Computer Vision. Thursday, August 30
|
|
|
- Clifford Logan
- 5 years ago
- Views:
Transcription










1 Computer Vision Thursday, August 30 1
2 Today Course overview Requirements, logistics Image formation 2
3 Introductions Instructor: Prof. Kristen Grauman cs TAY 4.118, Thurs 2-4 pm TA: Sudheendra Vijayanarasimhan cs ENS 31 NQ, Mon/Wed 1-2 pm Class page: Check for updates to schedule, assignments, etc. 3
4 Introductions 4
5 Computer vision Automatic understanding of images and video Computing properties of the 3D world from visual data Algorithms and representations to allow a machine to recognize objects, people, scenes, and activities. 5
6 Why vision? As image sources multiply, so do applications Relieve humans of boring, easy tasks Enhance human abilities Advance human-computer interaction, visualization Perception for robotics / autonomous agents Possible insights into human vision 6



")
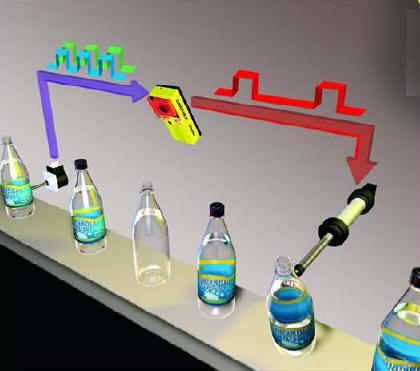
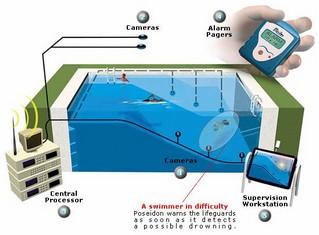
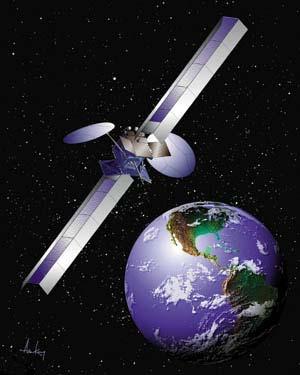
7 Some applications Factory inspection (Cognex) Monitoring for safety (Poseidon) Surveillance Visualization and tracking License plate reading Visualization 7






8 Some applications Autonomous robots Navigation, driver safety Assistive technology Visual effects (the Matrix) Medical imaging 8






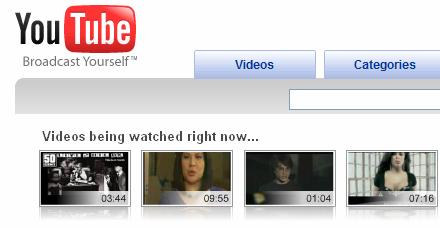
9 Some applications Multi-modal interfaces Situated search Image and video databases - CBIR Tracking, activity recognition 9
10 Why is vision difficult? Ill-posed problem: real world much more complex than what we can measure in images 3D 2D Impossible to literally invert image formation process 10






11 Challenges: robustness Illumination Object pose Clutter Occlusions Intra-class appearance Viewpoint 11









12 Challenges: context and human experience Context cues Function Dynamics 12
13 Challenges: complexity Thousands to millions of pixels in an image 3,000-30,000 human recognizable object categories 30+ degrees of freedom in the pose of articulated objects (humans) Billions of images indexed by Google Image Search 18 billion+ prints produced from digital camera images in million camera phones sold in 2005 About half of the cerebral cortex in primates is devoted to processing visual information [Felleman and van Essen 1991] 13
14 Why is vision difficult? Ill-posed problem: real world much more complex than what we can measure in images 3D 2D Not possible to invert image formation process Generally requires assumptions, constraints; exploitation of domainspecific knowledge 14
15 Related disciplines Geometry, physics Image processing Artificial intelligence Computer vision Algorithms Pattern recognition Cognitive science 15
16 Vision and graphics Images Vision Model Graphics Inverse problems: analysis and synthesis. 16
17 Research problems vs. application areas Feature detection Contour representation Segmentation Stereo vision Shape modeling Color vision Motion analysis Invariants Uncalibrated, selfcalibrating systems Object detection Object recognition Industrial inspection and quality control Reverse engineering Surveillance and security Face, gesture recognition Road monitoring Autonomous vehicles Military applications Medical image analysis Image databases Virtual reality List from [Trucco & Verri 1998] 17
18 Goals of this course Introduction to primary topics Hands-on experience with algorithms Views of vision as a research area 18
19 Topics overview Image formation, cameras Color Features Grouping Multiple views Recognition and learning Motion and tracking 19
20 We will not cover (extensively) Image processing Human visual system Particular machine vision systems or applications 20
21 Image formation Inverse process of vision: how does light in 3d world project to form 2d images? 21





22 Features and filters Transforming and describing images; textures and colors 22



23 Grouping Clustering, segmentation, fitting; what parts belong together? [fig from Shi et al] 23




24 Multiple views Lowe Hartley and Zisserman Multi-view geometry and matching, stereo Tomasi and Kanade 24



25 Recognition and learning Shape matching, recognizing objects and categories, learning techniques 25



26 Motion and tracking Tracking objects, video analysis, low level motion Tomas Izo 26
27 27
28 Requirements Biweekly (approx) problem sets Concept questions Implementation problems Two exams, midterm and final Current events (optional) In addition, for graduate students: Research paper summary and review Implementation extension 28
29 Grading policy Final grade breakdown: Problem sets (50%) Midterm quiz (15%) Final exam (20%) Class participation (15%) 29
30 Due dates Assignments due before class starts on due date Lose half of possible remaining credit each day late Three free late days, total 30
31 Collaboration policy You are welcome to discuss problem sets, but all responses and code must be written individually. Students submitting solutions found to be identical or substantially similar (due to inappropriate collaboration) risk failing the course. 31
32 Current events (optional) Any vision-related piece of news; may revolve around policy, editorial, technology, new product, Brief overview to the class Must be current No ads relevant links or information to TA 32
33 Paper review guidelines Thorough summary in your own words Main contribution Strengths? Weaknesses? How convincing are the experiments? Suggestions to improve them? Extensions? 4 pages max May require reading additional references 33
34 Miscellaneous Check class website Make sure you get on class mailing list No laptops in class please Feedback welcome and useful 34
35 35
36 Image formation How are objects in the world captured in an image? 36
37 Physical parameters of image formation Photometric Type, direction, intensity of light reaching sensor Surfaces reflectance properties Optical Sensor s lens type focal length, field of view, aperture Geometric Type of projection Camera pose Perspective distortions 37
38 Radiometry Images formed depend on amount of light from light sources and surface reflectance properties (See F&P Ch 4) 38



39 Light source direction Image credit: Don Deering 39

40 Surface reflectance properties Specular [fig from Fleming, Torralba, & Adelson, 2004] Lambertian 40
41 Perspective projection Pinhole camera: simple model to approximate imaging process Forsyth and Ponce If we treat pinhole as a point, only one ray from any given point can enter the camera 41

42 Camera obscura In Latin, means dark room "Reinerus Gemma-Frisius, observed an eclipse of the sun at Louvain on January 24, 1544, and later he used this illustration of the event in his book De Radio Astronomica et Geometrica, It is thought to be the first published illustration of a camera obscura..." Hammond, John H., The Camera Obscura, A Chronicle 42



43 Camera obscura Jetty at Margate England, An attraction in the late 19 th century Around 1870s Adapted from R. Duraiswami 43
44 Perspective effects Far away objects appear smaller Forsyth and Ponce 44
45 Perspective effects Parallel lines in the scene intersect in the image Forsyth and Ponce 45
46 Perspective projection equations 3d world mapped to 2d projection Image plane Focal length Camera frame Optical axis Board Forsyth and Ponce 46
47 Perspective projection equations Image plane Focal length Camera frame Optical axis Non-linear Scene point Image coordinates Forsyth and Ponce 47
48 Projection properties Many-to-one: any points along same ray map to same point in image Points points Lines lines (collinearity preserved) Distances and angles are not preserved Degenerate cases: Line through focal point projects to a point. Plane through focal point projects to line Plane perpendicular to image plane projects to part of the image. 48


49 Perspective and art Use of correct perspective projection indicated in 1 st century B.C. frescoes Skill resurfaces in Renaissance: artists develop systematic methods to determine perspective projection (around ) Raphael Durer,
50 Weak perspective Approximation: treat magnification as constant Assumes scene depth << average distance to camera Makes perspective equations linear Image plane World points: 50
51 Orthographic projection Given camera at constant distance from scene World points projected along rays parallel to optical access Limit of perspective projection as 51
52 Planar pinhole perspective Orthographic projection From M. Pollefeys 52
53 Which projection model? Weak perspective: Accurate for small, distant objects; recognition Linear projection equations - simplifies math Pinhole perspective: More accurate but more complex Structure from motion 53
54 54

55 Pinhole size / aperture Larger Brighter, blurrier Dimmer, more focus Smaller Dimmer, blur from defraction 55
56 Pinhole vs. lens 56
57 Cameras with lenses Gather more light, while keeping focus; make pinhole perspective projection practical Left focus Thin lens Right focus Rays entering parallel on one side go through focus on other, and vice versa. In ideal case all rays from P imaged at P. Lens diameter d Focal length f Field of view (portion of 3d space seen by camera) depends on d and f. 57
 from R.")
58 Field of view As f gets smaller, image becomes more wide angle (more world points project onto the finite image plane) As f gets larger, image becomes more telescopic (smaller part of the world projects onto the finite image plane) from R. Duraiswami 58

59 Focus and depth of field Depth of field: distance between image planes where blur is tolerable Thin lens: scene points at distinct depths come in focus at different image planes. (Real camera lens systems have greater depth of field.) circles of confusion Shapiro and Stockman 59




60 Focus and depth of field Image credit: cambridgeincolour.com 60


61 Depth from focus Images from same point of view, different camera parameters 3d shape / depth estimates [figs from H. Jin and P. Favaro, 2002] 61
62 Camera parameters How do points in real world relate to positions in the image? Perspective equations so far in terms of camera s reference frame 62
63 Camera parameters Need to estimate camera s intrinsic and extrinsic parameters to calibrate geometry. World frame Extrinsic: Camera frame World frame Camera frame Intrinsic: Image coordinates relative to camera Pixel coordinates 63
64 Camera calibration Extrinsic params: rotation matrix and translation vector Intrinsic params: focal length, pixel sizes (mm), image center point, radial distortion parameters Knowing the relationship between real world and image coordinates useful for estimating 3d shape More on this later 64

65 Articulated tracking Demirdjian et al. 65


66 3d skeleton extraction Brostow et al,

67 Human eye Pupil/Iris control amount of light passing through lens Retina - contains sensor cells, where image is formed Fovea highest concentration of cones Shapiro and Stockman 67
68 Sensors Often CCD camera: charge coupled device Record amount of light reaching grid photosensors, which convert light energy into voltage Read digital output row-by-row CCD array camera optics frame grabber computer 68
69 Think of images as matrices taken from CCD array. Digital images 69
70 Digital images Intensity : [0,255] j=1 width 520 i=0 500 height im[176][201] has value 164 im[194][203] has value 37 70


71 Color images, RGB color space R G B 71



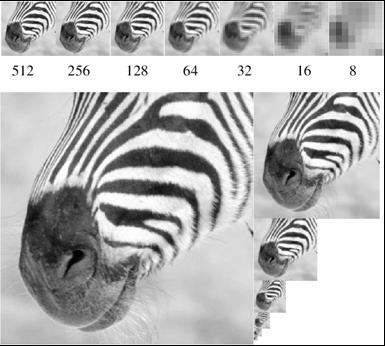
72 Resolution sensor: size of real world scene element a that images to a single pixel image: number of pixels Influences what analysis is feasible, affects best representation choice. [Mori et al] 72

73 Resolution though not necessarily for the human visual system with familiar faces [Sinha et al] 73




74 Stereo cameras MRI scans Xray LIDAR devices Other sensors [Jim Gasperini] geospatial-online.com 74
75 Summary Image formation affected by geometry, photometry, and optics. Projection equations express how world points mapped to 2d image. Lenses make pinhole model practical. Imaged points related to real world coordinates via calibrated cameras. 75
76 Next Problem set 0 due Sept 6 Matlab warmup Image formation questions Read F&P Chapter 1 Reading for next lecture: F&P Chapter 6 76
Unit 1: Image Formation
 Unit 1: Image Formation 1. Geometry 2. Optics 3. Photometry 4. Sensor Readings Szeliski 2.1-2.3 & 6.3.5 1 Physical parameters of image formation Geometric Type of projection Camera pose Optical Sensor
Unit 1: Image Formation 1. Geometry 2. Optics 3. Photometry 4. Sensor Readings Szeliski 2.1-2.3 & 6.3.5 1 Physical parameters of image formation Geometric Type of projection Camera pose Optical Sensor
Computer Vision Lecture 1
 Computer Vision Lecture 1 Introduction 19.10.2016 Bastian Leibe Visual Computing Institute RWTH Aachen University http://www.vision.rwth-aachen.de/ leibe@vision.rwth-aachen.de Organization Lecturer Prof.
Computer Vision Lecture 1 Introduction 19.10.2016 Bastian Leibe Visual Computing Institute RWTH Aachen University http://www.vision.rwth-aachen.de/ leibe@vision.rwth-aachen.de Organization Lecturer Prof.
CPSC 425: Computer Vision
 1 / 55 CPSC 425: Computer Vision Instructor: Fred Tung ftung@cs.ubc.ca Department of Computer Science University of British Columbia Lecture Notes 2015/2016 Term 2 2 / 55 Menu January 7, 2016 Topics: Image
1 / 55 CPSC 425: Computer Vision Instructor: Fred Tung ftung@cs.ubc.ca Department of Computer Science University of British Columbia Lecture Notes 2015/2016 Term 2 2 / 55 Menu January 7, 2016 Topics: Image
Image Formation. Dr. Gerhard Roth. COMP 4102A Winter 2015 Version 3
 Image Formation Dr. Gerhard Roth COMP 4102A Winter 2015 Version 3 1 Image Formation Two type of images Intensity image encodes light intensities (passive sensor) Range (depth) image encodes shape and distance
Image Formation Dr. Gerhard Roth COMP 4102A Winter 2015 Version 3 1 Image Formation Two type of images Intensity image encodes light intensities (passive sensor) Range (depth) image encodes shape and distance
Today. CS 395T Visual Recognition. Course content. Administration. Expectations. Paper reviews
 Today CS 395T Visual Recognition Course logistics Overview Volunteers, prep for next week Thursday, January 18 Administration Class: Tues / Thurs 12:30-2 PM Instructor: Kristen Grauman grauman at cs.utexas.edu
Today CS 395T Visual Recognition Course logistics Overview Volunteers, prep for next week Thursday, January 18 Administration Class: Tues / Thurs 12:30-2 PM Instructor: Kristen Grauman grauman at cs.utexas.edu
Image Formation III Chapter 1 (Forsyth&Ponce) Cameras Lenses & Sensors
 Cameras Lenses & Sensors") Image Formation III Chapter 1 (Forsyth&Ponce) Cameras Lenses & Sensors Guido Gerig CS-GY 6643, Spring 2017 (slides modified from Marc Pollefeys, UNC Chapel Hill/ ETH Zurich, With content from Prof. Trevor
Image Formation III Chapter 1 (Forsyth&Ponce) Cameras Lenses & Sensors Guido Gerig CS-GY 6643, Spring 2017 (slides modified from Marc Pollefeys, UNC Chapel Hill/ ETH Zurich, With content from Prof. Trevor
Image Formation. Dr. Gerhard Roth. COMP 4102A Winter 2014 Version 1
 Image Formation Dr. Gerhard Roth COMP 4102A Winter 2014 Version 1 Image Formation Two type of images Intensity image encodes light intensities (passive sensor) Range (depth) image encodes shape and distance
Image Formation Dr. Gerhard Roth COMP 4102A Winter 2014 Version 1 Image Formation Two type of images Intensity image encodes light intensities (passive sensor) Range (depth) image encodes shape and distance
Cameras. CSE 455, Winter 2010 January 25, 2010
 Cameras CSE 455, Winter 2010 January 25, 2010 Announcements New Lecturer! Neel Joshi, Ph.D. Post-Doctoral Researcher Microsoft Research neel@cs Project 1b (seam carving) was due on Friday the 22 nd Project
Cameras CSE 455, Winter 2010 January 25, 2010 Announcements New Lecturer! Neel Joshi, Ph.D. Post-Doctoral Researcher Microsoft Research neel@cs Project 1b (seam carving) was due on Friday the 22 nd Project
Colorado School of Mines. Computer Vision. Professor William Hoff Dept of Electrical Engineering &Computer Science.
 Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Sensors and Image Formation Imaging sensors and models of image formation Coordinate systems Digital
Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Sensors and Image Formation Imaging sensors and models of image formation Coordinate systems Digital
IMAGE FORMATION. Light source properties. Sensor characteristics Surface. Surface reflectance properties. Optics
 IMAGE FORMATION Light source properties Sensor characteristics Surface Exposure shape Optics Surface reflectance properties ANALOG IMAGES An image can be understood as a 2D light intensity function f(x,y)
IMAGE FORMATION Light source properties Sensor characteristics Surface Exposure shape Optics Surface reflectance properties ANALOG IMAGES An image can be understood as a 2D light intensity function f(x,y)
Lecture 02 Image Formation 1
 Institute of Informatics Institute of Neuroinformatics Lecture 02 Image Formation 1 Davide Scaramuzza http://rpg.ifi.uzh.ch 1 Lab Exercise 1 - Today afternoon Room ETH HG E 1.1 from 13:15 to 15:00 Work
Institute of Informatics Institute of Neuroinformatics Lecture 02 Image Formation 1 Davide Scaramuzza http://rpg.ifi.uzh.ch 1 Lab Exercise 1 - Today afternoon Room ETH HG E 1.1 from 13:15 to 15:00 Work
How do we see the world?
 The Camera 1 How do we see the world? Let s design a camera Idea 1: put a piece of film in front of an object Do we get a reasonable image? Credit: Steve Seitz 2 Pinhole camera Idea 2: Add a barrier to
The Camera 1 How do we see the world? Let s design a camera Idea 1: put a piece of film in front of an object Do we get a reasonable image? Credit: Steve Seitz 2 Pinhole camera Idea 2: Add a barrier to
Computer Vision. The Pinhole Camera Model
 Computer Vision The Pinhole Camera Model Filippo Bergamasco (filippo.bergamasco@unive.it) http://www.dais.unive.it/~bergamasco DAIS, Ca Foscari University of Venice Academic year 2017/2018 Imaging device
Computer Vision The Pinhole Camera Model Filippo Bergamasco (filippo.bergamasco@unive.it) http://www.dais.unive.it/~bergamasco DAIS, Ca Foscari University of Venice Academic year 2017/2018 Imaging device
Overview. Pinhole camera model Projective geometry Vanishing points and lines Projection matrix Cameras with Lenses Color Digital image
 Camera & Color Overview Pinhole camera model Projective geometry Vanishing points and lines Projection matrix Cameras with Lenses Color Digital image Book: Hartley 6.1, Szeliski 2.1.5, 2.2, 2.3 The trip
Camera & Color Overview Pinhole camera model Projective geometry Vanishing points and lines Projection matrix Cameras with Lenses Color Digital image Book: Hartley 6.1, Szeliski 2.1.5, 2.2, 2.3 The trip
VC 11/12 T2 Image Formation
 VC 11/12 T2 Image Formation Mestrado em Ciência de Computadores Mestrado Integrado em Engenharia de Redes e Sistemas Informáticos Miguel Tavares Coimbra Outline Computer Vision? The Human Visual System
VC 11/12 T2 Image Formation Mestrado em Ciência de Computadores Mestrado Integrado em Engenharia de Redes e Sistemas Informáticos Miguel Tavares Coimbra Outline Computer Vision? The Human Visual System
VC 14/15 TP2 Image Formation
 VC 14/15 TP2 Image Formation Mestrado em Ciência de Computadores Mestrado Integrado em Engenharia de Redes e Sistemas Informáticos Miguel Tavares Coimbra Outline Computer Vision? The Human Visual System
VC 14/15 TP2 Image Formation Mestrado em Ciência de Computadores Mestrado Integrado em Engenharia de Redes e Sistemas Informáticos Miguel Tavares Coimbra Outline Computer Vision? The Human Visual System
Today I t n d ro ucti tion to computer vision Course overview Course requirements
 COMP 776: Computer Vision Today Introduction ti to computer vision i Course overview Course requirements The goal of computer vision To extract t meaning from pixels What we see What a computer sees Source:
COMP 776: Computer Vision Today Introduction ti to computer vision i Course overview Course requirements The goal of computer vision To extract t meaning from pixels What we see What a computer sees Source:
ME 6406 MACHINE VISION. Georgia Institute of Technology
 ME 6406 MACHINE VISION Georgia Institute of Technology Class Information Instructor Professor Kok-Meng Lee MARC 474 Office hours: Tues/Thurs 1:00-2:00 pm kokmeng.lee@me.gatech.edu (404)-894-7402 Class
ME 6406 MACHINE VISION Georgia Institute of Technology Class Information Instructor Professor Kok-Meng Lee MARC 474 Office hours: Tues/Thurs 1:00-2:00 pm kokmeng.lee@me.gatech.edu (404)-894-7402 Class
CSE 527: Introduction to Computer Vision
 CSE 527: Introduction to Computer Vision Week 2 - Class 2: Vision, Physics, Cameras September 7th, 2017 Today Physics Human Vision Eye Brain Perspective Projection Camera Models Image Formation Digital
CSE 527: Introduction to Computer Vision Week 2 - Class 2: Vision, Physics, Cameras September 7th, 2017 Today Physics Human Vision Eye Brain Perspective Projection Camera Models Image Formation Digital
VC 16/17 TP2 Image Formation
 VC 16/17 TP2 Image Formation Mestrado em Ciência de Computadores Mestrado Integrado em Engenharia de Redes e Sistemas Informáticos Hélder Filipe Pinto de Oliveira Outline Computer Vision? The Human Visual
VC 16/17 TP2 Image Formation Mestrado em Ciência de Computadores Mestrado Integrado em Engenharia de Redes e Sistemas Informáticos Hélder Filipe Pinto de Oliveira Outline Computer Vision? The Human Visual
Projection. Announcements. Müller-Lyer Illusion. Image formation. Readings Nalwa 2.1
 Announcements Mailing list (you should have received messages) Project 1 additional test sequences online Projection Readings Nalwa 2.1 Müller-Lyer Illusion Image formation object film by Pravin Bhat http://www.michaelbach.de/ot/sze_muelue/index.html
Announcements Mailing list (you should have received messages) Project 1 additional test sequences online Projection Readings Nalwa 2.1 Müller-Lyer Illusion Image formation object film by Pravin Bhat http://www.michaelbach.de/ot/sze_muelue/index.html
Digital image processing vs. computer vision Higher-level anchoring
 Digital image processing vs. computer vision Higher-level anchoring Václav Hlaváč Czech Technical University in Prague Faculty of Electrical Engineering, Department of Cybernetics Center for Machine Perception
Digital image processing vs. computer vision Higher-level anchoring Václav Hlaváč Czech Technical University in Prague Faculty of Electrical Engineering, Department of Cybernetics Center for Machine Perception
CSE 473/573 Computer Vision and Image Processing (CVIP)
") CSE 473/573 Computer Vision and Image Processing (CVIP) Ifeoma Nwogu inwogu@buffalo.edu Lecture 4 Image formation(part I) Schedule Last class linear algebra overview Today Image formation and camera properties
CSE 473/573 Computer Vision and Image Processing (CVIP) Ifeoma Nwogu inwogu@buffalo.edu Lecture 4 Image formation(part I) Schedule Last class linear algebra overview Today Image formation and camera properties
Projection. Readings. Szeliski 2.1. Wednesday, October 23, 13
 Projection Readings Szeliski 2.1 Projection Readings Szeliski 2.1 Müller-Lyer Illusion by Pravin Bhat Müller-Lyer Illusion by Pravin Bhat http://www.michaelbach.de/ot/sze_muelue/index.html Müller-Lyer
Projection Readings Szeliski 2.1 Projection Readings Szeliski 2.1 Müller-Lyer Illusion by Pravin Bhat Müller-Lyer Illusion by Pravin Bhat http://www.michaelbach.de/ot/sze_muelue/index.html Müller-Lyer
Dr F. Cuzzolin 1. September 29, 2015
 P00407 Principles of Computer Vision 1 1 Department of Computing and Communication Technologies Oxford Brookes University, UK September 29, 2015 September 29, 2015 1 / 73 Outline of the Lecture 1 2 Basics
P00407 Principles of Computer Vision 1 1 Department of Computing and Communication Technologies Oxford Brookes University, UK September 29, 2015 September 29, 2015 1 / 73 Outline of the Lecture 1 2 Basics
Lecture 2 Camera Models
 Lecture 2 Camera Models Professor Silvio Savarese Computational Vision and Geometr Lab Silvio Savarese Lecture 2-4-Jan-4 Announcements Prerequisites: an questions? This course requires knowledge of linear
Lecture 2 Camera Models Professor Silvio Savarese Computational Vision and Geometr Lab Silvio Savarese Lecture 2-4-Jan-4 Announcements Prerequisites: an questions? This course requires knowledge of linear
Image Processing & Projective geometry
 Image Processing & Projective geometry Arunkumar Byravan Partial slides borrowed from Jianbo Shi & Steve Seitz Color spaces RGB Red, Green, Blue HSV Hue, Saturation, Value Why HSV? HSV separates luma,
Image Processing & Projective geometry Arunkumar Byravan Partial slides borrowed from Jianbo Shi & Steve Seitz Color spaces RGB Red, Green, Blue HSV Hue, Saturation, Value Why HSV? HSV separates luma,
Two strategies for realistic rendering capture real world data synthesize from bottom up
 Recap from Wednesday Two strategies for realistic rendering capture real world data synthesize from bottom up Both have existed for 500 years. Both are successful. Attempts to take the best of both world
Recap from Wednesday Two strategies for realistic rendering capture real world data synthesize from bottom up Both have existed for 500 years. Both are successful. Attempts to take the best of both world
Projection. Projection. Image formation. Müller-Lyer Illusion. Readings. Readings. Let s design a camera. Szeliski 2.1. Szeliski 2.
 Projection Projection Readings Szeliski 2.1 Readings Szeliski 2.1 Müller-Lyer Illusion Image formation object film by Pravin Bhat http://www.michaelbach.de/ot/sze_muelue/index.html Let s design a camera
Projection Projection Readings Szeliski 2.1 Readings Szeliski 2.1 Müller-Lyer Illusion Image formation object film by Pravin Bhat http://www.michaelbach.de/ot/sze_muelue/index.html Let s design a camera
The Camera : Computational Photography Alexei Efros, CMU, Fall 2005
 The Camera 15-463: Computational Photography Alexei Efros, CMU, Fall 2005 How do we see the world? object film Let s design a camera Idea 1: put a piece of film in front of an object Do we get a reasonable
The Camera 15-463: Computational Photography Alexei Efros, CMU, Fall 2005 How do we see the world? object film Let s design a camera Idea 1: put a piece of film in front of an object Do we get a reasonable
Announcements. Image Formation: Outline. The course. How Cameras Produce Images. Earliest Surviving Photograph. Image Formation and Cameras
 Announcements Image ormation and Cameras CSE 252A Lecture 3 Assignment 0: Getting Started with Matlab is posted to web page, due Tuesday, ctober 4. Reading: Szeliski, Chapter 2 ptional Chapters 1 & 2 of
Announcements Image ormation and Cameras CSE 252A Lecture 3 Assignment 0: Getting Started with Matlab is posted to web page, due Tuesday, ctober 4. Reading: Szeliski, Chapter 2 ptional Chapters 1 & 2 of
6.098 Digital and Computational Photography Advanced Computational Photography. Bill Freeman Frédo Durand MIT - EECS
 6.098 Digital and Computational Photography 6.882 Advanced Computational Photography Bill Freeman Frédo Durand MIT - EECS Administrivia PSet 1 is out Due Thursday February 23 Digital SLR initiation? During
6.098 Digital and Computational Photography 6.882 Advanced Computational Photography Bill Freeman Frédo Durand MIT - EECS Administrivia PSet 1 is out Due Thursday February 23 Digital SLR initiation? During
Image formation - Cameras. Grading & Project. About the course. Tentative Schedule. Course Content. Students introduction
 About the course Instructors: Haibin Ling (hbling@temple, Wachman 35) Hours Lecture: Tuesda 5:3-8:pm, TTLMAN 43B Office hour: Tuesda 3: - 5:pm, or b appointment Textbook Computer Vision: Models, Learning,
About the course Instructors: Haibin Ling (hbling@temple, Wachman 35) Hours Lecture: Tuesda 5:3-8:pm, TTLMAN 43B Office hour: Tuesda 3: - 5:pm, or b appointment Textbook Computer Vision: Models, Learning,
Spring 2018 CS543 / ECE549 Computer Vision. Course webpage URL:
 Spring 2018 CS543 / ECE549 Computer Vision Course webpage URL: http://slazebni.cs.illinois.edu/spring18/ The goal of computer vision To extract meaning from pixels What we see What a computer sees Source:
Spring 2018 CS543 / ECE549 Computer Vision Course webpage URL: http://slazebni.cs.illinois.edu/spring18/ The goal of computer vision To extract meaning from pixels What we see What a computer sees Source:
Digital Image Processing COSC 6380/4393
 Digital Image Processing COSC 6380/4393 Lecture 2 Aug 24 th, 2017 Slides from Dr. Shishir K Shah, Rajesh Rao and Frank (Qingzhong) Liu 1 Instructor TA Digital Image Processing COSC 6380/4393 Pranav Mantini
Digital Image Processing COSC 6380/4393 Lecture 2 Aug 24 th, 2017 Slides from Dr. Shishir K Shah, Rajesh Rao and Frank (Qingzhong) Liu 1 Instructor TA Digital Image Processing COSC 6380/4393 Pranav Mantini
Image Formation: Camera Model
 Image Formation: Camera Model Ruigang Yang COMP 684 Fall 2005, CS684-IBMR Outline Camera Models Pinhole Perspective Projection Affine Projection Camera with Lenses Digital Image Formation The Human Eye
Image Formation: Camera Model Ruigang Yang COMP 684 Fall 2005, CS684-IBMR Outline Camera Models Pinhole Perspective Projection Affine Projection Camera with Lenses Digital Image Formation The Human Eye
Image Formation. World Optics Sensor Signal. Computer Vision. Introduction to. Light (Energy) Source. Surface Imaging Plane. Pinhole Lens.
 Source. Surface Imaging Plane. Pinhole Lens.") Image Formation Light (Energy) Source Surface Imaging Plane Pinhole Lens World Optics Sensor Signal B&W Film Color Film TV Camera Silver Density Silver density in three color layers Electrical Today Optics:
Image Formation Light (Energy) Source Surface Imaging Plane Pinhole Lens World Optics Sensor Signal B&W Film Color Film TV Camera Silver Density Silver density in three color layers Electrical Today Optics:
MEM455/800 Robotics II/Advance Robotics Winter 2009
 Admin Stuff Course Website: http://robotics.mem.drexel.edu/mhsieh/courses/mem456/ MEM455/8 Robotics II/Advance Robotics Winter 9 Professor: Ani Hsieh Time: :-:pm Tues, Thurs Location: UG Lab, Classroom
Admin Stuff Course Website: http://robotics.mem.drexel.edu/mhsieh/courses/mem456/ MEM455/8 Robotics II/Advance Robotics Winter 9 Professor: Ani Hsieh Time: :-:pm Tues, Thurs Location: UG Lab, Classroom
Lecture 19: Depth Cameras. Kayvon Fatahalian CMU : Graphics and Imaging Architectures (Fall 2011)
") Lecture 19: Depth Cameras Kayvon Fatahalian CMU 15-869: Graphics and Imaging Architectures (Fall 2011) Continuing theme: computational photography Cheap cameras capture light, extensive processing produces
Lecture 19: Depth Cameras Kayvon Fatahalian CMU 15-869: Graphics and Imaging Architectures (Fall 2011) Continuing theme: computational photography Cheap cameras capture light, extensive processing produces
CS6670: Computer Vision
 CS6670: Computer Vision Noah Snavely Lecture 5: Cameras and Projection Szeliski 2.1.3-2.1.6 Reading Announcements Project 1 assigned, see projects page: http://www.cs.cornell.edu/courses/cs6670/2011sp/projects/projects.html
CS6670: Computer Vision Noah Snavely Lecture 5: Cameras and Projection Szeliski 2.1.3-2.1.6 Reading Announcements Project 1 assigned, see projects page: http://www.cs.cornell.edu/courses/cs6670/2011sp/projects/projects.html
The Camera : Computational Photography Alexei Efros, CMU, Fall 2008
 The Camera 15-463: Computational Photography Alexei Efros, CMU, Fall 2008 How do we see the world? object film Let s design a camera Idea 1: put a piece of film in front of an object Do we get a reasonable
The Camera 15-463: Computational Photography Alexei Efros, CMU, Fall 2008 How do we see the world? object film Let s design a camera Idea 1: put a piece of film in front of an object Do we get a reasonable
Digital Image Processing COSC 6380/4393
 Digital Image Processing COSC 6380/4393 Lecture 2 Aug 23 rd, 2018 Slides from Dr. Shishir K Shah, Rajesh Rao and Frank (Qingzhong) Liu 1 Instructor Digital Image Processing COSC 6380/4393 Pranav Mantini
Digital Image Processing COSC 6380/4393 Lecture 2 Aug 23 rd, 2018 Slides from Dr. Shishir K Shah, Rajesh Rao and Frank (Qingzhong) Liu 1 Instructor Digital Image Processing COSC 6380/4393 Pranav Mantini
To Do. Advanced Computer Graphics. Outline. Computational Imaging. How do we see the world? Pinhole camera
 Advanced Computer Graphics CSE 163 [Spring 2017], Lecture 14 Ravi Ramamoorthi http://www.cs.ucsd.edu/~ravir To Do Assignment 2 due May 19 Any last minute issues or questions? Next two lectures: Imaging,
Advanced Computer Graphics CSE 163 [Spring 2017], Lecture 14 Ravi Ramamoorthi http://www.cs.ucsd.edu/~ravir To Do Assignment 2 due May 19 Any last minute issues or questions? Next two lectures: Imaging,
Range Sensing strategies
 Range Sensing strategies Active range sensors Ultrasound Laser range sensor Slides adopted from Siegwart and Nourbakhsh 4.1.6 Range Sensors (time of flight) (1) Large range distance measurement -> called
Range Sensing strategies Active range sensors Ultrasound Laser range sensor Slides adopted from Siegwart and Nourbakhsh 4.1.6 Range Sensors (time of flight) (1) Large range distance measurement -> called
Computer Vision Slides curtesy of Professor Gregory Dudek
 Computer Vision Slides curtesy of Professor Gregory Dudek Ioannis Rekleitis Why vision? Passive (emits nothing). Discreet. Energy efficient. Intuitive. Powerful (works well for us, right?) Long and short
Computer Vision Slides curtesy of Professor Gregory Dudek Ioannis Rekleitis Why vision? Passive (emits nothing). Discreet. Energy efficient. Intuitive. Powerful (works well for us, right?) Long and short
FOCAL LENGTH CHANGE COMPENSATION FOR MONOCULAR SLAM
 FOCAL LENGTH CHANGE COMPENSATION FOR MONOCULAR SLAM Takafumi Taketomi Nara Institute of Science and Technology, Japan Janne Heikkilä University of Oulu, Finland ABSTRACT In this paper, we propose a method
FOCAL LENGTH CHANGE COMPENSATION FOR MONOCULAR SLAM Takafumi Taketomi Nara Institute of Science and Technology, Japan Janne Heikkilä University of Oulu, Finland ABSTRACT In this paper, we propose a method
Computational Photography and Video. Prof. Marc Pollefeys
 Computational Photography and Video Prof. Marc Pollefeys Today s schedule Introduction of Computational Photography Course facts Syllabus Digital Photography What is computational photography Convergence
Computational Photography and Video Prof. Marc Pollefeys Today s schedule Introduction of Computational Photography Course facts Syllabus Digital Photography What is computational photography Convergence
Practical Image and Video Processing Using MATLAB
 Practical Image and Video Processing Using MATLAB Chapter 1 Introduction and overview What will we learn? What is image processing? What are the main applications of image processing? What is an image?
Practical Image and Video Processing Using MATLAB Chapter 1 Introduction and overview What will we learn? What is image processing? What are the main applications of image processing? What is an image?
LENSES. INEL 6088 Computer Vision
 LENSES INEL 6088 Computer Vision Digital camera A digital camera replaces film with a sensor array Each cell in the array is a Charge Coupled Device light-sensitive diode that converts photons to electrons
LENSES INEL 6088 Computer Vision Digital camera A digital camera replaces film with a sensor array Each cell in the array is a Charge Coupled Device light-sensitive diode that converts photons to electrons
DIGITAL IMAGE PROCESSING
 DIGITAL IMAGE PROCESSING Lecture 1 Introduction Tammy Riklin Raviv Electrical and Computer Engineering Ben-Gurion University of the Negev 2 Introduction to Digital Image Processing Lecturer: Dr. Tammy
DIGITAL IMAGE PROCESSING Lecture 1 Introduction Tammy Riklin Raviv Electrical and Computer Engineering Ben-Gurion University of the Negev 2 Introduction to Digital Image Processing Lecturer: Dr. Tammy
COMP 776: Computer Vision
 COMP 776: Computer Vision Basic Info Instructor: Svetlana Lazebnik (lazebnik@cs.unc.edu) Office hours: By appointment, FB 244 Textbook (recommended): Forsyth & Ponce, Computer Vision: A Modern Approach
COMP 776: Computer Vision Basic Info Instructor: Svetlana Lazebnik (lazebnik@cs.unc.edu) Office hours: By appointment, FB 244 Textbook (recommended): Forsyth & Ponce, Computer Vision: A Modern Approach
CSCE 763: Digital Image Processing
 CSCE 763: Digital Image Processing Spring 2018 Yan Tong Department of Computer Science and Engineering University of South Carolina Today s Agenda Welcome Tentative Syllabus Topics covered in the course
CSCE 763: Digital Image Processing Spring 2018 Yan Tong Department of Computer Science and Engineering University of South Carolina Today s Agenda Welcome Tentative Syllabus Topics covered in the course
CS 376b Computer Vision
 CS 376b Computer Vision 09 / 03 / 2014 Instructor: Michael Eckmann Today s Topics This is technically a lab/discussion session, but I'll treat it as a lecture today. Introduction to the course layout,
CS 376b Computer Vision 09 / 03 / 2014 Instructor: Michael Eckmann Today s Topics This is technically a lab/discussion session, but I'll treat it as a lecture today. Introduction to the course layout,
Computer Vision Introduction or
 Computer Vision Introduction http://www.ugrad.cs.jhu.edu/~cs461 or http://cirl.lcsr.jhu.edu/vision_syllabus Professor Hager http://www.cs.jhu.edu/~hager Outline for Today Outline and Organization of the
Computer Vision Introduction http://www.ugrad.cs.jhu.edu/~cs461 or http://cirl.lcsr.jhu.edu/vision_syllabus Professor Hager http://www.cs.jhu.edu/~hager Outline for Today Outline and Organization of the
Course Syllabus OSE 3200 Geometric Optics
 Course Syllabus OSE 3200 Geometric Optics Instructor: Dr. Kyle Renshaw Term: Fall 2016 Email: krenshaw@creol.ucf.edu Class Meeting Days: Monday/Wednesday Phone: 407-823-2807 Class Meeting Time: 10:30-11:45AM
Course Syllabus OSE 3200 Geometric Optics Instructor: Dr. Kyle Renshaw Term: Fall 2016 Email: krenshaw@creol.ucf.edu Class Meeting Days: Monday/Wednesday Phone: 407-823-2807 Class Meeting Time: 10:30-11:45AM
ECEN 4606, UNDERGRADUATE OPTICS LAB
 ECEN 4606, UNDERGRADUATE OPTICS LAB Lab 2: Imaging 1 the Telescope Original Version: Prof. McLeod SUMMARY: In this lab you will become familiar with the use of one or more lenses to create images of distant
ECEN 4606, UNDERGRADUATE OPTICS LAB Lab 2: Imaging 1 the Telescope Original Version: Prof. McLeod SUMMARY: In this lab you will become familiar with the use of one or more lenses to create images of distant
Single-view Metrology and Cameras
 Single-view Metrology and Cameras 10/10/17 Computational Photography Derek Hoiem, University of Illinois Project 2 Results Incomplete list of great project pages Haohang Huang: Best presented project;
Single-view Metrology and Cameras 10/10/17 Computational Photography Derek Hoiem, University of Illinois Project 2 Results Incomplete list of great project pages Haohang Huang: Best presented project;
TSBB09 Image Sensors 2018-HT2. Image Formation Part 1
 TSBB09 Image Sensors 2018-HT2 Image Formation Part 1 Basic physics Electromagnetic radiation consists of electromagnetic waves With energy That propagate through space The waves consist of transversal
TSBB09 Image Sensors 2018-HT2 Image Formation Part 1 Basic physics Electromagnetic radiation consists of electromagnetic waves With energy That propagate through space The waves consist of transversal
MIT CSAIL Advances in Computer Vision Fall Problem Set 6: Anaglyph Camera Obscura
 MIT CSAIL 6.869 Advances in Computer Vision Fall 2013 Problem Set 6: Anaglyph Camera Obscura Posted: Tuesday, October 8, 2013 Due: Thursday, October 17, 2013 You should submit a hard copy of your work
MIT CSAIL 6.869 Advances in Computer Vision Fall 2013 Problem Set 6: Anaglyph Camera Obscura Posted: Tuesday, October 8, 2013 Due: Thursday, October 17, 2013 You should submit a hard copy of your work
Building a Real Camera. Slides Credit: Svetlana Lazebnik
 Building a Real Camera Slides Credit: Svetlana Lazebnik Home-made pinhole camera Slide by A. Efros http://www.debevec.org/pinhole/ Shrinking the aperture Why not make the aperture as small as possible?
Building a Real Camera Slides Credit: Svetlana Lazebnik Home-made pinhole camera Slide by A. Efros http://www.debevec.org/pinhole/ Shrinking the aperture Why not make the aperture as small as possible?
Intorduction to light sources, pinhole cameras, and lenses
 Intorduction to light sources, pinhole cameras, and lenses Erik G. Learned-Miller Department of Computer Science University of Massachusetts, Amherst Amherst, MA 01003 October 26, 2011 Abstract 1 1 Analyzing
Intorduction to light sources, pinhole cameras, and lenses Erik G. Learned-Miller Department of Computer Science University of Massachusetts, Amherst Amherst, MA 01003 October 26, 2011 Abstract 1 1 Analyzing
ELE 882: Introduction to Digital Image Processing (DIP)
") ELE882 Introduction to Digital Image Processing Course Instructor: Prof. Ling Guan Department of Electrical & Computer Engineering Room 315, ENG Building Tel: (416)979-5000 ext 6072 Email: lguan@ee.ryerson.ca
ELE882 Introduction to Digital Image Processing Course Instructor: Prof. Ling Guan Department of Electrical & Computer Engineering Room 315, ENG Building Tel: (416)979-5000 ext 6072 Email: lguan@ee.ryerson.ca
A Geometric Correction Method of Plane Image Based on OpenCV
 Sensors & Transducers 204 by IFSA Publishing, S. L. http://www.sensorsportal.com A Geometric orrection Method of Plane Image ased on OpenV Li Xiaopeng, Sun Leilei, 2 Lou aiying, Liu Yonghong ollege of
Sensors & Transducers 204 by IFSA Publishing, S. L. http://www.sensorsportal.com A Geometric orrection Method of Plane Image ased on OpenV Li Xiaopeng, Sun Leilei, 2 Lou aiying, Liu Yonghong ollege of
Background. Computer Vision & Digital Image Processing. Improved Bartlane transmitted image. Example Bartlane transmitted image
 Background Computer Vision & Digital Image Processing Introduction to Digital Image Processing Interest comes from two primary backgrounds Improvement of pictorial information for human perception How
Background Computer Vision & Digital Image Processing Introduction to Digital Image Processing Interest comes from two primary backgrounds Improvement of pictorial information for human perception How
Digital Image Processing
 Part 1: Course Introduction Achim J. Lilienthal AASS Learning Systems Lab, Dep. Teknik Room T1209 (Fr, 11-12 o'clock) achim.lilienthal@oru.se Course Book Chapters 1 & 2 2011-04-05 Contents 1. Introduction
Part 1: Course Introduction Achim J. Lilienthal AASS Learning Systems Lab, Dep. Teknik Room T1209 (Fr, 11-12 o'clock) achim.lilienthal@oru.se Course Book Chapters 1 & 2 2011-04-05 Contents 1. Introduction
GEOMETRICAL OPTICS AND OPTICAL DESIGN
 GEOMETRICAL OPTICS AND OPTICAL DESIGN Pantazis Mouroulis Associate Professor Center for Imaging Science Rochester Institute of Technology John Macdonald Senior Lecturer Physics Department University of
GEOMETRICAL OPTICS AND OPTICAL DESIGN Pantazis Mouroulis Associate Professor Center for Imaging Science Rochester Institute of Technology John Macdonald Senior Lecturer Physics Department University of
Introduction. BIL719 Computer Vision Pinar Duygulu Hacettepe University
 Introduction BIL719 Computer Vision Pinar Duygulu Hacettepe University Basic Info Textbooks (suggested): Forsyth & Ponce, Computer Vision: A Modern Approach Richard Szeliski, Computer Vision: Algorithms
Introduction BIL719 Computer Vision Pinar Duygulu Hacettepe University Basic Info Textbooks (suggested): Forsyth & Ponce, Computer Vision: A Modern Approach Richard Szeliski, Computer Vision: Algorithms
CSE 473/573 Computer Vision and Image Processing (CVIP) Ifeoma Nwogu
 Ifeoma Nwogu") CSE 473/573 Computer Vision and Image Processing (CVIP) Ifeoma Nwogu inwogu@buffalo.edu Today Logistics Schedule Introductions What is computer vision? Why is vision so hard? Prerequisites This course
CSE 473/573 Computer Vision and Image Processing (CVIP) Ifeoma Nwogu inwogu@buffalo.edu Today Logistics Schedule Introductions What is computer vision? Why is vision so hard? Prerequisites This course
Image Formation. Light from distant things. Geometrical optics. Pinhole camera. Chapter 36
 Light from distant things Chapter 36 We learn about a distant thing from the light it generates or redirects. The lenses in our eyes create images of objects our brains can process. This chapter concerns
Light from distant things Chapter 36 We learn about a distant thing from the light it generates or redirects. The lenses in our eyes create images of objects our brains can process. This chapter concerns
Cameras, lenses and sensors
 Cameras, lenses and sensors Marc Pollefeys COMP 256 Cameras, lenses and sensors Camera Models Pinhole Perspective Projection Affine Projection Camera with Lenses Sensing The Human Eye Reading: Chapter.
Cameras, lenses and sensors Marc Pollefeys COMP 256 Cameras, lenses and sensors Camera Models Pinhole Perspective Projection Affine Projection Camera with Lenses Sensing The Human Eye Reading: Chapter.
Princeton University COS429 Computer Vision Problem Set 1: Building a Camera
 Princeton University COS429 Computer Vision Problem Set 1: Building a Camera What to submit: You need to submit two files: one PDF file for the report that contains your name, Princeton NetID, all the
Princeton University COS429 Computer Vision Problem Set 1: Building a Camera What to submit: You need to submit two files: one PDF file for the report that contains your name, Princeton NetID, all the
Course Syllabus OSE 3200 Geometric Optics
 Course Syllabus OSE 3200 Geometric Optics Instructor: Dr. Kyu Young Han Term: Spring 2018 Email: kyhan@creol.ucf.edu Class Meeting Days: Monday/Wednesday Phone: 407-823-6922 Class Meeting Time: 09:00-10:15AM
Course Syllabus OSE 3200 Geometric Optics Instructor: Dr. Kyu Young Han Term: Spring 2018 Email: kyhan@creol.ucf.edu Class Meeting Days: Monday/Wednesday Phone: 407-823-6922 Class Meeting Time: 09:00-10:15AM
Cameras. Steve Rotenberg CSE168: Rendering Algorithms UCSD, Spring 2017
 Cameras Steve Rotenberg CSE168: Rendering Algorithms UCSD, Spring 2017 Camera Focus Camera Focus So far, we have been simulating pinhole cameras with perfect focus Often times, we want to simulate more
Cameras Steve Rotenberg CSE168: Rendering Algorithms UCSD, Spring 2017 Camera Focus Camera Focus So far, we have been simulating pinhole cameras with perfect focus Often times, we want to simulate more
Single Camera Catadioptric Stereo System
 Single Camera Catadioptric Stereo System Abstract In this paper, we present a framework for novel catadioptric stereo camera system that uses a single camera and a single lens with conic mirrors. Various
Single Camera Catadioptric Stereo System Abstract In this paper, we present a framework for novel catadioptric stereo camera system that uses a single camera and a single lens with conic mirrors. Various
Exercise questions for Machine vision
 Exercise questions for Machine vision This is a collection of exercise questions. These questions are all examination alike which means that similar questions may appear at the written exam. I ve divided
Exercise questions for Machine vision This is a collection of exercise questions. These questions are all examination alike which means that similar questions may appear at the written exam. I ve divided
Lecture 2 Camera Models
 Lecture 2 Camera Models Professor Silvio Savarese Computational Vision and Geometr Lab Silvio Savarese Lecture 2 - -Jan-8 Lecture 2 Camera Models Pinhole cameras Cameras lenses The geometr of pinhole cameras
Lecture 2 Camera Models Professor Silvio Savarese Computational Vision and Geometr Lab Silvio Savarese Lecture 2 - -Jan-8 Lecture 2 Camera Models Pinhole cameras Cameras lenses The geometr of pinhole cameras
College of Optics & Photonics
 C College of Optics & Photonics Time: Location: Credit Hours: Prerequisite: Description: Instructor: Office Hours: Fall 2014 OSE-5203 Geometrical Optics and Imaging Science Class Website: Monday and Wednesday
C College of Optics & Photonics Time: Location: Credit Hours: Prerequisite: Description: Instructor: Office Hours: Fall 2014 OSE-5203 Geometrical Optics and Imaging Science Class Website: Monday and Wednesday
Chapter 23. Light Geometric Optics
 Chapter 23. Light Geometric Optics There are 3 basic ways to gather light and focus it to make an image. Pinhole - Simple geometry Mirror - Reflection Lens - Refraction Pinhole Camera Image Formation (the
Chapter 23. Light Geometric Optics There are 3 basic ways to gather light and focus it to make an image. Pinhole - Simple geometry Mirror - Reflection Lens - Refraction Pinhole Camera Image Formation (the
Chapter 36. Image Formation
 Chapter 36 Image Formation Image of Formation Images can result when light rays encounter flat or curved surfaces between two media. Images can be formed either by reflection or refraction due to these
Chapter 36 Image Formation Image of Formation Images can result when light rays encounter flat or curved surfaces between two media. Images can be formed either by reflection or refraction due to these
Image Formation and Capture
 Figure credits: B. Curless, E. Hecht, W.J. Smith, B.K.P. Horn, A. Theuwissen, and J. Malik Image Formation and Capture COS 429: Computer Vision Image Formation and Capture Real world Optics Sensor Devices
Figure credits: B. Curless, E. Hecht, W.J. Smith, B.K.P. Horn, A. Theuwissen, and J. Malik Image Formation and Capture COS 429: Computer Vision Image Formation and Capture Real world Optics Sensor Devices
Cameras, lenses, and sensors
 Cameras, lenses, and sensors Reading: Chapter 1, Forsyth & Ponce Optional: Section 2.1, 2.3, Horn. 6.801/6.866 Profs. Bill Freeman and Trevor Darrell Sept. 10, 2002 Today s lecture How many people would
Cameras, lenses, and sensors Reading: Chapter 1, Forsyth & Ponce Optional: Section 2.1, 2.3, Horn. 6.801/6.866 Profs. Bill Freeman and Trevor Darrell Sept. 10, 2002 Today s lecture How many people would
3D Viewing. Introduction to Computer Graphics Torsten Möller / Manfred Klaffenböck. Machiraju/Zhang/Möller
 3D Viewing Introduction to Computer Graphics Torsten Möller / Manfred Klaffenböck Machiraju/Zhang/Möller Reading Chapter 5 of Angel Chapter 13 of Hughes, van Dam, Chapter 7 of Shirley+Marschner Machiraju/Zhang/Möller
3D Viewing Introduction to Computer Graphics Torsten Möller / Manfred Klaffenböck Machiraju/Zhang/Möller Reading Chapter 5 of Angel Chapter 13 of Hughes, van Dam, Chapter 7 of Shirley+Marschner Machiraju/Zhang/Möller
CIS581: Computer Vision and Computational Photography Homework: Cameras and Convolution Due: Sept. 14, 2017 at 3:00 pm
 CIS58: Computer Vision and Computational Photography Homework: Cameras and Convolution Due: Sept. 4, 207 at 3:00 pm Instructions This is an individual assignment. Individual means each student must hand
CIS58: Computer Vision and Computational Photography Homework: Cameras and Convolution Due: Sept. 4, 207 at 3:00 pm Instructions This is an individual assignment. Individual means each student must hand
Lecture 8 Camera Models
 Lecture 8 Caera Models Professor Silvio Savarese Coputational Vision and Geoetr Lab Silvio Savarese Lecture 8-5-Oct-4 Lecture 8 Caera Models Pinhole caeras Caeras & lenses The geoetr of pinhole caeras
Lecture 8 Caera Models Professor Silvio Savarese Coputational Vision and Geoetr Lab Silvio Savarese Lecture 8-5-Oct-4 Lecture 8 Caera Models Pinhole caeras Caeras & lenses The geoetr of pinhole caeras
Lecture 1 Introduction to Computer Vision. Lin ZHANG, PhD School of Software Engineering, Tongji University Spring 2014
 Lecture 1 Introduction to Computer Vision Lin ZHANG, PhD School of Software Engineering, Tongji University Spring 2014 Course Info Contact Information Room 314, Jishi Building Email: cslinzhang@tongji.edu.cn
Lecture 1 Introduction to Computer Vision Lin ZHANG, PhD School of Software Engineering, Tongji University Spring 2014 Course Info Contact Information Room 314, Jishi Building Email: cslinzhang@tongji.edu.cn
EC-433 Digital Image Processing
 EC-433 Digital Image Processing Lecture 2 Digital Image Fundamentals Dr. Arslan Shaukat 1 Fundamental Steps in DIP Image Acquisition An image is captured by a sensor (such as a monochrome or color TV camera)
EC-433 Digital Image Processing Lecture 2 Digital Image Fundamentals Dr. Arslan Shaukat 1 Fundamental Steps in DIP Image Acquisition An image is captured by a sensor (such as a monochrome or color TV camera)
CPSC 4040/6040 Computer Graphics Images. Joshua Levine
 CPSC 4040/6040 Computer Graphics Images Joshua Levine levinej@clemson.edu Lecture 04 Displays and Optics Sept. 1, 2015 Slide Credits: Kenny A. Hunt Don House Torsten Möller Hanspeter Pfister Agenda Open
CPSC 4040/6040 Computer Graphics Images Joshua Levine levinej@clemson.edu Lecture 04 Displays and Optics Sept. 1, 2015 Slide Credits: Kenny A. Hunt Don House Torsten Möller Hanspeter Pfister Agenda Open
Perspective. Cornell CS4620/5620 Fall 2012 Lecture Kavita Bala 1 (with previous instructors James/Marschner)
") CS4620/5620: Lecture 6 Perspective 1 Announcements HW 1 out Due in two weeks (Mon 9/17) Due right before class Turn it in online AND in class (preferably) 2 Transforming normal vectors Transforming surface
CS4620/5620: Lecture 6 Perspective 1 Announcements HW 1 out Due in two weeks (Mon 9/17) Due right before class Turn it in online AND in class (preferably) 2 Transforming normal vectors Transforming surface
Building a Real Camera
 Building a Real Camera Home-made pinhole camera Slide by A. Efros http://www.debevec.org/pinhole/ Shrinking the aperture Why not make the aperture as small as possible? Less light gets through Diffraction
Building a Real Camera Home-made pinhole camera Slide by A. Efros http://www.debevec.org/pinhole/ Shrinking the aperture Why not make the aperture as small as possible? Less light gets through Diffraction
Opto Engineering S.r.l.
 TUTORIAL #1 Telecentric Lenses: basic information and working principles On line dimensional control is one of the most challenging and difficult applications of vision systems. On the other hand, besides
TUTORIAL #1 Telecentric Lenses: basic information and working principles On line dimensional control is one of the most challenging and difficult applications of vision systems. On the other hand, besides
Lecture 1 Introduction to Computer Vision. Lin ZHANG, PhD School of Software Engineering, Tongji University Spring 2015
 Lecture 1 Introduction to Computer Vision Lin ZHANG, PhD School of Software Engineering, Tongji University Spring 2015 Course Info Contact Information Room 314, Jishi Building Email: cslinzhang@tongji.edu.cn
Lecture 1 Introduction to Computer Vision Lin ZHANG, PhD School of Software Engineering, Tongji University Spring 2015 Course Info Contact Information Room 314, Jishi Building Email: cslinzhang@tongji.edu.cn
Focus on an optical blind spot A closer look at lenses and the basics of CCTV optical performances,
 Focus on an optical blind spot A closer look at lenses and the basics of CCTV optical performances, by David Elberbaum M any security/cctv installers and dealers wish to know more about lens basics, lens
Focus on an optical blind spot A closer look at lenses and the basics of CCTV optical performances, by David Elberbaum M any security/cctv installers and dealers wish to know more about lens basics, lens
Image Processing - Intro. Tamás Szirányi
 Image Processing - Intro Tamás Szirányi The path of light through optics A Brief History of Images 1558 Camera Obscura, Gemma Frisius, 1558 A Brief History of Images 1558 1568 Lens Based Camera Obscura,
Image Processing - Intro Tamás Szirányi The path of light through optics A Brief History of Images 1558 Camera Obscura, Gemma Frisius, 1558 A Brief History of Images 1558 1568 Lens Based Camera Obscura,
LENSLESS IMAGING BY COMPRESSIVE SENSING
 LENSLESS IMAGING BY COMPRESSIVE SENSING Gang Huang, Hong Jiang, Kim Matthews and Paul Wilford Bell Labs, Alcatel-Lucent, Murray Hill, NJ 07974 ABSTRACT In this paper, we propose a lensless compressive
LENSLESS IMAGING BY COMPRESSIVE SENSING Gang Huang, Hong Jiang, Kim Matthews and Paul Wilford Bell Labs, Alcatel-Lucent, Murray Hill, NJ 07974 ABSTRACT In this paper, we propose a lensless compressive
Outline. Image formation: the pinhole camera model Images as functions Digital images Color, light and shading. Reading: textbook: 2.1, 2.2, 2.
 Image Basics 1 Outline Image formation: the pinhole camera model Images as functions Digital images Color, light and shading Reading: textbook: 2.1, 2.2, 2.4 2 Image formation Images are acquired through
Image Basics 1 Outline Image formation: the pinhole camera model Images as functions Digital images Color, light and shading Reading: textbook: 2.1, 2.2, 2.4 2 Image formation Images are acquired through
Introduction. Ioannis Rekleitis
 Introduction Ioannis Rekleitis Why Image Processing? Who here has a camera? How many cameras do you have Point where computers fast/cheap Cameras become omnipresent Deep Learning CSCE 590: Introduction
Introduction Ioannis Rekleitis Why Image Processing? Who here has a camera? How many cameras do you have Point where computers fast/cheap Cameras become omnipresent Deep Learning CSCE 590: Introduction
Virtual and Digital Cameras
 CS148: Introduction to Computer Graphics and Imaging Virtual and Digital Cameras Ansel Adams Topics Effect Cause Field of view Film size, focal length Perspective Lens, focal length Focus Dist. of lens
CS148: Introduction to Computer Graphics and Imaging Virtual and Digital Cameras Ansel Adams Topics Effect Cause Field of view Film size, focal length Perspective Lens, focal length Focus Dist. of lens
CS6670: Computer Vision
 CS6670: Computer Vision Noah Snavely Lecture 4a: Cameras Source: S. Lazebnik Reading Szeliski chapter 2.2.3, 2.3 Image formation Let s design a camera Idea 1: put a piece of film in front of an object
CS6670: Computer Vision Noah Snavely Lecture 4a: Cameras Source: S. Lazebnik Reading Szeliski chapter 2.2.3, 2.3 Image formation Let s design a camera Idea 1: put a piece of film in front of an object
Spherical Mirrors. Concave Mirror, Notation. Spherical Aberration. Image Formed by a Concave Mirror. Image Formed by a Concave Mirror 4/11/2014
 Notation for Mirrors and Lenses Chapter 23 Mirrors and Lenses The object distance is the distance from the object to the mirror or lens Denoted by p The image distance is the distance from the image to
Notation for Mirrors and Lenses Chapter 23 Mirrors and Lenses The object distance is the distance from the object to the mirror or lens Denoted by p The image distance is the distance from the image to
Physics 4L Spring 2010 Problem set 1 Due Tuesday 26 January in class
 Physics 4L Spring 2010 Problem set 1 Due Tuesday 26 January in class From Wolfson: Chapter 30 problem 36 (the flashlight beam comes out of the water some distance from the edge of the lake; the figure
Physics 4L Spring 2010 Problem set 1 Due Tuesday 26 January in class From Wolfson: Chapter 30 problem 36 (the flashlight beam comes out of the water some distance from the edge of the lake; the figure