORATION July 6, 2017
 Technology R&D for for Highly Highly Automated Automated Driving Driving Tsuyoshi Sato PIONEER CORPORATION July 6, 2017 Agenda Introduction Overview Architecture R&D for Highly Automated Driving Hardware
Technology R&D for for Highly Highly Automated Automated Driving Driving Tsuyoshi Sato PIONEER CORPORATION July 6, 2017 Agenda Introduction Overview Architecture R&D for Highly Automated Driving Hardware
interactive IP: Perception platform and modules
 interactive IP: Perception platform and modules Angelos Amditis, ICCS 19 th ITS-WC-SIS76: Advanced integrated safety applications based on enhanced perception, active interventions and new advanced sensors
interactive IP: Perception platform and modules Angelos Amditis, ICCS 19 th ITS-WC-SIS76: Advanced integrated safety applications based on enhanced perception, active interventions and new advanced sensors
Combining ROS and AI for fail-operational automated driving
 Combining ROS and AI for fail-operational automated driving Prof. Dr. Daniel Watzenig Virtual Vehicle Research Center, Graz, Austria and Institute of Automation and Control at Graz University of Technology
Combining ROS and AI for fail-operational automated driving Prof. Dr. Daniel Watzenig Virtual Vehicle Research Center, Graz, Austria and Institute of Automation and Control at Graz University of Technology
Outline. Agents and environments Rationality PEAS (Performance measure, Environment, Actuators, Sensors) Environment types Agent types
 Environment types Agent types") Intelligent Agents Outline Agents and environments Rationality PEAS (Performance measure, Environment, Actuators, Sensors) Environment types Agent types Agents An agent is anything that can be viewed as
Intelligent Agents Outline Agents and environments Rationality PEAS (Performance measure, Environment, Actuators, Sensors) Environment types Agent types Agents An agent is anything that can be viewed as
Evaluation of Connected Vehicle Technology for Concept Proposal Using V2X Testbed
 AUTOMOTIVE Evaluation of Connected Vehicle Technology for Concept Proposal Using V2X Testbed Yoshiaki HAYASHI*, Izumi MEMEZAWA, Takuji KANTOU, Shingo OHASHI, and Koichi TAKAYAMA ----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------
AUTOMOTIVE Evaluation of Connected Vehicle Technology for Concept Proposal Using V2X Testbed Yoshiaki HAYASHI*, Izumi MEMEZAWA, Takuji KANTOU, Shingo OHASHI, and Koichi TAKAYAMA ----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------
Deliverable D1.6 Initial System Specifications Executive Summary
 Deliverable D1.6 Initial System Specifications Executive Summary Version 1.0 Dissemination Project Coordination RE Ford Research and Advanced Engineering Europe Due Date 31.10.2010 Version Date 09.02.2011
Deliverable D1.6 Initial System Specifications Executive Summary Version 1.0 Dissemination Project Coordination RE Ford Research and Advanced Engineering Europe Due Date 31.10.2010 Version Date 09.02.2011
Last Time: Acting Humanly: The Full Turing Test
 Last Time: Acting Humanly: The Full Turing Test Alan Turing's 1950 article Computing Machinery and Intelligence discussed conditions for considering a machine to be intelligent Can machines think? Can
Last Time: Acting Humanly: The Full Turing Test Alan Turing's 1950 article Computing Machinery and Intelligence discussed conditions for considering a machine to be intelligent Can machines think? Can
TRB Workshop on the Future of Road Vehicle Automation
 TRB Workshop on the Future of Road Vehicle Automation Steven E. Shladover University of California PATH Program ITFVHA Meeting, Vienna October 21, 2012 1 Outline TRB background Workshop organization Automation
TRB Workshop on the Future of Road Vehicle Automation Steven E. Shladover University of California PATH Program ITFVHA Meeting, Vienna October 21, 2012 1 Outline TRB background Workshop organization Automation
COVER STORY. how this new architecture will help carmakers master the complexity of autonomous driving.
 COVER STORY Semiconductors NXP ESTABLISHED AND NEW PLAYERS The era of self-driving cars places semiconductor companies at the center of important discussions about standards, methodologies, and design
COVER STORY Semiconductors NXP ESTABLISHED AND NEW PLAYERS The era of self-driving cars places semiconductor companies at the center of important discussions about standards, methodologies, and design
Intelligent Agents p.1/25. Intelligent Agents. Chapter 2
 Intelligent Agents p.1/25 Intelligent Agents Chapter 2 Intelligent Agents p.2/25 Outline Agents and environments Rationality PEAS (Performance measure, Environment, Actuators, Sensors) Environment types
Intelligent Agents p.1/25 Intelligent Agents Chapter 2 Intelligent Agents p.2/25 Outline Agents and environments Rationality PEAS (Performance measure, Environment, Actuators, Sensors) Environment types
Cooperative localization (part I) Jouni Rantakokko
 Jouni Rantakokko") Cooperative localization (part I) Jouni Rantakokko Cooperative applications / approaches Wireless sensor networks Robotics Pedestrian localization First responders Localization sensors - Small, low-cost
Cooperative localization (part I) Jouni Rantakokko Cooperative applications / approaches Wireless sensor networks Robotics Pedestrian localization First responders Localization sensors - Small, low-cost
Fusion in EU projects and the Perception Approach. Dr. Angelos Amditis interactive Summer School 4-6 July, 2012
 Fusion in EU projects and the Perception Approach Dr. Angelos Amditis interactive Summer School 4-6 July, 2012 Content Introduction Data fusion in european research projects EUCLIDE PReVENT-PF2 SAFESPOT
Fusion in EU projects and the Perception Approach Dr. Angelos Amditis interactive Summer School 4-6 July, 2012 Content Introduction Data fusion in european research projects EUCLIDE PReVENT-PF2 SAFESPOT
Choosing the Optimum Mix of Sensors for Driver Assistance and Autonomous Vehicles
 Choosing the Optimum Mix of Sensors for Driver Assistance and Autonomous Vehicles Ali Osman Ors May 2, 2017 Copyright 2017 NXP Semiconductors 1 Sensing Technology Comparison Rating: H = High, M=Medium,
Choosing the Optimum Mix of Sensors for Driver Assistance and Autonomous Vehicles Ali Osman Ors May 2, 2017 Copyright 2017 NXP Semiconductors 1 Sensing Technology Comparison Rating: H = High, M=Medium,
TECHNOLOGY DEVELOPMENT AREAS IN AAWA
 TECHNOLOGY DEVELOPMENT AREAS IN AAWA Technologies for realizing remote and autonomous ships exist. The task is to find the optimum way to combine them reliably and cost effecticely. Ship state definition
TECHNOLOGY DEVELOPMENT AREAS IN AAWA Technologies for realizing remote and autonomous ships exist. The task is to find the optimum way to combine them reliably and cost effecticely. Ship state definition
Method and Tools Specifications
 Method and Tools Deliverable n. D1.3.2 Method and Tools Sub Project SP1 Requirements and Workpackage WP1.2 Requirements Task n. T1.3.2 Method and Tools Authors N. Pallaro A. Ghiro CRF CRF File name Status
Method and Tools Deliverable n. D1.3.2 Method and Tools Sub Project SP1 Requirements and Workpackage WP1.2 Requirements Task n. T1.3.2 Method and Tools Authors N. Pallaro A. Ghiro CRF CRF File name Status
Safe, Efficient and Effective Testing of Connected and Autonomous Vehicles Paul Jennings. Franco-British Symposium on ITS 5 th October 2016
 Safe, Efficient and Effective Testing of Connected and Autonomous Vehicles Paul Jennings Franco-British Symposium on ITS 5 th October 2016 An academic department within the science faculty Established
Safe, Efficient and Effective Testing of Connected and Autonomous Vehicles Paul Jennings Franco-British Symposium on ITS 5 th October 2016 An academic department within the science faculty Established
Vehicle Hardware-In-the-Loop System for ADAS Virtual Testing
 11 Vehicle Hardware-In-the-Loop System for ADAS Virtual Testing Romain Rossi, Clément Galko, Hariharan Narasimman and Xavier Savatier Univ. Rouen, UNIROUEN, ESIGELEC, IRSEEM 76000 Rouen, France 11.1 Introduction
11 Vehicle Hardware-In-the-Loop System for ADAS Virtual Testing Romain Rossi, Clément Galko, Hariharan Narasimman and Xavier Savatier Univ. Rouen, UNIROUEN, ESIGELEC, IRSEEM 76000 Rouen, France 11.1 Introduction
CAPACITIES FOR TECHNOLOGY TRANSFER
 CAPACITIES FOR TECHNOLOGY TRANSFER The Institut de Robòtica i Informàtica Industrial (IRI) is a Joint University Research Institute of the Spanish Council for Scientific Research (CSIC) and the Technical
CAPACITIES FOR TECHNOLOGY TRANSFER The Institut de Robòtica i Informàtica Industrial (IRI) is a Joint University Research Institute of the Spanish Council for Scientific Research (CSIC) and the Technical
Intelligent driving TH« TNO I Innovation for live
 Intelligent driving TNO I Innovation for live TH«Intelligent Transport Systems have become an integral part of the world. In addition to the current ITS systems, intelligent vehicles can make a significant
Intelligent driving TNO I Innovation for live TH«Intelligent Transport Systems have become an integral part of the world. In addition to the current ITS systems, intelligent vehicles can make a significant
Vehicle-in-the-loop: Innovative Testing Method for Cognitive Vehicles
 Dr.-Ing. Thomas Schamm, M.Sc. Marc René Zofka, Dipl.-Inf. Tobias Bär Technical Cognitive Assistance Systems FZI Research Center for Information Technology FZI FORSCHUNGSZENTRUM INFORMATIK Vehicle-in-the-loop:
Dr.-Ing. Thomas Schamm, M.Sc. Marc René Zofka, Dipl.-Inf. Tobias Bär Technical Cognitive Assistance Systems FZI Research Center for Information Technology FZI FORSCHUNGSZENTRUM INFORMATIK Vehicle-in-the-loop:
A Winning Combination
 A Winning Combination Risk factors Statements in this presentation that refer to future plans and expectations are forward-looking statements that involve a number of risks and uncertainties. Words such
A Winning Combination Risk factors Statements in this presentation that refer to future plans and expectations are forward-looking statements that involve a number of risks and uncertainties. Words such
Positioning Challenges in Cooperative Vehicular Safety Systems
 Positioning Challenges in Cooperative Vehicular Safety Systems Dr. Luca Delgrossi Mercedes-Benz Research & Development North America, Inc. October 15, 2009 Positioning for Automotive Navigation Personal
Positioning Challenges in Cooperative Vehicular Safety Systems Dr. Luca Delgrossi Mercedes-Benz Research & Development North America, Inc. October 15, 2009 Positioning for Automotive Navigation Personal
Softing TDX ODX- and OTX-Based Diagnostic System Framework
 Softing TDX ODX- and OTX-Based Diagnostic System Framework DX (Open Diagnostic data exchange) and OTX (Open Test sequence exchange) standards are very well established description formats for diagnostics
Softing TDX ODX- and OTX-Based Diagnostic System Framework DX (Open Diagnostic data exchange) and OTX (Open Test sequence exchange) standards are very well established description formats for diagnostics
Robust Positioning for Urban Traffic
 Robust Positioning for Urban Traffic Motivations and Activity plan for the WG 4.1.4 Dr. Laura Ruotsalainen Research Manager, Department of Navigation and positioning Finnish Geospatial Research Institute
Robust Positioning for Urban Traffic Motivations and Activity plan for the WG 4.1.4 Dr. Laura Ruotsalainen Research Manager, Department of Navigation and positioning Finnish Geospatial Research Institute
Automotive Needs and Expectations towards Next Generation Driving Simulation
 Automotive Needs and Expectations towards Next Generation Driving Simulation Dr. Hans-Peter Schöner - Insight fromoutside -Consulting - Senior Automotive Expert, Driving Simulation Association September
Automotive Needs and Expectations towards Next Generation Driving Simulation Dr. Hans-Peter Schöner - Insight fromoutside -Consulting - Senior Automotive Expert, Driving Simulation Association September
Interaction in Urban Traffic Insights into an Observation of Pedestrian-Vehicle Encounters
 Interaction in Urban Traffic Insights into an Observation of Pedestrian-Vehicle Encounters André Dietrich, Chair of Ergonomics, TUM andre.dietrich@tum.de CARTRE and SCOUT are funded by Monday, May the
Interaction in Urban Traffic Insights into an Observation of Pedestrian-Vehicle Encounters André Dietrich, Chair of Ergonomics, TUM andre.dietrich@tum.de CARTRE and SCOUT are funded by Monday, May the
In-Vehicle Emergency Call Systems: From National Deployment to International Harmonization. Evgeni Meilikhov, PhD
 In-Vehicle Emergency Call Systems: From National Deployment to International Harmonization Evgeni Meilikhov, PhD 05 March, 2015 May 2010 Start of ERA-GLONASS project (Government Contract signed) January
In-Vehicle Emergency Call Systems: From National Deployment to International Harmonization Evgeni Meilikhov, PhD 05 March, 2015 May 2010 Start of ERA-GLONASS project (Government Contract signed) January
Autonomous Vehicle Simulation (MDAS.ai)
") Autonomous Vehicle Simulation (MDAS.ai) Sridhar Lakshmanan Department of Electrical & Computer Engineering University of Michigan - Dearborn Presentation for Physical Systems Replication Panel NDIA Cyber-Enabled
Autonomous Vehicle Simulation (MDAS.ai) Sridhar Lakshmanan Department of Electrical & Computer Engineering University of Michigan - Dearborn Presentation for Physical Systems Replication Panel NDIA Cyber-Enabled
NAV CAR Lane-sensitive positioning and navigation for innovative ITS services AMAA, May 31 st, 2012 E. Schoitsch, E. Althammer, R.
 NAV CAR Lane-sensitive positioning and navigation for innovative ITS services AMAA, May 31 st, 2012 E. Schoitsch, E. Althammer, R. Kloibhofer (AIT), R. Spielhofer, M. Reinthaler, P. Nitsche (ÖFPZ), H.
NAV CAR Lane-sensitive positioning and navigation for innovative ITS services AMAA, May 31 st, 2012 E. Schoitsch, E. Althammer, R. Kloibhofer (AIT), R. Spielhofer, M. Reinthaler, P. Nitsche (ÖFPZ), H.
Control System for an All-Terrain Mobile Robot
 Solid State Phenomena Vols. 147-149 (2009) pp 43-48 Online: 2009-01-06 (2009) Trans Tech Publications, Switzerland doi:10.4028/www.scientific.net/ssp.147-149.43 Control System for an All-Terrain Mobile
Solid State Phenomena Vols. 147-149 (2009) pp 43-48 Online: 2009-01-06 (2009) Trans Tech Publications, Switzerland doi:10.4028/www.scientific.net/ssp.147-149.43 Control System for an All-Terrain Mobile
Assessments of Grade Crossing Warning and Signalization Devices Driving Simulator Study
 Assessments of Grade Crossing Warning and Signalization Devices Driving Simulator Study Petr Bouchner, Stanislav Novotný, Roman Piekník, Ondřej Sýkora Abstract Behavior of road users on railway crossings
Assessments of Grade Crossing Warning and Signalization Devices Driving Simulator Study Petr Bouchner, Stanislav Novotný, Roman Piekník, Ondřej Sýkora Abstract Behavior of road users on railway crossings
Transponder Based Ranging
 Transponder Based Ranging Transponderbasierte Abstandsmessung Gerrit Kalverkamp, Bernhard Schaffer Technische Universität München Outline Secondary radar principle Looking around corners: Diffraction of
Transponder Based Ranging Transponderbasierte Abstandsmessung Gerrit Kalverkamp, Bernhard Schaffer Technische Universität München Outline Secondary radar principle Looking around corners: Diffraction of
A SERVICE-ORIENTED SYSTEM ARCHITECTURE FOR THE HUMAN CENTERED DESIGN OF INTELLIGENT TRANSPORTATION SYSTEMS
 Tools and methodologies for ITS design and drivers awareness A SERVICE-ORIENTED SYSTEM ARCHITECTURE FOR THE HUMAN CENTERED DESIGN OF INTELLIGENT TRANSPORTATION SYSTEMS Jan Gačnik, Oliver Häger, Marco Hannibal
Tools and methodologies for ITS design and drivers awareness A SERVICE-ORIENTED SYSTEM ARCHITECTURE FOR THE HUMAN CENTERED DESIGN OF INTELLIGENT TRANSPORTATION SYSTEMS Jan Gačnik, Oliver Häger, Marco Hannibal
Agent. Pengju Ren. Institute of Artificial Intelligence and Robotics
 Agent Pengju Ren Institute of Artificial Intelligence and Robotics pengjuren@xjtu.edu.cn 1 Review: What is AI? Artificial intelligence (AI) is intelligence exhibited by machines. In computer science, the
Agent Pengju Ren Institute of Artificial Intelligence and Robotics pengjuren@xjtu.edu.cn 1 Review: What is AI? Artificial intelligence (AI) is intelligence exhibited by machines. In computer science, the
Plan for the 2nd hour. What is AI. Acting humanly: The Turing test. EDAF70: Applied Artificial Intelligence Agents (Chapter 2 of AIMA)
") Plan for the 2nd hour EDAF70: Applied Artificial Intelligence (Chapter 2 of AIMA) Jacek Malec Dept. of Computer Science, Lund University, Sweden January 17th, 2018 What is an agent? PEAS (Performance measure,
Plan for the 2nd hour EDAF70: Applied Artificial Intelligence (Chapter 2 of AIMA) Jacek Malec Dept. of Computer Science, Lund University, Sweden January 17th, 2018 What is an agent? PEAS (Performance measure,
Séminaire Voiture Autonome: Technologies, Enjeux et Applications February , Paris (France) Asprom UIMM Cap Tronic
 Asprom UIMM Cap Tronic") Embedded Perception & Risk Assessment for next Cars Generation Christian LAUGIER, Research Director at Inria Chroma Team & IRT Nanolec Christian.laugier@inria.fr Contributions from Mathias Perrollaz, Christopher
Embedded Perception & Risk Assessment for next Cars Generation Christian LAUGIER, Research Director at Inria Chroma Team & IRT Nanolec Christian.laugier@inria.fr Contributions from Mathias Perrollaz, Christopher
ITS radiocommunications toward automated driving systems in Japan
 Session 1: ITS radiocommunications toward automated driving systems in Japan 25 March 2015 Helmond, the Netherland Takahiro Ueno Deputy Director, New-Generation Mobile Communications Office, Radio Dept.,
Session 1: ITS radiocommunications toward automated driving systems in Japan 25 March 2015 Helmond, the Netherland Takahiro Ueno Deputy Director, New-Generation Mobile Communications Office, Radio Dept.,
CS686: High-level Motion/Path Planning Applications
 CS686: High-level Motion/Path Planning Applications Sung-Eui Yoon ( 윤성의 ) Course URL: http://sglab.kaist.ac.kr/~sungeui/mpa Class Objectives Discuss my general research view on motion planning Discuss
CS686: High-level Motion/Path Planning Applications Sung-Eui Yoon ( 윤성의 ) Course URL: http://sglab.kaist.ac.kr/~sungeui/mpa Class Objectives Discuss my general research view on motion planning Discuss
How to build an autonomous anything
 How to build an autonomous anything Jim Tung jim@mathworks.com 2015 The MathWorks, Inc. 1 2 3 4 5 6 7 Autonomous Technology 8 Autonomy Having the power for self-governance 9 Autonomous Technology Provides
How to build an autonomous anything Jim Tung jim@mathworks.com 2015 The MathWorks, Inc. 1 2 3 4 5 6 7 Autonomous Technology 8 Autonomy Having the power for self-governance 9 Autonomous Technology Provides
Newsletter No. 2 (July 2017)
") Enhancing intelligent urban road transport network and cooperative systems for highly automated vehicles Newsletter No. 2 (July 2017) Introduction MAVEN (Managing Automated Vehicles Enhances Network) was
Enhancing intelligent urban road transport network and cooperative systems for highly automated vehicles Newsletter No. 2 (July 2017) Introduction MAVEN (Managing Automated Vehicles Enhances Network) was
Industrial Keynotes. 06/09/2018 Juan-Les-Pins
 Industrial Keynotes 1 06/09/2018 Juan-Les-Pins Agenda 1. The End of Driving Simulation? 2. Autonomous Vehicles: the new UI 3. Augmented Realities 4. Choose your factions 5. No genuine AI without flawless
Industrial Keynotes 1 06/09/2018 Juan-Les-Pins Agenda 1. The End of Driving Simulation? 2. Autonomous Vehicles: the new UI 3. Augmented Realities 4. Choose your factions 5. No genuine AI without flawless
Early Take-Over Preparation in Stereoscopic 3D
 Adjunct Proceedings of the 10th International ACM Conference on Automotive User Interfaces and Interactive Vehicular Applications (AutomotiveUI 18), September 23 25, 2018, Toronto, Canada. Early Take-Over
Adjunct Proceedings of the 10th International ACM Conference on Automotive User Interfaces and Interactive Vehicular Applications (AutomotiveUI 18), September 23 25, 2018, Toronto, Canada. Early Take-Over
DENSO
 DENSO www.densocorp-na.com Collaborative Automated Driving Description of Project DENSO is one of the biggest tier one suppliers in the automotive industry, and one of its main goals is to provide solutions
DENSO www.densocorp-na.com Collaborative Automated Driving Description of Project DENSO is one of the biggest tier one suppliers in the automotive industry, and one of its main goals is to provide solutions
Peripheral Sensor Interface for Automotive Applications
 I for Automotive Applications Substandard Chassis and Safety 121005_psi5_spec_v2d1_Chassis_and_Safety.doc 04.10.2012 II Contents 1 Introduction 1 2 Recommended Operation Modes 2 3 Sensor to ECU communication
I for Automotive Applications Substandard Chassis and Safety 121005_psi5_spec_v2d1_Chassis_and_Safety.doc 04.10.2012 II Contents 1 Introduction 1 2 Recommended Operation Modes 2 3 Sensor to ECU communication
Video Injection Methods in a Real-world Vehicle for Increasing Test Efficiency
 DEVELOPMENT SIMUL ATION AND TESTING Video Injection Methods in a Real-world Vehicle for Increasing Test Efficiency IPG Automotive AUTHORS For the testing of camera-based driver assistance systems under
DEVELOPMENT SIMUL ATION AND TESTING Video Injection Methods in a Real-world Vehicle for Increasing Test Efficiency IPG Automotive AUTHORS For the testing of camera-based driver assistance systems under
FAIL OPERATIONAL E/E SYSTEM CONCEPT FOR FUTURE APPLICATION IN ADAS AND AUTONOMOUS DRIVING
 FAIL OPERATIONAL E/E SYSTEM CONCEPT FOR FUTURE APPLICATION IN ADAS AND AUTONOMOUS DRIVING Fail Safe Fail Operational Fault Tolerance ISO 26262 Hermann Kränzle, TÜV NORD Systems OUR FUNCTIONAL SAFETY CERTIFIED
FAIL OPERATIONAL E/E SYSTEM CONCEPT FOR FUTURE APPLICATION IN ADAS AND AUTONOMOUS DRIVING Fail Safe Fail Operational Fault Tolerance ISO 26262 Hermann Kränzle, TÜV NORD Systems OUR FUNCTIONAL SAFETY CERTIFIED
NCS Lecture 2 Case Study - Alice. Alice Overview
 NCS Lecture 2 Case Study - Alice Richard M. Murray 17 March 2008 Goals: Provide detailed overview of a a model networked control system Introduce NCS features to be addressed in upcoming lectures Reading:
NCS Lecture 2 Case Study - Alice Richard M. Murray 17 March 2008 Goals: Provide detailed overview of a a model networked control system Introduce NCS features to be addressed in upcoming lectures Reading:
Automated Testing of Autonomous Driving Assistance Systems
 Automated Testing of Autonomous Driving Assistance Systems Lionel Briand Vector Testing Symposium, Stuttgart, 2018 SnT Centre Top level research in Information & Communication Technologies Created to fuel
Automated Testing of Autonomous Driving Assistance Systems Lionel Briand Vector Testing Symposium, Stuttgart, 2018 SnT Centre Top level research in Information & Communication Technologies Created to fuel
Vehicle-to-X communication using millimeter waves
 Infrastructure Person Vehicle 5G Slides Robert W. Heath Jr. (2016) Vehicle-to-X communication using millimeter waves Professor Robert W. Heath Jr., PhD, PE mmwave Wireless Networking and Communications
Infrastructure Person Vehicle 5G Slides Robert W. Heath Jr. (2016) Vehicle-to-X communication using millimeter waves Professor Robert W. Heath Jr., PhD, PE mmwave Wireless Networking and Communications
Autonomy, how much human in the loop? Architecting systems for complex contexts
 Architecting systems for complex contexts by Gerrit Muller University College of South East Norway e-mail: gaudisite@gmail.com www.gaudisite.nl Abstract The move from today s automotive archictectures
Architecting systems for complex contexts by Gerrit Muller University College of South East Norway e-mail: gaudisite@gmail.com www.gaudisite.nl Abstract The move from today s automotive archictectures
Autonomous Automation: How do we get to a Million Miles of testing?
 Autonomous Automation: How do we get to a Million Miles of testing? Jace Allen Business Development Manager Simulation, Test, and EEDM dspace Inc. 50131 Pontiac Trail Wixom, MI 48393 USA 1 Agenda 1. Intro
Autonomous Automation: How do we get to a Million Miles of testing? Jace Allen Business Development Manager Simulation, Test, and EEDM dspace Inc. 50131 Pontiac Trail Wixom, MI 48393 USA 1 Agenda 1. Intro
Peripheral Sensor Interface for Automotive Applications
 for Automotive Applications Technical 01/2018 I Contents 1 Introduction 1 2 Definition of Terms 2 3 Data Link Layer 3 3.1 Sensor to ECU Communication... 3 3.2 ECU to Sensor Communication... 4 4 Physical
for Automotive Applications Technical 01/2018 I Contents 1 Introduction 1 2 Definition of Terms 2 3 Data Link Layer 3 3.1 Sensor to ECU Communication... 3 3.2 ECU to Sensor Communication... 4 4 Physical
HIGHTS: towards sub-meter positioning accuracy in vehicular networks. Jérôme Härri (EURECOM) on Behalf of HIGHTS ETSI ITS Workshop March 6-8, 2018
 on Behalf of HIGHTS ETSI ITS Workshop March 6-8, 2018") HIGHTS: towards sub-meter positioning accuracy in vehicular networks Jérôme Härri (EURECOM) on Behalf of HIGHTS ETSI ITS Workshop March 6-8, 2018 The HIGHTS Consortium 09.03.2018 H2020 HIGHTS Project 2
HIGHTS: towards sub-meter positioning accuracy in vehicular networks Jérôme Härri (EURECOM) on Behalf of HIGHTS ETSI ITS Workshop March 6-8, 2018 The HIGHTS Consortium 09.03.2018 H2020 HIGHTS Project 2
Robo$cs Introduc$on. ROS Workshop. Faculty of Informa$on Technology, Brno University of Technology Bozetechova 2, Brno
 Robo$cs Introduc$on ROS Workshop Faculty of Informa$on Technology, Brno University of Technology Bozetechova 2, 612 66 Brno name@fit.vutbr.cz What is a Robot? a programmable, mul.func.on manipulator USA
Robo$cs Introduc$on ROS Workshop Faculty of Informa$on Technology, Brno University of Technology Bozetechova 2, 612 66 Brno name@fit.vutbr.cz What is a Robot? a programmable, mul.func.on manipulator USA
Honda R&D Americas, Inc.
 Honda R&D Americas, Inc. Topics Honda s view on ITS and V2X Activity Honda-lead V2I Message Set Development Status Challenges Topics Honda s view on ITS and V2X Activity Honda-lead V2I Message Set Standard
Honda R&D Americas, Inc. Topics Honda s view on ITS and V2X Activity Honda-lead V2I Message Set Development Status Challenges Topics Honda s view on ITS and V2X Activity Honda-lead V2I Message Set Standard
Model Deployment Overview. Debby Bezzina Senior Program Manager University of Michigan Transportation Research Institute
 Model Deployment Overview Debby Bezzina Senior Program Manager University of Michigan Transportation Research Institute Test Conductor Team 2 3 Connected Vehicle Technology 4 Safety Pilot Model Deployment
Model Deployment Overview Debby Bezzina Senior Program Manager University of Michigan Transportation Research Institute Test Conductor Team 2 3 Connected Vehicle Technology 4 Safety Pilot Model Deployment
Smart Space - An Indoor Positioning Framework
 Smart Space - An Indoor Positioning Framework Droidcon 09 Berlin, 4.11.2009 Stephan Linzner, Daniel Kersting, Dr. Christian Hoene Universität Tübingen Research Group on Interactive Communication Systems
Smart Space - An Indoor Positioning Framework Droidcon 09 Berlin, 4.11.2009 Stephan Linzner, Daniel Kersting, Dr. Christian Hoene Universität Tübingen Research Group on Interactive Communication Systems
TEM/HEEP Area V 2011 Annual Meeting
 TEM/HEEP Area V 2011 Annual Meeting Alexandr GROF Ministry of Transport Czech Republic Suceava 14-15 June 2011 Map of Europe Czech Republic Road and Motorway network Area: 78 866 km 2 Population: 10.220
TEM/HEEP Area V 2011 Annual Meeting Alexandr GROF Ministry of Transport Czech Republic Suceava 14-15 June 2011 Map of Europe Czech Republic Road and Motorway network Area: 78 866 km 2 Population: 10.220
ADAS COMPUTER VISION AND AUGMENTED REALITY SOLUTION
 ENGINEERING ENERGY TELECOM TRAVEL AND AVIATION SOFTWARE FINANCIAL SERVICES ADAS COMPUTER VISION AND AUGMENTED REALITY SOLUTION Sergii Bykov, Technical Lead TECHNOLOGY AUTOMOTIVE Product Vision Road To
ENGINEERING ENERGY TELECOM TRAVEL AND AVIATION SOFTWARE FINANCIAL SERVICES ADAS COMPUTER VISION AND AUGMENTED REALITY SOLUTION Sergii Bykov, Technical Lead TECHNOLOGY AUTOMOTIVE Product Vision Road To
Driver Assistance Systems (DAS)
") Driver Assistance Systems (DAS) Short Overview László Czúni University of Pannonia What is DAS? DAS: electronic systems helping the driving of a vehicle ADAS (advanced DAS): the collection of systems and
Driver Assistance Systems (DAS) Short Overview László Czúni University of Pannonia What is DAS? DAS: electronic systems helping the driving of a vehicle ADAS (advanced DAS): the collection of systems and
Autonomous driving made safe
 tm Autonomous driving made safe Founder, Bio Celite Milbrandt Austin, Texas since 1998 Founder of Slacker Radio In dash for Tesla, GM, and Ford. 35M active users 2008 Chief Product Officer of RideScout
tm Autonomous driving made safe Founder, Bio Celite Milbrandt Austin, Texas since 1998 Founder of Slacker Radio In dash for Tesla, GM, and Ford. 35M active users 2008 Chief Product Officer of RideScout
WHITE PAPER Saving Lives with Intelligent In-Vehicle Systems
 WHITE PAPER Saving Lives with Intelligent In-Vehicle Systems For more information, please visit: 2012 IEIMobile Approximately 1.2 million people die from traffic injuries and accidents each year. It has
WHITE PAPER Saving Lives with Intelligent In-Vehicle Systems For more information, please visit: 2012 IEIMobile Approximately 1.2 million people die from traffic injuries and accidents each year. It has
ITS Radiocommunications in Japan Progress report and future directions
 ITS Radiocommunications in Japan Progress report and future directions 6 March 2018 Berlin, Germany Tomoaki Ishii Assistant Director, New-Generation Mobile Communications Office, Radio Dept., Telecommunications
ITS Radiocommunications in Japan Progress report and future directions 6 March 2018 Berlin, Germany Tomoaki Ishii Assistant Director, New-Generation Mobile Communications Office, Radio Dept., Telecommunications
STAGES-IBM RTC INTERFACE IN PRACTICE MICHAEL NERKAMP ROBERT BOSCH GMBH STAGES INSIGHTS, MARCH 14 TH 2018
 STAGES-IBM RTC INTERFACE IN PRACTICE MICHAEL NERKAMP ROBERT BOSCH GMBH STAGES INSIGHTS, MARCH 14 TH 2018 Michael Nerkamp Member of Engineering Process Group in Chassis Systems Control (CC) Development
STAGES-IBM RTC INTERFACE IN PRACTICE MICHAEL NERKAMP ROBERT BOSCH GMBH STAGES INSIGHTS, MARCH 14 TH 2018 Michael Nerkamp Member of Engineering Process Group in Chassis Systems Control (CC) Development
Cruden Panthera simulator software suite
 Cruden simulator software suite Automotive OEM departments and first tier companies, motorsport teams, universities and research institutes use Cruden simulators to significantly reduce the cost and time
Cruden simulator software suite Automotive OEM departments and first tier companies, motorsport teams, universities and research institutes use Cruden simulators to significantly reduce the cost and time
ETICA E GOVERNANCE DELL INTELLIGENZA ARTIFICIALE
 Conferenza NEXA su Internet e Società, 18 Dicembre 2017 ETICA E GOVERNANCE DELL INTELLIGENZA ARTIFICIALE Etica e Smart Cities Le nuove frontiere dell Intelligenza Artificiale per la città del futuro Giuseppe
Conferenza NEXA su Internet e Società, 18 Dicembre 2017 ETICA E GOVERNANCE DELL INTELLIGENZA ARTIFICIALE Etica e Smart Cities Le nuove frontiere dell Intelligenza Artificiale per la città del futuro Giuseppe
Qosmotec. Software Solutions GmbH. Technical Overview. QPER C2X - Car-to-X Signal Strength Emulator and HiL Test Bench. Page 1
 Qosmotec Software Solutions GmbH Technical Overview QPER C2X - Page 1 TABLE OF CONTENTS 0 DOCUMENT CONTROL...3 0.1 Imprint...3 0.2 Document Description...3 1 SYSTEM DESCRIPTION...4 1.1 General Concept...4
Qosmotec Software Solutions GmbH Technical Overview QPER C2X - Page 1 TABLE OF CONTENTS 0 DOCUMENT CONTROL...3 0.1 Imprint...3 0.2 Document Description...3 1 SYSTEM DESCRIPTION...4 1.1 General Concept...4
MEM380 Applied Autonomous Robots I Winter Feedback Control USARSim
 MEM380 Applied Autonomous Robots I Winter 2011 Feedback Control USARSim Transforming Accelerations into Position Estimates In a perfect world It s not a perfect world. We have noise and bias in our acceleration
MEM380 Applied Autonomous Robots I Winter 2011 Feedback Control USARSim Transforming Accelerations into Position Estimates In a perfect world It s not a perfect world. We have noise and bias in our acceleration
Invited talk IET-Renault Workshop Autonomous Vehicles: From theory to full scale applications Novotel Paris Les Halles, June 18 th 2015
 Risk assessment & Decision-making for safe Vehicle Navigation under Uncertainty Christian LAUGIER, First class Research Director at Inria http://emotion.inrialpes.fr/laugier Contributions from Mathias
Risk assessment & Decision-making for safe Vehicle Navigation under Uncertainty Christian LAUGIER, First class Research Director at Inria http://emotion.inrialpes.fr/laugier Contributions from Mathias
ADAS/AD Challenge. Copyright 2017, dspace GmbH
 ADAS/AD Challenge 2 dspace Automotive Simulation Models (ASM) for ADAS and AD Michael Peperhowe, Group Manager ASM VD & Traffic dspace GmbH Rathenaustr. 26 33102 Paderborn Germany 3 ASM Overview 4 ASM
ADAS/AD Challenge 2 dspace Automotive Simulation Models (ASM) for ADAS and AD Michael Peperhowe, Group Manager ASM VD & Traffic dspace GmbH Rathenaustr. 26 33102 Paderborn Germany 3 ASM Overview 4 ASM
A flexible application framework for distributed real time systems with applications in PC based driving simulators
 A flexible application framework for distributed real time systems with applications in PC based driving simulators M. Grein, A. Kaussner, H.-P. Krüger, H. Noltemeier Abstract For the research at the IZVW
A flexible application framework for distributed real time systems with applications in PC based driving simulators M. Grein, A. Kaussner, H.-P. Krüger, H. Noltemeier Abstract For the research at the IZVW
Development of Gaze Detection Technology toward Driver's State Estimation
 Development of Gaze Detection Technology toward Driver's State Estimation Naoyuki OKADA Akira SUGIE Itsuki HAMAUE Minoru FUJIOKA Susumu YAMAMOTO Abstract In recent years, the development of advanced safety
Development of Gaze Detection Technology toward Driver's State Estimation Naoyuki OKADA Akira SUGIE Itsuki HAMAUE Minoru FUJIOKA Susumu YAMAMOTO Abstract In recent years, the development of advanced safety
DESIGN AND CAPABILITIES OF AN ENHANCED NAVAL MINE WARFARE SIMULATION FRAMEWORK. Timothy E. Floore George H. Gilman
 Proceedings of the 2011 Winter Simulation Conference S. Jain, R.R. Creasey, J. Himmelspach, K.P. White, and M. Fu, eds. DESIGN AND CAPABILITIES OF AN ENHANCED NAVAL MINE WARFARE SIMULATION FRAMEWORK Timothy
Proceedings of the 2011 Winter Simulation Conference S. Jain, R.R. Creasey, J. Himmelspach, K.P. White, and M. Fu, eds. DESIGN AND CAPABILITIES OF AN ENHANCED NAVAL MINE WARFARE SIMULATION FRAMEWORK Timothy
High-Fidelity Modeling and Simulation of Ground Robots at ERDC Chris Goodin, Ph.D.
 High-Fidelity Modeling and Simulation of Ground Robots at ERDC Chris Goodin, Ph.D. Research Physicist U.S. Army Engineer Research and Development Center Geotechnical and Structures Laboratory 21 June 2016
High-Fidelity Modeling and Simulation of Ground Robots at ERDC Chris Goodin, Ph.D. Research Physicist U.S. Army Engineer Research and Development Center Geotechnical and Structures Laboratory 21 June 2016