Computer Vision Lecture 1
|
|
|
- Louisa Rich
- 6 years ago
- Views:
Transcription
1 Computer Vision Lecture 1 Introduction Bastian Leibe Visual Computing Institute RWTH Aachen University leibe@vision.rwth-aachen.de
2 Organization Lecturer Prof. Bastian Leibe Teaching Assistant Stefan Breuers Course webpage Computer Vision Slides will be made available on the webpage There is also an L2P electronic repository Please subscribe to the lecture on the Campus system! Important to get announcements and L2P access! 2
3 Language Official course language will be English If at least one English-speaking student is present. If not you can choose. However Please tell me when I m talking too fast or when I should repeat something in German for better understanding! You may at any time ask questions in German! You may turn in your exercises in German. You may answer exam questions in German. 3
4 Organization Structure: 3V (lecture) + 1Ü (exercises) 6 EECS credits Part of the area Applied Computer Science Place & Time Lecture: Mon 10:15 11:45 UMIC 025 Lecture/Exercises: Wed 10:15 11:45 UMIC 025 Exam Written exam Dates will be communicated soon 4
5 Exercises and Demos Exercises Typically 1 exercise sheet every 2 weeks (Matlab based) Hands-on experience with the algorithms from the lecture. Send in your solutions the night before the exercise class. No admission requirement to qualify for the exam this year! Teams are encouraged! You can form teams of up to 3 people for the exercises. Each team should only turn in one solution. But list the names of all team members in the submission. 5

6 Course Webpage Monday: Matlab tutorial 6


7 Textbooks No single textbook for the class. Basic material is covered in the following two books. D. Forsyth, J. Ponce Computer Vision A Modern Approach Prentice Hall, 2002 (available in the library s Handapparat ) R. Hartley, A. Zisserman Multiple View Geometry in Computer Vision 2 nd Ed., Cambridge Univ. Press, 2004 Additional material will be given out for some topics. Tutorials and deeper introductions. Application papers 7
 Send us an email before to confirm a time slot.")
8 How to Find Us Office: UMIC Research Centre Mies-van-der-Rohe-Strasse 15, room 124 Office hours If you have questions to the lecture, come to us. My regular office hours will be announced (additional slots are available upon request) Send us an before to confirm a time slot. Questions are welcome! 8
9 Topics of Today s Lecture What is computer vision? What does it mean to see and how do we do it? How can we make this computational? First Topic: Image Formation Details in Forsyth & Ponce, chapter 1. 9










10 Why Computer Vision? Cameras are all around us Slide credit: Kristen Grauman 10











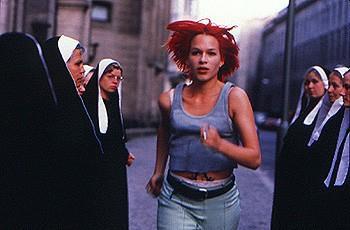


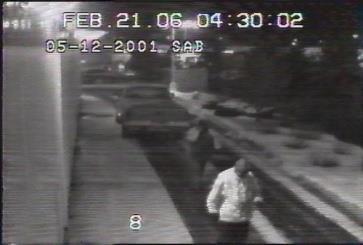

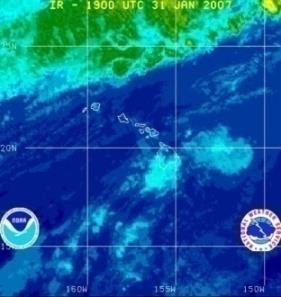
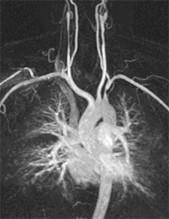



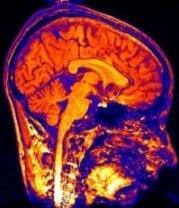
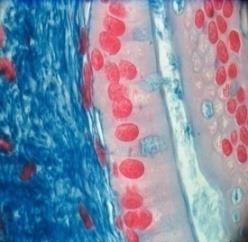



11 Images and video are everywhere Personal photo albums Movies, news, sports Internet services Surveillance and security Slide adapted from Svetlana Lazebnik Mobile and consumer applications Medical and scientific images 11
12 What is Computer Vision? Goal of Computer Vision Enable a machine to understand images and videos Automatic understanding Computing properties of the 3D world from visual data (measurement) Algorithms and representations to allow a machine to recognize objects, people, scenes, and activities. (perception and interpretation) Slide credit: Kristen Grauman 12





13 Vision for Measurement Real-time stereo Structure from motion Multi-view stereo for community photo collections Pollefeys et al. Slide credit: Svetlana Lazebnik Goesele et al. 13

14 Vision for Perception, Interpretation The Wicked Twister ride Lake Erie sky water Ferris wheel amusement park Cedar Point tree ride 12 E Objects Activities Scenes Locations Text / writing Faces Gestures Motions Emotions ride tree people waiting in line people sitting on ride deck tree bench Slide credit: Kristen Grauman tree carousel umbrellas pedestrians maxair 14
15 Related Disciplines Graphics Image processing Artificial intelligence Computer vision Algorithms Machine learning Cognitive science 15
16 Directions to Computer Vision Science Foundations of perception. How do WE see? Engineering How do we build systems that perceive the world? Many applications Medical imaging, surveillance, entertainment, graphics, 16

![to take a photo [Canon] Automatic lighting correction based](/docs-images/77/76509225/images/17-2.jpg "on face detection Slide credit: Kristen Grauman, Rob Fergus")
17 Applications: Faces and Digital Cameras Setting camera focus via face detection Camera waits for everyone to smile to take a photo [Canon] Automatic lighting correction based on face detection Slide credit: Kristen Grauman, Rob Fergus 17


18 Segmentation Automatic background removal from images Functionality is included in Microsoft Office

19 Matching Stitch your photos together to create panoramas 20

20 Applications: Vision for Mobile Phones Take photos of objects as queries for visual search Slide credit: Svetlana Lazebnik

")


21 Applications: Vision-based Interfaces Games (Microsoft Kinect) Assistive technology systems Camera Mouse Boston College Slide adapted from Kristen Grauman 22



22 Applications: Medical & Neuroimaging fmri data Golland et al. Image guided surgery MIT AI Vision Group Slide credit: Kristen Grauman 23



 Slide adapted")
23 Applications: Visual Special Effects The Matrix MoCap for Pirates of the Carribean, Industrial Light and Magic (Source: S. Seitz) Slide adapted from Svetlana Lazebnik, Kristen Grauman 24




24 Applications: Safety & Security Autonomous robots Driver assistance Monitoring pools (Poseidon) Pedestrian detection [MERL, Viola et al.] Slide credit: Kristen Grauman Surveillance 25
25 Ok, Let s Do It Any Obstacles? 1966: Seymour Papert directs an undergraduate student to solve "the problem of computer vision" as a summer project. Obviously, computer vision was too difficult for that 26







26 Challenges: Many Nuisance Parameters Illumination Object pose Clutter Occlusions Intra-class appearance Viewpoint Slide credit: Kristen Grauman 27





27 Challenges: Intra-Category Variation Slide credit: Fergus, FeiFei, Torralba 28
28 Challenges: Complexity Thousands to millions of pixels in an image 3,000-30,000 human recognizable object categories 30+ degrees of freedom in the pose of articulated objects (humans) Billions of images indexed by Google Image Search 18 billion+ prints produced from digital camera images in million camera phones sold in 2005 About half of the cerebral cortex in primates is devoted to processing visual information [Felleman and van Essen 1991]. Slide credit: Kristen Grauman 29









29 So, Should We Give Up? NO! Very active research area with exciting progress! Slide credit: Kristen Grauman 30


30 Things Are Starting to Work Computer Vision in realistic scenarios is becoming feasible!
31 Course Outline Image Processing Basics Segmentation Local Features & Matching Object Recognition and Categorization 3D Reconstruction Motion and Optical Flow 33
32 Course Outline Image Processing Basics Segmentation Local Features & Matching Object Recognition and Categorization 3D Reconstruction Motion and Optical Flow 34

33 Course Outline Image Processing Basics Segmentation Local Features & Matching Object Recognition and Categorization 3D Reconstruction Motion and Optical Flow 35
34 Course Outline Image Processing Basics Segmentation Local Features & Matching Object Recognition and Categorization 3D Reconstruction Motion and Optical Flow 36
35 Course Outline Image Processing Basics Segmentation Local Features & Matching Object Recognition and Categorization 3D Reconstruction Motion and Optical Flow 37



36 Course Outline Image Processing Basics Segmentation Local Features & Matching Object Recognition and Categorization 3D Reconstruction Motion and Optical Flow 38
37 Topics of Today s Lecture What is computer vision? What does it mean to see and how do we do it? How can we make this computational? First Topic: Image Formation Details in Forsyth & Ponce, chapter 1. 39
![Camera Obscura Around 1519, Leonardo da Vinci (1452 1519) When images of illuminated objects penetrate through a small hole into a very dark room you will see [on the opposite wall] these](/docs-images/77/76509225/images/38-0.jpg "objects in their proper form and color, reduced in size in a reversed position owing to the intersection of the rays Slide credit: Bernt Schiele 40 Source: http://www.acmi.net.")
38 Camera Obscura Around 1519, Leonardo da Vinci ( ) When images of illuminated objects penetrate through a small hole into a very dark room you will see [on the opposite wall] these objects in their proper form and color, reduced in size in a reversed position owing to the intersection of the rays Slide credit: Bernt Schiele 40 Source:
 and scientists Slide credit:")
39 Camera Obscura Used by artists (e.g. Vermeer 17th century) and scientists Slide credit: Bernt Schiele 41




40 Camera Obscura Jetty at Margate England, An attraction in the late 19 th century 42 Adapted from R. Duraiswami
41 Pinhole Camera (Simple) standard and abstract model today Box with a small hole in it Works in practice Source: Forsyth & Ponce 43

42 Pinhole Size / Aperture Pinhole too big many directions are averaged, blurring the image Pinhole too small diffraction effects blur the image Generally, pinhole cameras are dark, because a very small set of rays from a particular point hits the screen. Source: Forsyth & Ponce 44
43 The Reason for Lenses Keep the image in sharp focus while gathering light from a large area Source: Forsyth & Ponce 45
44 The Thin Lens 1 z' - 1 z = 1 f Source: Forsyth & Ponce 46

45 Focus and Depth of Field Thin lens: scene points at distinct depths come in focus at different image planes. circles of confusion (Real camera lens systems have greater depth of field.) Depth of field: distance between image planes where blur is tolerable Source: Shapiro & Stockman 47


46 Focus and Depth of Field How does the aperture affect the depth of field? A smaller aperture increases the range in which the object is approximately in focus Flower images from Wikipedia Slide from S. Seitz 48


47 Application: Depth from (De-)Focus Images from same point of view, different camera parameters 3D Shape / depth estimates Slide credit: Kristen Grauman 49 [figs from H. Jin and P. Favaro, 2002]

48 Field of View Angular measure of the portion of 3D space seen by the camera Slide credit: Kristen Grauman 50 Images from

49 Field of View Depends on Focal Length As f gets smaller, image becomes more wide angle More world points project onto the finite image plane As f gets larger, image becomes more telescopic Smaller part of the world projects onto the finite image plane 51 from R. Duraiswami
50 Digital Images Film is replaced by a sensor array Current technology: arrays of charge coupled devices (CCD) Discretize the image into pixels Quantize light intensities into pixel values. Image source: Michael Black 52



51 Resolution Sensor: size of real world scene element that images to a single pixel Image: number of pixels Influences what analysis is feasible, affects best representation choice Slide credit: Kristen Grauman 53 [figs from Efros et al., Mori et al.]

 54 Source:")
52 Color Sensing in Digital Cameras Bayer grid Estimate missing components from neighboring values (demosaicing) 54 Source: Steve Seitz
 numbers?")

53 Grayscale Image Problem of Computer Vision How can we recognize fruits from an array of (gray-scale) numbers? How can we perceive depth from an array of (gray-scale) numbers? How do we humans do it? How can we make a computer do it? Slide credit: Michael Black 56



54 Next Lectures First few lectures: low-level vision Binary image processing Filtering operations Edge and structure extraction Color Segmentation and grouping Next week: Binary image processing Monday : Exercise 1 Intro Matlab, basic image operations 72
55 Questions? 73
Computer Vision. Thursday, August 30
 Computer Vision Thursday, August 30 1 Today Course overview Requirements, logistics Image formation 2 Introductions Instructor: Prof. Kristen Grauman grauman @ cs TAY 4.118, Thurs 2-4 pm TA: Sudheendra
Computer Vision Thursday, August 30 1 Today Course overview Requirements, logistics Image formation 2 Introductions Instructor: Prof. Kristen Grauman grauman @ cs TAY 4.118, Thurs 2-4 pm TA: Sudheendra
Today I t n d ro ucti tion to computer vision Course overview Course requirements
 COMP 776: Computer Vision Today Introduction ti to computer vision i Course overview Course requirements The goal of computer vision To extract t meaning from pixels What we see What a computer sees Source:
COMP 776: Computer Vision Today Introduction ti to computer vision i Course overview Course requirements The goal of computer vision To extract t meaning from pixels What we see What a computer sees Source:
Image Formation III Chapter 1 (Forsyth&Ponce) Cameras Lenses & Sensors
 Cameras Lenses & Sensors") Image Formation III Chapter 1 (Forsyth&Ponce) Cameras Lenses & Sensors Guido Gerig CS-GY 6643, Spring 2017 (slides modified from Marc Pollefeys, UNC Chapel Hill/ ETH Zurich, With content from Prof. Trevor
Image Formation III Chapter 1 (Forsyth&Ponce) Cameras Lenses & Sensors Guido Gerig CS-GY 6643, Spring 2017 (slides modified from Marc Pollefeys, UNC Chapel Hill/ ETH Zurich, With content from Prof. Trevor
Today. CS 395T Visual Recognition. Course content. Administration. Expectations. Paper reviews
 Today CS 395T Visual Recognition Course logistics Overview Volunteers, prep for next week Thursday, January 18 Administration Class: Tues / Thurs 12:30-2 PM Instructor: Kristen Grauman grauman at cs.utexas.edu
Today CS 395T Visual Recognition Course logistics Overview Volunteers, prep for next week Thursday, January 18 Administration Class: Tues / Thurs 12:30-2 PM Instructor: Kristen Grauman grauman at cs.utexas.edu
Lecture 1 Introduction to Computer Vision. Lin ZHANG, PhD School of Software Engineering, Tongji University Spring 2015
 Lecture 1 Introduction to Computer Vision Lin ZHANG, PhD School of Software Engineering, Tongji University Spring 2015 Course Info Contact Information Room 314, Jishi Building Email: cslinzhang@tongji.edu.cn
Lecture 1 Introduction to Computer Vision Lin ZHANG, PhD School of Software Engineering, Tongji University Spring 2015 Course Info Contact Information Room 314, Jishi Building Email: cslinzhang@tongji.edu.cn
Unit 1: Image Formation
 Unit 1: Image Formation 1. Geometry 2. Optics 3. Photometry 4. Sensor Readings Szeliski 2.1-2.3 & 6.3.5 1 Physical parameters of image formation Geometric Type of projection Camera pose Optical Sensor
Unit 1: Image Formation 1. Geometry 2. Optics 3. Photometry 4. Sensor Readings Szeliski 2.1-2.3 & 6.3.5 1 Physical parameters of image formation Geometric Type of projection Camera pose Optical Sensor
CSE 473/573 Computer Vision and Image Processing (CVIP) Ifeoma Nwogu
 Ifeoma Nwogu") CSE 473/573 Computer Vision and Image Processing (CVIP) Ifeoma Nwogu inwogu@buffalo.edu Today Logistics Schedule Introductions What is computer vision? Why is vision so hard? Prerequisites This course
CSE 473/573 Computer Vision and Image Processing (CVIP) Ifeoma Nwogu inwogu@buffalo.edu Today Logistics Schedule Introductions What is computer vision? Why is vision so hard? Prerequisites This course
COMP 776: Computer Vision
 COMP 776: Computer Vision Basic Info Instructor: Svetlana Lazebnik (lazebnik@cs.unc.edu) Office hours: By appointment, FB 244 Textbook (recommended): Forsyth & Ponce, Computer Vision: A Modern Approach
COMP 776: Computer Vision Basic Info Instructor: Svetlana Lazebnik (lazebnik@cs.unc.edu) Office hours: By appointment, FB 244 Textbook (recommended): Forsyth & Ponce, Computer Vision: A Modern Approach
Lecture 1 Introduction to Computer Vision. Lin ZHANG, PhD School of Software Engineering, Tongji University Spring 2014
 Lecture 1 Introduction to Computer Vision Lin ZHANG, PhD School of Software Engineering, Tongji University Spring 2014 Course Info Contact Information Room 314, Jishi Building Email: cslinzhang@tongji.edu.cn
Lecture 1 Introduction to Computer Vision Lin ZHANG, PhD School of Software Engineering, Tongji University Spring 2014 Course Info Contact Information Room 314, Jishi Building Email: cslinzhang@tongji.edu.cn
CSE 408 Multimedia Information System
 CSE 408 Multimedia Information System Intro to Images & Vision Yezhou Yang Lots of slides from Tamara Berg and L. Feifei Intro to Computer Vision Source: L. Lazebnik The goal of computer vision To perceive
CSE 408 Multimedia Information System Intro to Images & Vision Yezhou Yang Lots of slides from Tamara Berg and L. Feifei Intro to Computer Vision Source: L. Lazebnik The goal of computer vision To perceive
Introduction. BIL719 Computer Vision Pinar Duygulu Hacettepe University
 Introduction BIL719 Computer Vision Pinar Duygulu Hacettepe University Basic Info Textbooks (suggested): Forsyth & Ponce, Computer Vision: A Modern Approach Richard Szeliski, Computer Vision: Algorithms
Introduction BIL719 Computer Vision Pinar Duygulu Hacettepe University Basic Info Textbooks (suggested): Forsyth & Ponce, Computer Vision: A Modern Approach Richard Szeliski, Computer Vision: Algorithms
Introduction. Visual data acquisition devices. The goal of computer vision. The goal of computer vision. Vision as measurement device
 Spring 15 CIS 5543 Computer Vision Visual data acquisition devices Introduction Haibin Ling http://www.dabi.temple.edu/~hbling/teaching/15s_5543/index.html Revised from S. Lazebnik The goal of computer
Spring 15 CIS 5543 Computer Vision Visual data acquisition devices Introduction Haibin Ling http://www.dabi.temple.edu/~hbling/teaching/15s_5543/index.html Revised from S. Lazebnik The goal of computer
Lecture 1 Introduction to Computer Vision. Lin ZHANG, PhD School of Software Engineering, Tongji University Spring 2018
 Lecture 1 Introduction to Computer Vision Lin ZHANG, PhD School of Software Engineering, Tongji University Spring 2018 Course Info Contact Information Room 408L, Jishi Building Email: cslinzhang@tongji.edu.cn
Lecture 1 Introduction to Computer Vision Lin ZHANG, PhD School of Software Engineering, Tongji University Spring 2018 Course Info Contact Information Room 408L, Jishi Building Email: cslinzhang@tongji.edu.cn
Spring 2018 CS543 / ECE549 Computer Vision. Course webpage URL:
 Spring 2018 CS543 / ECE549 Computer Vision Course webpage URL: http://slazebni.cs.illinois.edu/spring18/ The goal of computer vision To extract meaning from pixels What we see What a computer sees Source:
Spring 2018 CS543 / ECE549 Computer Vision Course webpage URL: http://slazebni.cs.illinois.edu/spring18/ The goal of computer vision To extract meaning from pixels What we see What a computer sees Source:
High Level Computer Vision. Introduction - April 16, Bernt Schiele & Mario Fritz MPI Informatics and Saarland University, Saarbrücken, Germany
 Perceptual and Sensory Augmented Computing High Level Computer Vision Introduction - April 16, 2014 MPI Informatics and Saarland University, Saarbrücken, Germany http://www.d2.mpi-inf.mpg.de/cv Computer
Perceptual and Sensory Augmented Computing High Level Computer Vision Introduction - April 16, 2014 MPI Informatics and Saarland University, Saarbrücken, Germany http://www.d2.mpi-inf.mpg.de/cv Computer
CS6550 Computer Vision
 CS6550 Computer Vision Class Meeting: M7M8 (3:30pm 5:20pm), R6 (2:20pm 3:10pm). Rm 106 Delta Bldg., 台達館 106 室 Instructor: Prof. Shang-Hong Lai, Rm. 636 Delta Bldg., 賴尚宏, 台達館 636 室, Tel: ext. 42958, Email:
CS6550 Computer Vision Class Meeting: M7M8 (3:30pm 5:20pm), R6 (2:20pm 3:10pm). Rm 106 Delta Bldg., 台達館 106 室 Instructor: Prof. Shang-Hong Lai, Rm. 636 Delta Bldg., 賴尚宏, 台達館 636 室, Tel: ext. 42958, Email:
CENG 595 Selected Topics in Computer Engineering Computer Vision. Zafer ARICAN, PhD
 CENG 595 Selected Topics in Computer Engineering Computer Vision Zafer ARICAN, PhD Today Administrivia What is Computer Vision? Why is it a difficult problem? State-of-the art Brief course syllabus Instructor
CENG 595 Selected Topics in Computer Engineering Computer Vision Zafer ARICAN, PhD Today Administrivia What is Computer Vision? Why is it a difficult problem? State-of-the art Brief course syllabus Instructor
Building a Real Camera. Slides Credit: Svetlana Lazebnik
 Building a Real Camera Slides Credit: Svetlana Lazebnik Home-made pinhole camera Slide by A. Efros http://www.debevec.org/pinhole/ Shrinking the aperture Why not make the aperture as small as possible?
Building a Real Camera Slides Credit: Svetlana Lazebnik Home-made pinhole camera Slide by A. Efros http://www.debevec.org/pinhole/ Shrinking the aperture Why not make the aperture as small as possible?
Image Formation. Dr. Gerhard Roth. COMP 4102A Winter 2015 Version 3
 Image Formation Dr. Gerhard Roth COMP 4102A Winter 2015 Version 3 1 Image Formation Two type of images Intensity image encodes light intensities (passive sensor) Range (depth) image encodes shape and distance
Image Formation Dr. Gerhard Roth COMP 4102A Winter 2015 Version 3 1 Image Formation Two type of images Intensity image encodes light intensities (passive sensor) Range (depth) image encodes shape and distance
CS6670: Computer Vision
 CS6670: Computer Vision Noah Snavely Lecture 4a: Cameras Source: S. Lazebnik Reading Szeliski chapter 2.2.3, 2.3 Image formation Let s design a camera Idea 1: put a piece of film in front of an object
CS6670: Computer Vision Noah Snavely Lecture 4a: Cameras Source: S. Lazebnik Reading Szeliski chapter 2.2.3, 2.3 Image formation Let s design a camera Idea 1: put a piece of film in front of an object
CSE 473/573 Computer Vision and Image Processing (CVIP)
") CSE 473/573 Computer Vision and Image Processing (CVIP) Ifeoma Nwogu inwogu@buffalo.edu Lecture 4 Image formation(part I) Schedule Last class linear algebra overview Today Image formation and camera properties
CSE 473/573 Computer Vision and Image Processing (CVIP) Ifeoma Nwogu inwogu@buffalo.edu Lecture 4 Image formation(part I) Schedule Last class linear algebra overview Today Image formation and camera properties
Cameras. CSE 455, Winter 2010 January 25, 2010
 Cameras CSE 455, Winter 2010 January 25, 2010 Announcements New Lecturer! Neel Joshi, Ph.D. Post-Doctoral Researcher Microsoft Research neel@cs Project 1b (seam carving) was due on Friday the 22 nd Project
Cameras CSE 455, Winter 2010 January 25, 2010 Announcements New Lecturer! Neel Joshi, Ph.D. Post-Doctoral Researcher Microsoft Research neel@cs Project 1b (seam carving) was due on Friday the 22 nd Project
Image formation - Cameras. Grading & Project. About the course. Tentative Schedule. Course Content. Students introduction
 About the course Instructors: Haibin Ling (hbling@temple, Wachman 35) Hours Lecture: Tuesda 5:3-8:pm, TTLMAN 43B Office hour: Tuesda 3: - 5:pm, or b appointment Textbook Computer Vision: Models, Learning,
About the course Instructors: Haibin Ling (hbling@temple, Wachman 35) Hours Lecture: Tuesda 5:3-8:pm, TTLMAN 43B Office hour: Tuesda 3: - 5:pm, or b appointment Textbook Computer Vision: Models, Learning,
How do we see the world?
 The Camera 1 How do we see the world? Let s design a camera Idea 1: put a piece of film in front of an object Do we get a reasonable image? Credit: Steve Seitz 2 Pinhole camera Idea 2: Add a barrier to
The Camera 1 How do we see the world? Let s design a camera Idea 1: put a piece of film in front of an object Do we get a reasonable image? Credit: Steve Seitz 2 Pinhole camera Idea 2: Add a barrier to
Two strategies for realistic rendering capture real world data synthesize from bottom up
 Recap from Wednesday Two strategies for realistic rendering capture real world data synthesize from bottom up Both have existed for 500 years. Both are successful. Attempts to take the best of both world
Recap from Wednesday Two strategies for realistic rendering capture real world data synthesize from bottom up Both have existed for 500 years. Both are successful. Attempts to take the best of both world
Building a Real Camera
 Building a Real Camera Home-made pinhole camera Slide by A. Efros http://www.debevec.org/pinhole/ Shrinking the aperture Why not make the aperture as small as possible? Less light gets through Diffraction
Building a Real Camera Home-made pinhole camera Slide by A. Efros http://www.debevec.org/pinhole/ Shrinking the aperture Why not make the aperture as small as possible? Less light gets through Diffraction
Announcements. Image Formation: Outline. The course. How Cameras Produce Images. Earliest Surviving Photograph. Image Formation and Cameras
 Announcements Image ormation and Cameras CSE 252A Lecture 3 Assignment 0: Getting Started with Matlab is posted to web page, due Tuesday, ctober 4. Reading: Szeliski, Chapter 2 ptional Chapters 1 & 2 of
Announcements Image ormation and Cameras CSE 252A Lecture 3 Assignment 0: Getting Started with Matlab is posted to web page, due Tuesday, ctober 4. Reading: Szeliski, Chapter 2 ptional Chapters 1 & 2 of
Computer Vision. The Pinhole Camera Model
 Computer Vision The Pinhole Camera Model Filippo Bergamasco (filippo.bergamasco@unive.it) http://www.dais.unive.it/~bergamasco DAIS, Ca Foscari University of Venice Academic year 2017/2018 Imaging device
Computer Vision The Pinhole Camera Model Filippo Bergamasco (filippo.bergamasco@unive.it) http://www.dais.unive.it/~bergamasco DAIS, Ca Foscari University of Venice Academic year 2017/2018 Imaging device
MEM455/800 Robotics II/Advance Robotics Winter 2009
 Admin Stuff Course Website: http://robotics.mem.drexel.edu/mhsieh/courses/mem456/ MEM455/8 Robotics II/Advance Robotics Winter 9 Professor: Ani Hsieh Time: :-:pm Tues, Thurs Location: UG Lab, Classroom
Admin Stuff Course Website: http://robotics.mem.drexel.edu/mhsieh/courses/mem456/ MEM455/8 Robotics II/Advance Robotics Winter 9 Professor: Ani Hsieh Time: :-:pm Tues, Thurs Location: UG Lab, Classroom
Recognition problems. Object Recognition. Readings. What is recognition?
 Recognition problems Object Recognition Computer Vision CSE576, Spring 2008 Richard Szeliski What is it? Object and scene recognition Who is it? Identity recognition Where is it? Object detection What
Recognition problems Object Recognition Computer Vision CSE576, Spring 2008 Richard Szeliski What is it? Object and scene recognition Who is it? Identity recognition Where is it? Object detection What
Introduction to Computer Vision
 Introduction to Computer Vision by James Hays Image by kirkh.deviantart.com Categories of the SUN database What is Computer Vision? Computer Vision and Nearby Fields Computer Graphics: Models to Images
Introduction to Computer Vision by James Hays Image by kirkh.deviantart.com Categories of the SUN database What is Computer Vision? Computer Vision and Nearby Fields Computer Graphics: Models to Images
Image Formation. Dr. Gerhard Roth. COMP 4102A Winter 2014 Version 1
 Image Formation Dr. Gerhard Roth COMP 4102A Winter 2014 Version 1 Image Formation Two type of images Intensity image encodes light intensities (passive sensor) Range (depth) image encodes shape and distance
Image Formation Dr. Gerhard Roth COMP 4102A Winter 2014 Version 1 Image Formation Two type of images Intensity image encodes light intensities (passive sensor) Range (depth) image encodes shape and distance
IMAGE FORMATION. Light source properties. Sensor characteristics Surface. Surface reflectance properties. Optics
 IMAGE FORMATION Light source properties Sensor characteristics Surface Exposure shape Optics Surface reflectance properties ANALOG IMAGES An image can be understood as a 2D light intensity function f(x,y)
IMAGE FORMATION Light source properties Sensor characteristics Surface Exposure shape Optics Surface reflectance properties ANALOG IMAGES An image can be understood as a 2D light intensity function f(x,y)
CPSC 425: Computer Vision
 1 / 55 CPSC 425: Computer Vision Instructor: Fred Tung ftung@cs.ubc.ca Department of Computer Science University of British Columbia Lecture Notes 2015/2016 Term 2 2 / 55 Menu January 7, 2016 Topics: Image
1 / 55 CPSC 425: Computer Vision Instructor: Fred Tung ftung@cs.ubc.ca Department of Computer Science University of British Columbia Lecture Notes 2015/2016 Term 2 2 / 55 Menu January 7, 2016 Topics: Image
Lecture 2 Camera Models
 Lecture 2 Camera Models Professor Silvio Savarese Computational Vision and Geometr Lab Silvio Savarese Lecture 2-4-Jan-4 Announcements Prerequisites: an questions? This course requires knowledge of linear
Lecture 2 Camera Models Professor Silvio Savarese Computational Vision and Geometr Lab Silvio Savarese Lecture 2-4-Jan-4 Announcements Prerequisites: an questions? This course requires knowledge of linear
The Camera : Computational Photography Alexei Efros, CMU, Fall 2005
 The Camera 15-463: Computational Photography Alexei Efros, CMU, Fall 2005 How do we see the world? object film Let s design a camera Idea 1: put a piece of film in front of an object Do we get a reasonable
The Camera 15-463: Computational Photography Alexei Efros, CMU, Fall 2005 How do we see the world? object film Let s design a camera Idea 1: put a piece of film in front of an object Do we get a reasonable
Computational Approaches to Cameras
 Computational Approaches to Cameras 11/16/17 Magritte, The False Mirror (1935) Computational Photography Derek Hoiem, University of Illinois Announcements Final project proposal due Monday (see links on
Computational Approaches to Cameras 11/16/17 Magritte, The False Mirror (1935) Computational Photography Derek Hoiem, University of Illinois Announcements Final project proposal due Monday (see links on
Computational Photography and Video. Prof. Marc Pollefeys
 Computational Photography and Video Prof. Marc Pollefeys Today s schedule Introduction of Computational Photography Course facts Syllabus Digital Photography What is computational photography Convergence
Computational Photography and Video Prof. Marc Pollefeys Today s schedule Introduction of Computational Photography Course facts Syllabus Digital Photography What is computational photography Convergence
The Camera : Computational Photography Alexei Efros, CMU, Fall 2008
 The Camera 15-463: Computational Photography Alexei Efros, CMU, Fall 2008 How do we see the world? object film Let s design a camera Idea 1: put a piece of film in front of an object Do we get a reasonable
The Camera 15-463: Computational Photography Alexei Efros, CMU, Fall 2008 How do we see the world? object film Let s design a camera Idea 1: put a piece of film in front of an object Do we get a reasonable
Lecture 02 Image Formation 1
 Institute of Informatics Institute of Neuroinformatics Lecture 02 Image Formation 1 Davide Scaramuzza http://rpg.ifi.uzh.ch 1 Lab Exercise 1 - Today afternoon Room ETH HG E 1.1 from 13:15 to 15:00 Work
Institute of Informatics Institute of Neuroinformatics Lecture 02 Image Formation 1 Davide Scaramuzza http://rpg.ifi.uzh.ch 1 Lab Exercise 1 - Today afternoon Room ETH HG E 1.1 from 13:15 to 15:00 Work
VC 11/12 T2 Image Formation
 VC 11/12 T2 Image Formation Mestrado em Ciência de Computadores Mestrado Integrado em Engenharia de Redes e Sistemas Informáticos Miguel Tavares Coimbra Outline Computer Vision? The Human Visual System
VC 11/12 T2 Image Formation Mestrado em Ciência de Computadores Mestrado Integrado em Engenharia de Redes e Sistemas Informáticos Miguel Tavares Coimbra Outline Computer Vision? The Human Visual System
CS 131 Lecture 1: Course introduction
 CS 131 Lecture 1: Course introduction Olivier Moindrot Department of Computer Science Stanford University Stanford, CA 94305 olivierm@stanford.edu 1 What is computer vision? 1.1 Definition Two definitions
CS 131 Lecture 1: Course introduction Olivier Moindrot Department of Computer Science Stanford University Stanford, CA 94305 olivierm@stanford.edu 1 What is computer vision? 1.1 Definition Two definitions
VC 16/17 TP2 Image Formation
 VC 16/17 TP2 Image Formation Mestrado em Ciência de Computadores Mestrado Integrado em Engenharia de Redes e Sistemas Informáticos Hélder Filipe Pinto de Oliveira Outline Computer Vision? The Human Visual
VC 16/17 TP2 Image Formation Mestrado em Ciência de Computadores Mestrado Integrado em Engenharia de Redes e Sistemas Informáticos Hélder Filipe Pinto de Oliveira Outline Computer Vision? The Human Visual
Image Formation. World Optics Sensor Signal. Computer Vision. Introduction to. Light (Energy) Source. Surface Imaging Plane. Pinhole Lens.
 Source. Surface Imaging Plane. Pinhole Lens.") Image Formation Light (Energy) Source Surface Imaging Plane Pinhole Lens World Optics Sensor Signal B&W Film Color Film TV Camera Silver Density Silver density in three color layers Electrical Today Optics:
Image Formation Light (Energy) Source Surface Imaging Plane Pinhole Lens World Optics Sensor Signal B&W Film Color Film TV Camera Silver Density Silver density in three color layers Electrical Today Optics:
CS6670: Computer Vision
 CS6670: Computer Vision Noah Snavely Lecture 5: Cameras and Projection Szeliski 2.1.3-2.1.6 Reading Announcements Project 1 assigned, see projects page: http://www.cs.cornell.edu/courses/cs6670/2011sp/projects/projects.html
CS6670: Computer Vision Noah Snavely Lecture 5: Cameras and Projection Szeliski 2.1.3-2.1.6 Reading Announcements Project 1 assigned, see projects page: http://www.cs.cornell.edu/courses/cs6670/2011sp/projects/projects.html
VC 14/15 TP2 Image Formation
 VC 14/15 TP2 Image Formation Mestrado em Ciência de Computadores Mestrado Integrado em Engenharia de Redes e Sistemas Informáticos Miguel Tavares Coimbra Outline Computer Vision? The Human Visual System
VC 14/15 TP2 Image Formation Mestrado em Ciência de Computadores Mestrado Integrado em Engenharia de Redes e Sistemas Informáticos Miguel Tavares Coimbra Outline Computer Vision? The Human Visual System
CSE 527: Introduction to Computer Vision
 CSE 527: Introduction to Computer Vision Week 2 - Class 2: Vision, Physics, Cameras September 7th, 2017 Today Physics Human Vision Eye Brain Perspective Projection Camera Models Image Formation Digital
CSE 527: Introduction to Computer Vision Week 2 - Class 2: Vision, Physics, Cameras September 7th, 2017 Today Physics Human Vision Eye Brain Perspective Projection Camera Models Image Formation Digital
ME 6406 MACHINE VISION. Georgia Institute of Technology
 ME 6406 MACHINE VISION Georgia Institute of Technology Class Information Instructor Professor Kok-Meng Lee MARC 474 Office hours: Tues/Thurs 1:00-2:00 pm kokmeng.lee@me.gatech.edu (404)-894-7402 Class
ME 6406 MACHINE VISION Georgia Institute of Technology Class Information Instructor Professor Kok-Meng Lee MARC 474 Office hours: Tues/Thurs 1:00-2:00 pm kokmeng.lee@me.gatech.edu (404)-894-7402 Class
Overview. Pinhole camera model Projective geometry Vanishing points and lines Projection matrix Cameras with Lenses Color Digital image
 Camera & Color Overview Pinhole camera model Projective geometry Vanishing points and lines Projection matrix Cameras with Lenses Color Digital image Book: Hartley 6.1, Szeliski 2.1.5, 2.2, 2.3 The trip
Camera & Color Overview Pinhole camera model Projective geometry Vanishing points and lines Projection matrix Cameras with Lenses Color Digital image Book: Hartley 6.1, Szeliski 2.1.5, 2.2, 2.3 The trip
6.098 Digital and Computational Photography Advanced Computational Photography. Bill Freeman Frédo Durand MIT - EECS
 6.098 Digital and Computational Photography 6.882 Advanced Computational Photography Bill Freeman Frédo Durand MIT - EECS Administrivia PSet 1 is out Due Thursday February 23 Digital SLR initiation? During
6.098 Digital and Computational Photography 6.882 Advanced Computational Photography Bill Freeman Frédo Durand MIT - EECS Administrivia PSet 1 is out Due Thursday February 23 Digital SLR initiation? During
CS 534: Computer Vision
 CS 534: Computer Vision Spring 2005 Ahmed Elgammal Dept of Computer Science Computer Vision Introduction - 1 Outlines Vision What and Why? Human vision Computer vision General computer vision applications
CS 534: Computer Vision Spring 2005 Ahmed Elgammal Dept of Computer Science Computer Vision Introduction - 1 Outlines Vision What and Why? Human vision Computer vision General computer vision applications
Digital image processing vs. computer vision Higher-level anchoring
 Digital image processing vs. computer vision Higher-level anchoring Václav Hlaváč Czech Technical University in Prague Faculty of Electrical Engineering, Department of Cybernetics Center for Machine Perception
Digital image processing vs. computer vision Higher-level anchoring Václav Hlaváč Czech Technical University in Prague Faculty of Electrical Engineering, Department of Cybernetics Center for Machine Perception
CSE 455: Computer Vision
 CSE 455: Computer Vision Instructors TAs Neel Joshi neel@cs Ira Kemelmacher kemelmi@cs Ian Simon iansimon@cs Rahul Garg rahul@cs Jiun-Hung Chen jhchen@cs Web Page http://www.cs.washington.edu/455 Time:
CSE 455: Computer Vision Instructors TAs Neel Joshi neel@cs Ira Kemelmacher kemelmi@cs Ian Simon iansimon@cs Rahul Garg rahul@cs Jiun-Hung Chen jhchen@cs Web Page http://www.cs.washington.edu/455 Time:
LENSES. INEL 6088 Computer Vision
 LENSES INEL 6088 Computer Vision Digital camera A digital camera replaces film with a sensor array Each cell in the array is a Charge Coupled Device light-sensitive diode that converts photons to electrons
LENSES INEL 6088 Computer Vision Digital camera A digital camera replaces film with a sensor array Each cell in the array is a Charge Coupled Device light-sensitive diode that converts photons to electrons
Announcement A total of 5 (five) late days are allowed for projects. Office hours
 late days are allowed for projects. Office hours") Announcement A total of 5 (five) late days are allowed for projects. Office hours Me: 3:50-4:50pm Thursday (or by appointment) Jake: 12:30-1:30PM Monday and Wednesday Image Formation Digital Camera Film
Announcement A total of 5 (five) late days are allowed for projects. Office hours Me: 3:50-4:50pm Thursday (or by appointment) Jake: 12:30-1:30PM Monday and Wednesday Image Formation Digital Camera Film
CSCE 763: Digital Image Processing
 CSCE 763: Digital Image Processing Spring 2018 Yan Tong Department of Computer Science and Engineering University of South Carolina Today s Agenda Welcome Tentative Syllabus Topics covered in the course
CSCE 763: Digital Image Processing Spring 2018 Yan Tong Department of Computer Science and Engineering University of South Carolina Today s Agenda Welcome Tentative Syllabus Topics covered in the course
Basic principles of photography. David Capel 346B IST
 Basic principles of photography David Capel 346B IST Latin Camera Obscura = Dark Room Light passing through a small hole produces an inverted image on the opposite wall Safely observing the solar eclipse
Basic principles of photography David Capel 346B IST Latin Camera Obscura = Dark Room Light passing through a small hole produces an inverted image on the opposite wall Safely observing the solar eclipse
Colorado School of Mines. Computer Vision. Professor William Hoff Dept of Electrical Engineering &Computer Science.
 Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Sensors and Image Formation Imaging sensors and models of image formation Coordinate systems Digital
Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Sensors and Image Formation Imaging sensors and models of image formation Coordinate systems Digital
DIGITAL IMAGE PROCESSING
 DIGITAL IMAGE PROCESSING Lecture 1 Introduction Tammy Riklin Raviv Electrical and Computer Engineering Ben-Gurion University of the Negev 2 Introduction to Digital Image Processing Lecturer: Dr. Tammy
DIGITAL IMAGE PROCESSING Lecture 1 Introduction Tammy Riklin Raviv Electrical and Computer Engineering Ben-Gurion University of the Negev 2 Introduction to Digital Image Processing Lecturer: Dr. Tammy
CS 376b Computer Vision
 CS 376b Computer Vision 09 / 03 / 2014 Instructor: Michael Eckmann Today s Topics This is technically a lab/discussion session, but I'll treat it as a lecture today. Introduction to the course layout,
CS 376b Computer Vision 09 / 03 / 2014 Instructor: Michael Eckmann Today s Topics This is technically a lab/discussion session, but I'll treat it as a lecture today. Introduction to the course layout,
General Imaging System
 General Imaging System Lecture Slides ME 4060 Machine Vision and Vision-based Control Chapter 5 Image Sensing and Acquisition By Dr. Debao Zhou 1 2 Light, Color, and Electromagnetic Spectrum Penetrate
General Imaging System Lecture Slides ME 4060 Machine Vision and Vision-based Control Chapter 5 Image Sensing and Acquisition By Dr. Debao Zhou 1 2 Light, Color, and Electromagnetic Spectrum Penetrate
Lenses, exposure, and (de)focus
focus") Lenses, exposure, and (de)focus http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 15 Course announcements Homework 4 is out. - Due October 26
Lenses, exposure, and (de)focus http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 15 Course announcements Homework 4 is out. - Due October 26
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt.
 CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Session 1 - Introduction Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering Lab e-mail:
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Session 1 - Introduction Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering Lab e-mail:
Projection. Announcements. Müller-Lyer Illusion. Image formation. Readings Nalwa 2.1
 Announcements Mailing list (you should have received messages) Project 1 additional test sequences online Projection Readings Nalwa 2.1 Müller-Lyer Illusion Image formation object film by Pravin Bhat http://www.michaelbach.de/ot/sze_muelue/index.html
Announcements Mailing list (you should have received messages) Project 1 additional test sequences online Projection Readings Nalwa 2.1 Müller-Lyer Illusion Image formation object film by Pravin Bhat http://www.michaelbach.de/ot/sze_muelue/index.html
Practical Image and Video Processing Using MATLAB
 Practical Image and Video Processing Using MATLAB Chapter 1 Introduction and overview What will we learn? What is image processing? What are the main applications of image processing? What is an image?
Practical Image and Video Processing Using MATLAB Chapter 1 Introduction and overview What will we learn? What is image processing? What are the main applications of image processing? What is an image?
Single-view Metrology and Cameras
 Single-view Metrology and Cameras 10/10/17 Computational Photography Derek Hoiem, University of Illinois Project 2 Results Incomplete list of great project pages Haohang Huang: Best presented project;
Single-view Metrology and Cameras 10/10/17 Computational Photography Derek Hoiem, University of Illinois Project 2 Results Incomplete list of great project pages Haohang Huang: Best presented project;
Image Processing & Projective geometry
 Image Processing & Projective geometry Arunkumar Byravan Partial slides borrowed from Jianbo Shi & Steve Seitz Color spaces RGB Red, Green, Blue HSV Hue, Saturation, Value Why HSV? HSV separates luma,
Image Processing & Projective geometry Arunkumar Byravan Partial slides borrowed from Jianbo Shi & Steve Seitz Color spaces RGB Red, Green, Blue HSV Hue, Saturation, Value Why HSV? HSV separates luma,
Image Formation and Capture
 Figure credits: B. Curless, E. Hecht, W.J. Smith, B.K.P. Horn, A. Theuwissen, and J. Malik Image Formation and Capture COS 429: Computer Vision Image Formation and Capture Real world Optics Sensor Devices
Figure credits: B. Curless, E. Hecht, W.J. Smith, B.K.P. Horn, A. Theuwissen, and J. Malik Image Formation and Capture COS 429: Computer Vision Image Formation and Capture Real world Optics Sensor Devices
CS559: Computer Graphics. Lecture 2: Image Formation in Eyes and Cameras Li Zhang Spring 2008
 CS559: Computer Graphics Lecture 2: Image Formation in Eyes and Cameras Li Zhang Spring 2008 Today Eyes Cameras Light Why can we see? Visible Light and Beyond Infrared, e.g. radio wave longer wavelength
CS559: Computer Graphics Lecture 2: Image Formation in Eyes and Cameras Li Zhang Spring 2008 Today Eyes Cameras Light Why can we see? Visible Light and Beyond Infrared, e.g. radio wave longer wavelength
Capturing Light. The Light Field. Grayscale Snapshot 12/1/16. P(q, f)
") Capturing Light Rooms by the Sea, Edward Hopper, 1951 The Penitent Magdalen, Georges de La Tour, c. 1640 Some slides from M. Agrawala, F. Durand, P. Debevec, A. Efros, R. Fergus, D. Forsyth, M. Levoy,
Capturing Light Rooms by the Sea, Edward Hopper, 1951 The Penitent Magdalen, Georges de La Tour, c. 1640 Some slides from M. Agrawala, F. Durand, P. Debevec, A. Efros, R. Fergus, D. Forsyth, M. Levoy,
Computer Vision Slides curtesy of Professor Gregory Dudek
 Computer Vision Slides curtesy of Professor Gregory Dudek Ioannis Rekleitis Why vision? Passive (emits nothing). Discreet. Energy efficient. Intuitive. Powerful (works well for us, right?) Long and short
Computer Vision Slides curtesy of Professor Gregory Dudek Ioannis Rekleitis Why vision? Passive (emits nothing). Discreet. Energy efficient. Intuitive. Powerful (works well for us, right?) Long and short
MIT CSAIL Advances in Computer Vision Fall Problem Set 6: Anaglyph Camera Obscura
 MIT CSAIL 6.869 Advances in Computer Vision Fall 2013 Problem Set 6: Anaglyph Camera Obscura Posted: Tuesday, October 8, 2013 Due: Thursday, October 17, 2013 You should submit a hard copy of your work
MIT CSAIL 6.869 Advances in Computer Vision Fall 2013 Problem Set 6: Anaglyph Camera Obscura Posted: Tuesday, October 8, 2013 Due: Thursday, October 17, 2013 You should submit a hard copy of your work
CSCI 1290: Comp Photo
 CSCI 29: Comp Photo Fall 28 @ Brown University James Tompkin Many slides thanks to James Hays old CS 29 course, along with all of its acknowledgements. Things I forgot on Thursday Grads are not required
CSCI 29: Comp Photo Fall 28 @ Brown University James Tompkin Many slides thanks to James Hays old CS 29 course, along with all of its acknowledgements. Things I forgot on Thursday Grads are not required
Wavefront coding. Refocusing & Light Fields. Wavefront coding. Final projects. Is depth of field a blur? Frédo Durand Bill Freeman MIT - EECS
 6.098 Digital and Computational Photography 6.882 Advanced Computational Photography Final projects Send your slides by noon on Thrusday. Send final report Refocusing & Light Fields Frédo Durand Bill Freeman
6.098 Digital and Computational Photography 6.882 Advanced Computational Photography Final projects Send your slides by noon on Thrusday. Send final report Refocusing & Light Fields Frédo Durand Bill Freeman
Lecture 7: Camera Models
 Lecture 7: Camera Models Professor Stanford Vision Lab 1 What we will learn toda? Pinhole cameras Cameras & lenses The geometr of pinhole cameras Reading: [FP]Chapters 1 3 [HZ] Chapter 6 2 What we will
Lecture 7: Camera Models Professor Stanford Vision Lab 1 What we will learn toda? Pinhole cameras Cameras & lenses The geometr of pinhole cameras Reading: [FP]Chapters 1 3 [HZ] Chapter 6 2 What we will
CPSC 4040/6040 Computer Graphics Images. Joshua Levine
 CPSC 4040/6040 Computer Graphics Images Joshua Levine levinej@clemson.edu Lecture 04 Displays and Optics Sept. 1, 2015 Slide Credits: Kenny A. Hunt Don House Torsten Möller Hanspeter Pfister Agenda Open
CPSC 4040/6040 Computer Graphics Images Joshua Levine levinej@clemson.edu Lecture 04 Displays and Optics Sept. 1, 2015 Slide Credits: Kenny A. Hunt Don House Torsten Möller Hanspeter Pfister Agenda Open
To Do. Advanced Computer Graphics. Outline. Computational Imaging. How do we see the world? Pinhole camera
 Advanced Computer Graphics CSE 163 [Spring 2017], Lecture 14 Ravi Ramamoorthi http://www.cs.ucsd.edu/~ravir To Do Assignment 2 due May 19 Any last minute issues or questions? Next two lectures: Imaging,
Advanced Computer Graphics CSE 163 [Spring 2017], Lecture 14 Ravi Ramamoorthi http://www.cs.ucsd.edu/~ravir To Do Assignment 2 due May 19 Any last minute issues or questions? Next two lectures: Imaging,
Princeton University COS429 Computer Vision Problem Set 1: Building a Camera
 Princeton University COS429 Computer Vision Problem Set 1: Building a Camera What to submit: You need to submit two files: one PDF file for the report that contains your name, Princeton NetID, all the
Princeton University COS429 Computer Vision Problem Set 1: Building a Camera What to submit: You need to submit two files: one PDF file for the report that contains your name, Princeton NetID, all the
Dr F. Cuzzolin 1. September 29, 2015
 P00407 Principles of Computer Vision 1 1 Department of Computing and Communication Technologies Oxford Brookes University, UK September 29, 2015 September 29, 2015 1 / 73 Outline of the Lecture 1 2 Basics
P00407 Principles of Computer Vision 1 1 Department of Computing and Communication Technologies Oxford Brookes University, UK September 29, 2015 September 29, 2015 1 / 73 Outline of the Lecture 1 2 Basics
What will be on the midterm?
 What will be on the midterm? CS 178, Spring 2014 Marc Levoy Computer Science Department Stanford University General information 2 Monday, 7-9pm, Cubberly Auditorium (School of Edu) closed book, no notes
What will be on the midterm? CS 178, Spring 2014 Marc Levoy Computer Science Department Stanford University General information 2 Monday, 7-9pm, Cubberly Auditorium (School of Edu) closed book, no notes
Projection. Readings. Szeliski 2.1. Wednesday, October 23, 13
 Projection Readings Szeliski 2.1 Projection Readings Szeliski 2.1 Müller-Lyer Illusion by Pravin Bhat Müller-Lyer Illusion by Pravin Bhat http://www.michaelbach.de/ot/sze_muelue/index.html Müller-Lyer
Projection Readings Szeliski 2.1 Projection Readings Szeliski 2.1 Müller-Lyer Illusion by Pravin Bhat Müller-Lyer Illusion by Pravin Bhat http://www.michaelbach.de/ot/sze_muelue/index.html Müller-Lyer
Prof. Feng Liu. Winter /09/2017
 Prof. Feng Liu Winter 2017 http://www.cs.pdx.edu/~fliu/courses/cs410/ 01/09/2017 Today Course overview Computer vision Admin. Info Visual Computing at PSU Image representation Color 2 Big Picture: Visual
Prof. Feng Liu Winter 2017 http://www.cs.pdx.edu/~fliu/courses/cs410/ 01/09/2017 Today Course overview Computer vision Admin. Info Visual Computing at PSU Image representation Color 2 Big Picture: Visual
Lecture 19: Depth Cameras. Kayvon Fatahalian CMU : Graphics and Imaging Architectures (Fall 2011)
") Lecture 19: Depth Cameras Kayvon Fatahalian CMU 15-869: Graphics and Imaging Architectures (Fall 2011) Continuing theme: computational photography Cheap cameras capture light, extensive processing produces
Lecture 19: Depth Cameras Kayvon Fatahalian CMU 15-869: Graphics and Imaging Architectures (Fall 2011) Continuing theme: computational photography Cheap cameras capture light, extensive processing produces
Computer Vision Lesson Plan
 Computer Vision Lesson Plan Overview Computer Vision Summary Computers today are being used to accomplish tasks that require using one or more of the five senses. Vision - seeing objects and identifying
Computer Vision Lesson Plan Overview Computer Vision Summary Computers today are being used to accomplish tasks that require using one or more of the five senses. Vision - seeing objects and identifying
Digital Image Processing. Lecture 1 (Introduction) Bu-Ali Sina University Computer Engineering Dep. Fall 2011
 Bu-Ali Sina University Computer Engineering Dep. Fall 2011") Digital Processing Lecture 1 (Introduction) Bu-Ali Sina University Computer Engineering Dep. Fall 2011 Introduction One picture is worth more than ten thousand p words Outline Syllabus References Course
Digital Processing Lecture 1 (Introduction) Bu-Ali Sina University Computer Engineering Dep. Fall 2011 Introduction One picture is worth more than ten thousand p words Outline Syllabus References Course
Introduction to DSP ECE-S352 Fall Quarter 2000 Matlab Project 1
 Objective: Introduction to DSP ECE-S352 Fall Quarter 2000 Matlab Project 1 This Matlab Project is an extension of the basic correlation theory presented in the course. It shows a practical application
Objective: Introduction to DSP ECE-S352 Fall Quarter 2000 Matlab Project 1 This Matlab Project is an extension of the basic correlation theory presented in the course. It shows a practical application
Cameras. Shrinking the aperture. Camera trial #1. Pinhole camera. Digital Visual Effects Yung-Yu Chuang. Put a piece of film in front of an object.
 Camera trial #1 Cameras Digital Visual Effects Yung-Yu Chuang scene film with slides by Fredo Durand, Brian Curless, Steve Seitz and Alexei Efros Put a piece of film in front of an object. Pinhole camera
Camera trial #1 Cameras Digital Visual Effects Yung-Yu Chuang scene film with slides by Fredo Durand, Brian Curless, Steve Seitz and Alexei Efros Put a piece of film in front of an object. Pinhole camera
Course Syllabus OSE 3200 Geometric Optics
 Course Syllabus OSE 3200 Geometric Optics Instructor: Dr. Kyle Renshaw Term: Fall 2016 Email: krenshaw@creol.ucf.edu Class Meeting Days: Monday/Wednesday Phone: 407-823-2807 Class Meeting Time: 10:30-11:45AM
Course Syllabus OSE 3200 Geometric Optics Instructor: Dr. Kyle Renshaw Term: Fall 2016 Email: krenshaw@creol.ucf.edu Class Meeting Days: Monday/Wednesday Phone: 407-823-2807 Class Meeting Time: 10:30-11:45AM
(15-862): Computational Photography
: Computational Photography") 15-463 (15-862): Computational Photography 15-463 (15-862): Computational Photography Staff Prof: Alexei Efros (efros@cs), 4207 NSH TA: Santosh Kumar Divvala (santosh@cs), TBA Web Page http://graphics.cs.cmu.edu/courses/15-463/
15-463 (15-862): Computational Photography 15-463 (15-862): Computational Photography Staff Prof: Alexei Efros (efros@cs), 4207 NSH TA: Santosh Kumar Divvala (santosh@cs), TBA Web Page http://graphics.cs.cmu.edu/courses/15-463/
(15-862): Computational Photography
: Computational Photography") 15-463 (15-862): Computational Photography Staff Prof: Alexei Efros (efros@cs), 4207 NSH TA: Mohit Gupta (mohitg@cs) Web Page http://graphics.cs.cmu.edu/courses/15-463/ Newsgroup: cmu.cs.class.cs463 Today
15-463 (15-862): Computational Photography Staff Prof: Alexei Efros (efros@cs), 4207 NSH TA: Mohit Gupta (mohitg@cs) Web Page http://graphics.cs.cmu.edu/courses/15-463/ Newsgroup: cmu.cs.class.cs463 Today
ECC419 IMAGE PROCESSING
 ECC419 IMAGE PROCESSING INTRODUCTION Image Processing Image processing is a subclass of signal processing concerned specifically with pictures. Digital Image Processing, process digital images by means
ECC419 IMAGE PROCESSING INTRODUCTION Image Processing Image processing is a subclass of signal processing concerned specifically with pictures. Digital Image Processing, process digital images by means
6.869 Advances in Computer Vision Spring 2010, A. Torralba
 6.869 Advances in Computer Vision Spring 2010, A. Torralba Due date: Wednesday, Feb 17, 2010 Problem set 1 You need to submit a report with brief descriptions of what you did. The most important part is
6.869 Advances in Computer Vision Spring 2010, A. Torralba Due date: Wednesday, Feb 17, 2010 Problem set 1 You need to submit a report with brief descriptions of what you did. The most important part is
Cameras. Outline. Pinhole camera. Camera trial #1. Pinhole camera Film camera Digital camera Video camera
 Outline Cameras Pinhole camera Film camera Digital camera Video camera Digital Visual Effects, Spring 2007 Yung-Yu Chuang 2007/3/6 with slides by Fredo Durand, Brian Curless, Steve Seitz and Alexei Efros
Outline Cameras Pinhole camera Film camera Digital camera Video camera Digital Visual Effects, Spring 2007 Yung-Yu Chuang 2007/3/6 with slides by Fredo Durand, Brian Curless, Steve Seitz and Alexei Efros
Beacon Island Report / Notes
 Beacon Island Report / Notes Paul Bourke, ivec@uwa, 17 February 2014 During my 2013 and 2014 visits to Beacon Island four general digital asset categories were acquired, they were: high resolution panoramic
Beacon Island Report / Notes Paul Bourke, ivec@uwa, 17 February 2014 During my 2013 and 2014 visits to Beacon Island four general digital asset categories were acquired, they were: high resolution panoramic
Computer Vision Introduction or
 Computer Vision Introduction http://www.ugrad.cs.jhu.edu/~cs461 or http://cirl.lcsr.jhu.edu/vision_syllabus Professor Hager http://www.cs.jhu.edu/~hager Outline for Today Outline and Organization of the
Computer Vision Introduction http://www.ugrad.cs.jhu.edu/~cs461 or http://cirl.lcsr.jhu.edu/vision_syllabus Professor Hager http://www.cs.jhu.edu/~hager Outline for Today Outline and Organization of the
Background. Computer Vision & Digital Image Processing. Improved Bartlane transmitted image. Example Bartlane transmitted image
 Background Computer Vision & Digital Image Processing Introduction to Digital Image Processing Interest comes from two primary backgrounds Improvement of pictorial information for human perception How
Background Computer Vision & Digital Image Processing Introduction to Digital Image Processing Interest comes from two primary backgrounds Improvement of pictorial information for human perception How
Computational Cameras. Rahul Raguram COMP
 Computational Cameras Rahul Raguram COMP 790-090 What is a computational camera? Camera optics Camera sensor 3D scene Traditional camera Final image Modified optics Camera sensor Image Compute 3D scene
Computational Cameras Rahul Raguram COMP 790-090 What is a computational camera? Camera optics Camera sensor 3D scene Traditional camera Final image Modified optics Camera sensor Image Compute 3D scene
Projection. Projection. Image formation. Müller-Lyer Illusion. Readings. Readings. Let s design a camera. Szeliski 2.1. Szeliski 2.
 Projection Projection Readings Szeliski 2.1 Readings Szeliski 2.1 Müller-Lyer Illusion Image formation object film by Pravin Bhat http://www.michaelbach.de/ot/sze_muelue/index.html Let s design a camera
Projection Projection Readings Szeliski 2.1 Readings Szeliski 2.1 Müller-Lyer Illusion Image formation object film by Pravin Bhat http://www.michaelbach.de/ot/sze_muelue/index.html Let s design a camera
Design of Temporally Dithered Codes for Increased Depth of Field in Structured Light Systems
 Design of Temporally Dithered Codes for Increased Depth of Field in Structured Light Systems Ricardo R. Garcia University of California, Berkeley Berkeley, CA rrgarcia@eecs.berkeley.edu Abstract In recent
Design of Temporally Dithered Codes for Increased Depth of Field in Structured Light Systems Ricardo R. Garcia University of California, Berkeley Berkeley, CA rrgarcia@eecs.berkeley.edu Abstract In recent
What is a digital image?
 Lec. 26, Thursday, Nov. 18 Digital imaging (not in the book) We are here Matrices and bit maps How many pixels How many shades? CCD Digital light projector Image compression: JPEG and MPEG Chapter 8: Binocular
Lec. 26, Thursday, Nov. 18 Digital imaging (not in the book) We are here Matrices and bit maps How many pixels How many shades? CCD Digital light projector Image compression: JPEG and MPEG Chapter 8: Binocular