Intelligent Driving Agents
|
|
|
- Kevin Lane
- 5 years ago
- Views:
Transcription
1 Intelligent Driving Agents The agent approach to tactical driving in autonomous vehicles and traffic simulation Presentation Master s thesis Patrick Ehlert January 29 th, 2001
2 Imagine. Sensors Actuators Intelligence 1
3 Overview of presentation Project and theory Design Simulation Conclusions and recommendations Short demonstration 2
4 Project Study the use of intelligent agents controlling a vehicle in an urban environment Two cases: 1. Real life vehicles 2. Simulated vehicles Focus on tactical-level level driving 3
5 Theory: tactical driving Driving task separated in three levels: strategic long-term decisions, determine goals tactical short-term term decisions, current situation operational actual performed actions 4
6 Theory: what are agents? Definition: : autonomous computerized entity capable of sensing its environment and acting intelligently based on its perception. smart creature inside computer Ability to perform a given task Autonomous Adaptive / capable of learning 5
7 Design: driving agent Perform tactical driving Real time control Safety Expandibility 6
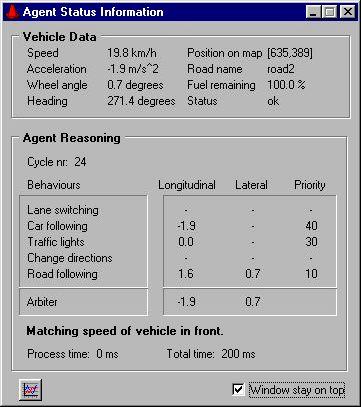
8 Design: driving agent (continued) Sensors Communication Vehicle Environment Parameters Controller & Memory Arbiter Behavioural rules Car Overtaking following Traffic Behavioural rules lights Road Collision following avoidance Supervisor / other agents 7
9 Implementation: : simulator Decided to create new prototype traffic simulation program Used Borland Delphi 5 language Suitable for fast prototyping Experience 8
10 Implementation: simulator Simulation controller Environment Timer 1: update Vehicles User interface Traffic lights Roads Picture of environment 2: visual feedback Traffic light controllers Simulated objects Intersections 9
11 Implementation: agent Environment b: send orders Agents Reasoning c: sleep Vehicles Sensors Traffic lights Roads Traffic light controllers Intersections a: get information Simulated objects 10
12 Implementation: rules Implemented and tested one-by by-one Behaviour rules are directly coded into the program example: If (agent speed < preferred speed) then Accelerate (normal) 11
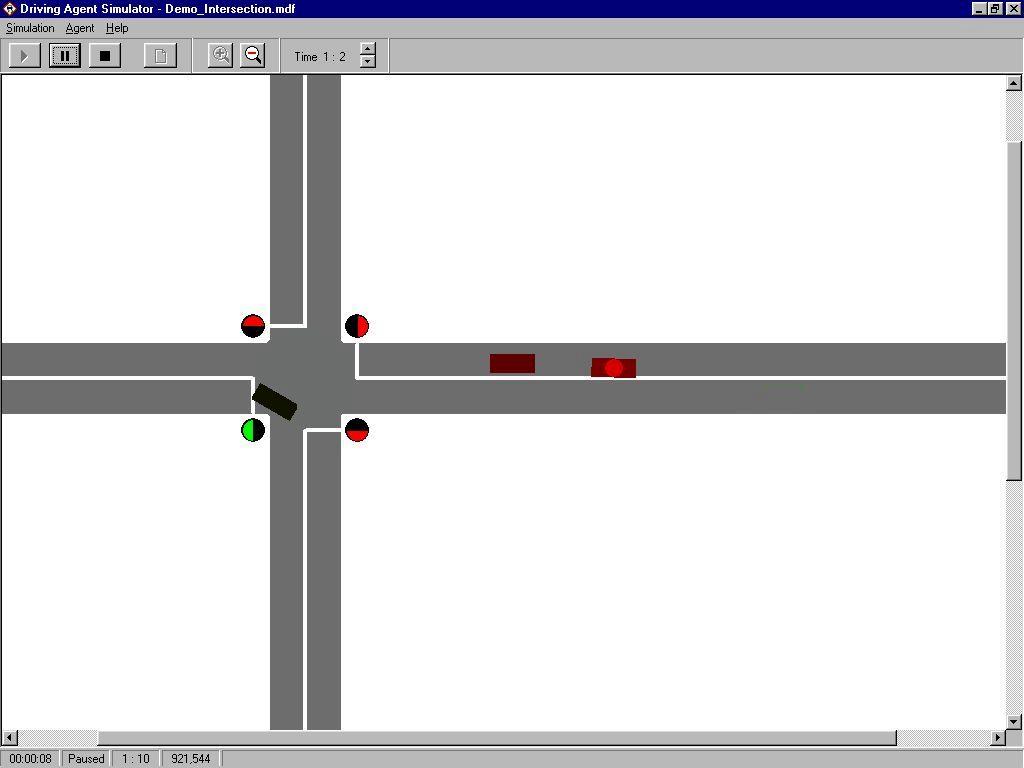
13 Implementation: example 12
14 Conclusions Designed driving agent can control vehicles Advantages agent-based simulation increased realism flexible distributed processing possible Disadvantages increase computational load many parameters 13
15 Recommendations / Future work Improve simulator and agent Use distributed approach Use agent to control real vehicles? 14
16 Demonstration 15
17 **** End of presentation ****
18 Theory: sense-plan plan-actact Traditional model, popular in 70 s and 80 s Sensors Perception World modeling Planning Task execution Actuators 17
19 Theory: subsumption Rodney Brooks, MIT 1986 Build maps Sensors Explore Wander Avoid objects Actuators 18
20 Design: behaviour rules 19 Specialised and fast procedures that propose an action Any method may be used within constraints Use behavioural parameters preferred speed acceleration & deceleration rate gap acceptance reaction time sensor range (visibility)
21 Implementation: agent Agent execution loop 1. Get input from sensors 2. Send input to memory 3. Determine action proposals 4. Arbiter selects best proposal 5. Send proposal to vehicle 6. Sleep until next loop 20
22 Implementation: rules (continued) Example Road Following Action proposal Drive at preferred speed Stay in lane Adjust speed for curve Brake for end of road 21
23 Example.MDF file DESCRIPTION="Demo scenario - Intersection" SCALE=40 MAPWIDTH=300 MAPHEIGHT=300 ROAD (road1, [000,100], [100,100], 350, 350,1,1) ROAD (road2, [100,100], [300,100], 350, 350,1,1) ROAD (road3, [100,100], [100,000], 350, 350,1,1) ROAD (road4, [100,100], [100,300], 350, 350,1,1) TRAFFICLIGHT (light1, [087,113], road1, 1, right) TRAFFICLIGHT (light3, [113,087], road2, 1, left) TRAFFICLIGHT (light4, [087,087], road3, 1, left) TRAFFICLIGHT (light2, [113,113], road4, 1, left) LIGHTCONTROLLER (lc1, 5000, light1, light2, light3, light4) 22

24 Experiments Low preferred speed Large gap acceptance Low deceleration rate High preferred speed Small gap acceptance High deceleration rate 23




25 Experiments (continued) 24
Microscopic traffic simulation with reactive driving agents
 2001 IEEE Intelligent Transportation Systems Conference Proceedings - Oakland (CA) USA = August 25-29, 2001 Microscopic traffic simulation with reactive driving agents Patrick A.M.Ehlert and Leon J.M.Rothkrantz,
2001 IEEE Intelligent Transportation Systems Conference Proceedings - Oakland (CA) USA = August 25-29, 2001 Microscopic traffic simulation with reactive driving agents Patrick A.M.Ehlert and Leon J.M.Rothkrantz,
A REACTIVE DRIVING AGENT FOR MICROSCOPIC TRAFFIC SIMULATION
 A REACTIVE DRIVING AGENT FOR MICROSCOPIC TRAFFIC SIMULATION Patrick A.M. Ehlert and Leon J.M. Rothkrantz Knowledge Based Systems Group Department of Information Technology and Systems Delft University
A REACTIVE DRIVING AGENT FOR MICROSCOPIC TRAFFIC SIMULATION Patrick A.M. Ehlert and Leon J.M. Rothkrantz Knowledge Based Systems Group Department of Information Technology and Systems Delft University
Autonomous Automobile Behavior through Context-based Reasoning
 From: FLAIR-00 Proceedings. Copyright 000, AAAI (www.aaai.org). All rights reserved. Autonomous Automobile Behavior through Context-based Reasoning Fernando G. Gonzalez Orlando, Florida 86 UA (407)8-987
From: FLAIR-00 Proceedings. Copyright 000, AAAI (www.aaai.org). All rights reserved. Autonomous Automobile Behavior through Context-based Reasoning Fernando G. Gonzalez Orlando, Florida 86 UA (407)8-987
Behaviour-Based Control. IAR Lecture 5 Barbara Webb
 Behaviour-Based Control IAR Lecture 5 Barbara Webb Traditional sense-plan-act approach suggests a vertical (serial) task decomposition Sensors Actuators perception modelling planning task execution motor
Behaviour-Based Control IAR Lecture 5 Barbara Webb Traditional sense-plan-act approach suggests a vertical (serial) task decomposition Sensors Actuators perception modelling planning task execution motor
Supporting the Design of Self- Organizing Ambient Intelligent Systems Through Agent-Based Simulation
 Supporting the Design of Self- Organizing Ambient Intelligent Systems Through Agent-Based Simulation Stefania Bandini, Andrea Bonomi, Giuseppe Vizzari Complex Systems and Artificial Intelligence research
Supporting the Design of Self- Organizing Ambient Intelligent Systems Through Agent-Based Simulation Stefania Bandini, Andrea Bonomi, Giuseppe Vizzari Complex Systems and Artificial Intelligence research
Outline. Agents and environments Rationality PEAS (Performance measure, Environment, Actuators, Sensors) Environment types Agent types
 Environment types Agent types") Intelligent Agents Outline Agents and environments Rationality PEAS (Performance measure, Environment, Actuators, Sensors) Environment types Agent types Agents An agent is anything that can be viewed as
Intelligent Agents Outline Agents and environments Rationality PEAS (Performance measure, Environment, Actuators, Sensors) Environment types Agent types Agents An agent is anything that can be viewed as
Plan for the 2nd hour. What is AI. Acting humanly: The Turing test. EDAF70: Applied Artificial Intelligence Agents (Chapter 2 of AIMA)
") Plan for the 2nd hour EDAF70: Applied Artificial Intelligence (Chapter 2 of AIMA) Jacek Malec Dept. of Computer Science, Lund University, Sweden January 17th, 2018 What is an agent? PEAS (Performance measure,
Plan for the 2nd hour EDAF70: Applied Artificial Intelligence (Chapter 2 of AIMA) Jacek Malec Dept. of Computer Science, Lund University, Sweden January 17th, 2018 What is an agent? PEAS (Performance measure,
Control Arbitration. Oct 12, 2005 RSS II Una-May O Reilly
 Control Arbitration Oct 12, 2005 RSS II Una-May O Reilly Agenda I. Subsumption Architecture as an example of a behavior-based architecture. Focus in terms of how control is arbitrated II. Arbiters and
Control Arbitration Oct 12, 2005 RSS II Una-May O Reilly Agenda I. Subsumption Architecture as an example of a behavior-based architecture. Focus in terms of how control is arbitrated II. Arbiters and
Deployment and Testing of Optimized Autonomous and Connected Vehicle Trajectories at a Closed- Course Signalized Intersection
 Deployment and Testing of Optimized Autonomous and Connected Vehicle Trajectories at a Closed- Course Signalized Intersection Clark Letter*, Lily Elefteriadou, Mahmoud Pourmehrab, Aschkan Omidvar Civil
Deployment and Testing of Optimized Autonomous and Connected Vehicle Trajectories at a Closed- Course Signalized Intersection Clark Letter*, Lily Elefteriadou, Mahmoud Pourmehrab, Aschkan Omidvar Civil
ADAS Development using Advanced Real-Time All-in-the-Loop Simulators. Roberto De Vecchi VI-grade Enrico Busto - AddFor
 ADAS Development using Advanced Real-Time All-in-the-Loop Simulators Roberto De Vecchi VI-grade Enrico Busto - AddFor The Scenario The introduction of ADAS and AV has created completely new challenges
ADAS Development using Advanced Real-Time All-in-the-Loop Simulators Roberto De Vecchi VI-grade Enrico Busto - AddFor The Scenario The introduction of ADAS and AV has created completely new challenges
Robots in Town Autonomous Challenge. Overview. Challenge. Activity. Difficulty. Materials Needed. Class Time. Grade Level. Objectives.
 Overview Challenge Students will design, program, and build a robot that drives around in town while avoiding collisions and staying on the roads. The robot should turn around when it reaches the outside
Overview Challenge Students will design, program, and build a robot that drives around in town while avoiding collisions and staying on the roads. The robot should turn around when it reaches the outside
AReViRoad: a virtual reality tool for traffic simulation
 Urban Transport XII: Urban Transport and the Environment in the 21st Century 297 AReViRoad: a virtual reality tool for traffic simulation D. Herviou & E. Maisel European Center of Virtual Reality, Brest,
Urban Transport XII: Urban Transport and the Environment in the 21st Century 297 AReViRoad: a virtual reality tool for traffic simulation D. Herviou & E. Maisel European Center of Virtual Reality, Brest,
Model Deployment Overview. Debby Bezzina Senior Program Manager University of Michigan Transportation Research Institute
 Model Deployment Overview Debby Bezzina Senior Program Manager University of Michigan Transportation Research Institute Test Conductor Team 2 3 Connected Vehicle Technology 4 Safety Pilot Model Deployment
Model Deployment Overview Debby Bezzina Senior Program Manager University of Michigan Transportation Research Institute Test Conductor Team 2 3 Connected Vehicle Technology 4 Safety Pilot Model Deployment
Virtual testing by coupling high fidelity vehicle simulation with microscopic traffic flow simulation
 DYNA4 with DYNAanimation in Co-Simulation with SUMO vehicle under test Virtual testing by coupling high fidelity vehicle simulation with microscopic traffic flow simulation Dr.-Ing. Jakob Kaths TESIS GmbH
DYNA4 with DYNAanimation in Co-Simulation with SUMO vehicle under test Virtual testing by coupling high fidelity vehicle simulation with microscopic traffic flow simulation Dr.-Ing. Jakob Kaths TESIS GmbH
DEVELOPMENT OF A MICROSCOPIC TRAFFIC SIMULATION MODEL FOR INTERACTIVE TRAFFIC ENVIRONMENT
 DEVELOPMENT OF A MICROSCOPIC TRAFFIC SIMULATION MODEL FOR INTERACTIVE TRAFFIC ENVIRONMENT Tomoyoshi SHIRAISHI, Hisatomo HANABUSA, Masao KUWAHARA, Edward CHUNG, Shinji TANAKA, Hideki UENO, Yoshikazu OHBA,
DEVELOPMENT OF A MICROSCOPIC TRAFFIC SIMULATION MODEL FOR INTERACTIVE TRAFFIC ENVIRONMENT Tomoyoshi SHIRAISHI, Hisatomo HANABUSA, Masao KUWAHARA, Edward CHUNG, Shinji TANAKA, Hideki UENO, Yoshikazu OHBA,
Volkswagen Group: Leveraging VIRES VTD to Design a Cooperative Driver Assistance System
 Volkswagen Group: Leveraging VIRES VTD to Design a Cooperative Driver Assistance System By Dr. Kai Franke, Development Online Driver Assistance Systems, Volkswagen AG 10 Engineering Reality Magazine A
Volkswagen Group: Leveraging VIRES VTD to Design a Cooperative Driver Assistance System By Dr. Kai Franke, Development Online Driver Assistance Systems, Volkswagen AG 10 Engineering Reality Magazine A
Intelligent driving TH« TNO I Innovation for live
 Intelligent driving TNO I Innovation for live TH«Intelligent Transport Systems have become an integral part of the world. In addition to the current ITS systems, intelligent vehicles can make a significant
Intelligent driving TNO I Innovation for live TH«Intelligent Transport Systems have become an integral part of the world. In addition to the current ITS systems, intelligent vehicles can make a significant
Stanford Center for AI Safety
 Stanford Center for AI Safety Clark Barrett, David L. Dill, Mykel J. Kochenderfer, Dorsa Sadigh 1 Introduction Software-based systems play important roles in many areas of modern life, including manufacturing,
Stanford Center for AI Safety Clark Barrett, David L. Dill, Mykel J. Kochenderfer, Dorsa Sadigh 1 Introduction Software-based systems play important roles in many areas of modern life, including manufacturing,
Dipartimento di Elettronica Informazione e Bioingegneria Robotics
 Dipartimento di Elettronica Informazione e Bioingegneria Robotics Behavioral robotics @ 2014 Behaviorism behave is what organisms do Behaviorism is built on this assumption, and its goal is to promote
Dipartimento di Elettronica Informazione e Bioingegneria Robotics Behavioral robotics @ 2014 Behaviorism behave is what organisms do Behaviorism is built on this assumption, and its goal is to promote
Inf2D 01: Intelligent Agents and their Environments
 Inf2D 01: Intelligent Agents and their Environments School of Informatics, University of Edinburgh 16/01/18 Slide Credits: Jacques Fleuriot, Michael Rovatsos, Michael Herrmann Structure of Intelligent
Inf2D 01: Intelligent Agents and their Environments School of Informatics, University of Edinburgh 16/01/18 Slide Credits: Jacques Fleuriot, Michael Rovatsos, Michael Herrmann Structure of Intelligent
The GATEway Project London s Autonomous Push
 The GATEway Project London s Autonomous Push 06/2016 Why TRL? Unrivalled industry position with a focus on mobility 80 years independent transport research Public and private sector with global reach 350+
The GATEway Project London s Autonomous Push 06/2016 Why TRL? Unrivalled industry position with a focus on mobility 80 years independent transport research Public and private sector with global reach 350+
5a. Reactive Agents. COMP3411: Artificial Intelligence. Outline. History of Reactive Agents. Reactive Agents. History of Reactive Agents
 COMP3411 15s1 Reactive Agents 1 COMP3411: Artificial Intelligence 5a. Reactive Agents Outline History of Reactive Agents Chemotaxis Behavior-Based Robotics COMP3411 15s1 Reactive Agents 2 Reactive Agents
COMP3411 15s1 Reactive Agents 1 COMP3411: Artificial Intelligence 5a. Reactive Agents Outline History of Reactive Agents Chemotaxis Behavior-Based Robotics COMP3411 15s1 Reactive Agents 2 Reactive Agents
Horizon 2020 ICT Robotics Work Programme (draft - Publication: 20 October 2015)
") NCP TRAINING BRUSSELS 07 OCTOBER 2015 1 Horizon 2020 ICT Robotics Work Programme 2016 2017 (draft - Publication: 20 October 2015) Cécile Huet Deputy Head of Unit Robotics Directorate General for Communication
NCP TRAINING BRUSSELS 07 OCTOBER 2015 1 Horizon 2020 ICT Robotics Work Programme 2016 2017 (draft - Publication: 20 October 2015) Cécile Huet Deputy Head of Unit Robotics Directorate General for Communication
Agent. Pengju Ren. Institute of Artificial Intelligence and Robotics
 Agent Pengju Ren Institute of Artificial Intelligence and Robotics pengjuren@xjtu.edu.cn 1 Review: What is AI? Artificial intelligence (AI) is intelligence exhibited by machines. In computer science, the
Agent Pengju Ren Institute of Artificial Intelligence and Robotics pengjuren@xjtu.edu.cn 1 Review: What is AI? Artificial intelligence (AI) is intelligence exhibited by machines. In computer science, the
The 3xD Simulator for Intelligent Vehicles Professor Paul Jennings. 20 th October 2016
 The 3xD Simulator for Intelligent Vehicles Professor Paul Jennings 20 th October 2016 An academic department within the science faculty Established in 1980 by Professor Lord Bhattacharyya as Warwick Manufacturing
The 3xD Simulator for Intelligent Vehicles Professor Paul Jennings 20 th October 2016 An academic department within the science faculty Established in 1980 by Professor Lord Bhattacharyya as Warwick Manufacturing
Adaptive Controllers for Vehicle Velocity Control for Microscopic Traffic Simulation Models
 Adaptive Controllers for Vehicle Velocity Control for Microscopic Traffic Simulation Models Yiannis Papelis, Omar Ahmad & Horatiu German National Advanced Driving Simulator, The University of Iowa, USA
Adaptive Controllers for Vehicle Velocity Control for Microscopic Traffic Simulation Models Yiannis Papelis, Omar Ahmad & Horatiu German National Advanced Driving Simulator, The University of Iowa, USA
Background Traffic Agents for Driving Simulators
 Background Traffic Agents for Driving Simulators Simulating Traffic in Multiple Environments M.F. de Goeij Master thesis ICA-3507637 t de goey@hotmail.com Utrecht University Supervisors: Dr. Roland J.
Background Traffic Agents for Driving Simulators Simulating Traffic in Multiple Environments M.F. de Goeij Master thesis ICA-3507637 t de goey@hotmail.com Utrecht University Supervisors: Dr. Roland J.
Connected Car Networking
 Connected Car Networking Teng Yang, Francis Wolff and Christos Papachristou Electrical Engineering and Computer Science Case Western Reserve University Cleveland, Ohio Outline Motivation Connected Car
Connected Car Networking Teng Yang, Francis Wolff and Christos Papachristou Electrical Engineering and Computer Science Case Western Reserve University Cleveland, Ohio Outline Motivation Connected Car
App Inventor meets NXT
 App Inventor meets NXT Pre-day Questionnaires About Technocamps We go around schools like yours and show you lots of interesting stuff! We also do things we call bootcamps during holidays! What is a STEM
App Inventor meets NXT Pre-day Questionnaires About Technocamps We go around schools like yours and show you lots of interesting stuff! We also do things we call bootcamps during holidays! What is a STEM
IV Work Area: CONNECTED CARS: ROAD TO VEHICLE COMMUNICATION THROUGH VISIBLE LIGHT. An illustration of traffic control system of tomorrow
 IV Work Area: CONNECTED CARS: ROAD TO VEHICLE COMMUNICATION THROUGH VISIBLE LIGHT An illustration of traffic control system of tomorrow Motivation and Objectives IV, VV, VI optoelectronic WDM cooperative
IV Work Area: CONNECTED CARS: ROAD TO VEHICLE COMMUNICATION THROUGH VISIBLE LIGHT An illustration of traffic control system of tomorrow Motivation and Objectives IV, VV, VI optoelectronic WDM cooperative
Current Technologies in Vehicular Communications
 Current Technologies in Vehicular Communications George Dimitrakopoulos George Bravos Current Technologies in Vehicular Communications George Dimitrakopoulos Department of Informatics and Telematics Harokopio
Current Technologies in Vehicular Communications George Dimitrakopoulos George Bravos Current Technologies in Vehicular Communications George Dimitrakopoulos Department of Informatics and Telematics Harokopio
COMP9414/ 9814/ 3411: Artificial Intelligence. 2. Environment Types. UNSW c Alan Blair,
 COMP9414/ 9814/ 3411: rtificial Intelligence 2. Environment Types COMP9414/9814/3411 16s1 Environments 1 gent Model sensors environment percepts actions? agent actuators COMP9414/9814/3411 16s1 Environments
COMP9414/ 9814/ 3411: rtificial Intelligence 2. Environment Types COMP9414/9814/3411 16s1 Environments 1 gent Model sensors environment percepts actions? agent actuators COMP9414/9814/3411 16s1 Environments
MODULE 10: INTELLIGENT TRANSPORTATION SYSTEMS: SMART WORK ZONES LESSON 1: WORK ZONE SAFETY
 MODULE 10: INTELLIGENT TRANSPORTATION SYSTEMS: SMART WORK ZONES LESSON 1: WORK ZONE SAFETY Connected vehicle (CV) safety applications are designed to increase awareness of what is happening in the environment
MODULE 10: INTELLIGENT TRANSPORTATION SYSTEMS: SMART WORK ZONES LESSON 1: WORK ZONE SAFETY Connected vehicle (CV) safety applications are designed to increase awareness of what is happening in the environment
Presented by: Hesham Rakha, Ph.D., P. Eng.
 Developing Intersection Cooperative Adaptive Cruise Control System Applications Presented by: Hesham Rakha, Ph.D., P. Eng. Director, Center for Sustainable Mobility at Professor, Charles E. Via, Jr. Dept.
Developing Intersection Cooperative Adaptive Cruise Control System Applications Presented by: Hesham Rakha, Ph.D., P. Eng. Director, Center for Sustainable Mobility at Professor, Charles E. Via, Jr. Dept.
Intelligent Agents p.1/25. Intelligent Agents. Chapter 2
 Intelligent Agents p.1/25 Intelligent Agents Chapter 2 Intelligent Agents p.2/25 Outline Agents and environments Rationality PEAS (Performance measure, Environment, Actuators, Sensors) Environment types
Intelligent Agents p.1/25 Intelligent Agents Chapter 2 Intelligent Agents p.2/25 Outline Agents and environments Rationality PEAS (Performance measure, Environment, Actuators, Sensors) Environment types
Prospective Teleautonomy For EOD Operations
 Perception and task guidance Perceived world model & intent Prospective Teleautonomy For EOD Operations Prof. Seth Teller Electrical Engineering and Computer Science Department Computer Science and Artificial
Perception and task guidance Perceived world model & intent Prospective Teleautonomy For EOD Operations Prof. Seth Teller Electrical Engineering and Computer Science Department Computer Science and Artificial
Intelligent Technology for More Advanced Autonomous Driving
 FEATURED ARTICLES Autonomous Driving Technology for Connected Cars Intelligent Technology for More Advanced Autonomous Driving Autonomous driving is recognized as an important technology for dealing with
FEATURED ARTICLES Autonomous Driving Technology for Connected Cars Intelligent Technology for More Advanced Autonomous Driving Autonomous driving is recognized as an important technology for dealing with
COSC343: Artificial Intelligence
 COSC343: Artificial Intelligence Lecture 2: Starting from scratch: robotics and embodied AI Alistair Knott Dept. of Computer Science, University of Otago Alistair Knott (Otago) COSC343 Lecture 2 1 / 29
COSC343: Artificial Intelligence Lecture 2: Starting from scratch: robotics and embodied AI Alistair Knott Dept. of Computer Science, University of Otago Alistair Knott (Otago) COSC343 Lecture 2 1 / 29
Automated Testing of Autonomous Driving Assistance Systems
 Automated Testing of Autonomous Driving Assistance Systems Lionel Briand Vector Testing Symposium, Stuttgart, 2018 SnT Centre Top level research in Information & Communication Technologies Created to fuel
Automated Testing of Autonomous Driving Assistance Systems Lionel Briand Vector Testing Symposium, Stuttgart, 2018 SnT Centre Top level research in Information & Communication Technologies Created to fuel
Autonomous driving made safe
 tm Autonomous driving made safe Founder, Bio Celite Milbrandt Austin, Texas since 1998 Founder of Slacker Radio In dash for Tesla, GM, and Ford. 35M active users 2008 Chief Product Officer of RideScout
tm Autonomous driving made safe Founder, Bio Celite Milbrandt Austin, Texas since 1998 Founder of Slacker Radio In dash for Tesla, GM, and Ford. 35M active users 2008 Chief Product Officer of RideScout
Design of Traffic Flow Simulation System to Minimize Intersection Waiting Time
 Design of Traffic Flow Simulation System to Minimize Intersection Waiting Time Jang, Seung-Ju Department of Computer Engineering, Dongeui University Abstract This paper designs a traffic simulation system
Design of Traffic Flow Simulation System to Minimize Intersection Waiting Time Jang, Seung-Ju Department of Computer Engineering, Dongeui University Abstract This paper designs a traffic simulation system
TRB Workshop on the Future of Road Vehicle Automation
 TRB Workshop on the Future of Road Vehicle Automation Steven E. Shladover University of California PATH Program ITFVHA Meeting, Vienna October 21, 2012 1 Outline TRB background Workshop organization Automation
TRB Workshop on the Future of Road Vehicle Automation Steven E. Shladover University of California PATH Program ITFVHA Meeting, Vienna October 21, 2012 1 Outline TRB background Workshop organization Automation
CS 380: ARTIFICIAL INTELLIGENCE
 CS 380: ARTIFICIAL INTELLIGENCE RATIONAL AGENTS 9/25/2013 Santiago Ontañón santi@cs.drexel.edu https://www.cs.drexel.edu/~santi/teaching/2013/cs380/intro.html Do you think a machine can be made that replicates
CS 380: ARTIFICIAL INTELLIGENCE RATIONAL AGENTS 9/25/2013 Santiago Ontañón santi@cs.drexel.edu https://www.cs.drexel.edu/~santi/teaching/2013/cs380/intro.html Do you think a machine can be made that replicates
Humans and Automated Driving Systems
 Innovation of Automated Driving for Universal Services (SIP-adus) Humans and Automated Driving Systems November 18, 2014 Kiyozumi Unoura Chief Engineer Honda R&D Co., Ltd. Automobile R&D Center Workshop
Innovation of Automated Driving for Universal Services (SIP-adus) Humans and Automated Driving Systems November 18, 2014 Kiyozumi Unoura Chief Engineer Honda R&D Co., Ltd. Automobile R&D Center Workshop
Pervasive Adaptation in Car Crowds
 Pervasive Adaptation in Car Crowds Alois Ferscha and Andreas Riener Department for Pervasive Computing, Johannes Kepler University, A-4040 Linz, Austria Phone: +43(0)732/2468/8555, Fax: +43(0)732/2468/8425
Pervasive Adaptation in Car Crowds Alois Ferscha and Andreas Riener Department for Pervasive Computing, Johannes Kepler University, A-4040 Linz, Austria Phone: +43(0)732/2468/8555, Fax: +43(0)732/2468/8425
Deliverable D1.6 Initial System Specifications Executive Summary
 Deliverable D1.6 Initial System Specifications Executive Summary Version 1.0 Dissemination Project Coordination RE Ford Research and Advanced Engineering Europe Due Date 31.10.2010 Version Date 09.02.2011
Deliverable D1.6 Initial System Specifications Executive Summary Version 1.0 Dissemination Project Coordination RE Ford Research and Advanced Engineering Europe Due Date 31.10.2010 Version Date 09.02.2011
Subsumption Architecture in Swarm Robotics. Cuong Nguyen Viet 16/11/2015
 Subsumption Architecture in Swarm Robotics Cuong Nguyen Viet 16/11/2015 1 Table of content Motivation Subsumption Architecture Background Architecture decomposition Implementation Swarm robotics Swarm
Subsumption Architecture in Swarm Robotics Cuong Nguyen Viet 16/11/2015 1 Table of content Motivation Subsumption Architecture Background Architecture decomposition Implementation Swarm robotics Swarm
Towards Traffic Generation with Individual Driver Behavior Model Based Vehicles
 Towards Traffic Generation with Individual Driver Behavior Model Based Vehicles Benoit Lacroix 1,2, Philippe Mathieu 2, Vincent Rouelle 1, Julien Chaplier 3, Gilles Gallée 3 and Andras Kemeny 1 1 RENAULT,
Towards Traffic Generation with Individual Driver Behavior Model Based Vehicles Benoit Lacroix 1,2, Philippe Mathieu 2, Vincent Rouelle 1, Julien Chaplier 3, Gilles Gallée 3 and Andras Kemeny 1 1 RENAULT,
GNSS in Autonomous Vehicles MM Vision
 GNSS in Autonomous Vehicles MM Vision MM Technology Innovation Automated Driving Technologies (ADT) Evaldo Bruci Context & motivation Within the robotic paradigm Magneti Marelli chose Think & Decision
GNSS in Autonomous Vehicles MM Vision MM Technology Innovation Automated Driving Technologies (ADT) Evaldo Bruci Context & motivation Within the robotic paradigm Magneti Marelli chose Think & Decision
Inter- and Intra-Vehicle Communications
 Inter- and Intra-Vehicle Communications Gilbert Held A Auerbach Publications Taylor 5* Francis Group Boca Raton New York Auerbach Publications is an imprint of the Taylor & Francis Croup, an informa business
Inter- and Intra-Vehicle Communications Gilbert Held A Auerbach Publications Taylor 5* Francis Group Boca Raton New York Auerbach Publications is an imprint of the Taylor & Francis Croup, an informa business
Area Traffic Control System (ATCS)
") Area Traffic Control System (ATCS) 1. Introduction: Area Traffic Control System is an indigenous solution for Indian Road Traffic, which optimizes traffic signal, covering a set of roads for an area in
Area Traffic Control System (ATCS) 1. Introduction: Area Traffic Control System is an indigenous solution for Indian Road Traffic, which optimizes traffic signal, covering a set of roads for an area in
Simulationbased Development of ADAS and Automated Driving with the Help of Machine Learning
 Simulationbased Development of ADAS and Automated Driving with the Help of Machine Learning Dr. Andreas Kuhn A N D A T A München, 2017-06-27 2 Fields of Competence Artificial Intelligence Data Mining Big
Simulationbased Development of ADAS and Automated Driving with the Help of Machine Learning Dr. Andreas Kuhn A N D A T A München, 2017-06-27 2 Fields of Competence Artificial Intelligence Data Mining Big
The Real-Time Control System for Servomechanisms
 The Real-Time Control System for Servomechanisms PETR STODOLA, JAN MAZAL, IVANA MOKRÁ, MILAN PODHOREC Department of Military Management and Tactics University of Defence Kounicova str. 65, Brno CZECH REPUBLIC
The Real-Time Control System for Servomechanisms PETR STODOLA, JAN MAZAL, IVANA MOKRÁ, MILAN PODHOREC Department of Military Management and Tactics University of Defence Kounicova str. 65, Brno CZECH REPUBLIC
알테어의 e-mobility 솔루션 Altair`s e-mobility Solutions
 알테어의 e-mobility 솔루션 Altair`s e-mobility Solutions 한국알테어황의준 Agenda E-mobility: Electrifying transportation Efficient Design Workflow for an Electric Motor for EV/HEV Application Refined Electromagnetic
알테어의 e-mobility 솔루션 Altair`s e-mobility Solutions 한국알테어황의준 Agenda E-mobility: Electrifying transportation Efficient Design Workflow for an Electric Motor for EV/HEV Application Refined Electromagnetic
A SERVICE-ORIENTED SYSTEM ARCHITECTURE FOR THE HUMAN CENTERED DESIGN OF INTELLIGENT TRANSPORTATION SYSTEMS
 Tools and methodologies for ITS design and drivers awareness A SERVICE-ORIENTED SYSTEM ARCHITECTURE FOR THE HUMAN CENTERED DESIGN OF INTELLIGENT TRANSPORTATION SYSTEMS Jan Gačnik, Oliver Häger, Marco Hannibal
Tools and methodologies for ITS design and drivers awareness A SERVICE-ORIENTED SYSTEM ARCHITECTURE FOR THE HUMAN CENTERED DESIGN OF INTELLIGENT TRANSPORTATION SYSTEMS Jan Gačnik, Oliver Häger, Marco Hannibal
Available theses in robotics (March 2018) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin
 Prof. Paolo Rocco Prof. Andrea Maria Zanchettin") Available theses in robotics (March 2018) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Ergonomic positioning of bulky objects Thesis 1 Robot acts as a 3rd hand for workpiece positioning: Muscular fatigue
Available theses in robotics (March 2018) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Ergonomic positioning of bulky objects Thesis 1 Robot acts as a 3rd hand for workpiece positioning: Muscular fatigue
HAVEit Highly Automated Vehicles for Intelligent Transport
 HAVEit Highly Automated Vehicles for Intelligent Transport Holger Zeng Project Manager CONTINENTAL AUTOMOTIVE HAVEit General Information Project full title: Highly Automated Vehicles for Intelligent Transport
HAVEit Highly Automated Vehicles for Intelligent Transport Holger Zeng Project Manager CONTINENTAL AUTOMOTIVE HAVEit General Information Project full title: Highly Automated Vehicles for Intelligent Transport
Diversion Analysis. Appendix K
 Appendix K Appendix K Appendix K Project Description The Project includes the potential closure of the eastbound direction ramp for vehicular traffic at Washington Street and University Avenue. In addition,
Appendix K Appendix K Appendix K Project Description The Project includes the potential closure of the eastbound direction ramp for vehicular traffic at Washington Street and University Avenue. In addition,
Last Time: Acting Humanly: The Full Turing Test
 Last Time: Acting Humanly: The Full Turing Test Alan Turing's 1950 article Computing Machinery and Intelligence discussed conditions for considering a machine to be intelligent Can machines think? Can
Last Time: Acting Humanly: The Full Turing Test Alan Turing's 1950 article Computing Machinery and Intelligence discussed conditions for considering a machine to be intelligent Can machines think? Can
EVALUATION OF DIFFERENT MODALITIES FOR THE INTELLIGENT COOPERATIVE INTERSECTION SAFETY SYSTEM (IRIS) AND SPEED LIMIT SYSTEM
 AND SPEED LIMIT SYSTEM") Effects of ITS on drivers behaviour and interaction with the systems EVALUATION OF DIFFERENT MODALITIES FOR THE INTELLIGENT COOPERATIVE INTERSECTION SAFETY SYSTEM (IRIS) AND SPEED LIMIT SYSTEM Ellen S.
Effects of ITS on drivers behaviour and interaction with the systems EVALUATION OF DIFFERENT MODALITIES FOR THE INTELLIGENT COOPERATIVE INTERSECTION SAFETY SYSTEM (IRIS) AND SPEED LIMIT SYSTEM Ellen S.
Human Factors Studies for Limited- Ability Autonomous Driving Systems (LAADS)
") Human Factors Studies for Limited- Ability Autonomous Driving Systems (LAADS) Glenn Widmann; Delphi Automotive Systems Jeremy Salinger; General Motors Robert Dufour; Delphi Automotive Systems Charles Green;
Human Factors Studies for Limited- Ability Autonomous Driving Systems (LAADS) Glenn Widmann; Delphi Automotive Systems Jeremy Salinger; General Motors Robert Dufour; Delphi Automotive Systems Charles Green;
COMP5121 Mobile Robots
 COMP5121 Mobile Robots Foundations Dr. Mario Gongora mgongora@dmu.ac.uk Overview Basics agents, simulation and intelligence Robots components tasks general purpose robots? Environments structured unstructured
COMP5121 Mobile Robots Foundations Dr. Mario Gongora mgongora@dmu.ac.uk Overview Basics agents, simulation and intelligence Robots components tasks general purpose robots? Environments structured unstructured
Mobile & Enterprise Computing (MEC)/ SocialCars Research Training Group
/ SocialCars Research Training Group") Mobile & Enterprise Computing (MEC)/ SocialCars Research Training Group Prof. Dr. Jörg P. Müller TU Clausthal joerg.mueller@tu-clausthal.de meclab.in.tu-clausthal.de www.socialcars.org Mobile & Enterprise
Mobile & Enterprise Computing (MEC)/ SocialCars Research Training Group Prof. Dr. Jörg P. Müller TU Clausthal joerg.mueller@tu-clausthal.de meclab.in.tu-clausthal.de www.socialcars.org Mobile & Enterprise
PerSEE: a Central Sensors Fusion Electronic Control Unit for the development of perception-based ADAS
 10-4 MVA2015 IAPR International Conference on Machine Vision Applications, May 18-22, 2015, Tokyo, JAPAN PerSEE: a Central Sensors Fusion Electronic Control Unit for the development of perception-based
10-4 MVA2015 IAPR International Conference on Machine Vision Applications, May 18-22, 2015, Tokyo, JAPAN PerSEE: a Central Sensors Fusion Electronic Control Unit for the development of perception-based
Introduction to Real-time software systems Draft Edition
 Introduction to Real-time software systems Draft Edition Jan van Katwijk Janusz Zalewski DRAFT VERSION of November 2, 1998 2 Chapter 1 Introduction 1.1 General introduction Information technology is of
Introduction to Real-time software systems Draft Edition Jan van Katwijk Janusz Zalewski DRAFT VERSION of November 2, 1998 2 Chapter 1 Introduction 1.1 General introduction Information technology is of
Constructing a Traffic Control Process Diagram
 22 Constructing a Traffic Control Process Diagram The purpose of this assignment is to help you improve your understanding of the operation of an actuated traffic controller system by studying eight cases
22 Constructing a Traffic Control Process Diagram The purpose of this assignment is to help you improve your understanding of the operation of an actuated traffic controller system by studying eight cases
Next Generation Traffic Control with Connected and Automated Vehicles
 Next Generation Traffic Control with Connected and Automated Vehicles Henry Liu Department of Civil and Environmental Engineering University of Michigan Transportation Research Institute University of
Next Generation Traffic Control with Connected and Automated Vehicles Henry Liu Department of Civil and Environmental Engineering University of Michigan Transportation Research Institute University of
Lecture Overview. c D. Poole and A. Mackworth 2017 Artificial Intelligence, Lecture 1.1, Page 1 1 / 15
 Lecture Overview What is Artificial Intelligence? Agents acting in an environment Learning objectives: at the end of the class, you should be able to describe what an intelligent agent is identify the
Lecture Overview What is Artificial Intelligence? Agents acting in an environment Learning objectives: at the end of the class, you should be able to describe what an intelligent agent is identify the
Safe, Efficient and Effective Testing of Connected and Autonomous Vehicles Paul Jennings. Franco-British Symposium on ITS 5 th October 2016
 Safe, Efficient and Effective Testing of Connected and Autonomous Vehicles Paul Jennings Franco-British Symposium on ITS 5 th October 2016 An academic department within the science faculty Established
Safe, Efficient and Effective Testing of Connected and Autonomous Vehicles Paul Jennings Franco-British Symposium on ITS 5 th October 2016 An academic department within the science faculty Established
L09. PID, PURE PURSUIT
 1 L09. PID, PURE PURSUIT EECS 498-6: Autonomous Robotics Laboratory Today s Plan 2 Simple controllers Bang-bang PID Pure Pursuit 1 Control 3 Suppose we have a plan: Hey robot! Move north one meter, the
1 L09. PID, PURE PURSUIT EECS 498-6: Autonomous Robotics Laboratory Today s Plan 2 Simple controllers Bang-bang PID Pure Pursuit 1 Control 3 Suppose we have a plan: Hey robot! Move north one meter, the
Automatic Control Systems
 Automatic Control Systems Lecture-1 Basic Concepts of Classical control Emam Fathy Department of Electrical and Control Engineering email: emfmz@yahoo.com 1 What is Control System? A system Controlling
Automatic Control Systems Lecture-1 Basic Concepts of Classical control Emam Fathy Department of Electrical and Control Engineering email: emfmz@yahoo.com 1 What is Control System? A system Controlling
Impact of Connected Vehicle Safety Applications on Driving Behavior at Varying Market Penetrations: A Driving Simulator Study
 Louisiana State University LSU Digital Commons LSU Master's Theses Graduate School 2017 Impact of Connected Vehicle Safety Applications on Driving Behavior at Varying Market Penetrations: A Driving Simulator
Louisiana State University LSU Digital Commons LSU Master's Theses Graduate School 2017 Impact of Connected Vehicle Safety Applications on Driving Behavior at Varying Market Penetrations: A Driving Simulator
Israel Railways No Fault Liability Renewal The Implementation of New Technological Safety Devices at Level Crossings. Amos Gellert, Nataly Kats
 Mr. Amos Gellert Technological aspects of level crossing facilities Israel Railways No Fault Liability Renewal The Implementation of New Technological Safety Devices at Level Crossings Deputy General Manager
Mr. Amos Gellert Technological aspects of level crossing facilities Israel Railways No Fault Liability Renewal The Implementation of New Technological Safety Devices at Level Crossings Deputy General Manager
Positioning Challenges in Cooperative Vehicular Safety Systems
 Positioning Challenges in Cooperative Vehicular Safety Systems Dr. Luca Delgrossi Mercedes-Benz Research & Development North America, Inc. October 15, 2009 Positioning for Automotive Navigation Personal
Positioning Challenges in Cooperative Vehicular Safety Systems Dr. Luca Delgrossi Mercedes-Benz Research & Development North America, Inc. October 15, 2009 Positioning for Automotive Navigation Personal
Cellular-based Vehicle to Pedestrian (V2P) Adaptive Communication for Collision Avoidance
 Adaptive Communication for Collision Avoidance") Cellular-based Vehicle to Pedestrian (V2P) Adaptive Communication for Collision Avoidance Mehrdad Bagheri, Matti Siekkinen, Jukka K. Nurminen Aalto University - Department of Computer Science and Engineering
Cellular-based Vehicle to Pedestrian (V2P) Adaptive Communication for Collision Avoidance Mehrdad Bagheri, Matti Siekkinen, Jukka K. Nurminen Aalto University - Department of Computer Science and Engineering
A Winning Combination
 A Winning Combination Risk factors Statements in this presentation that refer to future plans and expectations are forward-looking statements that involve a number of risks and uncertainties. Words such
A Winning Combination Risk factors Statements in this presentation that refer to future plans and expectations are forward-looking statements that involve a number of risks and uncertainties. Words such
Evaluation based on drivers' needs analysis
 Evaluation based on drivers' needs analysis Pierre Van Elslande (IFSTTAR) DaCoTA EU Conference On Road Safety data and knowledge-based Policy-making Athens, 22 23 November 2012 Project co-financed by the
Evaluation based on drivers' needs analysis Pierre Van Elslande (IFSTTAR) DaCoTA EU Conference On Road Safety data and knowledge-based Policy-making Athens, 22 23 November 2012 Project co-financed by the
HIT3002: Introduction to Artificial Intelligence
 HIT3002: Introduction to Artificial Intelligence Intelligent Agents Outline Agents and environments. The vacuum-cleaner world The concept of rational behavior. Environments. Agent structure. Swinburne
HIT3002: Introduction to Artificial Intelligence Intelligent Agents Outline Agents and environments. The vacuum-cleaner world The concept of rational behavior. Environments. Agent structure. Swinburne
Electronics the hidden sector. Dr Kathryn Walsh Director, Electronics-enabled Products KTN
 Electronics the hidden sector Dr Kathryn Walsh Director, Electronics-enabled Products KTN Here to celebrate! The projects The Innovative electronics Manufacturing Research Centre The Industry! Why hidden?
Electronics the hidden sector Dr Kathryn Walsh Director, Electronics-enabled Products KTN Here to celebrate! The projects The Innovative electronics Manufacturing Research Centre The Industry! Why hidden?
Intro to AI. AI is a huge field. AI is a huge field 2/19/15. What is AI. One definition:
 Intro to AI CS30 David Kauchak Spring 2015 http://www.bbspot.com/comics/pc-weenies/2008/02/3248.php Adapted from notes from: Sara Owsley Sood AI is a huge field What is AI AI is a huge field What is AI
Intro to AI CS30 David Kauchak Spring 2015 http://www.bbspot.com/comics/pc-weenies/2008/02/3248.php Adapted from notes from: Sara Owsley Sood AI is a huge field What is AI AI is a huge field What is AI
MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT
 MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT F. TIECHE, C. FACCHINETTI and H. HUGLI Institute of Microtechnology, University of Neuchâtel, Rue de Tivoli 28, CH-2003
MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT F. TIECHE, C. FACCHINETTI and H. HUGLI Institute of Microtechnology, University of Neuchâtel, Rue de Tivoli 28, CH-2003
Preparing Simulative Evaluation of the GLOSA Application. ITS World Congress, Vienna, 26 of October 2012
 Preparing Simulative Evaluation of the GLOSA Application ITS World Congress, Vienna, 26 of October 2012 D. Krajzewicz, L. Bieker, J. Erdmann; German Aerospace Center Introduction DRIVE C2X Aim: to lay
Preparing Simulative Evaluation of the GLOSA Application ITS World Congress, Vienna, 26 of October 2012 D. Krajzewicz, L. Bieker, J. Erdmann; German Aerospace Center Introduction DRIVE C2X Aim: to lay
INTERSECTION DECISION SUPPORT SYSTEM USING GAME THEORY ALGORITHM
 Connected Vehicle Technology Challenge INTERSECTION DECISION SUPPORT SYSTEM USING GAME THEORY ALGORITHM Dedicated Short Range Communications (DSRC) Game Theory Ismail Zohdy 2011 INTRODUCTION Many of the
Connected Vehicle Technology Challenge INTERSECTION DECISION SUPPORT SYSTEM USING GAME THEORY ALGORITHM Dedicated Short Range Communications (DSRC) Game Theory Ismail Zohdy 2011 INTRODUCTION Many of the
Artificial Intelligence: Definition
 Lecture Notes Artificial Intelligence: Definition Dae-Won Kim School of Computer Science & Engineering Chung-Ang University What are AI Systems? Deep Blue defeated the world chess champion Garry Kasparov
Lecture Notes Artificial Intelligence: Definition Dae-Won Kim School of Computer Science & Engineering Chung-Ang University What are AI Systems? Deep Blue defeated the world chess champion Garry Kasparov
Work Domain Analysis (WDA) for Ecological Interface Design (EID) of Vehicle Control Display
 for Ecological Interface Design (EID) of Vehicle Control Display") Work Domain Analysis (WDA) for Ecological Interface Design (EID) of Vehicle Control Display SUK WON LEE, TAEK SU NAM, ROHAE MYUNG Division of Information Management Engineering Korea University 5-Ga, Anam-Dong,
Work Domain Analysis (WDA) for Ecological Interface Design (EID) of Vehicle Control Display SUK WON LEE, TAEK SU NAM, ROHAE MYUNG Division of Information Management Engineering Korea University 5-Ga, Anam-Dong,
MAVeC 19 Autobot Challenge
 Overview of the Challenge Name: TurtleBot3 Autobot Challenge Platform: TurtleBot3 MAVeC 19 Autobot Challenge Description: Autonomous Driving Mission Competition using ROS and TurtleBot3 platform Introduction
Overview of the Challenge Name: TurtleBot3 Autobot Challenge Platform: TurtleBot3 MAVeC 19 Autobot Challenge Description: Autonomous Driving Mission Competition using ROS and TurtleBot3 platform Introduction
List of Figures List of Tables. Chapter 1: Introduction 1
 Contents List of Figures List of Tables iii viii Chapter 1: Introduction 1 Chapter 2: Study of Pedestrian Behaviors in Urban Space 8 2.1 Effects of Space Configuration and Attraction on Spatial Behavior
Contents List of Figures List of Tables iii viii Chapter 1: Introduction 1 Chapter 2: Study of Pedestrian Behaviors in Urban Space 8 2.1 Effects of Space Configuration and Attraction on Spatial Behavior
Right-of-Way Rules as Use Case for Integrating GOLOG and Qualitative Reasoning
 Right-of-Way Rules as Use Case for Integrating GOLOG and Qualitative Reasoning Florian Pommerening, Stefan Wölfl, and Matthias Westphal Department of Computer Science, University of Freiburg, Georges-Köhler-Allee,
Right-of-Way Rules as Use Case for Integrating GOLOG and Qualitative Reasoning Florian Pommerening, Stefan Wölfl, and Matthias Westphal Department of Computer Science, University of Freiburg, Georges-Köhler-Allee,
Smart eye using Ultrasonic sensor in Electrical vehicles for Differently Able.
 IOSR Journal of Electrical and Electronics Engineering (IOSR-JEEE) e-issn: 2278-1676,p-ISSN: 2320-3331, Volume 9, Issue 2 Ver. V (Mar Apr. 2014), PP 01-06 Smart eye using Ultrasonic sensor in Electrical
IOSR Journal of Electrical and Electronics Engineering (IOSR-JEEE) e-issn: 2278-1676,p-ISSN: 2320-3331, Volume 9, Issue 2 Ver. V (Mar Apr. 2014), PP 01-06 Smart eye using Ultrasonic sensor in Electrical
TRAFFIC ENGINEERING SAB3843. CHE ROS BIN ISMAIL and OTHMAN BIN CHE PUAN
 TRAFFIC ENGINEERING SAB3843 GEOMETRIC DESIGN OF ROADS CHE ROS BIN ISMAIL and OTHMAN BIN CHE PUAN SOME MAJOR ELEMENTS OF ROAD GEOMETRY: Horizontal alignment, Vertical alignment, Sight distances, Crosssection,
TRAFFIC ENGINEERING SAB3843 GEOMETRIC DESIGN OF ROADS CHE ROS BIN ISMAIL and OTHMAN BIN CHE PUAN SOME MAJOR ELEMENTS OF ROAD GEOMETRY: Horizontal alignment, Vertical alignment, Sight distances, Crosssection,
Final Report Non Hit Car And Truck
 Final Report Non Hit Car And Truck 2010-2013 Project within Vehicle and Traffic Safety Author: Anders Almevad Date 2014-03-17 Content 1. Executive summary... 3 2. Background... 3. Objective... 4. Project
Final Report Non Hit Car And Truck 2010-2013 Project within Vehicle and Traffic Safety Author: Anders Almevad Date 2014-03-17 Content 1. Executive summary... 3 2. Background... 3. Objective... 4. Project
Virtual Shadow: Making Cross Traffic Dynamics Visible through Augmented Reality Head Up Display
 Proceedings of the Human Factors and Ergonomics Society 2016 Annual Meeting 2093 Virtual Shadow: Making Cross Traffic Dynamics Visible through Augmented Reality Head Up Display Hyungil Kim, Jessica D.
Proceedings of the Human Factors and Ergonomics Society 2016 Annual Meeting 2093 Virtual Shadow: Making Cross Traffic Dynamics Visible through Augmented Reality Head Up Display Hyungil Kim, Jessica D.
Invited talk IET-Renault Workshop Autonomous Vehicles: From theory to full scale applications Novotel Paris Les Halles, June 18 th 2015
 Risk assessment & Decision-making for safe Vehicle Navigation under Uncertainty Christian LAUGIER, First class Research Director at Inria http://emotion.inrialpes.fr/laugier Contributions from Mathias
Risk assessment & Decision-making for safe Vehicle Navigation under Uncertainty Christian LAUGIER, First class Research Director at Inria http://emotion.inrialpes.fr/laugier Contributions from Mathias
Steering a Driving Simulator Using the Queueing Network-Model Human Processor (QN-MHP)
") University of Iowa Iowa Research Online Driving Assessment Conference 2003 Driving Assessment Conference Jul 22nd, 12:00 AM Steering a Driving Simulator Using the Queueing Network-Model Human Processor
University of Iowa Iowa Research Online Driving Assessment Conference 2003 Driving Assessment Conference Jul 22nd, 12:00 AM Steering a Driving Simulator Using the Queueing Network-Model Human Processor
Robotic Systems. Jeff Jaster Deputy Associate Director for Autonomous Systems US Army TARDEC Intelligent Ground Systems
 Robotic Systems Jeff Jaster Deputy Associate Director for Autonomous Systems US Army TARDEC Intelligent Ground Systems Robotics Life Cycle Mission Integrate, Explore, and Develop Robotics, Network and
Robotic Systems Jeff Jaster Deputy Associate Director for Autonomous Systems US Army TARDEC Intelligent Ground Systems Robotics Life Cycle Mission Integrate, Explore, and Develop Robotics, Network and
Engineering Diploma Resource Guide ST150 ETP Research & Design (Engineering)
") Engineering Diploma Resource Guide ST50 ETP Research & Design (Engineering) Introduction Whether we are looking to improve a current system or design a completely new product for the market place, we have
Engineering Diploma Resource Guide ST50 ETP Research & Design (Engineering) Introduction Whether we are looking to improve a current system or design a completely new product for the market place, we have
Machine Learning for Intelligent Transportation Systems
 Machine Learning for Intelligent Transportation Systems Patrick Emami (CISE), Anand Rangarajan (CISE), Sanjay Ranka (CISE), Lily Elefteriadou (CE) MALT Lab, UFTI September 6, 2018 ITS - A Broad Perspective
Machine Learning for Intelligent Transportation Systems Patrick Emami (CISE), Anand Rangarajan (CISE), Sanjay Ranka (CISE), Lily Elefteriadou (CE) MALT Lab, UFTI September 6, 2018 ITS - A Broad Perspective
Structure of Intelligent Agents. Examples of Agents 1. Examples of Agents 2. Intelligent Agents and their Environments. An agent:
 Intelligent Agents and their Environments Michael Rovatsos University of Edinburgh Structure of Intelligent Agents An agent: Perceives its environment, Through its sensors, Then achieves its goals By acting
Intelligent Agents and their Environments Michael Rovatsos University of Edinburgh Structure of Intelligent Agents An agent: Perceives its environment, Through its sensors, Then achieves its goals By acting
The application of Work Domain Analysis (WDA) for the development of vehicle control display
 for the development of vehicle control display") Proceedings of the 7th WSEAS International Conference on Applied Informatics and Communications, Athens, Greece, August 24-26, 2007 160 The application of Work Domain Analysis (WDA) for the development
Proceedings of the 7th WSEAS International Conference on Applied Informatics and Communications, Athens, Greece, August 24-26, 2007 160 The application of Work Domain Analysis (WDA) for the development
Introduction to Systems Engineering
 p. 1/2 ENES 489P Hands-On Systems Engineering Projects Introduction to Systems Engineering Mark Austin E-mail: austin@isr.umd.edu Institute for Systems Research, University of Maryland, College Park Career
p. 1/2 ENES 489P Hands-On Systems Engineering Projects Introduction to Systems Engineering Mark Austin E-mail: austin@isr.umd.edu Institute for Systems Research, University of Maryland, College Park Career