Erik Von Burg Mesa Public Schools Gifted and Talented Program Johnson Elementary School
|
|
|
- Anne Gregory
- 5 years ago
- Views:
Transcription
1 Erik Von Burg Mesa Public Schools Gifted and Talented Program Johnson Elementary School Water Sabers (2008)* High Heelers (2009)* Helmeteers (2009)* Cyber Sleuths (2009)* LEGO All Stars (2010)* SQUAD (2011) Team A-maize-ing (2011) Multi-Colored Monkeys (2011) Quacking Cats (2011)* Jet Packs (2012) Team Fusion (2013)* TBD (2014)






2 Workshop Agenda 1. Foundations of problem solving 2. Moving Straight 3. Turning 4. Sensors Do: Work in teams of up to 3. Note observations and ask questions. Collaborate. Fail. And try again. Take risks. Expect some frustration. Don t: Give up. Expect to be spoon-fed an answer. Be silent. Be afraid to play.





3 Mechanisms Structure Automation Robot
4 Fundamentals of Problem Solving 1. Determine problem. 2. Gather information. 3. Think of possible solutions. 4. Pick a solution. 5. Implement. 6. Test and revise.

5 How might I move the robot accurately, consistently, and predictably?

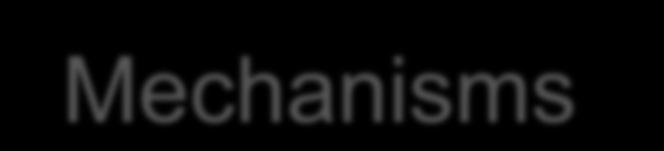
6

7 Back or Cancel Button Directional Buttons Select Button



")
8 Sensor Ports USB Cable Port (used to download program from computer) Motor Ports Charger

9 Recently Run Programs Menu Port View Menu Programs Menu Settings Menu
10
11 Challenge: Move the robot forward in a straight line.
12 Programming Lesson 1. EV3 interface. 2. Using the move block. Block = Command 3. Downloading the program to the brick.
13 error = NOT accurate, NOT consistent, or NOT predictable
14 Where do errors arise? Errors of translation: English Programming Language Errors of the messiness of the real world: Perfectly Controlled Programming Environment Randomness/Variability of the Real World
15 What is causing the error? How can we determine the origin of the error? How can we eliminate/mitigate the error?
16 Movement Problems Observed Behavior Curving/Turning Fishtail/Swagger Initial Jump Doesn t Move Possible Root Problems -Tires are different sizes. -Tires are not turning at the same speed. Motors are moving at different speeds. Motors start moving at different times. -Program problems. -Miscommunication between motors and brick. Possible Reasons for Problems -Tires improperly seated. -Tires are rubbing against motor. -Manufacturing error. Unmatched motors. Gear slop varies. -Loose wire connections. -Motor port problems. -Wires incorrectly connected.
17 How might I move the robot accurately, consistently, and predictably?
18 Fundamentals of Problem Solving 1. Determine problem. 2. Gather information. 3. Think of possible solutions. 4. Pick a solution. 5. Implement. 6. Test and revise.
19 Problem Solving Process 1. What s the specific or root problem? 2. What information is out there? What do I need to know? 3. What are some ideas? 4. Which idea should I go with? 5. What steps do I need to take? 6. What worked? What didn t? What can I improve?
20 Challenge: Park the robot between the lines.
21 Bonus Challenge: Park the robot as close to the wall as possible.
22 And, oh by the way, succeed the first time!
23 Follow-up Questions/Challenges Does changing the wheel size affect your program? Repeat the challenge over a greater distance. Does this change your approach? How does the power setting (speed) affect the robot? How could you create a formula to determine the number of rotations for any given distance? How might you move past the parking space and back into the spot? How does the initial placement affect where the robot ends up?
24 Please stop working and be ready to discuss.
25 Math Behind the Moves The distance the robot travels (D t ) is determined by the number of rotations (n) and the circumference of the tire (C). D t = n C Knowing this, we can use this solve for the tire circumference using the following equation. C = D t n When you know the tire circumference, you can determine the distance the robot will travel in one rotation. You can also distance travelled (D t ) by using the speed of the robot (S) and the time the motors are on (t). This is not recommended because speed is not constant. D t = S t
26 Scaffolding Instruction In what ways could you determine the number of rotations necessary to move a certain distance? Concrete Abstract
27 Let s add some turns.


28 Turning Pivot Turns One wheel turns while the other is stationary. Tank Turns One wheel turns forward and one turns backward.
29 Measuring Turns
30 Turn Calibration Exercises 360 Turn Calibration Program the robot to complete the following three actions: 1.Move forward about 2 rotations. 2.Turn Move forward about 1 rotations. Four Turn Test Program the robot to drive in a square using move block and a loop. This will help determine accurate 90 turns. Over steer (decrease turn) Perfect Turn Parameter Under steer Over steer Under steer (increase turn)
31 Please stop working and be ready to discuss.
32 Predictable Turn Angles Tire Rotations Number of Rotations = = Path Length Tire Circumference (Desired Turn Angle/360 )(2πr) Tire Circumference r
33 Question Sequence- Questioning Strategy How many rotations did it take to complete a 360 turn? How might you use this to determine how many rotations it would take to make a 90 turn? How many rotations will it take to have the robot complete a 1 turn? If this is true, how many rotations would it take to make a 149 turn?


34 Visualizing Turn Mechanics Tire Rotations Turning Jig One wheel turns while the other is locked into position.
35 Motion Mapping Obstacle Course Race Step Measurement Rotations 1 F R F R F First Robot Across Finish Line WINS!! 4

36
37 Challenge: Park the robot in the parking space.
38 Challenge: Park the robot in the parking space. Starting Line No part of the EV3 can be out of the parking space. Parking Space
39 Bonus Challenge: Move your robot through the maze.
40 Challenge: Navigate the Maze Move the robot from the beginning of the maze to the end. NXT can not touch the wall. Starting Line Finish Line
41 Challenge Time Challenges: 1. Turn to Parking Spot 2. Navigate the Maze 3. Create your own challenge (with straight lines and turns). Want to explore more? Try some of these changes. Try different speeds. Try different directions. Add more movements. Move in a figure 8. Navigate an obstacle course. Retrieve an object. Use your imagination.
42 Discussion Questions How does the initial placement affect the ending position? How can you accurately place the robot in the beginning? Does wheel size affect turn parameters? Castor wheels and sliders which is better? How do surfaces effect turn accuracy? Does weight placement affect the turn? Where should the weight be placed on a robot?
43 How might we use sensors to move the robot more accurately, consistently, and predictably?


44

45
46
47
48 How might we use sensors to find reference points or landmarks to move the robot more accurately, consistently, and predictably?
49 Sensors allow the robot to gather information to find intermediate reference points or landmarks. Shorter move distances = Less error Dynamic information gathering = Larger margin of error




50 EV3 Sensors Touch Ultrasonic Light Gyro Rotation

51 Programming Logic 1. turn on motor D to wait until rotation sensor gets to 4 rotations 3. stop motor D
52 Programming Logic 1. turn on motor D to wait until rotation sensor gets to 4 rotations 3. stop motor D
53 Programming Logic 1. turn on motor D to wait until rotation sensor gets to 4 rotations 3. stop motor D

54 Programming Logic 1. turn on motor D to wait until distance? touch? angle? color? 3. stop motor D
55 Challenge: Use sensors to park between two lines without knowing the starting line.
56 Challenge: Use sensors to move within two cm of a wall.
57 Challenge: Use sensors to solve the maze.
58 Sensor Challenges 1. Park between two lines without knowing the starting line. 2. Stop the robot within 2 cm of a wall without knowing starting line. 3. Solve the maze. 4. Invent your own. 5. BONUS: Have robot continuously explore room without getting stuck. 6. SUPER EXTRA BONUS: Follow a line. 7. EXTRAORDINARILY HUGE BONUS: Solve the maze regardless of starting point.

59 Obstacle Course Challenge Finish Start Task: How might you program your robot to move through the obstacle course. Constraints: -You must use at least two sensors. -You may not use any fixed duration move blocks to move the robot forward. You may use them on turns.

60
Robotics using Lego Mindstorms EV3 (Intermediate)
") Robotics using Lego Mindstorms EV3 (Intermediate) Facebook.com/roboticsgateway @roboticsgateway Robotics using EV3 Are we ready to go Roboticists? Does each group have at least one laptop? Do you have
Robotics using Lego Mindstorms EV3 (Intermediate) Facebook.com/roboticsgateway @roboticsgateway Robotics using EV3 Are we ready to go Roboticists? Does each group have at least one laptop? Do you have
Where C= circumference, π = 3.14, and D = diameter EV3 Distance. Developed by Joanna M. Skluzacek Wisconsin 4-H 2016 Page 1
 Instructor Guide Title: Distance the robot will travel based on wheel size Introduction Calculating the distance the robot will travel for each of the duration variables (rotations, degrees, seconds) can
Instructor Guide Title: Distance the robot will travel based on wheel size Introduction Calculating the distance the robot will travel for each of the duration variables (rotations, degrees, seconds) can
Ev3 Robotics Programming 101
 Ev3 Robotics Programming 101 1. EV3 main components and use 2. Programming environment overview 3. Connecting your Robot wirelessly via bluetooth 4. Starting and understanding the EV3 programming environment
Ev3 Robotics Programming 101 1. EV3 main components and use 2. Programming environment overview 3. Connecting your Robot wirelessly via bluetooth 4. Starting and understanding the EV3 programming environment
Nebraska 4-H Robotics and GPS/GIS and SPIRIT Robotics Projects
 Name: Club or School: Robots Knowledge Survey (Pre) Multiple Choice: For each of the following questions, circle the letter of the answer that best answers the question. 1. A robot must be in order to
Name: Club or School: Robots Knowledge Survey (Pre) Multiple Choice: For each of the following questions, circle the letter of the answer that best answers the question. 1. A robot must be in order to
Robotics Workshop. for Parents and Teachers. September 27, 2014 Wichita State University College of Engineering. Karen Reynolds
 Robotics Workshop for Parents and Teachers September 27, 2014 Wichita State University College of Engineering Steve Smith Christa McAuliffe Academy ssmith3@usd259.net Karen Reynolds Wichita State University
Robotics Workshop for Parents and Teachers September 27, 2014 Wichita State University College of Engineering Steve Smith Christa McAuliffe Academy ssmith3@usd259.net Karen Reynolds Wichita State University
Introduction to Robotics Rubrics
 Introduction to Robotics Rubrics Students can evaluate their project work according to the learning goals. Each rubric includes four levels: Bronze, Silver, Gold, and Platinum. The intention is to help
Introduction to Robotics Rubrics Students can evaluate their project work according to the learning goals. Each rubric includes four levels: Bronze, Silver, Gold, and Platinum. The intention is to help
LEGO Mindstorms Class: Lesson 1
 LEGO Mindstorms Class: Lesson 1 Some Important LEGO Mindstorm Parts Brick Ultrasonic Sensor Light Sensor Touch Sensor Color Sensor Motor Gears Axle Straight Beam Angled Beam Cable 1 The NXT-G Programming
LEGO Mindstorms Class: Lesson 1 Some Important LEGO Mindstorm Parts Brick Ultrasonic Sensor Light Sensor Touch Sensor Color Sensor Motor Gears Axle Straight Beam Angled Beam Cable 1 The NXT-G Programming
How Do You Make a Program Wait?
 How Do You Make a Program Wait? How Do You Make a Program Wait? Pre-Quiz 1. What is an algorithm? 2. Can you think of a reason why it might be inconvenient to program your robot to always go a precise
How Do You Make a Program Wait? How Do You Make a Program Wait? Pre-Quiz 1. What is an algorithm? 2. Can you think of a reason why it might be inconvenient to program your robot to always go a precise
understanding sensors
 The LEGO MINDSTORMS EV3 set includes three types of sensors: Touch, Color, and Infrared. You can use these sensors to make your robot respond to its environment. For example, you can program your robot
The LEGO MINDSTORMS EV3 set includes three types of sensors: Touch, Color, and Infrared. You can use these sensors to make your robot respond to its environment. For example, you can program your robot
Pre-Activity Quiz. 2 feet forward in a straight line? 1. What is a design challenge? 2. How do you program a robot to move
 Maze Challenge Pre-Activity Quiz 1. What is a design challenge? 2. How do you program a robot to move 2 feet forward in a straight line? 2 Pre-Activity Quiz Answers 1. What is a design challenge? A design
Maze Challenge Pre-Activity Quiz 1. What is a design challenge? 2. How do you program a robot to move 2 feet forward in a straight line? 2 Pre-Activity Quiz Answers 1. What is a design challenge? A design
EV3 Advanced Topics for FLL
 EV3 Advanced Topics for FLL Jim Keller GRASP Laboratory University of Pennsylvania August 14, 2016 Part 1 of 2 Topics Intro to Line Following Basic concepts Calibrate Calibrate the light sensor Display
EV3 Advanced Topics for FLL Jim Keller GRASP Laboratory University of Pennsylvania August 14, 2016 Part 1 of 2 Topics Intro to Line Following Basic concepts Calibrate Calibrate the light sensor Display
An Introduction to Programming using the NXT Robot:
 An Introduction to Programming using the NXT Robot: exploring the LEGO MINDSTORMS Common palette. Student Workbook for independent learners and small groups The following tasks have been completed by:
An Introduction to Programming using the NXT Robot: exploring the LEGO MINDSTORMS Common palette. Student Workbook for independent learners and small groups The following tasks have been completed by:
BEGINNER PROGRAMMING LESSON
 Basic Line Follower (NXT) By Sanjay and Arvind Seshan BEGINNER PROGRAMMING LESSON LESSON OBJECTIVES 1. Learn how humans and robots follow lines 2. Learn how to get a robot to follow a line using the NXT
Basic Line Follower (NXT) By Sanjay and Arvind Seshan BEGINNER PROGRAMMING LESSON LESSON OBJECTIVES 1. Learn how humans and robots follow lines 2. Learn how to get a robot to follow a line using the NXT
Robot Programming Manual
 2 T Program Robot Programming Manual Two sensor, line-following robot design using the LEGO NXT Mindstorm kit. The RoboRAVE International is an annual robotics competition held in Albuquerque, New Mexico,
2 T Program Robot Programming Manual Two sensor, line-following robot design using the LEGO NXT Mindstorm kit. The RoboRAVE International is an annual robotics competition held in Albuquerque, New Mexico,
acknowledgments...xv introduction...xvii 1 LEGO MINDSTORMS NXT 2.0: people, pieces, and potential getting started with the NXT 2.0 set...
 acknowledgments...xv introduction...xvii about this book...xvii part I: introduction to LEGO MINDSTORMS NXT 2.0...xviii part II: building...xviii part III: programming...xviii part IV: projects...xix companion
acknowledgments...xv introduction...xvii about this book...xvii part I: introduction to LEGO MINDSTORMS NXT 2.0...xviii part II: building...xviii part III: programming...xviii part IV: projects...xix companion
2.4 Sensorized robots
 66 Chap. 2 Robotics as learning object 2.4 Sensorized robots 2.4.1 Introduction The main objectives (competences or skills to be acquired) behind the problems presented in this section are: - The students
66 Chap. 2 Robotics as learning object 2.4 Sensorized robots 2.4.1 Introduction The main objectives (competences or skills to be acquired) behind the problems presented in this section are: - The students
Hare and Snail Challenges READY, GO!
 Hare and Snail Challenges READY, GO! Pre-Activity Quiz 1. What are some design considerations to make a fast robot? 2. What are some design considerations to make a slow robot? 2 Pre-Activity Quiz Answers
Hare and Snail Challenges READY, GO! Pre-Activity Quiz 1. What are some design considerations to make a fast robot? 2. What are some design considerations to make a slow robot? 2 Pre-Activity Quiz Answers
FLL Programming Workshop Series
 FLL Programming 2017 Workshop Series 2017 1 Prerequisites & Equipment Required Basic computer skills Assembled EV3 Educational robot or equivalent Computer or Laptop with LEGO Mindstorms software installed
FLL Programming 2017 Workshop Series 2017 1 Prerequisites & Equipment Required Basic computer skills Assembled EV3 Educational robot or equivalent Computer or Laptop with LEGO Mindstorms software installed
Worksheet Answer Key: Tree Measurer Projects > Tree Measurer
 Worksheet Answer Key: Tree Measurer Projects > Tree Measurer Maroon = exact answers Magenta = sample answers Construct: Test Questions: Caliper Reading Reading #1 Reading #2 1492 1236 1. Subtract to find
Worksheet Answer Key: Tree Measurer Projects > Tree Measurer Maroon = exact answers Magenta = sample answers Construct: Test Questions: Caliper Reading Reading #1 Reading #2 1492 1236 1. Subtract to find
Chassis & Attachments 101. Part 1: Chassis Overview
 Chassis & Attachments 101 Part 1: Chassis Overview 2017 1 Introductions Rest rooms location. Food and Drink. Cell phones. Today presentation available at: http://www.roboplex.org/fll 2 What can be used
Chassis & Attachments 101 Part 1: Chassis Overview 2017 1 Introductions Rest rooms location. Food and Drink. Cell phones. Today presentation available at: http://www.roboplex.org/fll 2 What can be used
I.1 Smart Machines. Unit Overview:
 I Smart Machines I.1 Smart Machines Unit Overview: This unit introduces students to Sensors and Programming with VEX IQ. VEX IQ Sensors allow for autonomous and hybrid control of VEX IQ robots and other
I Smart Machines I.1 Smart Machines Unit Overview: This unit introduces students to Sensors and Programming with VEX IQ. VEX IQ Sensors allow for autonomous and hybrid control of VEX IQ robots and other
Engineering with EV3 Workshop
 Baker s Dozen Car / Half Dozen Car Simplicity can be a wonderful thing. Engineering with EV3 Workshop Baker s Dozen Car: Build a simple EV3 car using any or all of the pieces shown below plus no more than
Baker s Dozen Car / Half Dozen Car Simplicity can be a wonderful thing. Engineering with EV3 Workshop Baker s Dozen Car: Build a simple EV3 car using any or all of the pieces shown below plus no more than
RoboCup Sumo Workshop. Margaux Edwards July 2018
 RoboCup Sumo Workshop Margaux Edwards July 2018 Plan for today: The Challenge Designing your Robot Programming your Robot Ultrasonic Sensor Light/Colour Sensor Competition Time! The Challenge: What is
RoboCup Sumo Workshop Margaux Edwards July 2018 Plan for today: The Challenge Designing your Robot Programming your Robot Ultrasonic Sensor Light/Colour Sensor Competition Time! The Challenge: What is
MADISON PUBLIC SCHOOL DISTRICT. GRADE 7 Robotics Cycle
 MADISON PUBLIC SCHOOL DISTRICT GRADE 7 Robotics Cycle Authored by: Erik Lih Richard Newbery Reviewed by: Lee Nittel Director of Curriculum and Instruction Tom Paterson K12 Supervisor of Science and Technology
MADISON PUBLIC SCHOOL DISTRICT GRADE 7 Robotics Cycle Authored by: Erik Lih Richard Newbery Reviewed by: Lee Nittel Director of Curriculum and Instruction Tom Paterson K12 Supervisor of Science and Technology
Mindstorms NXT. mindstorms.lego.com
 Mindstorms NXT mindstorms.lego.com A3B99RO Robots: course organization At the beginning of the semester the students are divided into small teams (2 to 3 students). Each team uses the basic set of the
Mindstorms NXT mindstorms.lego.com A3B99RO Robots: course organization At the beginning of the semester the students are divided into small teams (2 to 3 students). Each team uses the basic set of the
FLL Coaches Clinic Chassis and Attachments. Patrick R. Michaud
 FLL Coaches Clinic Chassis and Attachments Patrick R. Michaud pmichaud@pobox.com Erik Jonsson School of Engineering and Computer Science University of Texas at Dallas September 23, 2017 Presentation Outline
FLL Coaches Clinic Chassis and Attachments Patrick R. Michaud pmichaud@pobox.com Erik Jonsson School of Engineering and Computer Science University of Texas at Dallas September 23, 2017 Presentation Outline
Curriculum Activities for Driving Course Curriculum Sample 1
 Curriculum Activities for Driving Course Curriculum Sample 1 This sample is provided to give you some guidance in developing your own challenges. This mat is meant to serve as an intro to EV3 moves and
Curriculum Activities for Driving Course Curriculum Sample 1 This sample is provided to give you some guidance in developing your own challenges. This mat is meant to serve as an intro to EV3 moves and
Deriving Consistency from LEGOs
 Deriving Consistency from LEGOs What we have learned in 6 years of FLL and 7 years of Lego Robotics by Austin and Travis Schuh 1 2006 Austin and Travis Schuh, all rights reserved Objectives Basic Building
Deriving Consistency from LEGOs What we have learned in 6 years of FLL and 7 years of Lego Robotics by Austin and Travis Schuh 1 2006 Austin and Travis Schuh, all rights reserved Objectives Basic Building
Parts of a Lego RCX Robot
 Parts of a Lego RCX Robot RCX / Brain A B C The red button turns the RCX on and off. The green button starts and stops programs. The grey button switches between 5 programs, indicated as 1-5 on right side
Parts of a Lego RCX Robot RCX / Brain A B C The red button turns the RCX on and off. The green button starts and stops programs. The grey button switches between 5 programs, indicated as 1-5 on right side
Welcome to. NXT Basics. Presenter: Wael Hajj Ali With assistance of: Ammar Shehadeh - Souhaib Alzanki - Samer Abuthaher
 Welcome to NXT Basics Presenter: Wael Hajj Ali With assistance of: Ammar Shehadeh - Souhaib Alzanki - Samer Abuthaher Outline Have you met the Lizard? Introducing the Platform Lego Parts Motors Sensors
Welcome to NXT Basics Presenter: Wael Hajj Ali With assistance of: Ammar Shehadeh - Souhaib Alzanki - Samer Abuthaher Outline Have you met the Lizard? Introducing the Platform Lego Parts Motors Sensors
Chassis & Attachments 101. Chassis Overview
 Chassis & Attachments 101 Chassis Overview 2016 1 Introductions Rest rooms location. Food and Drink: Complementary bottled water. Snacks available for purchase from UME FTC teams. Cell phones. Today presentation
Chassis & Attachments 101 Chassis Overview 2016 1 Introductions Rest rooms location. Food and Drink: Complementary bottled water. Snacks available for purchase from UME FTC teams. Cell phones. Today presentation
OZOBOT BASIC TRAINING LESSON 1 WHAT IS OZOBOT?
 OZOBOT BASIC TRAINING LESSON 1 WHAT IS OZOBOT? What students will learn What kind of a robot is Ozobot? How does Ozobot sense its environment and move in it? How can you give commands to Ozobot? Topics
OZOBOT BASIC TRAINING LESSON 1 WHAT IS OZOBOT? What students will learn What kind of a robot is Ozobot? How does Ozobot sense its environment and move in it? How can you give commands to Ozobot? Topics
Chapter 1. Robots and Programs
 Chapter 1 Robots and Programs 1 2 Chapter 1 Robots and Programs Introduction Without a program, a robot is just an assembly of electronic and mechanical components. This book shows you how to give it a
Chapter 1 Robots and Programs 1 2 Chapter 1 Robots and Programs Introduction Without a program, a robot is just an assembly of electronic and mechanical components. This book shows you how to give it a
After Performance Report Of the Robot
 After Performance Report Of the Robot Engineering 112 Spring 2007 Instructor: Dr. Ghada Salama By Mahmudul Alam Tareq Al Maaita Ismail El Ebiary Section- 502 Date: May 2, 2007 Introduction: The report
After Performance Report Of the Robot Engineering 112 Spring 2007 Instructor: Dr. Ghada Salama By Mahmudul Alam Tareq Al Maaita Ismail El Ebiary Section- 502 Date: May 2, 2007 Introduction: The report
INTERMEDIATE PROGRAMMING LESSON
 INTERMEDIATE PROGRAMMING LESSON Turn_Degrees My Block By: Droids Robotics LESSON OBJECTIVES 1. Create a useful My Block 2. Learn to make a My Block that will take inputs based on measurements with a protractor
INTERMEDIATE PROGRAMMING LESSON Turn_Degrees My Block By: Droids Robotics LESSON OBJECTIVES 1. Create a useful My Block 2. Learn to make a My Block that will take inputs based on measurements with a protractor
Your EdVenture into Robotics 10 Lesson plans
 Your EdVenture into Robotics 10 Lesson plans Activity sheets and Worksheets Find Edison Robot @ Search: Edison Robot Call 800.962.4463 or email custserv@ Lesson 1 Worksheet 1.1 Meet Edison Edison is a
Your EdVenture into Robotics 10 Lesson plans Activity sheets and Worksheets Find Edison Robot @ Search: Edison Robot Call 800.962.4463 or email custserv@ Lesson 1 Worksheet 1.1 Meet Edison Edison is a
Robotic Programming. Skills Checklist
 Robotic Programming Skills Checklist Name: Motors Motors Direction Steering Power Duration Complete B & C Forward Straight 75 3 Rotations B & C Forward Straight 100 5 Rotatins B & C Forward Straight 50
Robotic Programming Skills Checklist Name: Motors Motors Direction Steering Power Duration Complete B & C Forward Straight 75 3 Rotations B & C Forward Straight 100 5 Rotatins B & C Forward Straight 50
TETRIX PULSE Workshop Guide
 TETRIX PULSE Workshop Guide 44512 1 Who Are We and Why Are We Here? Who is Pitsco? Pitsco s unwavering focus on innovative educational solutions and unparalleled customer service began when the company
TETRIX PULSE Workshop Guide 44512 1 Who Are We and Why Are We Here? Who is Pitsco? Pitsco s unwavering focus on innovative educational solutions and unparalleled customer service began when the company
Instructional Technology Center
 Partner Teacher Night March 2017 - Lego WeDo 2.0 What are Lego WeDos? WeDos are lego sets that come with a power source and a motor that allows students to create lego constructions that move like robots.
Partner Teacher Night March 2017 - Lego WeDo 2.0 What are Lego WeDos? WeDos are lego sets that come with a power source and a motor that allows students to create lego constructions that move like robots.
E Technology: A. Innovations Activity: Introduction to Robotics
 Science as Inquiry: As a result of their activities in grades 5 8, all students should develop Understanding about scientific inquiry. Abilities necessary to do scientific inquiry: identify questions,
Science as Inquiry: As a result of their activities in grades 5 8, all students should develop Understanding about scientific inquiry. Abilities necessary to do scientific inquiry: identify questions,
The power of Math in LEGO Robotics
 The power of Math in LEGO Robotics Disseminator: Marco Diez marcodiez@dadeschools.net Howard D. McMillan Middle School (Mail Code: 6441) 13100 SW 59 ST. Miami, FL 33183 For information concerning Ideas
The power of Math in LEGO Robotics Disseminator: Marco Diez marcodiez@dadeschools.net Howard D. McMillan Middle School (Mail Code: 6441) 13100 SW 59 ST. Miami, FL 33183 For information concerning Ideas
Line Detection. Duration Minutes. Di culty Intermediate. Learning Objectives Students will:
 Line Detection Design ways to improve driving safety by helping to prevent drivers from falling asleep and causing an accident. Learning Objectives Students will: Explore the concept of the Loop Understand
Line Detection Design ways to improve driving safety by helping to prevent drivers from falling asleep and causing an accident. Learning Objectives Students will: Explore the concept of the Loop Understand
Sample Pages. Classroom Activities for the Busy Teacher: NXT. 2 nd Edition. Classroom Activities for the Busy Teacher: NXT -
 Classroom Activities for the Busy Teacher: NXT 2 nd Edition Table of Contents Chapter 1: Introduction... 1 Chapter 2: What is a robot?... 5 Chapter 3: Flowcharting... 11 Chapter 4: DomaBot Basics... 15
Classroom Activities for the Busy Teacher: NXT 2 nd Edition Table of Contents Chapter 1: Introduction... 1 Chapter 2: What is a robot?... 5 Chapter 3: Flowcharting... 11 Chapter 4: DomaBot Basics... 15
Unit 4: Robot Chassis Construction
 Unit 4: Robot Chassis Construction Unit 4: Teacher s Guide Lesson Overview: Paul s robotic assistant needs to operate in a real environment. The size, scale, and capabilities of the TETRIX materials are
Unit 4: Robot Chassis Construction Unit 4: Teacher s Guide Lesson Overview: Paul s robotic assistant needs to operate in a real environment. The size, scale, and capabilities of the TETRIX materials are
Worksheet: Wheels and Distance Introduction to Mobile Robotics > Wheels and Distance Investigation
 Worksheet: s and Distance Introduction to Mobile Robotics > s and Distance Investigation This worksheet is provided for reference only. Be sure that you follow the steps in the online directions, and answer
Worksheet: s and Distance Introduction to Mobile Robotics > s and Distance Investigation This worksheet is provided for reference only. Be sure that you follow the steps in the online directions, and answer
VEX Robotics Platform and ROBOTC Software. Introduction
 VEX Robotics Platform and ROBOTC Software Introduction VEX Robotics Platform: Testbed for Learning Programming VEX Structure Subsystem VEX Structure Subsystem forms the base of every robot Contains square
VEX Robotics Platform and ROBOTC Software Introduction VEX Robotics Platform: Testbed for Learning Programming VEX Structure Subsystem VEX Structure Subsystem forms the base of every robot Contains square
Activity Template. Subject Area(s): Science and Technology Activity Title: Header. Grade Level: 9-12 Time Required: Group Size:
: Science and Technology Activity Title: Header. Grade Level: 9-12 Time Required: Group Size:") Activity Template Subject Area(s): Science and Technology Activity Title: What s In a Name? Header Image 1 ADA Description: Picture of a rover with attached pen for writing while performing program. Caption:
Activity Template Subject Area(s): Science and Technology Activity Title: What s In a Name? Header Image 1 ADA Description: Picture of a rover with attached pen for writing while performing program. Caption:
Robot Design.
 Robot Design Michael Hartwig kcfllref@gmail.com Agenda 2016 KC Region robots Design Elements and Process Robot Design Attachment Design Missions Demonstration Resources Questions 9/9/2017 2017 KC FLL Coaches
Robot Design Michael Hartwig kcfllref@gmail.com Agenda 2016 KC Region robots Design Elements and Process Robot Design Attachment Design Missions Demonstration Resources Questions 9/9/2017 2017 KC FLL Coaches
LEGO Mindstorms EV3 Robotics Instructor Guide. Joanna M. Skluzacek, PhD. Associate Professor. Department of Youth Development
 LEGO Mindstorms EV3 Robotics Instructor Guide Joanna M. Skluzacek, PhD Associate Professor Department of Youth Development University of Wisconsin Extension Introduction to LEGO Mindstorms EV3 developed
LEGO Mindstorms EV3 Robotics Instructor Guide Joanna M. Skluzacek, PhD Associate Professor Department of Youth Development University of Wisconsin Extension Introduction to LEGO Mindstorms EV3 developed
BUILDING A COMPETITION ROBOT SESHAN BROTHERS
 BUILDING A COMPETITION ROBOT SESHAN BROTHERS OUR RULES FOR ROBOT DESIGN RULE #1: Take your time to build your base robot before jumping into attachment building and solving missions. RULE #2: If you are
BUILDING A COMPETITION ROBOT SESHAN BROTHERS OUR RULES FOR ROBOT DESIGN RULE #1: Take your time to build your base robot before jumping into attachment building and solving missions. RULE #2: If you are
Some prior experience with building programs in Scratch is assumed. You can find some introductory materials here:
 Robotics 1b Building an mbot Program Some prior experience with building programs in Scratch is assumed. You can find some introductory materials here: http://www.mblock.cc/edu/ The mbot Blocks The mbot
Robotics 1b Building an mbot Program Some prior experience with building programs in Scratch is assumed. You can find some introductory materials here: http://www.mblock.cc/edu/ The mbot Blocks The mbot
MATERIALS PROVIDED BY SCIENCE & TECH FAIR STAFF AT EVENT:
 PURPOSE: The purpose of the Robotics competition is: 1) Design and create a robot, within the constraints listed below, which competes and wins the Robot competition described in the rules below. 2) The
PURPOSE: The purpose of the Robotics competition is: 1) Design and create a robot, within the constraints listed below, which competes and wins the Robot competition described in the rules below. 2) The
Instructors. Manual GEARED. After-School Robotics Program By Haley Hanson
 Instructors GEARED UP Manual After-School Robotics Program By Haley Hanson Table of Contents Introduction 3 Before you Start 4 Program Overview 5 Proposed Timeline 6 Itemized Materials List and Sample
Instructors GEARED UP Manual After-School Robotics Program By Haley Hanson Table of Contents Introduction 3 Before you Start 4 Program Overview 5 Proposed Timeline 6 Itemized Materials List and Sample
Students will design, program, and build a robot vehicle to traverse a maze in 30 seconds without touching any sidewalls or going out of bounds.
 Overview Challenge Students will design, program, and build a robot vehicle to traverse a maze in 30 seconds without touching any sidewalls or going out of bounds. Materials Needed One of these sets: TETRIX
Overview Challenge Students will design, program, and build a robot vehicle to traverse a maze in 30 seconds without touching any sidewalls or going out of bounds. Materials Needed One of these sets: TETRIX
Lab book. Exploring Robotics (CORC3303)
") Lab book Exploring Robotics (CORC3303) Dept of Computer and Information Science Brooklyn College of the City University of New York updated: Fall 2011 / Professor Elizabeth Sklar UNIT A Lab, part 1 : Robot
Lab book Exploring Robotics (CORC3303) Dept of Computer and Information Science Brooklyn College of the City University of New York updated: Fall 2011 / Professor Elizabeth Sklar UNIT A Lab, part 1 : Robot
The light sensor, rotation sensor, and motors may all be monitored using the view function on the RCX.
 Review the following material on sensors. Discuss how you might use each of these sensors. When you have completed reading through this material, build a robot of your choosing that has 2 motors (connected
Review the following material on sensors. Discuss how you might use each of these sensors. When you have completed reading through this material, build a robot of your choosing that has 2 motors (connected
EQ-ROBO Programming : bomb Remover Robot
 EQ-ROBO Programming : bomb Remover Robot Program begin Input port setting Output port setting LOOP starting point (Repeat the command) Condition 1 Key of remote controller : LEFT UP Robot go forwards after
EQ-ROBO Programming : bomb Remover Robot Program begin Input port setting Output port setting LOOP starting point (Repeat the command) Condition 1 Key of remote controller : LEFT UP Robot go forwards after
e d u c a t i o n Detect Dark Line Objectives Connect Teacher s Notes
 e d u c a t i o n Objectives Learn how to make the robot interact with the environment: Detect a line drawn on the floor by means of its luminosity. Hint You will need a flashlight or other light source
e d u c a t i o n Objectives Learn how to make the robot interact with the environment: Detect a line drawn on the floor by means of its luminosity. Hint You will need a flashlight or other light source
CSC C85 Embedded Systems Project # 1 Robot Localization
 1 The goal of this project is to apply the ideas we have discussed in lecture to a real-world robot localization task. You will be working with Lego NXT robots, and you will have to find ways to work around
1 The goal of this project is to apply the ideas we have discussed in lecture to a real-world robot localization task. You will be working with Lego NXT robots, and you will have to find ways to work around
Week Lesson Assignment SD Technology Standards. SPA Handout. Handouts. Handouts/quiz. Video/handout. Handout. Video, handout.
 Week Lesson Assignment SD Technology Standards 1 Lesson 1: Intro to Robotics class Discuss goals of class & definition of a robot SPA Define engineering, programming and system. Define managing a project.
Week Lesson Assignment SD Technology Standards 1 Lesson 1: Intro to Robotics class Discuss goals of class & definition of a robot SPA Define engineering, programming and system. Define managing a project.
Studuino Icon Programming Environment Guide
 Studuino Icon Programming Environment Guide Ver 0.9.6 4/17/2014 This manual introduces the Studuino Software environment. As the Studuino programming environment develops, these instructions may be edited
Studuino Icon Programming Environment Guide Ver 0.9.6 4/17/2014 This manual introduces the Studuino Software environment. As the Studuino programming environment develops, these instructions may be edited
Agent-based/Robotics Programming Lab II
 cis3.5, spring 2009, lab IV.3 / prof sklar. Agent-based/Robotics Programming Lab II For this lab, you will need a LEGO robot kit, a USB communications tower and a LEGO light sensor. 1 start up RoboLab
cis3.5, spring 2009, lab IV.3 / prof sklar. Agent-based/Robotics Programming Lab II For this lab, you will need a LEGO robot kit, a USB communications tower and a LEGO light sensor. 1 start up RoboLab
Two Hour Robot. Lets build a Robot.
 Lets build a Robot. Our robot will use an ultrasonic sensor and servos to navigate it s way around a maze. We will be making 2 voltage circuits : A 5 Volt for our ultrasonic sensor, sound and lights powered
Lets build a Robot. Our robot will use an ultrasonic sensor and servos to navigate it s way around a maze. We will be making 2 voltage circuits : A 5 Volt for our ultrasonic sensor, sound and lights powered
Basic NXT-G Programming
 Basic NXT-G Programming NXT-G Sequence Beams Blocks Structures (special blocks) Wires (connect ports on blocks & structures) Forward 2, Back 2, Talk 01-Basic Program.rbt Loop 36 times 02 Simple Structure
Basic NXT-G Programming NXT-G Sequence Beams Blocks Structures (special blocks) Wires (connect ports on blocks & structures) Forward 2, Back 2, Talk 01-Basic Program.rbt Loop 36 times 02 Simple Structure
Pre-Day Questionnaire
 LEGO Mindstorms Pre-Day Questionnaire Your Age? Please select your age from the options below: a) 11 b) 12 c) 13 d) 14 e) 15 or Older 0 0 0 0 0 11 12 13 14 15&or&Older Good at Problem Solving? Do you think
LEGO Mindstorms Pre-Day Questionnaire Your Age? Please select your age from the options below: a) 11 b) 12 c) 13 d) 14 e) 15 or Older 0 0 0 0 0 11 12 13 14 15&or&Older Good at Problem Solving? Do you think
FIRST LEGO LEAGUE. PowerUp Summer Game. Presented by FRC 6328
 FIRST LEGO LEAGUE PowerUp Summer Game 2018 Presented by FRC 6328 FLL POWER UP OVERVIEW The purpose of the FLL PowerUP game is to provide an engaging summer program for FLL students that will help prepare
FIRST LEGO LEAGUE PowerUp Summer Game 2018 Presented by FRC 6328 FLL POWER UP OVERVIEW The purpose of the FLL PowerUP game is to provide an engaging summer program for FLL students that will help prepare
Basic NXT-G Programming
 Basic NXT-G Programming Sequence Beams Blocks NXT-G Structures (special blocks) Wires (connect ports on blocks & structures) Forward 2, Back 2, Talk 01-Basic Program.rbt Forward 2, Back 2, Talk 02 Simple
Basic NXT-G Programming Sequence Beams Blocks NXT-G Structures (special blocks) Wires (connect ports on blocks & structures) Forward 2, Back 2, Talk 01-Basic Program.rbt Forward 2, Back 2, Talk 02 Simple
A - Debris on the Track
 A - Debris on the Track Rocks have fallen onto the line for the robot to follow, blocking its path. We need to make the program clever enough to not get stuck! 2017 https://www.hamiltonbuhl.com/teacher-resources
A - Debris on the Track Rocks have fallen onto the line for the robot to follow, blocking its path. We need to make the program clever enough to not get stuck! 2017 https://www.hamiltonbuhl.com/teacher-resources
A - Debris on the Track
 A - Debris on the Track Rocks have fallen onto the line for the robot to follow, blocking its path. We need to make the program clever enough to not get stuck! 2018 courses.techcamp.org.uk/ Page 1 of 7
A - Debris on the Track Rocks have fallen onto the line for the robot to follow, blocking its path. We need to make the program clever enough to not get stuck! 2018 courses.techcamp.org.uk/ Page 1 of 7
Squaring or Aligning on a Line
 ADVANCED EV3 PROGRAMMING LESSON Squaring or Aligning on a Line By Sanjay and Arvind Seshan Lesson Objectives Learn how to get your robot to square up (straighten out) when it comes to a line Learn how
ADVANCED EV3 PROGRAMMING LESSON Squaring or Aligning on a Line By Sanjay and Arvind Seshan Lesson Objectives Learn how to get your robot to square up (straighten out) when it comes to a line Learn how
Note to Teacher. Description of the investigation. Time Required. Materials. Procedures for Wheel Size Matters TEACHER. LESSONS WHEEL SIZE / Overview
 In this investigation students will identify a relationship between the size of the wheel and the distance traveled when the number of rotations of the motor axles remains constant. It is likely that many
In this investigation students will identify a relationship between the size of the wheel and the distance traveled when the number of rotations of the motor axles remains constant. It is likely that many
Table of Contents. Sample Pages - get the whole book at
 Table of Contents Chapter 1: Introduction... 1 Chapter 2: minivex Basics... 4 Chapter 3: What is a Robot?... 20 Chapter 4: Flowcharting... 25 Chapter 5: How Far?... 28 Chapter 6: How Fast?... 32 Chapter
Table of Contents Chapter 1: Introduction... 1 Chapter 2: minivex Basics... 4 Chapter 3: What is a Robot?... 20 Chapter 4: Flowcharting... 25 Chapter 5: How Far?... 28 Chapter 6: How Fast?... 32 Chapter
LAB 5: Mobile robots -- Modeling, control and tracking
 LAB 5: Mobile robots -- Modeling, control and tracking Overview In this laboratory experiment, a wheeled mobile robot will be used to illustrate Modeling Independent speed control and steering Longitudinal
LAB 5: Mobile robots -- Modeling, control and tracking Overview In this laboratory experiment, a wheeled mobile robot will be used to illustrate Modeling Independent speed control and steering Longitudinal
Laboratory 7: CONTROL SYSTEMS FUNDAMENTALS
 Laboratory 7: CONTROL SYSTEMS FUNDAMENTALS OBJECTIVES - Familiarize the students in the area of automatization and control. - Familiarize the student with programming of toy robots. EQUIPMENT AND REQUERIED
Laboratory 7: CONTROL SYSTEMS FUNDAMENTALS OBJECTIVES - Familiarize the students in the area of automatization and control. - Familiarize the student with programming of toy robots. EQUIPMENT AND REQUERIED
COSC343: Artificial Intelligence
 COSC343: Artificial Intelligence Lecture 2: Starting from scratch: robotics and embodied AI Alistair Knott Dept. of Computer Science, University of Otago Alistair Knott (Otago) COSC343 Lecture 2 1 / 29
COSC343: Artificial Intelligence Lecture 2: Starting from scratch: robotics and embodied AI Alistair Knott Dept. of Computer Science, University of Otago Alistair Knott (Otago) COSC343 Lecture 2 1 / 29
1 of 5 01/04/
 1 of 5 01/04/2004 2.02 &KXFN\SXWWLQJLWDOOWRJHWKHU :KRV&KXFN\WKHQ" is our test robot. He grown and evolved over the years as we ve hacked him around to test new modules. is ever changing, and this is a
1 of 5 01/04/2004 2.02 &KXFN\SXWWLQJLWDOOWRJHWKHU :KRV&KXFN\WKHQ" is our test robot. He grown and evolved over the years as we ve hacked him around to test new modules. is ever changing, and this is a
C - Underground Exploration
 C - Underground Exploration You've discovered an underground system of tunnels under the planet surface, but they are too dangerous to explore! Let's get our robot to explore instead. 2017 courses.techcamp.org.uk/
C - Underground Exploration You've discovered an underground system of tunnels under the planet surface, but they are too dangerous to explore! Let's get our robot to explore instead. 2017 courses.techcamp.org.uk/
Utah Elementary Robotics Obstacle Course Rules USU Physics Day. Competition at USU Brigham City Campus 989 S Main St Brigham City, UT 84302
 Utah Elementary Robotics Obstacle Course Rules USU Physics Day Competition at USU Brigham City Campus 989 S Main St Brigham City, UT 84302 Starting at 10:00 AM May 2 nd, 2017 COMPETITION OBJECTIVE The
Utah Elementary Robotics Obstacle Course Rules USU Physics Day Competition at USU Brigham City Campus 989 S Main St Brigham City, UT 84302 Starting at 10:00 AM May 2 nd, 2017 COMPETITION OBJECTIVE The
Part of: Inquiry Science with Dartmouth
 Curriculum Guide Part of: Inquiry Science with Dartmouth Developed by: David Qian, MD/PhD Candidate Department of Biomedical Data Science Overview Using existing knowledge of computer science, students
Curriculum Guide Part of: Inquiry Science with Dartmouth Developed by: David Qian, MD/PhD Candidate Department of Biomedical Data Science Overview Using existing knowledge of computer science, students
Robots in Town Autonomous Challenge. Overview. Challenge. Activity. Difficulty. Materials Needed. Class Time. Grade Level. Objectives.
 Overview Challenge Students will design, program, and build a robot that drives around in town while avoiding collisions and staying on the roads. The robot should turn around when it reaches the outside
Overview Challenge Students will design, program, and build a robot that drives around in town while avoiding collisions and staying on the roads. The robot should turn around when it reaches the outside
Line-Follower Challenge
 Line-Follower Challenge Pre-Activity Quiz 1. How does a color sensor work? Does the color sensor detect white or black as a higher amount of light reflectivity? Absorbance? 2. Can you think of a method
Line-Follower Challenge Pre-Activity Quiz 1. How does a color sensor work? Does the color sensor detect white or black as a higher amount of light reflectivity? Absorbance? 2. Can you think of a method
Inspiring Creative Fun Ysbrydoledig Creadigol Hwyl. LEGO Bowling Workbook
 Inspiring Creative Fun Ysbrydoledig Creadigol Hwyl LEGO Bowling Workbook Robots are devices, sometimes they run basic instructions via electric circuitry or on most occasions they can be programmable.
Inspiring Creative Fun Ysbrydoledig Creadigol Hwyl LEGO Bowling Workbook Robots are devices, sometimes they run basic instructions via electric circuitry or on most occasions they can be programmable.
Programming PIC Microchips
 Programming PIC Microchips Fís Foghlaim Forbairt Programming the PIC microcontroller using Genie Programming Editor Workshop provided & facilitated by the PDST www.t4.ie Page 1 DC motor control: DC motors
Programming PIC Microchips Fís Foghlaim Forbairt Programming the PIC microcontroller using Genie Programming Editor Workshop provided & facilitated by the PDST www.t4.ie Page 1 DC motor control: DC motors
The Nomenclature and Geometry of LEGO
 The Nomenclature and Geometry of LEGO AN OVERVIEW OF LEGO EV3 MINDSTORMS ELEMENTS AND HOW THEY WORK TOGETHER UPDATED 9/27/2015 Required Stuff Please do not wander the building. Rest Rooms Location. Food
The Nomenclature and Geometry of LEGO AN OVERVIEW OF LEGO EV3 MINDSTORMS ELEMENTS AND HOW THEY WORK TOGETHER UPDATED 9/27/2015 Required Stuff Please do not wander the building. Rest Rooms Location. Food
West Windsor-Plainsboro Regional School District Computer Programming Grade 8
 West Windsor-Plainsboro Regional School District Computer Programming Grade 8 Page 1 of 7 Unit 1: Programming Content Area: Technology Course & Grade Level: Computer Programming, Grade 8 Summary and Rationale
West Windsor-Plainsboro Regional School District Computer Programming Grade 8 Page 1 of 7 Unit 1: Programming Content Area: Technology Course & Grade Level: Computer Programming, Grade 8 Summary and Rationale
Here Comes the Sun. The Challenge
 Here Comes the Sun This activity requires ROBOLAB 2.0 or higher, the Infrared Transmitter and cable #9713, RCX #9709, elab sets #9680 and #9681. The Challenge Invent a car that finds the optimal light
Here Comes the Sun This activity requires ROBOLAB 2.0 or higher, the Infrared Transmitter and cable #9713, RCX #9709, elab sets #9680 and #9681. The Challenge Invent a car that finds the optimal light
Automatic Headlights
 Automatic Headlights Design car features that will improve nighttime driving safety. Learning Objectives Students will: Explore the concept of Inputs and the way to control them Explore the concept of
Automatic Headlights Design car features that will improve nighttime driving safety. Learning Objectives Students will: Explore the concept of Inputs and the way to control them Explore the concept of
6.081, Fall Semester, 2006 Assignment for Week 6 1
 6.081, Fall Semester, 2006 Assignment for Week 6 1 MASSACHVSETTS INSTITVTE OF TECHNOLOGY Department of Electrical Engineering and Computer Science 6.099 Introduction to EECS I Fall Semester, 2006 Assignment
6.081, Fall Semester, 2006 Assignment for Week 6 1 MASSACHVSETTS INSTITVTE OF TECHNOLOGY Department of Electrical Engineering and Computer Science 6.099 Introduction to EECS I Fall Semester, 2006 Assignment
Western Kansas Lego Robotics Competition April 16, 2018 Fort Hays State University
 Western Kansas Lego Robotics Competition April 16, 2018 Fort Hays State University WELCOME FHSU is hosting our 12 th annual Lego robotics competition. The competition is open to all area middle school
Western Kansas Lego Robotics Competition April 16, 2018 Fort Hays State University WELCOME FHSU is hosting our 12 th annual Lego robotics competition. The competition is open to all area middle school
contents in detail PART I GETTING STARTED acknowledgments...xvii
 contents in detail acknowledgments...xvii introduction...xix why this book?...xix is this book for you?...xix how does this book work?...xix the discoveries...xix what to expect in each chapter...xx getting
contents in detail acknowledgments...xvii introduction...xix why this book?...xix is this book for you?...xix how does this book work?...xix the discoveries...xix what to expect in each chapter...xx getting
4-H Mindstorm EV3 Robotics Camp Mills County 4 Day Camp Day 1, Tuesday AGENDA
 4-H Mindstorm EV3 Robotics Camp Mills County 4 Day Camp Day 1, Tuesday 8:30-9:15 am Registration 9:15-10:30 a..m Belonging Getting to Know You Activities 1. Center Stage a. Name b. School and Grade c.
4-H Mindstorm EV3 Robotics Camp Mills County 4 Day Camp Day 1, Tuesday 8:30-9:15 am Registration 9:15-10:30 a..m Belonging Getting to Know You Activities 1. Center Stage a. Name b. School and Grade c.
Flowcharts and Programs
 Flowcharts and Programs Engineering with Labview Laptop Program Schematic Editor Front Panel & Block Diagram Block Diagram: Program Code Front Panel: Virtual Dashboard Front Panel Block Diagram
Flowcharts and Programs Engineering with Labview Laptop Program Schematic Editor Front Panel & Block Diagram Block Diagram: Program Code Front Panel: Virtual Dashboard Front Panel Block Diagram
S B Patil Public School, Pune
 LS Creative Learnings Pvt Ltd., STEM-Robotics Education Report for Jan 2018 S B Patil Public School, Pune 1 Grade: III Jan 2017 Simple machine Inclined plane Lesson To understand about types of simple
LS Creative Learnings Pvt Ltd., STEM-Robotics Education Report for Jan 2018 S B Patil Public School, Pune 1 Grade: III Jan 2017 Simple machine Inclined plane Lesson To understand about types of simple
Learn about the RoboMind programming environment
 RoboMind Challenges Getting Started Learn about the RoboMind programming environment Difficulty: (Easy), Expected duration: an afternoon Description This activity uses RoboMind, a robot simulation environment,
RoboMind Challenges Getting Started Learn about the RoboMind programming environment Difficulty: (Easy), Expected duration: an afternoon Description This activity uses RoboMind, a robot simulation environment,
Devastator Tank Mobile Platform with Edison SKU:ROB0125
 Devastator Tank Mobile Platform with Edison SKU:ROB0125 From Robot Wiki Contents 1 Introduction 2 Tutorial 2.1 Chapter 2: Run! Devastator! 2.2 Chapter 3: Expansion Modules 2.3 Chapter 4: Build The Devastator
Devastator Tank Mobile Platform with Edison SKU:ROB0125 From Robot Wiki Contents 1 Introduction 2 Tutorial 2.1 Chapter 2: Run! Devastator! 2.2 Chapter 3: Expansion Modules 2.3 Chapter 4: Build The Devastator
Note to the Teacher. Description of the investigation. Time Required. Additional Materials VEX KITS AND PARTS NEEDED
 In this investigation students will identify a relationship between the size of the wheel and the distance traveled when the number of rotations of the motor axles remains constant. Students are required
In this investigation students will identify a relationship between the size of the wheel and the distance traveled when the number of rotations of the motor axles remains constant. Students are required
ME375 Lab Project. Bradley Boane & Jeremy Bourque April 25, 2018
 ME375 Lab Project Bradley Boane & Jeremy Bourque April 25, 2018 Introduction: The goal of this project was to build and program a two-wheel robot that travels forward in a straight line for a distance
ME375 Lab Project Bradley Boane & Jeremy Bourque April 25, 2018 Introduction: The goal of this project was to build and program a two-wheel robot that travels forward in a straight line for a distance
BEGINNER PROGRAMMING LESSON
 Basic Line Follower By Sanjay and Arvind Seshan BEGINNER PROGRAMMING LESSON LESSON OBJECTIVES 1. Learn how humans and robots follow lines 2. Learn how to get a robot to follow a line using Color Mode on
Basic Line Follower By Sanjay and Arvind Seshan BEGINNER PROGRAMMING LESSON LESSON OBJECTIVES 1. Learn how humans and robots follow lines 2. Learn how to get a robot to follow a line using Color Mode on
1 Lab + Hwk 4: Introduction to the e-puck Robot
 1 Lab + Hwk 4: Introduction to the e-puck Robot This laboratory requires the following: (The development tools are already installed on the DISAL virtual machine (Ubuntu Linux) in GR B0 01): C development
1 Lab + Hwk 4: Introduction to the e-puck Robot This laboratory requires the following: (The development tools are already installed on the DISAL virtual machine (Ubuntu Linux) in GR B0 01): C development
Assembly Guide Robokits India
 Robotic Arm 5 DOF Assembly Guide Robokits India info@robokits.co.in Robokits World http://www.robokitsworld.com http://www.robokitsworld.com Page 1 Overview : 5 DOF Robotic Arm from Robokits is a robotic
Robotic Arm 5 DOF Assembly Guide Robokits India info@robokits.co.in Robokits World http://www.robokitsworld.com http://www.robokitsworld.com Page 1 Overview : 5 DOF Robotic Arm from Robokits is a robotic