Introduction. BIL719 Computer Vision Pinar Duygulu Hacettepe University
|
|
|
- Blake Morrison
- 5 years ago
- Views:
Transcription
1 Introduction BIL719 Computer Vision Pinar Duygulu Hacettepe University


2 Basic Info Textbooks (suggested): Forsyth & Ponce, Computer Vision: A Modern Approach Richard Szeliski, Computer Vision: Algorithms and Applications (available online)
3 Course requirements Homeworks 50% Quizzes 20% Project 30 %









4 Source: Svetlana Lazebnik, UIUC Why study computer vision?

5 Why study computer vision? An image is worth 1000 words Images and movies are everywhere Source: Fei Fei Li, Stanford University


6 Massive amounts of visual data For YouTube alone More than 1 billion unique users Hundreds of millions of hours are watched every day 300 hours of video are uploaded every minute 6
7 What do you see in the picture? Source: Martial Hebert, CMU

8 What do you see in the picture? Black background Two objects One teapot One toy There is a light coming from right One object is shiny the other is not Toy: Consists of 5 layers, in different colors There is a text : Fisher Price The layers are in donut shape Layers are plastic Bottom is wood Teapot: Consists of body and handle Body is metal Handle is ceramic Handle: Dark blue on white Body : golden Reflection of toy on the body Source: Martial Hebert, CMU
9 Challenge What do you see in the picture? Source: Octavia Camps, Penn State

10 Challenge What do you see in the picture? A hand holding a man A hand holding a shiny sphere An Escher drawing Source: Octavia Camps, Penn State

11 Perception and grouping Subjective contours

12 Source: Michael Black, Brown University Occlusion

13 Source: Michael Black, Brown University Shading
14 Source: Michael Black, Brown University Shading

15 Source: Michael Black, Brown University Parts and relations

16 How good are our models? Source: Michael Black, Brown University

17 How good are our models? Source: Michael Black, Brown University

18 Is it only about matching? Source: Michael Black, Brown University

19 Is it only about matching? Source: Michael Black, Brown University
20 Context
21 Context a person?

22 Context a person? the blob is identical to the one on the previous slide after a 90deg rotation

23 Source: Michael Black, Brown University Prior Expectations

24 The goal of computer vision To extract meaning from pixels Source: 80 million tiny images by Torralba et al. Humans are remarkably good at this

25 The goal of computer vision To extract meaning from pixels Source: S. Narasimhan What What we see we see What a computer sees



26 Template matching Slide credit: Fei-fei Li Pinar Duygulu, ENLG
27 Scene categorization outdoor/indoor city/forest/factory/etc. Slide credit: Fei-fei Li and Sevetlana Lazebnik Pinar Duygulu, ENLG
28 Image annotation/tagging street people building mountain Slide credit: Fei-fei Li and Sevetlana Lazebnik Pinar Duygulu, ENLG
29 Object Detection find pedestrians Slide credit: Fei-fei Li and Sevetlana Lazebnik Pinar Duygulu, ENLG
30 Activity Recognition walking shopping rolling a cart sitting talking Slide credit: Fei-fei Li and Sevetlana Lazebnik Pinar Duygulu, ENLG
31 Object recognition sky mountain building tree banner people building street lamp market Slide credit: Fei-fei Li and Sevetlana Lazebnik Pinar Duygulu, ENLG
32 Applications
 Digit recognition yann.")



33 Optical character recognition (OCR) Digit recognition yann.lecun.com License plate readers Sudoku grabber Source: S. Seitz, N. Snavely Automatic check processing




34 Biometrics Fingerprint scanners on many new laptops, other devices Face recognition systems now beginning to appear more widely Source: S. Seitz

35 Face detection Many consumer digital cameras now detect faces Source: S. Seitz

36 Smile detection Source: S. Seitz Sony Cyber-shot T70 Digital Still Camera

37 Face recognition: Apple iphoto software Source: S. Lazebnik, UIUC

38 Mobile visual search: Google Goggles Source: S. Lazebnik, UIUC

39 Automotive safety Mobileye: Vision systems in high-end BMW, GM, Volvo models Pedestrian collision warning Forward collision warning Lane departure warning Headway monitoring and warning Source: A. Shashua, S. Seitz

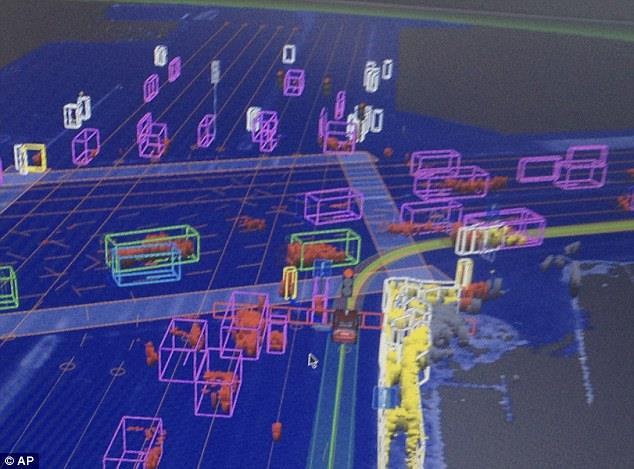
40 Source: S. Lazebnik, UIUC Self-driving cars






41 Vision-based interaction: Xbox Kinect Source: S. Lazebnik, UIUC

42 3D Reconstruction: Kinect Fusion YouTube Video Source: S. Lazebnik, UIUC

43 3D Reconstruction: Multi-View Stereo Source: S. Lazebnik, UIUC YouTube Video

44 Photosynth Based on Photo Tourism technology developed by Noah Snavely, Steve Seitz, and Rick Szeliski Source: Szeliski, Seitz. Chen

45 Google Maps Photo Tours
 Source: Szeliski, Seitz.")
46 Earth viewers (3D modeling) Image from Microsoft s Virtual Earth (see also: Google Earth) Source: Szeliski, Seitz. Chen

47 Object recognition (in supermarkets) LaneHawk by EvolutionRobotics A smart camera is flush-mounted in the checkout lane, continuously watching for items. When an item is detected and recognized, the cashier verifies the quantity of items that were found under the basket, and continues to close the transaction. The item can remain under the basket, and with LaneHawk,you are assured to get paid for it Source: Szeliski, Seitz. Chen

48 Object recognition (in mobile phones) This is becoming real: Microsoft Research Point & Find, Nokia Source: Szeliski, Seitz. Chen




49 Special effects: shape and motion capture Source: Szeliski, Seitz. Chen
 used for several tasks Source: Szeliski, Seitz.")
50 Vision in space NASA'S Mars Exploration Rover Spirit captured this westward view from atop a low plateau where Spirit spent the closing months of Vision systems (JPL) used for several tasks Source: Szeliski, Seitz. Chen Panorama stitching 3D terrain modeling Obstacle detection, position tracking For more, read Computer Vision on Mars by Matthies et al.


51 Robotics NASA s Mars Spirit Rover Source: Szeliski, Seitz. Chen


52 Medical imaging 3D imaging MRI, CT Image guided surgery Grimson et al., MIT Source: Szeliski, Seitz. Chen
53 Why is computer vision difficult?



54 Challenges: viewpoint variation Michelangelo Source: Fei-Fei, Fergus & Torralba

55 Challenges: illumination Source: J. Koenderink


56 Challenges: scale Source: Fei-Fei, Fergus & Torralba

57 Challenges: deformation Xu, Beihong 1943 Source: Fei-Fei, Fergus & Torralba

58 Challenges: occlusion Source: Fei Fei, Fergus, Torralba

59 Challenges: Background Clutter Source: Svetlana Lazebnik, UIUC

60 Challenges: Motion Source: Svetlana Lazebnik, UIUC






61 Challenges: object intra-class variation Source: Fei-Fei, Fergus & Torralba


62 Source: Fei-Fei, Fergus & Torralba Challenges: local ambiguity
63 Challenges: local ambiguity Source: Rob Fergus and Antonio

64 Challenges: local ambiguity Source: Rob Fergus and Antonio






65 Context Slide credit: Fei-fei Li Pinar Duygulu, ENLG


66 Challenges: Inherent ambiguity Many different 3D scenes could have given rise to a particular 2D picture Image source: Svetlana Lazebnik, UIUC

67 Challenges or opportunities? Images are confusing, but they also reveal the structure of the world through numerous cues Our job is to interpret the cues! Image source: J. Koenderink

68 Depth cues: Linear perspective Image source: Svetlana Lazebnik, UIUC

69 Depth cues: Aerial perspective Image source: Svetlana Lazebnik, UIUC

70 Source: J. Koenderink Depth ordering cues: Occlusion

71 Image source: Svetlana Lazebnik, UIUC Shape cues: Texture gradient

72 Shape and lighting cues: Shading Image source: Svetlana Lazebnik, UIUC

73 Position and lighting cues: Cast shadows Source: J. Koenderink
 Source: Svetlana Lazebnik, UIUC")
74 Grouping cues: Similarity (color, texture, proximity) Source: Svetlana Lazebnik, UIUC

75 Grouping cues: Common fate Source: Fei Fei Li, Stanford University

76 Origins of computer vision L. G. Roberts, Machine Perception of Three Dimensional Solids, Ph.D. thesis, MIT Department of Electrical Engineering, Source: Svetlana Lazebnik, UIUC
77 Connections to other disciplines Artificial Intelligence Robotics Machine Learning Computer Vision Computer Graphics Cognitive science Neuroscience Image Processing Source: Svetlana Lazebnik, UIUC
78
Today I t n d ro ucti tion to computer vision Course overview Course requirements
 COMP 776: Computer Vision Today Introduction ti to computer vision i Course overview Course requirements The goal of computer vision To extract t meaning from pixels What we see What a computer sees Source:
COMP 776: Computer Vision Today Introduction ti to computer vision i Course overview Course requirements The goal of computer vision To extract t meaning from pixels What we see What a computer sees Source:
Introduction. Visual data acquisition devices. The goal of computer vision. The goal of computer vision. Vision as measurement device
 Spring 15 CIS 5543 Computer Vision Visual data acquisition devices Introduction Haibin Ling http://www.dabi.temple.edu/~hbling/teaching/15s_5543/index.html Revised from S. Lazebnik The goal of computer
Spring 15 CIS 5543 Computer Vision Visual data acquisition devices Introduction Haibin Ling http://www.dabi.temple.edu/~hbling/teaching/15s_5543/index.html Revised from S. Lazebnik The goal of computer
COMP 776: Computer Vision
 COMP 776: Computer Vision Basic Info Instructor: Svetlana Lazebnik (lazebnik@cs.unc.edu) Office hours: By appointment, FB 244 Textbook (recommended): Forsyth & Ponce, Computer Vision: A Modern Approach
COMP 776: Computer Vision Basic Info Instructor: Svetlana Lazebnik (lazebnik@cs.unc.edu) Office hours: By appointment, FB 244 Textbook (recommended): Forsyth & Ponce, Computer Vision: A Modern Approach
CSE 408 Multimedia Information System
 CSE 408 Multimedia Information System Intro to Images & Vision Yezhou Yang Lots of slides from Tamara Berg and L. Feifei Intro to Computer Vision Source: L. Lazebnik The goal of computer vision To perceive
CSE 408 Multimedia Information System Intro to Images & Vision Yezhou Yang Lots of slides from Tamara Berg and L. Feifei Intro to Computer Vision Source: L. Lazebnik The goal of computer vision To perceive
Lecture 1 Introduction to Computer Vision. Lin ZHANG, PhD School of Software Engineering, Tongji University Spring 2014
 Lecture 1 Introduction to Computer Vision Lin ZHANG, PhD School of Software Engineering, Tongji University Spring 2014 Course Info Contact Information Room 314, Jishi Building Email: cslinzhang@tongji.edu.cn
Lecture 1 Introduction to Computer Vision Lin ZHANG, PhD School of Software Engineering, Tongji University Spring 2014 Course Info Contact Information Room 314, Jishi Building Email: cslinzhang@tongji.edu.cn
CENG 595 Selected Topics in Computer Engineering Computer Vision. Zafer ARICAN, PhD
 CENG 595 Selected Topics in Computer Engineering Computer Vision Zafer ARICAN, PhD Today Administrivia What is Computer Vision? Why is it a difficult problem? State-of-the art Brief course syllabus Instructor
CENG 595 Selected Topics in Computer Engineering Computer Vision Zafer ARICAN, PhD Today Administrivia What is Computer Vision? Why is it a difficult problem? State-of-the art Brief course syllabus Instructor
CSE 455: Computer Vision
 CSE 455: Computer Vision Instructors TAs Neel Joshi neel@cs Ira Kemelmacher kemelmi@cs Ian Simon iansimon@cs Rahul Garg rahul@cs Jiun-Hung Chen jhchen@cs Web Page http://www.cs.washington.edu/455 Time:
CSE 455: Computer Vision Instructors TAs Neel Joshi neel@cs Ira Kemelmacher kemelmi@cs Ian Simon iansimon@cs Rahul Garg rahul@cs Jiun-Hung Chen jhchen@cs Web Page http://www.cs.washington.edu/455 Time:
Introduction to Computer Vision
 Introduction to Computer Vision by James Hays Image by kirkh.deviantart.com Categories of the SUN database What is Computer Vision? Computer Vision and Nearby Fields Computer Graphics: Models to Images
Introduction to Computer Vision by James Hays Image by kirkh.deviantart.com Categories of the SUN database What is Computer Vision? Computer Vision and Nearby Fields Computer Graphics: Models to Images
CSE 473/573 Computer Vision and Image Processing (CVIP) Ifeoma Nwogu
 Ifeoma Nwogu") CSE 473/573 Computer Vision and Image Processing (CVIP) Ifeoma Nwogu inwogu@buffalo.edu Today Logistics Schedule Introductions What is computer vision? Why is vision so hard? Prerequisites This course
CSE 473/573 Computer Vision and Image Processing (CVIP) Ifeoma Nwogu inwogu@buffalo.edu Today Logistics Schedule Introductions What is computer vision? Why is vision so hard? Prerequisites This course
Lecture 1 Introduction to Computer Vision. Lin ZHANG, PhD School of Software Engineering, Tongji University Spring 2015
 Lecture 1 Introduction to Computer Vision Lin ZHANG, PhD School of Software Engineering, Tongji University Spring 2015 Course Info Contact Information Room 314, Jishi Building Email: cslinzhang@tongji.edu.cn
Lecture 1 Introduction to Computer Vision Lin ZHANG, PhD School of Software Engineering, Tongji University Spring 2015 Course Info Contact Information Room 314, Jishi Building Email: cslinzhang@tongji.edu.cn
Spring 2018 CS543 / ECE549 Computer Vision. Course webpage URL:
 Spring 2018 CS543 / ECE549 Computer Vision Course webpage URL: http://slazebni.cs.illinois.edu/spring18/ The goal of computer vision To extract meaning from pixels What we see What a computer sees Source:
Spring 2018 CS543 / ECE549 Computer Vision Course webpage URL: http://slazebni.cs.illinois.edu/spring18/ The goal of computer vision To extract meaning from pixels What we see What a computer sees Source:
Lecture 1 Introduction to Computer Vision. Lin ZHANG, PhD School of Software Engineering, Tongji University Spring 2018
 Lecture 1 Introduction to Computer Vision Lin ZHANG, PhD School of Software Engineering, Tongji University Spring 2018 Course Info Contact Information Room 408L, Jishi Building Email: cslinzhang@tongji.edu.cn
Lecture 1 Introduction to Computer Vision Lin ZHANG, PhD School of Software Engineering, Tongji University Spring 2018 Course Info Contact Information Room 408L, Jishi Building Email: cslinzhang@tongji.edu.cn
 COMP 9517 Computer Vision Introduc
COMP 9517 Computer Vision Introduc CS6550 Computer Vision
 CS6550 Computer Vision Class Meeting: M7M8 (3:30pm 5:20pm), R6 (2:20pm 3:10pm). Rm 106 Delta Bldg., 台達館 106 室 Instructor: Prof. Shang-Hong Lai, Rm. 636 Delta Bldg., 賴尚宏, 台達館 636 室, Tel: ext. 42958, Email:
CS6550 Computer Vision Class Meeting: M7M8 (3:30pm 5:20pm), R6 (2:20pm 3:10pm). Rm 106 Delta Bldg., 台達館 106 室 Instructor: Prof. Shang-Hong Lai, Rm. 636 Delta Bldg., 賴尚宏, 台達館 636 室, Tel: ext. 42958, Email:
Computer Vision Lecture 1
 Computer Vision Lecture 1 Introduction 19.10.2016 Bastian Leibe Visual Computing Institute RWTH Aachen University http://www.vision.rwth-aachen.de/ leibe@vision.rwth-aachen.de Organization Lecturer Prof.
Computer Vision Lecture 1 Introduction 19.10.2016 Bastian Leibe Visual Computing Institute RWTH Aachen University http://www.vision.rwth-aachen.de/ leibe@vision.rwth-aachen.de Organization Lecturer Prof.
Image Analysis & Searching
 Image Analysis & Searching 1 Searching Photos Look for photos like this one: Look for beach photos Look for photos taken Sept. 15, 2000 Look for photos with: Look for photos with Aunt Thelma 2 Annotating
Image Analysis & Searching 1 Searching Photos Look for photos like this one: Look for beach photos Look for photos taken Sept. 15, 2000 Look for photos with: Look for photos with Aunt Thelma 2 Annotating
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt.
 CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Session 1 - Introduction Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering Lab e-mail:
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Session 1 - Introduction Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering Lab e-mail:
Computer Vision for HCI. Introduction. Machines That See? Science fiction. HAL, Terminator, Star Wars, I-Robot, etc.
 Computer Vision for HCI Introduction Machines That See? Science fiction HAL, Terminator, Star Wars, I-Robot, etc. 1 Machines That See? [ movie ] Definition of Computer Vision Goal of computer vision is
Computer Vision for HCI Introduction Machines That See? Science fiction HAL, Terminator, Star Wars, I-Robot, etc. 1 Machines That See? [ movie ] Definition of Computer Vision Goal of computer vision is
Recognition problems. Object Recognition. Readings. What is recognition?
 Recognition problems Object Recognition Computer Vision CSE576, Spring 2008 Richard Szeliski What is it? Object and scene recognition Who is it? Identity recognition Where is it? Object detection What
Recognition problems Object Recognition Computer Vision CSE576, Spring 2008 Richard Szeliski What is it? Object and scene recognition Who is it? Identity recognition Where is it? Object detection What
CS 131 Lecture 1: Course introduction
 CS 131 Lecture 1: Course introduction Olivier Moindrot Department of Computer Science Stanford University Stanford, CA 94305 olivierm@stanford.edu 1 What is computer vision? 1.1 Definition Two definitions
CS 131 Lecture 1: Course introduction Olivier Moindrot Department of Computer Science Stanford University Stanford, CA 94305 olivierm@stanford.edu 1 What is computer vision? 1.1 Definition Two definitions
CS6670: Computer Vision
 CS6670: Computer Vision Noah Snavely Lecture 22: Computational photography photomatix.com Announcements Final project midterm reports due on Tuesday to CMS by 11:59pm BRDF s can be incredibly complicated
CS6670: Computer Vision Noah Snavely Lecture 22: Computational photography photomatix.com Announcements Final project midterm reports due on Tuesday to CMS by 11:59pm BRDF s can be incredibly complicated
(15-862): Computational Photography
: Computational Photography") 15-463 (15-862): Computational Photography 15-463 (15-862): Computational Photography Staff Prof: Alexei Efros (efros@cs), 225 Smith Hall TA: Natasha Kholgade (nkholgad@andrew.cmu.edu) Web Page http://graphics.cs.cmu.edu/courses/15-463/
15-463 (15-862): Computational Photography 15-463 (15-862): Computational Photography Staff Prof: Alexei Efros (efros@cs), 225 Smith Hall TA: Natasha Kholgade (nkholgad@andrew.cmu.edu) Web Page http://graphics.cs.cmu.edu/courses/15-463/
CSE 473/573 Computer Vision and Image Processing (CVIP)
") CSE 473/573 Computer Vision and Image Processing (CVIP) Ifeoma Nwogu inwogu@buffalo.edu Lecture 4 Image formation(part I) Schedule Last class linear algebra overview Today Image formation and camera properties
CSE 473/573 Computer Vision and Image Processing (CVIP) Ifeoma Nwogu inwogu@buffalo.edu Lecture 4 Image formation(part I) Schedule Last class linear algebra overview Today Image formation and camera properties
(15-862): Computational Photography
: Computational Photography") 15-463 (15-862): Computational Photography 15-463 (15-862): Computational Photography Staff Prof: Alexei Efros (efros@cs), 4207 NSH TAs: Alvaro Collet (acollet@cs) and Laura Trutoiu (trutoiu@cs) Web Page
15-463 (15-862): Computational Photography 15-463 (15-862): Computational Photography Staff Prof: Alexei Efros (efros@cs), 4207 NSH TAs: Alvaro Collet (acollet@cs) and Laura Trutoiu (trutoiu@cs) Web Page
ARTIFICIAL INTELLIGENCE - ROBOTICS
 ARTIFICIAL INTELLIGENCE - ROBOTICS http://www.tutorialspoint.com/artificial_intelligence/artificial_intelligence_robotics.htm Copyright tutorialspoint.com Robotics is a domain in artificial intelligence
ARTIFICIAL INTELLIGENCE - ROBOTICS http://www.tutorialspoint.com/artificial_intelligence/artificial_intelligence_robotics.htm Copyright tutorialspoint.com Robotics is a domain in artificial intelligence
Lecture 19: Depth Cameras. Kayvon Fatahalian CMU : Graphics and Imaging Architectures (Fall 2011)
") Lecture 19: Depth Cameras Kayvon Fatahalian CMU 15-869: Graphics and Imaging Architectures (Fall 2011) Continuing theme: computational photography Cheap cameras capture light, extensive processing produces
Lecture 19: Depth Cameras Kayvon Fatahalian CMU 15-869: Graphics and Imaging Architectures (Fall 2011) Continuing theme: computational photography Cheap cameras capture light, extensive processing produces
(15-862): Computational Photography
: Computational Photography") 15-463 (15-862): Computational Photography 15-463 (15-862): Computational Photography Staff Prof: Alexei Efros (efros@cs), 4207 NSH TA: Santosh Kumar Divvala (santosh@cs), TBA Web Page http://graphics.cs.cmu.edu/courses/15-463/
15-463 (15-862): Computational Photography 15-463 (15-862): Computational Photography Staff Prof: Alexei Efros (efros@cs), 4207 NSH TA: Santosh Kumar Divvala (santosh@cs), TBA Web Page http://graphics.cs.cmu.edu/courses/15-463/
CSE Tue 10/09. Nadir Weibel
 CSE 118 - Tue 10/09 Nadir Weibel Today Admin Teams Assignments, grading, submissions Mini Quiz on Week 1 (readings and class material) Low-Fidelity Prototyping 1st Project Assignment Computer Vision, Kinect,
CSE 118 - Tue 10/09 Nadir Weibel Today Admin Teams Assignments, grading, submissions Mini Quiz on Week 1 (readings and class material) Low-Fidelity Prototyping 1st Project Assignment Computer Vision, Kinect,
(15-862): Computational Photography
: Computational Photography") 15-463 (15-862): Computational Photography Staff Prof: Alexei Efros (efros@cs), 4207 NSH TA: Mohit Gupta (mohitg@cs) Web Page http://graphics.cs.cmu.edu/courses/15-463/ Newsgroup: cmu.cs.class.cs463 Today
15-463 (15-862): Computational Photography Staff Prof: Alexei Efros (efros@cs), 4207 NSH TA: Mohit Gupta (mohitg@cs) Web Page http://graphics.cs.cmu.edu/courses/15-463/ Newsgroup: cmu.cs.class.cs463 Today
High Level Computer Vision. Introduction - April 16, Bernt Schiele & Mario Fritz MPI Informatics and Saarland University, Saarbrücken, Germany
 Perceptual and Sensory Augmented Computing High Level Computer Vision Introduction - April 16, 2014 MPI Informatics and Saarland University, Saarbrücken, Germany http://www.d2.mpi-inf.mpg.de/cv Computer
Perceptual and Sensory Augmented Computing High Level Computer Vision Introduction - April 16, 2014 MPI Informatics and Saarland University, Saarbrücken, Germany http://www.d2.mpi-inf.mpg.de/cv Computer
DIGITAL IMAGE PROCESSING
 DIGITAL IMAGE PROCESSING Lecture 1 Introduction Tammy Riklin Raviv Electrical and Computer Engineering Ben-Gurion University of the Negev 2 Introduction to Digital Image Processing Lecturer: Dr. Tammy
DIGITAL IMAGE PROCESSING Lecture 1 Introduction Tammy Riklin Raviv Electrical and Computer Engineering Ben-Gurion University of the Negev 2 Introduction to Digital Image Processing Lecturer: Dr. Tammy
Computer vision, wearable computing and the future of transportation
 Computer vision, wearable computing and the future of transportation Amnon Shashua Hebrew University, Mobileye, OrCam 1 Computer Vision that will Change Transportation Amnon Shashua Mobileye 2 Computer
Computer vision, wearable computing and the future of transportation Amnon Shashua Hebrew University, Mobileye, OrCam 1 Computer Vision that will Change Transportation Amnon Shashua Mobileye 2 Computer
Regan Mandryk. Depth and Space Perception
 Depth and Space Perception Regan Mandryk Disclaimer Many of these slides include animated gifs or movies that may not be viewed on your computer system. They should run on the latest downloads of Quick
Depth and Space Perception Regan Mandryk Disclaimer Many of these slides include animated gifs or movies that may not be viewed on your computer system. They should run on the latest downloads of Quick
CS 534: Computer Vision
 CS 534: Computer Vision Spring 2005 Ahmed Elgammal Dept of Computer Science Computer Vision Introduction - 1 Outlines Vision What and Why? Human vision Computer vision General computer vision applications
CS 534: Computer Vision Spring 2005 Ahmed Elgammal Dept of Computer Science Computer Vision Introduction - 1 Outlines Vision What and Why? Human vision Computer vision General computer vision applications
Computational and Biological Vision
 Introduction to Computational and Biological Vision CS 202-1-5261 Computer Science Department, BGU Ohad Ben-Shahar Some necessary administrivia Lecturer : Ohad Ben-Shahar Email address : ben-shahar@cs.bgu.ac.il
Introduction to Computational and Biological Vision CS 202-1-5261 Computer Science Department, BGU Ohad Ben-Shahar Some necessary administrivia Lecturer : Ohad Ben-Shahar Email address : ben-shahar@cs.bgu.ac.il
Next Classes. Spatial frequency Fourier transform and frequency domain. Reminder: Textbook. Frequency view of filtering Hybrid images Sampling
 Salvador Dali, 1976 Next Classes Spatial frequency Fourier transform and frequency domain Frequency view of filtering Hybrid images Sampling Reminder: Textbook Today s lecture covers material in 3.4 Slide:
Salvador Dali, 1976 Next Classes Spatial frequency Fourier transform and frequency domain Frequency view of filtering Hybrid images Sampling Reminder: Textbook Today s lecture covers material in 3.4 Slide:
The Human Visual System!
 an engineering-focused introduction to! The Human Visual System! EE367/CS448I: Computational Imaging and Display! stanford.edu/class/ee367! Lecture 2! Gordon Wetzstein! Stanford University! nautilus eye,
an engineering-focused introduction to! The Human Visual System! EE367/CS448I: Computational Imaging and Display! stanford.edu/class/ee367! Lecture 2! Gordon Wetzstein! Stanford University! nautilus eye,
Prof Trivedi ECE253A Notes for Students only
 ECE 253A: Digital Processing: Course Related Class Website: https://sites.google.com/a/eng.ucsd.edu/ece253fall2017/ Course Graduate Assistants: Nachiket Deo Borhan Vasili Kirill Pirozenko Piazza Grading:
ECE 253A: Digital Processing: Course Related Class Website: https://sites.google.com/a/eng.ucsd.edu/ece253fall2017/ Course Graduate Assistants: Nachiket Deo Borhan Vasili Kirill Pirozenko Piazza Grading:
Computer Vision. Thursday, August 30
 Computer Vision Thursday, August 30 1 Today Course overview Requirements, logistics Image formation 2 Introductions Instructor: Prof. Kristen Grauman grauman @ cs TAY 4.118, Thurs 2-4 pm TA: Sudheendra
Computer Vision Thursday, August 30 1 Today Course overview Requirements, logistics Image formation 2 Introductions Instructor: Prof. Kristen Grauman grauman @ cs TAY 4.118, Thurs 2-4 pm TA: Sudheendra
Computer Vision Lesson Plan
 Computer Vision Lesson Plan Overview Computer Vision Summary Computers today are being used to accomplish tasks that require using one or more of the five senses. Vision - seeing objects and identifying
Computer Vision Lesson Plan Overview Computer Vision Summary Computers today are being used to accomplish tasks that require using one or more of the five senses. Vision - seeing objects and identifying
Today. CS 395T Visual Recognition. Course content. Administration. Expectations. Paper reviews
 Today CS 395T Visual Recognition Course logistics Overview Volunteers, prep for next week Thursday, January 18 Administration Class: Tues / Thurs 12:30-2 PM Instructor: Kristen Grauman grauman at cs.utexas.edu
Today CS 395T Visual Recognition Course logistics Overview Volunteers, prep for next week Thursday, January 18 Administration Class: Tues / Thurs 12:30-2 PM Instructor: Kristen Grauman grauman at cs.utexas.edu
Advanced Robotics Introduction
 Advanced Robotics Introduction Institute for Software Technology 1 Motivation Agenda Some Definitions and Thought about Autonomous Robots History Challenges Application Examples 2 http://youtu.be/rvnvnhim9kg
Advanced Robotics Introduction Institute for Software Technology 1 Motivation Agenda Some Definitions and Thought about Autonomous Robots History Challenges Application Examples 2 http://youtu.be/rvnvnhim9kg
Image Processing Based Vehicle Detection And Tracking System
 Image Processing Based Vehicle Detection And Tracking System Poonam A. Kandalkar 1, Gajanan P. Dhok 2 ME, Scholar, Electronics and Telecommunication Engineering, Sipna College of Engineering and Technology,
Image Processing Based Vehicle Detection And Tracking System Poonam A. Kandalkar 1, Gajanan P. Dhok 2 ME, Scholar, Electronics and Telecommunication Engineering, Sipna College of Engineering and Technology,
The Distributed Camera
 The Distributed Camera Noah Snavely Cornell University Microsoft Faculty Summit June 16, 2013 The Age of Exapixel Image Data Over a trillion photos available online Millions uploaded every hour Interconnected
The Distributed Camera Noah Snavely Cornell University Microsoft Faculty Summit June 16, 2013 The Age of Exapixel Image Data Over a trillion photos available online Millions uploaded every hour Interconnected
Image formation - Cameras. Grading & Project. About the course. Tentative Schedule. Course Content. Students introduction
 About the course Instructors: Haibin Ling (hbling@temple, Wachman 35) Hours Lecture: Tuesda 5:3-8:pm, TTLMAN 43B Office hour: Tuesda 3: - 5:pm, or b appointment Textbook Computer Vision: Models, Learning,
About the course Instructors: Haibin Ling (hbling@temple, Wachman 35) Hours Lecture: Tuesda 5:3-8:pm, TTLMAN 43B Office hour: Tuesda 3: - 5:pm, or b appointment Textbook Computer Vision: Models, Learning,
Transportation Informatics Group, ALPEN-ADRIA University of Klagenfurt. Transportation Informatics Group University of Klagenfurt 3/10/2009 1
 Machine Vision Transportation Informatics Group University of Klagenfurt Alireza Fasih, 2009 3/10/2009 1 Address: L4.2.02, Lakeside Park, Haus B04, Ebene 2, Klagenfurt-Austria Index Driver Fatigue Detection
Machine Vision Transportation Informatics Group University of Klagenfurt Alireza Fasih, 2009 3/10/2009 1 Address: L4.2.02, Lakeside Park, Haus B04, Ebene 2, Klagenfurt-Austria Index Driver Fatigue Detection
Practical Image and Video Processing Using MATLAB
 Practical Image and Video Processing Using MATLAB Chapter 1 Introduction and overview What will we learn? What is image processing? What are the main applications of image processing? What is an image?
Practical Image and Video Processing Using MATLAB Chapter 1 Introduction and overview What will we learn? What is image processing? What are the main applications of image processing? What is an image?
Manipulation. Manipulation. Better Vision through Manipulation. Giorgio Metta Paul Fitzpatrick. Humanoid Robotics Group.
 Manipulation Manipulation Better Vision through Manipulation Giorgio Metta Paul Fitzpatrick Humanoid Robotics Group MIT AI Lab Vision & Manipulation In robotics, vision is often used to guide manipulation
Manipulation Manipulation Better Vision through Manipulation Giorgio Metta Paul Fitzpatrick Humanoid Robotics Group MIT AI Lab Vision & Manipulation In robotics, vision is often used to guide manipulation
FLASH LiDAR KEY BENEFITS
 In 2013, 1.2 million people died in vehicle accidents. That is one death every 25 seconds. Some of these lives could have been saved with vehicles that have a better understanding of the world around them
In 2013, 1.2 million people died in vehicle accidents. That is one death every 25 seconds. Some of these lives could have been saved with vehicles that have a better understanding of the world around them
Keywords: Data Compression, Image Processing, Image Enhancement, Image Restoration, Image Rcognition.
 Volume 5, Issue 1, January 2015 ISSN: 2277 128X International Journal of Advanced Research in Computer Science and Software Engineering Research Paper Available online at: www.ijarcsse.com Scrutiny on
Volume 5, Issue 1, January 2015 ISSN: 2277 128X International Journal of Advanced Research in Computer Science and Software Engineering Research Paper Available online at: www.ijarcsse.com Scrutiny on
COMPUTER VISION. Pascal Fua EPFL CVLab CH-1015 Lausanne Switzerland
 COMPUTER VISION Pascal Fua EPFL CVLab CH-1015 Lausanne Switzerland http://cvlab.epfl.ch/~fua COMPUTER VISION Goal: Inferring the properties of the world from one or more images Photographs Video Sequences
COMPUTER VISION Pascal Fua EPFL CVLab CH-1015 Lausanne Switzerland http://cvlab.epfl.ch/~fua COMPUTER VISION Goal: Inferring the properties of the world from one or more images Photographs Video Sequences
Supplementary Material of
 Supplementary Material of Efficient and Robust Color Consistency for Community Photo Collections Jaesik Park Intel Labs Yu-Wing Tai SenseTime Sudipta N. Sinha Microsoft Research In So Kweon KAIST In the
Supplementary Material of Efficient and Robust Color Consistency for Community Photo Collections Jaesik Park Intel Labs Yu-Wing Tai SenseTime Sudipta N. Sinha Microsoft Research In So Kweon KAIST In the
Limitations of the Medium, compensation or accentuation
 The Art and Science of Depiction Limitations of the Medium, compensation or accentuation Fredo Durand MIT- Lab for Computer Science Limitations of the medium The medium cannot usually produce the same
The Art and Science of Depiction Limitations of the Medium, compensation or accentuation Fredo Durand MIT- Lab for Computer Science Limitations of the medium The medium cannot usually produce the same
Limitations of the medium
 The Art and Science of Depiction Limitations of the Medium, compensation or accentuation Limitations of the medium The medium cannot usually produce the same stimulus Real scene (possibly imaginary) Stimulus
The Art and Science of Depiction Limitations of the Medium, compensation or accentuation Limitations of the medium The medium cannot usually produce the same stimulus Real scene (possibly imaginary) Stimulus
Panoramas. CS 178, Spring Marc Levoy Computer Science Department Stanford University
 Panoramas CS 178, Spring 2012 Marc Levoy Computer Science Department Stanford University What is a panorama?! a wider-angle image than a normal camera can capture! any image stitched from overlapping photographs!
Panoramas CS 178, Spring 2012 Marc Levoy Computer Science Department Stanford University What is a panorama?! a wider-angle image than a normal camera can capture! any image stitched from overlapping photographs!
Perception. Introduction to HRI Simmons & Nourbakhsh Spring 2015
 Perception Introduction to HRI Simmons & Nourbakhsh Spring 2015 Perception my goals What is the state of the art boundary? Where might we be in 5-10 years? The Perceptual Pipeline The classical approach:
Perception Introduction to HRI Simmons & Nourbakhsh Spring 2015 Perception my goals What is the state of the art boundary? Where might we be in 5-10 years? The Perceptual Pipeline The classical approach:
Panoramas. CS 178, Spring Marc Levoy Computer Science Department Stanford University
 Panoramas CS 178, Spring 2013 Marc Levoy Computer Science Department Stanford University What is a panorama? a wider-angle image than a normal camera can capture any image stitched from overlapping photographs
Panoramas CS 178, Spring 2013 Marc Levoy Computer Science Department Stanford University What is a panorama? a wider-angle image than a normal camera can capture any image stitched from overlapping photographs
CPSC 425: Computer Vision
 1 / 55 CPSC 425: Computer Vision Instructor: Fred Tung ftung@cs.ubc.ca Department of Computer Science University of British Columbia Lecture Notes 2015/2016 Term 2 2 / 55 Menu January 7, 2016 Topics: Image
1 / 55 CPSC 425: Computer Vision Instructor: Fred Tung ftung@cs.ubc.ca Department of Computer Science University of British Columbia Lecture Notes 2015/2016 Term 2 2 / 55 Menu January 7, 2016 Topics: Image
P1.4. Light has to go where it is needed: Future Light Based Driver Assistance Systems
 Light has to go where it is needed: Future Light Based Driver Assistance Systems Thomas Könning¹, Christian Amsel¹, Ingo Hoffmann² ¹ Hella KGaA Hueck & Co., Lippstadt, Germany ² Hella-Aglaia Mobile Vision
Light has to go where it is needed: Future Light Based Driver Assistance Systems Thomas Könning¹, Christian Amsel¹, Ingo Hoffmann² ¹ Hella KGaA Hueck & Co., Lippstadt, Germany ² Hella-Aglaia Mobile Vision
Virtual Reality. NBAY 6120 April 4, 2016 Donald P. Greenberg Lecture 9
 Virtual Reality NBAY 6120 April 4, 2016 Donald P. Greenberg Lecture 9 Virtual Reality A term used to describe a digitally-generated environment which can simulate the perception of PRESENCE. Note that
Virtual Reality NBAY 6120 April 4, 2016 Donald P. Greenberg Lecture 9 Virtual Reality A term used to describe a digitally-generated environment which can simulate the perception of PRESENCE. Note that
Computational Photography
 Computational photography Computational Photography Digital Visual Effects Yung-Yu Chuang wikipedia: Computational photography h refers broadly to computational imaging techniques that enhance or extend
Computational photography Computational Photography Digital Visual Effects Yung-Yu Chuang wikipedia: Computational photography h refers broadly to computational imaging techniques that enhance or extend
Digital Photography and Geometry Capture. NBAY 6120 March 8, 2018 Donald P. Greenberg Lecture 3
 Digital Photography and Geometry Capture NBAY 6120 March 8, 2018 Donald P. Greenberg Lecture 3 Required Reading N. Snavely, S.M. Seitz, and R. Szeliski, Photo Tourism: Exploring Photo Collections in 3D,
Digital Photography and Geometry Capture NBAY 6120 March 8, 2018 Donald P. Greenberg Lecture 3 Required Reading N. Snavely, S.M. Seitz, and R. Szeliski, Photo Tourism: Exploring Photo Collections in 3D,
Brief summary report of novel digital capture techniques
 Brief summary report of novel digital capture techniques Paul Bourke, ivec@uwa, February 2014 The following briefly summarizes and gives examples of the various forms of novel digital photography and video
Brief summary report of novel digital capture techniques Paul Bourke, ivec@uwa, February 2014 The following briefly summarizes and gives examples of the various forms of novel digital photography and video
Introduction. Ioannis Rekleitis
 Introduction Ioannis Rekleitis Why Image Processing? Who here has a camera? How many cameras do you have Point where computers fast/cheap Cameras become omnipresent Deep Learning CSCE 590: Introduction
Introduction Ioannis Rekleitis Why Image Processing? Who here has a camera? How many cameras do you have Point where computers fast/cheap Cameras become omnipresent Deep Learning CSCE 590: Introduction
Chapter 12 Image Processing
 Chapter 12 Image Processing The distance sensor on your self-driving car detects an object 100 m in front of your car. Are you following the car in front of you at a safe distance or has a pedestrian jumped
Chapter 12 Image Processing The distance sensor on your self-driving car detects an object 100 m in front of your car. Are you following the car in front of you at a safe distance or has a pedestrian jumped
Image stitching. Image stitching. Video summarization. Applications of image stitching. Stitching = alignment + blending. geometrical registration
 Image stitching Stitching = alignment + blending Image stitching geometrical registration photometric registration Digital Visual Effects, Spring 2006 Yung-Yu Chuang 2005/3/22 with slides by Richard Szeliski,
Image stitching Stitching = alignment + blending Image stitching geometrical registration photometric registration Digital Visual Effects, Spring 2006 Yung-Yu Chuang 2005/3/22 with slides by Richard Szeliski,
Computer Vision in Human-Computer Interaction
 Invited talk in 2010 Autumn Seminar and Meeting of Pattern Recognition Society of Finland, M/S Baltic Princess, 26.11.2010 Computer Vision in Human-Computer Interaction Matti Pietikäinen Machine Vision
Invited talk in 2010 Autumn Seminar and Meeting of Pattern Recognition Society of Finland, M/S Baltic Princess, 26.11.2010 Computer Vision in Human-Computer Interaction Matti Pietikäinen Machine Vision
PERCEIVING MOVEMENT. Ways to create movement
 PERCEIVING MOVEMENT Ways to create movement Perception More than one ways to create the sense of movement Real movement is only one of them Slide 2 Important for survival Animals become still when they
PERCEIVING MOVEMENT Ways to create movement Perception More than one ways to create the sense of movement Real movement is only one of them Slide 2 Important for survival Animals become still when they
Virtual Reality I. Visual Imaging in the Electronic Age. Donald P. Greenberg November 9, 2017 Lecture #21
 Virtual Reality I Visual Imaging in the Electronic Age Donald P. Greenberg November 9, 2017 Lecture #21 1968: Ivan Sutherland 1990s: HMDs, Henry Fuchs 2013: Google Glass History of Virtual Reality 2016:
Virtual Reality I Visual Imaging in the Electronic Age Donald P. Greenberg November 9, 2017 Lecture #21 1968: Ivan Sutherland 1990s: HMDs, Henry Fuchs 2013: Google Glass History of Virtual Reality 2016:
CSCI 1290: Comp Photo
 CSCI 29: Comp Photo Fall 28 @ Brown University James Tompkin Many slides thanks to James Hays old CS 29 course, along with all of its acknowledgements. Things I forgot on Thursday Grads are not required
CSCI 29: Comp Photo Fall 28 @ Brown University James Tompkin Many slides thanks to James Hays old CS 29 course, along with all of its acknowledgements. Things I forgot on Thursday Grads are not required
Digital Photography and Geometry Capture. NBAY 6120 March 9, 2016 Donald P. Greenberg Lecture 4
 Digital Photography and Geometry Capture NBAY 6120 March 9, 2016 Donald P. Greenberg Lecture 4 Required Reading Bilger, Burkhard. "Has the Self-Driving Car Arrived at Last?" The New Yorker. N.p., 25 Nov.
Digital Photography and Geometry Capture NBAY 6120 March 9, 2016 Donald P. Greenberg Lecture 4 Required Reading Bilger, Burkhard. "Has the Self-Driving Car Arrived at Last?" The New Yorker. N.p., 25 Nov.
Machine Vision for the Life Sciences
 Machine Vision for the Life Sciences Presented by: Niels Wartenberg June 12, 2012 Track, Trace & Control Solutions Niels Wartenberg Microscan Sr. Applications Engineer, Clinical Senior Applications Engineer
Machine Vision for the Life Sciences Presented by: Niels Wartenberg June 12, 2012 Track, Trace & Control Solutions Niels Wartenberg Microscan Sr. Applications Engineer, Clinical Senior Applications Engineer
Telling What-Is-What in Video. Gerard Medioni
 Telling What-Is-What in Video Gerard Medioni medioni@usc.edu 1 Tracking Essential problem Establishes correspondences between elements in successive frames Basic problem easy 2 Many issues One target (pursuit)
Telling What-Is-What in Video Gerard Medioni medioni@usc.edu 1 Tracking Essential problem Establishes correspondences between elements in successive frames Basic problem easy 2 Many issues One target (pursuit)
Title Goes Here Algorithms for Biometric Authentication
 Title Goes Here Algorithms for Biometric Authentication February 2003 Vijayakumar Bhagavatula 1 Outline Motivation Challenges Technology: Correlation filters Example results Summary 2 Motivation Recognizing
Title Goes Here Algorithms for Biometric Authentication February 2003 Vijayakumar Bhagavatula 1 Outline Motivation Challenges Technology: Correlation filters Example results Summary 2 Motivation Recognizing
You ve heard about the different types of lines that can appear in line drawings. Now we re ready to talk about how people perceive line drawings.
 You ve heard about the different types of lines that can appear in line drawings. Now we re ready to talk about how people perceive line drawings. 1 Line drawings bring together an abundance of lines to
You ve heard about the different types of lines that can appear in line drawings. Now we re ready to talk about how people perceive line drawings. 1 Line drawings bring together an abundance of lines to
Occlusion. Atmospheric Perspective. Height in the Field of View. Seeing Depth The Cue Approach. Monocular/Pictorial
 Seeing Depth The Cue Approach Occlusion Monocular/Pictorial Cues that are available in the 2D image Height in the Field of View Atmospheric Perspective 1 Linear Perspective Linear Perspective & Texture
Seeing Depth The Cue Approach Occlusion Monocular/Pictorial Cues that are available in the 2D image Height in the Field of View Atmospheric Perspective 1 Linear Perspective Linear Perspective & Texture
CS6670: Computer Vision Noah Snavely. Administrivia. Administrivia. Reading. Last time: Convolution. Last time: Cross correlation 9/8/2009
 CS667: Computer Vision Noah Snavely Administrivia New room starting Thursday: HLS B Lecture 2: Edge detection and resampling From Sandlot Science Administrivia Assignment (feature detection and matching)
CS667: Computer Vision Noah Snavely Administrivia New room starting Thursday: HLS B Lecture 2: Edge detection and resampling From Sandlot Science Administrivia Assignment (feature detection and matching)
Choosing the Optimum Mix of Sensors for Driver Assistance and Autonomous Vehicles
 Choosing the Optimum Mix of Sensors for Driver Assistance and Autonomous Vehicles Ali Osman Ors May 2, 2017 Copyright 2017 NXP Semiconductors 1 Sensing Technology Comparison Rating: H = High, M=Medium,
Choosing the Optimum Mix of Sensors for Driver Assistance and Autonomous Vehicles Ali Osman Ors May 2, 2017 Copyright 2017 NXP Semiconductors 1 Sensing Technology Comparison Rating: H = High, M=Medium,
CMOS Image Sensors in Cell Phones, Cars and Beyond. Patrick Feng General manager BYD Microelectronics October 8, 2013
 CMOS Image Sensors in Cell Phones, Cars and Beyond Patrick Feng General manager BYD Microelectronics October 8, 2013 BYD Microelectronics (BME) is a subsidiary of BYD Company Limited, Shenzhen, China.
CMOS Image Sensors in Cell Phones, Cars and Beyond Patrick Feng General manager BYD Microelectronics October 8, 2013 BYD Microelectronics (BME) is a subsidiary of BYD Company Limited, Shenzhen, China.
Virtual Reality Technology and Convergence. NBA 6120 February 14, 2018 Donald P. Greenberg Lecture 7
 Virtual Reality Technology and Convergence NBA 6120 February 14, 2018 Donald P. Greenberg Lecture 7 Virtual Reality A term used to describe a digitally-generated environment which can simulate the perception
Virtual Reality Technology and Convergence NBA 6120 February 14, 2018 Donald P. Greenberg Lecture 7 Virtual Reality A term used to describe a digitally-generated environment which can simulate the perception
Image Filtering in Spatial domain. Computer Vision Jia-Bin Huang, Virginia Tech
 Image Filtering in Spatial domain Computer Vision Jia-Bin Huang, Virginia Tech Administrative stuffs Lecture schedule changes Office hours - Jia-Bin (44 Whittemore Hall) Friday at : AM 2: PM Office hours
Image Filtering in Spatial domain Computer Vision Jia-Bin Huang, Virginia Tech Administrative stuffs Lecture schedule changes Office hours - Jia-Bin (44 Whittemore Hall) Friday at : AM 2: PM Office hours
APPLICATION OF COMPUTER VISION FOR DETERMINATION OF SYMMETRICAL OBJECT POSITION IN THREE DIMENSIONAL SPACE
 APPLICATION OF COMPUTER VISION FOR DETERMINATION OF SYMMETRICAL OBJECT POSITION IN THREE DIMENSIONAL SPACE Najirah Umar 1 1 Jurusan Teknik Informatika, STMIK Handayani Makassar Email : najirah_stmikh@yahoo.com
APPLICATION OF COMPUTER VISION FOR DETERMINATION OF SYMMETRICAL OBJECT POSITION IN THREE DIMENSIONAL SPACE Najirah Umar 1 1 Jurusan Teknik Informatika, STMIK Handayani Makassar Email : najirah_stmikh@yahoo.com
Human Vision and Human-Computer Interaction. Much content from Jeff Johnson, UI Wizards, Inc.
 Human Vision and Human-Computer Interaction Much content from Jeff Johnson, UI Wizards, Inc. are these guidelines grounded in perceptual psychology and how can we apply them intelligently? Mach bands:
Human Vision and Human-Computer Interaction Much content from Jeff Johnson, UI Wizards, Inc. are these guidelines grounded in perceptual psychology and how can we apply them intelligently? Mach bands:
CSC 170 Introduction to Computers and Their Applications. Lecture #3 Digital Graphics and Video Basics. Bitmap Basics
 CSC 170 Introduction to Computers and Their Applications Lecture #3 Digital Graphics and Video Basics Bitmap Basics As digital devices gained the ability to display images, two types of computer graphics
CSC 170 Introduction to Computers and Their Applications Lecture #3 Digital Graphics and Video Basics Bitmap Basics As digital devices gained the ability to display images, two types of computer graphics
The Impact of Artificial Intelligence. By: Steven Williamson
 The Impact of Artificial Intelligence By: Steven Williamson WHAT IS ARTIFICIAL INTELLIGENCE? It is an area of computer science that deals with advanced and complex technologies that have the ability perform
The Impact of Artificial Intelligence By: Steven Williamson WHAT IS ARTIFICIAL INTELLIGENCE? It is an area of computer science that deals with advanced and complex technologies that have the ability perform
Ant? Bird? Dog? Human -SURE
 ECE 172A: Intelligent Systems: Introduction Week 1 (October 1, 2007): Course Introduction and Announcements Intelligent Robots as Intelligent Systems A systems perspective of Intelligent Robots and capabilities
ECE 172A: Intelligent Systems: Introduction Week 1 (October 1, 2007): Course Introduction and Announcements Intelligent Robots as Intelligent Systems A systems perspective of Intelligent Robots and capabilities
23270: AUGMENTED REALITY FOR NAVIGATION AND INFORMATIONAL ADAS. Sergii Bykov Technical Lead Machine Learning 12 Oct 2017
 23270: AUGMENTED REALITY FOR NAVIGATION AND INFORMATIONAL ADAS Sergii Bykov Technical Lead Machine Learning 12 Oct 2017 Product Vision Company Introduction Apostera GmbH with headquarter in Munich, was
23270: AUGMENTED REALITY FOR NAVIGATION AND INFORMATIONAL ADAS Sergii Bykov Technical Lead Machine Learning 12 Oct 2017 Product Vision Company Introduction Apostera GmbH with headquarter in Munich, was
The ultimate camera. Computational Photography. Creating the ultimate camera. The ultimate camera. What does it do?
 Computational Photography The ultimate camera What does it do? Image from Durand & Freeman s MIT Course on Computational Photography Today s reading Szeliski Chapter 9 The ultimate camera Infinite resolution
Computational Photography The ultimate camera What does it do? Image from Durand & Freeman s MIT Course on Computational Photography Today s reading Szeliski Chapter 9 The ultimate camera Infinite resolution
Color , , Computational Photography Fall 2018, Lecture 7
 Color http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 7 Course announcements Homework 2 is out. - Due September 28 th. - Requires camera and
Color http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 7 Course announcements Homework 2 is out. - Due September 28 th. - Requires camera and
FOCAL LENGTH CHANGE COMPENSATION FOR MONOCULAR SLAM
 FOCAL LENGTH CHANGE COMPENSATION FOR MONOCULAR SLAM Takafumi Taketomi Nara Institute of Science and Technology, Japan Janne Heikkilä University of Oulu, Finland ABSTRACT In this paper, we propose a method
FOCAL LENGTH CHANGE COMPENSATION FOR MONOCULAR SLAM Takafumi Taketomi Nara Institute of Science and Technology, Japan Janne Heikkilä University of Oulu, Finland ABSTRACT In this paper, we propose a method
Visione per il veicolo Paolo Medici 2017/ Visual Perception
 Visione per il veicolo Paolo Medici 2017/2018 02 Visual Perception Today Sensor Suite for Autonomous Vehicle ADAS Hardware for ADAS Sensor Suite Which sensor do you know? Which sensor suite for Which algorithms
Visione per il veicolo Paolo Medici 2017/2018 02 Visual Perception Today Sensor Suite for Autonomous Vehicle ADAS Hardware for ADAS Sensor Suite Which sensor do you know? Which sensor suite for Which algorithms
Häkkinen, Jukka; Gröhn, Lauri Turning water into rock
 Powered by TCPDF (www.tcpdf.org) This is an electronic reprint of the original article. This reprint may differ from the original in pagination and typographic detail. Häkkinen, Jukka; Gröhn, Lauri Turning
Powered by TCPDF (www.tcpdf.org) This is an electronic reprint of the original article. This reprint may differ from the original in pagination and typographic detail. Häkkinen, Jukka; Gröhn, Lauri Turning
Introduction. Stefano Ferrari. Università degli Studi di Milano Methods for Image Processing. academic year
 Introduction Stefano Ferrari Università degli Studi di Milano stefano.ferrari@unimi.it Methods for Image Processing academic year 2015 2016 Image processing Computer science concerns the representation,
Introduction Stefano Ferrari Università degli Studi di Milano stefano.ferrari@unimi.it Methods for Image Processing academic year 2015 2016 Image processing Computer science concerns the representation,
Colour correction for panoramic imaging
 Colour correction for panoramic imaging Gui Yun Tian Duke Gledhill Dave Taylor The University of Huddersfield David Clarke Rotography Ltd Abstract: This paper reports the problem of colour distortion in
Colour correction for panoramic imaging Gui Yun Tian Duke Gledhill Dave Taylor The University of Huddersfield David Clarke Rotography Ltd Abstract: This paper reports the problem of colour distortion in
MAV-ID card processing using camera images
 EE 5359 MULTIMEDIA PROCESSING SPRING 2013 PROJECT PROPOSAL MAV-ID card processing using camera images Under guidance of DR K R RAO DEPARTMENT OF ELECTRICAL ENGINEERING UNIVERSITY OF TEXAS AT ARLINGTON
EE 5359 MULTIMEDIA PROCESSING SPRING 2013 PROJECT PROPOSAL MAV-ID card processing using camera images Under guidance of DR K R RAO DEPARTMENT OF ELECTRICAL ENGINEERING UNIVERSITY OF TEXAS AT ARLINGTON
Homographies and Mosaics
 Homographies and Mosaics Jeffrey Martin (jeffrey-martin.com) with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2011 Why Mosaic? Are
Homographies and Mosaics Jeffrey Martin (jeffrey-martin.com) with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2011 Why Mosaic? Are
Advanced Robotics Introduction
 Advanced Robotics Introduction Institute for Software Technology 1 Agenda Motivation Some Definitions and Thought about Autonomous Robots History Challenges Application Examples 2 Bridge the Gap Mobile
Advanced Robotics Introduction Institute for Software Technology 1 Agenda Motivation Some Definitions and Thought about Autonomous Robots History Challenges Application Examples 2 Bridge the Gap Mobile
Today. Pattern Recognition. Introduction. Perceptual processing. Feature Integration Theory, cont d. Feature Integration Theory (FIT)
") Today Pattern Recognition Intro Psychology Georgia Tech Instructor: Dr. Bruce Walker Turning features into things Patterns Constancy Depth Illusions Introduction We have focused on the detection of features
Today Pattern Recognition Intro Psychology Georgia Tech Instructor: Dr. Bruce Walker Turning features into things Patterns Constancy Depth Illusions Introduction We have focused on the detection of features
Applications of Flash and No-Flash Image Pairs in Mobile Phone Photography
 Applications of Flash and No-Flash Image Pairs in Mobile Phone Photography Xi Luo Stanford University 450 Serra Mall, Stanford, CA 94305 xluo2@stanford.edu Abstract The project explores various application
Applications of Flash and No-Flash Image Pairs in Mobile Phone Photography Xi Luo Stanford University 450 Serra Mall, Stanford, CA 94305 xluo2@stanford.edu Abstract The project explores various application
Digitizing Color. Place Value in a Decimal Number. Place Value in a Binary Number. Chapter 11: Light, Sound, Magic: Representing Multimedia Digitally
 Chapter 11: Light, Sound, Magic: Representing Multimedia Digitally Fluency with Information Technology Third Edition by Lawrence Snyder Digitizing Color RGB Colors: Binary Representation Giving the intensities
Chapter 11: Light, Sound, Magic: Representing Multimedia Digitally Fluency with Information Technology Third Edition by Lawrence Snyder Digitizing Color RGB Colors: Binary Representation Giving the intensities