Ant? Bird? Dog? Human -SURE
|
|
|
- Avis Todd
- 6 years ago
- Views:
Transcription
1 ECE 172A: Intelligent Systems: Introduction Week 1 (October 1, 2007): Course Introduction and Announcements Intelligent Robots as Intelligent Systems A systems perspective of Intelligent Robots and capabilities Architecture and modules Examples of Computer Vision systems and Intelligent Robotics. ECE 172A: Intelligent Systems: Introduction Intelligent Systems = Intelligent + Systems Need to understand what these terms mean. Examples of Intelligent Systems: Ant? Bird? Dog? Human -SURE Intelligent Systems: Introduction Noun 1. artificial intelligence - the branch of computer science that deal with writing computer programs that can solve problems creatively; "workers in AI hope to imitate or duplicate intelligence in computers and robots" Synonyms: AI Artificial intelligence, also known as machine intelligence, is defined as intelligence exhibited by anything manufactured (i.e. artificial) It is usually hypothetically applied to general-purpose computers. The term is also used to refer to the field of scientific investigation into the plausibility of and approaches to creating such systems. 1
2 Intelligent Systems: Introduction Intelligent Systems: Introduction Intelligent Systems: Introduction Artificial intelligence includes Games playing: programming computers to play games such as chess and checkers Expert systems: programming computers to make decisions in real-life situations (for example, some expert systems help doctors diagnose diseases based on symptoms) Natural language: programming computers to understand natural human languages Robotics: programming computers to see and hear and react to other sensory stimuli In practical usage, a robot is a mechanical device which performs automated tasks, either according to direct human supervision, a pre-defined program or, a set of general guidelines, using [artificial intelligence] techniques. These tasks either replace or enhance human work, such as in manufacturing, construction or manipulation of heavy or hazardous materials. A robot may include a feedback-driven connection between sense and action, not under direct human control. The action may take the form of electro-magnetic motors or actuators that move an arm, open and close grips, or propel the robot. The step by step control and feedback is provided by a computer program run on either an external or embedded computer or a microcontroller. By this definition, a robot may include nearly all automated devices. Perception Vision System Intelligent Systems Intelligent Robots Planning/ Control Motor Learning 2
3 Intelligent Systems: Introduction ECE 172A: Intelligent Systems: Introduction Intelligent Systems: Introduction Evolution of Robots: Pre 1970: Robots as novelty, specialized toys, teleoperation 1970: Preprogrammed robots Sensor-based intelligent robots Cooperative robots, virtual and real robots Intelligent environments, Sociable robots Week 1 (October 3, 2007): Course Introduction and Announcements Intelligent Robots as Intelligent Systems A systems perspective of Intelligent Robots and capabilities Architecture and modules What is a robot? ( ) It is a multipurpose device or a manipulator which (can be programmed to) perform a variety of tasks ( ) Robot can be viewed as the Physical link between intelligence and Action. Examples of Computer Vision systems and Intelligent Robotics. Assignments (Reading, Viewing and Comments): Intelligence Robot Action Sensor-Based Intelligent Robots (IEEE Trans. SMC 95 Paper) Intelligent Environments (IEEE Trans SMC 05 paper) 3

4 Sensor-based Intelligent Robots Intelligent Systems: Introduction Intelligent Systems: Introduction Sensing Perception, Planning and Control Action Sensors Mechanical Devices Effectors Work Environment 4

5 Intelligent Environments DIVA for Tracking, Identification and Activity Analysis Intelligent Meeting Room: Interactions Space Awareness (Static) Environmental Awareness Activity Awareness (Dynamic) Key Features: Apply different types of camera arrays to provide multiple signal-level resolutions. Types of interactions: between active participants people present in the room Intelligent Environments can: Develop and maintain awareness of events Adapt to the dynamic changes in their surroundings Interact in a natural, efficient and flexible manner with the users Televiewing Summarization and Recall Ability to derive semantic information at multiple levels of abstraction. Ability to be "attentive" to specific events and activities. Ability to actively shift the focus of attention at different "semantic" resolutions. between the Room and remote participants between the Room and future participants 5
 CVRR 1994 Clips (integrated sensing, planning, mobility, Cooperating robots) AVIARY 2000 (Intelligent Environments) Mobile Video Probes 1998")
: Sensor-Based Intelligent Robots (IEEE Trans.")
6 Intelligent Spaces: Indoor Intelligent Robots and Vision Systems: Video Demos/Samplings ECE 172A: Intelligent Systems: Introduction AVIARY: Audio-Video Interactive Appliances, Rooms, and systems IEEE Compusat-88 (introducing sensor-based robots) CVRR 1994 Clips (integrated sensing, planning, mobility, Cooperating robots) AVIARY 2000 (Intelligent Environments) Mobile Video Probes 1998 (Human-machine Cooperation) Androids 2006 Week 1 (October 3, 2007): Course Introduction and Announcements Intelligent Robots as Intelligent Systems A systems perspective of Intelligent Robots and capabilities Architecture and modules Examples of Computer Vision systems and Intelligent Robotics. Assignments (Reading, Viewing and Comments): Sensor-Based Intelligent Robots (IEEE Trans. SMC 95 Paper) Intelligent Environments (IEEE Trans SMC 05 paper) 6
7 Intelligent Systems: Introduction Intelligent Systems Intelligent Systems: Levels of Autonomy Intelligent Systems: Example of Autonomous Robot Intelligent Robots Manual Full Autonomy Perception Planning/ Control Motor Learning Level of Autonomy needs to be properly selected for all four key elements of an I.S.: Perception Vision System Types of Intelligent Systems: Biological (Human) Planning Action Artificial Learning How about hybrid? 7
 Image Processing, 2) Pattern Recognition 3) Computer")
8 Computer Vision: Introduction Outline (October 10, 2007): What is computer vision? Relationship with sister disciplines: Computer Vision: Introduction Computer Vision: Introduction Computer Vision and sister disciplines: 1) Image Processing, 2) Pattern Recognition 3) Computer Graphics What is role of computer vision in Intelligent Systems? What are Computer Vision Systems good for? MRI fmri Input: Image Image Processing Applications: Output: Image Examples of Computer Vision systems for Intelligent Environments. Reading Assignment: Chapter 1 and 2 (Text book) Encyclopedia Article (Class web) Image Processing Image Enhancement Noise Filtering Image Compression 8


9 Computer Vision: Introduction Computer Vision: Introduction Computer Vision: Introduction Computer Vision and sister disciplines: Computer Vision and sister disciplines: Computer Vision and sister disciplines: Input: Image Image Processing Output: Image Input: Image Image Processing Output: Image Input: Measurement Vector Pattern Recognition Output: Classified Vectors Applications: Image Enhancement Noise Filtering Image Compression Not an Image Can be calculated from Image Properties Examples: Male/Female Biomedical Land-use classification Face Recognition 9
10 Computer Vision: Introduction Computer Vision Examples: Intelligent Robotics Multiple Abstractions Computer Vision and sister disciplines: Simultaneous 3D tracking of multiple blobs Face recognition Capture of interesting events Localization of the Panel corner lights Input: 1. Image Derived Measurements 2. Models : Prior knowledge about Imaging, Application Domain, and other useful information Computer Vision Examples: Object Recognition Face recognition Lane detection Activity analysis Output: Recognition of Objects and Events embedded in Images and Video ( Semantic level Classification) Meter Reading Spill detection Spill Localization Tool Detection and Localization Spill clean-up Verification.. Mohan Trivedi Face orientation estimation Kohsia Huang Affect Analysis IMR Video 10
11 Computer Vision in Intelligent Vehicles Computer Vision in Intelligent Transportation Systems Computer Vision: Introduction Computer Vision and sister disciplines: Looking Out: Looking In: Traffic Flow Vehicle in Front Occupant Position and Posture Traffic Types, Vehicle Classification Input: Output: Obstacles, Lanes and Guard Rails Pedestrains Driver Head Pose Driver Eye Gaze Driver Body Pose and Gestures Lane utilization and Efficiency Incidents Pedestrian Crossings Mathematical Model of Objects and Events Computer Graphics Images ( synthesized ) Road Signs Infrastructure Health and Safety Examples: Public Safety Driving Simulation Virtual Tours Video Games Animated Models for Education 11

12 Computer Computer Vision: Graphics Introduction Computer Vision: Introduction Computer Vision: Introduction Computer Vision and sister disciplines: Input: Computer Vision and sister disciplines: Vision is Signal to Symbol Transformation Examples: Driving Simulation Virtual Tours Video Games Animated Models for Education 1. Image Derived Measurements 2. Models : Prior knowledge about Imaging, Application Domain, and other useful information Computer Vision Examples: Object Recognition Face recognition Lane detection Activity analysis Output: Recognition of Objects and Events embedded in Images and Video ( Semantic level Classification) Input: Signals Vision Examples: Object Recognition Face recognition Lane detection Activity analysis Output: Symbols 12

13 Computer Vision: Introduction Vision in Man Vision in Man: Philosophers Science and Engineering of Vision Visual Arts, Philosophy Anatomy, Ophthalmology Neuroscience When the perturbations of the psychic nature have all been stilled, then the consciousness, like a pure crystal, takes the colour of what it rests on, whether that be the perceiver, perceiving, or the thing perceived. When the consciousness, poised in perceiving, blends together the name, the object dwelt on and the idea, this is perception with exterior consideration. When the object dwells in the mind, clear of memory-pictures, uncoloured by the mind, as a pure luminous idea, this is perception without exterior or consideration. Patanjali Perceptual Psychology Cognitive Science Computer Science and Engineering 13





14 Computer Vision: Introduction Computer Vision: Introduction Vision and Visual Arts Dancing Shiva in the cave temple, Badami Marcel Duchamp, 1912 Photo: Gjon Mili 14







15 Visual Arts: How to make Waldo pop-out? Contrast, Texture Anatomy, Ophthalmology Neuroscience and Vision Size Orientation Color,Motion
16 Vision: Perceptual Psychology Perception: Gestalt Principles Search and Discrimination Perception, especially Pre-attentive is governed by Gestalt Principles. Important Gestalt Principles include: Proximity Similarity Uniformity or homogeneity Closure Good Continuation 16



17 Integrated Testbed for Eye Movement Studies (ITEMS) A Framework for Perceptual Experiments A Psychophysical Experiment using ITEMS 17


18 Project Chameleon: Texture Synthesis Computer Vision: Introduction Outline (October 15, 2007): Computer Vision: Introduction Science and Engineering of Vision Systematic Approach to Building Computer Vision Systems Computational Hierarchy of Vision Visual Arts, Philosophy Anatomy, Ophthalmology Neuroscience Model-Based Vision Low-, Mid-(intermediate), and High- Level Vision Active Vision Image Capture and Cameras (Chapter 2 Gonzalez and Wintz) Perceptual Psychology Cognitive Science Computer Science and Engineering Anthony Copeland and Mohan Trivedi, Computational Models for Search and Discrimination, Optical Engineering, Sept


 Model Based Grouping")

19 Computer Vision: Introduction Vision is Signal to Symbol Transformation What is Perception? To see an object in the world we must see it as something (L. Wittegenstein) Model Based Grouping Input: Signals Vision Output: Symbols Examples: Object Recognition Face recognition Lane detection Activity analysis 19
20 Abstraction Hierarchy in Vision Perception: Gestalt Principles Computational Vision Hierarchy Symbols Objects and Events Perception, especially Pre-attentive is governed by Gestalt Principles. Models Relational Structure Analysis, Matching, Object/Event Recognition Scene Interpretation High-Level Processing Important Gestalt Principles include: Proximity Image Analysis: 3D Feature Detection (including Depth and Motion Analysis) Intermediate (mid) Level Processing Preattentive Cues Contrast, Segments, Color, Texture. Depth, Motion Similarity Uniformity or homogeneity Closure Good Continuation Image Processing (including Enhancement, coding, filtering tasks) and 2-D Feature Detection and Analysis (including edge/region/contour analysis, segmentation) Low Level Processing Images and Image Streams Signals 3 D, Dynamic Scene 20

21 Two Stage Processing in Vision and Active Vision Active Vision: Sensor-Motor Integration Active Vision: Sensor-Motor Integration Stage 2: Top-Down Typically Serial Memory Object Detection Event Detection Learning Planning/ Control Preattentive Cues: Contrast, Color, Texture, Depth, Motion Attentive Processes Feedback Control Focus of attention Where to look? How to look? Perception Motor Stage 1: Bottom-up Typically Parallel Pre-attentive Processes Sensing Feature Detection Segmentation Figure-ground Separation 21


22 Active Vision: Sensor-Motor Integration Active Vision: Sensor-Motor Integration 2-D Image and 3-D World Physical and geometric processes that govern (digital) imaging P is the projection of P 3-D World 2-D Image Plane 22
: Image Representation (Chapter 2 Gonzalez and Woods) Low Level Vision Image Processing (Chapter 3 Textbook) Spatial and Transform")
23 A Digital Camera: IP System Computer Vision: Introduction How Cameras Produce Images? Camera Digitizer Computer DISPLAY Outline (October 17, 2007): Image Representation (Chapter 2 Gonzalez and Woods) Low Level Vision Image Processing (Chapter 3 Textbook) Spatial and Transform (Frequency) Domains Image Enhancement Image Restoration Spatial Domain: Point, Region, Histogram Based Approaches Frequency Domain Approaches Examples of Image Processing Basic Process: Light (photons) hit a detector Detector is charged Amount of charge is read as brightness Analog Signal Digital Signal 23






24 How Cameras Produce Images? 1975 Birth of a Digital Camera Digital Cameras Steven Sasoon and 8 lb, 0.01 MB Camera 24


25 How Cameras Produce Images? How Cameras Produce Images? Imaging Sensor Technologies 25

 lower sensitivity, lower power can be individually addressed Digital Discrete : consisting of distinct or")
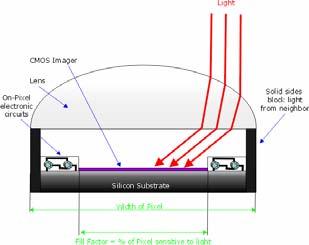
26 Imaging Sensor Technologies How Cameras Produce Images? What is a Digital Picture? Basic process: photons hit a detector the detector becomes charged the charge is read out as brightness Sensor types: CCD (charge-coupled device) most common high sensitivity high power CMOS cannot be individually addressed blooming simple to fabricate (cheap) lower sensitivity, lower power can be individually addressed Digital Discrete : consisting of distinct or unconnected elements 26
27 Digital Picture Digital Picture Digital Image: Matrix and Picture Function Pixel Binary 1 bit Grey 1 byte Color 3 bytes Each pixel is a measure of the brightness (intensity of light) that falls on an area of an sensor (typically a CCD chip) 27

28 Digital Image: Matrix and Picture Function Digital Image: Matrix and Picture Function Digital Image: Matrix and Picture Function 28



29 Sampling and Quantization Digital Image: Matrix and Picture Function Digital Image 29



30 Digital Image Digital Image: Spatial Resolution Effects Digital Image: Quantization Effects 30

31 Digital Image: Quantization Effects Digital Image: Connectivity Digital Image: Neighborhood 31
32 Frames are acquired at 30Hz (NTSC) Image Streams or Sequences--Video Frames Frames are composed of two fields consisting of the even and odd rows of a frame Binary 1 bit * 640x480 * 30 = 9.2 Mbits/second Grey 1 byte * 640x480 * 30 = 9.2 Mbytes/second Color 3 bytes * 640x480 * 30 = 27.6 Mbytes/second (actually about 37 mbytes/sec) Typical operation: 3x3 convolution 9 multiplies + 9 adds 180 Mflops Today s PC s are capable of processing images at frame rate Two Domains: Spatial and Transform Images can be processed and analyzed in two different domains: 1) Spatial Domain: Image processing is accomplished directly in the Spatial (X,Y,Z, and T) domain. 2) Transform Frequency Domain: In this, images are transformed from the original spatial domain to some other domain, and properties of images are examined and processed this domain. Once the processing is done, the images are converted back in the spatial domain. 32
: Low Level Vision Image Processing (Chapters 3 Textbook; Examples from Gonzalez and Woods website) Motivations for")

33 Visualizing Spatial Frequency in Images Visualizing Spatial Frequency in Images Computer Vision Systems Outline (October 29, 2007): Low Level Vision Image Processing (Chapters 3 Textbook; Examples from Gonzalez and Woods website) Motivations for Enhancement and Restoration: Degradation and Noise Image Enhancement Image Restoration Spatial Domain: Point, Region, Histogram Based Approaches Also, The Hypermedia Image Processing Reference from University of Edinburgh: 33
Prof Trivedi ECE253A Notes for Students only
 ECE 253A: Digital Processing: Course Related Class Website: https://sites.google.com/a/eng.ucsd.edu/ece253fall2017/ Course Graduate Assistants: Nachiket Deo Borhan Vasili Kirill Pirozenko Piazza Grading:
ECE 253A: Digital Processing: Course Related Class Website: https://sites.google.com/a/eng.ucsd.edu/ece253fall2017/ Course Graduate Assistants: Nachiket Deo Borhan Vasili Kirill Pirozenko Piazza Grading:
ROBOT VISION. Dr.M.Madhavi, MED, MVSREC
 ROBOT VISION Dr.M.Madhavi, MED, MVSREC Robotic vision may be defined as the process of acquiring and extracting information from images of 3-D world. Robotic vision is primarily targeted at manipulation
ROBOT VISION Dr.M.Madhavi, MED, MVSREC Robotic vision may be defined as the process of acquiring and extracting information from images of 3-D world. Robotic vision is primarily targeted at manipulation
SECTION I - CHAPTER 2 DIGITAL IMAGING PROCESSING CONCEPTS
 RADT 3463 - COMPUTERIZED IMAGING Section I: Chapter 2 RADT 3463 Computerized Imaging 1 SECTION I - CHAPTER 2 DIGITAL IMAGING PROCESSING CONCEPTS RADT 3463 COMPUTERIZED IMAGING Section I: Chapter 2 RADT
RADT 3463 - COMPUTERIZED IMAGING Section I: Chapter 2 RADT 3463 Computerized Imaging 1 SECTION I - CHAPTER 2 DIGITAL IMAGING PROCESSING CONCEPTS RADT 3463 COMPUTERIZED IMAGING Section I: Chapter 2 RADT
ECC419 IMAGE PROCESSING
 ECC419 IMAGE PROCESSING INTRODUCTION Image Processing Image processing is a subclass of signal processing concerned specifically with pictures. Digital Image Processing, process digital images by means
ECC419 IMAGE PROCESSING INTRODUCTION Image Processing Image processing is a subclass of signal processing concerned specifically with pictures. Digital Image Processing, process digital images by means
Digital image processing vs. computer vision Higher-level anchoring
 Digital image processing vs. computer vision Higher-level anchoring Václav Hlaváč Czech Technical University in Prague Faculty of Electrical Engineering, Department of Cybernetics Center for Machine Perception
Digital image processing vs. computer vision Higher-level anchoring Václav Hlaváč Czech Technical University in Prague Faculty of Electrical Engineering, Department of Cybernetics Center for Machine Perception
Image Extraction using Image Mining Technique
 IOSR Journal of Engineering (IOSRJEN) e-issn: 2250-3021, p-issn: 2278-8719 Vol. 3, Issue 9 (September. 2013), V2 PP 36-42 Image Extraction using Image Mining Technique Prof. Samir Kumar Bandyopadhyay,
IOSR Journal of Engineering (IOSRJEN) e-issn: 2250-3021, p-issn: 2278-8719 Vol. 3, Issue 9 (September. 2013), V2 PP 36-42 Image Extraction using Image Mining Technique Prof. Samir Kumar Bandyopadhyay,
EC-433 Digital Image Processing
 EC-433 Digital Image Processing Lecture 2 Digital Image Fundamentals Dr. Arslan Shaukat 1 Fundamental Steps in DIP Image Acquisition An image is captured by a sensor (such as a monochrome or color TV camera)
EC-433 Digital Image Processing Lecture 2 Digital Image Fundamentals Dr. Arslan Shaukat 1 Fundamental Steps in DIP Image Acquisition An image is captured by a sensor (such as a monochrome or color TV camera)
IMAGE PROCESSING PAPER PRESENTATION ON IMAGE PROCESSING
 IMAGE PROCESSING PAPER PRESENTATION ON IMAGE PROCESSING PRESENTED BY S PRADEEP K SUNIL KUMAR III BTECH-II SEM, III BTECH-II SEM, C.S.E. C.S.E. pradeep585singana@gmail.com sunilkumar5b9@gmail.com CONTACT:
IMAGE PROCESSING PAPER PRESENTATION ON IMAGE PROCESSING PRESENTED BY S PRADEEP K SUNIL KUMAR III BTECH-II SEM, III BTECH-II SEM, C.S.E. C.S.E. pradeep585singana@gmail.com sunilkumar5b9@gmail.com CONTACT:
Activity monitoring and summarization for an intelligent meeting room
 IEEE Workshop on Human Motion, Austin, Texas, December 2000 Activity monitoring and summarization for an intelligent meeting room Ivana Mikic, Kohsia Huang, Mohan Trivedi Computer Vision and Robotics Research
IEEE Workshop on Human Motion, Austin, Texas, December 2000 Activity monitoring and summarization for an intelligent meeting room Ivana Mikic, Kohsia Huang, Mohan Trivedi Computer Vision and Robotics Research
Perception. Introduction to HRI Simmons & Nourbakhsh Spring 2015
 Perception Introduction to HRI Simmons & Nourbakhsh Spring 2015 Perception my goals What is the state of the art boundary? Where might we be in 5-10 years? The Perceptual Pipeline The classical approach:
Perception Introduction to HRI Simmons & Nourbakhsh Spring 2015 Perception my goals What is the state of the art boundary? Where might we be in 5-10 years? The Perceptual Pipeline The classical approach:
DIGITAL IMAGE PROCESSING (COM-3371) Week 2 - January 14, 2002
 Week 2 - January 14, 2002") DIGITAL IMAGE PROCESSING (COM-3371) Week 2 - January 14, 22 Topics: Human eye Visual phenomena Simple image model Image enhancement Point processes Histogram Lookup tables Contrast compression and stretching
DIGITAL IMAGE PROCESSING (COM-3371) Week 2 - January 14, 22 Topics: Human eye Visual phenomena Simple image model Image enhancement Point processes Histogram Lookup tables Contrast compression and stretching
Human Vision and Human-Computer Interaction. Much content from Jeff Johnson, UI Wizards, Inc.
 Human Vision and Human-Computer Interaction Much content from Jeff Johnson, UI Wizards, Inc. are these guidelines grounded in perceptual psychology and how can we apply them intelligently? Mach bands:
Human Vision and Human-Computer Interaction Much content from Jeff Johnson, UI Wizards, Inc. are these guidelines grounded in perceptual psychology and how can we apply them intelligently? Mach bands:
NCCT IEEE PROJECTS ADVANCED ROBOTICS SOLUTIONS. Latest Projects, in various Domains. Promise for the Best Projects
 NCCT Promise for the Best Projects IEEE PROJECTS in various Domains Latest Projects, 2009-2010 ADVANCED ROBOTICS SOLUTIONS EMBEDDED SYSTEM PROJECTS Microcontrollers VLSI DSP Matlab Robotics ADVANCED ROBOTICS
NCCT Promise for the Best Projects IEEE PROJECTS in various Domains Latest Projects, 2009-2010 ADVANCED ROBOTICS SOLUTIONS EMBEDDED SYSTEM PROJECTS Microcontrollers VLSI DSP Matlab Robotics ADVANCED ROBOTICS
Live Hand Gesture Recognition using an Android Device
 Live Hand Gesture Recognition using an Android Device Mr. Yogesh B. Dongare Department of Computer Engineering. G.H.Raisoni College of Engineering and Management, Ahmednagar. Email- yogesh.dongare05@gmail.com
Live Hand Gesture Recognition using an Android Device Mr. Yogesh B. Dongare Department of Computer Engineering. G.H.Raisoni College of Engineering and Management, Ahmednagar. Email- yogesh.dongare05@gmail.com
Digital Photogrammetry. Presented by: Dr. Hamid Ebadi
 Digital Photogrammetry Presented by: Dr. Hamid Ebadi Background First Generation Analog Photogrammetry Analytical Photogrammetry Digital Photogrammetry Photogrammetric Generations 2000 digital photogrammetry
Digital Photogrammetry Presented by: Dr. Hamid Ebadi Background First Generation Analog Photogrammetry Analytical Photogrammetry Digital Photogrammetry Photogrammetric Generations 2000 digital photogrammetry
Images and Graphics. 4. Images and Graphics - Copyright Denis Hamelin - Ryerson University
 Images and Graphics Images and Graphics Graphics and images are non-textual information that can be displayed and printed. Graphics (vector graphics) are an assemblage of lines, curves or circles with
Images and Graphics Images and Graphics Graphics and images are non-textual information that can be displayed and printed. Graphics (vector graphics) are an assemblage of lines, curves or circles with
MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT
 MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT F. TIECHE, C. FACCHINETTI and H. HUGLI Institute of Microtechnology, University of Neuchâtel, Rue de Tivoli 28, CH-2003
MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT F. TIECHE, C. FACCHINETTI and H. HUGLI Institute of Microtechnology, University of Neuchâtel, Rue de Tivoli 28, CH-2003
Chapter 2 Introduction to Haptics 2.1 Definition of Haptics
 Chapter 2 Introduction to Haptics 2.1 Definition of Haptics The word haptic originates from the Greek verb hapto to touch and therefore refers to the ability to touch and manipulate objects. The haptic
Chapter 2 Introduction to Haptics 2.1 Definition of Haptics The word haptic originates from the Greek verb hapto to touch and therefore refers to the ability to touch and manipulate objects. The haptic
Introduction to DSP ECE-S352 Fall Quarter 2000 Matlab Project 1
 Objective: Introduction to DSP ECE-S352 Fall Quarter 2000 Matlab Project 1 This Matlab Project is an extension of the basic correlation theory presented in the course. It shows a practical application
Objective: Introduction to DSP ECE-S352 Fall Quarter 2000 Matlab Project 1 This Matlab Project is an extension of the basic correlation theory presented in the course. It shows a practical application
This list supersedes the one published in the November 2002 issue of CR.
 PERIODICALS RECEIVED This is the current list of periodicals received for review in Reviews. International standard serial numbers (ISSNs) are provided to facilitate obtaining copies of articles or subscriptions.
PERIODICALS RECEIVED This is the current list of periodicals received for review in Reviews. International standard serial numbers (ISSNs) are provided to facilitate obtaining copies of articles or subscriptions.
Introduction to AI. What is Artificial Intelligence?
 Introduction to AI Instructor: Dr. Wei Ding Fall 2009 1 What is Artificial Intelligence? Views of AI fall into four categories: Thinking Humanly Thinking Rationally Acting Humanly Acting Rationally The
Introduction to AI Instructor: Dr. Wei Ding Fall 2009 1 What is Artificial Intelligence? Views of AI fall into four categories: Thinking Humanly Thinking Rationally Acting Humanly Acting Rationally The
Behaviour-Based Control. IAR Lecture 5 Barbara Webb
 Behaviour-Based Control IAR Lecture 5 Barbara Webb Traditional sense-plan-act approach suggests a vertical (serial) task decomposition Sensors Actuators perception modelling planning task execution motor
Behaviour-Based Control IAR Lecture 5 Barbara Webb Traditional sense-plan-act approach suggests a vertical (serial) task decomposition Sensors Actuators perception modelling planning task execution motor
Humanoid robot. Honda's ASIMO, an example of a humanoid robot
 Humanoid robot Honda's ASIMO, an example of a humanoid robot A humanoid robot is a robot with its overall appearance based on that of the human body, allowing interaction with made-for-human tools or environments.
Humanoid robot Honda's ASIMO, an example of a humanoid robot A humanoid robot is a robot with its overall appearance based on that of the human body, allowing interaction with made-for-human tools or environments.
* Intelli Robotic Wheel Chair for Specialty Operations & Physically Challenged
 ADVANCED ROBOTICS SOLUTIONS * Intelli Mobile Robot for Multi Specialty Operations * Advanced Robotic Pick and Place Arm and Hand System * Automatic Color Sensing Robot using PC * AI Based Image Capturing
ADVANCED ROBOTICS SOLUTIONS * Intelli Mobile Robot for Multi Specialty Operations * Advanced Robotic Pick and Place Arm and Hand System * Automatic Color Sensing Robot using PC * AI Based Image Capturing
Perception. Read: AIMA Chapter 24 & Chapter HW#8 due today. Vision
 11-25-2013 Perception Vision Read: AIMA Chapter 24 & Chapter 25.3 HW#8 due today visual aural haptic & tactile vestibular (balance: equilibrium, acceleration, and orientation wrt gravity) olfactory taste
11-25-2013 Perception Vision Read: AIMA Chapter 24 & Chapter 25.3 HW#8 due today visual aural haptic & tactile vestibular (balance: equilibrium, acceleration, and orientation wrt gravity) olfactory taste
APPLICATION OF COMPUTER VISION FOR DETERMINATION OF SYMMETRICAL OBJECT POSITION IN THREE DIMENSIONAL SPACE
 APPLICATION OF COMPUTER VISION FOR DETERMINATION OF SYMMETRICAL OBJECT POSITION IN THREE DIMENSIONAL SPACE Najirah Umar 1 1 Jurusan Teknik Informatika, STMIK Handayani Makassar Email : najirah_stmikh@yahoo.com
APPLICATION OF COMPUTER VISION FOR DETERMINATION OF SYMMETRICAL OBJECT POSITION IN THREE DIMENSIONAL SPACE Najirah Umar 1 1 Jurusan Teknik Informatika, STMIK Handayani Makassar Email : najirah_stmikh@yahoo.com
Chapter 12 Image Processing
 Chapter 12 Image Processing The distance sensor on your self-driving car detects an object 100 m in front of your car. Are you following the car in front of you at a safe distance or has a pedestrian jumped
Chapter 12 Image Processing The distance sensor on your self-driving car detects an object 100 m in front of your car. Are you following the car in front of you at a safe distance or has a pedestrian jumped
PRACTICAL IMAGE AND VIDEO PROCESSING USING MATLAB
 PRACTICAL IMAGE AND VIDEO PROCESSING USING MATLAB OGE MARQUES Florida Atlantic University *IEEE IEEE PRESS WWILEY A JOHN WILEY & SONS, INC., PUBLICATION CONTENTS LIST OF FIGURES LIST OF TABLES FOREWORD
PRACTICAL IMAGE AND VIDEO PROCESSING USING MATLAB OGE MARQUES Florida Atlantic University *IEEE IEEE PRESS WWILEY A JOHN WILEY & SONS, INC., PUBLICATION CONTENTS LIST OF FIGURES LIST OF TABLES FOREWORD
CONTROLLING METHODS AND CHALLENGES OF ROBOTIC ARM
 CONTROLLING METHODS AND CHALLENGES OF ROBOTIC ARM Aniket D. Kulkarni *1, Dr.Sayyad Ajij D. *2 *1(Student of E&C Department, MIT Aurangabad, India) *2(HOD of E&C department, MIT Aurangabad, India) aniket2212@gmail.com*1,
CONTROLLING METHODS AND CHALLENGES OF ROBOTIC ARM Aniket D. Kulkarni *1, Dr.Sayyad Ajij D. *2 *1(Student of E&C Department, MIT Aurangabad, India) *2(HOD of E&C department, MIT Aurangabad, India) aniket2212@gmail.com*1,
from: Point Operations (Single Operands)
") from: http://www.khoral.com/contrib/contrib/dip2001 Point Operations (Single Operands) Histogram Equalization Histogram equalization is as a contrast enhancement technique with the objective to obtain
from: http://www.khoral.com/contrib/contrib/dip2001 Point Operations (Single Operands) Histogram Equalization Histogram equalization is as a contrast enhancement technique with the objective to obtain
E90 Project Proposal. 6 December 2006 Paul Azunre Thomas Murray David Wright
 E90 Project Proposal 6 December 2006 Paul Azunre Thomas Murray David Wright Table of Contents Abstract 3 Introduction..4 Technical Discussion...4 Tracking Input..4 Haptic Feedack.6 Project Implementation....7
E90 Project Proposal 6 December 2006 Paul Azunre Thomas Murray David Wright Table of Contents Abstract 3 Introduction..4 Technical Discussion...4 Tracking Input..4 Haptic Feedack.6 Project Implementation....7
ENHANCED HUMAN-AGENT INTERACTION: AUGMENTING INTERACTION MODELS WITH EMBODIED AGENTS BY SERAFIN BENTO. MASTER OF SCIENCE in INFORMATION SYSTEMS
 BY SERAFIN BENTO MASTER OF SCIENCE in INFORMATION SYSTEMS Edmonton, Alberta September, 2015 ABSTRACT The popularity of software agents demands for more comprehensive HAI design processes. The outcome of
BY SERAFIN BENTO MASTER OF SCIENCE in INFORMATION SYSTEMS Edmonton, Alberta September, 2015 ABSTRACT The popularity of software agents demands for more comprehensive HAI design processes. The outcome of
CS 376b Computer Vision
 CS 376b Computer Vision 09 / 03 / 2014 Instructor: Michael Eckmann Today s Topics This is technically a lab/discussion session, but I'll treat it as a lecture today. Introduction to the course layout,
CS 376b Computer Vision 09 / 03 / 2014 Instructor: Michael Eckmann Today s Topics This is technically a lab/discussion session, but I'll treat it as a lecture today. Introduction to the course layout,
ME 6406 MACHINE VISION. Georgia Institute of Technology
 ME 6406 MACHINE VISION Georgia Institute of Technology Class Information Instructor Professor Kok-Meng Lee MARC 474 Office hours: Tues/Thurs 1:00-2:00 pm kokmeng.lee@me.gatech.edu (404)-894-7402 Class
ME 6406 MACHINE VISION Georgia Institute of Technology Class Information Instructor Professor Kok-Meng Lee MARC 474 Office hours: Tues/Thurs 1:00-2:00 pm kokmeng.lee@me.gatech.edu (404)-894-7402 Class
Effective Iconography....convey ideas without words; attract attention...
 Effective Iconography...convey ideas without words; attract attention... Visual Thinking and Icons An icon is an image, picture, or symbol representing a concept Icon-specific guidelines Represent the
Effective Iconography...convey ideas without words; attract attention... Visual Thinking and Icons An icon is an image, picture, or symbol representing a concept Icon-specific guidelines Represent the
- Basics of informatics - Computer network - Software engineering - Intelligent media processing - Human interface. Professor. Professor.
 - Basics of informatics - Computer network - Software engineering - Intelligent media processing - Human interface Computer-Aided Engineering Research of power/signal integrity analysis and EMC design
- Basics of informatics - Computer network - Software engineering - Intelligent media processing - Human interface Computer-Aided Engineering Research of power/signal integrity analysis and EMC design
A Foveated Visual Tracking Chip
 TP 2.1: A Foveated Visual Tracking Chip Ralph Etienne-Cummings¹, ², Jan Van der Spiegel¹, ³, Paul Mueller¹, Mao-zhu Zhang¹ ¹Corticon Inc., Philadelphia, PA ²Department of Electrical Engineering, Southern
TP 2.1: A Foveated Visual Tracking Chip Ralph Etienne-Cummings¹, ², Jan Van der Spiegel¹, ³, Paul Mueller¹, Mao-zhu Zhang¹ ¹Corticon Inc., Philadelphia, PA ²Department of Electrical Engineering, Southern
Background. Computer Vision & Digital Image Processing. Improved Bartlane transmitted image. Example Bartlane transmitted image
 Background Computer Vision & Digital Image Processing Introduction to Digital Image Processing Interest comes from two primary backgrounds Improvement of pictorial information for human perception How
Background Computer Vision & Digital Image Processing Introduction to Digital Image Processing Interest comes from two primary backgrounds Improvement of pictorial information for human perception How
Gesture Recognition with Real World Environment using Kinect: A Review
 Gesture Recognition with Real World Environment using Kinect: A Review Prakash S. Sawai 1, Prof. V. K. Shandilya 2 P.G. Student, Department of Computer Science & Engineering, Sipna COET, Amravati, Maharashtra,
Gesture Recognition with Real World Environment using Kinect: A Review Prakash S. Sawai 1, Prof. V. K. Shandilya 2 P.G. Student, Department of Computer Science & Engineering, Sipna COET, Amravati, Maharashtra,
Driver Assistance for "Keeping Hands on the Wheel and Eyes on the Road"
 ICVES 2009 Driver Assistance for "Keeping Hands on the Wheel and Eyes on the Road" Cuong Tran and Mohan Manubhai Trivedi Laboratory for Intelligent and Safe Automobiles (LISA) University of California
ICVES 2009 Driver Assistance for "Keeping Hands on the Wheel and Eyes on the Road" Cuong Tran and Mohan Manubhai Trivedi Laboratory for Intelligent and Safe Automobiles (LISA) University of California
Neural Networks The New Moore s Law
 Neural Networks The New Moore s Law Chris Rowen, PhD, FIEEE CEO Cognite Ventures December 216 Outline Moore s Law Revisited: Efficiency Drives Productivity Embedded Neural Network Product Segments Efficiency
Neural Networks The New Moore s Law Chris Rowen, PhD, FIEEE CEO Cognite Ventures December 216 Outline Moore s Law Revisited: Efficiency Drives Productivity Embedded Neural Network Product Segments Efficiency
Digital Image Processing and Machine Vision Fundamentals
 Digital Image Processing and Machine Vision Fundamentals By Dr. Rajeev Srivastava Associate Professor Dept. of Computer Sc. & Engineering, IIT(BHU), Varanasi Overview In early days of computing, data was
Digital Image Processing and Machine Vision Fundamentals By Dr. Rajeev Srivastava Associate Professor Dept. of Computer Sc. & Engineering, IIT(BHU), Varanasi Overview In early days of computing, data was
On the WEB. Digital Image Processing ECE 178. B. S. MANJUNATH RM 3157 ENGR I Tel:
 Digital Image Processing ECE 178 B. S. MANJUNATH RM 3157 ENGR I Tel:893-7112 manj@ece.ucsb.edu http://vision.ece.ucsb.edu Introduction 1 On the WEB For course information: http://www.ece.ucsb.edu/~manj/ece178
Digital Image Processing ECE 178 B. S. MANJUNATH RM 3157 ENGR I Tel:893-7112 manj@ece.ucsb.edu http://vision.ece.ucsb.edu Introduction 1 On the WEB For course information: http://www.ece.ucsb.edu/~manj/ece178
OBJECTIVE OF THE BOOK ORGANIZATION OF THE BOOK
 xv Preface Advancement in technology leads to wide spread use of mounting cameras to capture video imagery. Such surveillance cameras are predominant in commercial institutions through recording the cameras
xv Preface Advancement in technology leads to wide spread use of mounting cameras to capture video imagery. Such surveillance cameras are predominant in commercial institutions through recording the cameras
Face Detection System on Ada boost Algorithm Using Haar Classifiers
 Vol.2, Issue.6, Nov-Dec. 2012 pp-3996-4000 ISSN: 2249-6645 Face Detection System on Ada boost Algorithm Using Haar Classifiers M. Gopi Krishna, A. Srinivasulu, Prof (Dr.) T.K.Basak 1, 2 Department of Electronics
Vol.2, Issue.6, Nov-Dec. 2012 pp-3996-4000 ISSN: 2249-6645 Face Detection System on Ada boost Algorithm Using Haar Classifiers M. Gopi Krishna, A. Srinivasulu, Prof (Dr.) T.K.Basak 1, 2 Department of Electronics
Engineering, & Mathematics
 8O260 Applied Mathematics for Technical Professionals (R) 1 credit Gr: 10-12 Prerequisite: Recommended prerequisites: Algebra I and Geometry Description: (SGHS only) Applied Mathematics for Technical Professionals
8O260 Applied Mathematics for Technical Professionals (R) 1 credit Gr: 10-12 Prerequisite: Recommended prerequisites: Algebra I and Geometry Description: (SGHS only) Applied Mathematics for Technical Professionals
MATLAB DIGITAL IMAGE/SIGNAL PROCESSING TITLES
 MATLAB DIGITAL IMAGE/SIGNAL PROCESSING TITLES -2018 S.NO PROJECT CODE 1 ITIMP01 2 ITIMP02 3 ITIMP03 4 ITIMP04 5 ITIMP05 6 ITIMP06 7 ITIMP07 8 ITIMP08 9 ITIMP09 `10 ITIMP10 11 ITIMP11 12 ITIMP12 13 ITIMP13
MATLAB DIGITAL IMAGE/SIGNAL PROCESSING TITLES -2018 S.NO PROJECT CODE 1 ITIMP01 2 ITIMP02 3 ITIMP03 4 ITIMP04 5 ITIMP05 6 ITIMP06 7 ITIMP07 8 ITIMP08 9 ITIMP09 `10 ITIMP10 11 ITIMP11 12 ITIMP12 13 ITIMP13
A SURVEY OF SOCIALLY INTERACTIVE ROBOTS
 A SURVEY OF SOCIALLY INTERACTIVE ROBOTS Terrence Fong, Illah Nourbakhsh, Kerstin Dautenhahn Presented By: Mehwish Alam INTRODUCTION History of Social Robots Social Robots Socially Interactive Robots Why
A SURVEY OF SOCIALLY INTERACTIVE ROBOTS Terrence Fong, Illah Nourbakhsh, Kerstin Dautenhahn Presented By: Mehwish Alam INTRODUCTION History of Social Robots Social Robots Socially Interactive Robots Why
Digital Imaging Rochester Institute of Technology
 Digital Imaging 1999 Rochester Institute of Technology So Far... camera AgX film processing image AgX photographic film captures image formed by the optical elements (lens). Unfortunately, the processing
Digital Imaging 1999 Rochester Institute of Technology So Far... camera AgX film processing image AgX photographic film captures image formed by the optical elements (lens). Unfortunately, the processing
Application Areas of AI Artificial intelligence is divided into different branches which are mentioned below:
 Week 2 - o Expert Systems o Natural Language Processing (NLP) o Computer Vision o Speech Recognition And Generation o Robotics o Neural Network o Virtual Reality APPLICATION AREAS OF ARTIFICIAL INTELLIGENCE
Week 2 - o Expert Systems o Natural Language Processing (NLP) o Computer Vision o Speech Recognition And Generation o Robotics o Neural Network o Virtual Reality APPLICATION AREAS OF ARTIFICIAL INTELLIGENCE
CMVision and Color Segmentation. CSE398/498 Robocup 19 Jan 05
 CMVision and Color Segmentation CSE398/498 Robocup 19 Jan 05 Announcements Please send me your time availability for working in the lab during the M-F, 8AM-8PM time period Why Color Segmentation? Computationally
CMVision and Color Segmentation CSE398/498 Robocup 19 Jan 05 Announcements Please send me your time availability for working in the lab during the M-F, 8AM-8PM time period Why Color Segmentation? Computationally
Extracting Navigation States from a Hand-Drawn Map
 Extracting Navigation States from a Hand-Drawn Map Marjorie Skubic, Pascal Matsakis, Benjamin Forrester and George Chronis Dept. of Computer Engineering and Computer Science, University of Missouri-Columbia,
Extracting Navigation States from a Hand-Drawn Map Marjorie Skubic, Pascal Matsakis, Benjamin Forrester and George Chronis Dept. of Computer Engineering and Computer Science, University of Missouri-Columbia,
Service Robots in an Intelligent House
 Service Robots in an Intelligent House Jesus Savage Bio-Robotics Laboratory biorobotics.fi-p.unam.mx School of Engineering Autonomous National University of Mexico UNAM 2017 OUTLINE Introduction A System
Service Robots in an Intelligent House Jesus Savage Bio-Robotics Laboratory biorobotics.fi-p.unam.mx School of Engineering Autonomous National University of Mexico UNAM 2017 OUTLINE Introduction A System
Funzionalità per la navigazione di robot mobili. Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo
 Funzionalità per la navigazione di robot mobili Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Variability of the Robotic Domain UNIBG - Corso di Robotica - Prof. Brugali Tourist
Funzionalità per la navigazione di robot mobili Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Variability of the Robotic Domain UNIBG - Corso di Robotica - Prof. Brugali Tourist
Plan for the 2nd hour. What is AI. Acting humanly: The Turing test. EDAF70: Applied Artificial Intelligence Agents (Chapter 2 of AIMA)
") Plan for the 2nd hour EDAF70: Applied Artificial Intelligence (Chapter 2 of AIMA) Jacek Malec Dept. of Computer Science, Lund University, Sweden January 17th, 2018 What is an agent? PEAS (Performance measure,
Plan for the 2nd hour EDAF70: Applied Artificial Intelligence (Chapter 2 of AIMA) Jacek Malec Dept. of Computer Science, Lund University, Sweden January 17th, 2018 What is an agent? PEAS (Performance measure,
15110 Principles of Computing, Carnegie Mellon University
 1 Last Time Data Compression Information and redundancy Huffman Codes ALOHA Fixed Width: 0001 0110 1001 0011 0001 20 bits Huffman Code: 10 0000 010 0001 10 15 bits 2 Overview Human sensory systems and
1 Last Time Data Compression Information and redundancy Huffman Codes ALOHA Fixed Width: 0001 0110 1001 0011 0001 20 bits Huffman Code: 10 0000 010 0001 10 15 bits 2 Overview Human sensory systems and
On-demand printable robots
 On-demand printable robots Ankur Mehta Computer Science and Artificial Intelligence Laboratory Massachusetts Institute of Technology 3 Computational problem? 4 Physical problem? There s a robot for that.
On-demand printable robots Ankur Mehta Computer Science and Artificial Intelligence Laboratory Massachusetts Institute of Technology 3 Computational problem? 4 Physical problem? There s a robot for that.
CS 730/830: Intro AI. Prof. Wheeler Ruml. TA Bence Cserna. Thinking inside the box. 5 handouts: course info, project info, schedule, slides, asst 1
 CS 730/830: Intro AI Prof. Wheeler Ruml TA Bence Cserna Thinking inside the box. 5 handouts: course info, project info, schedule, slides, asst 1 Wheeler Ruml (UNH) Lecture 1, CS 730 1 / 23 My Definition
CS 730/830: Intro AI Prof. Wheeler Ruml TA Bence Cserna Thinking inside the box. 5 handouts: course info, project info, schedule, slides, asst 1 Wheeler Ruml (UNH) Lecture 1, CS 730 1 / 23 My Definition
SUPER RESOLUTION INTRODUCTION
 SUPER RESOLUTION Jnanavardhini - Online MultiDisciplinary Research Journal Ms. Amalorpavam.G Assistant Professor, Department of Computer Sciences, Sambhram Academy of Management. Studies, Bangalore Abstract:-
SUPER RESOLUTION Jnanavardhini - Online MultiDisciplinary Research Journal Ms. Amalorpavam.G Assistant Professor, Department of Computer Sciences, Sambhram Academy of Management. Studies, Bangalore Abstract:-
Cvision 2. António J. R. Neves João Paulo Silva Cunha. Bernardo Cunha. IEETA / Universidade de Aveiro
 Cvision 2 Digital Imaging António J. R. Neves (an@ua.pt) & João Paulo Silva Cunha & Bernardo Cunha IEETA / Universidade de Aveiro Outline Image sensors Camera calibration Sampling and quantization Data
Cvision 2 Digital Imaging António J. R. Neves (an@ua.pt) & João Paulo Silva Cunha & Bernardo Cunha IEETA / Universidade de Aveiro Outline Image sensors Camera calibration Sampling and quantization Data
Digital Image Processing. Lecture 1 (Introduction) Bu-Ali Sina University Computer Engineering Dep. Fall 2011
 Bu-Ali Sina University Computer Engineering Dep. Fall 2011") Digital Processing Lecture 1 (Introduction) Bu-Ali Sina University Computer Engineering Dep. Fall 2011 Introduction One picture is worth more than ten thousand p words Outline Syllabus References Course
Digital Processing Lecture 1 (Introduction) Bu-Ali Sina University Computer Engineering Dep. Fall 2011 Introduction One picture is worth more than ten thousand p words Outline Syllabus References Course
Color Image Processing
 Color Image Processing Jesus J. Caban Outline Discuss Assignment #1 Project Proposal Color Perception & Analysis 1 Discuss Assignment #1 Project Proposal Due next Monday, Oct 4th Project proposal Submit
Color Image Processing Jesus J. Caban Outline Discuss Assignment #1 Project Proposal Color Perception & Analysis 1 Discuss Assignment #1 Project Proposal Due next Monday, Oct 4th Project proposal Submit
Distributed Vision System: A Perceptual Information Infrastructure for Robot Navigation
 Distributed Vision System: A Perceptual Information Infrastructure for Robot Navigation Hiroshi Ishiguro Department of Information Science, Kyoto University Sakyo-ku, Kyoto 606-01, Japan E-mail: ishiguro@kuis.kyoto-u.ac.jp
Distributed Vision System: A Perceptual Information Infrastructure for Robot Navigation Hiroshi Ishiguro Department of Information Science, Kyoto University Sakyo-ku, Kyoto 606-01, Japan E-mail: ishiguro@kuis.kyoto-u.ac.jp
Making Representations: From Sensation to Perception
 Making Representations: From Sensation to Perception Mary-Anne Williams Innovation and Enterprise Research Lab University of Technology, Sydney Australia Overview Understanding Cognition Understanding
Making Representations: From Sensation to Perception Mary-Anne Williams Innovation and Enterprise Research Lab University of Technology, Sydney Australia Overview Understanding Cognition Understanding
Introduction to More Advanced Steganography. John Ortiz. Crucial Security Inc. San Antonio
 Introduction to More Advanced Steganography John Ortiz Crucial Security Inc. San Antonio John.Ortiz@Harris.com 210 977-6615 11/17/2011 Advanced Steganography 1 Can YOU See the Difference? Which one of
Introduction to More Advanced Steganography John Ortiz Crucial Security Inc. San Antonio John.Ortiz@Harris.com 210 977-6615 11/17/2011 Advanced Steganography 1 Can YOU See the Difference? Which one of
Perception. What We Will Cover in This Section. Perception. How we interpret the information our senses receive. Overview Perception
 Perception 10/3/2002 Perception.ppt 1 What We Will Cover in This Section Overview Perception Visual perception. Organizing principles. 10/3/2002 Perception.ppt 2 Perception How we interpret the information
Perception 10/3/2002 Perception.ppt 1 What We Will Cover in This Section Overview Perception Visual perception. Organizing principles. 10/3/2002 Perception.ppt 2 Perception How we interpret the information
Mobile Cognitive Indoor Assistive Navigation for the Visually Impaired
 1 Mobile Cognitive Indoor Assistive Navigation for the Visually Impaired Bing Li 1, Manjekar Budhai 2, Bowen Xiao 3, Liang Yang 1, Jizhong Xiao 1 1 Department of Electrical Engineering, The City College,
1 Mobile Cognitive Indoor Assistive Navigation for the Visually Impaired Bing Li 1, Manjekar Budhai 2, Bowen Xiao 3, Liang Yang 1, Jizhong Xiao 1 1 Department of Electrical Engineering, The City College,
Vision Defect Identification System (VDIS) using Knowledge Base and Image Processing Framework
 using Knowledge Base and Image Processing Framework") Vishal Dahiya* et al. / (IJRCCT) INTERNATIONAL JOURNAL OF RESEARCH IN COMPUTER AND COMMUNICATION TECHNOLOGY Vol No. 1, Issue No. 1 Vision Defect Identification System (VDIS) using Knowledge Base and Image
Vishal Dahiya* et al. / (IJRCCT) INTERNATIONAL JOURNAL OF RESEARCH IN COMPUTER AND COMMUNICATION TECHNOLOGY Vol No. 1, Issue No. 1 Vision Defect Identification System (VDIS) using Knowledge Base and Image
Essay on A Survey of Socially Interactive Robots Authors: Terrence Fong, Illah Nourbakhsh, Kerstin Dautenhahn Summarized by: Mehwish Alam
 1 Introduction Essay on A Survey of Socially Interactive Robots Authors: Terrence Fong, Illah Nourbakhsh, Kerstin Dautenhahn Summarized by: Mehwish Alam 1.1 Social Robots: Definition: Social robots are
1 Introduction Essay on A Survey of Socially Interactive Robots Authors: Terrence Fong, Illah Nourbakhsh, Kerstin Dautenhahn Summarized by: Mehwish Alam 1.1 Social Robots: Definition: Social robots are
NON UNIFORM BACKGROUND REMOVAL FOR PARTICLE ANALYSIS BASED ON MORPHOLOGICAL STRUCTURING ELEMENT:
 IJCE January-June 2012, Volume 4, Number 1 pp. 59 67 NON UNIFORM BACKGROUND REMOVAL FOR PARTICLE ANALYSIS BASED ON MORPHOLOGICAL STRUCTURING ELEMENT: A COMPARATIVE STUDY Prabhdeep Singh1 & A. K. Garg2
IJCE January-June 2012, Volume 4, Number 1 pp. 59 67 NON UNIFORM BACKGROUND REMOVAL FOR PARTICLE ANALYSIS BASED ON MORPHOLOGICAL STRUCTURING ELEMENT: A COMPARATIVE STUDY Prabhdeep Singh1 & A. K. Garg2
Introduction to Video Forgery Detection: Part I
 Introduction to Video Forgery Detection: Part I Detecting Forgery From Static-Scene Video Based on Inconsistency in Noise Level Functions IEEE TRANSACTIONS ON INFORMATION FORENSICS AND SECURITY, VOL. 5,
Introduction to Video Forgery Detection: Part I Detecting Forgery From Static-Scene Video Based on Inconsistency in Noise Level Functions IEEE TRANSACTIONS ON INFORMATION FORENSICS AND SECURITY, VOL. 5,
Image and Video Processing
 Image and Video Processing () Image Representation Dr. Miles Hansard miles.hansard@qmul.ac.uk Segmentation 2 Today s agenda Digital image representation Sampling Quantization Sub-sampling Pixel interpolation
Image and Video Processing () Image Representation Dr. Miles Hansard miles.hansard@qmul.ac.uk Segmentation 2 Today s agenda Digital image representation Sampling Quantization Sub-sampling Pixel interpolation
Salient features make a search easy
 Chapter General discussion This thesis examined various aspects of haptic search. It consisted of three parts. In the first part, the saliency of movability and compliance were investigated. In the second
Chapter General discussion This thesis examined various aspects of haptic search. It consisted of three parts. In the first part, the saliency of movability and compliance were investigated. In the second
Putting It All Together: Computer Architecture and the Digital Camera
 461 Putting It All Together: Computer Architecture and the Digital Camera This book covers many topics in circuit analysis and design, so it is only natural to wonder how they all fit together and how
461 Putting It All Together: Computer Architecture and the Digital Camera This book covers many topics in circuit analysis and design, so it is only natural to wonder how they all fit together and how
Image Processing Based Vehicle Detection And Tracking System
 Image Processing Based Vehicle Detection And Tracking System Poonam A. Kandalkar 1, Gajanan P. Dhok 2 ME, Scholar, Electronics and Telecommunication Engineering, Sipna College of Engineering and Technology,
Image Processing Based Vehicle Detection And Tracking System Poonam A. Kandalkar 1, Gajanan P. Dhok 2 ME, Scholar, Electronics and Telecommunication Engineering, Sipna College of Engineering and Technology,
UNIVERSIDAD CARLOS III DE MADRID ESCUELA POLITÉCNICA SUPERIOR
 UNIVERSIDAD CARLOS III DE MADRID ESCUELA POLITÉCNICA SUPERIOR TRABAJO DE FIN DE GRADO GRADO EN INGENIERÍA DE SISTEMAS DE COMUNICACIONES CONTROL CENTRALIZADO DE FLOTAS DE ROBOTS CENTRALIZED CONTROL FOR
UNIVERSIDAD CARLOS III DE MADRID ESCUELA POLITÉCNICA SUPERIOR TRABAJO DE FIN DE GRADO GRADO EN INGENIERÍA DE SISTEMAS DE COMUNICACIONES CONTROL CENTRALIZADO DE FLOTAS DE ROBOTS CENTRALIZED CONTROL FOR
AI Application Processing Requirements
 AI Application Processing Requirements 1 Low Medium High Sensor analysis Activity Recognition (motion sensors) Stress Analysis or Attention Analysis Audio & sound Speech Recognition Object detection Computer
AI Application Processing Requirements 1 Low Medium High Sensor analysis Activity Recognition (motion sensors) Stress Analysis or Attention Analysis Audio & sound Speech Recognition Object detection Computer
EE631 Cooperating Autonomous Mobile Robots. Lecture 1: Introduction. Prof. Yi Guo ECE Department
 EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
Essential Understandings with Guiding Questions Robotics Engineering
 Essential Understandings with Guiding Questions Robotics Engineering 1 st Quarter Theme: Orientation to a Successful Laboratory Experience Student Expectations Safety Emergency MSDS Organizational Systems
Essential Understandings with Guiding Questions Robotics Engineering 1 st Quarter Theme: Orientation to a Successful Laboratory Experience Student Expectations Safety Emergency MSDS Organizational Systems
EXPERIMENTAL BILATERAL CONTROL TELEMANIPULATION USING A VIRTUAL EXOSKELETON
 EXPERIMENTAL BILATERAL CONTROL TELEMANIPULATION USING A VIRTUAL EXOSKELETON Josep Amat 1, Alícia Casals 2, Manel Frigola 2, Enric Martín 2 1Robotics Institute. (IRI) UPC / CSIC Llorens Artigas 4-6, 2a
EXPERIMENTAL BILATERAL CONTROL TELEMANIPULATION USING A VIRTUAL EXOSKELETON Josep Amat 1, Alícia Casals 2, Manel Frigola 2, Enric Martín 2 1Robotics Institute. (IRI) UPC / CSIC Llorens Artigas 4-6, 2a
VLSI Implementation of Impulse Noise Suppression in Images
 VLSI Implementation of Impulse Noise Suppression in Images T. Satyanarayana 1, A. Ravi Chandra 2 1 PG Student, VRS & YRN College of Engg. & Tech.(affiliated to JNTUK), Chirala 2 Assistant Professor, Department
VLSI Implementation of Impulse Noise Suppression in Images T. Satyanarayana 1, A. Ravi Chandra 2 1 PG Student, VRS & YRN College of Engg. & Tech.(affiliated to JNTUK), Chirala 2 Assistant Professor, Department
Last Time: Acting Humanly: The Full Turing Test
 Last Time: Acting Humanly: The Full Turing Test Alan Turing's 1950 article Computing Machinery and Intelligence discussed conditions for considering a machine to be intelligent Can machines think? Can
Last Time: Acting Humanly: The Full Turing Test Alan Turing's 1950 article Computing Machinery and Intelligence discussed conditions for considering a machine to be intelligent Can machines think? Can
Solution Q.1 What is a digital Image? Difference between Image Processing
 I Mid Term Test Subject: DIP Branch: CS Sem: VIII th Sem MM:10 Faculty Name: S.N.Tazi All Question Carry Equal Marks Q.1 What is a digital Image? Difference between Image Processing and Computer Graphics?
I Mid Term Test Subject: DIP Branch: CS Sem: VIII th Sem MM:10 Faculty Name: S.N.Tazi All Question Carry Equal Marks Q.1 What is a digital Image? Difference between Image Processing and Computer Graphics?
Agent. Pengju Ren. Institute of Artificial Intelligence and Robotics
 Agent Pengju Ren Institute of Artificial Intelligence and Robotics pengjuren@xjtu.edu.cn 1 Review: What is AI? Artificial intelligence (AI) is intelligence exhibited by machines. In computer science, the
Agent Pengju Ren Institute of Artificial Intelligence and Robotics pengjuren@xjtu.edu.cn 1 Review: What is AI? Artificial intelligence (AI) is intelligence exhibited by machines. In computer science, the
ADAS Development using Advanced Real-Time All-in-the-Loop Simulators. Roberto De Vecchi VI-grade Enrico Busto - AddFor
 ADAS Development using Advanced Real-Time All-in-the-Loop Simulators Roberto De Vecchi VI-grade Enrico Busto - AddFor The Scenario The introduction of ADAS and AV has created completely new challenges
ADAS Development using Advanced Real-Time All-in-the-Loop Simulators Roberto De Vecchi VI-grade Enrico Busto - AddFor The Scenario The introduction of ADAS and AV has created completely new challenges
INTERACTIVE SKETCHING OF THE URBAN-ARCHITECTURAL SPATIAL DRAFT Peter Kardoš Slovak University of Technology in Bratislava
 INTERACTIVE SKETCHING OF THE URBAN-ARCHITECTURAL SPATIAL DRAFT Peter Kardoš Slovak University of Technology in Bratislava Abstract The recent innovative information technologies and the new possibilities
INTERACTIVE SKETCHING OF THE URBAN-ARCHITECTURAL SPATIAL DRAFT Peter Kardoš Slovak University of Technology in Bratislava Abstract The recent innovative information technologies and the new possibilities
INTRODUCTION to ROBOTICS
 1 INTRODUCTION to ROBOTICS Robotics is a relatively young field of modern technology that crosses traditional engineering boundaries. Understanding the complexity of robots and their applications requires
1 INTRODUCTION to ROBOTICS Robotics is a relatively young field of modern technology that crosses traditional engineering boundaries. Understanding the complexity of robots and their applications requires
MIN-Fakultät Fachbereich Informatik. Universität Hamburg. Socially interactive robots. Christine Upadek. 29 November Christine Upadek 1
 Christine Upadek 29 November 2010 Christine Upadek 1 Outline Emotions Kismet - a sociable robot Outlook Christine Upadek 2 Denition Social robots are embodied agents that are part of a heterogeneous group:
Christine Upadek 29 November 2010 Christine Upadek 1 Outline Emotions Kismet - a sociable robot Outlook Christine Upadek 2 Denition Social robots are embodied agents that are part of a heterogeneous group:
Outline. Agents and environments Rationality PEAS (Performance measure, Environment, Actuators, Sensors) Environment types Agent types
 Environment types Agent types") Intelligent Agents Outline Agents and environments Rationality PEAS (Performance measure, Environment, Actuators, Sensors) Environment types Agent types Agents An agent is anything that can be viewed as
Intelligent Agents Outline Agents and environments Rationality PEAS (Performance measure, Environment, Actuators, Sensors) Environment types Agent types Agents An agent is anything that can be viewed as
Gesture Based Smart Home Automation System Using Real Time Inputs
 International Journal of Latest Research in Engineering and Technology (IJLRET) ISSN: 2454-5031 www.ijlret.com ǁ PP. 108-112 Gesture Based Smart Home Automation System Using Real Time Inputs Chinmaya H
International Journal of Latest Research in Engineering and Technology (IJLRET) ISSN: 2454-5031 www.ijlret.com ǁ PP. 108-112 Gesture Based Smart Home Automation System Using Real Time Inputs Chinmaya H
Evaluation of Connected Vehicle Technology for Concept Proposal Using V2X Testbed
 AUTOMOTIVE Evaluation of Connected Vehicle Technology for Concept Proposal Using V2X Testbed Yoshiaki HAYASHI*, Izumi MEMEZAWA, Takuji KANTOU, Shingo OHASHI, and Koichi TAKAYAMA ----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------
AUTOMOTIVE Evaluation of Connected Vehicle Technology for Concept Proposal Using V2X Testbed Yoshiaki HAYASHI*, Izumi MEMEZAWA, Takuji KANTOU, Shingo OHASHI, and Koichi TAKAYAMA ----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------
Keywords: Data Compression, Image Processing, Image Enhancement, Image Restoration, Image Rcognition.
 Volume 5, Issue 1, January 2015 ISSN: 2277 128X International Journal of Advanced Research in Computer Science and Software Engineering Research Paper Available online at: www.ijarcsse.com Scrutiny on
Volume 5, Issue 1, January 2015 ISSN: 2277 128X International Journal of Advanced Research in Computer Science and Software Engineering Research Paper Available online at: www.ijarcsse.com Scrutiny on
JEPPIAAR ENGINEERING COLLEGE
 JEPPIAAR ENGINEERING COLLEGE Jeppiaar Nagar, Rajiv Gandhi Salai 600 119 DEPARTMENT OFMECHANICAL ENGINEERING QUESTION BANK VII SEMESTER ME6010 ROBOTICS Regulation 013 JEPPIAAR ENGINEERING COLLEGE Jeppiaar
JEPPIAAR ENGINEERING COLLEGE Jeppiaar Nagar, Rajiv Gandhi Salai 600 119 DEPARTMENT OFMECHANICAL ENGINEERING QUESTION BANK VII SEMESTER ME6010 ROBOTICS Regulation 013 JEPPIAAR ENGINEERING COLLEGE Jeppiaar
Lecture 1: image display and representation
 Learning Objectives: General concepts of visual perception and continuous and discrete images Review concepts of sampling, convolution, spatial resolution, contrast resolution, and dynamic range through
Learning Objectives: General concepts of visual perception and continuous and discrete images Review concepts of sampling, convolution, spatial resolution, contrast resolution, and dynamic range through
Robotics Introduction Matteo Matteucci
 Robotics Introduction About me and my lectures 2 Lectures given by Matteo Matteucci +39 02 2399 3470 matteo.matteucci@polimi.it http://www.deib.polimi.it/ Research Topics Robotics and Autonomous Systems
Robotics Introduction About me and my lectures 2 Lectures given by Matteo Matteucci +39 02 2399 3470 matteo.matteucci@polimi.it http://www.deib.polimi.it/ Research Topics Robotics and Autonomous Systems
Cognitive robots and emotional intelligence Cloud robotics Ethical, legal and social issues of robotic Construction robots Human activities in many
 Preface The jubilee 25th International Conference on Robotics in Alpe-Adria-Danube Region, RAAD 2016 was held in the conference centre of the Best Western Hotel M, Belgrade, Serbia, from 30 June to 2 July
Preface The jubilee 25th International Conference on Robotics in Alpe-Adria-Danube Region, RAAD 2016 was held in the conference centre of the Best Western Hotel M, Belgrade, Serbia, from 30 June to 2 July
A Robust Neural Robot Navigation Using a Combination of Deliberative and Reactive Control Architectures
 A Robust Neural Robot Navigation Using a Combination of Deliberative and Reactive Control Architectures D.M. Rojas Castro, A. Revel and M. Ménard * Laboratory of Informatics, Image and Interaction (L3I)
A Robust Neural Robot Navigation Using a Combination of Deliberative and Reactive Control Architectures D.M. Rojas Castro, A. Revel and M. Ménard * Laboratory of Informatics, Image and Interaction (L3I)
Chapter 9 Image Compression Standards
 Chapter 9 Image Compression Standards 9.1 The JPEG Standard 9.2 The JPEG2000 Standard 9.3 The JPEG-LS Standard 1IT342 Image Compression Standards The image standard specifies the codec, which defines how
Chapter 9 Image Compression Standards 9.1 The JPEG Standard 9.2 The JPEG2000 Standard 9.3 The JPEG-LS Standard 1IT342 Image Compression Standards The image standard specifies the codec, which defines how
Artificial Intelligence and Mobile Robots: Successes and Challenges
 Artificial Intelligence and Mobile Robots: Successes and Challenges David Kortenkamp NASA Johnson Space Center Metrica Inc./TRACLabs Houton TX 77058 kortenkamp@jsc.nasa.gov http://www.traclabs.com/~korten
Artificial Intelligence and Mobile Robots: Successes and Challenges David Kortenkamp NASA Johnson Space Center Metrica Inc./TRACLabs Houton TX 77058 kortenkamp@jsc.nasa.gov http://www.traclabs.com/~korten
Introduction. Prof. Lina Karam School of Electrical, Computer, & Energy Engineering Arizona State University
 EEE 508 - Digital Image & Video Processing and Compression http://lina.faculty.asu.edu/eee508/ Introduction Prof. Lina Karam School of Electrical, Computer, & Energy Engineering Arizona State University
EEE 508 - Digital Image & Video Processing and Compression http://lina.faculty.asu.edu/eee508/ Introduction Prof. Lina Karam School of Electrical, Computer, & Energy Engineering Arizona State University