High Level Computer Vision. Introduction - April 16, Bernt Schiele & Mario Fritz MPI Informatics and Saarland University, Saarbrücken, Germany
|
|
|
- Gregory Bruce
- 5 years ago
- Views:
Transcription
1 Perceptual and Sensory Augmented Computing High Level Computer Vision Introduction - April 16, 2014 MPI Informatics and Saarland University, Saarbrücken, Germany

 Assistants: Fabio Galasso (galasso@mpi-inf.")


2 Computer Vision Lecturer: Bernt Schiele Mario Fritz Assistants: Fabio Galasso Zeynep Akata Language: English Webpage: mailing list for announcements etc. use link on webpage to enroll in mailing list High Level Computer Vision - April 16, 2o14 2
3 Lecture & Exercise Officially: 2V (lecture) + 2Ü (exercise) Lecture: Wed: 14:15-16:00 (room 024) Exercise: Thu: 12:15-14:00 (room 024) typically 1 exercise sheet every 1-2 weeks part of the final grade pencil and paper, as well as matlab-based exercise, reading assignment (research papers, overview papers, etc.) & larger project at end of lecture we/you propose project, mentoring, final presentation Exam planned as oral exam after the SS - there will be proposed dates High Level Computer Vision - April 16, 2o14 3

4 Material For part of the lecture: available online High Level Computer Vision - April 16, 2o14 4

5 Why Study Computer Vision Science Foundations of perception. How do WE see? computer vision to explore computational model of human vision High Level Computer Vision - April 16, 2o14 5

6 Why Study Computer Vision Science Foundations of perception. How do WE see? computer vision to explore computational model of human vision Engineering How do we build systems that perceive the world computer vision to solve real-world problems: cars to detect pedestrians High Level Computer Vision - April 16, 2o14 6
7 Why Study Computer Vision Science Foundations of perception. How do WE see? computer vision to explore computational model of human vision Engineering How do we build systems that perceive the world computer vision to solve real-world problems: cars to detect pedestrians Applications medical imaging (computer vision to support medical diagnosis, visualization) surveillance (to follow/track people at the airport, train-station,...) entertainment (vision-based interfaces for games) graphics (image-based rendering, vision to support realistic graphics) car-industry (lane-keeping, pre-crash intervention, ) High Level Computer Vision - April 16, 2o14 7

 Medical Imaging (Semi-)automatic segmentation and measurements Robotics Driver")
8 Some Applications License Plate Recognition London Congestion Charge imagingandcameras.html London_congestion_charge Surveillance Face Recognition Airport Security (People Tracking) Medical Imaging (Semi-)automatic segmentation and measurements Robotics Driver assistance High Level Computer Vision - April 16, 2o14 8



9 More Applications Microsoft High Level Computer Vision - April 16, 2o14 9
10 Goals of today s lecture First intuitions about What is computer vision? What does it mean to see and how do we (as humans) do it? How can we make this computational? Applications & Appetizers 2 case studies: Recovery of 3D structure - slides taken from Michael Brown University / MPI Intelligent Systems Object Recognition - intuition from human vision... High Level Computer Vision - April 16, 2o14 10
11 Perceptual and Sensory Augmented Computing Applications & Appetizers... work from our group

12 Detection & Recognition of Visual Categories Challenges: multi-scale multi-view multi-class varying illumination occlusion cluttered background articulation high intraclass variance low interclass variance High Level Computer Vision - April 16, 2o14 12




13 Challenges of Visual Categorization low inter-class variation high intra-class variation High Level Computer Vision - April 16, 2o14 13

14 Sample Category: Motorbikes High Level Computer Vision - April 16, 2o14 14


15 Basic Idea global I know where the Eiffel Tower is local High Level Computer Vision - April 16, 2o14 15


 exist Learning")

16 Large Scale Object Class Recognition Learning Shape Models from 3D CAD Data 3D Computer Aided Design (CAD) Models for - computer graphics, game design - polygonal meshes + texture descriptions - semantic part annotations (may) exist Learning Object Class Model directly from 3D CAD-data: Michael Stark High Level Computer Vision - April 16, 2o14 16

17 Video... High Level Computer Vision - April 16, 2o14 18









18 Articulation Model Assume uniform position prior for the whole body Learn the conditional relation between part position and body center from data: 400 annotated training images High Level Computer Vision - April 16, 2o14 19
 High Level Computer Vision - April 16, 2o14")
19 Modeling Body Dynamics Visualization of the hierarchical Gaussian process latent variable model (hgplvm) High Level Computer Vision - April 16, 2o14 21

20 High Level Computer Vision - April 16, 2o14 23

21 High Level Computer Vision - April 16, 2o14 24

22 Complete 3D Scene Modeling Goal: Infer consistent 3D world hypothesis from 2D image sequences with a moving monocular camera Tracking 3D Scene Model Integrate SoA object detectors, scene labeling Efficiently leverage domain knowledge [Wojek et.al.@eccv10] High Level Computer Vision - April 16, 2o14 29
 ETH-Loewenplatz sequence: By courtesy of ETH")
23 [Wojek System sample video (pedestrians) ETH-Loewenplatz sequence: By courtesy of ETH Zürich [Ess et al., PAMI 09] High Level Computer Vision - April 16, 2o14 31
 High")
24 [Wojek System sample video (vehicles) High Level Computer Vision - April 16, 2o14 32


25 Sequential Model Update for Scene Labeling (Fritz,Levinkov) High Level Computer Vision - April 16, 2o14 33


26 Sequential Model Update for Scene Labeling (Fritz,Levinkov) High Level Computer Vision - April 16, 2o14 34

27 Perception for Manipulation High Level Computer Vision - April 16, 2o14 35

28 Perception for Manipulation High Level Computer Vision - April 16, 2o14 36
 High Level Computer Vision - April 16,")
29 Multi-Class Video Co-Segmentation (Fritz, Chiu) High Level Computer Vision - April 16, 2o14 37
 High Level Computer Vision - April 16,")
30 Multi-Class Video Co-Segmentation (Fritz, Chiu) High Level Computer Vision - April 16, 2o14 38


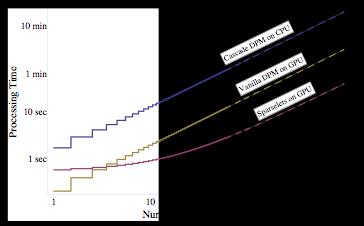
31 Efficient Object Detection with Shared Representations High Level Computer Vision
32 Perceptual and Sensory Augmented Computing Basic Concepts and Terminology Computer Vision vs. Computer Graphics
33 Pinhole Camera (Model) (simple) standard and abstract model today box with a small hole in it High Level Computer Vision - April 16, 2o14 50

34 Camera Obscura around 1519, Leonardo da Vinci ( ) when images of illuminated objects penetrate through a small hole into a very dark room you will see [on the opposite wall] these objects in their proper form and color, reduced in size in a reversed position owing to the intersection of the rays High Level Computer Vision - April 16, 2o14 51
 and scientists High Level Computer")
35 Principle of pinhole......used by artists (e.g. Vermeer 17th century, dutch) and scientists High Level Computer Vision - April 16, 2o14 52
36 Digital Images Imaging Process: (pinhole) camera model digitizer to obtain digital image High Level Computer Vision - April 16, 2o14 53
 numbers?")
 numbers so that the human observer perceives depth?")
37 (Grayscale) Image Goals of Computer Vision how can we recognize fruits from an array of (gray-scale) numbers? how can we perceive depth from an array of (gray-scale) numbers? Goals of Graphics how can we generate an array of (gray-scale) numbers that looks like fruits? how can we generate an array of (gray-scale) numbers so that the human observer perceives depth? computer vision = the problem of inverse graphics? High Level Computer Vision - April 16, 2o14 54
38 Perceptual and Sensory Augmented Computing Visual Cues for Image Analysis... in art and visual illusions

39 1. Case Study: Human & Art - Recovery of 3D Structure High Level Computer Vision - April 16, 2o14 57

40 1. Case Study: Human & Art - Recovery of 3D Structure High Level Computer Vision - April 16, 2o14 58

41 1. Case Study: Human & Art - Recovery of 3D Structure High Level Computer Vision - April 16, 2o14 59

42 1. Case Study: Human & Art - Recovery of 3D Structure High Level Computer Vision - April 16, 2o14 60

43 1. Case Study: Human & Art - Recovery of 3D Structure High Level Computer Vision - April 16, 2o14 61


44 1. Case Study: Human & Art - Recovery of 3D Structure High Level Computer Vision - April 16, 2o14 62

45 1. Case Study Computer Vision - Recovery of 3D Structure take all the cues of artists and turn them around exploit these cues to infer the structure of the world need mathematical and computational models of these cues sometimes called inverse graphics High Level Computer Vision - April 16, 2o14 63

46 A trompe l oeil depth-perception movement of ball stays the same location/trace of shadow changes High Level Computer Vision - April 16, 2o14 64

47 Another trompe l oeil illusory motion only shadows changes square is stationary High Level Computer Vision - April 16, 2o14 65
48 Color & Shading High Level Computer Vision - April 16, 2o14 66

49 Color & Shading High Level Computer Vision - April 16, 2o14 67
50 High Level Computer Vision - April 16, 2o14 68
51 High Level Computer Vision - April 16, 2o14 69
52 High Level Computer Vision - April 16, 2o14 70

53 High Level Computer Vision - April 16, 2o14 71

54 High Level Computer Vision - April 16, 2o14 72

55 Do you still think you see the world? High Level Computer Vision - April 16, 2o14 73
56 Do you still believe what you see? Experiment carefully point flash light into your eye from one corner don t hurt yourself! Observation you ll see your own blood vessels they are actually in front of the retina we ve adapted to their usual shadow High Level Computer Vision - April 16, 2o14 75

57 2. Case Study: Computer Vision & Object Recognition is it more than inverse graphics? how do you recognize the banana? the glass? the towel? how can we make computers to do this? ill posed problem: missing data ambiguities multiple possible explanations High Level Computer Vision - April 16, 2o14 76

58 Image Analysis vs. Synthesis from: Object Perception as Bayesian Inference Kersten 2003 High Level Computer Vision - April 16, 2o14 78

59 Complexity of Recognition High Level Computer Vision - April 16, 2o14 79

60 Complexity of Recognition High Level Computer Vision - April 16, 2o14 80

61 Complexity of Recognition High Level Computer Vision - April 16, 2o14 81

62 Complexity of Recognition High Level Computer Vision - April 16, 2o14 82

63 Complexity of Recognition High Level Computer Vision - April 16, 2o14 83

64 Recognition: the Role of Context Antonio Torralba High Level Computer Vision - April 16, 2o14 84


65 Recognition: the role of Prior Expectation Guiseppe Arcimboldo High Level Computer Vision - April 16, 2o14 85

66 Complexity of Recognition High Level Computer Vision - April 16, 2o14 86

67 Complexity of Recognition High Level Computer Vision - April 16, 2o14 87

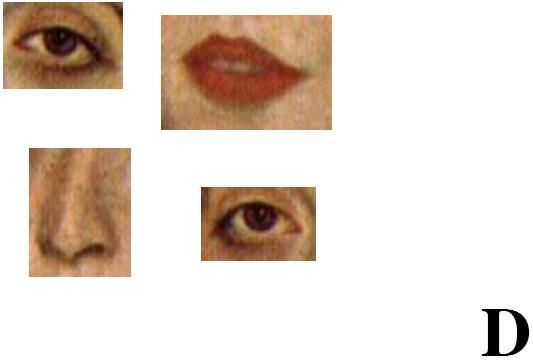
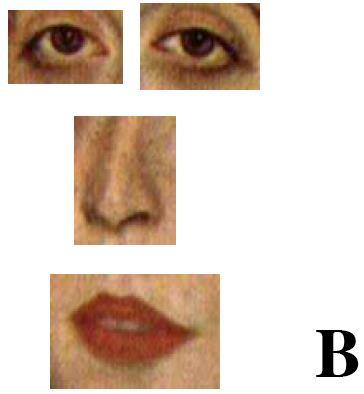
68 One or Two Faces? High Level Computer Vision - April 16, 2o14 88
69 Class of Models: Pictorial Structure Fischler & Elschlager 1973 Model has two components parts (2D image fragments) structure (configuration of parts) High Level Computer Vision - April 16, 2o14 89
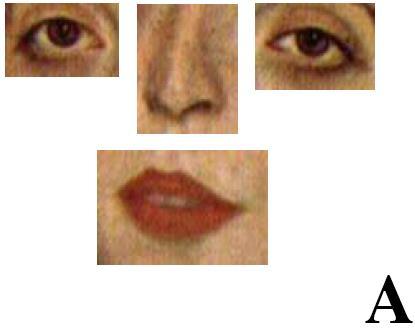
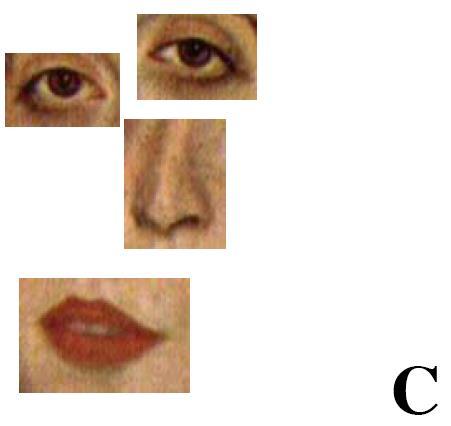
70 Deformations High Level Computer Vision - April 16, 2o14 90

71 Clutter High Level Computer Vision - April 16, 2o14 91




72 Example High Level Computer Vision - April 16, 2o14 92
73 Perceptual and Sensory Augmented Computing Recognition, Localization, and Segmentation a few terms let s briefly define what we mean by that
74 Object Recognition: First part of this Computer Vision class Different Types of Recognition Problems: Object Identification - recognize your pencil, your dog, your car Object Classification - recognize any pencil, any dog, any car - also called: generic object recognition, object categorization, Recognition and Segmentation: separate pixels belonging to the foreground (object) and the background Localization/Detection: position of the object in the scene, pose estimate (orientation, size/scale, 3D position) High Level Computer Vision - April 16, 2o14 94

75 Object Recognition: First part of this Computer Vision class Different Types of Recognition Problems: Object Identification - recognize your apple, your cup, your dog Object Classification - recognize any apple, any cup, any dog - also called: generic object recognition, object categorization, - typical definition: basic level category High Level Computer Vision - April 16, 2o14 95
76 Which Level is right for Object Classes? Basic-Level Categories the highest level at which category members have similar perceived shape the highest level at which a single mental image can reflect the entire category the highest level at which a person uses similar motor actions to interact with category members the level at which human subjects are usually fastest at identifying category members the first level named and understood by children (while the definition of basic-level categories depends on culture there exist a remarkable consistency across cultures...) Most recent work in object recognition has focused on this problem we will discuss several of the most successful methods in the lecture :-) High Level Computer Vision - April 16, 2o14 96
 and the background High Level Computer Vision - April 16,")
77 Object Recognition: First part of this Computer Vision class Recognition and Segmentation: separate pixels belonging to the foreground (object) and the background High Level Computer Vision - April 16, 2o14 97
 Example from David Lowe: High Level Computer Vision - April 16,")
78 Object Recognition: First part of this Computer Vision class Recognition and Localization: to position the object in the scene, estimate the object s pose (orientation, size/scale, 3D position) Example from David Lowe: High Level Computer Vision - April 16, 2o14 98

79 Localization: Example Video 1 High Level Computer Vision - April 16, 2o14 99

80 Localization: Example Video 2 High Level Computer Vision - April 16, 2o14 100
81 Object Recognition: First part of this Computer Vision class Different Types of Recognition Problems: Object Identification - recognize your pencil, your dog, your car Object Classification - recognize any pencil, any dog, any car - also called: generic object recognition, object categorization, Recognition and Segmentation: separate pixels belonging to the foreground (object) and the background Localization: position the object in the scene, estimate pose of the object (orientation, size/scale, 3D position) High Level Computer Vision - April 16, 2o14 101
82 Perceptual and Sensory Augmented Computing Basic Filtering
83 Computer Vision and Fundamental Components computer vision: reverse the imaging process 2D (2-dimensional) digital image processing pattern recognition / 3D image analysis image understanding High Level Computer Vision - April 16, 2o14 104
84 Digital Image Processing Some Basics (digital signal processing, FFT, ) Image Filtering - (taken from a class by Bill Image Filtering take some local image patch (e.g. 3x3 block) image filtering: apply some function to local image patch High Level Computer Vision - April 16, 2o14 105
85 Image Filtering Some Examples: what assumptions are you making to infer the center value? Goals of Image Filtering: reduce noise fill-in missing values/information extract image features (e.g.edges/corners)... 3 or 4 High Level Computer Vision - April 16, 2o14 106
86 Image Filtering simplest case: linear filtering: replace each pixel by a linear combination of its neighbors the prescription for the linear combination is called the convolution kernel High Level Computer Vision - April 16, 2o14 107
87 2D signals and convolution Components of convolution : Image: - continuous: I(x,y) - discrete: I[k,l] or I k,l filter kernel : g[k,l] filtered image: f[m,n] 2D convolution (discrete): special case: convolution (discrete) of a 2D-image with a 1D-filter High Level Computer Vision - April 16, 2o14 108

88 Linear Filtering (warm-up slide) High Level Computer Vision - April 16, 2o14 109

89 Linear Filtering (warm-up slide) High Level Computer Vision - April 16, 2o14 110

90 Try it out in GIMP You can try out linear filter kernels in the free image manipulation tool GIMP - availble at gimp.org open image from the menu pick: Filters - Generic Convolution Matrix... enter filter kernel in Matrix press ok to apply High Level Computer Vision - April 16, 2o14 111
91 Linear Filtering High Level Computer Vision - April 16, 2o14 112

92 Linear Filtering High Level Computer Vision - April 16, 2o14 113

93 Linear Filtering High Level Computer Vision - April 16, 2o14 114
94 Blurring High Level Computer Vision - April 16, 2o14 115
95 Blurring Examples High Level Computer Vision - April 16, 2o14 116
96 Linear Filtering (warm-up slide) High Level Computer Vision - April 16, 2o14 117

97 Linear Filtering (warm-up slide) High Level Computer Vision - April 16, 2o14 118
98 Linear Filtering High Level Computer Vision - April 16, 2o14 119

99 (remember blurring) High Level Computer Vision - April 16, 2o14 120

100 Sharpening High Level Computer Vision - April 16, 2o14 121
101 Sharpening Example High Level Computer Vision - April 16, 2o14 122

102 Sharpening High Level Computer Vision - April 16, 2o14 123
Computer Vision Lecture 1
 Computer Vision Lecture 1 Introduction 19.10.2016 Bastian Leibe Visual Computing Institute RWTH Aachen University http://www.vision.rwth-aachen.de/ leibe@vision.rwth-aachen.de Organization Lecturer Prof.
Computer Vision Lecture 1 Introduction 19.10.2016 Bastian Leibe Visual Computing Institute RWTH Aachen University http://www.vision.rwth-aachen.de/ leibe@vision.rwth-aachen.de Organization Lecturer Prof.
Today I t n d ro ucti tion to computer vision Course overview Course requirements
 COMP 776: Computer Vision Today Introduction ti to computer vision i Course overview Course requirements The goal of computer vision To extract t meaning from pixels What we see What a computer sees Source:
COMP 776: Computer Vision Today Introduction ti to computer vision i Course overview Course requirements The goal of computer vision To extract t meaning from pixels What we see What a computer sees Source:
Introduction. Visual data acquisition devices. The goal of computer vision. The goal of computer vision. Vision as measurement device
 Spring 15 CIS 5543 Computer Vision Visual data acquisition devices Introduction Haibin Ling http://www.dabi.temple.edu/~hbling/teaching/15s_5543/index.html Revised from S. Lazebnik The goal of computer
Spring 15 CIS 5543 Computer Vision Visual data acquisition devices Introduction Haibin Ling http://www.dabi.temple.edu/~hbling/teaching/15s_5543/index.html Revised from S. Lazebnik The goal of computer
Spring 2018 CS543 / ECE549 Computer Vision. Course webpage URL:
 Spring 2018 CS543 / ECE549 Computer Vision Course webpage URL: http://slazebni.cs.illinois.edu/spring18/ The goal of computer vision To extract meaning from pixels What we see What a computer sees Source:
Spring 2018 CS543 / ECE549 Computer Vision Course webpage URL: http://slazebni.cs.illinois.edu/spring18/ The goal of computer vision To extract meaning from pixels What we see What a computer sees Source:
Color Space 1: RGB Color Space. Color Space 2: HSV. RGB Cube Easy for devices But not perceptual Where do the grays live? Where is hue and saturation?
 Color Space : RGB Color Space Color Space 2: HSV RGB Cube Easy for devices But not perceptual Where do the grays live? Where is hue and saturation? Hue, Saturation, Value (Intensity) RBG cube on its vertex
Color Space : RGB Color Space Color Space 2: HSV RGB Cube Easy for devices But not perceptual Where do the grays live? Where is hue and saturation? Hue, Saturation, Value (Intensity) RBG cube on its vertex
CSCE 763: Digital Image Processing
 CSCE 763: Digital Image Processing Spring 2018 Yan Tong Department of Computer Science and Engineering University of South Carolina Today s Agenda Welcome Tentative Syllabus Topics covered in the course
CSCE 763: Digital Image Processing Spring 2018 Yan Tong Department of Computer Science and Engineering University of South Carolina Today s Agenda Welcome Tentative Syllabus Topics covered in the course
Today. CS 395T Visual Recognition. Course content. Administration. Expectations. Paper reviews
 Today CS 395T Visual Recognition Course logistics Overview Volunteers, prep for next week Thursday, January 18 Administration Class: Tues / Thurs 12:30-2 PM Instructor: Kristen Grauman grauman at cs.utexas.edu
Today CS 395T Visual Recognition Course logistics Overview Volunteers, prep for next week Thursday, January 18 Administration Class: Tues / Thurs 12:30-2 PM Instructor: Kristen Grauman grauman at cs.utexas.edu
CSE 408 Multimedia Information System
 CSE 408 Multimedia Information System Intro to Images & Vision Yezhou Yang Lots of slides from Tamara Berg and L. Feifei Intro to Computer Vision Source: L. Lazebnik The goal of computer vision To perceive
CSE 408 Multimedia Information System Intro to Images & Vision Yezhou Yang Lots of slides from Tamara Berg and L. Feifei Intro to Computer Vision Source: L. Lazebnik The goal of computer vision To perceive
COMP 776: Computer Vision
 COMP 776: Computer Vision Basic Info Instructor: Svetlana Lazebnik (lazebnik@cs.unc.edu) Office hours: By appointment, FB 244 Textbook (recommended): Forsyth & Ponce, Computer Vision: A Modern Approach
COMP 776: Computer Vision Basic Info Instructor: Svetlana Lazebnik (lazebnik@cs.unc.edu) Office hours: By appointment, FB 244 Textbook (recommended): Forsyth & Ponce, Computer Vision: A Modern Approach
Introduction. BIL719 Computer Vision Pinar Duygulu Hacettepe University
 Introduction BIL719 Computer Vision Pinar Duygulu Hacettepe University Basic Info Textbooks (suggested): Forsyth & Ponce, Computer Vision: A Modern Approach Richard Szeliski, Computer Vision: Algorithms
Introduction BIL719 Computer Vision Pinar Duygulu Hacettepe University Basic Info Textbooks (suggested): Forsyth & Ponce, Computer Vision: A Modern Approach Richard Szeliski, Computer Vision: Algorithms
Image Processing Based Vehicle Detection And Tracking System
 Image Processing Based Vehicle Detection And Tracking System Poonam A. Kandalkar 1, Gajanan P. Dhok 2 ME, Scholar, Electronics and Telecommunication Engineering, Sipna College of Engineering and Technology,
Image Processing Based Vehicle Detection And Tracking System Poonam A. Kandalkar 1, Gajanan P. Dhok 2 ME, Scholar, Electronics and Telecommunication Engineering, Sipna College of Engineering and Technology,
Computer Vision. Howie Choset Introduction to Robotics
 Computer Vision Howie Choset http://www.cs.cmu.edu.edu/~choset Introduction to Robotics http://generalrobotics.org What is vision? What is computer vision? Edge Detection Edge Detection Interest points
Computer Vision Howie Choset http://www.cs.cmu.edu.edu/~choset Introduction to Robotics http://generalrobotics.org What is vision? What is computer vision? Edge Detection Edge Detection Interest points
SECTION I - CHAPTER 2 DIGITAL IMAGING PROCESSING CONCEPTS
 RADT 3463 - COMPUTERIZED IMAGING Section I: Chapter 2 RADT 3463 Computerized Imaging 1 SECTION I - CHAPTER 2 DIGITAL IMAGING PROCESSING CONCEPTS RADT 3463 COMPUTERIZED IMAGING Section I: Chapter 2 RADT
RADT 3463 - COMPUTERIZED IMAGING Section I: Chapter 2 RADT 3463 Computerized Imaging 1 SECTION I - CHAPTER 2 DIGITAL IMAGING PROCESSING CONCEPTS RADT 3463 COMPUTERIZED IMAGING Section I: Chapter 2 RADT
PERCEIVING MOVEMENT. Ways to create movement
 PERCEIVING MOVEMENT Ways to create movement Perception More than one ways to create the sense of movement Real movement is only one of them Slide 2 Important for survival Animals become still when they
PERCEIVING MOVEMENT Ways to create movement Perception More than one ways to create the sense of movement Real movement is only one of them Slide 2 Important for survival Animals become still when they
Digital image processing vs. computer vision Higher-level anchoring
 Digital image processing vs. computer vision Higher-level anchoring Václav Hlaváč Czech Technical University in Prague Faculty of Electrical Engineering, Department of Cybernetics Center for Machine Perception
Digital image processing vs. computer vision Higher-level anchoring Václav Hlaváč Czech Technical University in Prague Faculty of Electrical Engineering, Department of Cybernetics Center for Machine Perception
Computer Vision Lesson Plan
 Computer Vision Lesson Plan Overview Computer Vision Summary Computers today are being used to accomplish tasks that require using one or more of the five senses. Vision - seeing objects and identifying
Computer Vision Lesson Plan Overview Computer Vision Summary Computers today are being used to accomplish tasks that require using one or more of the five senses. Vision - seeing objects and identifying
Prof. Riyadh Al_Azzawi F.R.C.Psych
 Prof. Riyadh Al_Azzawi F.R.C.Psych Perception: is the study of how we integrate sensory information into percepts of objects and how we then use these percepts to get around in the world (a percept is
Prof. Riyadh Al_Azzawi F.R.C.Psych Perception: is the study of how we integrate sensory information into percepts of objects and how we then use these percepts to get around in the world (a percept is
Automatics Vehicle License Plate Recognition using MATLAB
 Automatics Vehicle License Plate Recognition using MATLAB Alhamzawi Hussein Ali mezher Faculty of Informatics/University of Debrecen Kassai ut 26, 4028 Debrecen, Hungary. Abstract - The objective of this
Automatics Vehicle License Plate Recognition using MATLAB Alhamzawi Hussein Ali mezher Faculty of Informatics/University of Debrecen Kassai ut 26, 4028 Debrecen, Hungary. Abstract - The objective of this
Telling What-Is-What in Video. Gerard Medioni
 Telling What-Is-What in Video Gerard Medioni medioni@usc.edu 1 Tracking Essential problem Establishes correspondences between elements in successive frames Basic problem easy 2 Many issues One target (pursuit)
Telling What-Is-What in Video Gerard Medioni medioni@usc.edu 1 Tracking Essential problem Establishes correspondences between elements in successive frames Basic problem easy 2 Many issues One target (pursuit)
ECC419 IMAGE PROCESSING
 ECC419 IMAGE PROCESSING INTRODUCTION Image Processing Image processing is a subclass of signal processing concerned specifically with pictures. Digital Image Processing, process digital images by means
ECC419 IMAGE PROCESSING INTRODUCTION Image Processing Image processing is a subclass of signal processing concerned specifically with pictures. Digital Image Processing, process digital images by means
Last Lecture. photomatix.com
 Last Lecture photomatix.com Today Image Processing: from basic concepts to latest techniques Filtering Edge detection Re-sampling and aliasing Image Pyramids (Gaussian and Laplacian) Removing handshake
Last Lecture photomatix.com Today Image Processing: from basic concepts to latest techniques Filtering Edge detection Re-sampling and aliasing Image Pyramids (Gaussian and Laplacian) Removing handshake
P rcep e t p i t on n a s a s u n u c n ons n c s ious u s i nf n e f renc n e L ctur u e 4 : Recogni n t i io i n
 Lecture 4: Recognition and Identification Dr. Tony Lambert Reading: UoA text, Chapter 5, Sensation and Perception (especially pp. 141-151) 151) Perception as unconscious inference Hermann von Helmholtz
Lecture 4: Recognition and Identification Dr. Tony Lambert Reading: UoA text, Chapter 5, Sensation and Perception (especially pp. 141-151) 151) Perception as unconscious inference Hermann von Helmholtz
Computational Vision and Picture. Plan. Computational Vision and Picture. Distal vs. proximal stimulus. Vision as an inverse problem
 Perceptual and Artistic Principles for Effective Computer Depiction Perceptual and Artistic Principles for Effective Computer Depiction Computational Vision and Picture Fredo Durand MIT- Lab for Computer
Perceptual and Artistic Principles for Effective Computer Depiction Perceptual and Artistic Principles for Effective Computer Depiction Computational Vision and Picture Fredo Durand MIT- Lab for Computer
Computational Approaches to Cameras
 Computational Approaches to Cameras 11/16/17 Magritte, The False Mirror (1935) Computational Photography Derek Hoiem, University of Illinois Announcements Final project proposal due Monday (see links on
Computational Approaches to Cameras 11/16/17 Magritte, The False Mirror (1935) Computational Photography Derek Hoiem, University of Illinois Announcements Final project proposal due Monday (see links on
Last Lecture. photomatix.com
 Last Lecture photomatix.com HDR Video Assorted pixel (Single Exposure HDR) Assorted pixel Assorted pixel Pixel with Adaptive Exposure Control light attenuator element detector element T t+1 I t controller
Last Lecture photomatix.com HDR Video Assorted pixel (Single Exposure HDR) Assorted pixel Assorted pixel Pixel with Adaptive Exposure Control light attenuator element detector element T t+1 I t controller
Lecture 1 Introduction to Computer Vision. Lin ZHANG, PhD School of Software Engineering, Tongji University Spring 2014
 Lecture 1 Introduction to Computer Vision Lin ZHANG, PhD School of Software Engineering, Tongji University Spring 2014 Course Info Contact Information Room 314, Jishi Building Email: cslinzhang@tongji.edu.cn
Lecture 1 Introduction to Computer Vision Lin ZHANG, PhD School of Software Engineering, Tongji University Spring 2014 Course Info Contact Information Room 314, Jishi Building Email: cslinzhang@tongji.edu.cn
Perception. What We Will Cover in This Section. Perception. How we interpret the information our senses receive. Overview Perception
 Perception 10/3/2002 Perception.ppt 1 What We Will Cover in This Section Overview Perception Visual perception. Organizing principles. 10/3/2002 Perception.ppt 2 Perception How we interpret the information
Perception 10/3/2002 Perception.ppt 1 What We Will Cover in This Section Overview Perception Visual perception. Organizing principles. 10/3/2002 Perception.ppt 2 Perception How we interpret the information
Lecture 1 Introduction to Computer Vision. Lin ZHANG, PhD School of Software Engineering, Tongji University Spring 2018
 Lecture 1 Introduction to Computer Vision Lin ZHANG, PhD School of Software Engineering, Tongji University Spring 2018 Course Info Contact Information Room 408L, Jishi Building Email: cslinzhang@tongji.edu.cn
Lecture 1 Introduction to Computer Vision Lin ZHANG, PhD School of Software Engineering, Tongji University Spring 2018 Course Info Contact Information Room 408L, Jishi Building Email: cslinzhang@tongji.edu.cn
CS 376b Computer Vision
 CS 376b Computer Vision 09 / 03 / 2014 Instructor: Michael Eckmann Today s Topics This is technically a lab/discussion session, but I'll treat it as a lecture today. Introduction to the course layout,
CS 376b Computer Vision 09 / 03 / 2014 Instructor: Michael Eckmann Today s Topics This is technically a lab/discussion session, but I'll treat it as a lecture today. Introduction to the course layout,
Introduction. Ioannis Rekleitis
 Introduction Ioannis Rekleitis Why Image Processing? Who here has a camera? How many cameras do you have Point where computers fast/cheap Cameras become omnipresent Deep Learning CSCE 590: Introduction
Introduction Ioannis Rekleitis Why Image Processing? Who here has a camera? How many cameras do you have Point where computers fast/cheap Cameras become omnipresent Deep Learning CSCE 590: Introduction
Background. Computer Vision & Digital Image Processing. Improved Bartlane transmitted image. Example Bartlane transmitted image
 Background Computer Vision & Digital Image Processing Introduction to Digital Image Processing Interest comes from two primary backgrounds Improvement of pictorial information for human perception How
Background Computer Vision & Digital Image Processing Introduction to Digital Image Processing Interest comes from two primary backgrounds Improvement of pictorial information for human perception How
Digital Image Processing. Lecture 1 (Introduction) Bu-Ali Sina University Computer Engineering Dep. Fall 2011
 Bu-Ali Sina University Computer Engineering Dep. Fall 2011") Digital Processing Lecture 1 (Introduction) Bu-Ali Sina University Computer Engineering Dep. Fall 2011 Introduction One picture is worth more than ten thousand p words Outline Syllabus References Course
Digital Processing Lecture 1 (Introduction) Bu-Ali Sina University Computer Engineering Dep. Fall 2011 Introduction One picture is worth more than ten thousand p words Outline Syllabus References Course
Lecture 1 Introduction to Computer Vision. Lin ZHANG, PhD School of Software Engineering, Tongji University Spring 2015
 Lecture 1 Introduction to Computer Vision Lin ZHANG, PhD School of Software Engineering, Tongji University Spring 2015 Course Info Contact Information Room 314, Jishi Building Email: cslinzhang@tongji.edu.cn
Lecture 1 Introduction to Computer Vision Lin ZHANG, PhD School of Software Engineering, Tongji University Spring 2015 Course Info Contact Information Room 314, Jishi Building Email: cslinzhang@tongji.edu.cn
An Improved Bernsen Algorithm Approaches For License Plate Recognition
 IOSR Journal of Electronics and Communication Engineering (IOSR-JECE) ISSN: 78-834, ISBN: 78-8735. Volume 3, Issue 4 (Sep-Oct. 01), PP 01-05 An Improved Bernsen Algorithm Approaches For License Plate Recognition
IOSR Journal of Electronics and Communication Engineering (IOSR-JECE) ISSN: 78-834, ISBN: 78-8735. Volume 3, Issue 4 (Sep-Oct. 01), PP 01-05 An Improved Bernsen Algorithm Approaches For License Plate Recognition
Module 2. Lecture-1. Understanding basic principles of perception including depth and its representation.
 Module 2 Lecture-1 Understanding basic principles of perception including depth and its representation. Initially let us take the reference of Gestalt law in order to have an understanding of the basic
Module 2 Lecture-1 Understanding basic principles of perception including depth and its representation. Initially let us take the reference of Gestalt law in order to have an understanding of the basic
Computer Vision Slides curtesy of Professor Gregory Dudek
 Computer Vision Slides curtesy of Professor Gregory Dudek Ioannis Rekleitis Why vision? Passive (emits nothing). Discreet. Energy efficient. Intuitive. Powerful (works well for us, right?) Long and short
Computer Vision Slides curtesy of Professor Gregory Dudek Ioannis Rekleitis Why vision? Passive (emits nothing). Discreet. Energy efficient. Intuitive. Powerful (works well for us, right?) Long and short
Practical Image and Video Processing Using MATLAB
 Practical Image and Video Processing Using MATLAB Chapter 1 Introduction and overview What will we learn? What is image processing? What are the main applications of image processing? What is an image?
Practical Image and Video Processing Using MATLAB Chapter 1 Introduction and overview What will we learn? What is image processing? What are the main applications of image processing? What is an image?
6.098 Digital and Computational Photography Advanced Computational Photography. Bill Freeman Frédo Durand MIT - EECS
 6.098 Digital and Computational Photography 6.882 Advanced Computational Photography Bill Freeman Frédo Durand MIT - EECS Administrivia PSet 1 is out Due Thursday February 23 Digital SLR initiation? During
6.098 Digital and Computational Photography 6.882 Advanced Computational Photography Bill Freeman Frédo Durand MIT - EECS Administrivia PSet 1 is out Due Thursday February 23 Digital SLR initiation? During
ELEC Dr Reji Mathew Electrical Engineering UNSW
 ELEC 4622 Dr Reji Mathew Electrical Engineering UNSW Multi-Resolution Processing Gaussian Pyramid Starting with an image x[n], which we will also label x 0 [n], Construct a sequence of progressively lower
ELEC 4622 Dr Reji Mathew Electrical Engineering UNSW Multi-Resolution Processing Gaussian Pyramid Starting with an image x[n], which we will also label x 0 [n], Construct a sequence of progressively lower
02/02/10. Image Filtering. Computer Vision CS 543 / ECE 549 University of Illinois. Derek Hoiem
 2/2/ Image Filtering Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Questions about HW? Questions about class? Room change starting thursday: Everitt 63, same time Key ideas from last
2/2/ Image Filtering Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Questions about HW? Questions about class? Room change starting thursday: Everitt 63, same time Key ideas from last
COPYRIGHTED MATERIAL. Overview
 In normal experience, our eyes are constantly in motion, roving over and around objects and through ever-changing environments. Through this constant scanning, we build up experience data, which is manipulated
In normal experience, our eyes are constantly in motion, roving over and around objects and through ever-changing environments. Through this constant scanning, we build up experience data, which is manipulated
Image Extraction using Image Mining Technique
 IOSR Journal of Engineering (IOSRJEN) e-issn: 2250-3021, p-issn: 2278-8719 Vol. 3, Issue 9 (September. 2013), V2 PP 36-42 Image Extraction using Image Mining Technique Prof. Samir Kumar Bandyopadhyay,
IOSR Journal of Engineering (IOSRJEN) e-issn: 2250-3021, p-issn: 2278-8719 Vol. 3, Issue 9 (September. 2013), V2 PP 36-42 Image Extraction using Image Mining Technique Prof. Samir Kumar Bandyopadhyay,
COPYRIGHTED MATERIAL OVERVIEW 1
 OVERVIEW 1 In normal experience, our eyes are constantly in motion, roving over and around objects and through ever-changing environments. Through this constant scanning, we build up experiential data,
OVERVIEW 1 In normal experience, our eyes are constantly in motion, roving over and around objects and through ever-changing environments. Through this constant scanning, we build up experiential data,
COMPARATIVE PERFORMANCE ANALYSIS OF HAND GESTURE RECOGNITION TECHNIQUES
 International Journal of Advanced Research in Engineering and Technology (IJARET) Volume 9, Issue 3, May - June 2018, pp. 177 185, Article ID: IJARET_09_03_023 Available online at http://www.iaeme.com/ijaret/issues.asp?jtype=ijaret&vtype=9&itype=3
International Journal of Advanced Research in Engineering and Technology (IJARET) Volume 9, Issue 3, May - June 2018, pp. 177 185, Article ID: IJARET_09_03_023 Available online at http://www.iaeme.com/ijaret/issues.asp?jtype=ijaret&vtype=9&itype=3
CS6670: Computer Vision
 CS6670: Computer Vision Noah Snavely Lecture 22: Computational photography photomatix.com Announcements Final project midterm reports due on Tuesday to CMS by 11:59pm BRDF s can be incredibly complicated
CS6670: Computer Vision Noah Snavely Lecture 22: Computational photography photomatix.com Announcements Final project midterm reports due on Tuesday to CMS by 11:59pm BRDF s can be incredibly complicated
Chapter 17. Shape-Based Operations
 Chapter 17 Shape-Based Operations An shape-based operation identifies or acts on groups of pixels that belong to the same object or image component. We have already seen how components may be identified
Chapter 17 Shape-Based Operations An shape-based operation identifies or acts on groups of pixels that belong to the same object or image component. We have already seen how components may be identified
Lane Detection in Automotive
 Lane Detection in Automotive Contents Introduction... 2 Image Processing... 2 Reading an image... 3 RGB to Gray... 3 Mean and Gaussian filtering... 5 Defining our Region of Interest... 6 BirdsEyeView Transformation...
Lane Detection in Automotive Contents Introduction... 2 Image Processing... 2 Reading an image... 3 RGB to Gray... 3 Mean and Gaussian filtering... 5 Defining our Region of Interest... 6 BirdsEyeView Transformation...
Computer Vision. Thursday, August 30
 Computer Vision Thursday, August 30 1 Today Course overview Requirements, logistics Image formation 2 Introductions Instructor: Prof. Kristen Grauman grauman @ cs TAY 4.118, Thurs 2-4 pm TA: Sudheendra
Computer Vision Thursday, August 30 1 Today Course overview Requirements, logistics Image formation 2 Introductions Instructor: Prof. Kristen Grauman grauman @ cs TAY 4.118, Thurs 2-4 pm TA: Sudheendra
Computational Photography and Video. Prof. Marc Pollefeys
 Computational Photography and Video Prof. Marc Pollefeys Today s schedule Introduction of Computational Photography Course facts Syllabus Digital Photography What is computational photography Convergence
Computational Photography and Video Prof. Marc Pollefeys Today s schedule Introduction of Computational Photography Course facts Syllabus Digital Photography What is computational photography Convergence
Techniques. Introduction to Drawing Final Exam Study Guide
 Introduction to Drawing Final Exam Study Guide There are many ways to draw: line-based, value-based, reverse drawing these are just a few. This studyguide will break down your drawing study by techniques
Introduction to Drawing Final Exam Study Guide There are many ways to draw: line-based, value-based, reverse drawing these are just a few. This studyguide will break down your drawing study by techniques
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt.
 CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Session 1 - Introduction Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering Lab e-mail:
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Session 1 - Introduction Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering Lab e-mail:
MICA at ImageClef 2013 Plant Identification Task
 MICA at ImageClef 2013 Plant Identification Task Thi-Lan LE, Ngoc-Hai PHAM International Research Institute MICA UMI2954 HUST Thi-Lan.LE@mica.edu.vn, Ngoc-Hai.Pham@mica.edu.vn I. Introduction In the framework
MICA at ImageClef 2013 Plant Identification Task Thi-Lan LE, Ngoc-Hai PHAM International Research Institute MICA UMI2954 HUST Thi-Lan.LE@mica.edu.vn, Ngoc-Hai.Pham@mica.edu.vn I. Introduction In the framework
Super resolution with Epitomes
 Super resolution with Epitomes Aaron Brown University of Wisconsin Madison, WI Abstract Techniques exist for aligning and stitching photos of a scene and for interpolating image data to generate higher
Super resolution with Epitomes Aaron Brown University of Wisconsin Madison, WI Abstract Techniques exist for aligning and stitching photos of a scene and for interpolating image data to generate higher
Cameras. CSE 455, Winter 2010 January 25, 2010
 Cameras CSE 455, Winter 2010 January 25, 2010 Announcements New Lecturer! Neel Joshi, Ph.D. Post-Doctoral Researcher Microsoft Research neel@cs Project 1b (seam carving) was due on Friday the 22 nd Project
Cameras CSE 455, Winter 2010 January 25, 2010 Announcements New Lecturer! Neel Joshi, Ph.D. Post-Doctoral Researcher Microsoft Research neel@cs Project 1b (seam carving) was due on Friday the 22 nd Project
Object Perception. 23 August PSY Object & Scene 1
 Object Perception Perceiving an object involves many cognitive processes, including recognition (memory), attention, learning, expertise. The first step is feature extraction, the second is feature grouping
Object Perception Perceiving an object involves many cognitive processes, including recognition (memory), attention, learning, expertise. The first step is feature extraction, the second is feature grouping
Vision. Definition. Sensing of objects by the light reflected off the objects into our eyes
 Vision Vision Definition Sensing of objects by the light reflected off the objects into our eyes Only occurs when there is the interaction of the eyes and the brain (Perception) What is light? Visible
Vision Vision Definition Sensing of objects by the light reflected off the objects into our eyes Only occurs when there is the interaction of the eyes and the brain (Perception) What is light? Visible
Image Analysis & Searching
 Image Analysis & Searching 1 Searching Photos Look for photos like this one: Look for beach photos Look for photos taken Sept. 15, 2000 Look for photos with: Look for photos with Aunt Thelma 2 Annotating
Image Analysis & Searching 1 Searching Photos Look for photos like this one: Look for beach photos Look for photos taken Sept. 15, 2000 Look for photos with: Look for photos with Aunt Thelma 2 Annotating
Human Vision and Human-Computer Interaction. Much content from Jeff Johnson, UI Wizards, Inc.
 Human Vision and Human-Computer Interaction Much content from Jeff Johnson, UI Wizards, Inc. are these guidelines grounded in perceptual psychology and how can we apply them intelligently? Mach bands:
Human Vision and Human-Computer Interaction Much content from Jeff Johnson, UI Wizards, Inc. are these guidelines grounded in perceptual psychology and how can we apply them intelligently? Mach bands:
Computational and Biological Vision
 Introduction to Computational and Biological Vision CS 202-1-5261 Computer Science Department, BGU Ohad Ben-Shahar Some necessary administrivia Lecturer : Ohad Ben-Shahar Email address : ben-shahar@cs.bgu.ac.il
Introduction to Computational and Biological Vision CS 202-1-5261 Computer Science Department, BGU Ohad Ben-Shahar Some necessary administrivia Lecturer : Ohad Ben-Shahar Email address : ben-shahar@cs.bgu.ac.il
Vision Review: Image Processing. Course web page:
 Vision Review: Image Processing Course web page: www.cis.udel.edu/~cer/arv September 7, Announcements Homework and paper presentation guidelines are up on web page Readings for next Tuesday: Chapters 6,.,
Vision Review: Image Processing Course web page: www.cis.udel.edu/~cer/arv September 7, Announcements Homework and paper presentation guidelines are up on web page Readings for next Tuesday: Chapters 6,.,
Ant? Bird? Dog? Human -SURE
 ECE 172A: Intelligent Systems: Introduction Week 1 (October 1, 2007): Course Introduction and Announcements Intelligent Robots as Intelligent Systems A systems perspective of Intelligent Robots and capabilities
ECE 172A: Intelligent Systems: Introduction Week 1 (October 1, 2007): Course Introduction and Announcements Intelligent Robots as Intelligent Systems A systems perspective of Intelligent Robots and capabilities
DIGITAL IMAGE PROCESSING
 DIGITAL IMAGE PROCESSING Lecture 1 Introduction Tammy Riklin Raviv Electrical and Computer Engineering Ben-Gurion University of the Negev 2 Introduction to Digital Image Processing Lecturer: Dr. Tammy
DIGITAL IMAGE PROCESSING Lecture 1 Introduction Tammy Riklin Raviv Electrical and Computer Engineering Ben-Gurion University of the Negev 2 Introduction to Digital Image Processing Lecturer: Dr. Tammy
Geog183: Cartographic Design and Geovisualization Spring Quarter 2018 Lecture 2: The human vision system
 Geog183: Cartographic Design and Geovisualization Spring Quarter 2018 Lecture 2: The human vision system Bottom line Use GIS or other mapping software to create map form, layout and to handle data Pass
Geog183: Cartographic Design and Geovisualization Spring Quarter 2018 Lecture 2: The human vision system Bottom line Use GIS or other mapping software to create map form, layout and to handle data Pass
Frequencies and Color
 Frequencies and Color Alexei Efros, CS280, Spring 2018 Salvador Dali Gala Contemplating the Mediterranean Sea, which at 30 meters becomes the portrait of Abraham Lincoln, 1976 Spatial Frequencies and
Frequencies and Color Alexei Efros, CS280, Spring 2018 Salvador Dali Gala Contemplating the Mediterranean Sea, which at 30 meters becomes the portrait of Abraham Lincoln, 1976 Spatial Frequencies and
Lecture 8. Human Information Processing (1) CENG 412-Human Factors in Engineering May
 CENG 412-Human Factors in Engineering May") Lecture 8. Human Information Processing (1) CENG 412-Human Factors in Engineering May 30 2009 1 Outline Visual Sensory systems Reading Wickens pp. 61-91 2 Today s story: Textbook page 61. List the vision-related
Lecture 8. Human Information Processing (1) CENG 412-Human Factors in Engineering May 30 2009 1 Outline Visual Sensory systems Reading Wickens pp. 61-91 2 Today s story: Textbook page 61. List the vision-related
Carmen Alonso Montes 23rd-27th November 2015
 Practical Computer Vision: Theory & Applications calonso@bcamath.org 23rd-27th November 2015 Alternative Software Alternative software to matlab Octave Available for Linux, Mac and windows For Mac and
Practical Computer Vision: Theory & Applications calonso@bcamath.org 23rd-27th November 2015 Alternative Software Alternative software to matlab Octave Available for Linux, Mac and windows For Mac and
Image Filtering in Spatial domain. Computer Vision Jia-Bin Huang, Virginia Tech
 Image Filtering in Spatial domain Computer Vision Jia-Bin Huang, Virginia Tech Administrative stuffs Lecture schedule changes Office hours - Jia-Bin (44 Whittemore Hall) Friday at : AM 2: PM Office hours
Image Filtering in Spatial domain Computer Vision Jia-Bin Huang, Virginia Tech Administrative stuffs Lecture schedule changes Office hours - Jia-Bin (44 Whittemore Hall) Friday at : AM 2: PM Office hours
EC-433 Digital Image Processing
 EC-433 Digital Image Processing Lecture 2 Digital Image Fundamentals Dr. Arslan Shaukat 1 Fundamental Steps in DIP Image Acquisition An image is captured by a sensor (such as a monochrome or color TV camera)
EC-433 Digital Image Processing Lecture 2 Digital Image Fundamentals Dr. Arslan Shaukat 1 Fundamental Steps in DIP Image Acquisition An image is captured by a sensor (such as a monochrome or color TV camera)
3D Interaction using Hand Motion Tracking. Srinath Sridhar Antti Oulasvirta
 3D Interaction using Hand Motion Tracking Srinath Sridhar Antti Oulasvirta EIT ICT Labs Smart Spaces Summer School 05-June-2013 Speaker Srinath Sridhar PhD Student Supervised by Prof. Dr. Christian Theobalt
3D Interaction using Hand Motion Tracking Srinath Sridhar Antti Oulasvirta EIT ICT Labs Smart Spaces Summer School 05-June-2013 Speaker Srinath Sridhar PhD Student Supervised by Prof. Dr. Christian Theobalt
23270: AUGMENTED REALITY FOR NAVIGATION AND INFORMATIONAL ADAS. Sergii Bykov Technical Lead Machine Learning 12 Oct 2017
 23270: AUGMENTED REALITY FOR NAVIGATION AND INFORMATIONAL ADAS Sergii Bykov Technical Lead Machine Learning 12 Oct 2017 Product Vision Company Introduction Apostera GmbH with headquarter in Munich, was
23270: AUGMENTED REALITY FOR NAVIGATION AND INFORMATIONAL ADAS Sergii Bykov Technical Lead Machine Learning 12 Oct 2017 Product Vision Company Introduction Apostera GmbH with headquarter in Munich, was
Chapter 12 Image Processing
 Chapter 12 Image Processing The distance sensor on your self-driving car detects an object 100 m in front of your car. Are you following the car in front of you at a safe distance or has a pedestrian jumped
Chapter 12 Image Processing The distance sensor on your self-driving car detects an object 100 m in front of your car. Are you following the car in front of you at a safe distance or has a pedestrian jumped
PRACTICAL IMAGE AND VIDEO PROCESSING USING MATLAB
 PRACTICAL IMAGE AND VIDEO PROCESSING USING MATLAB OGE MARQUES Florida Atlantic University *IEEE IEEE PRESS WWILEY A JOHN WILEY & SONS, INC., PUBLICATION CONTENTS LIST OF FIGURES LIST OF TABLES FOREWORD
PRACTICAL IMAGE AND VIDEO PROCESSING USING MATLAB OGE MARQUES Florida Atlantic University *IEEE IEEE PRESS WWILEY A JOHN WILEY & SONS, INC., PUBLICATION CONTENTS LIST OF FIGURES LIST OF TABLES FOREWORD
License Plate Localisation based on Morphological Operations
 License Plate Localisation based on Morphological Operations Xiaojun Zhai, Faycal Benssali and Soodamani Ramalingam School of Engineering & Technology University of Hertfordshire, UH Hatfield, UK Abstract
License Plate Localisation based on Morphological Operations Xiaojun Zhai, Faycal Benssali and Soodamani Ramalingam School of Engineering & Technology University of Hertfordshire, UH Hatfield, UK Abstract
What you see is not what you get. Grade Level: 3-12 Presentation time: minutes, depending on which activities are chosen
 Optical Illusions What you see is not what you get The purpose of this lesson is to introduce students to basic principles of visual processing. Much of the lesson revolves around the use of visual illusions
Optical Illusions What you see is not what you get The purpose of this lesson is to introduce students to basic principles of visual processing. Much of the lesson revolves around the use of visual illusions
Image processing for gesture recognition: from theory to practice. Michela Goffredo University Roma TRE
 Image processing for gesture recognition: from theory to practice 2 Michela Goffredo University Roma TRE goffredo@uniroma3.it Image processing At this point we have all of the basics at our disposal. We
Image processing for gesture recognition: from theory to practice 2 Michela Goffredo University Roma TRE goffredo@uniroma3.it Image processing At this point we have all of the basics at our disposal. We
Physics 2310 Lab #5: Thin Lenses and Concave Mirrors Dr. Michael Pierce (Univ. of Wyoming)
") Physics 2310 Lab #5: Thin Lenses and Concave Mirrors Dr. Michael Pierce (Univ. of Wyoming) Purpose: The purpose of this lab is to introduce students to some of the properties of thin lenses and mirrors.
Physics 2310 Lab #5: Thin Lenses and Concave Mirrors Dr. Michael Pierce (Univ. of Wyoming) Purpose: The purpose of this lab is to introduce students to some of the properties of thin lenses and mirrors.
8.2 IMAGE PROCESSING VERSUS IMAGE ANALYSIS Image processing: The collection of routines and
 8.1 INTRODUCTION In this chapter, we will study and discuss some fundamental techniques for image processing and image analysis, with a few examples of routines developed for certain purposes. 8.2 IMAGE
8.1 INTRODUCTION In this chapter, we will study and discuss some fundamental techniques for image processing and image analysis, with a few examples of routines developed for certain purposes. 8.2 IMAGE
Machine Learning for Intelligent Transportation Systems
 Machine Learning for Intelligent Transportation Systems Patrick Emami (CISE), Anand Rangarajan (CISE), Sanjay Ranka (CISE), Lily Elefteriadou (CE) MALT Lab, UFTI September 6, 2018 ITS - A Broad Perspective
Machine Learning for Intelligent Transportation Systems Patrick Emami (CISE), Anand Rangarajan (CISE), Sanjay Ranka (CISE), Lily Elefteriadou (CE) MALT Lab, UFTI September 6, 2018 ITS - A Broad Perspective
Content Based Image Retrieval Using Color Histogram
 Content Based Image Retrieval Using Color Histogram Nitin Jain Assistant Professor, Lokmanya Tilak College of Engineering, Navi Mumbai, India. Dr. S. S. Salankar Professor, G.H. Raisoni College of Engineering,
Content Based Image Retrieval Using Color Histogram Nitin Jain Assistant Professor, Lokmanya Tilak College of Engineering, Navi Mumbai, India. Dr. S. S. Salankar Professor, G.H. Raisoni College of Engineering,
Prof Trivedi ECE253A Notes for Students only
 ECE 253A: Digital Processing: Course Related Class Website: https://sites.google.com/a/eng.ucsd.edu/ece253fall2017/ Course Graduate Assistants: Nachiket Deo Borhan Vasili Kirill Pirozenko Piazza Grading:
ECE 253A: Digital Processing: Course Related Class Website: https://sites.google.com/a/eng.ucsd.edu/ece253fall2017/ Course Graduate Assistants: Nachiket Deo Borhan Vasili Kirill Pirozenko Piazza Grading:
Image Processing & Projective geometry
 Image Processing & Projective geometry Arunkumar Byravan Partial slides borrowed from Jianbo Shi & Steve Seitz Color spaces RGB Red, Green, Blue HSV Hue, Saturation, Value Why HSV? HSV separates luma,
Image Processing & Projective geometry Arunkumar Byravan Partial slides borrowed from Jianbo Shi & Steve Seitz Color spaces RGB Red, Green, Blue HSV Hue, Saturation, Value Why HSV? HSV separates luma,
Unit IV: Sensation & Perception. Module 19 Vision Organization & Interpretation
 Unit IV: Sensation & Perception Module 19 Vision Organization & Interpretation Visual Organization 19-1 Perceptual Organization 19-1 How do we form meaningful perceptions from sensory information? A group
Unit IV: Sensation & Perception Module 19 Vision Organization & Interpretation Visual Organization 19-1 Perceptual Organization 19-1 How do we form meaningful perceptions from sensory information? A group
VEHICLE LICENSE PLATE DETECTION ALGORITHM BASED ON STATISTICAL CHARACTERISTICS IN HSI COLOR MODEL
 VEHICLE LICENSE PLATE DETECTION ALGORITHM BASED ON STATISTICAL CHARACTERISTICS IN HSI COLOR MODEL Instructor : Dr. K. R. Rao Presented by: Prasanna Venkatesh Palani (1000660520) prasannaven.palani@mavs.uta.edu
VEHICLE LICENSE PLATE DETECTION ALGORITHM BASED ON STATISTICAL CHARACTERISTICS IN HSI COLOR MODEL Instructor : Dr. K. R. Rao Presented by: Prasanna Venkatesh Palani (1000660520) prasannaven.palani@mavs.uta.edu
CPSC 425: Computer Vision
 1 / 55 CPSC 425: Computer Vision Instructor: Fred Tung ftung@cs.ubc.ca Department of Computer Science University of British Columbia Lecture Notes 2015/2016 Term 2 2 / 55 Menu January 7, 2016 Topics: Image
1 / 55 CPSC 425: Computer Vision Instructor: Fred Tung ftung@cs.ubc.ca Department of Computer Science University of British Columbia Lecture Notes 2015/2016 Term 2 2 / 55 Menu January 7, 2016 Topics: Image
Morphological Image Processing Approach of Vehicle Detection for Real-Time Traffic Analysis
 Morphological Image Processing Approach of Vehicle Detection for Real-Time Traffic Analysis Prutha Y M *1, Department Of Computer Science and Engineering Affiliated to VTU Belgaum, Karnataka Rao Bahadur
Morphological Image Processing Approach of Vehicle Detection for Real-Time Traffic Analysis Prutha Y M *1, Department Of Computer Science and Engineering Affiliated to VTU Belgaum, Karnataka Rao Bahadur
Lecture # 01. Introduction
 Digital Image Processing Lecture # 01 Introduction Autumn 2012 Agenda Why image processing? Image processing examples Course plan History of imaging Fundamentals of image processing Components of image
Digital Image Processing Lecture # 01 Introduction Autumn 2012 Agenda Why image processing? Image processing examples Course plan History of imaging Fundamentals of image processing Components of image
CSE 473/573 Computer Vision and Image Processing (CVIP)
") CSE 473/573 Computer Vision and Image Processing (CVIP) Ifeoma Nwogu inwogu@buffalo.edu Lecture 4 Image formation(part I) Schedule Last class linear algebra overview Today Image formation and camera properties
CSE 473/573 Computer Vision and Image Processing (CVIP) Ifeoma Nwogu inwogu@buffalo.edu Lecture 4 Image formation(part I) Schedule Last class linear algebra overview Today Image formation and camera properties
FACE DETECTION. Sahar Noor Abdal ID: Mashook Mujib Chowdhury ID:
 FACE DETECTION Sahar Noor Abdal ID: 05310049 Mashook Mujib Chowdhury ID: 05310052 Department of Computer Science and Engineering January 2008 ii DECLARATION We hereby declare that this thesis is based
FACE DETECTION Sahar Noor Abdal ID: 05310049 Mashook Mujib Chowdhury ID: 05310052 Department of Computer Science and Engineering January 2008 ii DECLARATION We hereby declare that this thesis is based
Fixing the Gaussian Blur : the Bilateral Filter
 Fixing the Gaussian Blur : the Bilateral Filter Lecturer: Jianbing Shen Email : shenjianbing@bit.edu.cnedu Office room : 841 http://cs.bit.edu.cn/shenjianbing cn/shenjianbing Note: contents copied from
Fixing the Gaussian Blur : the Bilateral Filter Lecturer: Jianbing Shen Email : shenjianbing@bit.edu.cnedu Office room : 841 http://cs.bit.edu.cn/shenjianbing cn/shenjianbing Note: contents copied from
Midterm Examination CS 534: Computational Photography
 Midterm Examination CS 534: Computational Photography November 3, 2015 NAME: SOLUTIONS Problem Score Max Score 1 8 2 8 3 9 4 4 5 3 6 4 7 6 8 13 9 7 10 4 11 7 12 10 13 9 14 8 Total 100 1 1. [8] What are
Midterm Examination CS 534: Computational Photography November 3, 2015 NAME: SOLUTIONS Problem Score Max Score 1 8 2 8 3 9 4 4 5 3 6 4 7 6 8 13 9 7 10 4 11 7 12 10 13 9 14 8 Total 100 1 1. [8] What are
Computer Vision. The Pinhole Camera Model
 Computer Vision The Pinhole Camera Model Filippo Bergamasco (filippo.bergamasco@unive.it) http://www.dais.unive.it/~bergamasco DAIS, Ca Foscari University of Venice Academic year 2017/2018 Imaging device
Computer Vision The Pinhole Camera Model Filippo Bergamasco (filippo.bergamasco@unive.it) http://www.dais.unive.it/~bergamasco DAIS, Ca Foscari University of Venice Academic year 2017/2018 Imaging device
Main Subject Detection of Image by Cropping Specific Sharp Area
 Main Subject Detection of Image by Cropping Specific Sharp Area FOTIOS C. VAIOULIS 1, MARIOS S. POULOS 1, GEORGE D. BOKOS 1 and NIKOLAOS ALEXANDRIS 2 Department of Archives and Library Science Ionian University
Main Subject Detection of Image by Cropping Specific Sharp Area FOTIOS C. VAIOULIS 1, MARIOS S. POULOS 1, GEORGE D. BOKOS 1 and NIKOLAOS ALEXANDRIS 2 Department of Archives and Library Science Ionian University
Advanced Techniques for Mobile Robotics Location-Based Activity Recognition
 Advanced Techniques for Mobile Robotics Location-Based Activity Recognition Wolfram Burgard, Cyrill Stachniss, Kai Arras, Maren Bennewitz Activity Recognition Based on L. Liao, D. J. Patterson, D. Fox,
Advanced Techniques for Mobile Robotics Location-Based Activity Recognition Wolfram Burgard, Cyrill Stachniss, Kai Arras, Maren Bennewitz Activity Recognition Based on L. Liao, D. J. Patterson, D. Fox,
the dimensionality of the world Travelling through Space and Time Learning Outcomes Johannes M. Zanker
 Travelling through Space and Time Johannes M. Zanker http://www.pc.rhul.ac.uk/staff/j.zanker/ps1061/l4/ps1061_4.htm 05/02/2015 PS1061 Sensation & Perception #4 JMZ 1 Learning Outcomes at the end of this
Travelling through Space and Time Johannes M. Zanker http://www.pc.rhul.ac.uk/staff/j.zanker/ps1061/l4/ps1061_4.htm 05/02/2015 PS1061 Sensation & Perception #4 JMZ 1 Learning Outcomes at the end of this
CSC321 Lecture 11: Convolutional Networks
 CSC321 Lecture 11: Convolutional Networks Roger Grosse Roger Grosse CSC321 Lecture 11: Convolutional Networks 1 / 35 Overview What makes vision hard? Vison needs to be robust to a lot of transformations
CSC321 Lecture 11: Convolutional Networks Roger Grosse Roger Grosse CSC321 Lecture 11: Convolutional Networks 1 / 35 Overview What makes vision hard? Vison needs to be robust to a lot of transformations
IV: Visual Organization and Interpretation
 IV: Visual Organization and Interpretation Describe Gestalt psychologists understanding of perceptual organization, and explain how figure-ground and grouping principles contribute to our perceptions Explain
IV: Visual Organization and Interpretation Describe Gestalt psychologists understanding of perceptual organization, and explain how figure-ground and grouping principles contribute to our perceptions Explain
Human Vision. Human Vision - Perception
 1 Human Vision SPATIAL ORIENTATION IN FLIGHT 2 Limitations of the Senses Visual Sense Nonvisual Senses SPATIAL ORIENTATION IN FLIGHT 3 Limitations of the Senses Visual Sense Nonvisual Senses Sluggish source
1 Human Vision SPATIAL ORIENTATION IN FLIGHT 2 Limitations of the Senses Visual Sense Nonvisual Senses SPATIAL ORIENTATION IN FLIGHT 3 Limitations of the Senses Visual Sense Nonvisual Senses Sluggish source
Haptics CS327A
 Haptics CS327A - 217 hap tic adjective relating to the sense of touch or to the perception and manipulation of objects using the senses of touch and proprioception 1 2 Slave Master 3 Courtesy of Walischmiller
Haptics CS327A - 217 hap tic adjective relating to the sense of touch or to the perception and manipulation of objects using the senses of touch and proprioception 1 2 Slave Master 3 Courtesy of Walischmiller
An Automatic System for Detecting the Vehicle Registration Plate from Video in Foggy and Rainy Environments using Restoration Technique
 An Automatic System for Detecting the Vehicle Registration Plate from Video in Foggy and Rainy Environments using Restoration Technique Savneet Kaur M.tech (CSE) GNDEC LUDHIANA Kamaljit Kaur Dhillon Assistant
An Automatic System for Detecting the Vehicle Registration Plate from Video in Foggy and Rainy Environments using Restoration Technique Savneet Kaur M.tech (CSE) GNDEC LUDHIANA Kamaljit Kaur Dhillon Assistant
Teaching Scheme. Credits Assigned (hrs/week) Theory Practical Tutorial Theory Oral & Tutorial Total
 Theory Practical Tutorial Theory Oral & Tutorial Total") Code ITC7051 Name Processing Teaching Scheme Credits Assigned (hrs/week) Theory Practical Tutorial Theory Oral & Tutorial Total Practical 04 02 -- 04 01 -- 05 Code ITC704 Name Wireless Technology Examination
Code ITC7051 Name Processing Teaching Scheme Credits Assigned (hrs/week) Theory Practical Tutorial Theory Oral & Tutorial Total Practical 04 02 -- 04 01 -- 05 Code ITC704 Name Wireless Technology Examination