Telling What-Is-What in Video. Gerard Medioni
|
|
|
- Preston Brooks
- 5 years ago
- Views:
Transcription
1 Telling What-Is-What in Video Gerard Medioni 1
2 Tracking Essential problem Establishes correspondences between elements in successive frames Basic problem easy 2
")

3 Many issues One target (pursuit) vs. A few objects vs. Lots of objects 3



4 More issues: motion type Rigid Articulated Non rigid (face expression) 4



5 Tag & Track - The problem Select any object and follow it in real time Object tracking problem Current work 5
6 Challenges Unknown type of object Changes in viewpoint Changes in lighting Cluttered background Running time vs 6
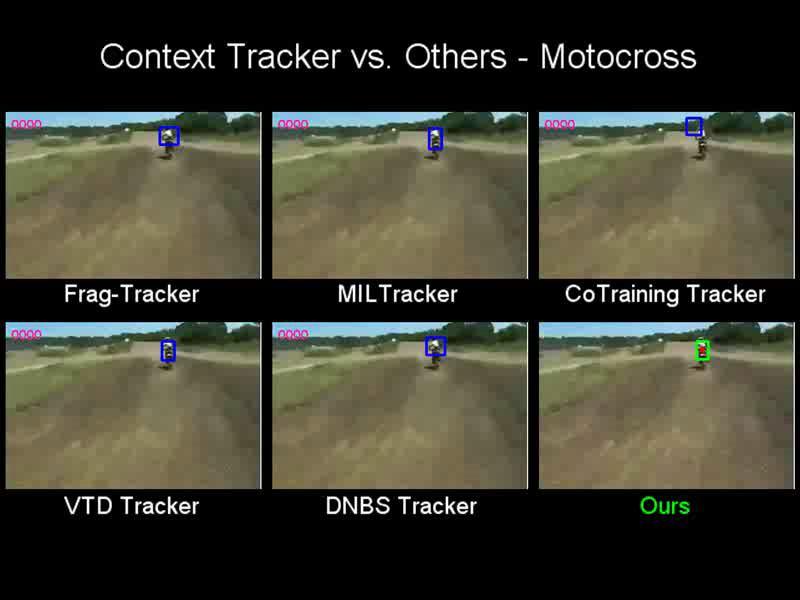
7 Context Tracker Motivation Context information is overlooked: online processing requirement, speed trade-off + Focus in building appearance model, do not take advantage of background info Requires very complicated Explore model Distracters when similar and objects pay appear. + Treat every region on the background in the same way. more attention to them 7

8 Context Tracker Motivation What else to explore? Supporters! 8




9 Context Tracker New input image Short-term tracking Detection Detector Tracking loop Online model evaluation distance... 9
 o High confidence")


10 Context Tracker Distracter Detection: o Pass the classifier (share the same classifier) o High confidence (look similar to our object) Tracking: o Same as tracking our target BUT will be killed when being lost or look different from our target o Heuristic data association: the higher confidence has higher priority in the association queue 10

11 Context Tracker Experiment settings 8 ferns and 4 6bitBP features Minimum search region 20x20 Number of maximum distracters 15, maximum supporters 40 System: 3.0 GHz (one core), 8GB Memory Runs fps depending on the number of distracters and supporters 11
12 12
13 13
14 Active Surveillance Combine Real Time tracker and Camera Control To keep object of interest in the field of view of the camera To zoom in (on the face) 14


15 Unknown type of object Challenges Changes in viewpoint Changes in lighting Tracking Cluttered background Running time vs Limited support from commercial cameras with discrete speed control due to the use of stepping motors. Delay because of communication through TCP/IP Network abrupt motion and motion blur 15 Control


16 Unknown type of object Challenges Changes in viewpoint Changes in lighting Tracking Cluttered background Running time Limited support from commercial cameras with discrete speed control due to the use of stepping motors. Delay because of communication through TCP/IP Network abrupt motion and motion blur 16 Control

17 Practical issues Challenges Pedestrians far away (face covers few pixels) 100% crop In long focal length, people may get out of FOV with a little movement. 17




18 Overview Tracking control loop Pedestrian detector Camera control Face detector Camera control Tracker No Face Tracked? Yes Tagged high resolution face sequences 18

19 Experimental setup Settings Sony PTZ Network Camera SNC-RZ30N with wireless card 14 levels of speed control for panning and 18 levels for tilting 25x optical zoom, 300x digital zoom Pan angle: -170 to +170 degrees Tilt angle: -90 to +25 degrees 19

20 Results 20


21 Tracking from security PTZ USC Cannot see the face from 100% cropped image Pedestrian detector Zooming (11x) Tracking Face track Frontal face detector 21
22 Tracking many objects Useful for persistent surveillance WAAS (Wide Area Aerial Surveillance) Very large images (60MPix-1GPix) 2 frames per second 22

23 Video Stabilization 23

24 Video Stabilization Results Close Up 24

25 Tracking Motivation Moving objects tell us a lot about the life in the geographic area Important for activity recognition Challenges Small number of pixels on target Large number of targets 25
26 Approach Goal: infer tracklets, each representing one object, over a sliding window of frames 4-8 second window (depends on frame rate) Input: object detections (from background subtraction or otherwise) 26

27 Results (CLIF 2006) 27
28 Tracking Results (CLIF 2006) Object Detection Rate False Alarm Rate Normalized Track Fragmentation ID Consistency Manually generated ground truth 168 tracks, 80 frames Low track fragmentation Low false alarm rate Efficient > 40 objects tracked at 2 fps Comparison with MCMC tracker (Yu 2009) Did not converge to a reasonable solution Requires good initialization Does not scale to our domain 28



29 Tracking VERY MANY Objects With the development of surveillance system, we will pay more and more attention to analyzing people in crowded scenes. (Sports, political gathering, etc.) 29


30 Crowded Scenes Challenges Hundreds of similar objects Cluttered background Small object size Occlusions Detect-then-track method fails: appearance based detector and background modeling based motion blob detector fail 30
31 Tracking Using Motion Patterns for Very Crowded Scenes We solve the problem of tracking in structured crowded scenes using Motion Structure Tracker (MST) MST is a combination of visual tracking, motion pattern learning and multi-target tracking. In MST, tracking and detection are performed jointly, and motion pattern information is integrated in both steps to enforce scene structure constraint. MST is initially used to track a single target, and further extended to solve a simplified version of the multi-target tracking problem. 31

 First frame (Detection &")
32 An Overview of Motion Structure Tracker Online Unsupervised Learning Motion Pattern Inference Tag Single Target Tracking Detect Similar Multi-Target Tracking Online Tracking (Detection & Tracking) First frame (Detection & Tracking) Input 32
33 Tag & Track Motion Structure Tracker for Single Target Tracking Results for Temporally Stationary Scenes (motion pattern do not change with time) Marathon-1 Marathon-2 Marathon-3 Sequence Method ATR ACLE Marathon-1 IVT Tracker P-N Tracker Ours 35.21% 56.16% 81.40% Marathon-2 IVT Tracker P-N Tracker Ours 33.47% 68.60% 73.12% Marathon-3 IVT Tracker P-N Tracker Ours 40.03% 67.16% 92.08% ATR : Average Track Ratiio ACLE: Average Center Location Error (ACLE)

34 Motion Structure Tracker for Single Target Tracking Results for Temporally Non-Stationary Scenes (motion pattern change with time) Sequence Method ATR ACLE Hongkong Motorbike Hongkong IVT Tracker P-N Tracker Ours IVT Tracker P-N Tracker Ours 27.63% 39.58% 62.31% 31.56% 47.22% 90.75% Motorbike ATR : Average Track Ratiio ACLE: Average Center Location Error (ACLE) 34




35 Motion Structure Tracker for Multi-Target Tracking Once a user labels a target in the first frame, find similar objects and track all of them Ours P-N Tracker Ground Truth Frame 1 Frame 71 Frame 141 Frame 211 Ours P-N Tracker Ground Truth Frame 1 Frame 31 Frame 61 Frame 91 Examples of tracking results comparison. First row: temporally stationary scenes. Second row: temporally non-stationary scenes. 35

36 36

37 Expression Analysis Understanding facial gestures By analyzing facial motions Facial motion induces detectable appearance changes Two classes of facial motions Global, rigid head motion From head pose variation Indicate subject s attention Local, nonrigid facial deformations From facial muscle activation Indicate subject s expression 37

38 Overview Face Sequences Facial Deformations Head Pose Training Database Recognition and Interpretation Expressions, Facial Gestures 38



39 Results ( Rigid tracking, real-time) Rotation, translation, & scale Fast motion Live webcam 39

40 Expression Analysis 40
41 Summary Tracking is a multi-faceted problem Many axes of complexity Resolution Number of objects Type of motion Significant progress being achieved 41
Face detection, face alignment, and face image parsing
 Lecture overview Face detection, face alignment, and face image parsing Brandon M. Smith Guest Lecturer, CS 534 Monday, October 21, 2013 Brief introduction to local features Face detection Face alignment
Lecture overview Face detection, face alignment, and face image parsing Brandon M. Smith Guest Lecturer, CS 534 Monday, October 21, 2013 Brief introduction to local features Face detection Face alignment
An Un-awarely Collected Real World Face Database: The ISL-Door Face Database
 An Un-awarely Collected Real World Face Database: The ISL-Door Face Database Hazım Kemal Ekenel, Rainer Stiefelhagen Interactive Systems Labs (ISL), Universität Karlsruhe (TH), Am Fasanengarten 5, 76131
An Un-awarely Collected Real World Face Database: The ISL-Door Face Database Hazım Kemal Ekenel, Rainer Stiefelhagen Interactive Systems Labs (ISL), Universität Karlsruhe (TH), Am Fasanengarten 5, 76131
IMAGES OF MOVING SUBJECTS
 IMAGES OF MOVING SUBJECTS Capturing images of a scene where one or more subjects are in motion Charles Ginsburgh - Fotoclave 2017 (November 4 th, 2017 ) As you view these Images, think about What the Story
IMAGES OF MOVING SUBJECTS Capturing images of a scene where one or more subjects are in motion Charles Ginsburgh - Fotoclave 2017 (November 4 th, 2017 ) As you view these Images, think about What the Story
Vehicle Detection, Tracking and Counting Objects For Traffic Surveillance System Using Raspberry-Pi
 Vehicle Detection, Tracking and Counting Objects For Traffic Surveillance System Using Raspberry-Pi MR. MAJETI V N HEMANTH KUMAR 1, MR. B.VASANTH 2 1 [M.Tech]/ECE, Student, EMBEDDED SYSTEMS (ES), JNTU
Vehicle Detection, Tracking and Counting Objects For Traffic Surveillance System Using Raspberry-Pi MR. MAJETI V N HEMANTH KUMAR 1, MR. B.VASANTH 2 1 [M.Tech]/ECE, Student, EMBEDDED SYSTEMS (ES), JNTU
Computer Vision Slides curtesy of Professor Gregory Dudek
 Computer Vision Slides curtesy of Professor Gregory Dudek Ioannis Rekleitis Why vision? Passive (emits nothing). Discreet. Energy efficient. Intuitive. Powerful (works well for us, right?) Long and short
Computer Vision Slides curtesy of Professor Gregory Dudek Ioannis Rekleitis Why vision? Passive (emits nothing). Discreet. Energy efficient. Intuitive. Powerful (works well for us, right?) Long and short
3D Interaction using Hand Motion Tracking. Srinath Sridhar Antti Oulasvirta
 3D Interaction using Hand Motion Tracking Srinath Sridhar Antti Oulasvirta EIT ICT Labs Smart Spaces Summer School 05-June-2013 Speaker Srinath Sridhar PhD Student Supervised by Prof. Dr. Christian Theobalt
3D Interaction using Hand Motion Tracking Srinath Sridhar Antti Oulasvirta EIT ICT Labs Smart Spaces Summer School 05-June-2013 Speaker Srinath Sridhar PhD Student Supervised by Prof. Dr. Christian Theobalt
FOCAL LENGTH CHANGE COMPENSATION FOR MONOCULAR SLAM
 FOCAL LENGTH CHANGE COMPENSATION FOR MONOCULAR SLAM Takafumi Taketomi Nara Institute of Science and Technology, Japan Janne Heikkilä University of Oulu, Finland ABSTRACT In this paper, we propose a method
FOCAL LENGTH CHANGE COMPENSATION FOR MONOCULAR SLAM Takafumi Taketomi Nara Institute of Science and Technology, Japan Janne Heikkilä University of Oulu, Finland ABSTRACT In this paper, we propose a method
Motion perception PSY 310 Greg Francis. Lecture 24. Aperture problem
 Motion perception PSY 310 Greg Francis Lecture 24 How do you see motion here? Aperture problem A detector that only sees part of a scene cannot precisely identify the motion direction or speed of an edge
Motion perception PSY 310 Greg Francis Lecture 24 How do you see motion here? Aperture problem A detector that only sees part of a scene cannot precisely identify the motion direction or speed of an edge
Real Time Video Analysis using Smart Phone Camera for Stroboscopic Image
 Real Time Video Analysis using Smart Phone Camera for Stroboscopic Image Somnath Mukherjee, Kritikal Solutions Pvt. Ltd. (India); Soumyajit Ganguly, International Institute of Information Technology (India)
Real Time Video Analysis using Smart Phone Camera for Stroboscopic Image Somnath Mukherjee, Kritikal Solutions Pvt. Ltd. (India); Soumyajit Ganguly, International Institute of Information Technology (India)
A Vehicular Visual Tracking System Incorporating Global Positioning System
 A Vehicular Visual Tracking System Incorporating Global Positioning System Hsien-Chou Liao and Yu-Shiang Wang Abstract Surveillance system is widely used in the traffic monitoring. The deployment of cameras
A Vehicular Visual Tracking System Incorporating Global Positioning System Hsien-Chou Liao and Yu-Shiang Wang Abstract Surveillance system is widely used in the traffic monitoring. The deployment of cameras
Lecture 1 Introduction to Computer Vision. Lin ZHANG, PhD School of Software Engineering, Tongji University Spring 2014
 Lecture 1 Introduction to Computer Vision Lin ZHANG, PhD School of Software Engineering, Tongji University Spring 2014 Course Info Contact Information Room 314, Jishi Building Email: cslinzhang@tongji.edu.cn
Lecture 1 Introduction to Computer Vision Lin ZHANG, PhD School of Software Engineering, Tongji University Spring 2014 Course Info Contact Information Room 314, Jishi Building Email: cslinzhang@tongji.edu.cn
Lenses, exposure, and (de)focus
focus") Lenses, exposure, and (de)focus http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 15 Course announcements Homework 4 is out. - Due October 26
Lenses, exposure, and (de)focus http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 15 Course announcements Homework 4 is out. - Due October 26
OPPORTUNISTIC TRAFFIC SENSING USING EXISTING VIDEO SOURCES (PHASE II)
") CIVIL ENGINEERING STUDIES Illinois Center for Transportation Series No. 17-003 UILU-ENG-2017-2003 ISSN: 0197-9191 OPPORTUNISTIC TRAFFIC SENSING USING EXISTING VIDEO SOURCES (PHASE II) Prepared By Jakob
CIVIL ENGINEERING STUDIES Illinois Center for Transportation Series No. 17-003 UILU-ENG-2017-2003 ISSN: 0197-9191 OPPORTUNISTIC TRAFFIC SENSING USING EXISTING VIDEO SOURCES (PHASE II) Prepared By Jakob
Real-Time Face Detection and Tracking for High Resolution Smart Camera System
 Digital Image Computing Techniques and Applications Real-Time Face Detection and Tracking for High Resolution Smart Camera System Y. M. Mustafah a,b, T. Shan a, A. W. Azman a,b, A. Bigdeli a, B. C. Lovell
Digital Image Computing Techniques and Applications Real-Time Face Detection and Tracking for High Resolution Smart Camera System Y. M. Mustafah a,b, T. Shan a, A. W. Azman a,b, A. Bigdeli a, B. C. Lovell
Today I t n d ro ucti tion to computer vision Course overview Course requirements
 COMP 776: Computer Vision Today Introduction ti to computer vision i Course overview Course requirements The goal of computer vision To extract t meaning from pixels What we see What a computer sees Source:
COMP 776: Computer Vision Today Introduction ti to computer vision i Course overview Course requirements The goal of computer vision To extract t meaning from pixels What we see What a computer sees Source:
Title Goes Here Algorithms for Biometric Authentication
 Title Goes Here Algorithms for Biometric Authentication February 2003 Vijayakumar Bhagavatula 1 Outline Motivation Challenges Technology: Correlation filters Example results Summary 2 Motivation Recognizing
Title Goes Here Algorithms for Biometric Authentication February 2003 Vijayakumar Bhagavatula 1 Outline Motivation Challenges Technology: Correlation filters Example results Summary 2 Motivation Recognizing
Today. CS 395T Visual Recognition. Course content. Administration. Expectations. Paper reviews
 Today CS 395T Visual Recognition Course logistics Overview Volunteers, prep for next week Thursday, January 18 Administration Class: Tues / Thurs 12:30-2 PM Instructor: Kristen Grauman grauman at cs.utexas.edu
Today CS 395T Visual Recognition Course logistics Overview Volunteers, prep for next week Thursday, January 18 Administration Class: Tues / Thurs 12:30-2 PM Instructor: Kristen Grauman grauman at cs.utexas.edu
Moving Object Detection for Intelligent Visual Surveillance
 Moving Object Detection for Intelligent Visual Surveillance Ph.D. Candidate: Jae Kyu Suhr Advisor : Prof. Jaihie Kim April 29, 2011 Contents 1 Motivation & Contributions 2 Background Compensation for PTZ
Moving Object Detection for Intelligent Visual Surveillance Ph.D. Candidate: Jae Kyu Suhr Advisor : Prof. Jaihie Kim April 29, 2011 Contents 1 Motivation & Contributions 2 Background Compensation for PTZ
Photographing Long Scenes with Multiviewpoint
 Photographing Long Scenes with Multiviewpoint Panoramas A. Agarwala, M. Agrawala, M. Cohen, D. Salesin, R. Szeliski Presenter: Stacy Hsueh Discussant: VasilyVolkov Motivation Want an image that shows an
Photographing Long Scenes with Multiviewpoint Panoramas A. Agarwala, M. Agrawala, M. Cohen, D. Salesin, R. Szeliski Presenter: Stacy Hsueh Discussant: VasilyVolkov Motivation Want an image that shows an
High Level Computer Vision. Introduction - April 16, Bernt Schiele & Mario Fritz MPI Informatics and Saarland University, Saarbrücken, Germany
 Perceptual and Sensory Augmented Computing High Level Computer Vision Introduction - April 16, 2014 MPI Informatics and Saarland University, Saarbrücken, Germany http://www.d2.mpi-inf.mpg.de/cv Computer
Perceptual and Sensory Augmented Computing High Level Computer Vision Introduction - April 16, 2014 MPI Informatics and Saarland University, Saarbrücken, Germany http://www.d2.mpi-inf.mpg.de/cv Computer
Intro to Digital Compositions: Week One Physical Design
 Instructor: Roger Buchanan Intro to Digital Compositions: Week One Physical Design Your notes are available at: www.thenerdworks.com Please be sure to charge your camera battery, and bring spares if possible.
Instructor: Roger Buchanan Intro to Digital Compositions: Week One Physical Design Your notes are available at: www.thenerdworks.com Please be sure to charge your camera battery, and bring spares if possible.
Face Detection System on Ada boost Algorithm Using Haar Classifiers
 Vol.2, Issue.6, Nov-Dec. 2012 pp-3996-4000 ISSN: 2249-6645 Face Detection System on Ada boost Algorithm Using Haar Classifiers M. Gopi Krishna, A. Srinivasulu, Prof (Dr.) T.K.Basak 1, 2 Department of Electronics
Vol.2, Issue.6, Nov-Dec. 2012 pp-3996-4000 ISSN: 2249-6645 Face Detection System on Ada boost Algorithm Using Haar Classifiers M. Gopi Krishna, A. Srinivasulu, Prof (Dr.) T.K.Basak 1, 2 Department of Electronics
Pose Invariant Face Recognition
 Pose Invariant Face Recognition Fu Jie Huang Zhihua Zhou Hong-Jiang Zhang Tsuhan Chen Electrical and Computer Engineering Department Carnegie Mellon University jhuangfu@cmu.edu State Key Lab for Novel
Pose Invariant Face Recognition Fu Jie Huang Zhihua Zhou Hong-Jiang Zhang Tsuhan Chen Electrical and Computer Engineering Department Carnegie Mellon University jhuangfu@cmu.edu State Key Lab for Novel
Image Analysis & Searching
 Image Analysis & Searching 1 Searching Photos Look for photos like this one: Look for beach photos Look for photos taken Sept. 15, 2000 Look for photos with: Look for photos with Aunt Thelma 2 Annotating
Image Analysis & Searching 1 Searching Photos Look for photos like this one: Look for beach photos Look for photos taken Sept. 15, 2000 Look for photos with: Look for photos with Aunt Thelma 2 Annotating
A Vehicular Visual Tracking System Incorporating Global Positioning System
 A Vehicular Visual Tracking System Incorporating Global Positioning System Hsien-Chou Liao and Yu-Shiang Wang Abstract Surveillance system is widely used in the traffic monitoring. The deployment of cameras
A Vehicular Visual Tracking System Incorporating Global Positioning System Hsien-Chou Liao and Yu-Shiang Wang Abstract Surveillance system is widely used in the traffic monitoring. The deployment of cameras
A Vehicular Visual Tracking System Incorporating Global Positioning System
 Vol:5, :6, 20 A Vehicular Visual Tracking System Incorporating Global Positioning System Hsien-Chou Liao and Yu-Shiang Wang International Science Index, Computer and Information Engineering Vol:5, :6,
Vol:5, :6, 20 A Vehicular Visual Tracking System Incorporating Global Positioning System Hsien-Chou Liao and Yu-Shiang Wang International Science Index, Computer and Information Engineering Vol:5, :6,
Insight VCS: Maya User s Guide
 Insight VCS: Maya User s Guide Version 1.2 April 8, 2011 NaturalPoint Corporation 33872 SE Eastgate Circle Corvallis OR 97339 Copyright 2011 NaturalPoint Corporation. All rights reserved. NaturalPoint
Insight VCS: Maya User s Guide Version 1.2 April 8, 2011 NaturalPoint Corporation 33872 SE Eastgate Circle Corvallis OR 97339 Copyright 2011 NaturalPoint Corporation. All rights reserved. NaturalPoint
SIS63-Building the Future-Advanced Integrated Safety Applications: interactive Perception platform and fusion modules results
 SIS63-Building the Future-Advanced Integrated Safety Applications: interactive Perception platform and fusion modules results Angelos Amditis (ICCS) and Lali Ghosh (DEL) 18 th October 2013 20 th ITS World
SIS63-Building the Future-Advanced Integrated Safety Applications: interactive Perception platform and fusion modules results Angelos Amditis (ICCS) and Lali Ghosh (DEL) 18 th October 2013 20 th ITS World
Contents Preface Micro-Doppler Signatures Review, Challenges, and Perspectives Phenomenology of Radar Micro-Doppler Signatures
 Contents Preface xi 1 Micro-Doppler Signatures Review, Challenges, and Perspectives 1 1.1 Introduction 1 1.2 Review of Micro-Doppler Effect in Radar 2 1.2.1 Micro-Doppler Signatures of Rigid Body Motion
Contents Preface xi 1 Micro-Doppler Signatures Review, Challenges, and Perspectives 1 1.1 Introduction 1 1.2 Review of Micro-Doppler Effect in Radar 2 1.2.1 Micro-Doppler Signatures of Rigid Body Motion
Lecture 19: Depth Cameras. Kayvon Fatahalian CMU : Graphics and Imaging Architectures (Fall 2011)
") Lecture 19: Depth Cameras Kayvon Fatahalian CMU 15-869: Graphics and Imaging Architectures (Fall 2011) Continuing theme: computational photography Cheap cameras capture light, extensive processing produces
Lecture 19: Depth Cameras Kayvon Fatahalian CMU 15-869: Graphics and Imaging Architectures (Fall 2011) Continuing theme: computational photography Cheap cameras capture light, extensive processing produces
Table of Contents. 1.Choosing your Camera. 2. Understanding your Camera Which Camera DSLR vs Compact...8
 1.Choosing your Camera 1.3. Which Camera...7 1.4. DSLR vs Compact...8 1.5. Best entry level DSLR's...9 1.6. Best Compact Cameras...10 1.7.Best Hybrid Camera...11 2. Understanding your Camera 2.1 Introducing
1.Choosing your Camera 1.3. Which Camera...7 1.4. DSLR vs Compact...8 1.5. Best entry level DSLR's...9 1.6. Best Compact Cameras...10 1.7.Best Hybrid Camera...11 2. Understanding your Camera 2.1 Introducing
What was the first gestural interface?
 stanford hci group / cs247 Human-Computer Interaction Design Studio What was the first gestural interface? 15 January 2013 http://cs247.stanford.edu Theremin Myron Krueger 1 Myron Krueger There were things
stanford hci group / cs247 Human-Computer Interaction Design Studio What was the first gestural interface? 15 January 2013 http://cs247.stanford.edu Theremin Myron Krueger 1 Myron Krueger There were things
Image stitching. Image stitching. Video summarization. Applications of image stitching. Stitching = alignment + blending. geometrical registration
 Image stitching Stitching = alignment + blending Image stitching geometrical registration photometric registration Digital Visual Effects, Spring 2006 Yung-Yu Chuang 2005/3/22 with slides by Richard Szeliski,
Image stitching Stitching = alignment + blending Image stitching geometrical registration photometric registration Digital Visual Effects, Spring 2006 Yung-Yu Chuang 2005/3/22 with slides by Richard Szeliski,
TAKING GREAT PICTURES. A Modest Introduction
 TAKING GREAT PICTURES A Modest Introduction HOW TO CHOOSE THE RIGHT CAMERA EQUIPMENT WE ARE NOW LIVING THROUGH THE GOLDEN AGE OF PHOTOGRAPHY Rapid innovation gives us much better cameras and photo software...
TAKING GREAT PICTURES A Modest Introduction HOW TO CHOOSE THE RIGHT CAMERA EQUIPMENT WE ARE NOW LIVING THROUGH THE GOLDEN AGE OF PHOTOGRAPHY Rapid innovation gives us much better cameras and photo software...
Computer Vision. The Pinhole Camera Model
 Computer Vision The Pinhole Camera Model Filippo Bergamasco (filippo.bergamasco@unive.it) http://www.dais.unive.it/~bergamasco DAIS, Ca Foscari University of Venice Academic year 2017/2018 Imaging device
Computer Vision The Pinhole Camera Model Filippo Bergamasco (filippo.bergamasco@unive.it) http://www.dais.unive.it/~bergamasco DAIS, Ca Foscari University of Venice Academic year 2017/2018 Imaging device
Unit 1: Image Formation
 Unit 1: Image Formation 1. Geometry 2. Optics 3. Photometry 4. Sensor Readings Szeliski 2.1-2.3 & 6.3.5 1 Physical parameters of image formation Geometric Type of projection Camera pose Optical Sensor
Unit 1: Image Formation 1. Geometry 2. Optics 3. Photometry 4. Sensor Readings Szeliski 2.1-2.3 & 6.3.5 1 Physical parameters of image formation Geometric Type of projection Camera pose Optical Sensor
Optical image stabilization (IS)
") Optical image stabilization (IS) CS 178, Spring 2011 Marc Levoy Computer Science Department Stanford University Outline! what are the causes of camera shake? how can you avoid it (without having an IS
Optical image stabilization (IS) CS 178, Spring 2011 Marc Levoy Computer Science Department Stanford University Outline! what are the causes of camera shake? how can you avoid it (without having an IS
Perception. Introduction to HRI Simmons & Nourbakhsh Spring 2015
 Perception Introduction to HRI Simmons & Nourbakhsh Spring 2015 Perception my goals What is the state of the art boundary? Where might we be in 5-10 years? The Perceptual Pipeline The classical approach:
Perception Introduction to HRI Simmons & Nourbakhsh Spring 2015 Perception my goals What is the state of the art boundary? Where might we be in 5-10 years? The Perceptual Pipeline The classical approach:
Tips for a correct functioning of Face Recognition technology. FacePhi Face Recognition.
 Tips for a correct functioning of Face Recognition technology FacePhi Face Recognition www.facephi.com This document is property of FacePhi Biometria S.A. All rights reserved. Total or partial copy of
Tips for a correct functioning of Face Recognition technology FacePhi Face Recognition www.facephi.com This document is property of FacePhi Biometria S.A. All rights reserved. Total or partial copy of
Chapter 6 Face Recognition at a Distance: System Issues
 Chapter 6 Face Recognition at a Distance: System Issues Meng Ao, Dong Yi, Zhen Lei, and Stan Z. Li Abstract Face recognition at a distance (FRAD) is one of the most challenging forms of face recognition
Chapter 6 Face Recognition at a Distance: System Issues Meng Ao, Dong Yi, Zhen Lei, and Stan Z. Li Abstract Face recognition at a distance (FRAD) is one of the most challenging forms of face recognition
Optical image stabilization (IS)
") Optical image stabilization (IS) CS 178, Spring 2010 Marc Levoy Computer Science Department Stanford University Outline! what are the causes of camera shake? how can you avoid it (without having an IS
Optical image stabilization (IS) CS 178, Spring 2010 Marc Levoy Computer Science Department Stanford University Outline! what are the causes of camera shake? how can you avoid it (without having an IS
Lifelog-Style Experience Recording and Analysis for Group Activities
 Lifelog-Style Experience Recording and Analysis for Group Activities Yuichi Nakamura Academic Center for Computing and Media Studies, Kyoto University Lifelog and Grouplog for Experience Integration entering
Lifelog-Style Experience Recording and Analysis for Group Activities Yuichi Nakamura Academic Center for Computing and Media Studies, Kyoto University Lifelog and Grouplog for Experience Integration entering
6.098 Digital and Computational Photography Advanced Computational Photography. Bill Freeman Frédo Durand MIT - EECS
 6.098 Digital and Computational Photography 6.882 Advanced Computational Photography Bill Freeman Frédo Durand MIT - EECS Administrivia PSet 1 is out Due Thursday February 23 Digital SLR initiation? During
6.098 Digital and Computational Photography 6.882 Advanced Computational Photography Bill Freeman Frédo Durand MIT - EECS Administrivia PSet 1 is out Due Thursday February 23 Digital SLR initiation? During
SUPER RESOLUTION INTRODUCTION
 SUPER RESOLUTION Jnanavardhini - Online MultiDisciplinary Research Journal Ms. Amalorpavam.G Assistant Professor, Department of Computer Sciences, Sambhram Academy of Management. Studies, Bangalore Abstract:-
SUPER RESOLUTION Jnanavardhini - Online MultiDisciplinary Research Journal Ms. Amalorpavam.G Assistant Professor, Department of Computer Sciences, Sambhram Academy of Management. Studies, Bangalore Abstract:-
Object Tracking Toolbox
 Project no. IST-34107 Project acronym: ARTTS Project title: Action Recognition and Tracking based on Time-of-flight Sensors Object Tracking Toolbox Duration of the project: October 2006 September 2009
Project no. IST-34107 Project acronym: ARTTS Project title: Action Recognition and Tracking based on Time-of-flight Sensors Object Tracking Toolbox Duration of the project: October 2006 September 2009
Interacting within Virtual Worlds (based on talks by Greg Welch and Mark Mine)
") Interacting within Virtual Worlds (based on talks by Greg Welch and Mark Mine) Presentation Working in a virtual world Interaction principles Interaction examples Why VR in the First Place? Direct perception
Interacting within Virtual Worlds (based on talks by Greg Welch and Mark Mine) Presentation Working in a virtual world Interaction principles Interaction examples Why VR in the First Place? Direct perception
Distinguishing Mislabeled Data from Correctly Labeled Data in Classifier Design
 Distinguishing Mislabeled Data from Correctly Labeled Data in Classifier Design Sundara Venkataraman, Dimitris Metaxas, Dmitriy Fradkin, Casimir Kulikowski, Ilya Muchnik DCS, Rutgers University, NJ November
Distinguishing Mislabeled Data from Correctly Labeled Data in Classifier Design Sundara Venkataraman, Dimitris Metaxas, Dmitriy Fradkin, Casimir Kulikowski, Ilya Muchnik DCS, Rutgers University, NJ November
Image Formation. Dr. Gerhard Roth. COMP 4102A Winter 2015 Version 3
 Image Formation Dr. Gerhard Roth COMP 4102A Winter 2015 Version 3 1 Image Formation Two type of images Intensity image encodes light intensities (passive sensor) Range (depth) image encodes shape and distance
Image Formation Dr. Gerhard Roth COMP 4102A Winter 2015 Version 3 1 Image Formation Two type of images Intensity image encodes light intensities (passive sensor) Range (depth) image encodes shape and distance
Computational Camera & Photography: Coded Imaging
 Computational Camera & Photography: Coded Imaging Camera Culture Ramesh Raskar MIT Media Lab http://cameraculture.media.mit.edu/ Image removed due to copyright restrictions. See Fig. 1, Eight major types
Computational Camera & Photography: Coded Imaging Camera Culture Ramesh Raskar MIT Media Lab http://cameraculture.media.mit.edu/ Image removed due to copyright restrictions. See Fig. 1, Eight major types
Driver Assistance for "Keeping Hands on the Wheel and Eyes on the Road"
 ICVES 2009 Driver Assistance for "Keeping Hands on the Wheel and Eyes on the Road" Cuong Tran and Mohan Manubhai Trivedi Laboratory for Intelligent and Safe Automobiles (LISA) University of California
ICVES 2009 Driver Assistance for "Keeping Hands on the Wheel and Eyes on the Road" Cuong Tran and Mohan Manubhai Trivedi Laboratory for Intelligent and Safe Automobiles (LISA) University of California
Computer Vision in Human-Computer Interaction
 Invited talk in 2010 Autumn Seminar and Meeting of Pattern Recognition Society of Finland, M/S Baltic Princess, 26.11.2010 Computer Vision in Human-Computer Interaction Matti Pietikäinen Machine Vision
Invited talk in 2010 Autumn Seminar and Meeting of Pattern Recognition Society of Finland, M/S Baltic Princess, 26.11.2010 Computer Vision in Human-Computer Interaction Matti Pietikäinen Machine Vision
Practical Image and Video Processing Using MATLAB
 Practical Image and Video Processing Using MATLAB Chapter 1 Introduction and overview What will we learn? What is image processing? What are the main applications of image processing? What is an image?
Practical Image and Video Processing Using MATLAB Chapter 1 Introduction and overview What will we learn? What is image processing? What are the main applications of image processing? What is an image?
Facial Biometric For Performance. Best Practice Guide
 Facial Biometric For Performance Best Practice Guide Foreword State-of-the-art face recognition systems under controlled lighting condition are proven to be very accurate with unparalleled user-friendliness,
Facial Biometric For Performance Best Practice Guide Foreword State-of-the-art face recognition systems under controlled lighting condition are proven to be very accurate with unparalleled user-friendliness,
Cooperative Tracking with Mobile Robots and Networked Embedded Sensors
 Institutue for Robotics and Intelligent Systems (IRIS) Technical Report IRIS-01-404 University of Southern California, 2001 Cooperative Tracking with Mobile Robots and Networked Embedded Sensors Boyoon
Institutue for Robotics and Intelligent Systems (IRIS) Technical Report IRIS-01-404 University of Southern California, 2001 Cooperative Tracking with Mobile Robots and Networked Embedded Sensors Boyoon
ALMALENCE SUPER SENSOR. A software component with an effect of increasing the pixel size and number of pixels in the sensor
 ALMALENCE SUPER SENSOR A software component with an effect of increasing the pixel size and number of pixels in the sensor MOBILE CAMERA: SMALL SENSOR AND TINY LENS Insufficient resolution, low light performance,
ALMALENCE SUPER SENSOR A software component with an effect of increasing the pixel size and number of pixels in the sensor MOBILE CAMERA: SMALL SENSOR AND TINY LENS Insufficient resolution, low light performance,
Perception platform and fusion modules results. Angelos Amditis - ICCS and Lali Ghosh - DEL interactive final event
 Perception platform and fusion modules results Angelos Amditis - ICCS and Lali Ghosh - DEL interactive final event 20 th -21 st November 2013 Agenda Introduction Environment Perception in Intelligent Transport
Perception platform and fusion modules results Angelos Amditis - ICCS and Lali Ghosh - DEL interactive final event 20 th -21 st November 2013 Agenda Introduction Environment Perception in Intelligent Transport
EFFICIENT ATTENDANCE MANAGEMENT SYSTEM USING FACE DETECTION AND RECOGNITION
 EFFICIENT ATTENDANCE MANAGEMENT SYSTEM USING FACE DETECTION AND RECOGNITION 1 Arun.A.V, 2 Bhatath.S, 3 Chethan.N, 4 Manmohan.C.M, 5 Hamsaveni M 1,2,3,4,5 Department of Computer Science and Engineering,
EFFICIENT ATTENDANCE MANAGEMENT SYSTEM USING FACE DETECTION AND RECOGNITION 1 Arun.A.V, 2 Bhatath.S, 3 Chethan.N, 4 Manmohan.C.M, 5 Hamsaveni M 1,2,3,4,5 Department of Computer Science and Engineering,
Recognizing Words in Scenes with a Head-Mounted Eye-Tracker
 Recognizing Words in Scenes with a Head-Mounted Eye-Tracker Takuya Kobayashi, Takumi Toyama, Faisal Shafait, Masakazu Iwamura, Koichi Kise and Andreas Dengel Graduate School of Engineering Osaka Prefecture
Recognizing Words in Scenes with a Head-Mounted Eye-Tracker Takuya Kobayashi, Takumi Toyama, Faisal Shafait, Masakazu Iwamura, Koichi Kise and Andreas Dengel Graduate School of Engineering Osaka Prefecture
Main Subject Detection of Image by Cropping Specific Sharp Area
 Main Subject Detection of Image by Cropping Specific Sharp Area FOTIOS C. VAIOULIS 1, MARIOS S. POULOS 1, GEORGE D. BOKOS 1 and NIKOLAOS ALEXANDRIS 2 Department of Archives and Library Science Ionian University
Main Subject Detection of Image by Cropping Specific Sharp Area FOTIOS C. VAIOULIS 1, MARIOS S. POULOS 1, GEORGE D. BOKOS 1 and NIKOLAOS ALEXANDRIS 2 Department of Archives and Library Science Ionian University
Aimetis Outdoor Object Tracker. 2.0 User Guide
 Aimetis Outdoor Object Tracker 0 User Guide Contents Contents Introduction...3 Installation... 4 Requirements... 4 Install Outdoor Object Tracker...4 Open Outdoor Object Tracker... 4 Add a license... 5...
Aimetis Outdoor Object Tracker 0 User Guide Contents Contents Introduction...3 Installation... 4 Requirements... 4 Install Outdoor Object Tracker...4 Open Outdoor Object Tracker... 4 Add a license... 5...
Ayonix-APS. World s fastest 3D Face surveillance application. Feb.13 th, 2017
 Ayonix-APS World s fastest 3D Face surveillance application Feb.13 th, 2017 What is APS Ayonix Public Security(APS) is a All-in-one Face recognition product which recognizes people from IP cameras, Image
Ayonix-APS World s fastest 3D Face surveillance application Feb.13 th, 2017 What is APS Ayonix Public Security(APS) is a All-in-one Face recognition product which recognizes people from IP cameras, Image
Pilot: Device-free Indoor Localization Using Channel State Information
 ICDCS 2013 Pilot: Device-free Indoor Localization Using Channel State Information Jiang Xiao, Kaishun Wu, Youwen Yi, Lu Wang, Lionel M. Ni Department of Computer Science and Engineering Hong Kong University
ICDCS 2013 Pilot: Device-free Indoor Localization Using Channel State Information Jiang Xiao, Kaishun Wu, Youwen Yi, Lu Wang, Lionel M. Ni Department of Computer Science and Engineering Hong Kong University
6.A44 Computational Photography
 Add date: Friday 6.A44 Computational Photography Depth of Field Frédo Durand We allow for some tolerance What happens when we close the aperture by two stop? Aperture diameter is divided by two is doubled
Add date: Friday 6.A44 Computational Photography Depth of Field Frédo Durand We allow for some tolerance What happens when we close the aperture by two stop? Aperture diameter is divided by two is doubled
Computational Approaches to Cameras
 Computational Approaches to Cameras 11/16/17 Magritte, The False Mirror (1935) Computational Photography Derek Hoiem, University of Illinois Announcements Final project proposal due Monday (see links on
Computational Approaches to Cameras 11/16/17 Magritte, The False Mirror (1935) Computational Photography Derek Hoiem, University of Illinois Announcements Final project proposal due Monday (see links on
Spring 2018 CS543 / ECE549 Computer Vision. Course webpage URL:
 Spring 2018 CS543 / ECE549 Computer Vision Course webpage URL: http://slazebni.cs.illinois.edu/spring18/ The goal of computer vision To extract meaning from pixels What we see What a computer sees Source:
Spring 2018 CS543 / ECE549 Computer Vision Course webpage URL: http://slazebni.cs.illinois.edu/spring18/ The goal of computer vision To extract meaning from pixels What we see What a computer sees Source:
Background Pixel Classification for Motion Detection in Video Image Sequences
 Background Pixel Classification for Motion Detection in Video Image Sequences P. Gil-Jiménez, S. Maldonado-Bascón, R. Gil-Pita, and H. Gómez-Moreno Dpto. de Teoría de la señal y Comunicaciones. Universidad
Background Pixel Classification for Motion Detection in Video Image Sequences P. Gil-Jiménez, S. Maldonado-Bascón, R. Gil-Pita, and H. Gómez-Moreno Dpto. de Teoría de la señal y Comunicaciones. Universidad
A Survey on Different Face Detection Algorithms in Image Processing
 A Survey on Different Face Detection Algorithms in Image Processing Doyle Fermi 1, Faiza N B 2, Ranjana Radhakrishnan 3, Swathi S Kartha 4, Anjali S 5 U.G. Student, Department of Computer Engineering,
A Survey on Different Face Detection Algorithms in Image Processing Doyle Fermi 1, Faiza N B 2, Ranjana Radhakrishnan 3, Swathi S Kartha 4, Anjali S 5 U.G. Student, Department of Computer Engineering,
Autonomous Face Recognition
 Autonomous Face Recognition CymbIoT Autonomous Face Recognition SECURITYI URBAN SOLUTIONSI RETAIL In recent years, face recognition technology has emerged as a powerful tool for law enforcement and on-site
Autonomous Face Recognition CymbIoT Autonomous Face Recognition SECURITYI URBAN SOLUTIONSI RETAIL In recent years, face recognition technology has emerged as a powerful tool for law enforcement and on-site
Toward an Augmented Reality System for Violin Learning Support
 Toward an Augmented Reality System for Violin Learning Support Hiroyuki Shiino, François de Sorbier, and Hideo Saito Graduate School of Science and Technology, Keio University, Yokohama, Japan {shiino,fdesorbi,saito}@hvrl.ics.keio.ac.jp
Toward an Augmented Reality System for Violin Learning Support Hiroyuki Shiino, François de Sorbier, and Hideo Saito Graduate School of Science and Technology, Keio University, Yokohama, Japan {shiino,fdesorbi,saito}@hvrl.ics.keio.ac.jp
Automatic correction of timestamp and location information in digital images
 Technical Disclosure Commons Defensive Publications Series August 17, 2017 Automatic correction of timestamp and location information in digital images Thomas Deselaers Daniel Keysers Follow this and additional
Technical Disclosure Commons Defensive Publications Series August 17, 2017 Automatic correction of timestamp and location information in digital images Thomas Deselaers Daniel Keysers Follow this and additional
CONTENTS INTRODUCTION ACTIVATING VCA LICENSE CONFIGURATION...
 VCA VCA Installation and Configuration manual 2 Contents CONTENTS... 2 1 INTRODUCTION... 3 2 ACTIVATING VCA LICENSE... 6 3 CONFIGURATION... 10 3.1 VCA... 10 3.1.1 Camera Parameters... 11 3.1.2 VCA Parameters...
VCA VCA Installation and Configuration manual 2 Contents CONTENTS... 2 1 INTRODUCTION... 3 2 ACTIVATING VCA LICENSE... 6 3 CONFIGURATION... 10 3.1 VCA... 10 3.1.1 Camera Parameters... 11 3.1.2 VCA Parameters...
VIDEO DATABASE FOR FACE RECOGNITION
 VIDEO DATABASE FOR FACE RECOGNITION P. Bambuch, T. Malach, J. Malach EBIS, spol. s r.o. Abstract This paper deals with video sequences database design and assembly for face recognition system working under
VIDEO DATABASE FOR FACE RECOGNITION P. Bambuch, T. Malach, J. Malach EBIS, spol. s r.o. Abstract This paper deals with video sequences database design and assembly for face recognition system working under
COMP 776: Computer Vision
 COMP 776: Computer Vision Basic Info Instructor: Svetlana Lazebnik (lazebnik@cs.unc.edu) Office hours: By appointment, FB 244 Textbook (recommended): Forsyth & Ponce, Computer Vision: A Modern Approach
COMP 776: Computer Vision Basic Info Instructor: Svetlana Lazebnik (lazebnik@cs.unc.edu) Office hours: By appointment, FB 244 Textbook (recommended): Forsyth & Ponce, Computer Vision: A Modern Approach
Homographies and Mosaics
 Homographies and Mosaics Jeffrey Martin (jeffrey-martin.com) with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2011 Why Mosaic? Are
Homographies and Mosaics Jeffrey Martin (jeffrey-martin.com) with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2011 Why Mosaic? Are
Intelligent Traffic Sign Detector: Adaptive Learning Based on Online Gathering of Training Samples
 2011 IEEE Intelligent Vehicles Symposium (IV) Baden-Baden, Germany, June 5-9, 2011 Intelligent Traffic Sign Detector: Adaptive Learning Based on Online Gathering of Training Samples Daisuke Deguchi, Mitsunori
2011 IEEE Intelligent Vehicles Symposium (IV) Baden-Baden, Germany, June 5-9, 2011 Intelligent Traffic Sign Detector: Adaptive Learning Based on Online Gathering of Training Samples Daisuke Deguchi, Mitsunori
Lecture 1 Introduction to Computer Vision. Lin ZHANG, PhD School of Software Engineering, Tongji University Spring 2015
 Lecture 1 Introduction to Computer Vision Lin ZHANG, PhD School of Software Engineering, Tongji University Spring 2015 Course Info Contact Information Room 314, Jishi Building Email: cslinzhang@tongji.edu.cn
Lecture 1 Introduction to Computer Vision Lin ZHANG, PhD School of Software Engineering, Tongji University Spring 2015 Course Info Contact Information Room 314, Jishi Building Email: cslinzhang@tongji.edu.cn
TAKING GREAT PICTURES. A Modest Introduction
 TAKING GREAT PICTURES A Modest Introduction 1 HOW TO CHOOSE THE RIGHT CAMERA EQUIPMENT 2 THE REALLY CONFUSING CAMERA MARKET Hundreds of models are now available Canon alone has 41 models 28 compacts and
TAKING GREAT PICTURES A Modest Introduction 1 HOW TO CHOOSE THE RIGHT CAMERA EQUIPMENT 2 THE REALLY CONFUSING CAMERA MARKET Hundreds of models are now available Canon alone has 41 models 28 compacts and
Gesture Recognition with Real World Environment using Kinect: A Review
 Gesture Recognition with Real World Environment using Kinect: A Review Prakash S. Sawai 1, Prof. V. K. Shandilya 2 P.G. Student, Department of Computer Science & Engineering, Sipna COET, Amravati, Maharashtra,
Gesture Recognition with Real World Environment using Kinect: A Review Prakash S. Sawai 1, Prof. V. K. Shandilya 2 P.G. Student, Department of Computer Science & Engineering, Sipna COET, Amravati, Maharashtra,
ULISSE COMPACT THERMAL
 2014/01/20 UNIT WITH INTEGRATED THERMAL AND DAY/NIGHT CAMERAS MAIN FEATURES Variable speed: 0.1-200 /s Pan/Tilt Horizontal continuous rotation, vertical -90 /+90 IP66 Dual independent video output Complete
2014/01/20 UNIT WITH INTEGRATED THERMAL AND DAY/NIGHT CAMERAS MAIN FEATURES Variable speed: 0.1-200 /s Pan/Tilt Horizontal continuous rotation, vertical -90 /+90 IP66 Dual independent video output Complete
LabVIEW based Intelligent Frontal & Non- Frontal Face Recognition System
 LabVIEW based Intelligent Frontal & Non- Frontal Face Recognition System Muralindran Mariappan, Manimehala Nadarajan, and Karthigayan Muthukaruppan Abstract Face identification and tracking has taken a
LabVIEW based Intelligent Frontal & Non- Frontal Face Recognition System Muralindran Mariappan, Manimehala Nadarajan, and Karthigayan Muthukaruppan Abstract Face identification and tracking has taken a
Input devices and interaction. Ruth Aylett
 Input devices and interaction Ruth Aylett Contents Tracking What is available Devices Gloves, 6 DOF mouse, WiiMote Why is it important? Interaction is basic to VEs We defined them as interactive in real-time
Input devices and interaction Ruth Aylett Contents Tracking What is available Devices Gloves, 6 DOF mouse, WiiMote Why is it important? Interaction is basic to VEs We defined them as interactive in real-time
Immersive Authoring of Tangible Augmented Reality Applications
 International Symposium on Mixed and Augmented Reality 2004 Immersive Authoring of Tangible Augmented Reality Applications Gun A. Lee α Gerard J. Kim α Claudia Nelles β Mark Billinghurst β α Virtual Reality
International Symposium on Mixed and Augmented Reality 2004 Immersive Authoring of Tangible Augmented Reality Applications Gun A. Lee α Gerard J. Kim α Claudia Nelles β Mark Billinghurst β α Virtual Reality
Homographies and Mosaics
 Homographies and Mosaics Jeffrey Martin (jeffrey-martin.com) CS194: Image Manipulation & Computational Photography with a lot of slides stolen from Alexei Efros, UC Berkeley, Fall 2014 Steve Seitz and
Homographies and Mosaics Jeffrey Martin (jeffrey-martin.com) CS194: Image Manipulation & Computational Photography with a lot of slides stolen from Alexei Efros, UC Berkeley, Fall 2014 Steve Seitz and
Image stabilization (IS)
") Image stabilization (IS) CS 178, Spring 2009 Marc Levoy Computer Science Department Stanford University Outline what are the causes of camera shake? and how can you avoid it (without having an IS system)?
Image stabilization (IS) CS 178, Spring 2009 Marc Levoy Computer Science Department Stanford University Outline what are the causes of camera shake? and how can you avoid it (without having an IS system)?
September CoroCAM 6D. Camera Operation Training. Copyright 2012
 CoroCAM 6D Camera Operation Training September 2012 CoroCAM 6D Body Rubber cover on SD Card slot & USB port Lens Cap retention loop Charging port, video & audio output, audio input Laser pointer CoroCAM
CoroCAM 6D Camera Operation Training September 2012 CoroCAM 6D Body Rubber cover on SD Card slot & USB port Lens Cap retention loop Charging port, video & audio output, audio input Laser pointer CoroCAM
Interactive Motion Analysis for Video Surveillance and Long Term Scene Monitoring
 Interactive Motion Analysis for Video Surveillance and Long Term Scene Monitoring Andrew W. Senior 1, YingLi Tian 2, and Max Lu 3 1 Google Research, 76 Ninth Ave, New York, NY 10011 andrewsenior@google.com
Interactive Motion Analysis for Video Surveillance and Long Term Scene Monitoring Andrew W. Senior 1, YingLi Tian 2, and Max Lu 3 1 Google Research, 76 Ninth Ave, New York, NY 10011 andrewsenior@google.com
Real-Time Cooperative Multi-Target Tracking by Communicating Active Vision Agents
 Real-Time Cooperative Multi-Target Tracking by Communicating Active Vision Agents Takashi Matsuyama Department of Intelligent Science and Technology Graduate School of Informatics, Kyoto University Sakyo,
Real-Time Cooperative Multi-Target Tracking by Communicating Active Vision Agents Takashi Matsuyama Department of Intelligent Science and Technology Graduate School of Informatics, Kyoto University Sakyo,
Research Seminar. Stefano CARRINO fr.ch
 Research Seminar Stefano CARRINO stefano.carrino@hefr.ch http://aramis.project.eia- fr.ch 26.03.2010 - based interaction Characterization Recognition Typical approach Design challenges, advantages, drawbacks
Research Seminar Stefano CARRINO stefano.carrino@hefr.ch http://aramis.project.eia- fr.ch 26.03.2010 - based interaction Characterization Recognition Typical approach Design challenges, advantages, drawbacks
Visual Search using Principal Component Analysis
 Visual Search using Principal Component Analysis Project Report Umesh Rajashekar EE381K - Multidimensional Digital Signal Processing FALL 2000 The University of Texas at Austin Abstract The development
Visual Search using Principal Component Analysis Project Report Umesh Rajashekar EE381K - Multidimensional Digital Signal Processing FALL 2000 The University of Texas at Austin Abstract The development
Privacy Preserving Optics for Miniature Vision Sensors
 Privacy Preserving Optics for Miniature Vision Sensors Francesco Pittaluga and Sanjeev J. Koppal University of Florida Electrical and Computer Engineering Shoham et al. 07, Wood 08, Enikov et al. 09, Agrihouse
Privacy Preserving Optics for Miniature Vision Sensors Francesco Pittaluga and Sanjeev J. Koppal University of Florida Electrical and Computer Engineering Shoham et al. 07, Wood 08, Enikov et al. 09, Agrihouse
Image Processing Based Vehicle Detection And Tracking System
 Image Processing Based Vehicle Detection And Tracking System Poonam A. Kandalkar 1, Gajanan P. Dhok 2 ME, Scholar, Electronics and Telecommunication Engineering, Sipna College of Engineering and Technology,
Image Processing Based Vehicle Detection And Tracking System Poonam A. Kandalkar 1, Gajanan P. Dhok 2 ME, Scholar, Electronics and Telecommunication Engineering, Sipna College of Engineering and Technology,
Real-Time Tracking via On-line Boosting Helmut Grabner, Michael Grabner, Horst Bischof
 Real-Time Tracking via On-line Boosting, Michael Grabner, Horst Bischof Graz University of Technology Institute for Computer Graphics and Vision Tracking Shrek M Grabner, H Grabner and H Bischof Real-time
Real-Time Tracking via On-line Boosting, Michael Grabner, Horst Bischof Graz University of Technology Institute for Computer Graphics and Vision Tracking Shrek M Grabner, H Grabner and H Bischof Real-time
Bandit Detection using Color Detection Method
 Available online at www.sciencedirect.com Procedia Engineering 29 (2012) 1259 1263 2012 International Workshop on Information and Electronic Engineering Bandit Detection using Color Detection Method Junoh,
Available online at www.sciencedirect.com Procedia Engineering 29 (2012) 1259 1263 2012 International Workshop on Information and Electronic Engineering Bandit Detection using Color Detection Method Junoh,
'Smart' cameras are watching you
 < Back Home 'Smart' cameras are watching you New surveillance camera being developed by Ohio State engineers will try to recognize suspicious or lost people By: Pam Frost Gorder, OSU Research Communications
< Back Home 'Smart' cameras are watching you New surveillance camera being developed by Ohio State engineers will try to recognize suspicious or lost people By: Pam Frost Gorder, OSU Research Communications
The Basics. Introducing PaintShop Pro X4 CHAPTER 1. What s Covered in this Chapter
 CHAPTER 1 The Basics Introducing PaintShop Pro X4 What s Covered in this Chapter This chapter explains what PaintShop Pro X4 can do and how it works. If you re new to the program, I d strongly recommend
CHAPTER 1 The Basics Introducing PaintShop Pro X4 What s Covered in this Chapter This chapter explains what PaintShop Pro X4 can do and how it works. If you re new to the program, I d strongly recommend
Lecture 1 Introduction to Computer Vision. Lin ZHANG, PhD School of Software Engineering, Tongji University Spring 2018
 Lecture 1 Introduction to Computer Vision Lin ZHANG, PhD School of Software Engineering, Tongji University Spring 2018 Course Info Contact Information Room 408L, Jishi Building Email: cslinzhang@tongji.edu.cn
Lecture 1 Introduction to Computer Vision Lin ZHANG, PhD School of Software Engineering, Tongji University Spring 2018 Course Info Contact Information Room 408L, Jishi Building Email: cslinzhang@tongji.edu.cn
COMPARATIVE PERFORMANCE ANALYSIS OF HAND GESTURE RECOGNITION TECHNIQUES
 International Journal of Advanced Research in Engineering and Technology (IJARET) Volume 9, Issue 3, May - June 2018, pp. 177 185, Article ID: IJARET_09_03_023 Available online at http://www.iaeme.com/ijaret/issues.asp?jtype=ijaret&vtype=9&itype=3
International Journal of Advanced Research in Engineering and Technology (IJARET) Volume 9, Issue 3, May - June 2018, pp. 177 185, Article ID: IJARET_09_03_023 Available online at http://www.iaeme.com/ijaret/issues.asp?jtype=ijaret&vtype=9&itype=3
Close-Range Photogrammetry for Accident Reconstruction Measurements
 Close-Range Photogrammetry for Accident Reconstruction Measurements iwitness TM Close-Range Photogrammetry Software www.iwitnessphoto.com Lee DeChant Principal DeChant Consulting Services DCS Inc Bellevue,
Close-Range Photogrammetry for Accident Reconstruction Measurements iwitness TM Close-Range Photogrammetry Software www.iwitnessphoto.com Lee DeChant Principal DeChant Consulting Services DCS Inc Bellevue,
gfm-app.com User Manual
 gfm-app.com User Manual 03.07.16 CONTENTS 1. MAIN CONTROLS Main interface 3 Control panel 3 Gesture controls 3-6 2. CAMERA FUNCTIONS Exposure 7 Focus 8 White balance 9 Zoom 10 Memory 11 3. AUTOMATED SEQUENCES
gfm-app.com User Manual 03.07.16 CONTENTS 1. MAIN CONTROLS Main interface 3 Control panel 3 Gesture controls 3-6 2. CAMERA FUNCTIONS Exposure 7 Focus 8 White balance 9 Zoom 10 Memory 11 3. AUTOMATED SEQUENCES
Deblurring. Basics, Problem definition and variants
 Deblurring Basics, Problem definition and variants Kinds of blur Hand-shake Defocus Credit: Kenneth Josephson Motion Credit: Kenneth Josephson Kinds of blur Spatially invariant vs. Spatially varying
Deblurring Basics, Problem definition and variants Kinds of blur Hand-shake Defocus Credit: Kenneth Josephson Motion Credit: Kenneth Josephson Kinds of blur Spatially invariant vs. Spatially varying