Spring 2018 CS543 / ECE549 Computer Vision. Course webpage URL:
|
|
|
- Alvin Freeman
- 6 years ago
- Views:
Transcription

1 Spring 2018 CS543 / ECE549 Computer Vision Course webpage URL:

2 The goal of computer vision To extract meaning from pixels What we see What a computer sees Source: S. Narasimhan


3 The goal of computer vision To extract meaning from pixels Humans are remarkably good at this Source: 80 million tiny images by Torralba et al.
4 What kind of informa.on can be extracted from an image? roof tree tree building door sky chimney building window trashcan car car person Outdoor scene ground City European Seman,c informa.on Geometric informa.on
5 Why study computer vision? Vision is useful Vision is interesting Vision is difficult Half of primate cerebral cortex is devoted to visual processing Achieving human-level image understanding is probably AI-complete
6 Successes of computer vision to date



7 Simple patterns



8 Faces

9 Faces Beijing bets on facial recognition in a big drive for total surveillance Washington Post, 1/8/2018


10 Face movies I. Kemelmacher-Shlizerman, E. Shechtman, R. Garg and S. Seitz, Exploring Photobios, SIGGRAPH 2011 YouTube Video

11 Automatic age progression I. Kemelmacher-Shlizerman, S. Suwajanakorn, and S. Seitz, Illumination-Aware Age Progression, CVPR 2014 YouTube Video

12 Digital puppetry S. Suwajanakorn, S. Seitz, and I. Kemelmacher-Shlizerman, Synthesizing Obama: Learning Lip Sync from Audio, SIGGRAPH 2017 YouTube Video

13 Reconstruction: 3D from photo collections Q. Shan, R. Adams, B. Curless, Y. Furukawa, and S. Seitz, The Visual Turing Test for Scene Reconstruction, 3DV 2013 YouTube Video

14 Reconstruction: 4D from photo collections R. Martin-Brualla, D. Gallup, and S. Seitz, Time-Lapse Mining from Internet Photos, SIGGRAPH 2015 YouTube Video

15 Reconstruction: 4D from depth cameras R. Newcombe, D. Fox, and S. Seitz, DynamicFusion: Reconstruction and Tracking of Non-rigid Scenes in Real-Time, CVPR 2015 YouTube Video

16 Reconstruction in construction industry reconstructinc.com Source: D. Hoiem


17 Recognition Computer Eyesight Gets a Lot More Accurate, NY Times Bits blog, August 18, 2014 Building A Deeper Understanding of Images, Google Research Blog, September 5, 2014

18 Self-driving cars
19 Why is computer vision difficult?



20 Challenges: viewpoint variation

21 Challenges: illumination image credit: J. Koenderink


22 Challenges: scale slide credit: Fei-Fei, Fergus & Torralba

23 Challenges: deformation Xu, Beihong 1943 slide credit: Fei-Fei, Fergus & Torralba





24 Challenges: object intra-class variation slide credit: Fei-Fei, Fergus & Torralba

25 Challenges: occlusion, clutter Image source: National Geographic

26 Challenges: Motion


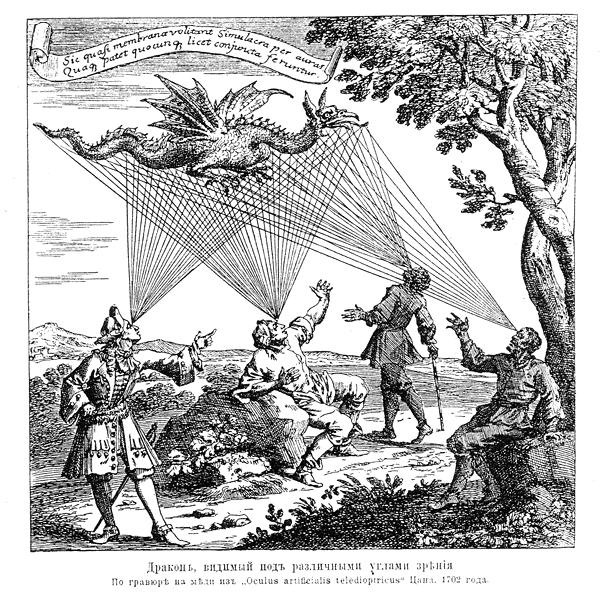
27 Challenges: ambiguity Many different 3D scenes could have given rise to a particular 2D picture


28 Challenges: ambiguity slide credit: Fei-Fei, Fergus & Torralba


29 Challenges: Semantic context

30 Challenges or opportunities? Images are confusing, but they also reveal the structure of the world through numerous cues Our job is to interpret the cues!

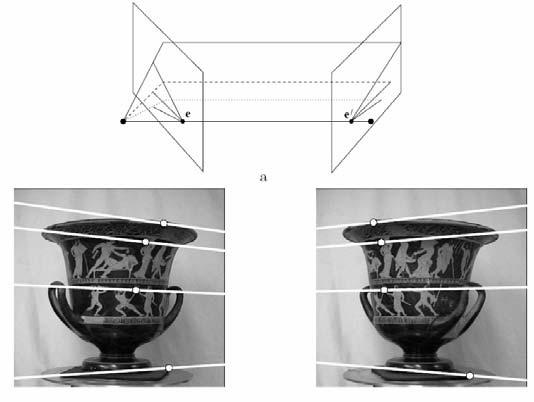
31 Depth cues: Linear perspective

32 Depth cues: Parallax

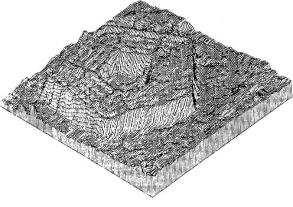
33 Shape cues: Texture gradient



34 Shape and lighting cues: Shading Michelangelo slide credit: Fei-Fei, Fergus & Torralba


35 Grouping cues: Similarity (color, texture, proximity)

36 Grouping cues: Common fate Image credit: Arthus-Bertrand (via F. Durand)

37 Origins of computer vision L. G. Roberts, Machine Perception of Three Dimensional Solids, Ph.D. thesis, MIT Department of Electrical Engineering, 1963.
38 Origins of computer vision Source: Fei-Fei Li
39 Connections to other disciplines Artificial Intelligence Robotics Machine Learning Computer Vision Computer Graphics Cognitive science Neuroscience Image Processing


40 Growth of the field Check out the list of CVPR 2017 corporate sponsors!
41 Course overview I. Early vision: Image formation and processing II. Mid-level vision: Grouping and fitting III. Multi-view geometry IV. Recognition V. Additional topics




42 I. Early vision Basic image formation and processing * = Cameras and sensors Light and color Linear filtering Edge detection Feature extraction, feature tracking


43 Fitting and grouping II. Mid-level vision Fitting: Least squares Hough transform RANSAC Alignment


44 III. Multi-view geometry Epipolar geometry Stereo Structure from motion 3D Photography


45 IV. Recognition Instance recognition, large-scale alignment Image classification Object detection Deep learning



46 V. Additional Topics (time permitting) Segmentation Video 3D scene understanding Images and text
Today I t n d ro ucti tion to computer vision Course overview Course requirements
 COMP 776: Computer Vision Today Introduction ti to computer vision i Course overview Course requirements The goal of computer vision To extract t meaning from pixels What we see What a computer sees Source:
COMP 776: Computer Vision Today Introduction ti to computer vision i Course overview Course requirements The goal of computer vision To extract t meaning from pixels What we see What a computer sees Source:
COMP 776: Computer Vision
 COMP 776: Computer Vision Basic Info Instructor: Svetlana Lazebnik (lazebnik@cs.unc.edu) Office hours: By appointment, FB 244 Textbook (recommended): Forsyth & Ponce, Computer Vision: A Modern Approach
COMP 776: Computer Vision Basic Info Instructor: Svetlana Lazebnik (lazebnik@cs.unc.edu) Office hours: By appointment, FB 244 Textbook (recommended): Forsyth & Ponce, Computer Vision: A Modern Approach
Introduction. Visual data acquisition devices. The goal of computer vision. The goal of computer vision. Vision as measurement device
 Spring 15 CIS 5543 Computer Vision Visual data acquisition devices Introduction Haibin Ling http://www.dabi.temple.edu/~hbling/teaching/15s_5543/index.html Revised from S. Lazebnik The goal of computer
Spring 15 CIS 5543 Computer Vision Visual data acquisition devices Introduction Haibin Ling http://www.dabi.temple.edu/~hbling/teaching/15s_5543/index.html Revised from S. Lazebnik The goal of computer
Introduction. BIL719 Computer Vision Pinar Duygulu Hacettepe University
 Introduction BIL719 Computer Vision Pinar Duygulu Hacettepe University Basic Info Textbooks (suggested): Forsyth & Ponce, Computer Vision: A Modern Approach Richard Szeliski, Computer Vision: Algorithms
Introduction BIL719 Computer Vision Pinar Duygulu Hacettepe University Basic Info Textbooks (suggested): Forsyth & Ponce, Computer Vision: A Modern Approach Richard Szeliski, Computer Vision: Algorithms
CSE 408 Multimedia Information System
 CSE 408 Multimedia Information System Intro to Images & Vision Yezhou Yang Lots of slides from Tamara Berg and L. Feifei Intro to Computer Vision Source: L. Lazebnik The goal of computer vision To perceive
CSE 408 Multimedia Information System Intro to Images & Vision Yezhou Yang Lots of slides from Tamara Berg and L. Feifei Intro to Computer Vision Source: L. Lazebnik The goal of computer vision To perceive
Lecture 1 Introduction to Computer Vision. Lin ZHANG, PhD School of Software Engineering, Tongji University Spring 2014
 Lecture 1 Introduction to Computer Vision Lin ZHANG, PhD School of Software Engineering, Tongji University Spring 2014 Course Info Contact Information Room 314, Jishi Building Email: cslinzhang@tongji.edu.cn
Lecture 1 Introduction to Computer Vision Lin ZHANG, PhD School of Software Engineering, Tongji University Spring 2014 Course Info Contact Information Room 314, Jishi Building Email: cslinzhang@tongji.edu.cn
Lecture 1 Introduction to Computer Vision. Lin ZHANG, PhD School of Software Engineering, Tongji University Spring 2015
 Lecture 1 Introduction to Computer Vision Lin ZHANG, PhD School of Software Engineering, Tongji University Spring 2015 Course Info Contact Information Room 314, Jishi Building Email: cslinzhang@tongji.edu.cn
Lecture 1 Introduction to Computer Vision Lin ZHANG, PhD School of Software Engineering, Tongji University Spring 2015 Course Info Contact Information Room 314, Jishi Building Email: cslinzhang@tongji.edu.cn
Lecture 1 Introduction to Computer Vision. Lin ZHANG, PhD School of Software Engineering, Tongji University Spring 2018
 Lecture 1 Introduction to Computer Vision Lin ZHANG, PhD School of Software Engineering, Tongji University Spring 2018 Course Info Contact Information Room 408L, Jishi Building Email: cslinzhang@tongji.edu.cn
Lecture 1 Introduction to Computer Vision Lin ZHANG, PhD School of Software Engineering, Tongji University Spring 2018 Course Info Contact Information Room 408L, Jishi Building Email: cslinzhang@tongji.edu.cn
Computer Vision Lecture 1
 Computer Vision Lecture 1 Introduction 19.10.2016 Bastian Leibe Visual Computing Institute RWTH Aachen University http://www.vision.rwth-aachen.de/ leibe@vision.rwth-aachen.de Organization Lecturer Prof.
Computer Vision Lecture 1 Introduction 19.10.2016 Bastian Leibe Visual Computing Institute RWTH Aachen University http://www.vision.rwth-aachen.de/ leibe@vision.rwth-aachen.de Organization Lecturer Prof.
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt.
 CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Session 1 - Introduction Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering Lab e-mail:
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Session 1 - Introduction Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering Lab e-mail:
CSE 473/573 Computer Vision and Image Processing (CVIP) Ifeoma Nwogu
 Ifeoma Nwogu") CSE 473/573 Computer Vision and Image Processing (CVIP) Ifeoma Nwogu inwogu@buffalo.edu Today Logistics Schedule Introductions What is computer vision? Why is vision so hard? Prerequisites This course
CSE 473/573 Computer Vision and Image Processing (CVIP) Ifeoma Nwogu inwogu@buffalo.edu Today Logistics Schedule Introductions What is computer vision? Why is vision so hard? Prerequisites This course
Recognition problems. Object Recognition. Readings. What is recognition?
 Recognition problems Object Recognition Computer Vision CSE576, Spring 2008 Richard Szeliski What is it? Object and scene recognition Who is it? Identity recognition Where is it? Object detection What
Recognition problems Object Recognition Computer Vision CSE576, Spring 2008 Richard Szeliski What is it? Object and scene recognition Who is it? Identity recognition Where is it? Object detection What
CENG 595 Selected Topics in Computer Engineering Computer Vision. Zafer ARICAN, PhD
 CENG 595 Selected Topics in Computer Engineering Computer Vision Zafer ARICAN, PhD Today Administrivia What is Computer Vision? Why is it a difficult problem? State-of-the art Brief course syllabus Instructor
CENG 595 Selected Topics in Computer Engineering Computer Vision Zafer ARICAN, PhD Today Administrivia What is Computer Vision? Why is it a difficult problem? State-of-the art Brief course syllabus Instructor
Image Analysis & Searching
 Image Analysis & Searching 1 Searching Photos Look for photos like this one: Look for beach photos Look for photos taken Sept. 15, 2000 Look for photos with: Look for photos with Aunt Thelma 2 Annotating
Image Analysis & Searching 1 Searching Photos Look for photos like this one: Look for beach photos Look for photos taken Sept. 15, 2000 Look for photos with: Look for photos with Aunt Thelma 2 Annotating
CS 131 Lecture 1: Course introduction
 CS 131 Lecture 1: Course introduction Olivier Moindrot Department of Computer Science Stanford University Stanford, CA 94305 olivierm@stanford.edu 1 What is computer vision? 1.1 Definition Two definitions
CS 131 Lecture 1: Course introduction Olivier Moindrot Department of Computer Science Stanford University Stanford, CA 94305 olivierm@stanford.edu 1 What is computer vision? 1.1 Definition Two definitions
Computer Vision. Thursday, August 30
 Computer Vision Thursday, August 30 1 Today Course overview Requirements, logistics Image formation 2 Introductions Instructor: Prof. Kristen Grauman grauman @ cs TAY 4.118, Thurs 2-4 pm TA: Sudheendra
Computer Vision Thursday, August 30 1 Today Course overview Requirements, logistics Image formation 2 Introductions Instructor: Prof. Kristen Grauman grauman @ cs TAY 4.118, Thurs 2-4 pm TA: Sudheendra
Today. CS 395T Visual Recognition. Course content. Administration. Expectations. Paper reviews
 Today CS 395T Visual Recognition Course logistics Overview Volunteers, prep for next week Thursday, January 18 Administration Class: Tues / Thurs 12:30-2 PM Instructor: Kristen Grauman grauman at cs.utexas.edu
Today CS 395T Visual Recognition Course logistics Overview Volunteers, prep for next week Thursday, January 18 Administration Class: Tues / Thurs 12:30-2 PM Instructor: Kristen Grauman grauman at cs.utexas.edu
Lecture 19: Depth Cameras. Kayvon Fatahalian CMU : Graphics and Imaging Architectures (Fall 2011)
") Lecture 19: Depth Cameras Kayvon Fatahalian CMU 15-869: Graphics and Imaging Architectures (Fall 2011) Continuing theme: computational photography Cheap cameras capture light, extensive processing produces
Lecture 19: Depth Cameras Kayvon Fatahalian CMU 15-869: Graphics and Imaging Architectures (Fall 2011) Continuing theme: computational photography Cheap cameras capture light, extensive processing produces
Computational Photography
 Computational photography Computational Photography Digital Visual Effects Yung-Yu Chuang wikipedia: Computational photography h refers broadly to computational imaging techniques that enhance or extend
Computational photography Computational Photography Digital Visual Effects Yung-Yu Chuang wikipedia: Computational photography h refers broadly to computational imaging techniques that enhance or extend
Occlusion. Atmospheric Perspective. Height in the Field of View. Seeing Depth The Cue Approach. Monocular/Pictorial
 Seeing Depth The Cue Approach Occlusion Monocular/Pictorial Cues that are available in the 2D image Height in the Field of View Atmospheric Perspective 1 Linear Perspective Linear Perspective & Texture
Seeing Depth The Cue Approach Occlusion Monocular/Pictorial Cues that are available in the 2D image Height in the Field of View Atmospheric Perspective 1 Linear Perspective Linear Perspective & Texture
Digital image processing vs. computer vision Higher-level anchoring
 Digital image processing vs. computer vision Higher-level anchoring Václav Hlaváč Czech Technical University in Prague Faculty of Electrical Engineering, Department of Cybernetics Center for Machine Perception
Digital image processing vs. computer vision Higher-level anchoring Václav Hlaváč Czech Technical University in Prague Faculty of Electrical Engineering, Department of Cybernetics Center for Machine Perception
Introduction to Vision. Alan L. Yuille. UCLA.
 Introduction to Vision Alan L. Yuille. UCLA. IPAM Summer School 2013 3 weeks of online lectures on Vision. What papers do I read in computer vision? There are so many and they are so different. Main Points
Introduction to Vision Alan L. Yuille. UCLA. IPAM Summer School 2013 3 weeks of online lectures on Vision. What papers do I read in computer vision? There are so many and they are so different. Main Points
On the Recovery of Depth from a Single Defocused Image
 On the Recovery of Depth from a Single Defocused Image Shaojie Zhuo and Terence Sim School of Computing National University of Singapore Singapore,747 Abstract. In this paper we address the challenging
On the Recovery of Depth from a Single Defocused Image Shaojie Zhuo and Terence Sim School of Computing National University of Singapore Singapore,747 Abstract. In this paper we address the challenging
High Level Computer Vision. Introduction - April 16, Bernt Schiele & Mario Fritz MPI Informatics and Saarland University, Saarbrücken, Germany
 Perceptual and Sensory Augmented Computing High Level Computer Vision Introduction - April 16, 2014 MPI Informatics and Saarland University, Saarbrücken, Germany http://www.d2.mpi-inf.mpg.de/cv Computer
Perceptual and Sensory Augmented Computing High Level Computer Vision Introduction - April 16, 2014 MPI Informatics and Saarland University, Saarbrücken, Germany http://www.d2.mpi-inf.mpg.de/cv Computer
CS354 Computer Graphics Computational Photography. Qixing Huang April 23 th 2018
 CS354 Computer Graphics Computational Photography Qixing Huang April 23 th 2018 Background Sales of digital cameras surpassed sales of film cameras in 2004 Digital Cameras Free film Instant display Quality
CS354 Computer Graphics Computational Photography Qixing Huang April 23 th 2018 Background Sales of digital cameras surpassed sales of film cameras in 2004 Digital Cameras Free film Instant display Quality
DIGITAL IMAGE PROCESSING
 DIGITAL IMAGE PROCESSING Lecture 1 Introduction Tammy Riklin Raviv Electrical and Computer Engineering Ben-Gurion University of the Negev 2 Introduction to Digital Image Processing Lecturer: Dr. Tammy
DIGITAL IMAGE PROCESSING Lecture 1 Introduction Tammy Riklin Raviv Electrical and Computer Engineering Ben-Gurion University of the Negev 2 Introduction to Digital Image Processing Lecturer: Dr. Tammy
Intro to AI. AI is a huge field. AI is a huge field 2/19/15. What is AI. One definition:
 Intro to AI CS30 David Kauchak Spring 2015 http://www.bbspot.com/comics/pc-weenies/2008/02/3248.php Adapted from notes from: Sara Owsley Sood AI is a huge field What is AI AI is a huge field What is AI
Intro to AI CS30 David Kauchak Spring 2015 http://www.bbspot.com/comics/pc-weenies/2008/02/3248.php Adapted from notes from: Sara Owsley Sood AI is a huge field What is AI AI is a huge field What is AI
Virtual Worlds for the Perception and Control of Self-Driving Vehicles
 Virtual Worlds for the Perception and Control of Self-Driving Vehicles Dr. Antonio M. López antonio@cvc.uab.es Index Context SYNTHIA: CVPR 16 SYNTHIA: Reloaded SYNTHIA: Evolutions CARLA Conclusions Index
Virtual Worlds for the Perception and Control of Self-Driving Vehicles Dr. Antonio M. López antonio@cvc.uab.es Index Context SYNTHIA: CVPR 16 SYNTHIA: Reloaded SYNTHIA: Evolutions CARLA Conclusions Index
Intro to AI. AI is a huge field. AI is a huge field 2/26/16. What is AI (artificial intelligence) What is AI. One definition:
 What is AI. One definition:") Intro to AI CS30 David Kauchak Spring 2016 http://www.bbspot.com/comics/pc-weenies/2008/02/3248.php Adapted from notes from: Sara Owsley Sood AI is a huge field What is AI (artificial intelligence) AI
Intro to AI CS30 David Kauchak Spring 2016 http://www.bbspot.com/comics/pc-weenies/2008/02/3248.php Adapted from notes from: Sara Owsley Sood AI is a huge field What is AI (artificial intelligence) AI
Next Classes. Spatial frequency Fourier transform and frequency domain. Reminder: Textbook. Frequency view of filtering Hybrid images Sampling
 Salvador Dali, 1976 Next Classes Spatial frequency Fourier transform and frequency domain Frequency view of filtering Hybrid images Sampling Reminder: Textbook Today s lecture covers material in 3.4 Slide:
Salvador Dali, 1976 Next Classes Spatial frequency Fourier transform and frequency domain Frequency view of filtering Hybrid images Sampling Reminder: Textbook Today s lecture covers material in 3.4 Slide:
Regan Mandryk. Depth and Space Perception
 Depth and Space Perception Regan Mandryk Disclaimer Many of these slides include animated gifs or movies that may not be viewed on your computer system. They should run on the latest downloads of Quick
Depth and Space Perception Regan Mandryk Disclaimer Many of these slides include animated gifs or movies that may not be viewed on your computer system. They should run on the latest downloads of Quick
Light-Field Database Creation and Depth Estimation
 Light-Field Database Creation and Depth Estimation Abhilash Sunder Raj abhisr@stanford.edu Michael Lowney mlowney@stanford.edu Raj Shah shahraj@stanford.edu Abstract Light-field imaging research has been
Light-Field Database Creation and Depth Estimation Abhilash Sunder Raj abhisr@stanford.edu Michael Lowney mlowney@stanford.edu Raj Shah shahraj@stanford.edu Abstract Light-field imaging research has been
Changyin Zhou. Ph.D, Computer Science, Columbia University Oct 2012
 Changyin Zhou Software Engineer at Google X Google Inc. 1600 Amphitheater Parkway, Mountain View, CA 94043 E-mail: changyin@google.com URL: http://www.changyin.org Office: (917) 209-9110 Mobile: (646)
Changyin Zhou Software Engineer at Google X Google Inc. 1600 Amphitheater Parkway, Mountain View, CA 94043 E-mail: changyin@google.com URL: http://www.changyin.org Office: (917) 209-9110 Mobile: (646)
Communicating Science. Through Visualization
 Communicating Science Through Visualization In an Age of Alternative Facts AJ Christensen University of Illinois at Urbana-Champaign Advanced Visualization Lab Vocabulary Alternative Facts n. 1. Statements
Communicating Science Through Visualization In an Age of Alternative Facts AJ Christensen University of Illinois at Urbana-Champaign Advanced Visualization Lab Vocabulary Alternative Facts n. 1. Statements
Face Detection System on Ada boost Algorithm Using Haar Classifiers
 Vol.2, Issue.6, Nov-Dec. 2012 pp-3996-4000 ISSN: 2249-6645 Face Detection System on Ada boost Algorithm Using Haar Classifiers M. Gopi Krishna, A. Srinivasulu, Prof (Dr.) T.K.Basak 1, 2 Department of Electronics
Vol.2, Issue.6, Nov-Dec. 2012 pp-3996-4000 ISSN: 2249-6645 Face Detection System on Ada boost Algorithm Using Haar Classifiers M. Gopi Krishna, A. Srinivasulu, Prof (Dr.) T.K.Basak 1, 2 Department of Electronics
Intro to Virtual Reality (Cont)
") Lecture 37: Intro to Virtual Reality (Cont) Computer Graphics and Imaging UC Berkeley CS184/284A Overview of VR Topics Areas we will discuss over next few lectures VR Displays VR Rendering VR Imaging CS184/284A
Lecture 37: Intro to Virtual Reality (Cont) Computer Graphics and Imaging UC Berkeley CS184/284A Overview of VR Topics Areas we will discuss over next few lectures VR Displays VR Rendering VR Imaging CS184/284A
Supplementary Material of
 Supplementary Material of Efficient and Robust Color Consistency for Community Photo Collections Jaesik Park Intel Labs Yu-Wing Tai SenseTime Sudipta N. Sinha Microsoft Research In So Kweon KAIST In the
Supplementary Material of Efficient and Robust Color Consistency for Community Photo Collections Jaesik Park Intel Labs Yu-Wing Tai SenseTime Sudipta N. Sinha Microsoft Research In So Kweon KAIST In the
Ant? Bird? Dog? Human -SURE
 ECE 172A: Intelligent Systems: Introduction Week 1 (October 1, 2007): Course Introduction and Announcements Intelligent Robots as Intelligent Systems A systems perspective of Intelligent Robots and capabilities
ECE 172A: Intelligent Systems: Introduction Week 1 (October 1, 2007): Course Introduction and Announcements Intelligent Robots as Intelligent Systems A systems perspective of Intelligent Robots and capabilities
The Distributed Camera
 The Distributed Camera Noah Snavely Cornell University Microsoft Faculty Summit June 16, 2013 The Age of Exapixel Image Data Over a trillion photos available online Millions uploaded every hour Interconnected
The Distributed Camera Noah Snavely Cornell University Microsoft Faculty Summit June 16, 2013 The Age of Exapixel Image Data Over a trillion photos available online Millions uploaded every hour Interconnected
Computer Vision Lesson Plan
 Computer Vision Lesson Plan Overview Computer Vision Summary Computers today are being used to accomplish tasks that require using one or more of the five senses. Vision - seeing objects and identifying
Computer Vision Lesson Plan Overview Computer Vision Summary Computers today are being used to accomplish tasks that require using one or more of the five senses. Vision - seeing objects and identifying
The Human Visual System!
 an engineering-focused introduction to! The Human Visual System! EE367/CS448I: Computational Imaging and Display! stanford.edu/class/ee367! Lecture 2! Gordon Wetzstein! Stanford University! nautilus eye,
an engineering-focused introduction to! The Human Visual System! EE367/CS448I: Computational Imaging and Display! stanford.edu/class/ee367! Lecture 2! Gordon Wetzstein! Stanford University! nautilus eye,
Computational Photography Introduction
 Computational Photography Introduction Jongmin Baek CS 478 Lecture Jan 9, 2012 Background Sales of digital cameras surpassed sales of film cameras in 2004. Digital cameras are cool Free film Instant display
Computational Photography Introduction Jongmin Baek CS 478 Lecture Jan 9, 2012 Background Sales of digital cameras surpassed sales of film cameras in 2004. Digital cameras are cool Free film Instant display
Deblurring. Basics, Problem definition and variants
 Deblurring Basics, Problem definition and variants Kinds of blur Hand-shake Defocus Credit: Kenneth Josephson Motion Credit: Kenneth Josephson Kinds of blur Spatially invariant vs. Spatially varying
Deblurring Basics, Problem definition and variants Kinds of blur Hand-shake Defocus Credit: Kenneth Josephson Motion Credit: Kenneth Josephson Kinds of blur Spatially invariant vs. Spatially varying
CS6670: Computer Vision
 CS6670: Computer Vision Noah Snavely Lecture 22: Computational photography photomatix.com Announcements Final project midterm reports due on Tuesday to CMS by 11:59pm BRDF s can be incredibly complicated
CS6670: Computer Vision Noah Snavely Lecture 22: Computational photography photomatix.com Announcements Final project midterm reports due on Tuesday to CMS by 11:59pm BRDF s can be incredibly complicated
Practical Image and Video Processing Using MATLAB
 Practical Image and Video Processing Using MATLAB Chapter 1 Introduction and overview What will we learn? What is image processing? What are the main applications of image processing? What is an image?
Practical Image and Video Processing Using MATLAB Chapter 1 Introduction and overview What will we learn? What is image processing? What are the main applications of image processing? What is an image?
An Un-awarely Collected Real World Face Database: The ISL-Door Face Database
 An Un-awarely Collected Real World Face Database: The ISL-Door Face Database Hazım Kemal Ekenel, Rainer Stiefelhagen Interactive Systems Labs (ISL), Universität Karlsruhe (TH), Am Fasanengarten 5, 76131
An Un-awarely Collected Real World Face Database: The ISL-Door Face Database Hazım Kemal Ekenel, Rainer Stiefelhagen Interactive Systems Labs (ISL), Universität Karlsruhe (TH), Am Fasanengarten 5, 76131
OBJECTIVE OF THE BOOK ORGANIZATION OF THE BOOK
 xv Preface Advancement in technology leads to wide spread use of mounting cameras to capture video imagery. Such surveillance cameras are predominant in commercial institutions through recording the cameras
xv Preface Advancement in technology leads to wide spread use of mounting cameras to capture video imagery. Such surveillance cameras are predominant in commercial institutions through recording the cameras
Short Course on Computational Illumination
 Short Course on Computational Illumination University of Tampere August 9/10, 2012 Matthew Turk Computer Science Department and Media Arts and Technology Program University of California, Santa Barbara
Short Course on Computational Illumination University of Tampere August 9/10, 2012 Matthew Turk Computer Science Department and Media Arts and Technology Program University of California, Santa Barbara
Introduction , , Computational Photography Fall 2018, Lecture 1
 Introduction http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 1 Overview of today s lecture Teaching staff introductions What is computational
Introduction http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 1 Overview of today s lecture Teaching staff introductions What is computational
Introduction. Ioannis Rekleitis
 Introduction Ioannis Rekleitis Why Image Processing? Who here has a camera? How many cameras do you have Point where computers fast/cheap Cameras become omnipresent Deep Learning CSCE 590: Introduction
Introduction Ioannis Rekleitis Why Image Processing? Who here has a camera? How many cameras do you have Point where computers fast/cheap Cameras become omnipresent Deep Learning CSCE 590: Introduction
Introduction to Computer Vision
 Introduction to Computer Vision by James Hays Image by kirkh.deviantart.com Categories of the SUN database What is Computer Vision? Computer Vision and Nearby Fields Computer Graphics: Models to Images
Introduction to Computer Vision by James Hays Image by kirkh.deviantart.com Categories of the SUN database What is Computer Vision? Computer Vision and Nearby Fields Computer Graphics: Models to Images
Face detection, face alignment, and face image parsing
 Lecture overview Face detection, face alignment, and face image parsing Brandon M. Smith Guest Lecturer, CS 534 Monday, October 21, 2013 Brief introduction to local features Face detection Face alignment
Lecture overview Face detection, face alignment, and face image parsing Brandon M. Smith Guest Lecturer, CS 534 Monday, October 21, 2013 Brief introduction to local features Face detection Face alignment
Non-Uniform Motion Blur For Face Recognition
 IOSR Journal of Engineering (IOSRJEN) ISSN (e): 2250-3021, ISSN (p): 2278-8719 Vol. 08, Issue 6 (June. 2018), V (IV) PP 46-52 www.iosrjen.org Non-Uniform Motion Blur For Face Recognition Durga Bhavani
IOSR Journal of Engineering (IOSRJEN) ISSN (e): 2250-3021, ISSN (p): 2278-8719 Vol. 08, Issue 6 (June. 2018), V (IV) PP 46-52 www.iosrjen.org Non-Uniform Motion Blur For Face Recognition Durga Bhavani
Application Areas of AI Artificial intelligence is divided into different branches which are mentioned below:
 Week 2 - o Expert Systems o Natural Language Processing (NLP) o Computer Vision o Speech Recognition And Generation o Robotics o Neural Network o Virtual Reality APPLICATION AREAS OF ARTIFICIAL INTELLIGENCE
Week 2 - o Expert Systems o Natural Language Processing (NLP) o Computer Vision o Speech Recognition And Generation o Robotics o Neural Network o Virtual Reality APPLICATION AREAS OF ARTIFICIAL INTELLIGENCE
Prof Trivedi ECE253A Notes for Students only
 ECE 253A: Digital Processing: Course Related Class Website: https://sites.google.com/a/eng.ucsd.edu/ece253fall2017/ Course Graduate Assistants: Nachiket Deo Borhan Vasili Kirill Pirozenko Piazza Grading:
ECE 253A: Digital Processing: Course Related Class Website: https://sites.google.com/a/eng.ucsd.edu/ece253fall2017/ Course Graduate Assistants: Nachiket Deo Borhan Vasili Kirill Pirozenko Piazza Grading:
CSE 455: Computer Vision
 CSE 455: Computer Vision Instructors TAs Neel Joshi neel@cs Ira Kemelmacher kemelmi@cs Ian Simon iansimon@cs Rahul Garg rahul@cs Jiun-Hung Chen jhchen@cs Web Page http://www.cs.washington.edu/455 Time:
CSE 455: Computer Vision Instructors TAs Neel Joshi neel@cs Ira Kemelmacher kemelmi@cs Ian Simon iansimon@cs Rahul Garg rahul@cs Jiun-Hung Chen jhchen@cs Web Page http://www.cs.washington.edu/455 Time:
Humans used a web interface to say same person or different person for a large set of faces. Several computer programs made the same comparisons
 OPTO 6124 Perception Scott Stevenson Image Segmentation What is really behind so many perception demos? Perception demos show us that our visual understanding of the world involves a lot of filling in
OPTO 6124 Perception Scott Stevenson Image Segmentation What is really behind so many perception demos? Perception demos show us that our visual understanding of the world involves a lot of filling in
Interacting within Virtual Worlds (based on talks by Greg Welch and Mark Mine)
") Interacting within Virtual Worlds (based on talks by Greg Welch and Mark Mine) Presentation Working in a virtual world Interaction principles Interaction examples Why VR in the First Place? Direct perception
Interacting within Virtual Worlds (based on talks by Greg Welch and Mark Mine) Presentation Working in a virtual world Interaction principles Interaction examples Why VR in the First Place? Direct perception
Simulated Programmable Apertures with Lytro
 Simulated Programmable Apertures with Lytro Yangyang Yu Stanford University yyu10@stanford.edu Abstract This paper presents a simulation method using the commercial light field camera Lytro, which allows
Simulated Programmable Apertures with Lytro Yangyang Yu Stanford University yyu10@stanford.edu Abstract This paper presents a simulation method using the commercial light field camera Lytro, which allows
Manipulation. Manipulation. Better Vision through Manipulation. Giorgio Metta Paul Fitzpatrick. Humanoid Robotics Group.
 Manipulation Manipulation Better Vision through Manipulation Giorgio Metta Paul Fitzpatrick Humanoid Robotics Group MIT AI Lab Vision & Manipulation In robotics, vision is often used to guide manipulation
Manipulation Manipulation Better Vision through Manipulation Giorgio Metta Paul Fitzpatrick Humanoid Robotics Group MIT AI Lab Vision & Manipulation In robotics, vision is often used to guide manipulation
Event-based Algorithms for Robust and High-speed Robotics
 Event-based Algorithms for Robust and High-speed Robotics Davide Scaramuzza All my research on event-based vision is summarized on this page: http://rpg.ifi.uzh.ch/research_dvs.html Davide Scaramuzza University
Event-based Algorithms for Robust and High-speed Robotics Davide Scaramuzza All my research on event-based vision is summarized on this page: http://rpg.ifi.uzh.ch/research_dvs.html Davide Scaramuzza University
Fast and High-Quality Image Blending on Mobile Phones
 Fast and High-Quality Image Blending on Mobile Phones Yingen Xiong and Kari Pulli Nokia Research Center 955 Page Mill Road Palo Alto, CA 94304 USA Email: {yingenxiong, karipulli}@nokiacom Abstract We present
Fast and High-Quality Image Blending on Mobile Phones Yingen Xiong and Kari Pulli Nokia Research Center 955 Page Mill Road Palo Alto, CA 94304 USA Email: {yingenxiong, karipulli}@nokiacom Abstract We present
CS6550 Computer Vision
 CS6550 Computer Vision Class Meeting: M7M8 (3:30pm 5:20pm), R6 (2:20pm 3:10pm). Rm 106 Delta Bldg., 台達館 106 室 Instructor: Prof. Shang-Hong Lai, Rm. 636 Delta Bldg., 賴尚宏, 台達館 636 室, Tel: ext. 42958, Email:
CS6550 Computer Vision Class Meeting: M7M8 (3:30pm 5:20pm), R6 (2:20pm 3:10pm). Rm 106 Delta Bldg., 台達館 106 室 Instructor: Prof. Shang-Hong Lai, Rm. 636 Delta Bldg., 賴尚宏, 台達館 636 室, Tel: ext. 42958, Email:
Value-added Applications with Deep Learning. src:
 SMART TOURISM Value-added Applications with Deep Learning src: https://www.wttc.org/-/media/files/reports/economic-impact-research/countries-2017/thailand2017.pdf Somnuk Phon-Amnuaisuk, Minh-Son Dao, CIE,
SMART TOURISM Value-added Applications with Deep Learning src: https://www.wttc.org/-/media/files/reports/economic-impact-research/countries-2017/thailand2017.pdf Somnuk Phon-Amnuaisuk, Minh-Son Dao, CIE,
Computational Approaches to Cameras
 Computational Approaches to Cameras 11/16/17 Magritte, The False Mirror (1935) Computational Photography Derek Hoiem, University of Illinois Announcements Final project proposal due Monday (see links on
Computational Approaches to Cameras 11/16/17 Magritte, The False Mirror (1935) Computational Photography Derek Hoiem, University of Illinois Announcements Final project proposal due Monday (see links on
the dimensionality of the world Travelling through Space and Time Learning Outcomes Johannes M. Zanker
 Travelling through Space and Time Johannes M. Zanker http://www.pc.rhul.ac.uk/staff/j.zanker/ps1061/l4/ps1061_4.htm 05/02/2015 PS1061 Sensation & Perception #4 JMZ 1 Learning Outcomes at the end of this
Travelling through Space and Time Johannes M. Zanker http://www.pc.rhul.ac.uk/staff/j.zanker/ps1061/l4/ps1061_4.htm 05/02/2015 PS1061 Sensation & Perception #4 JMZ 1 Learning Outcomes at the end of this
Virtual Reality I. Visual Imaging in the Electronic Age. Donald P. Greenberg November 9, 2017 Lecture #21
 Virtual Reality I Visual Imaging in the Electronic Age Donald P. Greenberg November 9, 2017 Lecture #21 1968: Ivan Sutherland 1990s: HMDs, Henry Fuchs 2013: Google Glass History of Virtual Reality 2016:
Virtual Reality I Visual Imaging in the Electronic Age Donald P. Greenberg November 9, 2017 Lecture #21 1968: Ivan Sutherland 1990s: HMDs, Henry Fuchs 2013: Google Glass History of Virtual Reality 2016:
Perception. What We Will Cover in This Section. Perception. How we interpret the information our senses receive. Overview Perception
 Perception 10/3/2002 Perception.ppt 1 What We Will Cover in This Section Overview Perception Visual perception. Organizing principles. 10/3/2002 Perception.ppt 2 Perception How we interpret the information
Perception 10/3/2002 Perception.ppt 1 What We Will Cover in This Section Overview Perception Visual perception. Organizing principles. 10/3/2002 Perception.ppt 2 Perception How we interpret the information
APPLICATION OF COMPUTER VISION FOR DETERMINATION OF SYMMETRICAL OBJECT POSITION IN THREE DIMENSIONAL SPACE
 APPLICATION OF COMPUTER VISION FOR DETERMINATION OF SYMMETRICAL OBJECT POSITION IN THREE DIMENSIONAL SPACE Najirah Umar 1 1 Jurusan Teknik Informatika, STMIK Handayani Makassar Email : najirah_stmikh@yahoo.com
APPLICATION OF COMPUTER VISION FOR DETERMINATION OF SYMMETRICAL OBJECT POSITION IN THREE DIMENSIONAL SPACE Najirah Umar 1 1 Jurusan Teknik Informatika, STMIK Handayani Makassar Email : najirah_stmikh@yahoo.com
Video Registration: Key Challenges. Richard Szeliski Microsoft Research
 Video Registration: Key Challenges Richard Szeliski Microsoft Research 1. 2. 3. 4. 5. 6. 7. 8. 9. 10. Key Challenges 1. Mosaics and panoramas 2. Object-based based segmentation (MPEG-4) 3. Engineering
Video Registration: Key Challenges Richard Szeliski Microsoft Research 1. 2. 3. 4. 5. 6. 7. 8. 9. 10. Key Challenges 1. Mosaics and panoramas 2. Object-based based segmentation (MPEG-4) 3. Engineering
Andy Zeng 35 Olden Street Princeton NJ cs.princeton.edu/~andyz
 Andy Zeng 35 Olden Street Princeton NJ 08540 andyz@princeton.edu cs.princeton.edu/~andyz Education Princeton University, Princeton NJ PhD, Department of Computer Science Advisor: Thomas Funkhouser Princeton
Andy Zeng 35 Olden Street Princeton NJ 08540 andyz@princeton.edu cs.princeton.edu/~andyz Education Princeton University, Princeton NJ PhD, Department of Computer Science Advisor: Thomas Funkhouser Princeton
Automatic understanding of the visual world
 Automatic understanding of the visual world 1 Machine visual perception Artificial capacity to see, understand the visual world Object recognition Image or sequence of images Action recognition 2 Machine
Automatic understanding of the visual world 1 Machine visual perception Artificial capacity to see, understand the visual world Object recognition Image or sequence of images Action recognition 2 Machine
What is a digital image?
 Lec. 26, Thursday, Nov. 18 Digital imaging (not in the book) We are here Matrices and bit maps How many pixels How many shades? CCD Digital light projector Image compression: JPEG and MPEG Chapter 8: Binocular
Lec. 26, Thursday, Nov. 18 Digital imaging (not in the book) We are here Matrices and bit maps How many pixels How many shades? CCD Digital light projector Image compression: JPEG and MPEG Chapter 8: Binocular
Capturing Light. The Light Field. Grayscale Snapshot 12/1/16. P(q, f)
") Capturing Light Rooms by the Sea, Edward Hopper, 1951 The Penitent Magdalen, Georges de La Tour, c. 1640 Some slides from M. Agrawala, F. Durand, P. Debevec, A. Efros, R. Fergus, D. Forsyth, M. Levoy,
Capturing Light Rooms by the Sea, Edward Hopper, 1951 The Penitent Magdalen, Georges de La Tour, c. 1640 Some slides from M. Agrawala, F. Durand, P. Debevec, A. Efros, R. Fergus, D. Forsyth, M. Levoy,
 COMP 9517 Computer Vision Introduc
COMP 9517 Computer Vision Introduc Lenses, exposure, and (de)focus
focus") Lenses, exposure, and (de)focus http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 15 Course announcements Homework 4 is out. - Due October 26
Lenses, exposure, and (de)focus http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 15 Course announcements Homework 4 is out. - Due October 26
Limitations of the Medium, compensation or accentuation
 The Art and Science of Depiction Limitations of the Medium, compensation or accentuation Fredo Durand MIT- Lab for Computer Science Limitations of the medium The medium cannot usually produce the same
The Art and Science of Depiction Limitations of the Medium, compensation or accentuation Fredo Durand MIT- Lab for Computer Science Limitations of the medium The medium cannot usually produce the same
Limitations of the medium
 The Art and Science of Depiction Limitations of the Medium, compensation or accentuation Limitations of the medium The medium cannot usually produce the same stimulus Real scene (possibly imaginary) Stimulus
The Art and Science of Depiction Limitations of the Medium, compensation or accentuation Limitations of the medium The medium cannot usually produce the same stimulus Real scene (possibly imaginary) Stimulus
- Basics of informatics - Computer network - Software engineering - Intelligent media processing - Human interface. Professor. Professor.
 - Basics of informatics - Computer network - Software engineering - Intelligent media processing - Human interface Computer-Aided Engineering Research of power/signal integrity analysis and EMC design
- Basics of informatics - Computer network - Software engineering - Intelligent media processing - Human interface Computer-Aided Engineering Research of power/signal integrity analysis and EMC design
The Future of AI A Robotics Perspective
 The Future of AI A Robotics Perspective Wolfram Burgard Autonomous Intelligent Systems Department of Computer Science University of Freiburg Germany The Future of AI My Robotics Perspective Wolfram Burgard
The Future of AI A Robotics Perspective Wolfram Burgard Autonomous Intelligent Systems Department of Computer Science University of Freiburg Germany The Future of AI My Robotics Perspective Wolfram Burgard
Digital Photography and Geometry Capture. NBAY 6120 March 8, 2018 Donald P. Greenberg Lecture 3
 Digital Photography and Geometry Capture NBAY 6120 March 8, 2018 Donald P. Greenberg Lecture 3 Required Reading N. Snavely, S.M. Seitz, and R. Szeliski, Photo Tourism: Exploring Photo Collections in 3D,
Digital Photography and Geometry Capture NBAY 6120 March 8, 2018 Donald P. Greenberg Lecture 3 Required Reading N. Snavely, S.M. Seitz, and R. Szeliski, Photo Tourism: Exploring Photo Collections in 3D,
Single-view Metrology and Cameras
 Single-view Metrology and Cameras 10/10/17 Computational Photography Derek Hoiem, University of Illinois Project 2 Results Incomplete list of great project pages Haohang Huang: Best presented project;
Single-view Metrology and Cameras 10/10/17 Computational Photography Derek Hoiem, University of Illinois Project 2 Results Incomplete list of great project pages Haohang Huang: Best presented project;
6.869 Advances in Computer Vision Spring 2010, A. Torralba
 6.869 Advances in Computer Vision Spring 2010, A. Torralba Due date: Wednesday, Feb 17, 2010 Problem set 1 You need to submit a report with brief descriptions of what you did. The most important part is
6.869 Advances in Computer Vision Spring 2010, A. Torralba Due date: Wednesday, Feb 17, 2010 Problem set 1 You need to submit a report with brief descriptions of what you did. The most important part is
Visually Guided Errand Service for Home Robot
 ICRA 2007 Dec. 18, 2006 Visually Guided Errand Service for Home Robot Sukhan Lee Professor and Director Where I am from Current Status and Future Prospect on Service Robotics Operational industrial robots
ICRA 2007 Dec. 18, 2006 Visually Guided Errand Service for Home Robot Sukhan Lee Professor and Director Where I am from Current Status and Future Prospect on Service Robotics Operational industrial robots
Paintings, photographs, and computer graphics are calculated appearances
 This is a preprint of 8291-36 paper in SPIE/IS&T Electronic Imaging Meeting, San Jose, January, 2012 Paintings, photographs, and computer graphics are calculated appearances John J. McCann McCann Imaging,
This is a preprint of 8291-36 paper in SPIE/IS&T Electronic Imaging Meeting, San Jose, January, 2012 Paintings, photographs, and computer graphics are calculated appearances John J. McCann McCann Imaging,
Telling What-Is-What in Video. Gerard Medioni
 Telling What-Is-What in Video Gerard Medioni medioni@usc.edu 1 Tracking Essential problem Establishes correspondences between elements in successive frames Basic problem easy 2 Many issues One target (pursuit)
Telling What-Is-What in Video Gerard Medioni medioni@usc.edu 1 Tracking Essential problem Establishes correspondences between elements in successive frames Basic problem easy 2 Many issues One target (pursuit)
The Application of Virtual Reality Technology to Digital Tourism Systems
 The Application of Virtual Reality Technology to Digital Tourism Systems PAN Li-xin 1, a 1 Geographic Information and Tourism College Chuzhou University, Chuzhou 239000, China a czplx@sina.com Abstract
The Application of Virtual Reality Technology to Digital Tourism Systems PAN Li-xin 1, a 1 Geographic Information and Tourism College Chuzhou University, Chuzhou 239000, China a czplx@sina.com Abstract
AUTOMATIC FACE COLOR ENHANCEMENT
 AUTOMATIC FACE COLOR ENHANCEMENT Da-Yuan Huang ( 黃大源 ), Chiou-Shan Fuh ( 傅楸善 ) Dept. of Computer Science and Information Engineering, National Taiwan University E-mail: r97022@cise.ntu.edu.tw ABSTRACT
AUTOMATIC FACE COLOR ENHANCEMENT Da-Yuan Huang ( 黃大源 ), Chiou-Shan Fuh ( 傅楸善 ) Dept. of Computer Science and Information Engineering, National Taiwan University E-mail: r97022@cise.ntu.edu.tw ABSTRACT
Recent Advances in Image Deblurring. Seungyong Lee (Collaboration w/ Sunghyun Cho)
") Recent Advances in Image Deblurring Seungyong Lee (Collaboration w/ Sunghyun Cho) Disclaimer Many images and figures in this course note have been copied from the papers and presentation materials of previous
Recent Advances in Image Deblurring Seungyong Lee (Collaboration w/ Sunghyun Cho) Disclaimer Many images and figures in this course note have been copied from the papers and presentation materials of previous
Book Cover Recognition Project
 Book Cover Recognition Project Carolina Galleguillos Department of Computer Science University of California San Diego La Jolla, CA 92093-0404 cgallegu@cs.ucsd.edu Abstract The purpose of this project
Book Cover Recognition Project Carolina Galleguillos Department of Computer Science University of California San Diego La Jolla, CA 92093-0404 cgallegu@cs.ucsd.edu Abstract The purpose of this project
Research Statement James Hays
 James Hays 1/5 Research Statement James Hays (jhhays@cs.cmu.edu) Abstract: My research interests span computer graphics, computer vision, and the emerging field of computational photography. My current
James Hays 1/5 Research Statement James Hays (jhhays@cs.cmu.edu) Abstract: My research interests span computer graphics, computer vision, and the emerging field of computational photography. My current
Today. Pattern Recognition. Introduction. Perceptual processing. Feature Integration Theory, cont d. Feature Integration Theory (FIT)
") Today Pattern Recognition Intro Psychology Georgia Tech Instructor: Dr. Bruce Walker Turning features into things Patterns Constancy Depth Illusions Introduction We have focused on the detection of features
Today Pattern Recognition Intro Psychology Georgia Tech Instructor: Dr. Bruce Walker Turning features into things Patterns Constancy Depth Illusions Introduction We have focused on the detection of features
Dappled Photography: Mask Enhanced Cameras for Heterodyned Light Fields and Coded Aperture Refocusing
 Dappled Photography: Mask Enhanced Cameras for Heterodyned Light Fields and Coded Aperture Refocusing Ashok Veeraraghavan, Ramesh Raskar, Ankit Mohan & Jack Tumblin Amit Agrawal, Mitsubishi Electric Research
Dappled Photography: Mask Enhanced Cameras for Heterodyned Light Fields and Coded Aperture Refocusing Ashok Veeraraghavan, Ramesh Raskar, Ankit Mohan & Jack Tumblin Amit Agrawal, Mitsubishi Electric Research
ROAD RECOGNITION USING FULLY CONVOLUTIONAL NEURAL NETWORKS
 Bulletin of the Transilvania University of Braşov Vol. 10 (59) No. 2-2017 Series I: Engineering Sciences ROAD RECOGNITION USING FULLY CONVOLUTIONAL NEURAL NETWORKS E. HORVÁTH 1 C. POZNA 2 Á. BALLAGI 3
Bulletin of the Transilvania University of Braşov Vol. 10 (59) No. 2-2017 Series I: Engineering Sciences ROAD RECOGNITION USING FULLY CONVOLUTIONAL NEURAL NETWORKS E. HORVÁTH 1 C. POZNA 2 Á. BALLAGI 3
Coding and Modulation in Cameras
 Coding and Modulation in Cameras Amit Agrawal June 2010 Mitsubishi Electric Research Labs (MERL) Cambridge, MA, USA Coded Computational Imaging Agrawal, Veeraraghavan, Narasimhan & Mohan Schedule Introduction
Coding and Modulation in Cameras Amit Agrawal June 2010 Mitsubishi Electric Research Labs (MERL) Cambridge, MA, USA Coded Computational Imaging Agrawal, Veeraraghavan, Narasimhan & Mohan Schedule Introduction
MARCO PEDERSOLI. Assistant Professor at ETS Montreal profs.etsmtl.ca/mpedersoli
 MARCO PEDERSOLI Assistant Professor at ETS Montreal profs.etsmtl.ca/mpedersoli RESEARCH INTERESTS Visual Recognition, Efficient Deep Learning, Learning with Reduced Supervision, Data Exploration ACADEMIC
MARCO PEDERSOLI Assistant Professor at ETS Montreal profs.etsmtl.ca/mpedersoli RESEARCH INTERESTS Visual Recognition, Efficient Deep Learning, Learning with Reduced Supervision, Data Exploration ACADEMIC
Mobile Cognitive Indoor Assistive Navigation for the Visually Impaired
 1 Mobile Cognitive Indoor Assistive Navigation for the Visually Impaired Bing Li 1, Manjekar Budhai 2, Bowen Xiao 3, Liang Yang 1, Jizhong Xiao 1 1 Department of Electrical Engineering, The City College,
1 Mobile Cognitive Indoor Assistive Navigation for the Visually Impaired Bing Li 1, Manjekar Budhai 2, Bowen Xiao 3, Liang Yang 1, Jizhong Xiao 1 1 Department of Electrical Engineering, The City College,
Perception. Read: AIMA Chapter 24 & Chapter HW#8 due today. Vision
 11-25-2013 Perception Vision Read: AIMA Chapter 24 & Chapter 25.3 HW#8 due today visual aural haptic & tactile vestibular (balance: equilibrium, acceleration, and orientation wrt gravity) olfactory taste
11-25-2013 Perception Vision Read: AIMA Chapter 24 & Chapter 25.3 HW#8 due today visual aural haptic & tactile vestibular (balance: equilibrium, acceleration, and orientation wrt gravity) olfactory taste
Virtual Reality. NBAY 6120 April 4, 2016 Donald P. Greenberg Lecture 9
 Virtual Reality NBAY 6120 April 4, 2016 Donald P. Greenberg Lecture 9 Virtual Reality A term used to describe a digitally-generated environment which can simulate the perception of PRESENCE. Note that
Virtual Reality NBAY 6120 April 4, 2016 Donald P. Greenberg Lecture 9 Virtual Reality A term used to describe a digitally-generated environment which can simulate the perception of PRESENCE. Note that
Motion illusion, rotating snakes
 Motion illusion, rotating snakes Image Filtering 9/4/2 Computer Vision James Hays, Brown Graphic: unsharp mask Many slides by Derek Hoiem Next three classes: three views of filtering Image filters in spatial
Motion illusion, rotating snakes Image Filtering 9/4/2 Computer Vision James Hays, Brown Graphic: unsharp mask Many slides by Derek Hoiem Next three classes: three views of filtering Image filters in spatial