Mindstorms NXT. mindstorms.lego.com
|
|
|
- Beverly Crawford
- 6 years ago
- Views:
Transcription
1 Mindstorms NXT mindstorms.lego.com
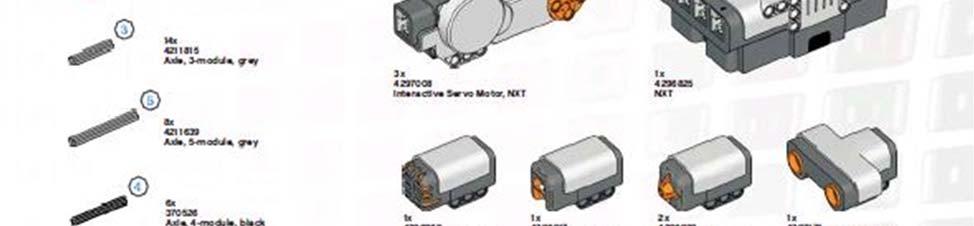
2 A3B99RO Robots: course organization At the beginning of the semester the students are divided into small teams (2 to 3 students). Each team uses the basic set of the LEGO Mindstorms Education 9797, the set of the technical parts 9648 or 9695 (additional passive components), the network adapter 9833 (see Fig. 1) and gyroskopic senzor. The teams design and complete the mobile robot with implemented control and program it to fulfill the specified and well-revisable tasks. Eventually, the teams prepare for the final competition with their robots directly fighting the opponents in activities attractive for broad audience. Figure 1 Basic set of LEGO Mindstorms Education 9797, set of technical parts 9648 and the network adapter 9833


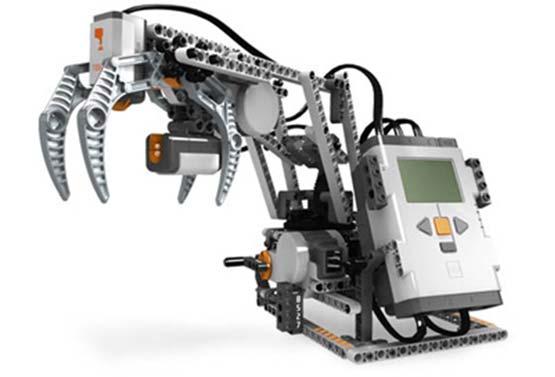
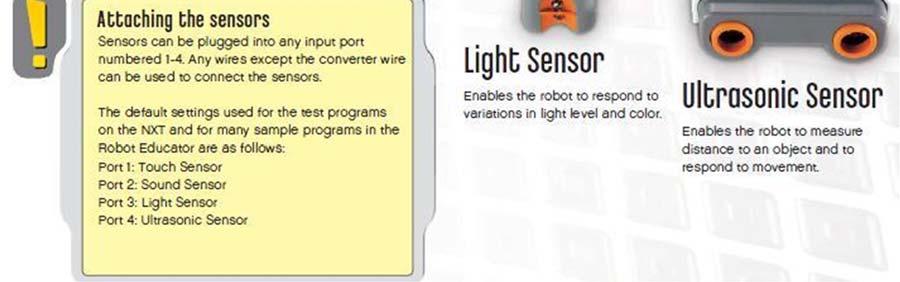
3 An essential element of the set LEGO Mindstorms Education 9797 and at the same time the brain of the robot is the central control unit known as LEGO NXT Intelligent Brick (see Figure 2) with a matrix display 100 x 64 pixels, 4 input ports for connection of the sensors, 3 output ports for connection of the motors, a speaker with 8kHz sampling frequency, having a possibility of Bluetooth wireless communications or an ability connecting to a USB 2.0 port. The intelligent brick and connected devices can be tested and partly controlled with the help of 4 buttons. Up to 3 servomotors can be connected to the LEGO NXT Intelligent brick which can be used as sensors for rotational speed measurement as well. The touch sensor, the light sensor (giving the robot an ability to see by measuring the intensity of the light and even recognizing different colors), the sound sensor or ultrasonic sensors (enabling the robot an orientation in the space, to find obstacles and to determine the distance from them) can be connected as well. Figure 2 Intelligent LEGO NXT brick and connected sensors


 Loudspeaker with")
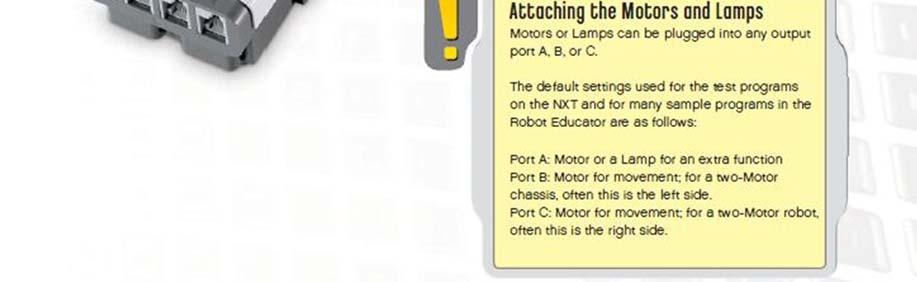
4 Intelligent LEGO NXT brick Matrix display 100 x 64 pixels USB 2.0 port Bluetooth wireless communications 4 input ports for connection of the sensors (1, 2, 3, 4) 3 output ports for connection of the motors (A, B, C) Loudspeaker with 8kHz sampling frequency
5 NXT Brick Features 64K RAM, 256K Flash 32-bit ARM7 microcontroller 100 x 64 pixel LCD graphical display Sound channel with 8-bit resolution Bluetooth radio Stores multiple programs Programs selectable using buttons




6 Ideas youtube.com...



7 4 sensor inputs 3 motor outputs Programmable Brick
8



9



10
11 Purchasing NXT Kits Two options (same price; $250/kit) Standard commercial kit Lego Education kit Advantages of education kit Includes rechargeable battery ($50 value) Plastic box superior to cardboard Extra touch sensor (2 total) Standard commercial kit Includes NXT-G visual language


12 Interactive servomotor may be used also as speedometer




13




14 Touch sensor robot get touch




15 Ultrasonic sensor enabling the robot an orientation in the space, to find obstacles and to determine the distance from them






16 Light sensor giving the robot an ability to see by measuring the intensity of the light and even recognizing different colors




17 Acoustic sensor robot may to hear



18 NXT Non-standard sensors: HiTechnic.com Compass, Accellerometer, Gyroscope, Color, IRSeeker, 18
19 Programming languages NXT-G, NXC lejos NXJ


20 LEGO Digital Designer ldd.lego.com 20


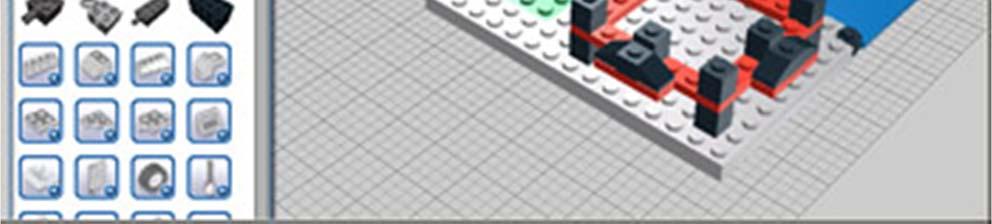
21 LEGO Digital Designer


22 Programming LEGO robots: 1. NXT-G The programming language was named according to the programming language used by the LabVIEW program, developed by National Instruments, which is called only G. Abbreviation G comes from the fact that the programming language is graphical. Programs written in the NXT-G are thus built up of graphic blocks, with set up properties and subsequence, connected together. NXT-G is a joined product of LEGO and National Instruments and it is the basic programming tool for the LEGO MINDSTORMS NXT. The emphasis of the NXT-G is put on intuitiveness and simplicity of development environment including the programming process so that it can be used by primary school pupils with little experience in programming.



23 2. NXC This text language derived from C language runs in the BricxCC on the standard firmware LEGO Mindstorms. It is very comfortable for those who want to program in both the NXT-G and the NXC because they do not need to upload new firmware after each change in programming environment. Working with the language abbreviating the phrase Not Exactly C is very comfortable and a programmer understanding at least the basics in C language becomes quickly familiar with the environment due to the almost identical semantics. Another advantage is that it is a freeware application. A disadvantage consists in complicated debugging of the programs. Unlike the NXT-G it is a purely textual programming without any graphics.
24 3. LeJOS-NXJ - The programming language distributed by Sourceforge is free and is available for Windows, Linux and MAC OS. Due to widespread expansion and knowledge of Java many users chose the LEGO MINDSTORMS LeJOS NXJ with its extensive libraries, which support interesting functions of the robot. The disadvantage is the necessity to change the firmware NXT which includes Java Virtual Machine replacing the standard LEGO firmware. LEGO firmware may be loaded into the NXT brick back using the LEGO software. It depends on the students if they use one of recommended programming languages or use other ones (e.g. MATLAB toolbox developed at the University of Aachen (a product for users accustomed to programming in Matlab), RobotC (programming language based on C programming language), LeJOS OSEK (programming in ANSI C / C + +), or another one).
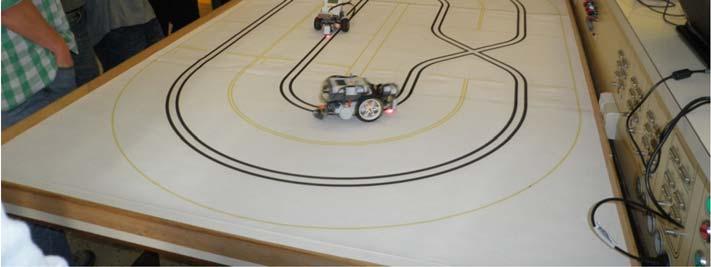
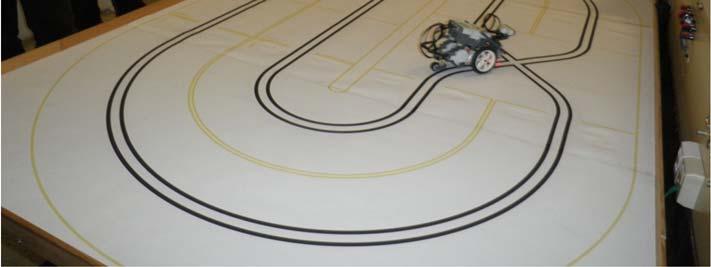
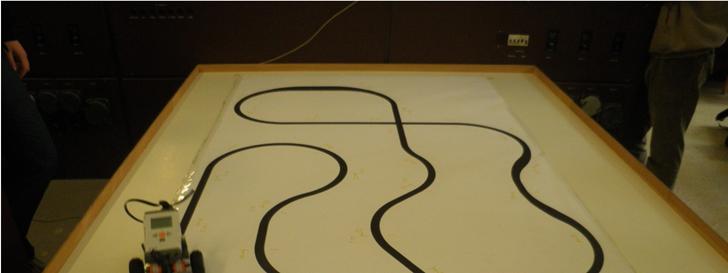
25 The tasks solved in the academic year 2009/10 In the academic year 2009/10 the students solved two tasks: A) Follow the line the aim was to build and program a robot that would independently, without any further assistance (e.g. control using voice, Bluetooth or other communication channels), pass along the black line marked on the mat as quickly as possible and stop at its end. The students do not know the path in advance, they know only the basic parameters of the runway and the total length of the line that is approximately 10 m. The line may be arbitrarily extended not crossing itself with a minimum curve radius 20 cm.








26



27


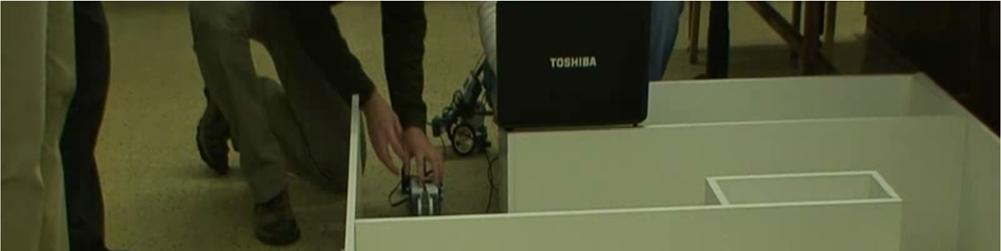
28 B) Labyrinth the aim of the second task was to build and program a robot that would pass through the maze from its beginning to its end as quickly as possible The minimum distance between any two maze walls was about 40 cm. All maze walls were straight-line, 28 cm high, absent from any unforeseen bends and perpendicular to the bottom, i.e. there were no inclined walls. The total size of the maze was 330 x 160 cm

29
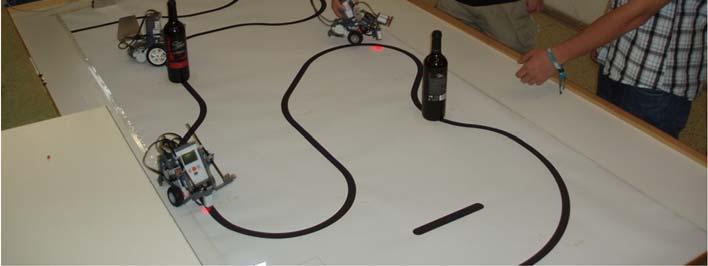
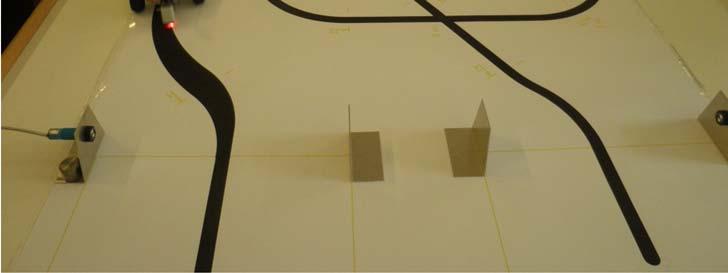
30 The tasks solved in the academic year 2010/11 In the academic year 2010/11 the students solved two different tasks: A) Avoiding objects while following the line the aim was to build and program a robot that would pass along the black line marked on the paper board from the starting area to the finishing area as quickly as possible and stop at its end while avoiding obstacles (even touching them) placed anywhere on the line (see Fig. 8). The students again do not know the path in advance, they know only the basic parameters of the runway and the total length of the line that is between 1 and 10 m. The line may be arbitrarily extended not crossing itself with a minimum curve radius 20 cm.







31
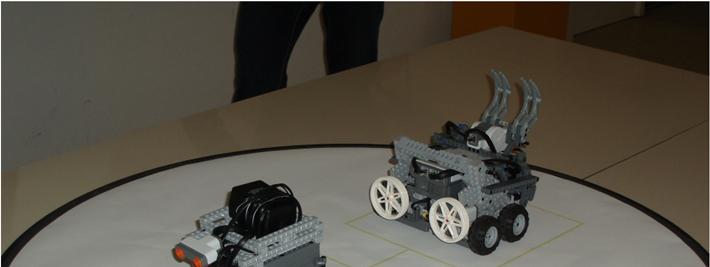
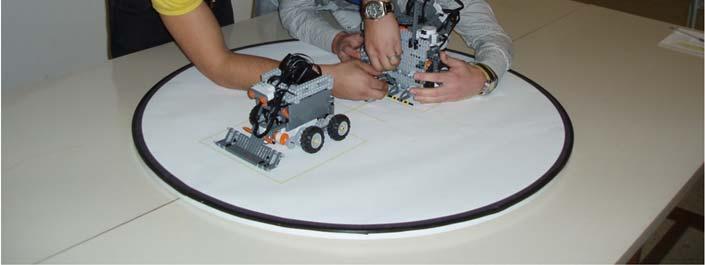
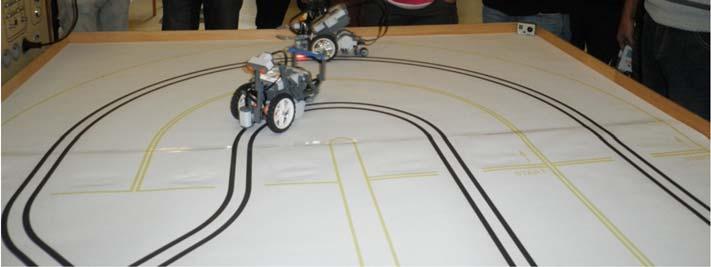
32 B) Sumo the aim was to build and program a robot that would take part in the robotic wrestling tournament. A couple of opponents is competing on a circle playground (see Fig. 9). The task of the robot is to push the opponent out of the playground without leaving it itself. As soon as one opponent touches by any part of his body any place out of the playground he looses. A robot also looses if any of his parts falls down and is subsequently pushed out or the part touches the area outside the playground. The ground plan of the robot should fit in a square with the edge 25 cm, his height is not limited. After starting the match the robot may arbitrarily change his size and shape and turn over. The maximum weight of the robot is 1,5 kg. The playground is a circle laminated plate 1 m in diameter and the height of 18 mm that is circumscribed by a black line 2 cm wide. The rest of the circle is white. The spots for initial placement of the robot before starting the match are marked. Before starting the match the opponents are placed on the playground oriented with their backs each to another, each in the distance 10 cm from the middle of the playground. After a tworound competition in the groups of 6 teams competing each to the other best eleven teams advanced to the final contest.






33
34 The tasks solved in the academic year 2011/12 Project 1 - Following line with intersection The aim of the task is to build and program a robot that will independently, without any further assistance (control using voice, Bluetooth or other communication channels is not allowed), pass two laps along a marked track without crashing into the second competing robot..




35

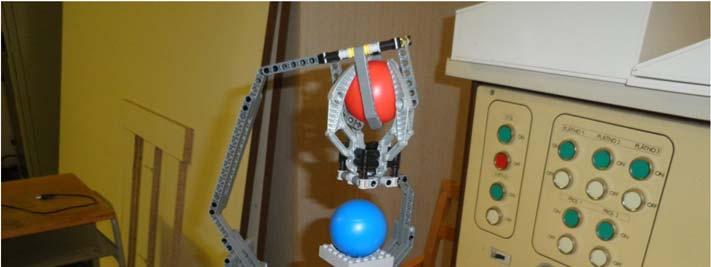
36 Project 2 Balancing with the ball The goal of the task is to make and program the robot with a platform to independently, without any further assistance (e.g. control using voice, Bluetooth or other communication channels) transport the ball placed on the platform as quickly as possible there and back on a non-straight path. The ball must neither fall down from the platform nor touch any other part of the robot.






37








38
39 The tasks solved in the academic year 2012/13 Project 1 Following line with intersection The aim of the task is to build and program a robot that will independently, without any further assistance (control using voice, Bluetooth or other communication channels is not allowed), pass two laps along a marked track without crashing into the second competing robot.






40
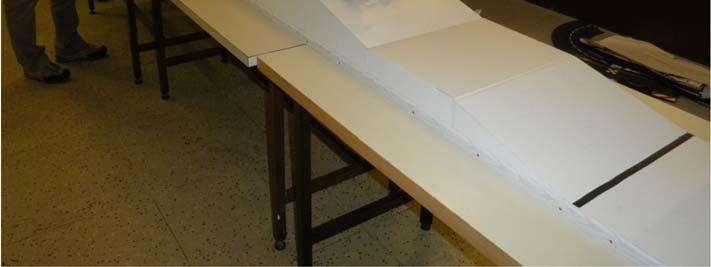
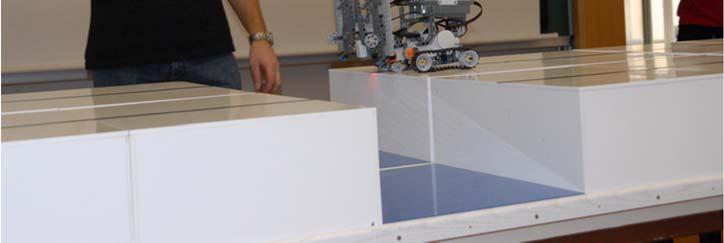
41 Project 2 Mobile bridge The aim of the task is to build and program a robot that will independently, without any further assistance (control using voice, Bluetooth or other communication channels is not allowed), driving in a straight line, found the "river bed" (hole-trench across the width of the track) through which puts mobile bridge crosses over it the other way, mobile pouches and a bridge in the shortest time with him reached the target.
42






43



44 Introduction to NXTG Programming Please go through Getting Started and Software Overview



45 First NXT program: Go forward for 2 sec. and stop Let s name the program first Click on Go >> button You ll see a programming palette (canvas)




46
47


48
49
50

51

52
53
54

 Click")

55 First NXT program using SB1: Go forward for 2 sec. and stop (2/3) Click on Move button Drag and drop the move block to the canvas
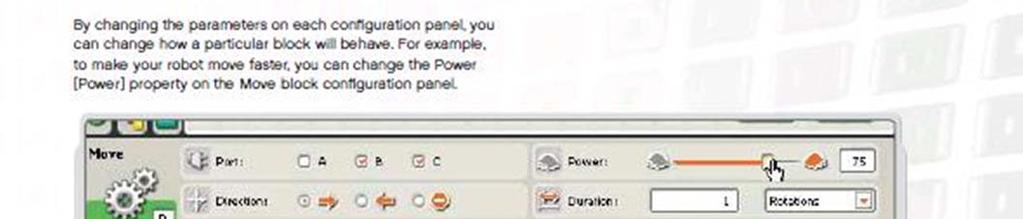
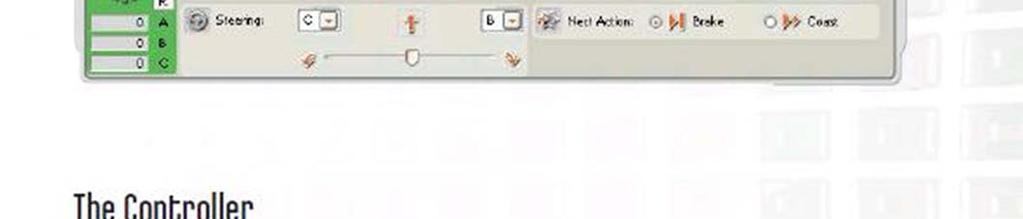
56 First NXT program using SB2: Go forward for 2 sec. and stop (3/3) Change parameters for the Move Port Direction Steering Power Duration Next Action Block Configuration Panel




57 How to run your first program (1/2)
")
58 How to run your 1 st program (2/2) If Found New Hardware pops up, just follow the instruction Click on Download button Recommended to un-plug the cable from the Bot Press the orange button 4 times (Turn on, My files, Software files, Run your program entitled go2stop)
59 How to rerun the program Check the program name on the LCD Press the orange button just once again
60 How to stop the program Gray button

61 First NXT Program: Go forward for 2 sec. and stop (Review)
62 Do not forget: Save your programs Meaningful file (program) names Use comments
63 2 nd Program: ForwardBack 1. Go Forward 2 rotations 2. Wait 3 seconds, then 3. Backward 1 rotation

64 Go Forward 2 rotations, Wait 3 seconds then Backward 1 rotation ForwardBack
65 Making Turns (Instructor Slide) Objective Challenge the students to think about how a turn is made Two ways to turn using one motor (demonstrate by turning with your leg) Demonstrate advantage of turning by spinning Turn left stop Left wheel Right wheel Spin left Face left Left wheel Left wheel Right wheel stop Right wheel
66 Making Turns Turn left stop Left wheel Right wheel Spin left Left wheel Right wheel Face left stop Left wheel Right wheel
67 Turn90Left Using a Motor Block! Forward 2 rotations, Turn Left 90 Degrees, and Forward 2 rotations


68 Forward 2 rotations, Turn Left 90 Degrees, and Forward 2 rotations Turn90Left
69 How do we make to turn 90 Timer? Trial errors Let s do the math!!! degrees? Width of the robot: 14 cm Diameter of the wheel: 5.5 cm Perimeter of the wheel: 5.5 cm x pi = Travel distance needed: (14 x 2 x pi) / 4 = cm 14 cm Number of rotations needed? / =
70 Start-Light Locate the robot in the middle of the ring Wait until the light sensor detects very bright (lantern) light Then start the robot to go forward Stop after a second

71 Start-Light



72
Robotics will be very important for the humanity in the next 10 years and this ebook is an effort to help in this way.
 1.- Introduction 1.1.- Goals Many developers around the world choose lejos, Java for Lego Mindstorm, as the main platform to develop robots with NXT Lego Mindstorm. I consider that this ebook will help
1.- Introduction 1.1.- Goals Many developers around the world choose lejos, Java for Lego Mindstorm, as the main platform to develop robots with NXT Lego Mindstorm. I consider that this ebook will help
Robot Programming Manual
 2 T Program Robot Programming Manual Two sensor, line-following robot design using the LEGO NXT Mindstorm kit. The RoboRAVE International is an annual robotics competition held in Albuquerque, New Mexico,
2 T Program Robot Programming Manual Two sensor, line-following robot design using the LEGO NXT Mindstorm kit. The RoboRAVE International is an annual robotics competition held in Albuquerque, New Mexico,
A Rubik s Cube Solving Robot Using Basic Lego Mindstorms NXT kit
 A Rubik s Cube Solving Robot Using Basic Lego Mindstorms NXT kit Khushboo Tomar Department of Electronics and Communication Engineering, Amity University, Sector-125, Noida 201313 (U.P.) India tomar2khushboo@gmail.com
A Rubik s Cube Solving Robot Using Basic Lego Mindstorms NXT kit Khushboo Tomar Department of Electronics and Communication Engineering, Amity University, Sector-125, Noida 201313 (U.P.) India tomar2khushboo@gmail.com
Instructors. Manual GEARED. After-School Robotics Program By Haley Hanson
 Instructors GEARED UP Manual After-School Robotics Program By Haley Hanson Table of Contents Introduction 3 Before you Start 4 Program Overview 5 Proposed Timeline 6 Itemized Materials List and Sample
Instructors GEARED UP Manual After-School Robotics Program By Haley Hanson Table of Contents Introduction 3 Before you Start 4 Program Overview 5 Proposed Timeline 6 Itemized Materials List and Sample
acknowledgments...xv introduction...xvii 1 LEGO MINDSTORMS NXT 2.0: people, pieces, and potential getting started with the NXT 2.0 set...
 acknowledgments...xv introduction...xvii about this book...xvii part I: introduction to LEGO MINDSTORMS NXT 2.0...xviii part II: building...xviii part III: programming...xviii part IV: projects...xix companion
acknowledgments...xv introduction...xvii about this book...xvii part I: introduction to LEGO MINDSTORMS NXT 2.0...xviii part II: building...xviii part III: programming...xviii part IV: projects...xix companion
Where C= circumference, π = 3.14, and D = diameter EV3 Distance. Developed by Joanna M. Skluzacek Wisconsin 4-H 2016 Page 1
 Instructor Guide Title: Distance the robot will travel based on wheel size Introduction Calculating the distance the robot will travel for each of the duration variables (rotations, degrees, seconds) can
Instructor Guide Title: Distance the robot will travel based on wheel size Introduction Calculating the distance the robot will travel for each of the duration variables (rotations, degrees, seconds) can
Welcome to. NXT Basics. Presenter: Wael Hajj Ali With assistance of: Ammar Shehadeh - Souhaib Alzanki - Samer Abuthaher
 Welcome to NXT Basics Presenter: Wael Hajj Ali With assistance of: Ammar Shehadeh - Souhaib Alzanki - Samer Abuthaher Outline Have you met the Lizard? Introducing the Platform Lego Parts Motors Sensors
Welcome to NXT Basics Presenter: Wael Hajj Ali With assistance of: Ammar Shehadeh - Souhaib Alzanki - Samer Abuthaher Outline Have you met the Lizard? Introducing the Platform Lego Parts Motors Sensors
An Introduction to Programming using the NXT Robot:
 An Introduction to Programming using the NXT Robot: exploring the LEGO MINDSTORMS Common palette. Student Workbook for independent learners and small groups The following tasks have been completed by:
An Introduction to Programming using the NXT Robot: exploring the LEGO MINDSTORMS Common palette. Student Workbook for independent learners and small groups The following tasks have been completed by:
Robotics using Lego Mindstorms EV3 (Intermediate)
") Robotics using Lego Mindstorms EV3 (Intermediate) Facebook.com/roboticsgateway @roboticsgateway Robotics using EV3 Are we ready to go Roboticists? Does each group have at least one laptop? Do you have
Robotics using Lego Mindstorms EV3 (Intermediate) Facebook.com/roboticsgateway @roboticsgateway Robotics using EV3 Are we ready to go Roboticists? Does each group have at least one laptop? Do you have
After Performance Report Of the Robot
 After Performance Report Of the Robot Engineering 112 Spring 2007 Instructor: Dr. Ghada Salama By Mahmudul Alam Tareq Al Maaita Ismail El Ebiary Section- 502 Date: May 2, 2007 Introduction: The report
After Performance Report Of the Robot Engineering 112 Spring 2007 Instructor: Dr. Ghada Salama By Mahmudul Alam Tareq Al Maaita Ismail El Ebiary Section- 502 Date: May 2, 2007 Introduction: The report
Ev3 Robotics Programming 101
 Ev3 Robotics Programming 101 1. EV3 main components and use 2. Programming environment overview 3. Connecting your Robot wirelessly via bluetooth 4. Starting and understanding the EV3 programming environment
Ev3 Robotics Programming 101 1. EV3 main components and use 2. Programming environment overview 3. Connecting your Robot wirelessly via bluetooth 4. Starting and understanding the EV3 programming environment
Artificial Intelligence Planning and Decision Making
 Artificial Intelligence Planning and Decision Making NXT robots co-operating in problem solving authors: Lior Russo, Nir Schwartz, Yakov Levy Introduction: On today s reality the subject of artificial
Artificial Intelligence Planning and Decision Making NXT robots co-operating in problem solving authors: Lior Russo, Nir Schwartz, Yakov Levy Introduction: On today s reality the subject of artificial
Winter 2007/2008 Third Annual IEEE Lego Robot Competition Rules
 Welcome to the Third Annual IEEE Lego Robot Competition. In this document you will find the rules and regulations for the events for the Winter 2007/2008 competition. This competition will take place in
Welcome to the Third Annual IEEE Lego Robot Competition. In this document you will find the rules and regulations for the events for the Winter 2007/2008 competition. This competition will take place in
LEGO Mindstorms Class: Lesson 1
 LEGO Mindstorms Class: Lesson 1 Some Important LEGO Mindstorm Parts Brick Ultrasonic Sensor Light Sensor Touch Sensor Color Sensor Motor Gears Axle Straight Beam Angled Beam Cable 1 The NXT-G Programming
LEGO Mindstorms Class: Lesson 1 Some Important LEGO Mindstorm Parts Brick Ultrasonic Sensor Light Sensor Touch Sensor Color Sensor Motor Gears Axle Straight Beam Angled Beam Cable 1 The NXT-G Programming
Pre-Day Questionnaire
 LEGO Mindstorms Pre-Day Questionnaire Your Age? Please select your age from the options below: a) 11 b) 12 c) 13 d) 14 e) 15 or Older 0 0 0 0 0 11 12 13 14 15&or&Older Good at Problem Solving? Do you think
LEGO Mindstorms Pre-Day Questionnaire Your Age? Please select your age from the options below: a) 11 b) 12 c) 13 d) 14 e) 15 or Older 0 0 0 0 0 11 12 13 14 15&or&Older Good at Problem Solving? Do you think
Smart-M3-Based Robot Interaction in Cyber-Physical Systems
 FRUCT 16, Oulu, Finland October 30, 2014 Smart-M3-Based Robot Interaction in Cyber-Physical Systems Nikolay Teslya *, Sergey Savosin * * St. Petersburg Institute for Informatics and Automation of the Russian
FRUCT 16, Oulu, Finland October 30, 2014 Smart-M3-Based Robot Interaction in Cyber-Physical Systems Nikolay Teslya *, Sergey Savosin * * St. Petersburg Institute for Informatics and Automation of the Russian
understanding sensors
 The LEGO MINDSTORMS EV3 set includes three types of sensors: Touch, Color, and Infrared. You can use these sensors to make your robot respond to its environment. For example, you can program your robot
The LEGO MINDSTORMS EV3 set includes three types of sensors: Touch, Color, and Infrared. You can use these sensors to make your robot respond to its environment. For example, you can program your robot
Nebraska 4-H Robotics and GPS/GIS and SPIRIT Robotics Projects
 Name: Club or School: Robots Knowledge Survey (Pre) Multiple Choice: For each of the following questions, circle the letter of the answer that best answers the question. 1. A robot must be in order to
Name: Club or School: Robots Knowledge Survey (Pre) Multiple Choice: For each of the following questions, circle the letter of the answer that best answers the question. 1. A robot must be in order to
Pre-Activity Quiz. 2 feet forward in a straight line? 1. What is a design challenge? 2. How do you program a robot to move
 Maze Challenge Pre-Activity Quiz 1. What is a design challenge? 2. How do you program a robot to move 2 feet forward in a straight line? 2 Pre-Activity Quiz Answers 1. What is a design challenge? A design
Maze Challenge Pre-Activity Quiz 1. What is a design challenge? 2. How do you program a robot to move 2 feet forward in a straight line? 2 Pre-Activity Quiz Answers 1. What is a design challenge? A design
Building Robots With Lego Mindstorms Nxt
 We have made it easy for you to find a PDF Ebooks without any digging. And by having access to our ebooks online or by storing it on your computer, you have convenient answers with building robots with
We have made it easy for you to find a PDF Ebooks without any digging. And by having access to our ebooks online or by storing it on your computer, you have convenient answers with building robots with
Robofest 2016 BottleSumo
 Robofest 2016 BottleSumo 2016 Kick-off version 12-4-15, V1.1 The Bottle will be placed on this line (Figure 1) An example of BottleSumo Game Initial Configuration, Junior Division 21.6cm (8.5 ) 8 cm 3.8
Robofest 2016 BottleSumo 2016 Kick-off version 12-4-15, V1.1 The Bottle will be placed on this line (Figure 1) An example of BottleSumo Game Initial Configuration, Junior Division 21.6cm (8.5 ) 8 cm 3.8
How Do You Make a Program Wait?
 How Do You Make a Program Wait? How Do You Make a Program Wait? Pre-Quiz 1. What is an algorithm? 2. Can you think of a reason why it might be inconvenient to program your robot to always go a precise
How Do You Make a Program Wait? How Do You Make a Program Wait? Pre-Quiz 1. What is an algorithm? 2. Can you think of a reason why it might be inconvenient to program your robot to always go a precise
Robotics Workshop. for Parents and Teachers. September 27, 2014 Wichita State University College of Engineering. Karen Reynolds
 Robotics Workshop for Parents and Teachers September 27, 2014 Wichita State University College of Engineering Steve Smith Christa McAuliffe Academy ssmith3@usd259.net Karen Reynolds Wichita State University
Robotics Workshop for Parents and Teachers September 27, 2014 Wichita State University College of Engineering Steve Smith Christa McAuliffe Academy ssmith3@usd259.net Karen Reynolds Wichita State University
Some prior experience with building programs in Scratch is assumed. You can find some introductory materials here:
 Robotics 1b Building an mbot Program Some prior experience with building programs in Scratch is assumed. You can find some introductory materials here: http://www.mblock.cc/edu/ The mbot Blocks The mbot
Robotics 1b Building an mbot Program Some prior experience with building programs in Scratch is assumed. You can find some introductory materials here: http://www.mblock.cc/edu/ The mbot Blocks The mbot
VEX Robotics Platform and ROBOTC Software. Introduction
 VEX Robotics Platform and ROBOTC Software Introduction VEX Robotics Platform: Testbed for Learning Programming VEX Structure Subsystem VEX Structure Subsystem forms the base of every robot Contains square
VEX Robotics Platform and ROBOTC Software Introduction VEX Robotics Platform: Testbed for Learning Programming VEX Structure Subsystem VEX Structure Subsystem forms the base of every robot Contains square
Closed-Loop Transportation Simulation. Outlines
 Closed-Loop Transportation Simulation Deyang Zhao Mentor: Unnati Ojha PI: Dr. Mo-Yuen Chow Aug. 4, 2010 Outlines 1 Project Backgrounds 2 Objectives 3 Hardware & Software 4 5 Conclusions 1 Project Background
Closed-Loop Transportation Simulation Deyang Zhao Mentor: Unnati Ojha PI: Dr. Mo-Yuen Chow Aug. 4, 2010 Outlines 1 Project Backgrounds 2 Objectives 3 Hardware & Software 4 5 Conclusions 1 Project Background
Erik Von Burg Mesa Public Schools Gifted and Talented Program Johnson Elementary School
 Erik Von Burg Mesa Public Schools Gifted and Talented Program Johnson Elementary School elvonbur@mpsaz.org Water Sabers (2008)* High Heelers (2009)* Helmeteers (2009)* Cyber Sleuths (2009)* LEGO All Stars
Erik Von Burg Mesa Public Schools Gifted and Talented Program Johnson Elementary School elvonbur@mpsaz.org Water Sabers (2008)* High Heelers (2009)* Helmeteers (2009)* Cyber Sleuths (2009)* LEGO All Stars
Chapter 1. Robots and Programs
 Chapter 1 Robots and Programs 1 2 Chapter 1 Robots and Programs Introduction Without a program, a robot is just an assembly of electronic and mechanical components. This book shows you how to give it a
Chapter 1 Robots and Programs 1 2 Chapter 1 Robots and Programs Introduction Without a program, a robot is just an assembly of electronic and mechanical components. This book shows you how to give it a
The light sensor, rotation sensor, and motors may all be monitored using the view function on the RCX.
 Review the following material on sensors. Discuss how you might use each of these sensors. When you have completed reading through this material, build a robot of your choosing that has 2 motors (connected
Review the following material on sensors. Discuss how you might use each of these sensors. When you have completed reading through this material, build a robot of your choosing that has 2 motors (connected
Inspiring Creative Fun Ysbrydoledig Creadigol Hwyl. LEGO Bowling Workbook
 Inspiring Creative Fun Ysbrydoledig Creadigol Hwyl LEGO Bowling Workbook Robots are devices, sometimes they run basic instructions via electric circuitry or on most occasions they can be programmable.
Inspiring Creative Fun Ysbrydoledig Creadigol Hwyl LEGO Bowling Workbook Robots are devices, sometimes they run basic instructions via electric circuitry or on most occasions they can be programmable.
Your EdVenture into Robotics 10 Lesson plans
 Your EdVenture into Robotics 10 Lesson plans Activity sheets and Worksheets Find Edison Robot @ Search: Edison Robot Call 800.962.4463 or email custserv@ Lesson 1 Worksheet 1.1 Meet Edison Edison is a
Your EdVenture into Robotics 10 Lesson plans Activity sheets and Worksheets Find Edison Robot @ Search: Edison Robot Call 800.962.4463 or email custserv@ Lesson 1 Worksheet 1.1 Meet Edison Edison is a
Robotic teaching for Malaysian gifted enrichment program
 Available online at www.sciencedirect.com Procedia Social and Behavioral Sciences 15 (2011) 2528 2532 WCES-2011 Robotic teaching for Malaysian gifted enrichment program Rizauddin Ramli a *, Melor Md Yunus
Available online at www.sciencedirect.com Procedia Social and Behavioral Sciences 15 (2011) 2528 2532 WCES-2011 Robotic teaching for Malaysian gifted enrichment program Rizauddin Ramli a *, Melor Md Yunus
I.1 Smart Machines. Unit Overview:
 I Smart Machines I.1 Smart Machines Unit Overview: This unit introduces students to Sensors and Programming with VEX IQ. VEX IQ Sensors allow for autonomous and hybrid control of VEX IQ robots and other
I Smart Machines I.1 Smart Machines Unit Overview: This unit introduces students to Sensors and Programming with VEX IQ. VEX IQ Sensors allow for autonomous and hybrid control of VEX IQ robots and other
Let There Be Light. Opening Files. Deleting National Technology and Science Press
 Let There Be Light 2 Better to light a candle than to curse the darkness. Chinese Proverb The Hello World program demonstrates only the output aspect of a computer program. Now let s write a program that
Let There Be Light 2 Better to light a candle than to curse the darkness. Chinese Proverb The Hello World program demonstrates only the output aspect of a computer program. Now let s write a program that
The use of programmable robots in the education of programming
 Proceedings of the 7 th International Conference on Applied Informatics Eger, Hungary, January 28 31, 2007. Vol. 2. pp. 29 36. The use of programmable robots in the education of programming Zoltán Istenes
Proceedings of the 7 th International Conference on Applied Informatics Eger, Hungary, January 28 31, 2007. Vol. 2. pp. 29 36. The use of programmable robots in the education of programming Zoltán Istenes
Pre-Activity Quiz. building a robot to fight another robot by trying to push it out of a ring? in the competition? the way when racing?
 Sumobot - RaceCar Challenge Pre-Activity Quiz 1. What must you keep in mind when building a robot to fight another robot by trying to push it out of a ring? 2. How can you use gears to your advantage in
Sumobot - RaceCar Challenge Pre-Activity Quiz 1. What must you keep in mind when building a robot to fight another robot by trying to push it out of a ring? 2. How can you use gears to your advantage in
Downloading a ROBOTC Sample Program
 Downloading a ROBOTC Sample Program This document is a guide for downloading and running programs on the VEX Cortex using ROBOTC for Cortex 2.3 BETA. It is broken into four sections: Prerequisites, Downloading
Downloading a ROBOTC Sample Program This document is a guide for downloading and running programs on the VEX Cortex using ROBOTC for Cortex 2.3 BETA. It is broken into four sections: Prerequisites, Downloading
Activity Template. Subject Area(s): Science and Technology Activity Title: Header. Grade Level: 9-12 Time Required: Group Size:
: Science and Technology Activity Title: Header. Grade Level: 9-12 Time Required: Group Size:") Activity Template Subject Area(s): Science and Technology Activity Title: What s In a Name? Header Image 1 ADA Description: Picture of a rover with attached pen for writing while performing program. Caption:
Activity Template Subject Area(s): Science and Technology Activity Title: What s In a Name? Header Image 1 ADA Description: Picture of a rover with attached pen for writing while performing program. Caption:
CE215 - Assignment 1 : Dead Reckoning Reg NO:
 CE215 - Assignment 1 : Dead Reckoning Reg NO: 1001348 Abstract: The report aims to determine whether or not a robot can be constructed and controlled in such a way to make it move in a 1*1 meter square.
CE215 - Assignment 1 : Dead Reckoning Reg NO: 1001348 Abstract: The report aims to determine whether or not a robot can be constructed and controlled in such a way to make it move in a 1*1 meter square.
COSC343: Artificial Intelligence
 COSC343: Artificial Intelligence Lecture 2: Starting from scratch: robotics and embodied AI Alistair Knott Dept. of Computer Science, University of Otago Alistair Knott (Otago) COSC343 Lecture 2 1 / 29
COSC343: Artificial Intelligence Lecture 2: Starting from scratch: robotics and embodied AI Alistair Knott Dept. of Computer Science, University of Otago Alistair Knott (Otago) COSC343 Lecture 2 1 / 29
Sample Pages. Classroom Activities for the Busy Teacher: NXT. 2 nd Edition. Classroom Activities for the Busy Teacher: NXT -
 Classroom Activities for the Busy Teacher: NXT 2 nd Edition Table of Contents Chapter 1: Introduction... 1 Chapter 2: What is a robot?... 5 Chapter 3: Flowcharting... 11 Chapter 4: DomaBot Basics... 15
Classroom Activities for the Busy Teacher: NXT 2 nd Edition Table of Contents Chapter 1: Introduction... 1 Chapter 2: What is a robot?... 5 Chapter 3: Flowcharting... 11 Chapter 4: DomaBot Basics... 15
Western Kansas Lego Robotics Competition April 16, 2018 Fort Hays State University
 Western Kansas Lego Robotics Competition April 16, 2018 Fort Hays State University WELCOME FHSU is hosting our 12 th annual Lego robotics competition. The competition is open to all area middle school
Western Kansas Lego Robotics Competition April 16, 2018 Fort Hays State University WELCOME FHSU is hosting our 12 th annual Lego robotics competition. The competition is open to all area middle school
RoboCup Sumo Workshop. Margaux Edwards July 2018
 RoboCup Sumo Workshop Margaux Edwards July 2018 Plan for today: The Challenge Designing your Robot Programming your Robot Ultrasonic Sensor Light/Colour Sensor Competition Time! The Challenge: What is
RoboCup Sumo Workshop Margaux Edwards July 2018 Plan for today: The Challenge Designing your Robot Programming your Robot Ultrasonic Sensor Light/Colour Sensor Competition Time! The Challenge: What is
Team Description Paper
 Team Description Paper Sebastián Bejos, Fernanda Beltrán, Ivan Feliciano, Giovanni Guerrero, Moroni Silverio 1 Abstract We describe the design of the hardware and software components, as well as the algorithms
Team Description Paper Sebastián Bejos, Fernanda Beltrán, Ivan Feliciano, Giovanni Guerrero, Moroni Silverio 1 Abstract We describe the design of the hardware and software components, as well as the algorithms
1 Lab + Hwk 4: Introduction to the e-puck Robot
 1 Lab + Hwk 4: Introduction to the e-puck Robot This laboratory requires the following: (The development tools are already installed on the DISAL virtual machine (Ubuntu Linux) in GR B0 01): C development
1 Lab + Hwk 4: Introduction to the e-puck Robot This laboratory requires the following: (The development tools are already installed on the DISAL virtual machine (Ubuntu Linux) in GR B0 01): C development
Lab 8: Introduction to the e-puck Robot
 Lab 8: Introduction to the e-puck Robot This laboratory requires the following equipment: C development tools (gcc, make, etc.) C30 programming tools for the e-puck robot The development tree which is
Lab 8: Introduction to the e-puck Robot This laboratory requires the following equipment: C development tools (gcc, make, etc.) C30 programming tools for the e-puck robot The development tree which is
Introduction to the VEX Robotics Platform and ROBOTC Software
 Introduction to the VEX Robotics Platform and ROBOTC Software Computer Integrated Manufacturing 2013 Project Lead The Way, Inc. VEX Robotics Platform: Testbed for Learning Programming VEX Structure Subsystem
Introduction to the VEX Robotics Platform and ROBOTC Software Computer Integrated Manufacturing 2013 Project Lead The Way, Inc. VEX Robotics Platform: Testbed for Learning Programming VEX Structure Subsystem
Lab book. Exploring Robotics (CORC3303)
") Lab book Exploring Robotics (CORC3303) Dept of Computer and Information Science Brooklyn College of the City University of New York updated: Fall 2011 / Professor Elizabeth Sklar UNIT A Lab, part 1 : Robot
Lab book Exploring Robotics (CORC3303) Dept of Computer and Information Science Brooklyn College of the City University of New York updated: Fall 2011 / Professor Elizabeth Sklar UNIT A Lab, part 1 : Robot
Chapter 14. using data wires
 Chapter 14. using data wires In this fifth part of the book, you ll learn how to use data wires (this chapter), Data Operations blocks (Chapter 15), and variables (Chapter 16) to create more advanced programs
Chapter 14. using data wires In this fifth part of the book, you ll learn how to use data wires (this chapter), Data Operations blocks (Chapter 15), and variables (Chapter 16) to create more advanced programs
FLL Programming Workshop Series
 FLL Programming 2017 Workshop Series 2017 1 Prerequisites & Equipment Required Basic computer skills Assembled EV3 Educational robot or equivalent Computer or Laptop with LEGO Mindstorms software installed
FLL Programming 2017 Workshop Series 2017 1 Prerequisites & Equipment Required Basic computer skills Assembled EV3 Educational robot or equivalent Computer or Laptop with LEGO Mindstorms software installed
e d u c a t i o n Detect Dark Line Objectives Connect Teacher s Notes
 e d u c a t i o n Objectives Learn how to make the robot interact with the environment: Detect a line drawn on the floor by means of its luminosity. Hint You will need a flashlight or other light source
e d u c a t i o n Objectives Learn how to make the robot interact with the environment: Detect a line drawn on the floor by means of its luminosity. Hint You will need a flashlight or other light source
Instructional Technology Center
 Partner Teacher Night March 2017 - Lego WeDo 2.0 What are Lego WeDos? WeDos are lego sets that come with a power source and a motor that allows students to create lego constructions that move like robots.
Partner Teacher Night March 2017 - Lego WeDo 2.0 What are Lego WeDos? WeDos are lego sets that come with a power source and a motor that allows students to create lego constructions that move like robots.
FLL Coaches Clinic Chassis and Attachments. Patrick R. Michaud
 FLL Coaches Clinic Chassis and Attachments Patrick R. Michaud pmichaud@pobox.com Erik Jonsson School of Engineering and Computer Science University of Texas at Dallas September 23, 2017 Presentation Outline
FLL Coaches Clinic Chassis and Attachments Patrick R. Michaud pmichaud@pobox.com Erik Jonsson School of Engineering and Computer Science University of Texas at Dallas September 23, 2017 Presentation Outline
contents in detail PART I GETTING STARTED acknowledgments...xvii
 contents in detail acknowledgments...xvii introduction...xix why this book?...xix is this book for you?...xix how does this book work?...xix the discoveries...xix what to expect in each chapter...xx getting
contents in detail acknowledgments...xvii introduction...xix why this book?...xix is this book for you?...xix how does this book work?...xix the discoveries...xix what to expect in each chapter...xx getting
LEGO Mindstorms EV3 Robotics Instructor Guide. Joanna M. Skluzacek, PhD. Associate Professor. Department of Youth Development
 LEGO Mindstorms EV3 Robotics Instructor Guide Joanna M. Skluzacek, PhD Associate Professor Department of Youth Development University of Wisconsin Extension Introduction to LEGO Mindstorms EV3 developed
LEGO Mindstorms EV3 Robotics Instructor Guide Joanna M. Skluzacek, PhD Associate Professor Department of Youth Development University of Wisconsin Extension Introduction to LEGO Mindstorms EV3 developed
Unit 4: Robot Chassis Construction
 Unit 4: Robot Chassis Construction Unit 4: Teacher s Guide Lesson Overview: Paul s robotic assistant needs to operate in a real environment. The size, scale, and capabilities of the TETRIX materials are
Unit 4: Robot Chassis Construction Unit 4: Teacher s Guide Lesson Overview: Paul s robotic assistant needs to operate in a real environment. The size, scale, and capabilities of the TETRIX materials are
TUTA/IOE/PCU All rights reserved. Printed in Nepal Fax: My First Humanoid Robot An Experience worth Sharing with Freshmen and Sophomore
 64 Journal of the Institute of the Engineering TUTA/IOE/PCU Journal of the Institute of Engineering, Vol. 8, No. 1, pp. 64 70 TUTA/IOE/PCU All rights reserved. Printed in Nepal Fax: 977-1-5525830 My First
64 Journal of the Institute of the Engineering TUTA/IOE/PCU Journal of the Institute of Engineering, Vol. 8, No. 1, pp. 64 70 TUTA/IOE/PCU All rights reserved. Printed in Nepal Fax: 977-1-5525830 My First
Two Hour Robot. Lets build a Robot.
 Lets build a Robot. Our robot will use an ultrasonic sensor and servos to navigate it s way around a maze. We will be making 2 voltage circuits : A 5 Volt for our ultrasonic sensor, sound and lights powered
Lets build a Robot. Our robot will use an ultrasonic sensor and servos to navigate it s way around a maze. We will be making 2 voltage circuits : A 5 Volt for our ultrasonic sensor, sound and lights powered
LEGO MINDSTORMS COMPETITIONS
 LEGO MINDSTORMS COMPETITIONS FIRST LEGO LEAGUE and WORLD ROBOT OLYMPIAD By Sanjay and Arvind Seshan, EV3Lessons.com With information and feedback from Dominic Bruneau (Canada), Nilesh Shah (India), Atul
LEGO MINDSTORMS COMPETITIONS FIRST LEGO LEAGUE and WORLD ROBOT OLYMPIAD By Sanjay and Arvind Seshan, EV3Lessons.com With information and feedback from Dominic Bruneau (Canada), Nilesh Shah (India), Atul
Program Your Robot to Perform a Task
 Youth Explore Trades Skills Description In this activity, students gain hands-on experience with programming a robot to perform tasks. This activity includes seven task challenges. Students will work in
Youth Explore Trades Skills Description In this activity, students gain hands-on experience with programming a robot to perform tasks. This activity includes seven task challenges. Students will work in
BUILDING A COMPETITION ROBOT SESHAN BROTHERS
 BUILDING A COMPETITION ROBOT SESHAN BROTHERS OUR RULES FOR ROBOT DESIGN RULE #1: Take your time to build your base robot before jumping into attachment building and solving missions. RULE #2: If you are
BUILDING A COMPETITION ROBOT SESHAN BROTHERS OUR RULES FOR ROBOT DESIGN RULE #1: Take your time to build your base robot before jumping into attachment building and solving missions. RULE #2: If you are
Deriving Consistency from LEGOs
 Deriving Consistency from LEGOs What we have learned in 6 years of FLL and 7 years of Lego Robotics by Austin and Travis Schuh 1 2006 Austin and Travis Schuh, all rights reserved Objectives Basic Building
Deriving Consistency from LEGOs What we have learned in 6 years of FLL and 7 years of Lego Robotics by Austin and Travis Schuh 1 2006 Austin and Travis Schuh, all rights reserved Objectives Basic Building
EV3 Advanced Topics for FLL
 EV3 Advanced Topics for FLL Jim Keller GRASP Laboratory University of Pennsylvania August 14, 2016 Part 1 of 2 Topics Intro to Line Following Basic concepts Calibrate Calibrate the light sensor Display
EV3 Advanced Topics for FLL Jim Keller GRASP Laboratory University of Pennsylvania August 14, 2016 Part 1 of 2 Topics Intro to Line Following Basic concepts Calibrate Calibrate the light sensor Display
: Robots for Education and Entertainment. Sara Schütz
 8.12.2008: Robots for Education and Entertainment Sara Schütz Table of Contents What means Robot for Education&Entertainment? Educational Robots: The Telebots Project -Introduction -How it works Entertainment
8.12.2008: Robots for Education and Entertainment Sara Schütz Table of Contents What means Robot for Education&Entertainment? Educational Robots: The Telebots Project -Introduction -How it works Entertainment
Hands On Activity: Robotics in the Classroom. Using Lego Mindstorms (Prepared by Connie Gomez and Virgilio Gonzalez)
") Hands On Activity: Robotics in the Classroom Using Lego Mindstorms (Prepared by Connie Gomez and Virgilio Gonzalez) Group Discussion Your concepts of robotics? Your experiences with robots? Your experiences
Hands On Activity: Robotics in the Classroom Using Lego Mindstorms (Prepared by Connie Gomez and Virgilio Gonzalez) Group Discussion Your concepts of robotics? Your experiences with robots? Your experiences
Assembly Guide Robokits India
 Robotic Arm 5 DOF Assembly Guide Robokits India info@robokits.co.in Robokits World http://www.robokitsworld.com http://www.robokitsworld.com Page 1 Overview : 5 DOF Robotic Arm from Robokits is a robotic
Robotic Arm 5 DOF Assembly Guide Robokits India info@robokits.co.in Robokits World http://www.robokitsworld.com http://www.robokitsworld.com Page 1 Overview : 5 DOF Robotic Arm from Robokits is a robotic
2015 Maryland State 4-H LEGO Robotic Challenge
 Trash Talk Utilizing Trash to Power the World 2015 Maryland State 4-H LEGO Robotic Challenge Through Trash Talk, 4-H members involved in robotics will create LEGO robots that complete tasks related to
Trash Talk Utilizing Trash to Power the World 2015 Maryland State 4-H LEGO Robotic Challenge Through Trash Talk, 4-H members involved in robotics will create LEGO robots that complete tasks related to
Studuino Icon Programming Environment Guide
 Studuino Icon Programming Environment Guide Ver 0.9.6 4/17/2014 This manual introduces the Studuino Software environment. As the Studuino programming environment develops, these instructions may be edited
Studuino Icon Programming Environment Guide Ver 0.9.6 4/17/2014 This manual introduces the Studuino Software environment. As the Studuino programming environment develops, these instructions may be edited
Introduction to Robotics Rubrics
 Introduction to Robotics Rubrics Students can evaluate their project work according to the learning goals. Each rubric includes four levels: Bronze, Silver, Gold, and Platinum. The intention is to help
Introduction to Robotics Rubrics Students can evaluate their project work according to the learning goals. Each rubric includes four levels: Bronze, Silver, Gold, and Platinum. The intention is to help
Curriculum Activities for Driving Course Curriculum Sample 1
 Curriculum Activities for Driving Course Curriculum Sample 1 This sample is provided to give you some guidance in developing your own challenges. This mat is meant to serve as an intro to EV3 moves and
Curriculum Activities for Driving Course Curriculum Sample 1 This sample is provided to give you some guidance in developing your own challenges. This mat is meant to serve as an intro to EV3 moves and
1. ASSEMBLING THE PCB 2. FLASH THE ZIP LEDs 3. BUILDING THE WHEELS
 V1.0 :MOVE The Kitronik :MOVE mini for the BBC micro:bit provides an introduction to robotics. The :MOVE mini is a 2 wheeled robot, suitable for both remote control and autonomous operation. A range of
V1.0 :MOVE The Kitronik :MOVE mini for the BBC micro:bit provides an introduction to robotics. The :MOVE mini is a 2 wheeled robot, suitable for both remote control and autonomous operation. A range of
MATERIALS PROVIDED BY SCIENCE & TECH FAIR STAFF AT EVENT:
 PURPOSE: The purpose of the Robotics competition is: 1) Design and create a robot, within the constraints listed below, which competes and wins the Robot competition described in the rules below. 2) The
PURPOSE: The purpose of the Robotics competition is: 1) Design and create a robot, within the constraints listed below, which competes and wins the Robot competition described in the rules below. 2) The
Multi-Robot Cooperative System For Object Detection
 Multi-Robot Cooperative System For Object Detection Duaa Abdel-Fattah Mehiar AL-Khawarizmi international collage Duaa.mehiar@kawarizmi.com Abstract- The present study proposes a multi-agent system based
Multi-Robot Cooperative System For Object Detection Duaa Abdel-Fattah Mehiar AL-Khawarizmi international collage Duaa.mehiar@kawarizmi.com Abstract- The present study proposes a multi-agent system based
Sumo-bot Competition Rules
 Sumo-bot Competition Rules Location: Guadalupe County Agricultural Extension Office, 210 Live Oak, Seguin, TX 78155 Date and Time: December 2, 2017 from 9-2 PM doors open at 9AM Check in and Inspections:
Sumo-bot Competition Rules Location: Guadalupe County Agricultural Extension Office, 210 Live Oak, Seguin, TX 78155 Date and Time: December 2, 2017 from 9-2 PM doors open at 9AM Check in and Inspections:
Automata Depository Model with Autonomous Robots
 Acta Cybernetica 19 (2010) 655 660. Automata Depository Model with Autonomous Robots Zoltán Szabó, Balázs Lájer, and Ágnes Werner-Stark Abstract One of the actual topics on robotis research in the recent
Acta Cybernetica 19 (2010) 655 660. Automata Depository Model with Autonomous Robots Zoltán Szabó, Balázs Lájer, and Ágnes Werner-Stark Abstract One of the actual topics on robotis research in the recent
Vision Ques t. Vision Quest. Use the Vision Sensor to drive your robot in Vision Quest!
 Vision Ques t Vision Quest Use the Vision Sensor to drive your robot in Vision Quest! Seek Discover new hands-on builds and programming opportunities to further your understanding of a subject matter.
Vision Ques t Vision Quest Use the Vision Sensor to drive your robot in Vision Quest! Seek Discover new hands-on builds and programming opportunities to further your understanding of a subject matter.
Robot Olympics: Programming Robots to Perform Tasks in the Real World
 Robot Olympics: Programming Robots to Perform Tasks in the Real World Coranne Lipford Faculty of Computer Science Dalhousie University, Canada lipford@cs.dal.ca Raymond Walsh Faculty of Computer Science
Robot Olympics: Programming Robots to Perform Tasks in the Real World Coranne Lipford Faculty of Computer Science Dalhousie University, Canada lipford@cs.dal.ca Raymond Walsh Faculty of Computer Science
1-11. Mini Sumo Bot. Building Instructions. Fun Projects for your LEGO MINDSTORMS NXT! Home Projects Help Contacts. Building: Program:
 Fun Projects for your LEGO MINDSTORMS NXT! Home Projects Help Contacts Mini Sumo Bot Building: Program: Building Instructions 1-11 Start by building the Castor Bot. Click the picture for building instructions.
Fun Projects for your LEGO MINDSTORMS NXT! Home Projects Help Contacts Mini Sumo Bot Building: Program: Building Instructions 1-11 Start by building the Castor Bot. Click the picture for building instructions.
Robotic Programming. Skills Checklist
 Robotic Programming Skills Checklist Name: Motors Motors Direction Steering Power Duration Complete B & C Forward Straight 75 3 Rotations B & C Forward Straight 100 5 Rotatins B & C Forward Straight 50
Robotic Programming Skills Checklist Name: Motors Motors Direction Steering Power Duration Complete B & C Forward Straight 75 3 Rotations B & C Forward Straight 100 5 Rotatins B & C Forward Straight 50
The Nomenclature and Geometry of LEGO
 The Nomenclature and Geometry of LEGO AN OVERVIEW OF LEGO EV3 MINDSTORMS ELEMENTS AND HOW THEY WORK TOGETHER UPDATED 9/27/2015 Required Stuff Please do not wander the building. Rest Rooms Location. Food
The Nomenclature and Geometry of LEGO AN OVERVIEW OF LEGO EV3 MINDSTORMS ELEMENTS AND HOW THEY WORK TOGETHER UPDATED 9/27/2015 Required Stuff Please do not wander the building. Rest Rooms Location. Food
Positive Promotion: Use the FIRST and FTC logos in a manner that is positive and promotes FIRST.
 You have incredibly creative opportunities in terms of designing your own identity. There are many examples of how teams brand their efforts with websites, incredible team logos on robots, T shirts, hats,
You have incredibly creative opportunities in terms of designing your own identity. There are many examples of how teams brand their efforts with websites, incredible team logos on robots, T shirts, hats,
Getting Started with the micro:bit
 Page 1 of 10 Getting Started with the micro:bit Introduction So you bought this thing called a micro:bit what is it? micro:bit Board DEV-14208 The BBC micro:bit is a pocket-sized computer that lets you
Page 1 of 10 Getting Started with the micro:bit Introduction So you bought this thing called a micro:bit what is it? micro:bit Board DEV-14208 The BBC micro:bit is a pocket-sized computer that lets you
2018 Sumobot Rules. The last tournament takes place in collaboration. Two teams of two robots compete simultaneously.
 2018 Sumobot Rules PRINCIPLE Two robots clash on a circular black ground bordered by a white line: the "Dohyo". If the robot comes out or is pushed off the field, he is considered loosing the inning. The
2018 Sumobot Rules PRINCIPLE Two robots clash on a circular black ground bordered by a white line: the "Dohyo". If the robot comes out or is pushed off the field, he is considered loosing the inning. The
Robotics Engineering DoDEA Career Technology Education Robot Programming
 Robotics Engineering DoDEA Career Technology Education Robot Programming Area Competency G. Robot Programming 1. Introduction to Robot Programming ( / / ) ( / / ) Before you get started, print out this
Robotics Engineering DoDEA Career Technology Education Robot Programming Area Competency G. Robot Programming 1. Introduction to Robot Programming ( / / ) ( / / ) Before you get started, print out this
General Description. The TETRIX MAX Servo Motor Expansion Controller features the following:
 General Description The TETRIX MAX Servo Motor Expansion Controller is a servo motor expansion peripheral designed to allow the addition of multiple servo motors to the PRIZM Robotics Controller. The device
General Description The TETRIX MAX Servo Motor Expansion Controller is a servo motor expansion peripheral designed to allow the addition of multiple servo motors to the PRIZM Robotics Controller. The device
BEYOND TOYS. Wireless sensor extension pack. Tom Frissen s
 LEGO BEYOND TOYS Wireless sensor extension pack Tom Frissen s040915 t.e.l.n.frissen@student.tue.nl December 2008 Faculty of Industrial Design Eindhoven University of Technology 1 2 TABLE OF CONTENT CLASS
LEGO BEYOND TOYS Wireless sensor extension pack Tom Frissen s040915 t.e.l.n.frissen@student.tue.nl December 2008 Faculty of Industrial Design Eindhoven University of Technology 1 2 TABLE OF CONTENT CLASS
Lego Nxt in Physical Etoys
 Lego Nxt in Physical Etoys Physical Etoys is a software Project which let us control, in real time, Lego Mindstorms Nxt s Robots using a Bluetooth connection. SqueakNxt is a module of the Physical Etoys
Lego Nxt in Physical Etoys Physical Etoys is a software Project which let us control, in real time, Lego Mindstorms Nxt s Robots using a Bluetooth connection. SqueakNxt is a module of the Physical Etoys
LEGO BASED CHALLENGE. 1. Material
 LEGO BASED CHALLENGE 1. Material 1. The controller, motors and sensors used to assemble robots must be from LEGO MINDSTORMS sets (NXT or EV3). 2. Only LEGO branded elements may be used to construct the
LEGO BASED CHALLENGE 1. Material 1. The controller, motors and sensors used to assemble robots must be from LEGO MINDSTORMS sets (NXT or EV3). 2. Only LEGO branded elements may be used to construct the
Introducing 32-bit microcontroller technologies to a technology teacher training programme
 2 nd World Conference on Technology and Engineering Education 2011 WIETE Ljubljana, Slovenia, 5-8 September 2011 Introducing 32-bit microcontroller technologies to a technology teacher training programme
2 nd World Conference on Technology and Engineering Education 2011 WIETE Ljubljana, Slovenia, 5-8 September 2011 Introducing 32-bit microcontroller technologies to a technology teacher training programme
2.4 Sensorized robots
 66 Chap. 2 Robotics as learning object 2.4 Sensorized robots 2.4.1 Introduction The main objectives (competences or skills to be acquired) behind the problems presented in this section are: - The students
66 Chap. 2 Robotics as learning object 2.4 Sensorized robots 2.4.1 Introduction The main objectives (competences or skills to be acquired) behind the problems presented in this section are: - The students
LS Creative Learnings Pvt Ltd. STEM-Robotics Education. Report for Sep S.B. Patil Public School, Pune
 LS Creative s Pvt Ltd. STEM-Robotics Education Report for Sep 2017 S.B. Patil Public School, Pune 1 Sept 2017 Grade: III Helicopter To understand about different modes of transportation like airways. Science
LS Creative s Pvt Ltd. STEM-Robotics Education Report for Sep 2017 S.B. Patil Public School, Pune 1 Sept 2017 Grade: III Helicopter To understand about different modes of transportation like airways. Science
Part of: Inquiry Science with Dartmouth
 Curriculum Guide Part of: Inquiry Science with Dartmouth Developed by: David Qian, MD/PhD Candidate Department of Biomedical Data Science Overview Using existing knowledge of computer science, students
Curriculum Guide Part of: Inquiry Science with Dartmouth Developed by: David Qian, MD/PhD Candidate Department of Biomedical Data Science Overview Using existing knowledge of computer science, students
For Experimenters and Educators
 For Experimenters and Educators ARobot (pronounced "A robot") is a computer controlled mobile robot designed for Experimenters and Educators. Ages 14 and up (younger with help) can enjoy unlimited experimentation
For Experimenters and Educators ARobot (pronounced "A robot") is a computer controlled mobile robot designed for Experimenters and Educators. Ages 14 and up (younger with help) can enjoy unlimited experimentation
Tilt Sensor Maze Game
 Tilt Sensor Maze Game How to Setup the tilt sensor This describes how to set up and subsequently use a tilt sensor. In this particular example, we will use the tilt sensor to control a maze game, but it
Tilt Sensor Maze Game How to Setup the tilt sensor This describes how to set up and subsequently use a tilt sensor. In this particular example, we will use the tilt sensor to control a maze game, but it
Parts of a Lego RCX Robot
 Parts of a Lego RCX Robot RCX / Brain A B C The red button turns the RCX on and off. The green button starts and stops programs. The grey button switches between 5 programs, indicated as 1-5 on right side
Parts of a Lego RCX Robot RCX / Brain A B C The red button turns the RCX on and off. The green button starts and stops programs. The grey button switches between 5 programs, indicated as 1-5 on right side
TU Graz Robotics Challenge 2017
 1 TU Graz Robotics Challenge W I S S E N T E C H N I K L E I D E N S C H A F T TU Graz Robotics Challenge 2017 www.robotics-challenge.ist.tugraz.at Kick-Off 14.03.2017 u www.tugraz.at 2 Overview Introduction
1 TU Graz Robotics Challenge W I S S E N T E C H N I K L E I D E N S C H A F T TU Graz Robotics Challenge 2017 www.robotics-challenge.ist.tugraz.at Kick-Off 14.03.2017 u www.tugraz.at 2 Overview Introduction
Height Limited Switch
 Height Limited Switch Manual version: 1.0 Content Introduction...3 How it works...3 Key features...3 Hardware...4 Motor cut-off settings...4 Specification...4 Using the RC HLS #1 module...5 Powering the
Height Limited Switch Manual version: 1.0 Content Introduction...3 How it works...3 Key features...3 Hardware...4 Motor cut-off settings...4 Specification...4 Using the RC HLS #1 module...5 Powering the
Automatic Headlights
 Automatic Headlights Design car features that will improve nighttime driving safety. Learning Objectives Students will: Explore the concept of Inputs and the way to control them Explore the concept of
Automatic Headlights Design car features that will improve nighttime driving safety. Learning Objectives Students will: Explore the concept of Inputs and the way to control them Explore the concept of
UC DAVIS CENTER FOR INTEGRATED COMPUTING AND STEM EDUCATION (C STEM) Implementation Brochure /2018. c-stem.ucdavis.edu
 Implementation Brochure /2018. c-stem.ucdavis.edu") UC DAVIS CENTER FOR INTEGRATED COMPUTING AND STEM EDUCATION (C STEM) Implementation Brochure - 2017/2018 Transforming math education through computing. c-stem.ucdavis.edu ABOUT C STEM The UC Davis C-STEM
UC DAVIS CENTER FOR INTEGRATED COMPUTING AND STEM EDUCATION (C STEM) Implementation Brochure - 2017/2018 Transforming math education through computing. c-stem.ucdavis.edu ABOUT C STEM The UC Davis C-STEM
Multi-Agent Robotics with GPS Navigation
 Jay Joshi Edison High School 50 Boulevard of the Eagles Edison, NJ 08817 Multi-Agent Robotics with GPS Navigation Abstract The GPS Navigation project is a multi-agent robotics project. A GPS Navigation
Jay Joshi Edison High School 50 Boulevard of the Eagles Edison, NJ 08817 Multi-Agent Robotics with GPS Navigation Abstract The GPS Navigation project is a multi-agent robotics project. A GPS Navigation