CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt.
|
|
|
- Myrtle Sharp
- 5 years ago
- Views:
Transcription
1 CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Session 1 - Introduction Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering Lab mgolpar@illinois.edu Department of Civil and Environmental Engineering, University of Illinois at Urbana-Champaign
2 Outline Introduction Class Logistics What is Visual Sensing? Geometry Low & Mid-level vision High level vision Next Class 2
3 Mani Golparvar-Fard, Ph.D. Assistant Professor of Civil Engineering, Dec 12 - present Dept. of Civil and Environmental Engineering University of Illinois, Urbana-Champaign Director of the Real-time and Automated Monitoring and Control (RAAMAC) lab Co-founder Vision Construction Monitoring Ltd., Aug11-present PAR WORKS Inc., Jul 12-present An Allied Minds Company 3
4 Mani Golparvar-Fard, Ph.D. Education and Academic Background Assistant Professor of Civil Engineering, Aug10 Dec 12 Via Dept. of Civil and Environmental Engineering Myers-Lawson School of Construction Ph.D., Civil & Environmental Eng., Univ. of Illinois, Urbana-Champaign Construction Management, July 2010 M.Cs., Computer Science, Univ. of Illinois, Urbana-Champaign Computer Vision and Machine Learning, May 2010 M.A.Sc., Civil & Environmental Engineering, Univ. of British Columbia Project & Construction Management, 2006 M.Sc., Civil & Environmental Engineering, IUST 1 Civil Engineering, 2005 B.Sc., Civil & Environmental Engineering, IUST Civil Engineering, Iran Univ. of Science & Technology 4
5 Mani Golparvar-Fard, Ph.D. (Cont d) Professional Experience International Experience in Construction, Structure and Hydro-Structure Design, and Process Development Joint Venture of Perlit Construction Co. & Tehran-Berkeley Managers and Consulting Engineers Tehran-Berkeley Managers and Consulting Engineers Talan-Sazeh Construction Turner Construction (2.5 yrs) Ikenberry Dining and Residential Hall Silver LEED Construction Projects, Champaign, IL. Giken Seisakusho Co., Ltd. 5
6 Mani Golparvar-Fard, Ph.D. (Cont d) Teaching and Research Experience Currently, Assistant Professor, Dept. of Civil & Env. Engrg. University of Illinois, Urbana-Champaign, Dec Present Formerly Assistant Professor, Dept. of Civil & Env. Engrg. and Myers-Lawson School of Construction, Virginia Tech, Aug 2010-Dec 2012 Research Assistant, Department of Civil & Env. Engrg., University of Illinois, Urbana-Champaign, Research Interest: Computer Vision Sensing and Augmented Reality Visualization of Building and Construction Performance Metrics Integrated As-Built Building Information Modeling Rapid Energy Modeling of Existing Buildings Using Thermal and Digital Imagery Remote Pre and Post-Disaster Analysis of Critical Physical Infrastructures 6
7 Mani Golparvar-Fard, Ph.D. (Cont d) Current & Previous Professional Services ASCE Currently an Associate Member Vice-Chair, Data Sensing and Analysis Committee, TCCIT, ASCE, present Student Member, Treasurer, UIUC ASCE Student Chapter, Construction Management Association of America Faculty Advisor, Sustainable Construction Group, Co-Founder and Vice-President, UIUC CMAA Student Chapter, UIUC Faculty-Student Senate Elected by all graduate students from all disciplines on campus (three times for three years),
8 Youngjib Ham Education Ph.D student, Dept. of Civil & Env. Engrg. University of Illinois at Urbana-Champaign (present) M.Sc., Architectural Engrg, Dept. of Architecture Engrg. Seoul National University, B.Sc., Civil Engineering, Dept. of Civil & Env. Engrg. Seoul National University, Research Interest Energy Performance Augmented Reality (EPAR) Vision based-building diagnostics and retrofit analysis 8
9 Office Hours & Locations Mani Golparvar-Fard Tue & Thu 05:30 pm 07:00 pm or by appointment 3129D Newmark Civil Engineering Laboratory Youngjib Ham Mon & Wed 12:00 pm 1:00 pm 2112 Newmark Civil Engineering Laboratory 9
10 Getting to Know You Introduce Yourself Name Your department and area of concentration Your research topic (if any) Tell us one interesting fact about yourself that no one knows 10
11 Readers Course Notes and Supplementary Material will be available for download from Compass2g Text Books S HZ FP Computer Vision: Algorithms and Applications, by R. Szeliski, Springer, Multiple View Geometry in Computer Vision, by R. Hartley and A. Zisserman, Academic Press, Computer Vision, A Modern Approach, by D.A. Forsyth and J. Ponce, Prentice Hall,
12 Readers Instructional Approach Lectures/ Discussions in the classroom Assignment from a selected set of topics Paper presentation from a particular topic of interest Term Project Project Proposal Mid Semester Project Report and Presentation Term Project Report and Presentation 12
13 Communication Course website Syllabus Class Schedule Course Content Assignments & Assignment Solutions Wikipage Graded Assignments Answer to your Questions Post all question on: Wikipage All course related questions will only be answered on the Wikipage You can also answer questions on the WikiPage This is part of class participation For other course related issues or in case if you are not able to post your questions on the Wikipage, please send an with subject line [CEE598] directly to the instructor: Mani Golparvar 13
14 Course Schedule Session Day Reading Assignment Project Due Date Topic Chapter Due Out Due 1 Tue 150Jan No Class 2 Thu 17-Jan Course Introduction & Administration 3 Tue 22-Jan Review of Linear Algebra and Geometric Transformations 4 Thu 24-Jan Camera Models and Projective Geometry S30-98, FP1&2, HZ6&8 5 Tue 29-Jan Camera Calibration FP3, HZ7 6 Thu 31-Jan Single View Metrology HZ2,3&8 7 Tue 5-Feb Presentation by Prof. Niebles (UDC) A1 8 Thu 7-Feb Review of Assignment #1, Single View Metrology 9 Tue 12-Feb Single View Metrology 10 Thu 14-Feb Pixels and Image Filtering FP7&8 A2 11 Tue 19-Feb Linear Filters A1 12 Thu 21-Feb Feature Detectors, Descriptors P1 13 Tue 26-Feb Feature Detectors, Descriptors FP 8&9 14 Thu 28-Feb Feature Detectors, Descriptors II 15 Tue 5-Mar Segmentation and Clustering FP14 16 Thu 7-Mar Epipolar Geometry HZ4,9&11; FP10 A2 17 Tue 12-Mar Stereo Systems and Volumetric Stereo HZ11, FP11 A3 18 Thu 14-Mar Shape from Reflections 19 Tue 19-Mar No Class- Spring Break 20 Thu 21-Mar No Class- Spring Break 21 Tue 26-Mar Structure from Motion - Affine HZ6,14&18; FP12 22 Thu 28-Mar Structure from Motion - Perspective HZ10,18&19; FP13 P2 23 Tue 2-Apr Fitting and Matching HZ4&11, FP16 A4 A3 24 Thu 4-Apr Optical Flow and Tracking 25 Tue 9-Apr Introduction to Object Recognition - Single Instances 26 Thu 11-Apr Object Recognition - Bag of Words Models S * A5 27 Tue 16-Apr Object Recognition - 2D/3D Part Based Models * A4 28 Thu 18-Apr D4AR Automated Monitoring * 29 Tue Personnel and Equipment Tracking and Applications for 23-Apr Structural and Transportation Engineering * 30 Thu 25-Apr Presentation by Dr. Furukawa (Google) * A5 32 Tue 30-Apr Final Project Presentation P3 14
15 Course Evaluation Class participation 5% Assignments 40% The grade for written assignments and submitted codes (5 assignments) Paper Presentation 10% 1 Presentation (1 or 2 papers) Final term project Project proposal and progress report 5% Project report 30% Project presentation 10% 15
16 Grading Policy Late policy for machine problems and project 0-24 hours late deduct 50%. More than 24 hours late deduct 100%. Collaboration policy Read the Honor system, understand what is collaboration and what is academic infraction Discussing project assignment with each other is allowed, but coding must be done individually 16
17 Paper Presentations To help you master a specific topic on application of visual sensing for AEC industry. Your presentation should present the key ideas of the assigned works and explain important technical aspects. On the wikipage, there will be a separate section for each presentation, where students will be able to post their comments. 17
18 Term Project Replicate an interesting paper Comparing different methods to a test bed A new approach to an existing problem Original research Write a 10-page paper summarizing your results Release the final code Give a presentation We will discuss projects in the next class Important dates: look up class schedule 18
19 Term Project Form your teams 1-3 people The quality is judged regardless of the number of people on a team Evaluation Quality of the project (including writing) Final ~20 minutes project presentation in class students will vote your presentation For final code and paper due dates please consult webpage 19

20 Wikipage Access to WikiPage 20
21 Reminders Please check Wikipage for answers before ing the instructor. Subject line: [CEE598] You must attend project sessions. Acknowledge of any help received should be noted on the cover-page of assignments. Not all aspects of the text will be discussed during the course. 21
22 Photosynth 22
23 Augmented Reality maps 23
24 Volvo Safety System 24

25 Tracking Pedestrians in Real-time 25
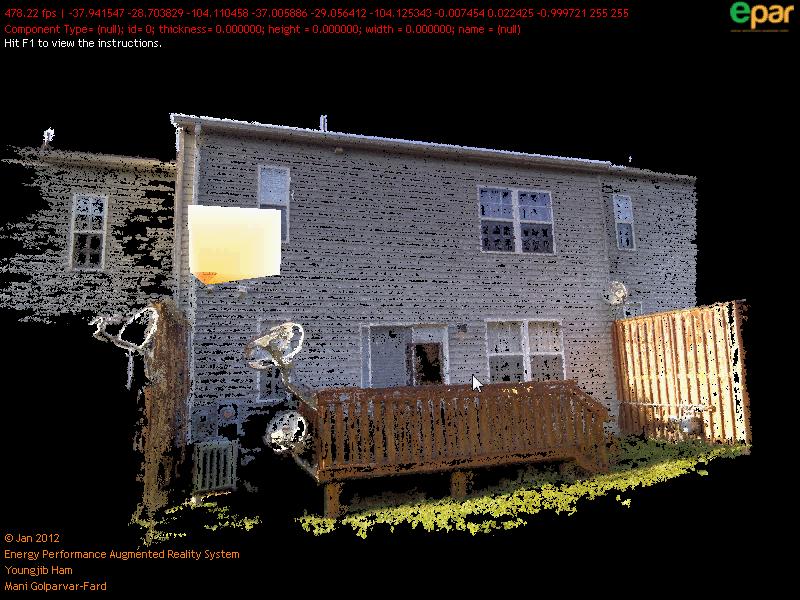
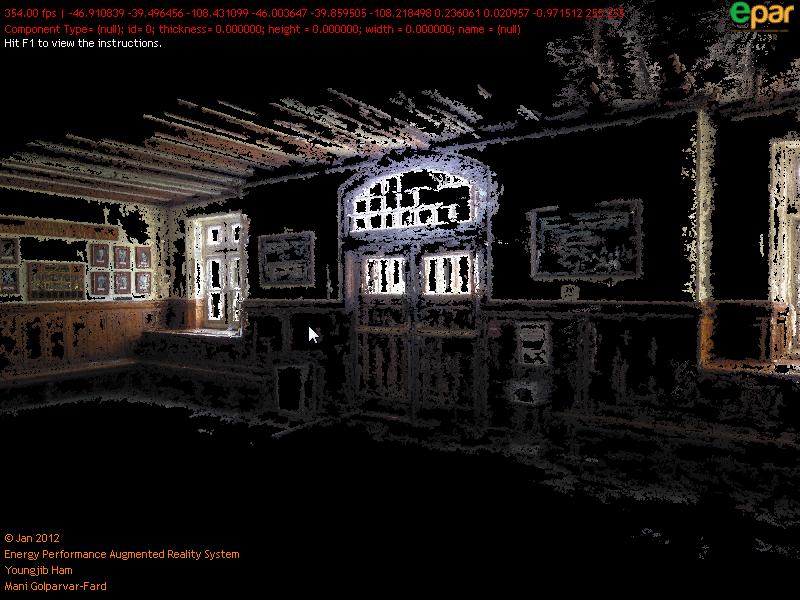
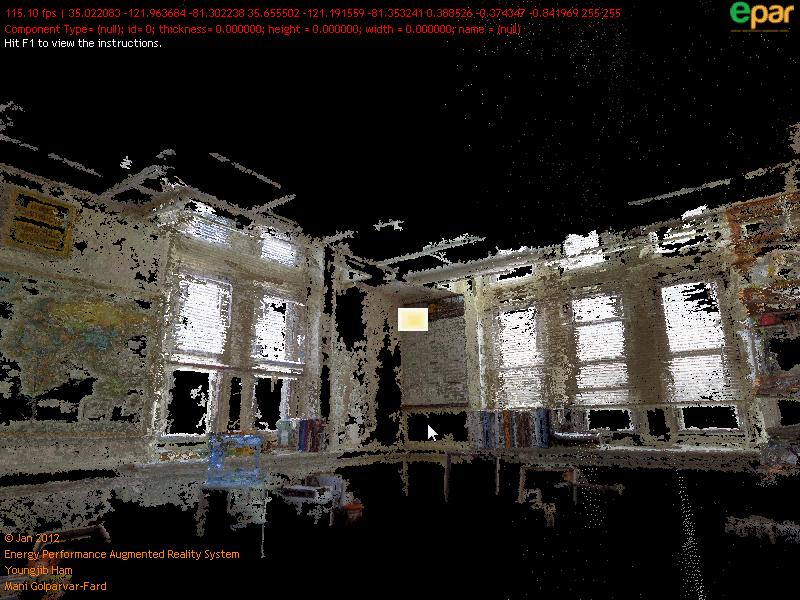
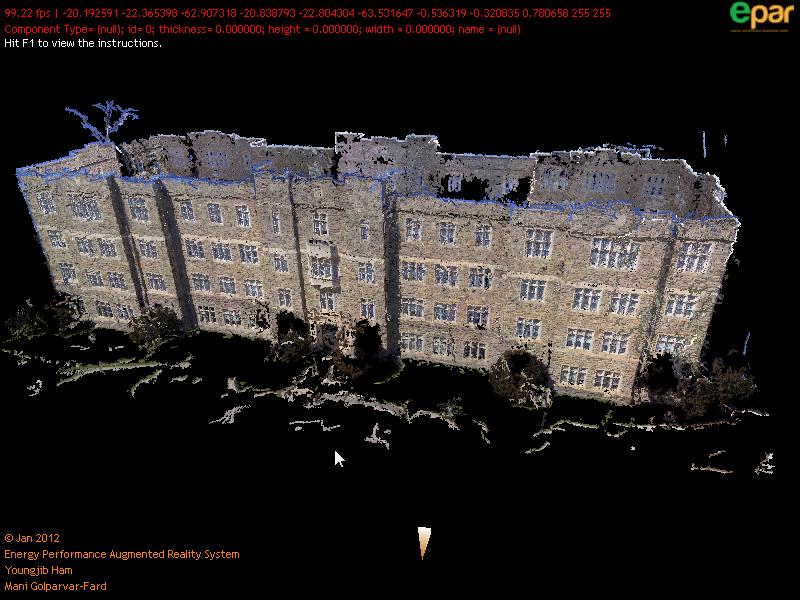
26 Energy Performance Modeling 26
27 Mobile Augmented Reality System 27
28 Construction Activity Analysis 28
29 What do you see in this picture? Student Dining Hall Construction Project, Champaign, IL August
30 Visual Sensing for Civil Infra. Eng & Mgmt. Image/video Object 1 Object N - semantic -semantic Student Dining Hall Construction Project, Champaign, IL August
31 Visual Sensing for Civil Infra. Eng & Mgmt. Image/video Object 1 Object N - semantic -semantic Student Dining Hall Construction Project, Champaign, IL August
32 Visual Sensing for Civil Infra. Eng & Mgmt. Image/video Object 1 Object N - semantic - Geometry -Semantic - Geometry spatial & temporal relations Student Dining Hall Construction Project, Champaign, IL August

33 Visual Sensing for Civil Infra. Eng & Mgmt. Image/video Object 1 Object N - semantic - Geometry -Semantic - Geometry Student Dining Hall Construction Project, Champaign, IL August 2008 spatial & temporal relations Scene -Semantic - geometry 33



34 Visual Sensing Studying the tools and theories that enable the design of machines that can extract useful information from imagery data (Images and videos) toward the goal of interpreting a scene Scene Objects People Actions Sensing device Computational device Information: visual cues, 3D structure, motion flows, etc Interpretation: recognize objects, scenes, actions, events Extract information Interpretation 34






35 Semantic Actions, Events Have we reached humans? not yet computer vision is still no match for human perception but catching up, particularly in certain areas Categorization Object Recognition 3D modeling 3D scenes Source: S. Savarese Physical attributes 35


36 Is it useful to study how the visual system works? After all: However: The goals of computer vision are intimately related to what humans care about. -Study visual system to inspire ideas for algorithmic solutions in computational vision - Half of primate cerebral cortex is devoted to visual processing! -Use computer vision as a benchmark for computational theories in human vision 36 Sources: S. Savarese


37 Successful Applications Finger prints recognizer 37 Sources: L. Fei-Fei

38 Medical Imaging 38

39 Special effects movies - videogames 39 Sources: L. Fei-Fei

40 Consumer applications 40

41 Nikon S60 ads about the Face Detection Feature 41

42 Robotics






43 Applications of computer vision Factory inspection Assistive technologies Surveillance Autonomous driving, robot navigation Sources: S. Savarese, K. Grauman, L. Fei-Fei, S. Laznebick Driver assistance (collision warning, lane departure warning, rear object detection) Security 43
44 Automatic control Robotics Robot vision Signal processing Compression Image Filter Filter Banks Biological vision Visual Psychophysics Neurobiology Data mining Image retrivial Vision-based Visual pattern recognition Machine learning Artificial intelligence Sensing Statistics Geometry Optimization Applied math Optics Smart cameras Acquisition methods Physics Imaging Computer graphics 44
45 CEE598 Course Overview 1. Geometry 2. Low & Mid-level vision 3. High level vision 45
46 CEE598 Course Overview 1. Geometry 2. Low & Mid-level vision 3. High level vision Geometry: - How to extract 3D information? - Which cues are useful? - What are the mathematical tools? 46

47 Visual cues: texture shading contours shadows reflections 47 Sources: S. Savarese
48 Visual cues: texture shading contours shadows reflections 48 Sources: S. Savarese
49 Visual cues: texture shading contours shadows reflections 49 Sources: S. Savarese
50 Vision techniques Visual cues: texture shading contours shadows reflections 50 Sources: S. Savarese

51 Visual cues: texture shading contours shadows reflections 51 Sources: S. Savarese
52 Vision techniques Visual cues: texture shading contours shadows reflections Number of observers: monocular multiple views Sources: S. Savarese camera 52
53 Vision techniques Visual cues: texture shading contours shadows reflections Number of observers: monocular multiple views Sources: S. Savarese camera 1 camera 2 camera N 53


")



54 Stereo Epipolar geometry Tomasi & Kanade (1993) Structure from motion Image sources: S. Laznebick Projective structure from motion: Here be dragons! 54
 Temporary structures, site")
 3D reconstruction of")

55 Structure from Motion (b) Image View 3D View (a) Temporary structures, site profile, foundation walls, and slab rebars are reconstructed (c) 3D reconstruction of a building skeleton elements using 12 existing images with 2Mpixel resolution (Golparvar-Fard 2011) 55

56 Camera Tracking and VR insertion Courtesy of Oxford Visual Geometry Group 56
57 Vision techniques Visual cues: texture shading contours shadows reflections Number of observers: monocular multiple views Active lighting: laser stripes structured lighting patterns Sources: S. Savarese camera Laser/projector/light 57


58 3D Laser Scanning Scanning Michelangelo s The David The Digital Michelangelo Project BILLION polygons, accuracy to.29mm 58 Courtesy of Stanford computer graphics lab
59 Virtual Replay EyeVision Technology introduced in 2001 Courtesy of EyeVision 60
60 CEE598 Course Overview 1. Geometry 2. Low & Mid-level vision 3. High level vision Mid-level vision: - Extract useful building blocks - Region segmentation - Motion flows 61



61 Extract Useful Building Blocks 62 Sources: S. Savarese

62 Automatic Panorama Stitching 63 Sources: M. Brown

63 Automatic Panorama Stitching 64 Sources: M. Brown

64 Feature Detection and Tracking Courtesy of Jean-Yves Bouguet Vision Lab, CalTech 65
65 CEE598 Course Overview 1. Geometry 2. Low & Mid-level vision 3. High level vision High level operations: Recognition of objects and people Places Actions and events 66



66 Challenges: viewpoint variation Michelangelo slide credit: Fei-Fei, Fergus & Torralba 67
 01/02/2005; 4:02:00")
")
 01/16/2005; 3:03:00")
")


67 Challenges: illumination (a) 01/02/2005; 4:02:00 PM (b) 01/04/2005; 4:02:00 PM (c) 01/13/2005; 4:00:00 PM (a) 01/16/2005; 3:03:00 PM (b) 01/16/2005; 4:03:00 PM (c) 01/16/2005; 5:03:00 PM Project: Institute of Genomic Biology, Courtesy of College of ACES, UIUC 68 Sources: Golparvar-Fard et al. (2009)

68 Challenges: scale 69



69 Challenges: deformation 70

70 Challenges: occlusion Visible Unchanged Occluded Changed Visible Changed Dynamic Occlusion Static Occlusion Superintendent Occluded Unchanged Shadow Student Dining Hall Construction Project, Champaign, IL - 8/27/

71 Challenges: background clutter 72





72 Challenges: object intra-class variation 73

73 Learn to categorize motion Ramanan, D., Forsyth, D. A., Zisserman, A. " Tracking People by Learning their Appearance"IEEE Pattern Analysis and Machine Intelligence (PAMI). Jan

74 Learn to categorize motion Ramanan, D., Forsyth, D. A., Zisserman, A. " Tracking People by Learning their Appearance"IEEE Pattern Analysis and Machine Intelligence (PAMI). Jan

75 What do you see in this picture? Student Dining Hall Construction Project, Champaign, IL August

76 What is Available to you? Microsoft Kinect What Can you use it for? Real-time 3D Reconstruction of Building Interior Automated Productivity, Safety, and Occupational Health Assessment of Workers 77


77 What is Available to you? Mobile Workstation Chariot What Can you use it for? Rapid 3D Reconstruction of Building Interior Automated Building Stability Assessment and Rescue Operations 78


 What")



78 What is Available to you? Cameras!!! Ocular Hardhats (OH2) What Can you use it for? All kinds of Applications Where Can I find these? Raamac Lab 79

79 Raamac Lab More Ideas? Check our Research Project Page 80
80 Next lecture Review of linear algebra for multi-view geometry Basic image transformations Mini-Assignments Watch the following video Illinois Compass2g Site> Resources> Supplementary Documents> 3DVision.avi Study Matlab Tutorials and get familiar with available resources for coding -> Wiki> Matlab > First Two Links 81
Today I t n d ro ucti tion to computer vision Course overview Course requirements
 COMP 776: Computer Vision Today Introduction ti to computer vision i Course overview Course requirements The goal of computer vision To extract t meaning from pixels What we see What a computer sees Source:
COMP 776: Computer Vision Today Introduction ti to computer vision i Course overview Course requirements The goal of computer vision To extract t meaning from pixels What we see What a computer sees Source:
COMP 776: Computer Vision
 COMP 776: Computer Vision Basic Info Instructor: Svetlana Lazebnik (lazebnik@cs.unc.edu) Office hours: By appointment, FB 244 Textbook (recommended): Forsyth & Ponce, Computer Vision: A Modern Approach
COMP 776: Computer Vision Basic Info Instructor: Svetlana Lazebnik (lazebnik@cs.unc.edu) Office hours: By appointment, FB 244 Textbook (recommended): Forsyth & Ponce, Computer Vision: A Modern Approach
Introduction. BIL719 Computer Vision Pinar Duygulu Hacettepe University
 Introduction BIL719 Computer Vision Pinar Duygulu Hacettepe University Basic Info Textbooks (suggested): Forsyth & Ponce, Computer Vision: A Modern Approach Richard Szeliski, Computer Vision: Algorithms
Introduction BIL719 Computer Vision Pinar Duygulu Hacettepe University Basic Info Textbooks (suggested): Forsyth & Ponce, Computer Vision: A Modern Approach Richard Szeliski, Computer Vision: Algorithms
Spring 2018 CS543 / ECE549 Computer Vision. Course webpage URL:
 Spring 2018 CS543 / ECE549 Computer Vision Course webpage URL: http://slazebni.cs.illinois.edu/spring18/ The goal of computer vision To extract meaning from pixels What we see What a computer sees Source:
Spring 2018 CS543 / ECE549 Computer Vision Course webpage URL: http://slazebni.cs.illinois.edu/spring18/ The goal of computer vision To extract meaning from pixels What we see What a computer sees Source:
Introduction. Visual data acquisition devices. The goal of computer vision. The goal of computer vision. Vision as measurement device
 Spring 15 CIS 5543 Computer Vision Visual data acquisition devices Introduction Haibin Ling http://www.dabi.temple.edu/~hbling/teaching/15s_5543/index.html Revised from S. Lazebnik The goal of computer
Spring 15 CIS 5543 Computer Vision Visual data acquisition devices Introduction Haibin Ling http://www.dabi.temple.edu/~hbling/teaching/15s_5543/index.html Revised from S. Lazebnik The goal of computer
Lecture 1 Introduction to Computer Vision. Lin ZHANG, PhD School of Software Engineering, Tongji University Spring 2015
 Lecture 1 Introduction to Computer Vision Lin ZHANG, PhD School of Software Engineering, Tongji University Spring 2015 Course Info Contact Information Room 314, Jishi Building Email: cslinzhang@tongji.edu.cn
Lecture 1 Introduction to Computer Vision Lin ZHANG, PhD School of Software Engineering, Tongji University Spring 2015 Course Info Contact Information Room 314, Jishi Building Email: cslinzhang@tongji.edu.cn
Lecture 1 Introduction to Computer Vision. Lin ZHANG, PhD School of Software Engineering, Tongji University Spring 2014
 Lecture 1 Introduction to Computer Vision Lin ZHANG, PhD School of Software Engineering, Tongji University Spring 2014 Course Info Contact Information Room 314, Jishi Building Email: cslinzhang@tongji.edu.cn
Lecture 1 Introduction to Computer Vision Lin ZHANG, PhD School of Software Engineering, Tongji University Spring 2014 Course Info Contact Information Room 314, Jishi Building Email: cslinzhang@tongji.edu.cn
CENG 595 Selected Topics in Computer Engineering Computer Vision. Zafer ARICAN, PhD
 CENG 595 Selected Topics in Computer Engineering Computer Vision Zafer ARICAN, PhD Today Administrivia What is Computer Vision? Why is it a difficult problem? State-of-the art Brief course syllabus Instructor
CENG 595 Selected Topics in Computer Engineering Computer Vision Zafer ARICAN, PhD Today Administrivia What is Computer Vision? Why is it a difficult problem? State-of-the art Brief course syllabus Instructor
Computer Vision Lecture 1
 Computer Vision Lecture 1 Introduction 19.10.2016 Bastian Leibe Visual Computing Institute RWTH Aachen University http://www.vision.rwth-aachen.de/ leibe@vision.rwth-aachen.de Organization Lecturer Prof.
Computer Vision Lecture 1 Introduction 19.10.2016 Bastian Leibe Visual Computing Institute RWTH Aachen University http://www.vision.rwth-aachen.de/ leibe@vision.rwth-aachen.de Organization Lecturer Prof.
CSE 408 Multimedia Information System
 CSE 408 Multimedia Information System Intro to Images & Vision Yezhou Yang Lots of slides from Tamara Berg and L. Feifei Intro to Computer Vision Source: L. Lazebnik The goal of computer vision To perceive
CSE 408 Multimedia Information System Intro to Images & Vision Yezhou Yang Lots of slides from Tamara Berg and L. Feifei Intro to Computer Vision Source: L. Lazebnik The goal of computer vision To perceive
Lecture 1 Introduction to Computer Vision. Lin ZHANG, PhD School of Software Engineering, Tongji University Spring 2018
 Lecture 1 Introduction to Computer Vision Lin ZHANG, PhD School of Software Engineering, Tongji University Spring 2018 Course Info Contact Information Room 408L, Jishi Building Email: cslinzhang@tongji.edu.cn
Lecture 1 Introduction to Computer Vision Lin ZHANG, PhD School of Software Engineering, Tongji University Spring 2018 Course Info Contact Information Room 408L, Jishi Building Email: cslinzhang@tongji.edu.cn
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt.
 CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Session 7 Pixels and Image Filtering Mani Golparvar-Fard Department of Civil and Environmental Engineering 329D, Newmark Civil Engineering
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Session 7 Pixels and Image Filtering Mani Golparvar-Fard Department of Civil and Environmental Engineering 329D, Newmark Civil Engineering
ELE 882: Introduction to Digital Image Processing (DIP)
") ELE882 Introduction to Digital Image Processing Course Instructor: Prof. Ling Guan Department of Electrical & Computer Engineering Room 315, ENG Building Tel: (416)979-5000 ext 6072 Email: lguan@ee.ryerson.ca
ELE882 Introduction to Digital Image Processing Course Instructor: Prof. Ling Guan Department of Electrical & Computer Engineering Room 315, ENG Building Tel: (416)979-5000 ext 6072 Email: lguan@ee.ryerson.ca
Computer Vision. Thursday, August 30
 Computer Vision Thursday, August 30 1 Today Course overview Requirements, logistics Image formation 2 Introductions Instructor: Prof. Kristen Grauman grauman @ cs TAY 4.118, Thurs 2-4 pm TA: Sudheendra
Computer Vision Thursday, August 30 1 Today Course overview Requirements, logistics Image formation 2 Introductions Instructor: Prof. Kristen Grauman grauman @ cs TAY 4.118, Thurs 2-4 pm TA: Sudheendra
CS6550 Computer Vision
 CS6550 Computer Vision Class Meeting: M7M8 (3:30pm 5:20pm), R6 (2:20pm 3:10pm). Rm 106 Delta Bldg., 台達館 106 室 Instructor: Prof. Shang-Hong Lai, Rm. 636 Delta Bldg., 賴尚宏, 台達館 636 室, Tel: ext. 42958, Email:
CS6550 Computer Vision Class Meeting: M7M8 (3:30pm 5:20pm), R6 (2:20pm 3:10pm). Rm 106 Delta Bldg., 台達館 106 室 Instructor: Prof. Shang-Hong Lai, Rm. 636 Delta Bldg., 賴尚宏, 台達館 636 室, Tel: ext. 42958, Email:
CSE 473/573 Computer Vision and Image Processing (CVIP) Ifeoma Nwogu
 Ifeoma Nwogu") CSE 473/573 Computer Vision and Image Processing (CVIP) Ifeoma Nwogu inwogu@buffalo.edu Today Logistics Schedule Introductions What is computer vision? Why is vision so hard? Prerequisites This course
CSE 473/573 Computer Vision and Image Processing (CVIP) Ifeoma Nwogu inwogu@buffalo.edu Today Logistics Schedule Introductions What is computer vision? Why is vision so hard? Prerequisites This course
Today. CS 395T Visual Recognition. Course content. Administration. Expectations. Paper reviews
 Today CS 395T Visual Recognition Course logistics Overview Volunteers, prep for next week Thursday, January 18 Administration Class: Tues / Thurs 12:30-2 PM Instructor: Kristen Grauman grauman at cs.utexas.edu
Today CS 395T Visual Recognition Course logistics Overview Volunteers, prep for next week Thursday, January 18 Administration Class: Tues / Thurs 12:30-2 PM Instructor: Kristen Grauman grauman at cs.utexas.edu
CIS 849: Autonomous Robot Vision
 CIS 849: Autonomous Robot Vision Instructor: Christopher Rasmussen Course web page: www.cis.udel.edu/~cer/arv September 5, 2002 Purpose of this Course To provide an introduction to the uses of visual sensing
CIS 849: Autonomous Robot Vision Instructor: Christopher Rasmussen Course web page: www.cis.udel.edu/~cer/arv September 5, 2002 Purpose of this Course To provide an introduction to the uses of visual sensing
OBJECTIVE OF THE BOOK ORGANIZATION OF THE BOOK
 xv Preface Advancement in technology leads to wide spread use of mounting cameras to capture video imagery. Such surveillance cameras are predominant in commercial institutions through recording the cameras
xv Preface Advancement in technology leads to wide spread use of mounting cameras to capture video imagery. Such surveillance cameras are predominant in commercial institutions through recording the cameras
CSCE 763: Digital Image Processing
 CSCE 763: Digital Image Processing Spring 2018 Yan Tong Department of Computer Science and Engineering University of South Carolina Today s Agenda Welcome Tentative Syllabus Topics covered in the course
CSCE 763: Digital Image Processing Spring 2018 Yan Tong Department of Computer Science and Engineering University of South Carolina Today s Agenda Welcome Tentative Syllabus Topics covered in the course
THE VISIONLAB TEAM engineers - 1 physicist. Feasibility study and prototyping Hardware benchmarking Open and closed source libraries
 VISIONLAB OPENING THE VISIONLAB TEAM 2018 6 engineers - 1 physicist Feasibility study and prototyping Hardware benchmarking Open and closed source libraries Deep learning frameworks GPU frameworks FPGA
VISIONLAB OPENING THE VISIONLAB TEAM 2018 6 engineers - 1 physicist Feasibility study and prototyping Hardware benchmarking Open and closed source libraries Deep learning frameworks GPU frameworks FPGA
A NEW NEUROMORPHIC STRATEGY FOR THE FUTURE OF VISION FOR MACHINES June Xavier Lagorce Head of Computer Vision & Systems
 A NEW NEUROMORPHIC STRATEGY FOR THE FUTURE OF VISION FOR MACHINES June 2017 Xavier Lagorce Head of Computer Vision & Systems Imagine meeting the promise of Restoring sight to the blind Accident-free autonomous
A NEW NEUROMORPHIC STRATEGY FOR THE FUTURE OF VISION FOR MACHINES June 2017 Xavier Lagorce Head of Computer Vision & Systems Imagine meeting the promise of Restoring sight to the blind Accident-free autonomous
Digitalisation as day-to-day-business
 Digitalisation as day-to-day-business What is today feasible for the company in the future Prof. Jivka Ovtcharova INSTITUTE FOR INFORMATION MANAGEMENT IN ENGINEERING Baden-Württemberg Driving force for
Digitalisation as day-to-day-business What is today feasible for the company in the future Prof. Jivka Ovtcharova INSTITUTE FOR INFORMATION MANAGEMENT IN ENGINEERING Baden-Württemberg Driving force for
Welcome to EGN-1935: Electrical & Computer Engineering (Ad)Ventures
Ventures") : ECE (Ad)Ventures Welcome to -: Electrical & Computer Engineering (Ad)Ventures This is the first Educational Technology Class in UF s ECE Department We are Dr. Schwartz and Dr. Arroyo. University of Florida,
: ECE (Ad)Ventures Welcome to -: Electrical & Computer Engineering (Ad)Ventures This is the first Educational Technology Class in UF s ECE Department We are Dr. Schwartz and Dr. Arroyo. University of Florida,
Lecture 19: Depth Cameras. Kayvon Fatahalian CMU : Graphics and Imaging Architectures (Fall 2011)
") Lecture 19: Depth Cameras Kayvon Fatahalian CMU 15-869: Graphics and Imaging Architectures (Fall 2011) Continuing theme: computational photography Cheap cameras capture light, extensive processing produces
Lecture 19: Depth Cameras Kayvon Fatahalian CMU 15-869: Graphics and Imaging Architectures (Fall 2011) Continuing theme: computational photography Cheap cameras capture light, extensive processing produces
Introduction to Remote Sensing of the Environment. Dr. Anne Nolin Department of Geosciences
 Introduction to Remote Sensing of the Environment Dr. Anne Nolin Department of Geosciences Overview of today s lecture Course overview Definitions How measurements are made Analog vs. digital The remote
Introduction to Remote Sensing of the Environment Dr. Anne Nolin Department of Geosciences Overview of today s lecture Course overview Definitions How measurements are made Analog vs. digital The remote
23270: AUGMENTED REALITY FOR NAVIGATION AND INFORMATIONAL ADAS. Sergii Bykov Technical Lead Machine Learning 12 Oct 2017
 23270: AUGMENTED REALITY FOR NAVIGATION AND INFORMATIONAL ADAS Sergii Bykov Technical Lead Machine Learning 12 Oct 2017 Product Vision Company Introduction Apostera GmbH with headquarter in Munich, was
23270: AUGMENTED REALITY FOR NAVIGATION AND INFORMATIONAL ADAS Sergii Bykov Technical Lead Machine Learning 12 Oct 2017 Product Vision Company Introduction Apostera GmbH with headquarter in Munich, was
CSE 455: Computer Vision
 CSE 455: Computer Vision Instructors TAs Neel Joshi neel@cs Ira Kemelmacher kemelmi@cs Ian Simon iansimon@cs Rahul Garg rahul@cs Jiun-Hung Chen jhchen@cs Web Page http://www.cs.washington.edu/455 Time:
CSE 455: Computer Vision Instructors TAs Neel Joshi neel@cs Ira Kemelmacher kemelmi@cs Ian Simon iansimon@cs Rahul Garg rahul@cs Jiun-Hung Chen jhchen@cs Web Page http://www.cs.washington.edu/455 Time:
Lecture # 01. Introduction
 Digital Image Processing Lecture # 01 Introduction Autumn 2012 Agenda Why image processing? Image processing examples Course plan History of imaging Fundamentals of image processing Components of image
Digital Image Processing Lecture # 01 Introduction Autumn 2012 Agenda Why image processing? Image processing examples Course plan History of imaging Fundamentals of image processing Components of image
DIGITAL IMAGE PROCESSING
 DIGITAL IMAGE PROCESSING Lecture 1 Introduction Tammy Riklin Raviv Electrical and Computer Engineering Ben-Gurion University of the Negev 2 Introduction to Digital Image Processing Lecturer: Dr. Tammy
DIGITAL IMAGE PROCESSING Lecture 1 Introduction Tammy Riklin Raviv Electrical and Computer Engineering Ben-Gurion University of the Negev 2 Introduction to Digital Image Processing Lecturer: Dr. Tammy
Curriculum Vitae. Computer Vision, Image Processing, Biometrics. Computer Vision, Vision Rehabilitation, Vision Science
 Curriculum Vitae Date Prepared: 01/09/2016 (last updated: 09/12/2016) Name: Shrinivas J. Pundlik Education 07/2002 B.E. (Bachelor of Engineering) Electronics Engineering University of Pune, Pune, India
Curriculum Vitae Date Prepared: 01/09/2016 (last updated: 09/12/2016) Name: Shrinivas J. Pundlik Education 07/2002 B.E. (Bachelor of Engineering) Electronics Engineering University of Pune, Pune, India
CS 534: Computer Vision
 CS 534: Computer Vision Spring 2005 Ahmed Elgammal Dept of Computer Science Computer Vision Introduction - 1 Outlines Vision What and Why? Human vision Computer vision General computer vision applications
CS 534: Computer Vision Spring 2005 Ahmed Elgammal Dept of Computer Science Computer Vision Introduction - 1 Outlines Vision What and Why? Human vision Computer vision General computer vision applications
Computational and Biological Vision
 Introduction to Computational and Biological Vision CS 202-1-5261 Computer Science Department, BGU Ohad Ben-Shahar Some necessary administrivia Lecturer : Ohad Ben-Shahar Email address : ben-shahar@cs.bgu.ac.il
Introduction to Computational and Biological Vision CS 202-1-5261 Computer Science Department, BGU Ohad Ben-Shahar Some necessary administrivia Lecturer : Ohad Ben-Shahar Email address : ben-shahar@cs.bgu.ac.il
COMPSCI 372 S2 C Computer Graphics
 COMPSCI 372 S2 C Computer Graphics Burkhard Wünsche 1, Christof Lutteroth 2 1 Graphics Group 2 Software Innovation Research Group IMPORTANT ANNOUNCEMENT Departmental Policy on Cheating on Assignments 1.
COMPSCI 372 S2 C Computer Graphics Burkhard Wünsche 1, Christof Lutteroth 2 1 Graphics Group 2 Software Innovation Research Group IMPORTANT ANNOUNCEMENT Departmental Policy on Cheating on Assignments 1.
Digital Image Processing COSC 6380/4393
 Digital Image Processing COSC 6380/4393 Lecture 1 Aug 21 st, 2018 Slides from Dr. Shishir K Shah and Frank (Qingzhong) Liu Digital Image Processing COSC 6380/4393 Instructor Pranav Mantini Email: pmantini@uh.edu
Digital Image Processing COSC 6380/4393 Lecture 1 Aug 21 st, 2018 Slides from Dr. Shishir K Shah and Frank (Qingzhong) Liu Digital Image Processing COSC 6380/4393 Instructor Pranav Mantini Email: pmantini@uh.edu
High Level Computer Vision. Introduction - April 16, Bernt Schiele & Mario Fritz MPI Informatics and Saarland University, Saarbrücken, Germany
 Perceptual and Sensory Augmented Computing High Level Computer Vision Introduction - April 16, 2014 MPI Informatics and Saarland University, Saarbrücken, Germany http://www.d2.mpi-inf.mpg.de/cv Computer
Perceptual and Sensory Augmented Computing High Level Computer Vision Introduction - April 16, 2014 MPI Informatics and Saarland University, Saarbrücken, Germany http://www.d2.mpi-inf.mpg.de/cv Computer
Autonomous Mobile Robot Design. Dr. Kostas Alexis (CSE)
") Autonomous Mobile Robot Design Dr. Kostas Alexis (CSE) Course Goals To introduce students into the holistic design of autonomous robots - from the mechatronic design to sensors and intelligence. Develop
Autonomous Mobile Robot Design Dr. Kostas Alexis (CSE) Course Goals To introduce students into the holistic design of autonomous robots - from the mechatronic design to sensors and intelligence. Develop
Digital Image Processing ECE 178 Winter 2003
 Digital Image Processing ECE 178 Winter 2003 B. S. MANJUNATH RM 3157 ENGR I Tel:893-7112 manj@ece.ucsb.edu http://vision.ece.ucsb.edu/manjunath 1/07/2003 W03/Lecture 1 On the WEB For course information
Digital Image Processing ECE 178 Winter 2003 B. S. MANJUNATH RM 3157 ENGR I Tel:893-7112 manj@ece.ucsb.edu http://vision.ece.ucsb.edu/manjunath 1/07/2003 W03/Lecture 1 On the WEB For course information
Digital Image Processing ECE 178 Winter On the WEB. Class list/discussion sessions. Today: Jan About this course.
 Digital Image Processing ECE 178 Winter 2003 On the WEB For course information and slides and more: http://varuna.ece.ucsb.edu/ece178 B. S. MANJUNATH RM 3157 ENGR I Tel:893-7112 manj@ece.ucsb.edu http://vision.ece.ucsb.edu/manjunath
Digital Image Processing ECE 178 Winter 2003 On the WEB For course information and slides and more: http://varuna.ece.ucsb.edu/ece178 B. S. MANJUNATH RM 3157 ENGR I Tel:893-7112 manj@ece.ucsb.edu http://vision.ece.ucsb.edu/manjunath
Visual Imaging in the Electronic Age An Interdisciplinary Course Bridging Art, Architecture, Computer Science, and Engineering Offered in Fall 2016
 Candice Zhao, a student in the ART 2907 Fall 2015 course, tries Oculus headset goggles. A 2-D version of the immersive 3-D scene is shown on the screen behind her. Visual Imaging in the Electronic Age
Candice Zhao, a student in the ART 2907 Fall 2015 course, tries Oculus headset goggles. A 2-D version of the immersive 3-D scene is shown on the screen behind her. Visual Imaging in the Electronic Age
On-site Safety Management Using Image Processing and Fuzzy Inference
 1013 On-site Safety Management Using Image Processing and Fuzzy Inference Hongjo Kim 1, Bakri Elhamim 2, Hoyoung Jeong 3, Changyoon Kim 4, and Hyoungkwan Kim 5 1 Graduate Student, School of Civil and Environmental
1013 On-site Safety Management Using Image Processing and Fuzzy Inference Hongjo Kim 1, Bakri Elhamim 2, Hoyoung Jeong 3, Changyoon Kim 4, and Hyoungkwan Kim 5 1 Graduate Student, School of Civil and Environmental
Engineering, & Mathematics
 8O260 Applied Mathematics for Technical Professionals (R) 1 credit Gr: 10-12 Prerequisite: Recommended prerequisites: Algebra I and Geometry Description: (SGHS only) Applied Mathematics for Technical Professionals
8O260 Applied Mathematics for Technical Professionals (R) 1 credit Gr: 10-12 Prerequisite: Recommended prerequisites: Algebra I and Geometry Description: (SGHS only) Applied Mathematics for Technical Professionals
Bridge Condition Assessment Using Remote Sensors
 A Summary of the 4th Quarterly Report for the Technical Activities Council Bridge Condition Assessment Using Remote Sensors Michigan Technological University USDOT Cooperative Agreement No. DTOS59-10-H-00001
A Summary of the 4th Quarterly Report for the Technical Activities Council Bridge Condition Assessment Using Remote Sensors Michigan Technological University USDOT Cooperative Agreement No. DTOS59-10-H-00001
CPSC 425: Computer Vision
 1 / 55 CPSC 425: Computer Vision Instructor: Fred Tung ftung@cs.ubc.ca Department of Computer Science University of British Columbia Lecture Notes 2015/2016 Term 2 2 / 55 Menu January 7, 2016 Topics: Image
1 / 55 CPSC 425: Computer Vision Instructor: Fred Tung ftung@cs.ubc.ca Department of Computer Science University of British Columbia Lecture Notes 2015/2016 Term 2 2 / 55 Menu January 7, 2016 Topics: Image
Computer Vision Introduction or
 Computer Vision Introduction http://www.ugrad.cs.jhu.edu/~cs461 or http://cirl.lcsr.jhu.edu/vision_syllabus Professor Hager http://www.cs.jhu.edu/~hager Outline for Today Outline and Organization of the
Computer Vision Introduction http://www.ugrad.cs.jhu.edu/~cs461 or http://cirl.lcsr.jhu.edu/vision_syllabus Professor Hager http://www.cs.jhu.edu/~hager Outline for Today Outline and Organization of the
The Human Visual System!
 an engineering-focused introduction to! The Human Visual System! EE367/CS448I: Computational Imaging and Display! stanford.edu/class/ee367! Lecture 2! Gordon Wetzstein! Stanford University! nautilus eye,
an engineering-focused introduction to! The Human Visual System! EE367/CS448I: Computational Imaging and Display! stanford.edu/class/ee367! Lecture 2! Gordon Wetzstein! Stanford University! nautilus eye,
GRADUATE PROGRAMMES Semester 2 Examination EXAM TIMETABLE
 PAGE: 1 OF 10 12-Mar-2018 (Mon) SBS TUTORIAL ROOM TR+5 BS7010 PRACTICAL COURSE IN ELECTRON MICROSCOPY & IMAGE PROCESSING OF MACROMOLECULAR COMPLEXES 12-Apr-2018 (Thu) SBS CLASSROOM 4 BS7005 PRACTICAL COURSE
PAGE: 1 OF 10 12-Mar-2018 (Mon) SBS TUTORIAL ROOM TR+5 BS7010 PRACTICAL COURSE IN ELECTRON MICROSCOPY & IMAGE PROCESSING OF MACROMOLECULAR COMPLEXES 12-Apr-2018 (Thu) SBS CLASSROOM 4 BS7005 PRACTICAL COURSE
COMP371 COMPUTER GRAPHICS SESSION 1 COURSE OVERVIEW - SYLLABUS
 COMP371 COMPUTER GRAPHICS SESSION 1 COURSE OVERVIEW - SYLLABUS Lecture Overview Introduction to the class Introduction to Computer Graphics and OpenGL Programming 2 Introductions Charalambos [Charis] Poullis
COMP371 COMPUTER GRAPHICS SESSION 1 COURSE OVERVIEW - SYLLABUS Lecture Overview Introduction to the class Introduction to Computer Graphics and OpenGL Programming 2 Introductions Charalambos [Charis] Poullis
(15-862): Computational Photography
: Computational Photography") 15-463 (15-862): Computational Photography Staff Prof: Alexei Efros (efros@cs), 4207 NSH TA: Mohit Gupta (mohitg@cs) Web Page http://graphics.cs.cmu.edu/courses/15-463/ Newsgroup: cmu.cs.class.cs463 Today
15-463 (15-862): Computational Photography Staff Prof: Alexei Efros (efros@cs), 4207 NSH TA: Mohit Gupta (mohitg@cs) Web Page http://graphics.cs.cmu.edu/courses/15-463/ Newsgroup: cmu.cs.class.cs463 Today
- Basics of informatics - Computer network - Software engineering - Intelligent media processing - Human interface. Professor. Professor.
 - Basics of informatics - Computer network - Software engineering - Intelligent media processing - Human interface Computer-Aided Engineering Research of power/signal integrity analysis and EMC design
- Basics of informatics - Computer network - Software engineering - Intelligent media processing - Human interface Computer-Aided Engineering Research of power/signal integrity analysis and EMC design
Proposal Smart Vision Sensors for Entomologically Inspired Micro Aerial Vehicles Daniel Black. Advisor: Dr. Reid Harrison
 Proposal Smart Vision Sensors for Entomologically Inspired Micro Aerial Vehicles Daniel Black Advisor: Dr. Reid Harrison Introduction Impressive digital imaging technology has become commonplace in our
Proposal Smart Vision Sensors for Entomologically Inspired Micro Aerial Vehicles Daniel Black Advisor: Dr. Reid Harrison Introduction Impressive digital imaging technology has become commonplace in our
Digital image processing vs. computer vision Higher-level anchoring
 Digital image processing vs. computer vision Higher-level anchoring Václav Hlaváč Czech Technical University in Prague Faculty of Electrical Engineering, Department of Cybernetics Center for Machine Perception
Digital image processing vs. computer vision Higher-level anchoring Václav Hlaváč Czech Technical University in Prague Faculty of Electrical Engineering, Department of Cybernetics Center for Machine Perception
Introduction to Computer Vision
 Introduction to Computer Vision by James Hays Image by kirkh.deviantart.com Categories of the SUN database What is Computer Vision? Computer Vision and Nearby Fields Computer Graphics: Models to Images
Introduction to Computer Vision by James Hays Image by kirkh.deviantart.com Categories of the SUN database What is Computer Vision? Computer Vision and Nearby Fields Computer Graphics: Models to Images
SFR 406 Remote Sensing, Image Interpretation, and Forest Mapping Spring Semester 2015
 SFR 406 Remote Sensing, Image Interpretation, and Forest Mapping Spring Semester 2015 Course Description: Vertical and horizontal measurements from aerial photos, orthophotos, and topographic maps. Fundamentals
SFR 406 Remote Sensing, Image Interpretation, and Forest Mapping Spring Semester 2015 Course Description: Vertical and horizontal measurements from aerial photos, orthophotos, and topographic maps. Fundamentals
Changjiang Yang. Computer Vision, Pattern Recognition, Machine Learning, Robotics, and Scientific Computing.
 Changjiang Yang Mailing Address: Department of Computer Science University of Maryland College Park, MD 20742 Lab Phone: (301)405-8366 Cell Phone: (410)299-9081 Fax: (301)314-9658 Email: yangcj@cs.umd.edu
Changjiang Yang Mailing Address: Department of Computer Science University of Maryland College Park, MD 20742 Lab Phone: (301)405-8366 Cell Phone: (410)299-9081 Fax: (301)314-9658 Email: yangcj@cs.umd.edu
University of Wisconsin-Madison, Nelson Institute for Environmental Studies September 2, 2014
 University of Wisconsin-Madison, Nelson Institute for Environmental Studies September 2, 2014 The Earth from Above Introduction to Environmental Remote Sensing Lectures: Tuesday, Thursday 2:30-3:45 pm,
University of Wisconsin-Madison, Nelson Institute for Environmental Studies September 2, 2014 The Earth from Above Introduction to Environmental Remote Sensing Lectures: Tuesday, Thursday 2:30-3:45 pm,
CS686: Robot Motion Planning and Applications
 CS686: Robot Motion Planning and Applications Sung-Eui Yoon ( 윤성의 ) Course URL: http://sglab.kaist.ac.kr/~sungeui/mpa About the Instructor Main research theme Work on large-scale problems related to motion
CS686: Robot Motion Planning and Applications Sung-Eui Yoon ( 윤성의 ) Course URL: http://sglab.kaist.ac.kr/~sungeui/mpa About the Instructor Main research theme Work on large-scale problems related to motion
Image Processing Based Vehicle Detection And Tracking System
 Image Processing Based Vehicle Detection And Tracking System Poonam A. Kandalkar 1, Gajanan P. Dhok 2 ME, Scholar, Electronics and Telecommunication Engineering, Sipna College of Engineering and Technology,
Image Processing Based Vehicle Detection And Tracking System Poonam A. Kandalkar 1, Gajanan P. Dhok 2 ME, Scholar, Electronics and Telecommunication Engineering, Sipna College of Engineering and Technology,
ME 6406 MACHINE VISION. Georgia Institute of Technology
 ME 6406 MACHINE VISION Georgia Institute of Technology Class Information Instructor Professor Kok-Meng Lee MARC 474 Office hours: Tues/Thurs 1:00-2:00 pm kokmeng.lee@me.gatech.edu (404)-894-7402 Class
ME 6406 MACHINE VISION Georgia Institute of Technology Class Information Instructor Professor Kok-Meng Lee MARC 474 Office hours: Tues/Thurs 1:00-2:00 pm kokmeng.lee@me.gatech.edu (404)-894-7402 Class
PELLISSIPPI STATE TECHNICAL COMMUNITY COLLEGE MASTER SYLLABUS. CIVIL ENGINEERING DRAWING W/LAB CID 2290 (formerly CID 2195)
") PELLISSIPPI STATE TECHNICAL COMMUNITY COLLEGE MASTER SYLLABUS CIVIL ENGINEERING DRAWING W/LAB CID 2290 (formerly CID 2195) Class Hours: 3.0 Credit Hours: 4.0 Laboratory Hours: 3.0 Revised: Fall 08 Catalog
PELLISSIPPI STATE TECHNICAL COMMUNITY COLLEGE MASTER SYLLABUS CIVIL ENGINEERING DRAWING W/LAB CID 2290 (formerly CID 2195) Class Hours: 3.0 Credit Hours: 4.0 Laboratory Hours: 3.0 Revised: Fall 08 Catalog
Curriculum Vitae. Abd El Khalick Mohammad, 17 Nov Doctor of Engineering H-index: 6 and Citation: 107 (Google Scholar) 1.
 1.") Curriculum Vitae Abd El Khalick Mohammad, 17 Nov. 1984 Doctor of Engineering H-index: 6 and Citation: 107 (Google Scholar) Previous position: Research Fellow Centre for E-City EXQUISITUS, Electrical and
Curriculum Vitae Abd El Khalick Mohammad, 17 Nov. 1984 Doctor of Engineering H-index: 6 and Citation: 107 (Google Scholar) Previous position: Research Fellow Centre for E-City EXQUISITUS, Electrical and
FSI Machine Vision Training Programs
 FSI Machine Vision Training Programs Table of Contents Introduction to Machine Vision (Course # MVC-101) Machine Vision and NeuroCheck overview (Seminar # MVC-102) Machine Vision, EyeVision and EyeSpector
FSI Machine Vision Training Programs Table of Contents Introduction to Machine Vision (Course # MVC-101) Machine Vision and NeuroCheck overview (Seminar # MVC-102) Machine Vision, EyeVision and EyeSpector
On the WEB. Digital Image Processing ECE 178. B. S. MANJUNATH RM 3157 ENGR I Tel:
 Digital Image Processing ECE 178 B. S. MANJUNATH RM 3157 ENGR I Tel:893-7112 manj@ece.ucsb.edu http://vision.ece.ucsb.edu Introduction 1 On the WEB For course information: http://www.ece.ucsb.edu/~manj/ece178
Digital Image Processing ECE 178 B. S. MANJUNATH RM 3157 ENGR I Tel:893-7112 manj@ece.ucsb.edu http://vision.ece.ucsb.edu Introduction 1 On the WEB For course information: http://www.ece.ucsb.edu/~manj/ece178
A Study on the control Method of 3-Dimensional Space Application using KINECT System Jong-wook Kang, Dong-jun Seo, and Dong-seok Jung,
 IJCSNS International Journal of Computer Science and Network Security, VOL.11 No.9, September 2011 55 A Study on the control Method of 3-Dimensional Space Application using KINECT System Jong-wook Kang,
IJCSNS International Journal of Computer Science and Network Security, VOL.11 No.9, September 2011 55 A Study on the control Method of 3-Dimensional Space Application using KINECT System Jong-wook Kang,
CSE Tue 10/09. Nadir Weibel
 CSE 118 - Tue 10/09 Nadir Weibel Today Admin Teams Assignments, grading, submissions Mini Quiz on Week 1 (readings and class material) Low-Fidelity Prototyping 1st Project Assignment Computer Vision, Kinect,
CSE 118 - Tue 10/09 Nadir Weibel Today Admin Teams Assignments, grading, submissions Mini Quiz on Week 1 (readings and class material) Low-Fidelity Prototyping 1st Project Assignment Computer Vision, Kinect,
(15-862): Computational Photography
: Computational Photography") 15-463 (15-862): Computational Photography 15-463 (15-862): Computational Photography Staff Prof: Alexei Efros (efros@cs), 4207 NSH TA: Santosh Kumar Divvala (santosh@cs), TBA Web Page http://graphics.cs.cmu.edu/courses/15-463/
15-463 (15-862): Computational Photography 15-463 (15-862): Computational Photography Staff Prof: Alexei Efros (efros@cs), 4207 NSH TA: Santosh Kumar Divvala (santosh@cs), TBA Web Page http://graphics.cs.cmu.edu/courses/15-463/
HUMAN COMPUTER INTERACTION 0. PREFACE. I-Chen Lin, National Chiao Tung University, Taiwan
 HUMAN COMPUTER INTERACTION 0. PREFACE I-Chen Lin, National Chiao Tung University, Taiwan About The Course Course title: Human Computer Interaction (HCI) Lectures: ED202, 13:20~15:10(Mon.), 9:00~9:50(Thur.)
HUMAN COMPUTER INTERACTION 0. PREFACE I-Chen Lin, National Chiao Tung University, Taiwan About The Course Course title: Human Computer Interaction (HCI) Lectures: ED202, 13:20~15:10(Mon.), 9:00~9:50(Thur.)
Image Analysis & Searching
 Image Analysis & Searching 1 Searching Photos Look for photos like this one: Look for beach photos Look for photos taken Sept. 15, 2000 Look for photos with: Look for photos with Aunt Thelma 2 Annotating
Image Analysis & Searching 1 Searching Photos Look for photos like this one: Look for beach photos Look for photos taken Sept. 15, 2000 Look for photos with: Look for photos with Aunt Thelma 2 Annotating
MN 345: AUTOMATED MANUFACTURING Spring 2008 (4 credits)
") Boston University, College of Engineering, Dept. of Manufacturing Engineering MN 345: AUTOMATED MANUFACTURING Spring 2008 (4 credits) Professor Christos G. Cassandras Room 128, 15 St. Mary's St. TEL: 353-7154,
Boston University, College of Engineering, Dept. of Manufacturing Engineering MN 345: AUTOMATED MANUFACTURING Spring 2008 (4 credits) Professor Christos G. Cassandras Room 128, 15 St. Mary's St. TEL: 353-7154,
Image Processing. Gabriel Brostow & Simon Prince. GV12/3072 Image Processing.
 Image Processing Gabriel Brostow & Simon Prince GV12/3072 Image Processing. 1 GV12/3072 Image Processing. 2 Motivation and Goals Grounding in image processing techniques Concentrate on algorithms used
Image Processing Gabriel Brostow & Simon Prince GV12/3072 Image Processing. 1 GV12/3072 Image Processing. 2 Motivation and Goals Grounding in image processing techniques Concentrate on algorithms used
Introduction. Ioannis Rekleitis
 Introduction Ioannis Rekleitis Why Image Processing? Who here has a camera? How many cameras do you have Point where computers fast/cheap Cameras become omnipresent Deep Learning CSCE 590: Introduction
Introduction Ioannis Rekleitis Why Image Processing? Who here has a camera? How many cameras do you have Point where computers fast/cheap Cameras become omnipresent Deep Learning CSCE 590: Introduction
COS Lecture 1 Autonomous Robot Navigation
 COS 495 - Lecture 1 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Introduction Education B.Sc.Eng Engineering Phyics, Queen s University
COS 495 - Lecture 1 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Introduction Education B.Sc.Eng Engineering Phyics, Queen s University
MRT: Mixed-Reality Tabletop
 MRT: Mixed-Reality Tabletop Students: Dan Bekins, Jonathan Deutsch, Matthew Garrett, Scott Yost PIs: Daniel Aliaga, Dongyan Xu August 2004 Goals Create a common locus for virtual interaction without having
MRT: Mixed-Reality Tabletop Students: Dan Bekins, Jonathan Deutsch, Matthew Garrett, Scott Yost PIs: Daniel Aliaga, Dongyan Xu August 2004 Goals Create a common locus for virtual interaction without having
Transportation Informatics Group, ALPEN-ADRIA University of Klagenfurt. Transportation Informatics Group University of Klagenfurt 3/10/2009 1
 Machine Vision Transportation Informatics Group University of Klagenfurt Alireza Fasih, 2009 3/10/2009 1 Address: L4.2.02, Lakeside Park, Haus B04, Ebene 2, Klagenfurt-Austria Index Driver Fatigue Detection
Machine Vision Transportation Informatics Group University of Klagenfurt Alireza Fasih, 2009 3/10/2009 1 Address: L4.2.02, Lakeside Park, Haus B04, Ebene 2, Klagenfurt-Austria Index Driver Fatigue Detection
Digital Image Processing. Lecture 1 (Introduction) Bu-Ali Sina University Computer Engineering Dep. Fall 2011
 Bu-Ali Sina University Computer Engineering Dep. Fall 2011") Digital Processing Lecture 1 (Introduction) Bu-Ali Sina University Computer Engineering Dep. Fall 2011 Introduction One picture is worth more than ten thousand p words Outline Syllabus References Course
Digital Processing Lecture 1 (Introduction) Bu-Ali Sina University Computer Engineering Dep. Fall 2011 Introduction One picture is worth more than ten thousand p words Outline Syllabus References Course
Introduction to Computer Vision
 Introduction to Computer Vision CS / ECE 181B Thursday, April 1, 2004 Course Details HW #0 and HW #1 are available. Course web site http://www.ece.ucsb.edu/~manj/cs181b Syllabus, schedule, lecture notes,
Introduction to Computer Vision CS / ECE 181B Thursday, April 1, 2004 Course Details HW #0 and HW #1 are available. Course web site http://www.ece.ucsb.edu/~manj/cs181b Syllabus, schedule, lecture notes,
WHO. 6 staff people. Tel: / Fax: Website: vision.unipv.it
 It has been active in the Department of Electrical, Computer and Biomedical Engineering of the University of Pavia since the early 70s. The group s initial research activities concentrated on image enhancement
It has been active in the Department of Electrical, Computer and Biomedical Engineering of the University of Pavia since the early 70s. The group s initial research activities concentrated on image enhancement
CSE 166: Image Processing. Overview. What is an image? Representing an image. What is image processing? History. Today
 CSE 166: Image Processing Overview Image Processing CSE 166 Today Course overview Logistics Some mathematics Lectures will be boardwork and slides CSE 166, Fall 2016 2 What is an image? Representing an
CSE 166: Image Processing Overview Image Processing CSE 166 Today Course overview Logistics Some mathematics Lectures will be boardwork and slides CSE 166, Fall 2016 2 What is an image? Representing an
UVic Department of Electrical and Computer Engineering
 UVic Department of Electrical and Computer Engineering COURSE OUTLINE ELEC 365 Applied Electronics and Electrical Machines Fall 2013 Instructor: Office Hours: Dr. S. Nandi Days: Same as tutorial time in
UVic Department of Electrical and Computer Engineering COURSE OUTLINE ELEC 365 Applied Electronics and Electrical Machines Fall 2013 Instructor: Office Hours: Dr. S. Nandi Days: Same as tutorial time in
(15-862): Computational Photography
: Computational Photography") 15-463 (15-862): Computational Photography 15-463 (15-862): Computational Photography Staff Prof: Alexei Efros (efros@cs), 225 Smith Hall TA: Natasha Kholgade (nkholgad@andrew.cmu.edu) Web Page http://graphics.cs.cmu.edu/courses/15-463/
15-463 (15-862): Computational Photography 15-463 (15-862): Computational Photography Staff Prof: Alexei Efros (efros@cs), 225 Smith Hall TA: Natasha Kholgade (nkholgad@andrew.cmu.edu) Web Page http://graphics.cs.cmu.edu/courses/15-463/
Assessment of Smart Machines and Manufacturing Competence Centre (SMACC) Scientific Advisory Board Site Visit April 2018.
 Scientific Advisory Board Site Visit April 2018.") Assessment of Smart Machines and Manufacturing Competence Centre (SMACC) Scientific Advisory Board Site Visit 25-27 April 2018 Assessment Report 1. Scientific ambition, quality and impact Rating: 3.5 The
Assessment of Smart Machines and Manufacturing Competence Centre (SMACC) Scientific Advisory Board Site Visit 25-27 April 2018 Assessment Report 1. Scientific ambition, quality and impact Rating: 3.5 The
COM 357: Scriptwriting for Serial Media Spring 2014 Tue./Thur. 12-1:50pm Bouillon 106
 COM 357: Scriptwriting for Serial Media Spring 2014 Tue./Thur. 12-1:50pm Bouillon 106 1 Instructor: Maria Sanders Office Hours: Bouillon 225 Assistant Professor, Film and Video Studies Mon. / Tue. / Wed.
COM 357: Scriptwriting for Serial Media Spring 2014 Tue./Thur. 12-1:50pm Bouillon 106 1 Instructor: Maria Sanders Office Hours: Bouillon 225 Assistant Professor, Film and Video Studies Mon. / Tue. / Wed.
ISCW 2001 Tutorial. An Introduction to Augmented Reality
 ISCW 2001 Tutorial An Introduction to Augmented Reality Mark Billinghurst Human Interface Technology Laboratory University of Washington, Seattle grof@hitl.washington.edu Dieter Schmalstieg Technical University
ISCW 2001 Tutorial An Introduction to Augmented Reality Mark Billinghurst Human Interface Technology Laboratory University of Washington, Seattle grof@hitl.washington.edu Dieter Schmalstieg Technical University
Parametric Design 1
 Western Technical College 10606115 Parametric Design 1 Course Outcome Summary Course Information Description Career Cluster Instructional Level Total Credits 3 This course is designed to introduce students
Western Technical College 10606115 Parametric Design 1 Course Outcome Summary Course Information Description Career Cluster Instructional Level Total Credits 3 This course is designed to introduce students
Gesture Recognition with Real World Environment using Kinect: A Review
 Gesture Recognition with Real World Environment using Kinect: A Review Prakash S. Sawai 1, Prof. V. K. Shandilya 2 P.G. Student, Department of Computer Science & Engineering, Sipna COET, Amravati, Maharashtra,
Gesture Recognition with Real World Environment using Kinect: A Review Prakash S. Sawai 1, Prof. V. K. Shandilya 2 P.G. Student, Department of Computer Science & Engineering, Sipna COET, Amravati, Maharashtra,
University of Technology. Control and Systems Eng. Dept. Curriculum Vitae (C.V.)
") University of Technology Control and Dept. Curriculum Vitae (C.V.) Last updated: 1/8/2017 Full name: Assist. Prof. Dr. LAITH JASIM SAUD Gender: Date of birth : Nationality : Place of work : Languages:
University of Technology Control and Dept. Curriculum Vitae (C.V.) Last updated: 1/8/2017 Full name: Assist. Prof. Dr. LAITH JASIM SAUD Gender: Date of birth : Nationality : Place of work : Languages:
DIGF 6B21 Ubiquitous Computing
 DIGF 6B21 Ubiquitous Computing NUMBER OF CREDITS: 1.5 Day and Time: Tuesdays 18:30 21:30, beginning October 30th Location: Room 7301, 205 Richmond Professor: Nick Puckett Email: npuckett@faculty.ocadu.ca
DIGF 6B21 Ubiquitous Computing NUMBER OF CREDITS: 1.5 Day and Time: Tuesdays 18:30 21:30, beginning October 30th Location: Room 7301, 205 Richmond Professor: Nick Puckett Email: npuckett@faculty.ocadu.ca
MECHANICAL DESIGN LEARNING ENVIRONMENTS BASED ON VIRTUAL REALITY TECHNOLOGIES
 INTERNATIONAL CONFERENCE ON ENGINEERING AND PRODUCT DESIGN EDUCATION 4 & 5 SEPTEMBER 2008, UNIVERSITAT POLITECNICA DE CATALUNYA, BARCELONA, SPAIN MECHANICAL DESIGN LEARNING ENVIRONMENTS BASED ON VIRTUAL
INTERNATIONAL CONFERENCE ON ENGINEERING AND PRODUCT DESIGN EDUCATION 4 & 5 SEPTEMBER 2008, UNIVERSITAT POLITECNICA DE CATALUNYA, BARCELONA, SPAIN MECHANICAL DESIGN LEARNING ENVIRONMENTS BASED ON VIRTUAL
CS594, Section 30682:
 CS594, Section 30682: Distributed Intelligence in Autonomous Robotics Spring 2003 Tuesday/Thursday 11:10 12:25 http://www.cs.utk.edu/~parker/courses/cs594-spring03 Instructor: Dr. Lynne E. Parker ½ TA:
CS594, Section 30682: Distributed Intelligence in Autonomous Robotics Spring 2003 Tuesday/Thursday 11:10 12:25 http://www.cs.utk.edu/~parker/courses/cs594-spring03 Instructor: Dr. Lynne E. Parker ½ TA:
The Intel Science and Technology Center for Pervasive Computing
 The Intel Science and Technology Center for Pervasive Computing Investing in New Levels of Academic Collaboration Rajiv Mathur, Program Director ISTC-PC Anthony LaMarca, Intel Principal Investigator Professor
The Intel Science and Technology Center for Pervasive Computing Investing in New Levels of Academic Collaboration Rajiv Mathur, Program Director ISTC-PC Anthony LaMarca, Intel Principal Investigator Professor
There will be a course blackboard which will be mirrored on website:
 48-175 Descriptive Geometry Spring Semester 9 units Lectures: UT (CMB 1030) 1.30:2.50 Recitations: TBD Instructor: Ramesh Krishnamurti CMB 1176 ramesh@cmu.edu There will be a course blackboard which will
48-175 Descriptive Geometry Spring Semester 9 units Lectures: UT (CMB 1030) 1.30:2.50 Recitations: TBD Instructor: Ramesh Krishnamurti CMB 1176 ramesh@cmu.edu There will be a course blackboard which will
GGS 412 Air Photography Interpretation
 GGS 412 Air Photography Interpretation 15019-001 Syllabus Instructor: Dr. Ron Resmini Course description and objective: GGS 412, Air Photography Interpretation, will provide students with the concepts,
GGS 412 Air Photography Interpretation 15019-001 Syllabus Instructor: Dr. Ron Resmini Course description and objective: GGS 412, Air Photography Interpretation, will provide students with the concepts,
The Department of Instrument Science and Engineering (ISE) Program Overview
 Program Overview") Program Overview The Department of Instrument Science and Engineering (ISE) The Department of Instrument Science and Engineering (ISE), formerly the Department of Precision Instruments and Machinery, was
Program Overview The Department of Instrument Science and Engineering (ISE) The Department of Instrument Science and Engineering (ISE), formerly the Department of Precision Instruments and Machinery, was
Insights into High-level Visual Perception
 Insights into High-level Visual Perception or Where You Look is What You Get Jeff B. Pelz Visual Perception Laboratory Carlson Center for Imaging Science Rochester Institute of Technology Students Roxanne
Insights into High-level Visual Perception or Where You Look is What You Get Jeff B. Pelz Visual Perception Laboratory Carlson Center for Imaging Science Rochester Institute of Technology Students Roxanne
Fundamentals of Computer Vision
 Fundamentals of Computer Vision COMP 558 Course notes for Prof. Siddiqi's class. taken by Ruslana Makovetsky (Winter 2012) What is computer vision?! Broadly speaking, it has to do with making a computer
Fundamentals of Computer Vision COMP 558 Course notes for Prof. Siddiqi's class. taken by Ruslana Makovetsky (Winter 2012) What is computer vision?! Broadly speaking, it has to do with making a computer
CMPT Winter Computational Photography. Instructor: Yasutaka Furukawa. Quint Buchholz
 CMPT 469-888 Winter 2018 Computational Photography Instructor: Yasutaka Furukawa Quint Buchholz Today Why Computational Photography? Logistics About me Camera Computational photography or computational
CMPT 469-888 Winter 2018 Computational Photography Instructor: Yasutaka Furukawa Quint Buchholz Today Why Computational Photography? Logistics About me Camera Computational photography or computational
Practical Image and Video Processing Using MATLAB
 Practical Image and Video Processing Using MATLAB Chapter 1 Introduction and overview What will we learn? What is image processing? What are the main applications of image processing? What is an image?
Practical Image and Video Processing Using MATLAB Chapter 1 Introduction and overview What will we learn? What is image processing? What are the main applications of image processing? What is an image?
Digital images. Digital Image Processing Fundamentals. Digital images. Varieties of digital images. Dr. Edmund Lam. ELEC4245: Digital Image Processing
 Digital images Digital Image Processing Fundamentals Dr Edmund Lam Department of Electrical and Electronic Engineering The University of Hong Kong (a) Natural image (b) Document image ELEC4245: Digital
Digital images Digital Image Processing Fundamentals Dr Edmund Lam Department of Electrical and Electronic Engineering The University of Hong Kong (a) Natural image (b) Document image ELEC4245: Digital
3D Interaction using Hand Motion Tracking. Srinath Sridhar Antti Oulasvirta
 3D Interaction using Hand Motion Tracking Srinath Sridhar Antti Oulasvirta EIT ICT Labs Smart Spaces Summer School 05-June-2013 Speaker Srinath Sridhar PhD Student Supervised by Prof. Dr. Christian Theobalt
3D Interaction using Hand Motion Tracking Srinath Sridhar Antti Oulasvirta EIT ICT Labs Smart Spaces Summer School 05-June-2013 Speaker Srinath Sridhar PhD Student Supervised by Prof. Dr. Christian Theobalt
Control of Manufacturing Processes. Spring 2004 Lecture #1 Introduction
 Control of Manufacturing Processes Subject Subject 2.830 2.830 6303 Spring 2004 Lecture #1 Introduction February 3, 2004 Background Pre-requisites requisites Your Background and Interests Relevant Experience
Control of Manufacturing Processes Subject Subject 2.830 2.830 6303 Spring 2004 Lecture #1 Introduction February 3, 2004 Background Pre-requisites requisites Your Background and Interests Relevant Experience