Automated Testing of Autonomous Driving Assistance Systems
|
|
|
- Job Cook
- 5 years ago
- Views:
Transcription

1 Automated Testing of Autonomous Driving Assistance Systems Lionel Briand Vector Testing Symposium, Stuttgart, 2018



2 SnT Centre Top level research in Information & Communication Technologies Created to fuel the national innovation system 2



3 Collaborative SnT Research in industrial context Addresses actual needs Well-defined problem Long-term collaborations Our lab is the industry 3












4 Strategic Research Areas Secure and Compliant Data Management FinTech Cybersecurity Space Systems and Resources Autonomous Vehicles Internet of Things 4
5 Introduction 5

6 Cyber-Physical Systems A system of collaborating computational elements controlling physical entities 6


")
")
7 Advanced Driver Assistance Systems (ADAS) Automated Emergency Braking (AEB) Lane Departure Warning (LDW) Pedestrian Protection (PP) Traffic Sign Recognition (TSR) 7
8 Advanced Driver Assistance Systems (ADAS) Decisions are made over time based on sensor data Environment Sensors Sensors /Camera Actuators Decision Controller ADAS 8
9 A General and Fundamental Shift Increasingly so, it is easier to learn behavior from data using machine learning, rather than specify and code Example: Neural networks (deep learning) Millions of weights learned No explicit code, no specifications Verification, testing? 9
10 Testing Implications Test oracles/verdicts? No explicit, expected test behavior Test completeness? No source code, no specification 10
")
")

11 CPS Development Process Model in the Loop Function modeling (Matlab/Simulink) Software in the Loop Hardware in the Loop Architecture modeling (SysML/C-Code) Controller Real-time analysis Plant/Environment Integration 11 Deployment (embedded-c) Testing (Expensive)
12 Opportunities and Challenges Early functional models (MiL) offer opportunities for early functional verification and testing But a challenge for constraint solvers and model checkers: Continuous mathematical models, e.g., differential equations Discrete software models for code generation, but with complex operations Library functions in binary code 12
13 Automotive Environment Highly varied environments, e.g., road topology, weather, building and pedestrians Huge number of possible scenarios, e.g., determined by trajectories of pedestrians and cars ADAS play an increasingly critical role A challenge for testing 13
14 Testing Advanced Driver Assistance Systems 14

15 Objective Testing ADAS Identify and characterize most critical/risky scenarios Test oracle: Safety properties Need scalable test strategy due to large input space 15
")
16 Automated Emergency Braking System (AEB) 16 17

17 Example Critical Situation AEB detects a pedestrian in front of the car with a high degree of certainty, but an accident happens where the car hits the pedestrian with a relatively high speed 17

18 On-road testing Testing ADAS Simulation-based (model) testing Time-consuming Expensive 18 A simulator based on physical/mathematical models
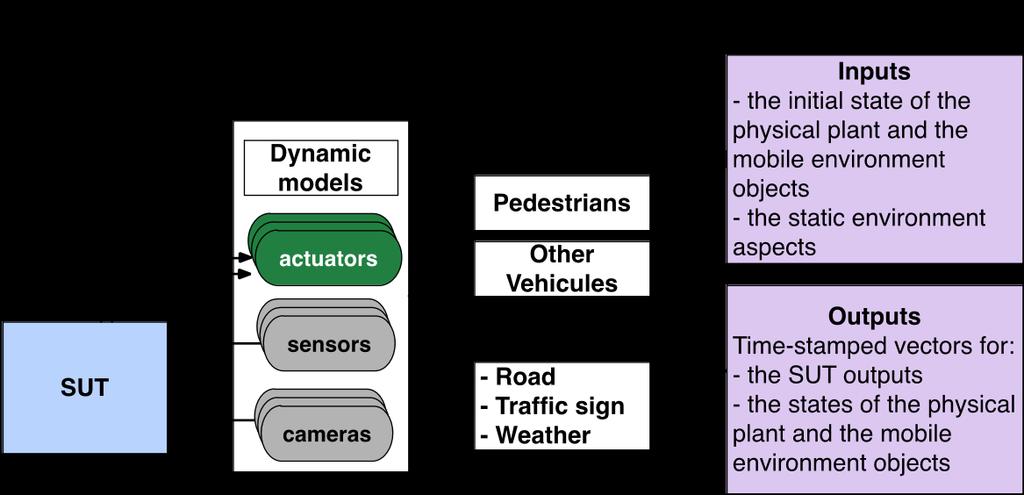
19 Model Testing ADAS Simulator (Matlab/Simulink) Matlab/Simulink Model Test input ADAS (SUT) Physical plant (vehicle / sensors / actuators) Other cars Pedestrians Environment (weather / roads / traffic signs) Test output Time-stamped output 19
20 Our Goal Developing an automated testing technique for ADAS To help engineers efficiently and effectively explore the complex test input space of ADAS To identify critical (failure-revealing) test scenarios Characterization of input conditions that lead to most critical situations 20
21 ADAS Testing Challenges Test input space is large, complex and multidimensional Explaining failures and fault localization are difficult Execution of physics-based simulation models is computationally expensive 21
22 Test Inputs/Outputs Weather - weathertype: Condition RoadSide Object Trees Parked Cars Camera Sensor - field of view: Real 1 1 «uses» Road SceneLight «enumeration» - roadtype: RT - intensity: Real Condition fog - curved * 1 1 Vehicle - v 0 : Real 1 «positioned» 1 AEB Test Scenario - simulationtime: Real - timestep: Real 1 1 Collision - state: Boolean Detection - certainty: Real - rain - snow - normal 1 Pedestrian - x 0 : Real - y 0 : Real 1 - θ: Real - v 0 : Real 1 Environment inputs Mobile object inputs Outputs «enumeration» RT - straight - ramped Position - x: Real - y: Real * Output Trajectory - AWA 1 1 Dynamic Object 22
23 Learnable Evolutionary Algorithms Machine-learning Classification Search Learn regions likely to contain most critical (failure) test scenarios Search for critical test scenarios in the critical regions, and help refine classification models 23
24 Search-Based Software Testing Definition: The application of meta-heuristic, search-based optimization techniques to find nearoptimal solutions in software testing problems. Problem Reformulation: reformulating typical software testing problems as optimization problems Fitness Function: definition of functions to optimize Search Algorithms: applying search algorithm to optimise such functions - Hill climbing - Genetic Algorithms - Simulated Annealing - Tabu Search - Particle Swarm Optimization - 24
 Mutation: offsprings inherits properties of their parents (with some mutations) Iteration: generation after generation the new offspring fit better")
25 Genetic Algorithms (GAs) Genetic Algorithm: search algorithm inspired by evolution theory Natural selection: Individuals that best fit the natural environment survive Reproduction: surviving individuals generate offsprings (next generation) Mutation: offsprings inherits properties of their parents (with some mutations) Iteration: generation after generation the new offspring fit better the environment than their parents
26 Search-Based Test Generation Search for test input data with certain properties Search driven by fitness function Examples: Coverage source code branch, requirements conditions Non-linearity of software (if, loops, ): complex, discontinuous, nonlinear search spaces (Baresel) Genetic Algorithm Search-Based Software Testing: Past, Present and Future Phil McMinn 26 Genetic Algorithm
27 Example: Unit Testing Unit Testing Minimize Maximize Execution cost Code coverage Number of test cases Detected bugs Multiple objectives Large search space: All possible test cases! 27
28 Multiple Objectives: Pareto Front F 1 x Pareto front Dominated by x Individual A Pareto dominates individual B if A is at least as good as B in every objective and better than B in at least one objective. F 2 28
29 Multiple Objectives: Pareto Front F 1 x Pareto front Dominated by x Individual A Pareto dominates individual B if A is at least as good as B in every objective and better than B in at least one objective. F 2 A multi-objective optimization algorithm (e.g., NSGA II) must: Guide the search towards the global Pareto-Optimal front. Maintain solution diversity in the Pareto-Optimal front. 28
30 Decision Trees All points RoadTopology (CR =[10 40](m)) Count 1200 non-critical 79% critical 21% RoadTopology(CR = 5, Straight, RH =[4 12](m)) Count 564 Count 636 non-critical 59% critical 41% p 0 < p 0 >= non-critical 98% critical 2% Count 412 non-critical 49% critical 51% v p 0 >= 7.2km/h v Count 152 non-critical 84% critical 16% p 0 < 7.2km/h Critical region Count 230 Count 182 non-critical 31% critical 69% non-critical 72% critical 28% Partition the input space into homogeneous regions 29
31 Our ADAS Testing We use decision tree classification models We use multi-objective search algorithm (NSGAII) Objective Functions: 1. Minimum distance between the pedestrian and the field of view 2. The car speed at the time of collision 3. The probability that the object detected is a pedestrian Each search iteration calls simulation to compute objective functions Input values required to perform the simulation: Precipitation Fogginess Road shape Visibility range Car-speed Personspeed Personposition Personorientation 30
32 Genetic Evolution Guided by Classification Initial input 31
33 Genetic Evolution Guided by Classification Initial input Fitness computation 31
34 Genetic Evolution Guided by Classification Initial input Fitness computation Classification 31
35 Genetic Evolution Guided by Classification Initial input Fitness computation Classification Selection 31
36 Genetic Evolution Guided by Classification Initial input Fitness computation Classification Selection Breeding 31


37 Iterative Process Initial Classification Model Refined Classification Model We focus on generating more scenarios in the critical region, respecting the conditions that lead to that region 32 We get a more refined decision tree with more critical regions and more homogeneous areas
38 Research Questions RQ1: Does the decision tree technique help guide the evolutionary search and make it more effective? RQ2: Does our approach help characterize and converge towards homogeneous critical regions? Failure explanation Usefulness (feedback from engineers) 33
39 Usefulness The characterizations of the different critical regions can help with: (1) Debugging the system model (or the simulator) (2) Identifying possible hardware changes to increase ADAS safety (3) Providing proper warnings to drivers 34

40 Automated Testing of Feature Interactions Using Many Objective Search 35
41 System Integration 36
42 Case Study: SafeDrive Our case study describes an automotive system consisting of four advanced driver assistance features: Advanced Cruise Control (ACC) Traffic Sign Recognition (TSR) Pedestrian Protection (PP) Automated Emergency Breaking (AEB) 37
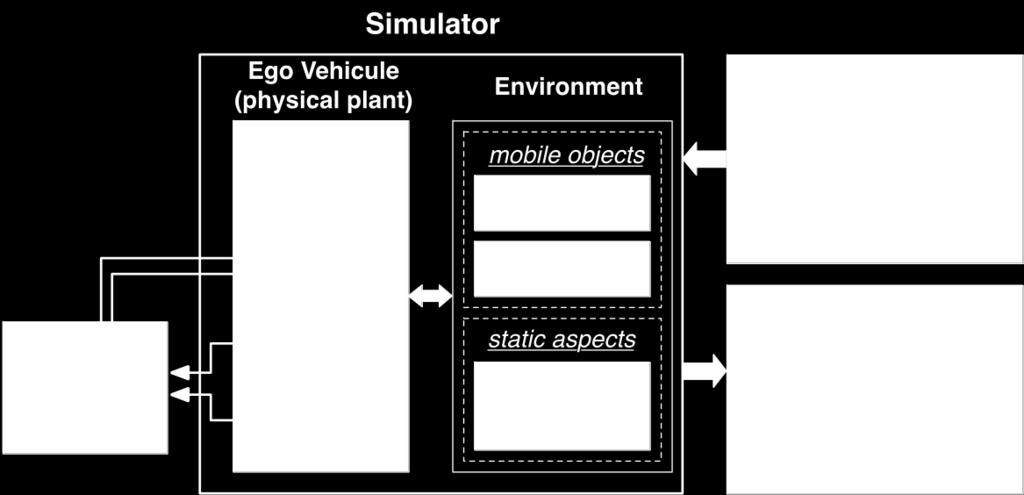
43 Simulation Feedback loop 38

44 Actuator Command Vectors 39
45 Safety Requirements 40
46 Features & Interactions Behavior of features based on machine learning algorithms processing sensor and camera data Interactions between features may lead to violating safety requirements, even if features are correct Example: ACC is controlling the car by ordering it to accelerate since the leading car is far away, while a pedestrian starts crossing the road. PP starts sending braking commands to avoid hitting the pedestrian. Complex: predict and analyze possible interactions at the requirements level Resolution strategies cannot always be determined statically and may depend on the state of the environment 41
47 Objective Automated and scalable testing to help ensure that resolution strategies are safe Detect undesired feature interactions Assumptions: IntC is white-box (integrator is testing), features were previously tested 42
48 Input Variables 43
49 Search Input space is very large Dedicated search algorithm directed/guided by many objectives (fitness functions) Fitness (distance) functions: reward test cases that are more likely to reveal integration failures leading to safety violations Combine three types of functions: (1) safety violations, (2) unsafe overriding by integration component (IntC), (3) coverage of the decision structure of IntC Many test objectives to be satisfied by the test suite 44
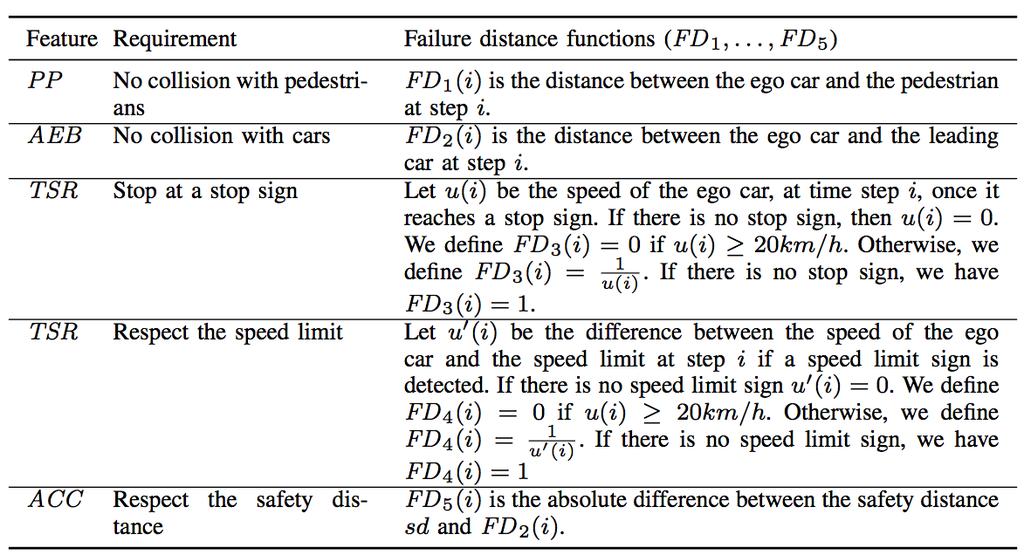
50 Failure Distance Goal: Reveal safety requirements violations Fitness functions based on the trajectory vectors for the ego car, the leading car and the pedestrian, generated by the simulator PP fitness: Minimum distance between the car and the pedestrian during the simulation time. AEB fitness: Minimum distance between the car and the leading car during the simulation time. 45
51 Unsafe Overriding Distance Goal: Find faults faults in integration component Reward test cases generating integration outputs deviating from the individual feature outputs, in such a way as to possibly lead to safety violations. Example: A feature f issues a braking command while the integration component issues no braking command or a braking command with a lower force than that of f. 46
52 Branch Distance Many decision branches in IntC Branch coverage of IntC Fitness: Approach level and branch distance d (standard for code coverage) d(b,tc) = 0 when tc covers b 47
53 Combining Distance Functions Goal: Execute every branch of IntC such that while executing that branch, IntC unsafely overrides every feature f and its outputs violate every safety requirement related to f. Indicates that tc has not covered branch j Branch covered but did not cause unsafe override of f Branch covered, unsafe override, but did not violate requirement I 48
54 Search Algorithm Best test suite covers all (feasible) search objectives, i.e., for all IntC branches and all safety requirements Not a Pareto front optimization problem Objectives compete with each others for each test case Example: We cannot have the ego car violating the speed limit after hitting the leading car in one test case Tailored, many-objective genetic algorithm Must be efficient (test case executions are very expensive) 49
55 Evaluation on SafeDrive 50
56 Summary Machine learning plays an increasingly prominent role in autonomous systems No (complete) requirements, specifications, or even code Some safety and mission-critical requirements Neural networks (deep learning) with millions of weights How do we gain confidence, through automated testing, in such software in a scalable and cost-effective way? We propose solutions based on metaheuristic search and machine learning 51
57 Related Testing Research Testing of hybrid controllers Testing timeliness requirements Testing for deadline misses (schedulability) HiL acceptance testing prioritization Testing for security vulnerabilities Find publications on: svv.lu 52
58 Acknowledgements Raja Ben Abdessalem Shiva Nejati Annibale Panichella IEE, Luxembourg 53
59 References R. Ben Abdessalem et al., "Testing Advanced Driver Assistance Systems Using Multi-Objective Search and Neural Networks, ACM/IEEE ASE 2016 R. Ben Abdessalem et al., "Testing Vision-Based Control Systems Using Learnable Evolutionary Algorithms, IEEE/ ACM ICSE 2018 R. Ben Abdessalem et al., "Testing Autonomous Cars for Feature Interaction Failures using Many-Objective Search, IEEE/ACM/IEEE ASE
60 Automated Testing of Autonomous Driving Assistance Systems Lionel Briand Vector Testing Symposium, Stuttgart, 2018
Intelligent Technology for More Advanced Autonomous Driving
 FEATURED ARTICLES Autonomous Driving Technology for Connected Cars Intelligent Technology for More Advanced Autonomous Driving Autonomous driving is recognized as an important technology for dealing with
FEATURED ARTICLES Autonomous Driving Technology for Connected Cars Intelligent Technology for More Advanced Autonomous Driving Autonomous driving is recognized as an important technology for dealing with
A Winning Combination
 A Winning Combination Risk factors Statements in this presentation that refer to future plans and expectations are forward-looking statements that involve a number of risks and uncertainties. Words such
A Winning Combination Risk factors Statements in this presentation that refer to future plans and expectations are forward-looking statements that involve a number of risks and uncertainties. Words such
ADAS Development using Advanced Real-Time All-in-the-Loop Simulators. Roberto De Vecchi VI-grade Enrico Busto - AddFor
 ADAS Development using Advanced Real-Time All-in-the-Loop Simulators Roberto De Vecchi VI-grade Enrico Busto - AddFor The Scenario The introduction of ADAS and AV has created completely new challenges
ADAS Development using Advanced Real-Time All-in-the-Loop Simulators Roberto De Vecchi VI-grade Enrico Busto - AddFor The Scenario The introduction of ADAS and AV has created completely new challenges
Final Report Non Hit Car And Truck
 Final Report Non Hit Car And Truck 2010-2013 Project within Vehicle and Traffic Safety Author: Anders Almevad Date 2014-03-17 Content 1. Executive summary... 3 2. Background... 3. Objective... 4. Project
Final Report Non Hit Car And Truck 2010-2013 Project within Vehicle and Traffic Safety Author: Anders Almevad Date 2014-03-17 Content 1. Executive summary... 3 2. Background... 3. Objective... 4. Project
Evaluation of Connected Vehicle Technology for Concept Proposal Using V2X Testbed
 AUTOMOTIVE Evaluation of Connected Vehicle Technology for Concept Proposal Using V2X Testbed Yoshiaki HAYASHI*, Izumi MEMEZAWA, Takuji KANTOU, Shingo OHASHI, and Koichi TAKAYAMA ----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------
AUTOMOTIVE Evaluation of Connected Vehicle Technology for Concept Proposal Using V2X Testbed Yoshiaki HAYASHI*, Izumi MEMEZAWA, Takuji KANTOU, Shingo OHASHI, and Koichi TAKAYAMA ----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------
Choosing the Optimum Mix of Sensors for Driver Assistance and Autonomous Vehicles
 Choosing the Optimum Mix of Sensors for Driver Assistance and Autonomous Vehicles Ali Osman Ors May 2, 2017 Copyright 2017 NXP Semiconductors 1 Sensing Technology Comparison Rating: H = High, M=Medium,
Choosing the Optimum Mix of Sensors for Driver Assistance and Autonomous Vehicles Ali Osman Ors May 2, 2017 Copyright 2017 NXP Semiconductors 1 Sensing Technology Comparison Rating: H = High, M=Medium,
Presentation on DeepTest: Automated Testing of Deep-Neural-N. Deep-Neural-Network-driven Autonomous Car
 Presentation on DeepTest: Automated Testing of Deep-Neural-Network-driven Autonomous Car 1 Department of Computer Science, University of Virginia https://qdata.github.io/deep2read/ August 26, 2018 DeepTest:
Presentation on DeepTest: Automated Testing of Deep-Neural-Network-driven Autonomous Car 1 Department of Computer Science, University of Virginia https://qdata.github.io/deep2read/ August 26, 2018 DeepTest:
Embracing Complexity. Gavin Walker Development Manager
 Embracing Complexity Gavin Walker Development Manager 1 MATLAB and Simulink Proven Ability to Make the Complex Simpler 1970 Stanford Ph.D. thesis, with thousands of lines of Fortran code 2 MATLAB and Simulink
Embracing Complexity Gavin Walker Development Manager 1 MATLAB and Simulink Proven Ability to Make the Complex Simpler 1970 Stanford Ph.D. thesis, with thousands of lines of Fortran code 2 MATLAB and Simulink
Glossary of terms. Short explanation
 Glossary Concept Module. Video Short explanation Abstraction 2.4 Capturing the essence of the behavior of interest (getting a model or representation) Action in the control Derivative 4.2 The control signal
Glossary Concept Module. Video Short explanation Abstraction 2.4 Capturing the essence of the behavior of interest (getting a model or representation) Action in the control Derivative 4.2 The control signal
Last Time: Acting Humanly: The Full Turing Test
 Last Time: Acting Humanly: The Full Turing Test Alan Turing's 1950 article Computing Machinery and Intelligence discussed conditions for considering a machine to be intelligent Can machines think? Can
Last Time: Acting Humanly: The Full Turing Test Alan Turing's 1950 article Computing Machinery and Intelligence discussed conditions for considering a machine to be intelligent Can machines think? Can
interactive IP: Perception platform and modules
 interactive IP: Perception platform and modules Angelos Amditis, ICCS 19 th ITS-WC-SIS76: Advanced integrated safety applications based on enhanced perception, active interventions and new advanced sensors
interactive IP: Perception platform and modules Angelos Amditis, ICCS 19 th ITS-WC-SIS76: Advanced integrated safety applications based on enhanced perception, active interventions and new advanced sensors
HAVEit Highly Automated Vehicles for Intelligent Transport
 HAVEit Highly Automated Vehicles for Intelligent Transport Holger Zeng Project Manager CONTINENTAL AUTOMOTIVE HAVEit General Information Project full title: Highly Automated Vehicles for Intelligent Transport
HAVEit Highly Automated Vehicles for Intelligent Transport Holger Zeng Project Manager CONTINENTAL AUTOMOTIVE HAVEit General Information Project full title: Highly Automated Vehicles for Intelligent Transport
What is a Simulation? Simulation & Modeling. Why Do Simulations? Emulators versus Simulators. Why Do Simulations? Why Do Simulations?
 What is a Simulation? Simulation & Modeling Introduction and Motivation A system that represents or emulates the behavior of another system over time; a computer simulation is one where the system doing
What is a Simulation? Simulation & Modeling Introduction and Motivation A system that represents or emulates the behavior of another system over time; a computer simulation is one where the system doing
Virtual Homologation of Software- Intensive Safety Systems: From ESC to Automated Driving
 Virtual Homologation of Software- Intensive Safety Systems: From ESC to Automated Driving Dr. Houssem Abdellatif Global Head Autonomous Driving & ADAS TÜV SÜD Auto Service Christian Gnandt Lead Engineer
Virtual Homologation of Software- Intensive Safety Systems: From ESC to Automated Driving Dr. Houssem Abdellatif Global Head Autonomous Driving & ADAS TÜV SÜD Auto Service Christian Gnandt Lead Engineer
Achieving Desirable Gameplay Objectives by Niched Evolution of Game Parameters
 Achieving Desirable Gameplay Objectives by Niched Evolution of Game Parameters Scott Watson, Andrew Vardy, Wolfgang Banzhaf Department of Computer Science Memorial University of Newfoundland St John s.
Achieving Desirable Gameplay Objectives by Niched Evolution of Game Parameters Scott Watson, Andrew Vardy, Wolfgang Banzhaf Department of Computer Science Memorial University of Newfoundland St John s.
William Milam Ford Motor Co
 Sharing technology for a stronger America Verification Challenges in Automotive Embedded Systems William Milam Ford Motor Co Chair USCAR CPS Task Force 10/20/2011 What is USCAR? The United States Council
Sharing technology for a stronger America Verification Challenges in Automotive Embedded Systems William Milam Ford Motor Co Chair USCAR CPS Task Force 10/20/2011 What is USCAR? The United States Council
Virtual testing by coupling high fidelity vehicle simulation with microscopic traffic flow simulation
 DYNA4 with DYNAanimation in Co-Simulation with SUMO vehicle under test Virtual testing by coupling high fidelity vehicle simulation with microscopic traffic flow simulation Dr.-Ing. Jakob Kaths TESIS GmbH
DYNA4 with DYNAanimation in Co-Simulation with SUMO vehicle under test Virtual testing by coupling high fidelity vehicle simulation with microscopic traffic flow simulation Dr.-Ing. Jakob Kaths TESIS GmbH
Autonomous driving made safe
 tm Autonomous driving made safe Founder, Bio Celite Milbrandt Austin, Texas since 1998 Founder of Slacker Radio In dash for Tesla, GM, and Ford. 35M active users 2008 Chief Product Officer of RideScout
tm Autonomous driving made safe Founder, Bio Celite Milbrandt Austin, Texas since 1998 Founder of Slacker Radio In dash for Tesla, GM, and Ford. 35M active users 2008 Chief Product Officer of RideScout
Combining ROS and AI for fail-operational automated driving
 Combining ROS and AI for fail-operational automated driving Prof. Dr. Daniel Watzenig Virtual Vehicle Research Center, Graz, Austria and Institute of Automation and Control at Graz University of Technology
Combining ROS and AI for fail-operational automated driving Prof. Dr. Daniel Watzenig Virtual Vehicle Research Center, Graz, Austria and Institute of Automation and Control at Graz University of Technology
Israel Railways No Fault Liability Renewal The Implementation of New Technological Safety Devices at Level Crossings. Amos Gellert, Nataly Kats
 Mr. Amos Gellert Technological aspects of level crossing facilities Israel Railways No Fault Liability Renewal The Implementation of New Technological Safety Devices at Level Crossings Deputy General Manager
Mr. Amos Gellert Technological aspects of level crossing facilities Israel Railways No Fault Liability Renewal The Implementation of New Technological Safety Devices at Level Crossings Deputy General Manager
Multi-objective Optimization Inspired by Nature
 Evolutionary algorithms Multi-objective Optimization Inspired by Nature Jürgen Branke Institute AIFB University of Karlsruhe, Germany Karlsruhe Institute of Technology Darwin s principle of natural evolution:
Evolutionary algorithms Multi-objective Optimization Inspired by Nature Jürgen Branke Institute AIFB University of Karlsruhe, Germany Karlsruhe Institute of Technology Darwin s principle of natural evolution:
Industrial Applications and Challenges for Verifying Reactive Embedded Software. Tom Bienmüller, SC 2 Summer School, MPI Saarbrücken, August 2017
 Industrial Applications and Challenges for Verifying Reactive Embedded Software Tom Bienmüller, SC 2 Summer School, MPI Saarbrücken, August 2017 Agenda 2 Who am I? Who is BTC Embedded Systems? Formal Methods
Industrial Applications and Challenges for Verifying Reactive Embedded Software Tom Bienmüller, SC 2 Summer School, MPI Saarbrücken, August 2017 Agenda 2 Who am I? Who is BTC Embedded Systems? Formal Methods
Physics Based Sensor simulation
 Physics Based Sensor simulation Jordan Gorrochotegui - Product Manager Software and Services Mike Phillips Software Engineer Restricted Siemens AG 2017 Realize innovation. Siemens offers solutions across
Physics Based Sensor simulation Jordan Gorrochotegui - Product Manager Software and Services Mike Phillips Software Engineer Restricted Siemens AG 2017 Realize innovation. Siemens offers solutions across
Intelligent Driving Agents
 Intelligent Driving Agents The agent approach to tactical driving in autonomous vehicles and traffic simulation Presentation Master s thesis Patrick Ehlert January 29 th, 2001 Imagine. Sensors Actuators
Intelligent Driving Agents The agent approach to tactical driving in autonomous vehicles and traffic simulation Presentation Master s thesis Patrick Ehlert January 29 th, 2001 Imagine. Sensors Actuators
A.I in Automotive? Why and When.
 A.I in Automotive? Why and When. AGENDA 01 02 03 04 Definitions A.I? A.I in automotive Now? Next big A.I breakthrough in Automotive 01 DEFINITIONS DEFINITIONS Artificial Intelligence Artificial Intelligence:
A.I in Automotive? Why and When. AGENDA 01 02 03 04 Definitions A.I? A.I in automotive Now? Next big A.I breakthrough in Automotive 01 DEFINITIONS DEFINITIONS Artificial Intelligence Artificial Intelligence:
Intelligent driving TH« TNO I Innovation for live
 Intelligent driving TNO I Innovation for live TH«Intelligent Transport Systems have become an integral part of the world. In addition to the current ITS systems, intelligent vehicles can make a significant
Intelligent driving TNO I Innovation for live TH«Intelligent Transport Systems have become an integral part of the world. In addition to the current ITS systems, intelligent vehicles can make a significant
Automated Software Engineering Writing Code to Help You Write Code. Gregory Gay CSCE Computing in the Modern World October 27, 2015
 Automated Software Engineering Writing Code to Help You Write Code Gregory Gay CSCE 190 - Computing in the Modern World October 27, 2015 Software Engineering The development and evolution of high-quality
Automated Software Engineering Writing Code to Help You Write Code Gregory Gay CSCE 190 - Computing in the Modern World October 27, 2015 Software Engineering The development and evolution of high-quality
Distributed Control-as-a-Service with Wireless Swarm Systems"
 Distributed Control-as-a-Service with Wireless Swarm Systems" Prof. Rahul Mangharam Director, Real-Time & Embedded Systems Lab Dept. Electrical & Systems Engineering Dept. Computer & Information Science
Distributed Control-as-a-Service with Wireless Swarm Systems" Prof. Rahul Mangharam Director, Real-Time & Embedded Systems Lab Dept. Electrical & Systems Engineering Dept. Computer & Information Science
Simulationbased Development of ADAS and Automated Driving with the Help of Machine Learning
 Simulationbased Development of ADAS and Automated Driving with the Help of Machine Learning Dr. Andreas Kuhn A N D A T A München, 2017-06-27 2 Fields of Competence Artificial Intelligence Data Mining Big
Simulationbased Development of ADAS and Automated Driving with the Help of Machine Learning Dr. Andreas Kuhn A N D A T A München, 2017-06-27 2 Fields of Competence Artificial Intelligence Data Mining Big
ARGUING THE SAFETY OF MACHINE LEARNING FOR HIGHLY AUTOMATED DRIVING USING ASSURANCE CASES LYDIA GAUERHOF BOSCH CORPORATE RESEARCH
 ARGUING THE SAFETY OF MACHINE LEARNING FOR HIGHLY AUTOMATED DRIVING USING ASSURANCE CASES 14.12.2017 LYDIA GAUERHOF BOSCH CORPORATE RESEARCH Arguing Safety of Machine Learning for Highly Automated Driving
ARGUING THE SAFETY OF MACHINE LEARNING FOR HIGHLY AUTOMATED DRIVING USING ASSURANCE CASES 14.12.2017 LYDIA GAUERHOF BOSCH CORPORATE RESEARCH Arguing Safety of Machine Learning for Highly Automated Driving
FOUR TOTAL TRANSFER CAPABILITY. 4.1 Total transfer capability CHAPTER
 CHAPTER FOUR TOTAL TRANSFER CAPABILITY R structuring of power system aims at involving the private power producers in the system to supply power. The restructured electric power industry is characterized
CHAPTER FOUR TOTAL TRANSFER CAPABILITY R structuring of power system aims at involving the private power producers in the system to supply power. The restructured electric power industry is characterized
Program Automotive Security and Privacy
 FFI BOARD FUNDED PROGRAM Program Automotive Security and Privacy 2015-11-03 Innehållsförteckning 1 Abstract... 3 2 Background... 4 3 Program objectives... 5 4 Program description... 5 5 Program scope...
FFI BOARD FUNDED PROGRAM Program Automotive Security and Privacy 2015-11-03 Innehållsförteckning 1 Abstract... 3 2 Background... 4 3 Program objectives... 5 4 Program description... 5 5 Program scope...
TRB Workshop on the Future of Road Vehicle Automation
 TRB Workshop on the Future of Road Vehicle Automation Steven E. Shladover University of California PATH Program ITFVHA Meeting, Vienna October 21, 2012 1 Outline TRB background Workshop organization Automation
TRB Workshop on the Future of Road Vehicle Automation Steven E. Shladover University of California PATH Program ITFVHA Meeting, Vienna October 21, 2012 1 Outline TRB background Workshop organization Automation
Figure 1.1: Quanser Driving Simulator
 1 INTRODUCTION The Quanser HIL Driving Simulator (QDS) is a modular and expandable LabVIEW model of a car driving on a closed track. The model is intended as a platform for the development, implementation
1 INTRODUCTION The Quanser HIL Driving Simulator (QDS) is a modular and expandable LabVIEW model of a car driving on a closed track. The model is intended as a platform for the development, implementation
Transportation Informatics Group, ALPEN-ADRIA University of Klagenfurt. Transportation Informatics Group University of Klagenfurt 3/10/2009 1
 Machine Vision Transportation Informatics Group University of Klagenfurt Alireza Fasih, 2009 3/10/2009 1 Address: L4.2.02, Lakeside Park, Haus B04, Ebene 2, Klagenfurt-Austria Index Driver Fatigue Detection
Machine Vision Transportation Informatics Group University of Klagenfurt Alireza Fasih, 2009 3/10/2009 1 Address: L4.2.02, Lakeside Park, Haus B04, Ebene 2, Klagenfurt-Austria Index Driver Fatigue Detection
CS686: High-level Motion/Path Planning Applications
 CS686: High-level Motion/Path Planning Applications Sung-Eui Yoon ( 윤성의 ) Course URL: http://sglab.kaist.ac.kr/~sungeui/mpa Class Objectives Discuss my general research view on motion planning Discuss
CS686: High-level Motion/Path Planning Applications Sung-Eui Yoon ( 윤성의 ) Course URL: http://sglab.kaist.ac.kr/~sungeui/mpa Class Objectives Discuss my general research view on motion planning Discuss
Stock Price Prediction Using Multilayer Perceptron Neural Network by Monitoring Frog Leaping Algorithm
 Stock Price Prediction Using Multilayer Perceptron Neural Network by Monitoring Frog Leaping Algorithm Ahdieh Rahimi Garakani Department of Computer South Tehran Branch Islamic Azad University Tehran,
Stock Price Prediction Using Multilayer Perceptron Neural Network by Monitoring Frog Leaping Algorithm Ahdieh Rahimi Garakani Department of Computer South Tehran Branch Islamic Azad University Tehran,
A SERVICE-ORIENTED SYSTEM ARCHITECTURE FOR THE HUMAN CENTERED DESIGN OF INTELLIGENT TRANSPORTATION SYSTEMS
 Tools and methodologies for ITS design and drivers awareness A SERVICE-ORIENTED SYSTEM ARCHITECTURE FOR THE HUMAN CENTERED DESIGN OF INTELLIGENT TRANSPORTATION SYSTEMS Jan Gačnik, Oliver Häger, Marco Hannibal
Tools and methodologies for ITS design and drivers awareness A SERVICE-ORIENTED SYSTEM ARCHITECTURE FOR THE HUMAN CENTERED DESIGN OF INTELLIGENT TRANSPORTATION SYSTEMS Jan Gačnik, Oliver Häger, Marco Hannibal
SESAR EXPLORATORY RESEARCH. Dr. Stella Tkatchova 21/07/2015
 SESAR EXPLORATORY RESEARCH Dr. Stella Tkatchova 21/07/2015 1 Why SESAR? European ATM - Essential component in air transport system (worth 8.4 billion/year*) 2 FOUNDING MEMBERS Complex infrastructure =
SESAR EXPLORATORY RESEARCH Dr. Stella Tkatchova 21/07/2015 1 Why SESAR? European ATM - Essential component in air transport system (worth 8.4 billion/year*) 2 FOUNDING MEMBERS Complex infrastructure =
CarSim/TruckSim/BikeSim Real-Time Hardware In the Loop Mechanical Simulation Corporation
 CarSim/TruckSim/BikeSim Real-Time Hardware In the Loop Mechanical Simulation Corporation www.carsim.com What is Hardware In the Loop (HIL)? Pure Simulation Software In the Loop (SIL) Plant Model Simulation
CarSim/TruckSim/BikeSim Real-Time Hardware In the Loop Mechanical Simulation Corporation www.carsim.com What is Hardware In the Loop (HIL)? Pure Simulation Software In the Loop (SIL) Plant Model Simulation
Evolutionary robotics Jørgen Nordmoen
 INF3480 Evolutionary robotics Jørgen Nordmoen Slides: Kyrre Glette Today: Evolutionary robotics Why evolutionary robotics Basics of evolutionary optimization INF3490 will discuss algorithms in detail Illustrating
INF3480 Evolutionary robotics Jørgen Nordmoen Slides: Kyrre Glette Today: Evolutionary robotics Why evolutionary robotics Basics of evolutionary optimization INF3490 will discuss algorithms in detail Illustrating
Biologically Inspired Embodied Evolution of Survival
 Biologically Inspired Embodied Evolution of Survival Stefan Elfwing 1,2 Eiji Uchibe 2 Kenji Doya 2 Henrik I. Christensen 1 1 Centre for Autonomous Systems, Numerical Analysis and Computer Science, Royal
Biologically Inspired Embodied Evolution of Survival Stefan Elfwing 1,2 Eiji Uchibe 2 Kenji Doya 2 Henrik I. Christensen 1 1 Centre for Autonomous Systems, Numerical Analysis and Computer Science, Royal
Embedding Artificial Intelligence into Our Lives
 Embedding Artificial Intelligence into Our Lives Michael Thompson, Synopsys D&R IP-SOC DAYS Santa Clara April 2018 1 Agenda Introduction What AI is and is Not Where AI is being used Rapid Advance of AI
Embedding Artificial Intelligence into Our Lives Michael Thompson, Synopsys D&R IP-SOC DAYS Santa Clara April 2018 1 Agenda Introduction What AI is and is Not Where AI is being used Rapid Advance of AI
The GATEway Project London s Autonomous Push
 The GATEway Project London s Autonomous Push 06/2016 Why TRL? Unrivalled industry position with a focus on mobility 80 years independent transport research Public and private sector with global reach 350+
The GATEway Project London s Autonomous Push 06/2016 Why TRL? Unrivalled industry position with a focus on mobility 80 years independent transport research Public and private sector with global reach 350+
A New Approach to the Design and Verification of Complex Systems
 A New Approach to the Design and Verification of Complex Systems Research Scientist Palo Alto Research Center Intelligent Systems Laboratory Embedded Reasoning Area Tolga Kurtoglu, Ph.D. Complexity Highly
A New Approach to the Design and Verification of Complex Systems Research Scientist Palo Alto Research Center Intelligent Systems Laboratory Embedded Reasoning Area Tolga Kurtoglu, Ph.D. Complexity Highly
PEGASUS Effectively ensuring automated driving. Prof. Dr.-Ing. Karsten Lemmer April 6, 2017
 PEGASUS Effectively ensuring automated driving. Prof. Dr.-Ing. Karsten Lemmer April 6, 2017 Starting Position for Automated Driving Top issue! Technology works Confidence Testing differently automated
PEGASUS Effectively ensuring automated driving. Prof. Dr.-Ing. Karsten Lemmer April 6, 2017 Starting Position for Automated Driving Top issue! Technology works Confidence Testing differently automated
Traffic Control for a Swarm of Robots: Avoiding Group Conflicts
 Traffic Control for a Swarm of Robots: Avoiding Group Conflicts Leandro Soriano Marcolino and Luiz Chaimowicz Abstract A very common problem in the navigation of robotic swarms is when groups of robots
Traffic Control for a Swarm of Robots: Avoiding Group Conflicts Leandro Soriano Marcolino and Luiz Chaimowicz Abstract A very common problem in the navigation of robotic swarms is when groups of robots
23270: AUGMENTED REALITY FOR NAVIGATION AND INFORMATIONAL ADAS. Sergii Bykov Technical Lead Machine Learning 12 Oct 2017
 23270: AUGMENTED REALITY FOR NAVIGATION AND INFORMATIONAL ADAS Sergii Bykov Technical Lead Machine Learning 12 Oct 2017 Product Vision Company Introduction Apostera GmbH with headquarter in Munich, was
23270: AUGMENTED REALITY FOR NAVIGATION AND INFORMATIONAL ADAS Sergii Bykov Technical Lead Machine Learning 12 Oct 2017 Product Vision Company Introduction Apostera GmbH with headquarter in Munich, was
INTERSECTION DECISION SUPPORT SYSTEM USING GAME THEORY ALGORITHM
 Connected Vehicle Technology Challenge INTERSECTION DECISION SUPPORT SYSTEM USING GAME THEORY ALGORITHM Dedicated Short Range Communications (DSRC) Game Theory Ismail Zohdy 2011 INTRODUCTION Many of the
Connected Vehicle Technology Challenge INTERSECTION DECISION SUPPORT SYSTEM USING GAME THEORY ALGORITHM Dedicated Short Range Communications (DSRC) Game Theory Ismail Zohdy 2011 INTRODUCTION Many of the
SIS63-Building the Future-Advanced Integrated Safety Applications: interactive Perception platform and fusion modules results
 SIS63-Building the Future-Advanced Integrated Safety Applications: interactive Perception platform and fusion modules results Angelos Amditis (ICCS) and Lali Ghosh (DEL) 18 th October 2013 20 th ITS World
SIS63-Building the Future-Advanced Integrated Safety Applications: interactive Perception platform and fusion modules results Angelos Amditis (ICCS) and Lali Ghosh (DEL) 18 th October 2013 20 th ITS World
Lecture 10: Memetic Algorithms - I. An Introduction to Meta-Heuristics, Produced by Qiangfu Zhao (Since 2012), All rights reserved
, All rights reserved") Lecture 10: Memetic Algorithms - I Lec10/1 Contents Definition of memetic algorithms Definition of memetic evolution Hybrids that are not memetic algorithms 1 st order memetic algorithms 2 nd order memetic
Lecture 10: Memetic Algorithms - I Lec10/1 Contents Definition of memetic algorithms Definition of memetic evolution Hybrids that are not memetic algorithms 1 st order memetic algorithms 2 nd order memetic
Stanford Center for AI Safety
 Stanford Center for AI Safety Clark Barrett, David L. Dill, Mykel J. Kochenderfer, Dorsa Sadigh 1 Introduction Software-based systems play important roles in many areas of modern life, including manufacturing,
Stanford Center for AI Safety Clark Barrett, David L. Dill, Mykel J. Kochenderfer, Dorsa Sadigh 1 Introduction Software-based systems play important roles in many areas of modern life, including manufacturing,
Mehrdad Amirghasemi a* Reza Zamani a
 The roles of evolutionary computation, fitness landscape, constructive methods and local searches in the development of adaptive systems for infrastructure planning Mehrdad Amirghasemi a* Reza Zamani a
The roles of evolutionary computation, fitness landscape, constructive methods and local searches in the development of adaptive systems for infrastructure planning Mehrdad Amirghasemi a* Reza Zamani a
Evolutionary Computation and Machine Intelligence
 Evolutionary Computation and Machine Intelligence Prabhas Chongstitvatana Chulalongkorn University necsec 2005 1 What is Evolutionary Computation What is Machine Intelligence How EC works Learning Robotics
Evolutionary Computation and Machine Intelligence Prabhas Chongstitvatana Chulalongkorn University necsec 2005 1 What is Evolutionary Computation What is Machine Intelligence How EC works Learning Robotics
Human-Swarm Interaction
 Human-Swarm Interaction a brief primer Andreas Kolling irobot Corp. Pasadena, CA Swarm Properties - simple and distributed - from the operator s perspective - distributed algorithms and information processing
Human-Swarm Interaction a brief primer Andreas Kolling irobot Corp. Pasadena, CA Swarm Properties - simple and distributed - from the operator s perspective - distributed algorithms and information processing
Computer vision, wearable computing and the future of transportation
 Computer vision, wearable computing and the future of transportation Amnon Shashua Hebrew University, Mobileye, OrCam 1 Computer Vision that will Change Transportation Amnon Shashua Mobileye 2 Computer
Computer vision, wearable computing and the future of transportation Amnon Shashua Hebrew University, Mobileye, OrCam 1 Computer Vision that will Change Transportation Amnon Shashua Mobileye 2 Computer
Smart Grid Reconfiguration Using Genetic Algorithm and NSGA-II
 Smart Grid Reconfiguration Using Genetic Algorithm and NSGA-II 1 * Sangeeta Jagdish Gurjar, 2 Urvish Mewada, 3 * Parita Vinodbhai Desai 1 Department of Electrical Engineering, AIT, Gujarat Technical University,
Smart Grid Reconfiguration Using Genetic Algorithm and NSGA-II 1 * Sangeeta Jagdish Gurjar, 2 Urvish Mewada, 3 * Parita Vinodbhai Desai 1 Department of Electrical Engineering, AIT, Gujarat Technical University,
Robotic Systems. Jeff Jaster Deputy Associate Director for Autonomous Systems US Army TARDEC Intelligent Ground Systems
 Robotic Systems Jeff Jaster Deputy Associate Director for Autonomous Systems US Army TARDEC Intelligent Ground Systems Robotics Life Cycle Mission Integrate, Explore, and Develop Robotics, Network and
Robotic Systems Jeff Jaster Deputy Associate Director for Autonomous Systems US Army TARDEC Intelligent Ground Systems Robotics Life Cycle Mission Integrate, Explore, and Develop Robotics, Network and
Dr George Gillespie. CEO HORIBA MIRA Ltd. Sponsors
 Dr George Gillespie CEO HORIBA MIRA Ltd Sponsors Intelligent Connected Vehicle Roadmap George Gillespie September 2017 www.automotivecouncil.co.uk ICV Roadmap built on Travellers Needs study plus extensive
Dr George Gillespie CEO HORIBA MIRA Ltd Sponsors Intelligent Connected Vehicle Roadmap George Gillespie September 2017 www.automotivecouncil.co.uk ICV Roadmap built on Travellers Needs study plus extensive
National Instruments Accelerating Innovation and Discovery
 National Instruments Accelerating Innovation and Discovery There s a way to do it better. Find it. Thomas Edison Engineers and scientists have the power to help meet the biggest challenges our planet faces
National Instruments Accelerating Innovation and Discovery There s a way to do it better. Find it. Thomas Edison Engineers and scientists have the power to help meet the biggest challenges our planet faces
Revision of the EU General Safety Regulation and Pedestrian Safety Regulation
 AC.nl Revision of the EU General Safety Regulation and Pedestrian Safety Regulation 11 September 2018 ETSC isafer Fitting safety as standard Directorate-General for Internal Market, Automotive and Mobility
AC.nl Revision of the EU General Safety Regulation and Pedestrian Safety Regulation 11 September 2018 ETSC isafer Fitting safety as standard Directorate-General for Internal Market, Automotive and Mobility
Using FMI/ SSP for Development of Autonomous Driving
 Using FMI/ SSP for Development of Autonomous Driving presented by Jochen Köhler (ZF) FMI User Meeting 15.05.2017 Prague / Czech Republic H.M. Heinkel S.Rude P. R. Mai J. Köhler M. Rühl / A. Pillekeit Motivation
Using FMI/ SSP for Development of Autonomous Driving presented by Jochen Köhler (ZF) FMI User Meeting 15.05.2017 Prague / Czech Republic H.M. Heinkel S.Rude P. R. Mai J. Köhler M. Rühl / A. Pillekeit Motivation
RECOMMENDATION ITU-R M.1310* TRANSPORT INFORMATION AND CONTROL SYSTEMS (TICS) OBJECTIVES AND REQUIREMENTS (Question ITU-R 205/8)
 OBJECTIVES AND REQUIREMENTS (Question ITU-R 205/8)") Rec. ITU-R M.1310 1 RECOMMENDATION ITU-R M.1310* TRANSPORT INFORMATION AND CONTROL SYSTEMS (TICS) OBJECTIVES AND REQUIREMENTS (Question ITU-R 205/8) Rec. ITU-R M.1310 (1997) Summary This Recommendation
Rec. ITU-R M.1310 1 RECOMMENDATION ITU-R M.1310* TRANSPORT INFORMATION AND CONTROL SYSTEMS (TICS) OBJECTIVES AND REQUIREMENTS (Question ITU-R 205/8) Rec. ITU-R M.1310 (1997) Summary This Recommendation
Development of a driver information and warning system with vehicle hardware-in-the-loop simulations
 Delft University of Technology Delft Center for Systems and Control Technical report 09-042 Development of a driver information and warning system with vehicle hardware-in-the-loop simulations O.J. Gietelink,
Delft University of Technology Delft Center for Systems and Control Technical report 09-042 Development of a driver information and warning system with vehicle hardware-in-the-loop simulations O.J. Gietelink,
Reinforcement Learning for CPS Safety Engineering. Sam Green, Çetin Kaya Koç, Jieliang Luo University of California, Santa Barbara
 Reinforcement Learning for CPS Safety Engineering Sam Green, Çetin Kaya Koç, Jieliang Luo University of California, Santa Barbara Motivations Safety-critical duties desired by CPS? Autonomous vehicle control:
Reinforcement Learning for CPS Safety Engineering Sam Green, Çetin Kaya Koç, Jieliang Luo University of California, Santa Barbara Motivations Safety-critical duties desired by CPS? Autonomous vehicle control:
AN0503 Using swarm bee LE for Collision Avoidance Systems (CAS)
") AN0503 Using swarm bee LE for Collision Avoidance Systems (CAS) 1.3 NA-14-0267-0019-1.3 Document Information Document Title: Document Version: 1.3 Current Date: 2016-05-18 Print Date: 2016-05-18 Document
AN0503 Using swarm bee LE for Collision Avoidance Systems (CAS) 1.3 NA-14-0267-0019-1.3 Document Information Document Title: Document Version: 1.3 Current Date: 2016-05-18 Print Date: 2016-05-18 Document
Positioning Challenges in Cooperative Vehicular Safety Systems
 Positioning Challenges in Cooperative Vehicular Safety Systems Dr. Luca Delgrossi Mercedes-Benz Research & Development North America, Inc. October 15, 2009 Positioning for Automotive Navigation Personal
Positioning Challenges in Cooperative Vehicular Safety Systems Dr. Luca Delgrossi Mercedes-Benz Research & Development North America, Inc. October 15, 2009 Positioning for Automotive Navigation Personal
Networked and Distributed Control Systems Lecture 1. Tamas Keviczky and Nathan van de Wouw
 Networked and Distributed Control Systems Lecture 1 Tamas Keviczky and Nathan van de Wouw Lecturers / contact information Dr. T. Keviczky (Tamas) Office: 34-C-3-310 E-mail: t.keviczky@tudelft.nl Prof.dr.ir.
Networked and Distributed Control Systems Lecture 1 Tamas Keviczky and Nathan van de Wouw Lecturers / contact information Dr. T. Keviczky (Tamas) Office: 34-C-3-310 E-mail: t.keviczky@tudelft.nl Prof.dr.ir.
Automated Driving Systems with Model-Based Design for ISO 26262:2018 and SOTIF
 Automated Driving Systems with Model-Based Design for ISO 26262:2018 and SOTIF Konstantin Dmitriev The MathWorks, Inc. Certification and Standards Group 2018 The MathWorks, Inc. 1 Agenda Use of simulation
Automated Driving Systems with Model-Based Design for ISO 26262:2018 and SOTIF Konstantin Dmitriev The MathWorks, Inc. Certification and Standards Group 2018 The MathWorks, Inc. 1 Agenda Use of simulation
Following Dirt Roads at Night-Time
 Following Dirt Roads at Night-Time Sensors and Features for Lane Recognition and Tracking Sebastian F. X. Bayerl Thorsten Luettel Hans-Joachim Wuensche Autonomous Systems Technology (TAS) Department of
Following Dirt Roads at Night-Time Sensors and Features for Lane Recognition and Tracking Sebastian F. X. Bayerl Thorsten Luettel Hans-Joachim Wuensche Autonomous Systems Technology (TAS) Department of
Invited talk IET-Renault Workshop Autonomous Vehicles: From theory to full scale applications Novotel Paris Les Halles, June 18 th 2015
 Risk assessment & Decision-making for safe Vehicle Navigation under Uncertainty Christian LAUGIER, First class Research Director at Inria http://emotion.inrialpes.fr/laugier Contributions from Mathias
Risk assessment & Decision-making for safe Vehicle Navigation under Uncertainty Christian LAUGIER, First class Research Director at Inria http://emotion.inrialpes.fr/laugier Contributions from Mathias
The Key to the Internet-of-Things: Conquering Complexity One Step at a Time
 The Key to the Internet-of-Things: Conquering Complexity One Step at a Time at IEEE QRS2017 Prague, CZ June 19, 2017 Adam T. Drobot Wayne, PA 19087 Outline What is IoT? Where is IoT in its evolution? A
The Key to the Internet-of-Things: Conquering Complexity One Step at a Time at IEEE QRS2017 Prague, CZ June 19, 2017 Adam T. Drobot Wayne, PA 19087 Outline What is IoT? Where is IoT in its evolution? A
Effective Collision Avoidance System Using Modified Kalman Filter
 Effective Collision Avoidance System Using Modified Kalman Filter Dnyaneshwar V. Avatirak, S. L. Nalbalwar & N. S. Jadhav DBATU Lonere E-mail : dvavatirak@dbatu.ac.in, nalbalwar_sanjayan@yahoo.com, nsjadhav@dbatu.ac.in
Effective Collision Avoidance System Using Modified Kalman Filter Dnyaneshwar V. Avatirak, S. L. Nalbalwar & N. S. Jadhav DBATU Lonere E-mail : dvavatirak@dbatu.ac.in, nalbalwar_sanjayan@yahoo.com, nsjadhav@dbatu.ac.in
The role of testing in verification and certification Kerstin Eder
 The role of testing in verification and certification Kerstin Eder Design Automation and Verification, Microelectronics [and Trustworthy Systems Laboratory] Verification and Validation for Safety in Robots,
The role of testing in verification and certification Kerstin Eder Design Automation and Verification, Microelectronics [and Trustworthy Systems Laboratory] Verification and Validation for Safety in Robots,
Real-Time Testing Made Easy with Simulink Real-Time
 Real-Time Testing Made Easy with Simulink Real-Time Andreas Uschold Application Engineer MathWorks Martin Rosser Technical Sales Engineer Speedgoat 2015 The MathWorks, Inc. 1 Model-Based Design Continuous
Real-Time Testing Made Easy with Simulink Real-Time Andreas Uschold Application Engineer MathWorks Martin Rosser Technical Sales Engineer Speedgoat 2015 The MathWorks, Inc. 1 Model-Based Design Continuous
NAVIGATION OF MOBILE ROBOT USING THE PSO PARTICLE SWARM OPTIMIZATION
 Journal of Academic and Applied Studies (JAAS) Vol. 2(1) Jan 2012, pp. 32-38 Available online @ www.academians.org ISSN1925-931X NAVIGATION OF MOBILE ROBOT USING THE PSO PARTICLE SWARM OPTIMIZATION Sedigheh
Journal of Academic and Applied Studies (JAAS) Vol. 2(1) Jan 2012, pp. 32-38 Available online @ www.academians.org ISSN1925-931X NAVIGATION OF MOBILE ROBOT USING THE PSO PARTICLE SWARM OPTIMIZATION Sedigheh
NSF. Hybrid Systems: From Models to Code. Tom Henzinger. UC Berkeley. French Guyana, June 4, 1996 $800 million embedded software failure
 Hybrid Systems: From Models to Code Tom Henzinger UC Berkeley NSF UC Berkeley: Chess Vanderbilt University: ISIS University of Memphis: MSI Foundations of Hybrid and Embedded Software Systems French Guyana,
Hybrid Systems: From Models to Code Tom Henzinger UC Berkeley NSF UC Berkeley: Chess Vanderbilt University: ISIS University of Memphis: MSI Foundations of Hybrid and Embedded Software Systems French Guyana,
VSI Labs The Build Up of Automated Driving
 VSI Labs The Build Up of Automated Driving October - 2017 Agenda Opening Remarks Introduction and Background Customers Solutions VSI Labs Some Industry Content Opening Remarks Automated vehicle systems
VSI Labs The Build Up of Automated Driving October - 2017 Agenda Opening Remarks Introduction and Background Customers Solutions VSI Labs Some Industry Content Opening Remarks Automated vehicle systems
Intelligent Agents & Search Problem Formulation. AIMA, Chapters 2,
 Intelligent Agents & Search Problem Formulation AIMA, Chapters 2, 3.1-3.2 Outline for today s lecture Intelligent Agents (AIMA 2.1-2) Task Environments Formulating Search Problems CIS 421/521 - Intro to
Intelligent Agents & Search Problem Formulation AIMA, Chapters 2, 3.1-3.2 Outline for today s lecture Intelligent Agents (AIMA 2.1-2) Task Environments Formulating Search Problems CIS 421/521 - Intro to
Agent. Pengju Ren. Institute of Artificial Intelligence and Robotics
 Agent Pengju Ren Institute of Artificial Intelligence and Robotics pengjuren@xjtu.edu.cn 1 Review: What is AI? Artificial intelligence (AI) is intelligence exhibited by machines. In computer science, the
Agent Pengju Ren Institute of Artificial Intelligence and Robotics pengjuren@xjtu.edu.cn 1 Review: What is AI? Artificial intelligence (AI) is intelligence exhibited by machines. In computer science, the
Supervisory Control for Cost-Effective Redistribution of Robotic Swarms
 Supervisory Control for Cost-Effective Redistribution of Robotic Swarms Ruikun Luo Department of Mechaincal Engineering College of Engineering Carnegie Mellon University Pittsburgh, Pennsylvania 11 Email:
Supervisory Control for Cost-Effective Redistribution of Robotic Swarms Ruikun Luo Department of Mechaincal Engineering College of Engineering Carnegie Mellon University Pittsburgh, Pennsylvania 11 Email:
Verification and Validation for Safety in Robots Kerstin Eder
 Verification and Validation for Safety in Robots Kerstin Eder Design Automation and Verification Trustworthy Systems Laboratory Verification and Validation for Safety in Robots, Bristol Robotics Laboratory
Verification and Validation for Safety in Robots Kerstin Eder Design Automation and Verification Trustworthy Systems Laboratory Verification and Validation for Safety in Robots, Bristol Robotics Laboratory
Application of Evolutionary Algorithms for Multi-objective Optimization in VLSI and Embedded Systems
 Application of Evolutionary Algorithms for Multi-objective Optimization in VLSI and Embedded Systems M.C. Bhuvaneswari Editor Application of Evolutionary Algorithms for Multi-objective Optimization in
Application of Evolutionary Algorithms for Multi-objective Optimization in VLSI and Embedded Systems M.C. Bhuvaneswari Editor Application of Evolutionary Algorithms for Multi-objective Optimization in
STPA FOR LINAC4 AVAILABILITY REQUIREMENTS. A. Apollonio, R. Schmidt 4 th European STAMP Workshop, Zurich, 2016
 STPA FOR LINAC4 AVAILABILITY REQUIREMENTS A. Apollonio, R. Schmidt 4 th European STAMP Workshop, Zurich, 2016 LHC colliding particle beams at very high energy 26.8 km Circumference LHC Accelerator (100
STPA FOR LINAC4 AVAILABILITY REQUIREMENTS A. Apollonio, R. Schmidt 4 th European STAMP Workshop, Zurich, 2016 LHC colliding particle beams at very high energy 26.8 km Circumference LHC Accelerator (100
Cyber-Physical Systems Design: Foundations, Methods, and Integrated Tool Chains.
 Cyber-Physical Systems Design: Foundations, Methods, and Integrated Tool Chains John.Fitzgerald@ncl.ac.uk Carl Gamble, Peter Gorm Larsen, Ken Pierce, Jim Woodcock 1 2008-2012: Industry deployment of advanced
Cyber-Physical Systems Design: Foundations, Methods, and Integrated Tool Chains John.Fitzgerald@ncl.ac.uk Carl Gamble, Peter Gorm Larsen, Ken Pierce, Jim Woodcock 1 2008-2012: Industry deployment of advanced
David Howarth. Business Development Manager Americas
 David Howarth Business Development Manager Americas David Howarth IPG Automotive USA, Inc. Business Development Manager Americas david.howarth@ipg-automotive.com ni.com Testing Automated Driving Functions
David Howarth Business Development Manager Americas David Howarth IPG Automotive USA, Inc. Business Development Manager Americas david.howarth@ipg-automotive.com ni.com Testing Automated Driving Functions
A Roadmap for Connected & Autonomous Vehicles. David Skipp Ford Motor Company
 A Roadmap for Connected & Autonomous Vehicles David Skipp Ford Motor Company ! Why does an Autonomous Vehicle need a roadmap? Where might the roadmap take us? What should we focus on next? Why does an
A Roadmap for Connected & Autonomous Vehicles David Skipp Ford Motor Company ! Why does an Autonomous Vehicle need a roadmap? Where might the roadmap take us? What should we focus on next? Why does an
Hardware-in-loop Electronic Throttle System Based On Simulink Ning Chen 1,a,Pinchang Zhu 1,b
 Applied Mechanics and Materials Online: 2011-10-24 ISSN: 1662-7482, Vols. 128-129, pp 898-903 doi:10.4028/www.scientific.net/amm.128-129.898 2012 Trans Tech Publications, Switzerland Hardware-in-loop Electronic
Applied Mechanics and Materials Online: 2011-10-24 ISSN: 1662-7482, Vols. 128-129, pp 898-903 doi:10.4028/www.scientific.net/amm.128-129.898 2012 Trans Tech Publications, Switzerland Hardware-in-loop Electronic
P1.4. Light has to go where it is needed: Future Light Based Driver Assistance Systems
 Light has to go where it is needed: Future Light Based Driver Assistance Systems Thomas Könning¹, Christian Amsel¹, Ingo Hoffmann² ¹ Hella KGaA Hueck & Co., Lippstadt, Germany ² Hella-Aglaia Mobile Vision
Light has to go where it is needed: Future Light Based Driver Assistance Systems Thomas Könning¹, Christian Amsel¹, Ingo Hoffmann² ¹ Hella KGaA Hueck & Co., Lippstadt, Germany ² Hella-Aglaia Mobile Vision
Development & Simulation of a Test Environment for Vehicle Dynamics a Virtual Test Track Layout.
 Development & Simulation of a Test Environment for Vehicle Dynamics a Virtual Test Track Layout. PhD.C. -Eng. Kmeid Saad 1 1 Introduction... 2 2 Vehicle Dynamic Libraries... 3 3 Virtual Driver... 3 4 ROAD...
Development & Simulation of a Test Environment for Vehicle Dynamics a Virtual Test Track Layout. PhD.C. -Eng. Kmeid Saad 1 1 Introduction... 2 2 Vehicle Dynamic Libraries... 3 3 Virtual Driver... 3 4 ROAD...
Experimental Resilience Assessment of An Open-Source Driving Agent
 Experimental Resilience Assessment of An Open-Source Driving Agent Abu Hasnat Mohammad Rubaiyat, Yongming Qin, Homa Alemzadeh Department of Electrical and Computer Engineering, University of Virginia {ar3fx,
Experimental Resilience Assessment of An Open-Source Driving Agent Abu Hasnat Mohammad Rubaiyat, Yongming Qin, Homa Alemzadeh Department of Electrical and Computer Engineering, University of Virginia {ar3fx,
Prototyping Automotive Cyber- Physical Systems
 Prototyping Automotive Cyber- Physical Systems Sebastian Osswald Technische Universität München Boltzmannstr. 15 Garching b. München, Germany osswald@ftm.mw.tum.de Stephan Matz Technische Universität München
Prototyping Automotive Cyber- Physical Systems Sebastian Osswald Technische Universität München Boltzmannstr. 15 Garching b. München, Germany osswald@ftm.mw.tum.de Stephan Matz Technische Universität München
Honda R&D Americas, Inc.
 Honda R&D Americas, Inc. Topics Honda s view on ITS and V2X Activity Honda-lead V2I Message Set Development Status Challenges Topics Honda s view on ITS and V2X Activity Honda-lead V2I Message Set Standard
Honda R&D Americas, Inc. Topics Honda s view on ITS and V2X Activity Honda-lead V2I Message Set Development Status Challenges Topics Honda s view on ITS and V2X Activity Honda-lead V2I Message Set Standard
Automating a Solution for Optimum PTP Deployment
 Automating a Solution for Optimum PTP Deployment ITSF 2015 David O Connor Bridge Worx in Sync Sync Architect V4: Sync planning & diagnostic tool. Evaluates physical layer synchronisation distribution by
Automating a Solution for Optimum PTP Deployment ITSF 2015 David O Connor Bridge Worx in Sync Sync Architect V4: Sync planning & diagnostic tool. Evaluates physical layer synchronisation distribution by
CALL FOR PAPERS. embedded world Conference. -Embedded Intelligence- embedded world Conference Nürnberg, Germany
 13579 CALL FOR PAPERS embedded world Conference -Embedded Intelligence- embedded world Conference 26.-28.2.2019 Nürnberg, Germany www.embedded-world.eu IMPRESSIONS 2018 NuernbergMesse/Uwe Niklas embedded
13579 CALL FOR PAPERS embedded world Conference -Embedded Intelligence- embedded world Conference 26.-28.2.2019 Nürnberg, Germany www.embedded-world.eu IMPRESSIONS 2018 NuernbergMesse/Uwe Niklas embedded
Automotive Needs and Expectations towards Next Generation Driving Simulation
 Automotive Needs and Expectations towards Next Generation Driving Simulation Dr. Hans-Peter Schöner - Insight fromoutside -Consulting - Senior Automotive Expert, Driving Simulation Association September
Automotive Needs and Expectations towards Next Generation Driving Simulation Dr. Hans-Peter Schöner - Insight fromoutside -Consulting - Senior Automotive Expert, Driving Simulation Association September
DISTRIBUTION NETWORK RECONFIGURATION FOR LOSS MINIMISATION USING DIFFERENTIAL EVOLUTION ALGORITHM
 DISTRIBUTION NETWORK RECONFIGURATION FOR LOSS MINIMISATION USING DIFFERENTIAL EVOLUTION ALGORITHM K. Sureshkumar 1 and P. Vijayakumar 2 1 Department of Electrical and Electronics Engineering, Velammal
DISTRIBUTION NETWORK RECONFIGURATION FOR LOSS MINIMISATION USING DIFFERENTIAL EVOLUTION ALGORITHM K. Sureshkumar 1 and P. Vijayakumar 2 1 Department of Electrical and Electronics Engineering, Velammal
The SeMiFOT project and other Swedish FOT Activities
 The SeMiFOT project and other Swedish FOT Activities First name: Trent Last name: Victor SAFER 25/09/08, First Stakeholder Meeting, Brussels Outline 1. Background SAFER 2. Background FOT & NDS 3. SeMiFOT
The SeMiFOT project and other Swedish FOT Activities First name: Trent Last name: Victor SAFER 25/09/08, First Stakeholder Meeting, Brussels Outline 1. Background SAFER 2. Background FOT & NDS 3. SeMiFOT
Closed-Loop Transportation Simulation. Outlines
 Closed-Loop Transportation Simulation Deyang Zhao Mentor: Unnati Ojha PI: Dr. Mo-Yuen Chow Aug. 4, 2010 Outlines 1 Project Backgrounds 2 Objectives 3 Hardware & Software 4 5 Conclusions 1 Project Background
Closed-Loop Transportation Simulation Deyang Zhao Mentor: Unnati Ojha PI: Dr. Mo-Yuen Chow Aug. 4, 2010 Outlines 1 Project Backgrounds 2 Objectives 3 Hardware & Software 4 5 Conclusions 1 Project Background
Applications of Millimeter-Wave Sensors in ITS
 Applications of Millimeter-Wave Sensors in ITS by Shigeaki Nishikawa* and Hiroshi Endo* There is considerable public and private support for intelligent transport systems ABSTRACT (ITS), which promise
Applications of Millimeter-Wave Sensors in ITS by Shigeaki Nishikawa* and Hiroshi Endo* There is considerable public and private support for intelligent transport systems ABSTRACT (ITS), which promise