Today s Menu. Near Infrared Sensors
|
|
|
- Marshall Robertson
- 5 years ago
- Views:
Transcription

.")

1 Today s Menu Near Infrared Sensors CdS Cells Programming Simple Behaviors 1 Near-Infrared Sensors Infrared (IR) Sensors > Near-infrared proximity sensors are called IRs for short. These devices are insensitive to the long infrared wavelengths detected by pyro-electric sensors, instead being sensitive in the range just below visible light, often around the 880 nanometer (nm) wavelength. The human eye cannot see this light, but charge coupled (CCD) cameras (e.g., camcorders) are sensitive to it. An infrared emitter detector pair can be built from a Sharp detector and a simple IR LED (available from Radio Shack). > The Sharp detector responds to a modulated carrier signal (rapidly turning on and off the transmitter) of 40 KHz emitted by the IR LED. This means that the would be user of this detector must blink the LED in a certain pattern such that the detector will respond. This modulated carrier protocol increases the signalto-noise ratio the source of the light can easily be detected from varying background illumination even if the actual amount of modulated light is very small. 2 1


2 Infrared Sensors Infrared (IR) Sensors > IR sensors are available in Analog and Digital versions from Sharp for approximately the same price, $8-$16. They are packaged with an IR LED and a photo-receiver in the same circuit. The digital version detects up to about 16cm and gives a logic 1 or 0 as output. The analog version gives a value that is proportional to distance. Typical models include GP2D* where *={02,120,12,05,15} > Interface consists of a simple 3 wire connector with V CC, GND and Signal GND Signal v Dead Space Nearly Linear V CC Infrared Sensors Infrared (IR) Sensors >Sharp cans are not as readily available as they once were, but one can still find them in ebay and Tower Hobbies. They cost about $3 each. 4 2
3 Infrared Sensors Infrared (IR) Sensors > MIL has published a document with instructions to hack a Sharp can to obtain an analog detector yielding values in an A/D pin between 80 and 140. Thus, together with a $0.50 IR LED, a ranging sensor can be constructed for under $5. 5 Sensors Sensor Types: Two basic types Analog & Digital. Digital sensors are intended to be plugged into the digital ports (pins) of a µc and always return either 0 or 1. For digital sensors 0 or LOW or 0v or 0 and 1 or HIGH or 5v or 255 Analog sensors are connected to the ADC input pins in a µc The analog to digital converter (ADC) in the robot board (µc) convert the input voltage to a n-bit value, where n is usually 8, 10, or 12 bits. In the 1935 robots, the Atmega128 chip uses 10 bits. The input voltage must be between 0v and 5v (newer µcs use 3.3v) For 2 bits: the binary values are 00 2, 01 2, 10 2, 11 2 (0,1,2,3 in decimal). There are 4 total values a 5v value is represented as 5v 4=1.25v per number (0v for 00 2, 1.25v for 01 2, 2.5v for 10 2 & 3.75v for 11 2 ) For 8-bits: 0 value 255 (2 8-1); for 10-bits: 0 value 1023 (2 10-1) For an 8-bit ADC (2 n=8 is 256 symbols) 0v 0 & 5v 255 (2 8-1) For a 10-bit ADC (2 10 is 1024 symbols), 0v 0 & 5v 1023 (2 10-1) 6 3
4 Simple Behaviors Simple Behavior Software Surprisingly simple behaviors can be accomplished with the sensors and hardware we have seen in class. Motors > We ll assume the existence of a motor(m,s) function where argument m ={0 or 1} for the left or the right motor, respectively, and argument s = speed, which is a value between -100 to +100, as a percent of full speed. motor(0,100) means move the left motor 100% forward motor(1,-100) means move the right motor 100% backward motor(0,0) means stop the left motor > Alternatively, we could create functions: forward, reverse, left, right and speed which yield equivalent functionality. > init_motor( ) turns on the PWM system 7 Simple Behaviors ADC >We ll assume the existence of an analog(c) routine where c is an integer representing the available channel in the A/D system. analog(0) returns the 10-bit integer value in ADC channel 0 init_analog( ) turns on the ADC system Timing >We ll assume a timing routine to gives us a desired delay, delay(tms) where tms is an integer value representing time in ms (1/1000 of a second) delay (500) wait 500 ms (1/2 a second) before continuing 8 4
5 Simple Behaviors Printing > We ll assume we ll have a way to print values to the LCD Function lcd_int(integer); prints an integer to the LCD Function lcd_string( string ); prints a constant string to the LCD Function lcd_ clear(); clears the LCD Function lcd_row(0 or 1); determines which line to write on the LCD Function init_lcd(); initializes the LCD system Conditionals > We will also assume we have a way to test a condition (usually a sensor value) and issue an actuator command which might change depending on the condition. This is analogous to an if statement in a high-level language. if (left_ir >125) /* If the Left IR indicates we are close */ speedr = -100; /* to an obstacle, turn right */ 9 Simple Behaviors Testing the sensors >We should always test the values of the sensors and actuators (motors) under software control to verify the correct operation of our sensory systems under run-time conditions >For IRs and CdS cells, we should connect them into the AD system and display the values sensed on the LCD. We need to find out what is the value in the AD corresponding to too close. >For motors and servos, we should verify correct operation & measure timing for various maneuvers. 10 5

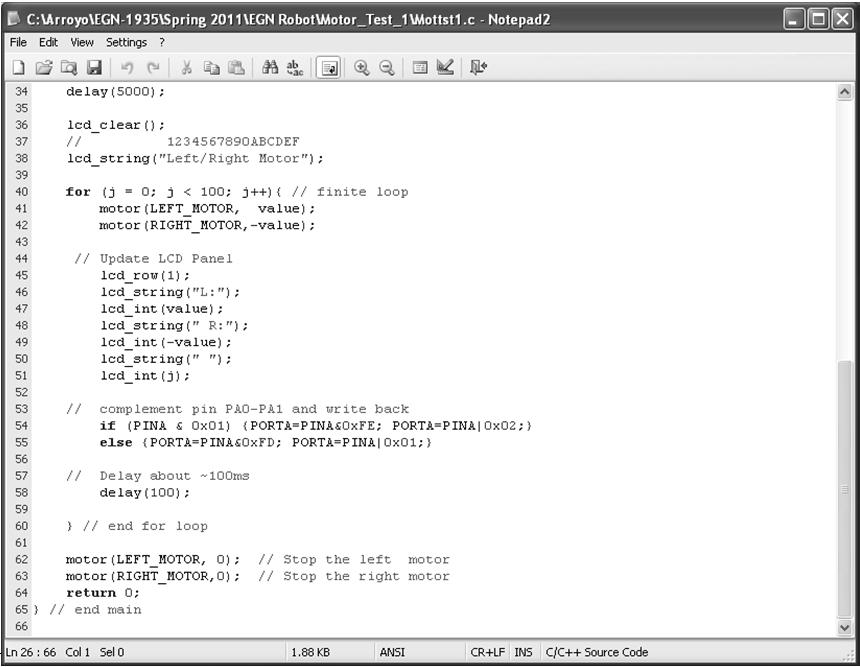
6 Testing Motors 1 11 Testing Motors

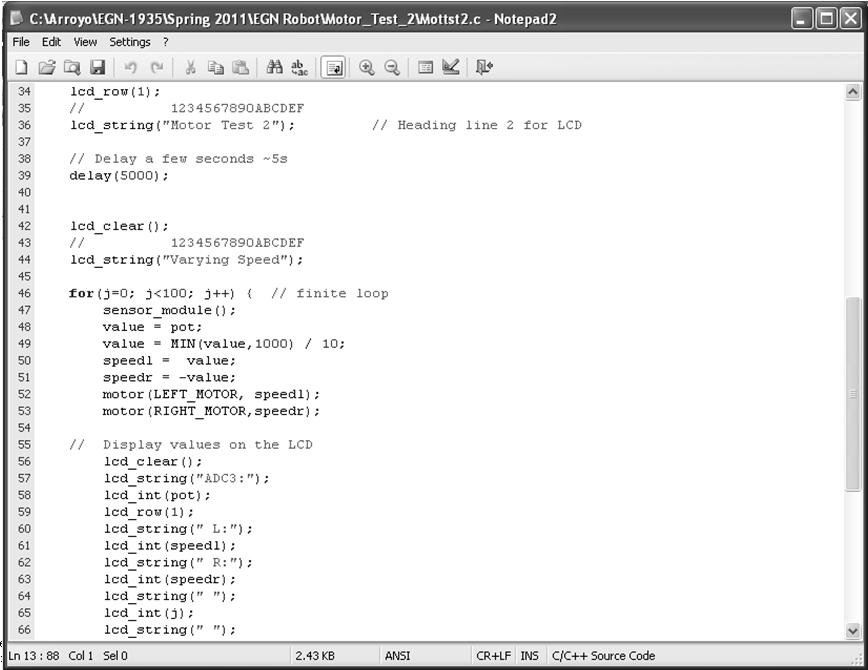
7 Testing Motors 2 13 Testing Motors

8 Testing Motors 2 15 CdS Cells When light shines on a CdS cell, R 2 below decreases to a minimum, say 1K, causing the AD value to decrease to 1/48 Vcc or 21 When a small amount of light shines on the CdS cell, the value of R 2 increases to a maximum value, say, 10K so the AD will read 10/57 Vcc or 180. We will pick R 1 so that these values are from

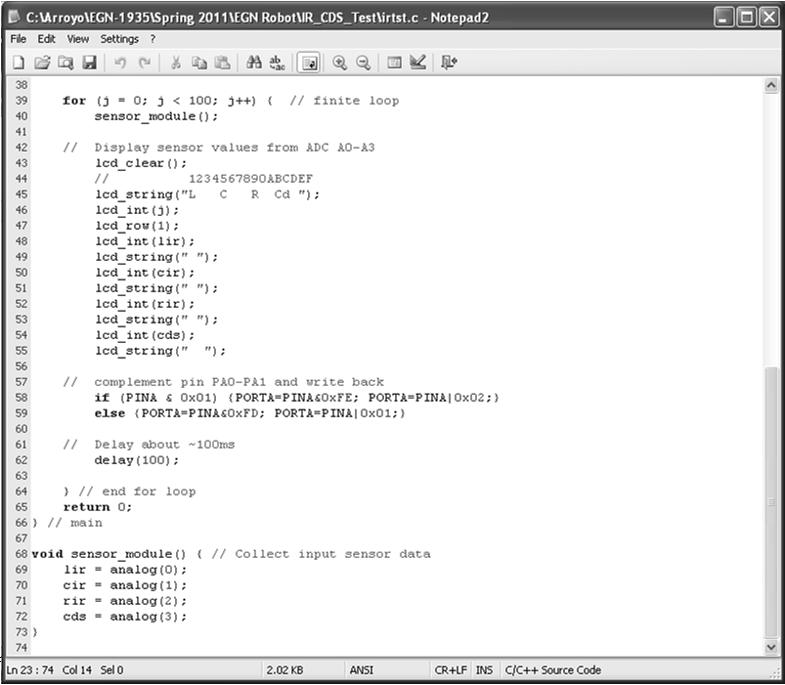
9 Testing IRs 17 Testing IRs 18 9
. If it is 0 turn one way, else turn the other way.")
10 Simple Behaviors Obstacle Avoidance >Read the IRs >If the left IR is too close reverse the right motor >If the right IR is too close reverse the left motor >If the center IR is too close back up 500ms & random turn >To get a uniform random number take the low order bit of the 16-bit Timer1 counting register (TCNT1). If it is 0 turn one way, else turn the other way. Take the remainder of TNCT1%1023 and use it as the amount of ms to turn (a minimum of 500ms) 19 Obstacle Avoidance 20 10

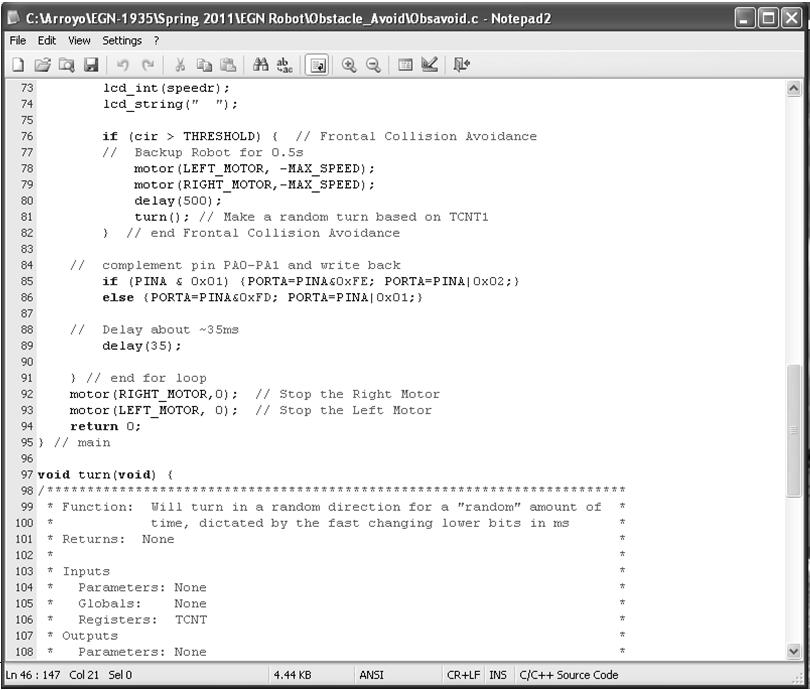
11 Obstacle Avoidance 21 Obstacle Avoidance 22 11

12 Obstacle Avoidance 23 Behaviors Multiple Behaviors >When multiple behaviors co-exist and the potential is there for contradictory values being sent to an actuator (motor), some sort of arbitration must take place to insure that the software does not generate spikes. >A simple arbitrator uses a sensor, such as a switch, or resistive sensor to determine which behavior has control >No behavior should ever control the motors directly >Let us add CdS control to Obstacle Avoidance 24 12


13 CdS & Obstacle Avoidance 25 CdS & Obstacle Avoidance 26 13


14 CdS & Obstacle Avoidance 27 CdS & Obstacle Avoidance 28 14

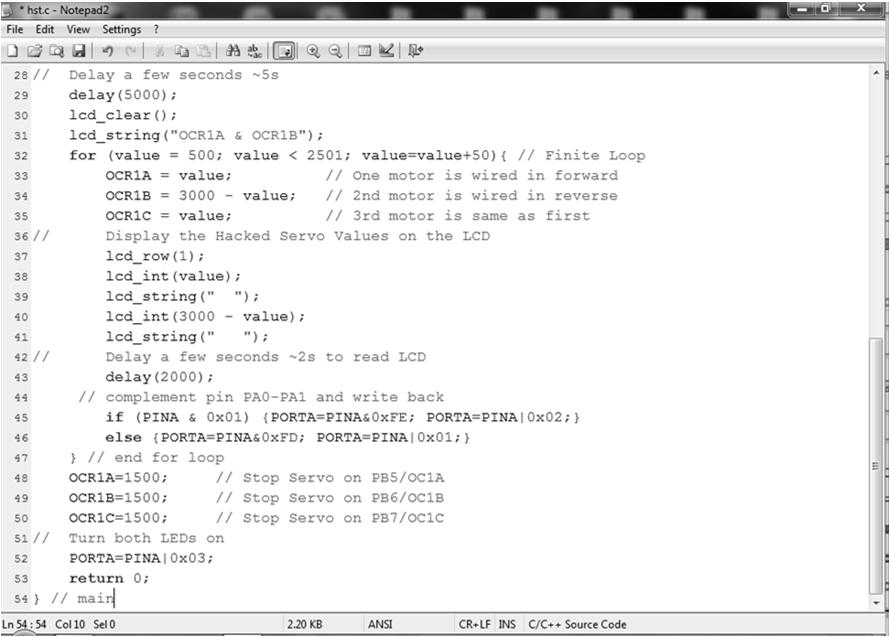
15 Hacked Servo Test 29 Hacked Servo Test 30 15
16 Learning is an important part of autonomy. A system is autonomous to the extent that its behaviour is determined by its immediate inputs and past experience, rather by its designer s. Agents are usually designed for a class of environments, where each member of the class is consistent with what the designer knows about what the real environment might hold in store for the agent. Truly autonomous systems should be able to operate successfully in any environment, given sufficient time to adapt. The system s internal knowledge structures should therefore be constructible, in principle, from its experience of the world The End! 31 16
Abstract. 1. Introduction
 Trans Am: An Experiment in Autonomous Navigation Jason W. Grzywna, Dr. A. Antonio Arroyo Machine Intelligence Laboratory Dept. of Electrical Engineering University of Florida, USA Tel. (352) 392-6605 Email:
Trans Am: An Experiment in Autonomous Navigation Jason W. Grzywna, Dr. A. Antonio Arroyo Machine Intelligence Laboratory Dept. of Electrical Engineering University of Florida, USA Tel. (352) 392-6605 Email:
GROUP BEHAVIOR IN MOBILE AUTONOMOUS AGENTS. Bruce Turner Intelligent Machine Design Lab Summer 1999
 GROUP BEHAVIOR IN MOBILE AUTONOMOUS AGENTS Bruce Turner Intelligent Machine Design Lab Summer 1999 1 Introduction: In the natural world, some types of insects live in social communities that seem to be
GROUP BEHAVIOR IN MOBILE AUTONOMOUS AGENTS Bruce Turner Intelligent Machine Design Lab Summer 1999 1 Introduction: In the natural world, some types of insects live in social communities that seem to be
Department of Electrical and Computer Engineering EEL Intelligent Machine Design Laboratory S.L.I.K Salt Laying Ice Killer FINAL REPORT
 Department of Electrical and Computer Engineering EEL 5666 Intelligent Machine Design Laboratory S.L.I.K. 2001 Salt Laying Ice Killer FINAL REPORT Daren Curry April 22, 2001 Table of Contents Abstract..
Department of Electrical and Computer Engineering EEL 5666 Intelligent Machine Design Laboratory S.L.I.K. 2001 Salt Laying Ice Killer FINAL REPORT Daren Curry April 22, 2001 Table of Contents Abstract..
Introduction. Theory of Operation
 Mohan Rokkam Page 1 12/15/2004 Introduction The goal of our project is to design and build an automated shopping cart that follows a shopper around. Ultrasonic waves are used due to the slower speed of
Mohan Rokkam Page 1 12/15/2004 Introduction The goal of our project is to design and build an automated shopping cart that follows a shopper around. Ultrasonic waves are used due to the slower speed of
University of Florida Department of Electrical and Computer Engineering EEL 5666 Intelligent Machines Design Laboratory GetMAD Final Report
 Date: 12/8/2009 Student Name: Sarfaraz Suleman TA s: Thomas Vermeer Mike Pridgen Instuctors: Dr. A. Antonio Arroyo Dr. Eric M. Schwartz University of Florida Department of Electrical and Computer Engineering
Date: 12/8/2009 Student Name: Sarfaraz Suleman TA s: Thomas Vermeer Mike Pridgen Instuctors: Dr. A. Antonio Arroyo Dr. Eric M. Schwartz University of Florida Department of Electrical and Computer Engineering
Electronics Design Laboratory Lecture #10. ECEN 2270 Electronics Design Laboratory
 Electronics Design Laboratory Lecture #10 Electronics Design Laboratory 1 Lessons from Experiment 4 Code debugging: use print statements and serial monitor window Circuit debugging: Re check operation
Electronics Design Laboratory Lecture #10 Electronics Design Laboratory 1 Lessons from Experiment 4 Code debugging: use print statements and serial monitor window Circuit debugging: Re check operation
EEL5666 Intelligent Machines Design Lab. Project Report
 EEL5666 Intelligent Machines Design Lab Project Report Instructor Dr. Arroyo & Dr. Schwartz TAs Adam & Sara 04/25/2006 Sharan Asundi Graduate Student Department of Mechanical and Aerospace Engineering
EEL5666 Intelligent Machines Design Lab Project Report Instructor Dr. Arroyo & Dr. Schwartz TAs Adam & Sara 04/25/2006 Sharan Asundi Graduate Student Department of Mechanical and Aerospace Engineering
EEL5666C IMDL Spring 2006 Student: Andrew Joseph. *Alarm-o-bot*
 EEL5666C IMDL Spring 2006 Student: Andrew Joseph *Alarm-o-bot* TAs: Adam Barnett, Sara Keen Instructor: A.A. Arroyo Final Report April 25, 2006 Table of Contents Abstract 3 Executive Summary 3 Introduction
EEL5666C IMDL Spring 2006 Student: Andrew Joseph *Alarm-o-bot* TAs: Adam Barnett, Sara Keen Instructor: A.A. Arroyo Final Report April 25, 2006 Table of Contents Abstract 3 Executive Summary 3 Introduction
Experiment #3: Micro-controlled Movement
 Experiment #3: Micro-controlled Movement So we re already on Experiment #3 and all we ve done is blinked a few LED s on and off. Hang in there, something is about to move! As you know, an LED is an output
Experiment #3: Micro-controlled Movement So we re already on Experiment #3 and all we ve done is blinked a few LED s on and off. Hang in there, something is about to move! As you know, an LED is an output
Sten BOT Robot Kit 1 Stensat Group LLC, Copyright 2016
 StenBOT Robot Kit Stensat Group LLC, Copyright 2016 1 Legal Stuff Stensat Group LLC assumes no responsibility and/or liability for the use of the kit and documentation. There is a 90 day warranty for the
StenBOT Robot Kit Stensat Group LLC, Copyright 2016 1 Legal Stuff Stensat Group LLC assumes no responsibility and/or liability for the use of the kit and documentation. There is a 90 day warranty for the
Alph and Ralph: Machine Intelligence and Herding Behavior Megan Grimm, Dr. A. Antonio Arroyo
 Alph and Ralph: Machine Intelligence and Herding Behavior Megan Grimm, Dr. A. Antonio Arroyo Machine Intelligence Laboratory Department of Electrical Engineering University of Florida, USA Tel. (352) 392-6605
Alph and Ralph: Machine Intelligence and Herding Behavior Megan Grimm, Dr. A. Antonio Arroyo Machine Intelligence Laboratory Department of Electrical Engineering University of Florida, USA Tel. (352) 392-6605
EE 314 Spring 2003 Microprocessor Systems
 EE 314 Spring 2003 Microprocessor Systems Laboratory Project #9 Closed Loop Control Overview and Introduction This project will bring together several pieces of software and draw on knowledge gained in
EE 314 Spring 2003 Microprocessor Systems Laboratory Project #9 Closed Loop Control Overview and Introduction This project will bring together several pieces of software and draw on knowledge gained in
Embedded Robotics. Software Development & Education Center
 Software Development & Education Center Embedded Robotics Robotics Development with ARM µp INTRODUCTION TO ROBOTICS Types of robots Legged robots Mobile robots Autonomous robots Manual robots Robotic arm
Software Development & Education Center Embedded Robotics Robotics Development with ARM µp INTRODUCTION TO ROBOTICS Types of robots Legged robots Mobile robots Autonomous robots Manual robots Robotic arm
High Current DC Motor Driver Manual
 High Current DC Motor Driver Manual 1.0 INTRODUCTION AND OVERVIEW This driver is one of the latest smart series motor drivers designed to drive medium to high power brushed DC motor with current capacity
High Current DC Motor Driver Manual 1.0 INTRODUCTION AND OVERVIEW This driver is one of the latest smart series motor drivers designed to drive medium to high power brushed DC motor with current capacity
CURIE Academy, Summer 2014 Lab 2: Computer Engineering Software Perspective Sign-Off Sheet
 Lab : Computer Engineering Software Perspective Sign-Off Sheet NAME: NAME: DATE: Sign-Off Milestone TA Initials Part 1.A Part 1.B Part.A Part.B Part.C Part 3.A Part 3.B Part 3.C Test Simple Addition Program
Lab : Computer Engineering Software Perspective Sign-Off Sheet NAME: NAME: DATE: Sign-Off Milestone TA Initials Part 1.A Part 1.B Part.A Part.B Part.C Part 3.A Part 3.B Part 3.C Test Simple Addition Program
A Day in the Life CTE Enrichment Grades 3-5 mblock Programs Using the Sensors
 Activity 1 - Reading Sensors A Day in the Life CTE Enrichment Grades 3-5 mblock Programs Using the Sensors Computer Science Unit This tutorial teaches how to read values from sensors in the mblock IDE.
Activity 1 - Reading Sensors A Day in the Life CTE Enrichment Grades 3-5 mblock Programs Using the Sensors Computer Science Unit This tutorial teaches how to read values from sensors in the mblock IDE.
ESE 350 Microcontroller Laboratory Lab 5: Sensor-Actuator Lab
 ESE 350 Microcontroller Laboratory Lab 5: Sensor-Actuator Lab The purpose of this lab is to learn about sensors and use the ADC module to digitize the sensor signals. You will use the digitized signals
ESE 350 Microcontroller Laboratory Lab 5: Sensor-Actuator Lab The purpose of this lab is to learn about sensors and use the ADC module to digitize the sensor signals. You will use the digitized signals
FABO ACADEMY X ELECTRONIC DESIGN
 ELECTRONIC DESIGN MAKE A DEVICE WITH INPUT & OUTPUT The Shanghaino can be programmed to use many input and output devices (a motor, a light sensor, etc) uploading an instruction code (a program) to it
ELECTRONIC DESIGN MAKE A DEVICE WITH INPUT & OUTPUT The Shanghaino can be programmed to use many input and output devices (a motor, a light sensor, etc) uploading an instruction code (a program) to it
Using a Sharp GP2D12 Infrared Ranger with BasicX
 Basic Express Application Note Using a Sharp GP2D12 Infrared Ranger with BasicX Introduction The Sharp GP2D12 infrared ranger is able to continuously measure the distance to an object. The usable range
Basic Express Application Note Using a Sharp GP2D12 Infrared Ranger with BasicX Introduction The Sharp GP2D12 infrared ranger is able to continuously measure the distance to an object. The usable range
Final Report Metallocalizer
 Date: 12/08/09 Student Name: Fernando N. Coviello TAs : Mike Pridgen Thomas Vermeer Instructors: Dr. A. Antonio Arroyo Dr. Eric M. Schwartz Final Report Metallocalizer University of Florida Department
Date: 12/08/09 Student Name: Fernando N. Coviello TAs : Mike Pridgen Thomas Vermeer Instructors: Dr. A. Antonio Arroyo Dr. Eric M. Schwartz Final Report Metallocalizer University of Florida Department
LDOR: Laser Directed Object Retrieving Robot. Final Report
 University of Florida Department of Electrical and Computer Engineering EEL 5666 Intelligent Machines Design Laboratory LDOR: Laser Directed Object Retrieving Robot Final Report 4/22/08 Mike Arms TA: Mike
University of Florida Department of Electrical and Computer Engineering EEL 5666 Intelligent Machines Design Laboratory LDOR: Laser Directed Object Retrieving Robot Final Report 4/22/08 Mike Arms TA: Mike
Lesson 13. The Big Idea: Lesson 13: Infrared Transmitters
 Lesson Lesson : Infrared Transmitters The Big Idea: In Lesson 12 the ability to detect infrared radiation modulated at 38,000 Hertz was added to the Arduino. This lesson brings the ability to generate
Lesson Lesson : Infrared Transmitters The Big Idea: In Lesson 12 the ability to detect infrared radiation modulated at 38,000 Hertz was added to the Arduino. This lesson brings the ability to generate
Distance Measurement of an Object by using Ultrasonic Sensors with Arduino and GSM Module
 IJSTE - International Journal of Science Technology & Engineering Volume 4 Issue 11 May 2018 ISSN (online): 2349-784X Distance Measurement of an Object by using Ultrasonic Sensors with Arduino and GSM
IJSTE - International Journal of Science Technology & Engineering Volume 4 Issue 11 May 2018 ISSN (online): 2349-784X Distance Measurement of an Object by using Ultrasonic Sensors with Arduino and GSM
Project Proposal. Underwater Fish 02/16/2007 Nathan Smith,
 Project Proposal Underwater Fish 02/16/2007 Nathan Smith, rahteski@gwu.edu Abstract The purpose of this project is to build a mechanical, underwater fish that can be controlled by a joystick. The fish
Project Proposal Underwater Fish 02/16/2007 Nathan Smith, rahteski@gwu.edu Abstract The purpose of this project is to build a mechanical, underwater fish that can be controlled by a joystick. The fish
MULTI ROBOT COMMUNICATION AND TARGET TRACKING SYSTEM AND IMPLEMENTATION OF ROBOT USING ARDUINO
 MULTI ROBOT COMMUNICATION AND TARGET TRACKING SYSTEM AND IMPLEMENTATION OF ROBOT USING ARDUINO K. Sindhuja 1, CH. Lavanya 2 1Student, Department of ECE, GIST College, Andhra Pradesh, INDIA 2Assistant Professor,
MULTI ROBOT COMMUNICATION AND TARGET TRACKING SYSTEM AND IMPLEMENTATION OF ROBOT USING ARDUINO K. Sindhuja 1, CH. Lavanya 2 1Student, Department of ECE, GIST College, Andhra Pradesh, INDIA 2Assistant Professor,
IR Detector for Mid Range Proximity Sensor
 IR Detector for Mid Range Proximity Sensor DESIGN SUPPORT TOOLS 1926 click logo to get started FEATURES Up to 2 m for proximity sensing Receives 38 khz modulated signal 94 nm peak wavelength Photo detector
IR Detector for Mid Range Proximity Sensor DESIGN SUPPORT TOOLS 1926 click logo to get started FEATURES Up to 2 m for proximity sensing Receives 38 khz modulated signal 94 nm peak wavelength Photo detector
EE 308 Lab Spring 2009
 9S12 Subsystems: Pulse Width Modulation, A/D Converter, and Synchronous Serial Interface In this sequence of three labs you will learn to use three of the MC9S12's hardware subsystems. WEEK 1 Pulse Width
9S12 Subsystems: Pulse Width Modulation, A/D Converter, and Synchronous Serial Interface In this sequence of three labs you will learn to use three of the MC9S12's hardware subsystems. WEEK 1 Pulse Width
Voice Guided Military Robot for Defence Application
 IJIRST International Journal for Innovative Research in Science & Technology Volume 2 Issue 11 April 2016 ISSN (online): 2349-6010 Voice Guided Military Robot for Defence Application Palak N. Patel Minal
IJIRST International Journal for Innovative Research in Science & Technology Volume 2 Issue 11 April 2016 ISSN (online): 2349-6010 Voice Guided Military Robot for Defence Application Palak N. Patel Minal
DASL 120 Introduction to Microcontrollers
 DASL 120 Introduction to Microcontrollers Lecture 2 Introduction to 8-bit Microcontrollers Introduction to 8-bit Microcontrollers Introduction to 8-bit Microcontrollers Introduction to Atmel Atmega328
DASL 120 Introduction to Microcontrollers Lecture 2 Introduction to 8-bit Microcontrollers Introduction to 8-bit Microcontrollers Introduction to 8-bit Microcontrollers Introduction to Atmel Atmega328
Attribution Thank you to Arduino and SparkFun for open source access to reference materials.
 Attribution Thank you to Arduino and SparkFun for open source access to reference materials. Contents Parts Reference... 1 Installing Arduino... 7 Unit 1: LEDs, Resistors, & Buttons... 7 1.1 Blink (Hello
Attribution Thank you to Arduino and SparkFun for open source access to reference materials. Contents Parts Reference... 1 Installing Arduino... 7 Unit 1: LEDs, Resistors, & Buttons... 7 1.1 Blink (Hello
UNIT1. Keywords page 13-14
 UNIT1 Keywords page 13-14 What is a Robot? A robot is a machine that can do the work of a human. Robots can be automatic, or they can be computer-controlled. Robots are a part of everyday life. Most robots
UNIT1 Keywords page 13-14 What is a Robot? A robot is a machine that can do the work of a human. Robots can be automatic, or they can be computer-controlled. Robots are a part of everyday life. Most robots
Project Name Here CSEE 4840 Project Design Document. Thomas Chau Ben Sack Peter Tsonev
 Project Name Here CSEE 4840 Project Design Document Thomas Chau tc2165@columbia.edu Ben Sack bs2535@columbia.edu Peter Tsonev pvt2101@columbia.edu Table of contents: Introduction Page 3 Block Diagram Page
Project Name Here CSEE 4840 Project Design Document Thomas Chau tc2165@columbia.edu Ben Sack bs2535@columbia.edu Peter Tsonev pvt2101@columbia.edu Table of contents: Introduction Page 3 Block Diagram Page
MICROCONTROLLER BASED SPEED SYNCHRONIZATION OF MULTIPLE DC MOTORS IN TEXTILE APPLICATIONS
 MICROCONTROLLER BASED SPEED SYNCHRONIZATION OF MULTIPLE DC MOTORS IN TEXTILE APPLICATIONS 1 RAKSHA A R, 2 KAVYA B, 3 PRAVEENA ANAJI, 4 NANDESH K N 1,2 UG student, 3,4 Assistant Professor Department of
MICROCONTROLLER BASED SPEED SYNCHRONIZATION OF MULTIPLE DC MOTORS IN TEXTILE APPLICATIONS 1 RAKSHA A R, 2 KAVYA B, 3 PRAVEENA ANAJI, 4 NANDESH K N 1,2 UG student, 3,4 Assistant Professor Department of
Range Rover Autonomous Golf Ball Collector
 Department of Electrical Engineering EEL 5666 Intelligent Machines Design Laboratory Director: Dr. Arroyo Range Rover Autonomous Golf Ball Collector Andrew Janecek May 1, 2000 Table of Contents Abstract.........................................................
Department of Electrical Engineering EEL 5666 Intelligent Machines Design Laboratory Director: Dr. Arroyo Range Rover Autonomous Golf Ball Collector Andrew Janecek May 1, 2000 Table of Contents Abstract.........................................................
Agent-based/Robotics Programming Lab II
 cis3.5, spring 2009, lab IV.3 / prof sklar. Agent-based/Robotics Programming Lab II For this lab, you will need a LEGO robot kit, a USB communications tower and a LEGO light sensor. 1 start up RoboLab
cis3.5, spring 2009, lab IV.3 / prof sklar. Agent-based/Robotics Programming Lab II For this lab, you will need a LEGO robot kit, a USB communications tower and a LEGO light sensor. 1 start up RoboLab
Citrus Circuits Fall Workshop Series. Roborio and Sensors. Paul Ngo and Ellie Hass
 Citrus Circuits Fall Workshop Series Roborio and Sensors Paul Ngo and Ellie Hass Introduction to Sensors Sensor: a device that detects or measures a physical property and records, indicates, or otherwise
Citrus Circuits Fall Workshop Series Roborio and Sensors Paul Ngo and Ellie Hass Introduction to Sensors Sensor: a device that detects or measures a physical property and records, indicates, or otherwise
EE 308 Spring S12 SUBSYSTEMS: PULSE WIDTH MODULATION, A/D CONVERTER, AND SYNCHRONOUS SERIAN INTERFACE
 9S12 SUBSYSTEMS: PULSE WIDTH MODULATION, A/D CONVERTER, AND SYNCHRONOUS SERIAN INTERFACE In this sequence of three labs you will learn to use the 9S12 S hardware sybsystem. WEEK 1 PULSE WIDTH MODULATION
9S12 SUBSYSTEMS: PULSE WIDTH MODULATION, A/D CONVERTER, AND SYNCHRONOUS SERIAN INTERFACE In this sequence of three labs you will learn to use the 9S12 S hardware sybsystem. WEEK 1 PULSE WIDTH MODULATION
Object Detection for Collision Avoidance in ITS
 Available online www.ejaet.com European Journal of Advances in Engineering and Technology, 2016, 3(5): 29-35 Research Article ISSN: 2394-658X Object Detection for Collision Avoidance in ITS Rupojyoti Kar
Available online www.ejaet.com European Journal of Advances in Engineering and Technology, 2016, 3(5): 29-35 Research Article ISSN: 2394-658X Object Detection for Collision Avoidance in ITS Rupojyoti Kar
Mechatronics Engineering and Automation Faculty of Engineering, Ain Shams University MCT-151, Spring 2015 Lab-4: Electric Actuators
 Mechatronics Engineering and Automation Faculty of Engineering, Ain Shams University MCT-151, Spring 2015 Lab-4: Electric Actuators Ahmed Okasha, Assistant Lecturer okasha1st@gmail.com Objective Have a
Mechatronics Engineering and Automation Faculty of Engineering, Ain Shams University MCT-151, Spring 2015 Lab-4: Electric Actuators Ahmed Okasha, Assistant Lecturer okasha1st@gmail.com Objective Have a
Understanding the Arduino to LabVIEW Interface
 E-122 Design II Understanding the Arduino to LabVIEW Interface Overview The Arduino microcontroller introduced in Design I will be used as a LabVIEW data acquisition (DAQ) device/controller for Experiments
E-122 Design II Understanding the Arduino to LabVIEW Interface Overview The Arduino microcontroller introduced in Design I will be used as a LabVIEW data acquisition (DAQ) device/controller for Experiments
Designing VCNL4000 into an Application
 VISHAY SEMICONDUCTORS Optoelectronics Application Note INTRODUCTION The VCNL4000 is a proximity sensor with an integrated ambient light sensor. It is the industry s first optical sensor to combine an infrared
VISHAY SEMICONDUCTORS Optoelectronics Application Note INTRODUCTION The VCNL4000 is a proximity sensor with an integrated ambient light sensor. It is the industry s first optical sensor to combine an infrared
PIC Functionality. General I/O Dedicated Interrupt Change State Interrupt Input Capture Output Compare PWM ADC RS232
 PIC Functionality General I/O Dedicated Interrupt Change State Interrupt Input Capture Output Compare PWM ADC RS232 General I/O Logic Output light LEDs Trigger solenoids Transfer data Logic Input Monitor
PIC Functionality General I/O Dedicated Interrupt Change State Interrupt Input Capture Output Compare PWM ADC RS232 General I/O Logic Output light LEDs Trigger solenoids Transfer data Logic Input Monitor
ECE 477 Digital Systems Senior Design Project Rev 8/09. Homework 5: Theory of Operation and Hardware Design Narrative
 ECE 477 Digital Systems Senior Design Project Rev 8/09 Homework 5: Theory of Operation and Hardware Design Narrative Team Code Name: _ATV Group No. 3 Team Member Completing This Homework: Sebastian Hening
ECE 477 Digital Systems Senior Design Project Rev 8/09 Homework 5: Theory of Operation and Hardware Design Narrative Team Code Name: _ATV Group No. 3 Team Member Completing This Homework: Sebastian Hening
Boe-Bot robot manual
 Tallinn University of Technology Department of Computer Engineering Chair of Digital Systems Design Boe-Bot robot manual Priit Ruberg Erko Peterson Keijo Lass Tallinn 2016 Contents 1 Robot hardware description...3
Tallinn University of Technology Department of Computer Engineering Chair of Digital Systems Design Boe-Bot robot manual Priit Ruberg Erko Peterson Keijo Lass Tallinn 2016 Contents 1 Robot hardware description...3
HVW Technologies Analog Infra-Red Ranging System (AIRRS )
") HVW Technologies Analog Infra-Red Ranging System (AIRRS ) Overview AIRRS is a low-cost, short-range Infra-Red (IR) alternative to ultrasonic range-finding systems. Usable detection range is 10 cm to 80
HVW Technologies Analog Infra-Red Ranging System (AIRRS ) Overview AIRRS is a low-cost, short-range Infra-Red (IR) alternative to ultrasonic range-finding systems. Usable detection range is 10 cm to 80
Hello, and welcome to this presentation of the STM32 Infrared Timer. Features of this interface allowing the generation of various IR remote control
 Hello, and welcome to this presentation of the STM32 Infrared Timer. Features of this interface allowing the generation of various IR remote control protocols will be presented. 1 The Infrared Timer peripheral
Hello, and welcome to this presentation of the STM32 Infrared Timer. Features of this interface allowing the generation of various IR remote control protocols will be presented. 1 The Infrared Timer peripheral
Quantizer step: volts Input Voltage [V]
![Quantizer step: volts Input Voltage [V]](/thumbs/96/126541381.jpg "Quantizer step: volts Input Voltage [V]") EE 101 Fall 2008 Date: Lab Section # Lab #8 Name: A/D Converter and ECEbot Power Abstract Partner: Autonomous robots need to have a means to sense the world around them. For example, the bumper switches
EE 101 Fall 2008 Date: Lab Section # Lab #8 Name: A/D Converter and ECEbot Power Abstract Partner: Autonomous robots need to have a means to sense the world around them. For example, the bumper switches
Critical Design Review: M.A.D. Dog. Nicholas Maddy Timothy Dayley Kevin Liou
 Critical Design Review: M.A.D. Dog Nicholas Maddy Timothy Dayley Kevin Liou Project Description M.A.D. Dog is an autonomous robot with the following functionalities: - Map and patrol an office environment.
Critical Design Review: M.A.D. Dog Nicholas Maddy Timothy Dayley Kevin Liou Project Description M.A.D. Dog is an autonomous robot with the following functionalities: - Map and patrol an office environment.
Sten-Bot Robot Kit Stensat Group LLC, Copyright 2013
 Sten-Bot Robot Kit Stensat Group LLC, Copyright 2013 Legal Stuff Stensat Group LLC assumes no responsibility and/or liability for the use of the kit and documentation. There is a 90 day warranty for the
Sten-Bot Robot Kit Stensat Group LLC, Copyright 2013 Legal Stuff Stensat Group LLC assumes no responsibility and/or liability for the use of the kit and documentation. There is a 90 day warranty for the
MD03-50Volt 20Amp H Bridge Motor Drive
 MD03-50Volt 20Amp H Bridge Motor Drive Overview The MD03 is a medium power motor driver, designed to supply power beyond that of any of the low power single chip H-Bridges that exist. Main features are
MD03-50Volt 20Amp H Bridge Motor Drive Overview The MD03 is a medium power motor driver, designed to supply power beyond that of any of the low power single chip H-Bridges that exist. Main features are
Gusano. University of Florida EEL 5666 Intelligent Machine Design Lab. Student: Christian Yanes Date: December 4, 2001 Professor: Dr. A.
 Gusano University of Florida EEL 5666 Intelligent Machine Design Lab Student: Christian Yanes Date: December 4, 2001 Professor: Dr. A. Arroyo 1 Table of Contents Abstract 3 Executive Summary 3 Introduction.4
Gusano University of Florida EEL 5666 Intelligent Machine Design Lab Student: Christian Yanes Date: December 4, 2001 Professor: Dr. A. Arroyo 1 Table of Contents Abstract 3 Executive Summary 3 Introduction.4
AUTOMATIC MISSILE DETECTOR USING ULTRASONIC PROXIMITY DETECTOR
 AUTOMATIC MISSILE DETECTOR USING ULTRASONIC PROXIMITY DETECTOR Narayan Thakkar, Shubham Sahu, Shrushti Sindhemeshram, Roshan Kumar Department of ETC Organization YCCE, Nagpur, Maharashtra, India Abstract
AUTOMATIC MISSILE DETECTOR USING ULTRASONIC PROXIMITY DETECTOR Narayan Thakkar, Shubham Sahu, Shrushti Sindhemeshram, Roshan Kumar Department of ETC Organization YCCE, Nagpur, Maharashtra, India Abstract
Robotics & Embedded Systems (Summer Training Program) 4 Weeks/30 Days
 4 Weeks/30 Days") (Summer Training Program) 4 Weeks/30 Days PRESENTED BY RoboSpecies Technologies Pvt. Ltd. Office: D-66, First Floor, Sector- 07, Noida, UP Contact us: Email: stp@robospecies.com Website: www.robospecies.com
(Summer Training Program) 4 Weeks/30 Days PRESENTED BY RoboSpecies Technologies Pvt. Ltd. Office: D-66, First Floor, Sector- 07, Noida, UP Contact us: Email: stp@robospecies.com Website: www.robospecies.com
University of Florida. Department of Electrical Engineering EEL5666. Intelligent Machine Design Laboratory. Doc Bloc. Larry Brock.
 University of Florida Department of Electrical Engineering EEL5666 Intelligent Machine Design Laboratory Doc Bloc Larry Brock April 21, 1999 IMDL Spring 1999 Instructor: Dr. Arroyo 2 Table of Contents
University of Florida Department of Electrical Engineering EEL5666 Intelligent Machine Design Laboratory Doc Bloc Larry Brock April 21, 1999 IMDL Spring 1999 Instructor: Dr. Arroyo 2 Table of Contents
Touchless Control: Hand Motion Triggered Light Timer
 Touchless Control: Hand Motion Triggered Light Timer 6.101 Final Project Report Justin Graves Spring 2018 1 Introduction Often times when you enter a new room you are troubled with finding the light switch
Touchless Control: Hand Motion Triggered Light Timer 6.101 Final Project Report Justin Graves Spring 2018 1 Introduction Often times when you enter a new room you are troubled with finding the light switch
POKER BOT. Justin McIntire EEL5666 IMDL. Dr. Schwartz and Dr. Arroyo
 POKER BOT Justin McIntire EEL5666 IMDL Dr. Schwartz and Dr. Arroyo Table of Contents: Introduction.page 3 Platform...page 4 Function...page 4 Sensors... page 6 Circuits....page 8 Behaviors...page 9 Problems
POKER BOT Justin McIntire EEL5666 IMDL Dr. Schwartz and Dr. Arroyo Table of Contents: Introduction.page 3 Platform...page 4 Function...page 4 Sensors... page 6 Circuits....page 8 Behaviors...page 9 Problems
Total Hours Registration through Website or for further details please visit (Refer Upcoming Events Section)
") Total Hours 110-150 Registration Q R Code Registration through Website or for further details please visit http://www.rknec.edu/ (Refer Upcoming Events Section) Module 1: Basics of Microprocessor & Microcontroller
Total Hours 110-150 Registration Q R Code Registration through Website or for further details please visit http://www.rknec.edu/ (Refer Upcoming Events Section) Module 1: Basics of Microprocessor & Microcontroller
Digital Imaging Rochester Institute of Technology
 Digital Imaging 1999 Rochester Institute of Technology So Far... camera AgX film processing image AgX photographic film captures image formed by the optical elements (lens). Unfortunately, the processing
Digital Imaging 1999 Rochester Institute of Technology So Far... camera AgX film processing image AgX photographic film captures image formed by the optical elements (lens). Unfortunately, the processing
Lab book. Exploring Robotics (CORC3303)
") Lab book Exploring Robotics (CORC3303) Dept of Computer and Information Science Brooklyn College of the City University of New York updated: Fall 2011 / Professor Elizabeth Sklar UNIT A Lab, part 1 : Robot
Lab book Exploring Robotics (CORC3303) Dept of Computer and Information Science Brooklyn College of the City University of New York updated: Fall 2011 / Professor Elizabeth Sklar UNIT A Lab, part 1 : Robot
IR Detector for Mid Range Proximity Sensor
 IR Detector for Mid Range Proximity Sensor MECHANICAL DATA Pinning 1 = OUT, 2 = GND, 3 = V S 1926 DESCRIPTION The is a compact infrared detector module for proximity sensing application. It receives 38
IR Detector for Mid Range Proximity Sensor MECHANICAL DATA Pinning 1 = OUT, 2 = GND, 3 = V S 1926 DESCRIPTION The is a compact infrared detector module for proximity sensing application. It receives 38
Figure 1. Overall Picture
 Jormungand, an Autonomous Robotic Snake Charles W. Eno, Dr. A. Antonio Arroyo Machine Intelligence Laboratory University of Florida Department of Electrical Engineering 1. Introduction In the Intelligent
Jormungand, an Autonomous Robotic Snake Charles W. Eno, Dr. A. Antonio Arroyo Machine Intelligence Laboratory University of Florida Department of Electrical Engineering 1. Introduction In the Intelligent
TENTATIVE PP800D120-V01
 Description: The Powerex POW-R-PAK is a configurable IGBT based power assembly that may be used as a converter, chopper, half or full bridge, or three phase inverter for motor control, power supply, UPS
Description: The Powerex POW-R-PAK is a configurable IGBT based power assembly that may be used as a converter, chopper, half or full bridge, or three phase inverter for motor control, power supply, UPS
Walle. Members: Sebastian Hening. Amir Pourshafiee. Behnam Zohoor CMPE 118/L. Introduction to Mechatronics. Professor: Gabriel H.
 Walle Members: Sebastian Hening Amir Pourshafiee Behnam Zohoor CMPE 118/L Introduction to Mechatronics Professor: Gabriel H. Elkaim March 19, 2012 Page 2 Introduction: In this report, we will explain the
Walle Members: Sebastian Hening Amir Pourshafiee Behnam Zohoor CMPE 118/L Introduction to Mechatronics Professor: Gabriel H. Elkaim March 19, 2012 Page 2 Introduction: In this report, we will explain the
CONSTRUCTION GUIDE Capacitor, Transistor & Motorbike. Robobox. Level VII
 CONSTRUCTION GUIDE Capacitor, Transistor & Motorbike Robobox Level VII Capacitor, Transistor & Motorbike In this box, we will understand in more detail the operation of DC motors, transistors and capacitor.
CONSTRUCTION GUIDE Capacitor, Transistor & Motorbike Robobox Level VII Capacitor, Transistor & Motorbike In this box, we will understand in more detail the operation of DC motors, transistors and capacitor.
The ROUS: Gait Experiments with Quadruped Agents Megan Grimm, A. Antonio Arroyo
 The ROUS: Gait Experiments with Quadruped Agents Megan Grimm, A. Antonio Arroyo Machine Intelligence Laboratory Department of Electrical Engineering University of Florida, USA Tel. (352) 392-6605 Abstract
The ROUS: Gait Experiments with Quadruped Agents Megan Grimm, A. Antonio Arroyo Machine Intelligence Laboratory Department of Electrical Engineering University of Florida, USA Tel. (352) 392-6605 Abstract
OBSTACLE EVADING ULTRASONIC ROBOT. Aaron Hunter Eric Whitestone Joel Chenette Anne-Marie Cressin
 OBSTACLE EVADING ULTRASONIC ROBOT Aaron Hunter Eric Whitestone Joel Chenette Anne-Marie Cressin ECE 511 - Fall 2011 1 Abstract The purpose of this project is to demonstrate how simple algorithms can produce
OBSTACLE EVADING ULTRASONIC ROBOT Aaron Hunter Eric Whitestone Joel Chenette Anne-Marie Cressin ECE 511 - Fall 2011 1 Abstract The purpose of this project is to demonstrate how simple algorithms can produce
Today s Menu. Resistors
 Today s Menu Resistors (Review), Voltage, Current Power, batteries Switches Simple Circuits > Voltage divider, pull up/down resistors, variable resistors, resistor ladder network A/D System > Bump sensors,
Today s Menu Resistors (Review), Voltage, Current Power, batteries Switches Simple Circuits > Voltage divider, pull up/down resistors, variable resistors, resistor ladder network A/D System > Bump sensors,
Shock Sensor Module This module is digital shock sensor. It will output a high level signal when it detects a shock event.
 Item Picture Description KY001: Temperature This module measures the temperature and reports it through the 1-wire bus digitally to the Arduino. DS18B20 (https://s3.amazonaws.com/linksprite/arduino_kits/advanced_sensors_kit/ds18b20.pdf)
Item Picture Description KY001: Temperature This module measures the temperature and reports it through the 1-wire bus digitally to the Arduino. DS18B20 (https://s3.amazonaws.com/linksprite/arduino_kits/advanced_sensors_kit/ds18b20.pdf)
COSC343: Artificial Intelligence
 COSC343: Artificial Intelligence Lecture 2: Starting from scratch: robotics and embodied AI Alistair Knott Dept. of Computer Science, University of Otago Alistair Knott (Otago) COSC343 Lecture 2 1 / 29
COSC343: Artificial Intelligence Lecture 2: Starting from scratch: robotics and embodied AI Alistair Knott Dept. of Computer Science, University of Otago Alistair Knott (Otago) COSC343 Lecture 2 1 / 29
Special Sensor Report
 University of Florida Dept. of Electrical Engineering Special Sensor Report Salman Siddiqui July 5, 2004 EEL5666C Intelligent Machine Design Lab Summer 2004 Dr. Arroyo Table of Contents Abstract......3
University of Florida Dept. of Electrical Engineering Special Sensor Report Salman Siddiqui July 5, 2004 EEL5666C Intelligent Machine Design Lab Summer 2004 Dr. Arroyo Table of Contents Abstract......3
The PmodIA is an impedance analyzer built around the Analog Devices AD bit Impedance Converter Network Analyzer.
 1300 Henley Court Pullman, WA 99163 509.334.6306 www.digilentinc.com PmodIA Reference Manual Revised April 15, 2016 This manual applies to the PmodIA rev. A Overview The PmodIA is an impedance analyzer
1300 Henley Court Pullman, WA 99163 509.334.6306 www.digilentinc.com PmodIA Reference Manual Revised April 15, 2016 This manual applies to the PmodIA rev. A Overview The PmodIA is an impedance analyzer
Revision for Grade 7 in Unit #1&3
 Your Name:.... Grade 7 / SEION 1 Matching :Match the terms with its explanations. Write the matching letter in the correct box. he first one has been done for you. (1 mark each) erm Explanation 1. electrical
Your Name:.... Grade 7 / SEION 1 Matching :Match the terms with its explanations. Write the matching letter in the correct box. he first one has been done for you. (1 mark each) erm Explanation 1. electrical
Exercise 5: PWM and Control Theory
 Exercise 5: PWM and Control Theory Overview In the previous sessions, we have seen how to use the input capture functionality of a microcontroller to capture external events. This functionality can also
Exercise 5: PWM and Control Theory Overview In the previous sessions, we have seen how to use the input capture functionality of a microcontroller to capture external events. This functionality can also
JAWS. The Autonomous Ball Collecting Robot. BY Kurnia Wonoatmojo
 JAWS The Autonomous Ball Collecting Robot BY Kurnia Wonoatmojo EEL 5666 Intelligent Machine Design Laboratory Summer 1998 Prof. A. A Arroyo Prof. M. Schwartz Table of Contents ABSTRACT EXECUTIVE SUMMARY
JAWS The Autonomous Ball Collecting Robot BY Kurnia Wonoatmojo EEL 5666 Intelligent Machine Design Laboratory Summer 1998 Prof. A. A Arroyo Prof. M. Schwartz Table of Contents ABSTRACT EXECUTIVE SUMMARY
Embedded Systems & Robotics (Winter Training Program) 6 Weeks/45 Days
 6 Weeks/45 Days") Embedded Systems & Robotics (Winter Training Program) 6 Weeks/45 Days PRESENTED BY RoboSpecies Technologies Pvt. Ltd. Office: W-53G, Sector-11, Noida-201301, U.P. Contact us: Email: stp@robospecies.com
Embedded Systems & Robotics (Winter Training Program) 6 Weeks/45 Days PRESENTED BY RoboSpecies Technologies Pvt. Ltd. Office: W-53G, Sector-11, Noida-201301, U.P. Contact us: Email: stp@robospecies.com
Name & SID 1 : Name & SID 2:
 EE40 Final Project-1 Smart Car Name & SID 1 : Name & SID 2: Introduction The final project is to create an intelligent vehicle, better known as a robot. You will be provided with a chassis(motorized base),
EE40 Final Project-1 Smart Car Name & SID 1 : Name & SID 2: Introduction The final project is to create an intelligent vehicle, better known as a robot. You will be provided with a chassis(motorized base),
ECE 511: MICROPROCESSORS
 ECE 511: MICROPROCESSORS A project report on SNIFFING DOG Under the guidance of Prof. Jens Peter Kaps By, Preethi Santhanam (G00767634) Ranjit Mandavalli (G00819673) Shaswath Raghavan (G00776950) Swathi
ECE 511: MICROPROCESSORS A project report on SNIFFING DOG Under the guidance of Prof. Jens Peter Kaps By, Preethi Santhanam (G00767634) Ranjit Mandavalli (G00819673) Shaswath Raghavan (G00776950) Swathi
Evaluation Kits EVA 100 and EVA 105
 Evaluation Kits EVA 100 and EVA 105 User Manual V1.7 April 2007 Revision History The following major modifications and improvements have been made to the first version of the document (EVA 100 User Manual
Evaluation Kits EVA 100 and EVA 105 User Manual V1.7 April 2007 Revision History The following major modifications and improvements have been made to the first version of the document (EVA 100 User Manual
Solar Powered Obstacle Avoiding Robot
 Solar Powered Obstacle Avoiding Robot S.S. Subashka Ramesh 1, Tarun Keshri 2, Sakshi Singh 3, Aastha Sharma 4 1 Asst. professor, SRM University, Chennai, Tamil Nadu, India. 2, 3, 4 B.Tech Student, SRM
Solar Powered Obstacle Avoiding Robot S.S. Subashka Ramesh 1, Tarun Keshri 2, Sakshi Singh 3, Aastha Sharma 4 1 Asst. professor, SRM University, Chennai, Tamil Nadu, India. 2, 3, 4 B.Tech Student, SRM
AUTOPILOT CONTROL SYSTEM - IV
 AUTOPILOT CONTROL SYSTEM - IV CONTROLLER The data from the inertial measurement unit is taken into the controller for processing. The input being analog requires to be passed through an ADC before being
AUTOPILOT CONTROL SYSTEM - IV CONTROLLER The data from the inertial measurement unit is taken into the controller for processing. The input being analog requires to be passed through an ADC before being
A Lego-Based Soccer-Playing Robot Competition For Teaching Design
 Session 2620 A Lego-Based Soccer-Playing Robot Competition For Teaching Design Ronald A. Lessard Norwich University Abstract Course Objectives in the ME382 Instrumentation Laboratory at Norwich University
Session 2620 A Lego-Based Soccer-Playing Robot Competition For Teaching Design Ronald A. Lessard Norwich University Abstract Course Objectives in the ME382 Instrumentation Laboratory at Norwich University
UNIT 4 VOCABULARY SKILLS WORK FUNCTIONS QUIZ. A detailed explanation about Arduino. What is Arduino? Listening
 UNIT 4 VOCABULARY SKILLS WORK FUNCTIONS QUIZ 4.1 Lead-in activity Find the missing letters Reading A detailed explanation about Arduino. What is Arduino? Listening To acquire a basic knowledge about Arduino
UNIT 4 VOCABULARY SKILLS WORK FUNCTIONS QUIZ 4.1 Lead-in activity Find the missing letters Reading A detailed explanation about Arduino. What is Arduino? Listening To acquire a basic knowledge about Arduino
Industrial Automation Training Academy. Arduino, LabVIEW & PLC Training Programs Duration: 6 Months (180 ~ 240 Hours)
") nfi Industrial Automation Training Academy Presents Arduino, LabVIEW & PLC Training Programs Duration: 6 Months (180 ~ 240 Hours) For: Electronics & Communication Engineering Electrical Engineering Instrumentation
nfi Industrial Automation Training Academy Presents Arduino, LabVIEW & PLC Training Programs Duration: 6 Months (180 ~ 240 Hours) For: Electronics & Communication Engineering Electrical Engineering Instrumentation
Enhanced SmartDrive40 MDS40B
 Enhanced SmartDrive40 MDS40B User's Manual Rev 1.0 December 2015 Created by Cytron Technologies Sdn. Bhd. All Rights Reserved 1 INDEX 1. Introduction 3 2. Packing List 4 3. Product Specifications 5 4.
Enhanced SmartDrive40 MDS40B User's Manual Rev 1.0 December 2015 Created by Cytron Technologies Sdn. Bhd. All Rights Reserved 1 INDEX 1. Introduction 3 2. Packing List 4 3. Product Specifications 5 4.
POLITECNICO DI MILANO
 POLITECNICO DI MILANO Final Year Bachelor Project PIXYBOT Mentor: Prof.Andrea Bonarini Author: Rohit Prakash Contents 1. Introduction....................... 1 2. Components....................... 1 2.1
POLITECNICO DI MILANO Final Year Bachelor Project PIXYBOT Mentor: Prof.Andrea Bonarini Author: Rohit Prakash Contents 1. Introduction....................... 1 2. Components....................... 1 2.1
Electronics, Sensors, and Actuators
 Electronics, Sensors, and Actuators 4/14/15 David Flicker BE107 Overview Basic electronics and components Sensors Actuators Electronics 101 Voltage, V, is fundamentally how much energy is gained or lost
Electronics, Sensors, and Actuators 4/14/15 David Flicker BE107 Overview Basic electronics and components Sensors Actuators Electronics 101 Voltage, V, is fundamentally how much energy is gained or lost
Adafruit 16-Channel PWM/Servo HAT & Bonnet for Raspberry Pi
 Adafruit 16-Channel PWM/Servo HAT & Bonnet for Raspberry Pi Created by lady ada Last updated on 2018-03-21 09:56:10 PM UTC Guide Contents Guide Contents Overview Powering Servos Powering Servos / PWM OR
Adafruit 16-Channel PWM/Servo HAT & Bonnet for Raspberry Pi Created by lady ada Last updated on 2018-03-21 09:56:10 PM UTC Guide Contents Guide Contents Overview Powering Servos Powering Servos / PWM OR
Distance Measurement. Figure 1: Internals of an IR electro-optical distance sensor
 Distance Measurement The Sharp GP2D12 Infrared Distance Sensor is an electro-optical device that emits an infrared (IR) beam from an LED and has a position sensitive detector (PSD) that receives reflected
Distance Measurement The Sharp GP2D12 Infrared Distance Sensor is an electro-optical device that emits an infrared (IR) beam from an LED and has a position sensitive detector (PSD) that receives reflected
understanding sensors
 The LEGO MINDSTORMS EV3 set includes three types of sensors: Touch, Color, and Infrared. You can use these sensors to make your robot respond to its environment. For example, you can program your robot
The LEGO MINDSTORMS EV3 set includes three types of sensors: Touch, Color, and Infrared. You can use these sensors to make your robot respond to its environment. For example, you can program your robot
HB-25 Motor Controller (#29144)
") Web Site: www.parallax.com Forums: forums.parallax.com Sales: sales@parallax.com Technical: support@parallax.com Office: (916) 624-8333 Fax: (916) 624-8003 Sales: (888) 512-1024 Tech Support: (888) 997-8267
Web Site: www.parallax.com Forums: forums.parallax.com Sales: sales@parallax.com Technical: support@parallax.com Office: (916) 624-8333 Fax: (916) 624-8003 Sales: (888) 512-1024 Tech Support: (888) 997-8267
Design and Implementation of Cell-Phone Detection based Line follower Robot Kanwaljeet Singh 1, Mandeep Singh 2, Dr.Neena Gupta
 International Journal of Electronics and Computer Science Engineering 1362 Available Online at www.ijecse.org ISSN- 2277-1956 Design and Implementation of Cell-Phone Detection based Line follower Robot
International Journal of Electronics and Computer Science Engineering 1362 Available Online at www.ijecse.org ISSN- 2277-1956 Design and Implementation of Cell-Phone Detection based Line follower Robot
Obstacle Avoiding Robot
 Obstacle Avoiding Robot Trinayan Saharia 1, Jyotika Bauri 2, Mrs. Chayanika Bhagabati 3 1,2 Student, 3 Asst. Prof., ECE, Assam down town University, Assam Abstract: An obstacle avoiding robot is an intelligent
Obstacle Avoiding Robot Trinayan Saharia 1, Jyotika Bauri 2, Mrs. Chayanika Bhagabati 3 1,2 Student, 3 Asst. Prof., ECE, Assam down town University, Assam Abstract: An obstacle avoiding robot is an intelligent
Onwards and Upwards, Your near space guide
 The NearSys One-Channel LED Photometer is based on Forest Mims 1992 article (Sun Photometer with Light-emitting Diodes as Spectrally selective Filters) about using LEDs as a narrow band photometer. The
The NearSys One-Channel LED Photometer is based on Forest Mims 1992 article (Sun Photometer with Light-emitting Diodes as Spectrally selective Filters) about using LEDs as a narrow band photometer. The
Welcome to EGN-1935: Electrical & Computer Engineering (Ad)Ventures
Ventures") : ECE (Ad)Ventures Welcome to -: Electrical & Computer Engineering (Ad)Ventures This is the first Educational Technology Class in UF s ECE Department We are Dr. Schwartz and Dr. Arroyo. University of Florida,
: ECE (Ad)Ventures Welcome to -: Electrical & Computer Engineering (Ad)Ventures This is the first Educational Technology Class in UF s ECE Department We are Dr. Schwartz and Dr. Arroyo. University of Florida,
Figure 1. CheapBot Smart Proximity Detector
 The CheapBot Smart Proximity Detector is a plug-in single-board sensor for almost any programmable robotic brain. With it, robots can detect the presence of a wall extending across the robot s path or
The CheapBot Smart Proximity Detector is a plug-in single-board sensor for almost any programmable robotic brain. With it, robots can detect the presence of a wall extending across the robot s path or
USING RS-232 to RS-485 CONVERTERS (With RS-232, RS-422 and RS-485 devices)
") ICS DataCom Application Note USING RS- to RS- CONVERTERS (With RS-, RS- and RS- devices) INTRODUCTION Table RS-/RS- Logic Levels This application note provides information about using ICSDataCom's RS-
ICS DataCom Application Note USING RS- to RS- CONVERTERS (With RS-, RS- and RS- devices) INTRODUCTION Table RS-/RS- Logic Levels This application note provides information about using ICSDataCom's RS-
Emergent Behavior Robot
 Emergent Behavior Robot Functional Description and Complete System Block Diagram By: Andrew Elliott & Nick Hanauer Project Advisor: Joel Schipper December 6, 2009 Introduction The objective of this project
Emergent Behavior Robot Functional Description and Complete System Block Diagram By: Andrew Elliott & Nick Hanauer Project Advisor: Joel Schipper December 6, 2009 Introduction The objective of this project
Brushed DC Motor Microcontroller PWM Speed Control with Optical Encoder and H-Bridge
 Brushed DC Motor Microcontroller PWM Speed Control with Optical Encoder and H-Bridge L298 Full H-Bridge HEF4071B OR Gate Brushed DC Motor with Optical Encoder & Load Inertia Flyback Diodes Arduino Microcontroller
Brushed DC Motor Microcontroller PWM Speed Control with Optical Encoder and H-Bridge L298 Full H-Bridge HEF4071B OR Gate Brushed DC Motor with Optical Encoder & Load Inertia Flyback Diodes Arduino Microcontroller
Balancing Bi-pod Robot
 Balancing Bi-pod Robot Dritan Zhuja Computer Science Department Graceland University Lamoni, Iowa 50140 zhuja@graceland.edu Abstract This paper is the reflection on two years of research and development
Balancing Bi-pod Robot Dritan Zhuja Computer Science Department Graceland University Lamoni, Iowa 50140 zhuja@graceland.edu Abstract This paper is the reflection on two years of research and development
HAW-Arduino. Sensors and Arduino F. Schubert HAW - Arduino 1
 HAW-Arduino Sensors and Arduino 14.10.2010 F. Schubert HAW - Arduino 1 Content of the USB-Stick PDF-File of this script Arduino-software Source-codes Helpful links 14.10.2010 HAW - Arduino 2 Report for
HAW-Arduino Sensors and Arduino 14.10.2010 F. Schubert HAW - Arduino 1 Content of the USB-Stick PDF-File of this script Arduino-software Source-codes Helpful links 14.10.2010 HAW - Arduino 2 Report for