CS6670: Computer Vision
|
|
|
- Cuthbert McBride
- 6 years ago
- Views:
Transcription

1 CS6670: Computer Vision Noah Snavely Lecture 5: Cameras and Projection
2 Szeliski Reading
3 Announcements Project 1 assigned, see projects page: Quiz 1 on Wednesday
4 Image formation Let s design a camera Idea 1: put a piece of film in front of an object Do we get a reasonable image?
5 Pinhole camera Add a barrier to block off most of the rays This reduces blurring The opening known as the aperture How does this transform the image?
 Drawing aid for artists: described by Leonardo da Vinci (1452-1519) Source: A.")
6 Camera Obscura Gemma Frisius, 1558 Basic principle known to Mozi ( BC), Aristotle ( BC) Drawing aid for artists: described by Leonardo da Vinci ( ) Source: A. Efros
7 Camera Obscura


8 Home-made pinhole camera Why so blurry? Slide by A. Efros

9 Pinhole photography Justin Quinnell, The Clifton Suspension Bridge. December 17th June 21st month exposure
10 Shrinking the aperture Why not make the aperture as small as possible? Less light gets through Diffraction effects...
11 Shrinking the aperture
12 Adding a lens circle of confusion A lens focuses light onto the film There is a specific distance at which objects are in focus other points project to a circle of confusion in the image Changing the shape of the lens changes this distance
13 Lenses F focal point A lens focuses parallel rays onto a single focal point focal point at a distance f beyond the plane of the lens (the focal length) f is a function of the shape and index of refraction of the lens Aperture restricts the range of rays aperture may be on either side of the lens Lenses are typically spherical (easier to produce)
14 Thin lenses Thin lens equation: Any object point satisfying this equation is in focus What is the shape of the focus region? How can we change the focus region? Thin lens applet: (by Fu-Kwun Hwang )


15 Depth of Field f / 5.6 f / 32 Changing the aperture size affects depth of field A smaller aperture increases the range in which the object is approximately in focus Flower images from Wikipedia

16 Depth of Field
17 The eye The human eye is a camera Iris - colored annulus with radial muscles Pupil - the hole (aperture) whose size is controlled by the iris What s the film? photoreceptor cells (rods and cones) in the retina

18 Before Film Lens Based Camera Obscura, 1568 Srinivasa Narasimhan s slide

19 Film camera Still Life, Louis Jaques Mande Daguerre, 1837 Srinivasa Narasimhan s slide



20 Silicon Image Detector Silicon Image Detector, 1970 Shree Nayar s slide


21 Digital camera A digital camera replaces film with a sensor array Each cell in the array is a Charge Coupled Device light-sensitive diode that converts photons to electrons other variants exist: CMOS is becoming more popular





22 Color So far, we ve talked about grayscale images What about color? Most digital images are comprised of three color channels red, green, and, blue which combine to create most of the colors we can see = Why are there three?
23 Color perception L response curve Three types of cones Each is sensitive in a different region of the spectrum but regions overlap Short (S) corresponds to blue Medium (M) corresponds to green Long (L) corresponds to red Different sensitivities: we are more sensitive to green than red varies from person to person (and with age) Colorblindness deficiency in at least one type of cone

24 Field sequential YungYu Chuang s slide
25 Field sequential YungYu Chuang s slide

26 Field sequential YungYu Chuang s slide
 Lantern projector")

27 Prokudin-Gorskii (early 1900 s) Lantern projector YungYu Chuang s slide
 YungYu Chuang s")
28 Prokudin-Gorskii (early 1990 s) YungYu Chuang s slide

 CCD(G)")
29 Color sensing in camera: Prism Requires three chips and precise alignment More expensive CCD(R) CCD(G) CCD(B)

 Why")

30 Color filter array Bayer grid Estimate missing components from neighboring values (demosaicing) Why more green? Human Luminance Sensitivity Function Source: Steve Seitz

31 Bayer s pattern YungYu Chuang s slide



32 Color filter array red green blue output YungYu Chuang s slide
33 Color images We ll treat color images as a vector-valued function: r( x, y) f ( x, y) g( x, y) b ( x, y) We ll often convert to grayscale (e.g., 0.3 * r * g * b)



34 Dynamic range What is the range of light intensity that a camera can capture? Called dynamic range Digital cameras have difficulty capturing both high intensities and low intensities in the same image
35 Light response is nonlinear Our visual system has a large dynamic range We can resolve both light and dark things at the same time One mechanism for achieving this is that we sense light intensity on a logarithmic scale an exponential intensity ramp will be seen as a linear ramp Another mechanism is adaptation rods and cones adapt to be more sensitive in low light, less sensitive in bright light.
36 Visual dynamic range
37 Dynamic range Our total dynamic range is high (~10 9 ) Our dynamic range at a given time is still pretty high (~10 4 ) A camera s dynamic range for a given exposure is relatively low (2 8 = 256 tonal values, range of about ~10 3 )



38 High dynamic range imaging
, Johann Zahn (1631-1707) First photo: Joseph Nicephore Niepce (1822) Daguerréotypes (1839) Photographic")
 First fully digital camera: Kodak DCS100 (1990) Alhacen s notes Niepce, La Table Servie, 1822")
39 Historical context Pinhole model: Mozi ( BC), Aristotle ( BC) Principles of optics (including lenses): Alhacen ( ) Camera obscura: Leonardo da Vinci ( ), Johann Zahn ( ) First photo: Joseph Nicephore Niepce (1822) Daguerréotypes (1839) Photographic film (Eastman, 1889) Cinema (Lumière Brothers, 1895) Color Photography (Lumière Brothers, 1908) Television (Baird, Farnsworth, Zworykin, 1920s) First consumer camera with CCD: Sony Mavica (1981) First fully digital camera: Kodak DCS100 (1990) Alhacen s notes Niepce, La Table Servie, 1822 CCD chip
40 3-minute break Questions?
41 Projection

42 Projection

43 Müller-Lyer Illusion
44 Modeling projection The coordinate system We will use the pinhole model as an approximation Put the optical center (Center Of Projection) at the origin Put the image plane (Projection Plane) in front of the COP Why? The camera looks down the negative z axis we need this if we want right-handed-coordinates
45 Modeling projection Projection equations Compute intersection with PP of ray from (x,y,z) to COP Derived using similar triangles (on board) We get the projection by throwing out the last coordinate:
46 Modeling projection Is this a linear transformation? no division by z is nonlinear Homogeneous coordinates to the rescue! homogeneous image coordinates homogeneous scene coordinates Converting from homogeneous coordinates
47 Perspective Projection Projection is a matrix multiply using homogeneous coordinates: This is known as perspective projection The matrix is the projection matrix divide by third coordinate (Can also represent as a 4x4 matrix OpenGL does something like this)
48 Perspective Projection How does scaling the projection matrix change the transformation?
49 Orthographic projection Special case of perspective projection Distance from the COP to the PP is infinite Image World Good approximation for telephoto optics Also called parallel projection : (x, y, z) (x, y) What s the projection matrix?



50 Orthographic projection



51 Perspective projection

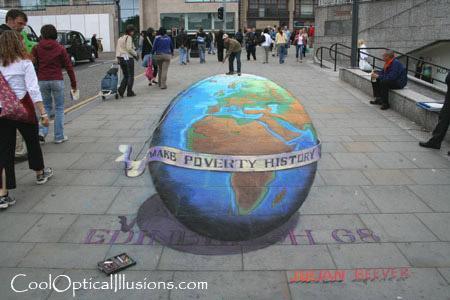
52 Perspective distortion What does a sphere project to? Image source: F. Durand


53 Perspective distortion The exterior columns appear bigger The distortion is not due to lens flaws Problem pointed out by Da Vinci Slide by F. Durand

54 Perspective distortion: People
55 Distortion No distortion Pin cushion Barrel Radial distortion of the image Caused by imperfect lenses Deviations are most noticeable for rays that pass through the edge of the lens


56 Correcting radial distortion from Helmut Dersch
57 Distortion
58 Modeling distortion Project to normalized image coordinates Apply radial distortion Apply focal length translate image center To model lens distortion Use above projection operation instead of standard projection matrix multiplication
59 Other types of projection Lots of intriguing variants (I ll just mention a few fun ones)
 Or buy one a lens from a variety of omnicam manufacturers See http://www.cis.upenn.")
60 360 degree field of view Basic approach Take a photo of a parabolic mirror with an orthographic lens (Nayar) Or buy one a lens from a variety of omnicam manufacturers See

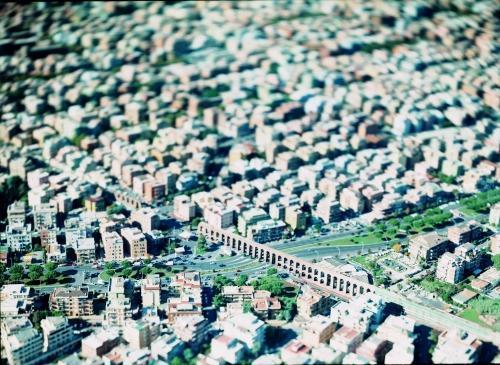

61 Tilt-shift Titlt-shift images from Olivo Barbieri and Photoshop imitations
 Slide by A. Efros Figures Stephen E.")
62 Dimensionality Reduction Machine (3D to 2D) 3D world 2D image Point of observation What have we lost? Angles Distances (lengths) Slide by A. Efros Figures Stephen E. Palmer, 2002
63 Projection properties Many-to-one: any points along same ray map to same point in image Points points Lines lines (collinearity is preserved) But line through focal point projects to a point Planes planes (or half-planes) But plane through focal point projects to line

64 Projection properties Parallel lines converge at a vanishing point Each direction in space has its own vanishing point But parallels parallel to the image plane remain parallel


65 Camera parameters How can we model the geometry of a camera? v y w COP Camera u Two important coordinate systems: 1. World coordinate system 2. Camera coordinate system z o The World x
66 Camera parameters To project a point (x,y,z) in world coordinates into a camera First transform (x,y,z) into camera coordinates Need to know Camera position (in world coordinates) Camera orientation (in world coordinates) The project into the image plane Need to know camera intrinsics
67 Projection equation The projection matrix models the cumulative effect of all parameters Useful to decompose into a series of operations x ΠX 1 * * * * * * * * * * * * Z Y X s sy sx ' 0 ' x x x x x x c y c x y fs x fs T I R Π projection intrinsics rotation translation identity matrix Camera parameters A camera is described by several parameters Translation T of the optical center from the origin of world coords Rotation R of the image plane focal length f, principle point (x c, y c ), pixel size (s x, s y ) blue parameters are called extrinsics, red are intrinsics The definitions of these parameters are not completely standardized especially intrinsics varies from one book to another
68 Extrinsics How do we get the camera to canonical form? (Center of projection at the origin, x-axis points right, y-axis points up, z-axis points backwards) Step 1: Translate by -c 0
69 Extrinsics How do we get the camera to canonical form? (Center of projection at the origin, x-axis points right, y-axis points up, z-axis points backwards) Step 1: Translate by -c How do we represent translation as a matrix multiplication? 0
70 Extrinsics How do we get the camera to canonical form? (Center of projection at the origin, x-axis points right, y-axis points up, z-axis points backwards) Step 1: Translate by -c Step 2: Rotate by R 0 3x3 rotation matrix
71 Extrinsics How do we get the camera to canonical form? (Center of projection at the origin, x-axis points right, y-axis points up, z-axis points backwards) Step 1: Translate by -c Step 2: Rotate by R 0
72 Perspective projection (intrinsics) (converts from 3D rays in camera coordinate system to pixel coordinates) in general, (upper triangular matrix) : aspect ratio (1 unless pixels are not square) : skew (0 unless pixels are shaped like rhombi/parallelograms) : principal point ((0,0) unless optical axis doesn t intersect projection plane at origin)







73 Focal length Can think of as zoom 24mm 50mm 200mm Also related to field of view 800mm


74 Projection matrix intrinsics projection rotation translation (t in book s notation)
75 Projection matrix = 0 (in homogeneous image coordinates)
76 Questions?
CS6670: Computer Vision
 CS6670: Computer Vision Noah Snavely Lecture 4a: Cameras Source: S. Lazebnik Reading Szeliski chapter 2.2.3, 2.3 Image formation Let s design a camera Idea 1: put a piece of film in front of an object
CS6670: Computer Vision Noah Snavely Lecture 4a: Cameras Source: S. Lazebnik Reading Szeliski chapter 2.2.3, 2.3 Image formation Let s design a camera Idea 1: put a piece of film in front of an object
Projection. Projection. Image formation. Müller-Lyer Illusion. Readings. Readings. Let s design a camera. Szeliski 2.1. Szeliski 2.
 Projection Projection Readings Szeliski 2.1 Readings Szeliski 2.1 Müller-Lyer Illusion Image formation object film by Pravin Bhat http://www.michaelbach.de/ot/sze_muelue/index.html Let s design a camera
Projection Projection Readings Szeliski 2.1 Readings Szeliski 2.1 Müller-Lyer Illusion Image formation object film by Pravin Bhat http://www.michaelbach.de/ot/sze_muelue/index.html Let s design a camera
Projection. Readings. Szeliski 2.1. Wednesday, October 23, 13
 Projection Readings Szeliski 2.1 Projection Readings Szeliski 2.1 Müller-Lyer Illusion by Pravin Bhat Müller-Lyer Illusion by Pravin Bhat http://www.michaelbach.de/ot/sze_muelue/index.html Müller-Lyer
Projection Readings Szeliski 2.1 Projection Readings Szeliski 2.1 Müller-Lyer Illusion by Pravin Bhat Müller-Lyer Illusion by Pravin Bhat http://www.michaelbach.de/ot/sze_muelue/index.html Müller-Lyer
Projection. Announcements. Müller-Lyer Illusion. Image formation. Readings Nalwa 2.1
 Announcements Mailing list (you should have received messages) Project 1 additional test sequences online Projection Readings Nalwa 2.1 Müller-Lyer Illusion Image formation object film by Pravin Bhat http://www.michaelbach.de/ot/sze_muelue/index.html
Announcements Mailing list (you should have received messages) Project 1 additional test sequences online Projection Readings Nalwa 2.1 Müller-Lyer Illusion Image formation object film by Pravin Bhat http://www.michaelbach.de/ot/sze_muelue/index.html
Cameras. CSE 455, Winter 2010 January 25, 2010
 Cameras CSE 455, Winter 2010 January 25, 2010 Announcements New Lecturer! Neel Joshi, Ph.D. Post-Doctoral Researcher Microsoft Research neel@cs Project 1b (seam carving) was due on Friday the 22 nd Project
Cameras CSE 455, Winter 2010 January 25, 2010 Announcements New Lecturer! Neel Joshi, Ph.D. Post-Doctoral Researcher Microsoft Research neel@cs Project 1b (seam carving) was due on Friday the 22 nd Project
Building a Real Camera. Slides Credit: Svetlana Lazebnik
 Building a Real Camera Slides Credit: Svetlana Lazebnik Home-made pinhole camera Slide by A. Efros http://www.debevec.org/pinhole/ Shrinking the aperture Why not make the aperture as small as possible?
Building a Real Camera Slides Credit: Svetlana Lazebnik Home-made pinhole camera Slide by A. Efros http://www.debevec.org/pinhole/ Shrinking the aperture Why not make the aperture as small as possible?
Building a Real Camera
 Building a Real Camera Home-made pinhole camera Slide by A. Efros http://www.debevec.org/pinhole/ Shrinking the aperture Why not make the aperture as small as possible? Less light gets through Diffraction
Building a Real Camera Home-made pinhole camera Slide by A. Efros http://www.debevec.org/pinhole/ Shrinking the aperture Why not make the aperture as small as possible? Less light gets through Diffraction
Unit 1: Image Formation
 Unit 1: Image Formation 1. Geometry 2. Optics 3. Photometry 4. Sensor Readings Szeliski 2.1-2.3 & 6.3.5 1 Physical parameters of image formation Geometric Type of projection Camera pose Optical Sensor
Unit 1: Image Formation 1. Geometry 2. Optics 3. Photometry 4. Sensor Readings Szeliski 2.1-2.3 & 6.3.5 1 Physical parameters of image formation Geometric Type of projection Camera pose Optical Sensor
The Camera : Computational Photography Alexei Efros, CMU, Fall 2008
 The Camera 15-463: Computational Photography Alexei Efros, CMU, Fall 2008 How do we see the world? object film Let s design a camera Idea 1: put a piece of film in front of an object Do we get a reasonable
The Camera 15-463: Computational Photography Alexei Efros, CMU, Fall 2008 How do we see the world? object film Let s design a camera Idea 1: put a piece of film in front of an object Do we get a reasonable
Two strategies for realistic rendering capture real world data synthesize from bottom up
 Recap from Wednesday Two strategies for realistic rendering capture real world data synthesize from bottom up Both have existed for 500 years. Both are successful. Attempts to take the best of both world
Recap from Wednesday Two strategies for realistic rendering capture real world data synthesize from bottom up Both have existed for 500 years. Both are successful. Attempts to take the best of both world
The Camera : Computational Photography Alexei Efros, CMU, Fall 2005
 The Camera 15-463: Computational Photography Alexei Efros, CMU, Fall 2005 How do we see the world? object film Let s design a camera Idea 1: put a piece of film in front of an object Do we get a reasonable
The Camera 15-463: Computational Photography Alexei Efros, CMU, Fall 2005 How do we see the world? object film Let s design a camera Idea 1: put a piece of film in front of an object Do we get a reasonable
Announcement A total of 5 (five) late days are allowed for projects. Office hours
 late days are allowed for projects. Office hours") Announcement A total of 5 (five) late days are allowed for projects. Office hours Me: 3:50-4:50pm Thursday (or by appointment) Jake: 12:30-1:30PM Monday and Wednesday Image Formation Digital Camera Film
Announcement A total of 5 (five) late days are allowed for projects. Office hours Me: 3:50-4:50pm Thursday (or by appointment) Jake: 12:30-1:30PM Monday and Wednesday Image Formation Digital Camera Film
Image Formation III Chapter 1 (Forsyth&Ponce) Cameras Lenses & Sensors
 Cameras Lenses & Sensors") Image Formation III Chapter 1 (Forsyth&Ponce) Cameras Lenses & Sensors Guido Gerig CS-GY 6643, Spring 2017 (slides modified from Marc Pollefeys, UNC Chapel Hill/ ETH Zurich, With content from Prof. Trevor
Image Formation III Chapter 1 (Forsyth&Ponce) Cameras Lenses & Sensors Guido Gerig CS-GY 6643, Spring 2017 (slides modified from Marc Pollefeys, UNC Chapel Hill/ ETH Zurich, With content from Prof. Trevor
Lecture 02 Image Formation 1
 Institute of Informatics Institute of Neuroinformatics Lecture 02 Image Formation 1 Davide Scaramuzza http://rpg.ifi.uzh.ch 1 Lab Exercise 1 - Today afternoon Room ETH HG E 1.1 from 13:15 to 15:00 Work
Institute of Informatics Institute of Neuroinformatics Lecture 02 Image Formation 1 Davide Scaramuzza http://rpg.ifi.uzh.ch 1 Lab Exercise 1 - Today afternoon Room ETH HG E 1.1 from 13:15 to 15:00 Work
How do we see the world?
 The Camera 1 How do we see the world? Let s design a camera Idea 1: put a piece of film in front of an object Do we get a reasonable image? Credit: Steve Seitz 2 Pinhole camera Idea 2: Add a barrier to
The Camera 1 How do we see the world? Let s design a camera Idea 1: put a piece of film in front of an object Do we get a reasonable image? Credit: Steve Seitz 2 Pinhole camera Idea 2: Add a barrier to
Overview. Pinhole camera model Projective geometry Vanishing points and lines Projection matrix Cameras with Lenses Color Digital image
 Camera & Color Overview Pinhole camera model Projective geometry Vanishing points and lines Projection matrix Cameras with Lenses Color Digital image Book: Hartley 6.1, Szeliski 2.1.5, 2.2, 2.3 The trip
Camera & Color Overview Pinhole camera model Projective geometry Vanishing points and lines Projection matrix Cameras with Lenses Color Digital image Book: Hartley 6.1, Szeliski 2.1.5, 2.2, 2.3 The trip
CS559: Computer Graphics. Lecture 2: Image Formation in Eyes and Cameras Li Zhang Spring 2008
 CS559: Computer Graphics Lecture 2: Image Formation in Eyes and Cameras Li Zhang Spring 2008 Today Eyes Cameras Light Why can we see? Visible Light and Beyond Infrared, e.g. radio wave longer wavelength
CS559: Computer Graphics Lecture 2: Image Formation in Eyes and Cameras Li Zhang Spring 2008 Today Eyes Cameras Light Why can we see? Visible Light and Beyond Infrared, e.g. radio wave longer wavelength
Cameras. Outline. Pinhole camera. Camera trial #1. Pinhole camera Film camera Digital camera Video camera
 Outline Cameras Pinhole camera Film camera Digital camera Video camera Digital Visual Effects, Spring 2007 Yung-Yu Chuang 2007/3/6 with slides by Fredo Durand, Brian Curless, Steve Seitz and Alexei Efros
Outline Cameras Pinhole camera Film camera Digital camera Video camera Digital Visual Effects, Spring 2007 Yung-Yu Chuang 2007/3/6 with slides by Fredo Durand, Brian Curless, Steve Seitz and Alexei Efros
LENSES. INEL 6088 Computer Vision
 LENSES INEL 6088 Computer Vision Digital camera A digital camera replaces film with a sensor array Each cell in the array is a Charge Coupled Device light-sensitive diode that converts photons to electrons
LENSES INEL 6088 Computer Vision Digital camera A digital camera replaces film with a sensor array Each cell in the array is a Charge Coupled Device light-sensitive diode that converts photons to electrons
Lecture 7: Camera Models
 Lecture 7: Camera Models Professor Stanford Vision Lab 1 What we will learn toda? Pinhole cameras Cameras & lenses The geometr of pinhole cameras Reading: [FP]Chapters 1 3 [HZ] Chapter 6 2 What we will
Lecture 7: Camera Models Professor Stanford Vision Lab 1 What we will learn toda? Pinhole cameras Cameras & lenses The geometr of pinhole cameras Reading: [FP]Chapters 1 3 [HZ] Chapter 6 2 What we will
CSE 473/573 Computer Vision and Image Processing (CVIP)
") CSE 473/573 Computer Vision and Image Processing (CVIP) Ifeoma Nwogu inwogu@buffalo.edu Lecture 4 Image formation(part I) Schedule Last class linear algebra overview Today Image formation and camera properties
CSE 473/573 Computer Vision and Image Processing (CVIP) Ifeoma Nwogu inwogu@buffalo.edu Lecture 4 Image formation(part I) Schedule Last class linear algebra overview Today Image formation and camera properties
Image formation - Cameras. Grading & Project. About the course. Tentative Schedule. Course Content. Students introduction
 About the course Instructors: Haibin Ling (hbling@temple, Wachman 35) Hours Lecture: Tuesda 5:3-8:pm, TTLMAN 43B Office hour: Tuesda 3: - 5:pm, or b appointment Textbook Computer Vision: Models, Learning,
About the course Instructors: Haibin Ling (hbling@temple, Wachman 35) Hours Lecture: Tuesda 5:3-8:pm, TTLMAN 43B Office hour: Tuesda 3: - 5:pm, or b appointment Textbook Computer Vision: Models, Learning,
Lecture 2 Camera Models
 Lecture 2 Camera Models Professor Silvio Savarese Computational Vision and Geometr Lab Silvio Savarese Lecture 2-4-Jan-4 Announcements Prerequisites: an questions? This course requires knowledge of linear
Lecture 2 Camera Models Professor Silvio Savarese Computational Vision and Geometr Lab Silvio Savarese Lecture 2-4-Jan-4 Announcements Prerequisites: an questions? This course requires knowledge of linear
Cameras. Digital Visual Effects, Spring 2008 Yung-Yu Chuang 2008/2/26. with slides by Fredo Durand, Brian Curless, Steve Seitz and Alexei Efros
 Cameras Digital Visual Effects, Spring 2008 Yung-Yu Chuang 2008/2/26 with slides by Fredo Durand, Brian Curless, Steve Seitz and Alexei Efros Camera trial #1 scene film Put a piece of film in front of
Cameras Digital Visual Effects, Spring 2008 Yung-Yu Chuang 2008/2/26 with slides by Fredo Durand, Brian Curless, Steve Seitz and Alexei Efros Camera trial #1 scene film Put a piece of film in front of
Computer Vision. The Pinhole Camera Model
 Computer Vision The Pinhole Camera Model Filippo Bergamasco (filippo.bergamasco@unive.it) http://www.dais.unive.it/~bergamasco DAIS, Ca Foscari University of Venice Academic year 2017/2018 Imaging device
Computer Vision The Pinhole Camera Model Filippo Bergamasco (filippo.bergamasco@unive.it) http://www.dais.unive.it/~bergamasco DAIS, Ca Foscari University of Venice Academic year 2017/2018 Imaging device
Image Formation. Dr. Gerhard Roth. COMP 4102A Winter 2015 Version 3
 Image Formation Dr. Gerhard Roth COMP 4102A Winter 2015 Version 3 1 Image Formation Two type of images Intensity image encodes light intensities (passive sensor) Range (depth) image encodes shape and distance
Image Formation Dr. Gerhard Roth COMP 4102A Winter 2015 Version 3 1 Image Formation Two type of images Intensity image encodes light intensities (passive sensor) Range (depth) image encodes shape and distance
Cameras. Shrinking the aperture. Camera trial #1. Pinhole camera. Digital Visual Effects Yung-Yu Chuang. Put a piece of film in front of an object.
 Camera trial #1 Cameras Digital Visual Effects Yung-Yu Chuang scene film with slides by Fredo Durand, Brian Curless, Steve Seitz and Alexei Efros Put a piece of film in front of an object. Pinhole camera
Camera trial #1 Cameras Digital Visual Effects Yung-Yu Chuang scene film with slides by Fredo Durand, Brian Curless, Steve Seitz and Alexei Efros Put a piece of film in front of an object. Pinhole camera
VC 14/15 TP2 Image Formation
 VC 14/15 TP2 Image Formation Mestrado em Ciência de Computadores Mestrado Integrado em Engenharia de Redes e Sistemas Informáticos Miguel Tavares Coimbra Outline Computer Vision? The Human Visual System
VC 14/15 TP2 Image Formation Mestrado em Ciência de Computadores Mestrado Integrado em Engenharia de Redes e Sistemas Informáticos Miguel Tavares Coimbra Outline Computer Vision? The Human Visual System
Lecture 2 Camera Models
 Lecture 2 Camera Models Professor Silvio Savarese Computational Vision and Geometr Lab Silvio Savarese Lecture 2 - -Jan-8 Lecture 2 Camera Models Pinhole cameras Cameras lenses The geometr of pinhole cameras
Lecture 2 Camera Models Professor Silvio Savarese Computational Vision and Geometr Lab Silvio Savarese Lecture 2 - -Jan-8 Lecture 2 Camera Models Pinhole cameras Cameras lenses The geometr of pinhole cameras
VC 11/12 T2 Image Formation
 VC 11/12 T2 Image Formation Mestrado em Ciência de Computadores Mestrado Integrado em Engenharia de Redes e Sistemas Informáticos Miguel Tavares Coimbra Outline Computer Vision? The Human Visual System
VC 11/12 T2 Image Formation Mestrado em Ciência de Computadores Mestrado Integrado em Engenharia de Redes e Sistemas Informáticos Miguel Tavares Coimbra Outline Computer Vision? The Human Visual System
CSE 527: Introduction to Computer Vision
 CSE 527: Introduction to Computer Vision Week 2 - Class 2: Vision, Physics, Cameras September 7th, 2017 Today Physics Human Vision Eye Brain Perspective Projection Camera Models Image Formation Digital
CSE 527: Introduction to Computer Vision Week 2 - Class 2: Vision, Physics, Cameras September 7th, 2017 Today Physics Human Vision Eye Brain Perspective Projection Camera Models Image Formation Digital
Image Formation: Camera Model
 Image Formation: Camera Model Ruigang Yang COMP 684 Fall 2005, CS684-IBMR Outline Camera Models Pinhole Perspective Projection Affine Projection Camera with Lenses Digital Image Formation The Human Eye
Image Formation: Camera Model Ruigang Yang COMP 684 Fall 2005, CS684-IBMR Outline Camera Models Pinhole Perspective Projection Affine Projection Camera with Lenses Digital Image Formation The Human Eye
VC 16/17 TP2 Image Formation
 VC 16/17 TP2 Image Formation Mestrado em Ciência de Computadores Mestrado Integrado em Engenharia de Redes e Sistemas Informáticos Hélder Filipe Pinto de Oliveira Outline Computer Vision? The Human Visual
VC 16/17 TP2 Image Formation Mestrado em Ciência de Computadores Mestrado Integrado em Engenharia de Redes e Sistemas Informáticos Hélder Filipe Pinto de Oliveira Outline Computer Vision? The Human Visual
To Do. Advanced Computer Graphics. Outline. Computational Imaging. How do we see the world? Pinhole camera
 Advanced Computer Graphics CSE 163 [Spring 2017], Lecture 14 Ravi Ramamoorthi http://www.cs.ucsd.edu/~ravir To Do Assignment 2 due May 19 Any last minute issues or questions? Next two lectures: Imaging,
Advanced Computer Graphics CSE 163 [Spring 2017], Lecture 14 Ravi Ramamoorthi http://www.cs.ucsd.edu/~ravir To Do Assignment 2 due May 19 Any last minute issues or questions? Next two lectures: Imaging,
CS 443: Imaging and Multimedia Cameras and Lenses
 CS 443: Imaging and Multimedia Cameras and Lenses Spring 2008 Ahmed Elgammal Dept of Computer Science Rutgers University Outlines Cameras and lenses! 1 They are formed by the projection of 3D objects.
CS 443: Imaging and Multimedia Cameras and Lenses Spring 2008 Ahmed Elgammal Dept of Computer Science Rutgers University Outlines Cameras and lenses! 1 They are formed by the projection of 3D objects.
Image Formation and Capture
 Figure credits: B. Curless, E. Hecht, W.J. Smith, B.K.P. Horn, A. Theuwissen, and J. Malik Image Formation and Capture COS 429: Computer Vision Image Formation and Capture Real world Optics Sensor Devices
Figure credits: B. Curless, E. Hecht, W.J. Smith, B.K.P. Horn, A. Theuwissen, and J. Malik Image Formation and Capture COS 429: Computer Vision Image Formation and Capture Real world Optics Sensor Devices
Cameras. Outline. Pinhole camera. Camera trial #1. Pinhole camera Film camera Digital camera Video camera High dynamic range imaging
 Outline Cameras Pinhole camera Film camera Digital camera Video camera High dynamic range imaging Digital Visual Effects, Spring 2006 Yung-Yu Chuang 2006/3/1 with slides by Fedro Durand, Brian Curless,
Outline Cameras Pinhole camera Film camera Digital camera Video camera High dynamic range imaging Digital Visual Effects, Spring 2006 Yung-Yu Chuang 2006/3/1 with slides by Fedro Durand, Brian Curless,
IMAGE FORMATION. Light source properties. Sensor characteristics Surface. Surface reflectance properties. Optics
 IMAGE FORMATION Light source properties Sensor characteristics Surface Exposure shape Optics Surface reflectance properties ANALOG IMAGES An image can be understood as a 2D light intensity function f(x,y)
IMAGE FORMATION Light source properties Sensor characteristics Surface Exposure shape Optics Surface reflectance properties ANALOG IMAGES An image can be understood as a 2D light intensity function f(x,y)
Colorado School of Mines. Computer Vision. Professor William Hoff Dept of Electrical Engineering &Computer Science.
 Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Sensors and Image Formation Imaging sensors and models of image formation Coordinate systems Digital
Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Sensors and Image Formation Imaging sensors and models of image formation Coordinate systems Digital
Lecture 7: Camera Models
 Lecture 7: Camera Models Professor Fei- Fei Li Stanford Vision Lab Lecture 7 -! 1 What we will learn toda? Pinhole cameras Cameras & lenses The geometr of pinhole cameras Reading: [FP] Chapters 1 3 [HZ]
Lecture 7: Camera Models Professor Fei- Fei Li Stanford Vision Lab Lecture 7 -! 1 What we will learn toda? Pinhole cameras Cameras & lenses The geometr of pinhole cameras Reading: [FP] Chapters 1 3 [HZ]
Cameras, lenses and sensors
 Cameras, lenses and sensors Marc Pollefeys COMP 256 Cameras, lenses and sensors Camera Models Pinhole Perspective Projection Affine Projection Camera with Lenses Sensing The Human Eye Reading: Chapter.
Cameras, lenses and sensors Marc Pollefeys COMP 256 Cameras, lenses and sensors Camera Models Pinhole Perspective Projection Affine Projection Camera with Lenses Sensing The Human Eye Reading: Chapter.
Image Formation. Dr. Gerhard Roth. COMP 4102A Winter 2014 Version 1
 Image Formation Dr. Gerhard Roth COMP 4102A Winter 2014 Version 1 Image Formation Two type of images Intensity image encodes light intensities (passive sensor) Range (depth) image encodes shape and distance
Image Formation Dr. Gerhard Roth COMP 4102A Winter 2014 Version 1 Image Formation Two type of images Intensity image encodes light intensities (passive sensor) Range (depth) image encodes shape and distance
CPSC 425: Computer Vision
 1 / 55 CPSC 425: Computer Vision Instructor: Fred Tung ftung@cs.ubc.ca Department of Computer Science University of British Columbia Lecture Notes 2015/2016 Term 2 2 / 55 Menu January 7, 2016 Topics: Image
1 / 55 CPSC 425: Computer Vision Instructor: Fred Tung ftung@cs.ubc.ca Department of Computer Science University of British Columbia Lecture Notes 2015/2016 Term 2 2 / 55 Menu January 7, 2016 Topics: Image
Acquisition. Some slides from: Yung-Yu Chuang (DigiVfx) Jan Neumann, Pat Hanrahan, Alexei Efros
 Jan Neumann, Pat Hanrahan, Alexei Efros") Acquisition Some slides from: Yung-Yu Chuang (DigiVfx) Jan Neumann, Pat Hanrahan, Alexei Efros Image Acquisition Digital Camera Film Outline Pinhole camera Lens Lens aberrations Exposure Sensors Noise
Acquisition Some slides from: Yung-Yu Chuang (DigiVfx) Jan Neumann, Pat Hanrahan, Alexei Efros Image Acquisition Digital Camera Film Outline Pinhole camera Lens Lens aberrations Exposure Sensors Noise
Lecture 8 Camera Models
 Lecture 8 Caera Models Professor Silvio Savarese Coputational Vision and Geoetr Lab Silvio Savarese Lecture 8-5-Oct-4 Lecture 8 Caera Models Pinhole caeras Caeras & lenses The geoetr of pinhole caeras
Lecture 8 Caera Models Professor Silvio Savarese Coputational Vision and Geoetr Lab Silvio Savarese Lecture 8-5-Oct-4 Lecture 8 Caera Models Pinhole caeras Caeras & lenses The geoetr of pinhole caeras
Single-view Metrology and Cameras
 Single-view Metrology and Cameras 10/10/17 Computational Photography Derek Hoiem, University of Illinois Project 2 Results Incomplete list of great project pages Haohang Huang: Best presented project;
Single-view Metrology and Cameras 10/10/17 Computational Photography Derek Hoiem, University of Illinois Project 2 Results Incomplete list of great project pages Haohang Huang: Best presented project;
Cameras and Sensors. Today. Today. It receives light from all directions. BIL721: Computational Photography! Spring 2015, Lecture 2!
 !! Cameras and Sensors Today Pinhole camera! Lenses! Exposure! Sensors! photo by Abelardo Morell BIL721: Computational Photography! Spring 2015, Lecture 2! Aykut Erdem! Hacettepe University! Computer Vision
!! Cameras and Sensors Today Pinhole camera! Lenses! Exposure! Sensors! photo by Abelardo Morell BIL721: Computational Photography! Spring 2015, Lecture 2! Aykut Erdem! Hacettepe University! Computer Vision
Announcements. Image Formation: Outline. The course. How Cameras Produce Images. Earliest Surviving Photograph. Image Formation and Cameras
 Announcements Image ormation and Cameras CSE 252A Lecture 3 Assignment 0: Getting Started with Matlab is posted to web page, due Tuesday, ctober 4. Reading: Szeliski, Chapter 2 ptional Chapters 1 & 2 of
Announcements Image ormation and Cameras CSE 252A Lecture 3 Assignment 0: Getting Started with Matlab is posted to web page, due Tuesday, ctober 4. Reading: Szeliski, Chapter 2 ptional Chapters 1 & 2 of
Capturing Light in man and machine
 Capturing Light in man and machine 15-463: Computational Photography Alexei Efros, CMU, Fall 2008 Image Formation Digital Camera Film The Eye Digital camera A digital camera replaces film with a sensor
Capturing Light in man and machine 15-463: Computational Photography Alexei Efros, CMU, Fall 2008 Image Formation Digital Camera Film The Eye Digital camera A digital camera replaces film with a sensor
Basic principles of photography. David Capel 346B IST
 Basic principles of photography David Capel 346B IST Latin Camera Obscura = Dark Room Light passing through a small hole produces an inverted image on the opposite wall Safely observing the solar eclipse
Basic principles of photography David Capel 346B IST Latin Camera Obscura = Dark Room Light passing through a small hole produces an inverted image on the opposite wall Safely observing the solar eclipse
Capturing Light in man and machine
 Capturing Light in man and machine CS194: Image Manipulation & Computational Photography Alexei Efros, UC Berkeley, Fall 2015 Etymology PHOTOGRAPHY light drawing / writing Image Formation Digital Camera
Capturing Light in man and machine CS194: Image Manipulation & Computational Photography Alexei Efros, UC Berkeley, Fall 2015 Etymology PHOTOGRAPHY light drawing / writing Image Formation Digital Camera
Digital Image Processing Lec 02 - Image Formation - Color Space
 DIP-AMA, Fall 2018 Digital Image Processing Lec 02 - Image Formation - Color Space Zhu Li Dept of CSEE, UMKC Office: FH560E, Email: lizhu@umkc.edu, Ph: x 2346. http://l.web.umkc.edu/lizhu p.1 Outline Recap
DIP-AMA, Fall 2018 Digital Image Processing Lec 02 - Image Formation - Color Space Zhu Li Dept of CSEE, UMKC Office: FH560E, Email: lizhu@umkc.edu, Ph: x 2346. http://l.web.umkc.edu/lizhu p.1 Outline Recap
Dr F. Cuzzolin 1. September 29, 2015
 P00407 Principles of Computer Vision 1 1 Department of Computing and Communication Technologies Oxford Brookes University, UK September 29, 2015 September 29, 2015 1 / 73 Outline of the Lecture 1 2 Basics
P00407 Principles of Computer Vision 1 1 Department of Computing and Communication Technologies Oxford Brookes University, UK September 29, 2015 September 29, 2015 1 / 73 Outline of the Lecture 1 2 Basics
Capturing Light in man and machine. Some figures from Steve Seitz, Steve Palmer, Paul Debevec, and Gonzalez et al.
 Capturing Light in man and machine Some figures from Steve Seitz, Steve Palmer, Paul Debevec, and Gonzalez et al. 15-463: Computational Photography Alexei Efros, CMU, Fall 2005 Image Formation Digital
Capturing Light in man and machine Some figures from Steve Seitz, Steve Palmer, Paul Debevec, and Gonzalez et al. 15-463: Computational Photography Alexei Efros, CMU, Fall 2005 Image Formation Digital
Image Formation and Capture. Acknowledgment: some figures by B. Curless, E. Hecht, W.J. Smith, B.K.P. Horn, and A. Theuwissen
 Image Formation and Capture Acknowledgment: some figures by B. Curless, E. Hecht, W.J. Smith, B.K.P. Horn, and A. Theuwissen Image Formation and Capture Real world Optics Sensor Devices Sources of Error
Image Formation and Capture Acknowledgment: some figures by B. Curless, E. Hecht, W.J. Smith, B.K.P. Horn, and A. Theuwissen Image Formation and Capture Real world Optics Sensor Devices Sources of Error
Digital Image Processing COSC 6380/4393
 Digital Image Processing COSC 6380/4393 Lecture 2 Aug 24 th, 2017 Slides from Dr. Shishir K Shah, Rajesh Rao and Frank (Qingzhong) Liu 1 Instructor TA Digital Image Processing COSC 6380/4393 Pranav Mantini
Digital Image Processing COSC 6380/4393 Lecture 2 Aug 24 th, 2017 Slides from Dr. Shishir K Shah, Rajesh Rao and Frank (Qingzhong) Liu 1 Instructor TA Digital Image Processing COSC 6380/4393 Pranav Mantini
Lenses, exposure, and (de)focus
focus") Lenses, exposure, and (de)focus http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 15 Course announcements Homework 4 is out. - Due October 26
Lenses, exposure, and (de)focus http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 15 Course announcements Homework 4 is out. - Due October 26
Machine Vision: Image Formation
 Machine Vision: Image Formation MediaRobotics Lab, Feb 2010 References: Forsyth / Ponce: Computer Vision Horn: Robot Vision Kodak CCD Primer, #KCP-001 Adaptive Fuzzy Color Interpolation, Journal of Electronic
Machine Vision: Image Formation MediaRobotics Lab, Feb 2010 References: Forsyth / Ponce: Computer Vision Horn: Robot Vision Kodak CCD Primer, #KCP-001 Adaptive Fuzzy Color Interpolation, Journal of Electronic
Capturing Light in man and machine
 Capturing Light in man and machine CS194: Image Manipulation & Computational Photography Alexei Efros, UC Berkeley, Fall 2016 Textbook http://szeliski.org/book/ General Comments Prerequisites Linear algebra!!!
Capturing Light in man and machine CS194: Image Manipulation & Computational Photography Alexei Efros, UC Berkeley, Fall 2016 Textbook http://szeliski.org/book/ General Comments Prerequisites Linear algebra!!!
Capturing Light in man and machine
 Capturing Light in man and machine CS194: Image Manipulation & Computational Photography Alexei Efros, UC Berkeley, Fall 2014 Etymology PHOTOGRAPHY light drawing / writing Image Formation Digital Camera
Capturing Light in man and machine CS194: Image Manipulation & Computational Photography Alexei Efros, UC Berkeley, Fall 2014 Etymology PHOTOGRAPHY light drawing / writing Image Formation Digital Camera
Capturing light and color
 Capturing light and color Friday, 10/02/2017 Antonis Argyros e-mail: argyros@csd.uoc.gr Szeliski 2.2, 2.3, 3.1 1 Recap from last lecture Pinhole camera model Perspective projection Focal length and depth/field
Capturing light and color Friday, 10/02/2017 Antonis Argyros e-mail: argyros@csd.uoc.gr Szeliski 2.2, 2.3, 3.1 1 Recap from last lecture Pinhole camera model Perspective projection Focal length and depth/field
Prof. Feng Liu. Spring /05/2017
 Prof. Feng Liu Spring 2017 http://www.cs.pdx.edu/~fliu/courses/cs510/ 04/05/2017 Last Time Course overview Admin. Info Computational Photography 2 Today Digital Camera History of Camera Controlling Camera
Prof. Feng Liu Spring 2017 http://www.cs.pdx.edu/~fliu/courses/cs510/ 04/05/2017 Last Time Course overview Admin. Info Computational Photography 2 Today Digital Camera History of Camera Controlling Camera
Image Processing & Projective geometry
 Image Processing & Projective geometry Arunkumar Byravan Partial slides borrowed from Jianbo Shi & Steve Seitz Color spaces RGB Red, Green, Blue HSV Hue, Saturation, Value Why HSV? HSV separates luma,
Image Processing & Projective geometry Arunkumar Byravan Partial slides borrowed from Jianbo Shi & Steve Seitz Color spaces RGB Red, Green, Blue HSV Hue, Saturation, Value Why HSV? HSV separates luma,
MEM: Intro to Robotics. Assignment 3I. Due: Wednesday 10/15 11:59 EST
 MEM: Intro to Robotics Assignment 3I Due: Wednesday 10/15 11:59 EST 1. Basic Optics You are shopping for a new lens for your Canon D30 digital camera and there are lots of lens options at the store. Your
MEM: Intro to Robotics Assignment 3I Due: Wednesday 10/15 11:59 EST 1. Basic Optics You are shopping for a new lens for your Canon D30 digital camera and there are lots of lens options at the store. Your
Lenses. Overview. Terminology. The pinhole camera. Pinhole camera Lenses Principles of operation Limitations
 Overview Pinhole camera Principles of operation Limitations 1 Terminology The pinhole camera The first camera - camera obscura - known to Aristotle. In 3D, we can visualize the blur induced by the pinhole
Overview Pinhole camera Principles of operation Limitations 1 Terminology The pinhole camera The first camera - camera obscura - known to Aristotle. In 3D, we can visualize the blur induced by the pinhole
6.098 Digital and Computational Photography Advanced Computational Photography. Bill Freeman Frédo Durand MIT - EECS
 6.098 Digital and Computational Photography 6.882 Advanced Computational Photography Bill Freeman Frédo Durand MIT - EECS Administrivia PSet 1 is out Due Thursday February 23 Digital SLR initiation? During
6.098 Digital and Computational Photography 6.882 Advanced Computational Photography Bill Freeman Frédo Durand MIT - EECS Administrivia PSet 1 is out Due Thursday February 23 Digital SLR initiation? During
Lecture 4: Geometrical Optics 2. Optical Systems. Images and Pupils. Rays. Wavefronts. Aberrations. Outline
 Lecture 4: Geometrical Optics 2 Outline 1 Optical Systems 2 Images and Pupils 3 Rays 4 Wavefronts 5 Aberrations Christoph U. Keller, Leiden University, keller@strw.leidenuniv.nl Lecture 4: Geometrical
Lecture 4: Geometrical Optics 2 Outline 1 Optical Systems 2 Images and Pupils 3 Rays 4 Wavefronts 5 Aberrations Christoph U. Keller, Leiden University, keller@strw.leidenuniv.nl Lecture 4: Geometrical
Digital Image Processing COSC 6380/4393
 Digital Image Processing COSC 6380/4393 Lecture 2 Aug 23 rd, 2018 Slides from Dr. Shishir K Shah, Rajesh Rao and Frank (Qingzhong) Liu 1 Instructor Digital Image Processing COSC 6380/4393 Pranav Mantini
Digital Image Processing COSC 6380/4393 Lecture 2 Aug 23 rd, 2018 Slides from Dr. Shishir K Shah, Rajesh Rao and Frank (Qingzhong) Liu 1 Instructor Digital Image Processing COSC 6380/4393 Pranav Mantini
A Simple Camera Model
 A Simple Camera Model Carlo Tomasi The images we process in computer vision are formed by light bouncing off surfaces in the world and into the lens of the camera. The light then hits an array of sensors
A Simple Camera Model Carlo Tomasi The images we process in computer vision are formed by light bouncing off surfaces in the world and into the lens of the camera. The light then hits an array of sensors
Capturing Light in man and machine
 Capturing Light in man and machine 15-463: Computational Photography Alexei Efros, CMU, Fall 2010 Etymology PHOTOGRAPHY light drawing / writing Image Formation Digital Camera Film The Eye Sensor Array
Capturing Light in man and machine 15-463: Computational Photography Alexei Efros, CMU, Fall 2010 Etymology PHOTOGRAPHY light drawing / writing Image Formation Digital Camera Film The Eye Sensor Array
The eye & corrective lenses
 Phys 102 Lecture 20 The eye & corrective lenses 1 Today we will... Apply concepts from ray optics & lenses Simple optical instruments the camera & the eye Learn about the human eye Accommodation Myopia,
Phys 102 Lecture 20 The eye & corrective lenses 1 Today we will... Apply concepts from ray optics & lenses Simple optical instruments the camera & the eye Learn about the human eye Accommodation Myopia,
Sensors and Sensing Cameras and Camera Calibration
 Sensors and Sensing Cameras and Camera Calibration Todor Stoyanov Mobile Robotics and Olfaction Lab Center for Applied Autonomous Sensor Systems Örebro University, Sweden todor.stoyanov@oru.se 20.11.2014
Sensors and Sensing Cameras and Camera Calibration Todor Stoyanov Mobile Robotics and Olfaction Lab Center for Applied Autonomous Sensor Systems Örebro University, Sweden todor.stoyanov@oru.se 20.11.2014
Megapixels and more. The basics of image processing in digital cameras. Construction of a digital camera
 Megapixels and more The basics of image processing in digital cameras Photography is a technique of preserving pictures with the help of light. The first durable photograph was made by Nicephor Niepce
Megapixels and more The basics of image processing in digital cameras Photography is a technique of preserving pictures with the help of light. The first durable photograph was made by Nicephor Niepce
Phys 531 Lecture 9 30 September 2004 Ray Optics II. + 1 s i. = 1 f
 Phys 531 Lecture 9 30 September 2004 Ray Optics II Last time, developed idea of ray optics approximation to wave theory Introduced paraxial approximation: rays with θ 1 Will continue to use Started disussing
Phys 531 Lecture 9 30 September 2004 Ray Optics II Last time, developed idea of ray optics approximation to wave theory Introduced paraxial approximation: rays with θ 1 Will continue to use Started disussing
Oversubscription. Sorry, not fixed yet. We ll let you know as soon as we can.
 Bela Borsodi Bela Borsodi Oversubscription Sorry, not fixed yet. We ll let you know as soon as we can. CS 143 James Hays Continuing his course many materials, courseworks, based from him + previous staff
Bela Borsodi Bela Borsodi Oversubscription Sorry, not fixed yet. We ll let you know as soon as we can. CS 143 James Hays Continuing his course many materials, courseworks, based from him + previous staff
CS 428: Fall Introduction to. Image formation Color and perception. Andrew Nealen, Rutgers, /8/2010 1
 CS 428: Fall 2010 Introduction to Computer Graphics Image formation Color and perception Andrew Nealen, Rutgers, 2010 9/8/2010 1 Image formation Andrew Nealen, Rutgers, 2010 9/8/2010 2 Image formation
CS 428: Fall 2010 Introduction to Computer Graphics Image formation Color and perception Andrew Nealen, Rutgers, 2010 9/8/2010 1 Image formation Andrew Nealen, Rutgers, 2010 9/8/2010 2 Image formation
Geometrical Optics Optical systems
 Phys 322 Lecture 16 Chapter 5 Geometrical Optics Optical systems Magnifying glass Purpose: enlarge a nearby object by increasing its image size on retina Requirements: Image should not be inverted Image
Phys 322 Lecture 16 Chapter 5 Geometrical Optics Optical systems Magnifying glass Purpose: enlarge a nearby object by increasing its image size on retina Requirements: Image should not be inverted Image
Chapters 1 & 2. Definitions and applications Conceptual basis of photogrammetric processing
 Chapters 1 & 2 Chapter 1: Photogrammetry Definitions and applications Conceptual basis of photogrammetric processing Transition from two-dimensional imagery to three-dimensional information Automation
Chapters 1 & 2 Chapter 1: Photogrammetry Definitions and applications Conceptual basis of photogrammetric processing Transition from two-dimensional imagery to three-dimensional information Automation
TSBB09 Image Sensors 2018-HT2. Image Formation Part 1
 TSBB09 Image Sensors 2018-HT2 Image Formation Part 1 Basic physics Electromagnetic radiation consists of electromagnetic waves With energy That propagate through space The waves consist of transversal
TSBB09 Image Sensors 2018-HT2 Image Formation Part 1 Basic physics Electromagnetic radiation consists of electromagnetic waves With energy That propagate through space The waves consist of transversal
DIGITAL IMAGE PROCESSING
 DIGITAL IMAGE PROCESSING Lecture 1 Introduction Tammy Riklin Raviv Electrical and Computer Engineering Ben-Gurion University of the Negev 2 Introduction to Digital Image Processing Lecturer: Dr. Tammy
DIGITAL IMAGE PROCESSING Lecture 1 Introduction Tammy Riklin Raviv Electrical and Computer Engineering Ben-Gurion University of the Negev 2 Introduction to Digital Image Processing Lecturer: Dr. Tammy
Proj 2. Looks like the evaluation function changed in converting to Python, and 80% on Notre Dame is more tricky to reach.
 Proj 2 Looks like the evaluation function changed in converting to Python, and 80% on Notre Dame is more tricky to reach. We will tweak the percentages. Leaderboard / Gradescope is up. Extra Credit Please
Proj 2 Looks like the evaluation function changed in converting to Python, and 80% on Notre Dame is more tricky to reach. We will tweak the percentages. Leaderboard / Gradescope is up. Extra Credit Please
Waitlist. We ll let you know as soon as we can. Biggest issue is TAs
 Bela Borsodi Bela Borsodi Waitlist We ll let you know as soon as we can. Biggest issue is TAs CS 143 James Hays Many materials, courseworks, based from him + previous TA staff serious thanks! Textbook
Bela Borsodi Bela Borsodi Waitlist We ll let you know as soon as we can. Biggest issue is TAs CS 143 James Hays Many materials, courseworks, based from him + previous TA staff serious thanks! Textbook
Virtual and Digital Cameras
 CS148: Introduction to Computer Graphics and Imaging Virtual and Digital Cameras Ansel Adams Topics Effect Cause Field of view Film size, focal length Perspective Lens, focal length Focus Dist. of lens
CS148: Introduction to Computer Graphics and Imaging Virtual and Digital Cameras Ansel Adams Topics Effect Cause Field of view Film size, focal length Perspective Lens, focal length Focus Dist. of lens
Getting light to imager. Capturing Images. Depth and Distance. Ideal Imaging. CS559 Lecture 2 Lights, Cameras, Eyes
 CS559 Lecture 2 Lights, Cameras, Eyes Last time: what is an image idea of image-based (raster representation) Today: image capture/acquisition, focus cameras and eyes displays and intensities Corrected
CS559 Lecture 2 Lights, Cameras, Eyes Last time: what is an image idea of image-based (raster representation) Today: image capture/acquisition, focus cameras and eyes displays and intensities Corrected
6.A44 Computational Photography
 Add date: Friday 6.A44 Computational Photography Depth of Field Frédo Durand We allow for some tolerance What happens when we close the aperture by two stop? Aperture diameter is divided by two is doubled
Add date: Friday 6.A44 Computational Photography Depth of Field Frédo Durand We allow for some tolerance What happens when we close the aperture by two stop? Aperture diameter is divided by two is doubled
Capturing Light. The Light Field. Grayscale Snapshot 12/1/16. P(q, f)
") Capturing Light Rooms by the Sea, Edward Hopper, 1951 The Penitent Magdalen, Georges de La Tour, c. 1640 Some slides from M. Agrawala, F. Durand, P. Debevec, A. Efros, R. Fergus, D. Forsyth, M. Levoy,
Capturing Light Rooms by the Sea, Edward Hopper, 1951 The Penitent Magdalen, Georges de La Tour, c. 1640 Some slides from M. Agrawala, F. Durand, P. Debevec, A. Efros, R. Fergus, D. Forsyth, M. Levoy,
Cameras. Steve Rotenberg CSE168: Rendering Algorithms UCSD, Spring 2017
 Cameras Steve Rotenberg CSE168: Rendering Algorithms UCSD, Spring 2017 Camera Focus Camera Focus So far, we have been simulating pinhole cameras with perfect focus Often times, we want to simulate more
Cameras Steve Rotenberg CSE168: Rendering Algorithms UCSD, Spring 2017 Camera Focus Camera Focus So far, we have been simulating pinhole cameras with perfect focus Often times, we want to simulate more
Lenses. Images. Difference between Real and Virtual Images
 Linear Magnification (m) This is the factor by which the size of the object has been magnified by the lens in a direction which is perpendicular to the axis of the lens. Linear magnification can be calculated
Linear Magnification (m) This is the factor by which the size of the object has been magnified by the lens in a direction which is perpendicular to the axis of the lens. Linear magnification can be calculated
Astronomical Cameras
 Astronomical Cameras I. The Pinhole Camera Pinhole Camera (or Camera Obscura) Whenever light passes through a small hole or aperture it creates an image opposite the hole This is an effect wherever apertures
Astronomical Cameras I. The Pinhole Camera Pinhole Camera (or Camera Obscura) Whenever light passes through a small hole or aperture it creates an image opposite the hole This is an effect wherever apertures
Motion Picture Origins. What do we need to make moving pictures work?
 Motion Picture Origins What do we need to make moving pictures work? Two Necessary Illusions 1. Persistence of vision The tendency of the retina to retain an image for a fraction of a second after the
Motion Picture Origins What do we need to make moving pictures work? Two Necessary Illusions 1. Persistence of vision The tendency of the retina to retain an image for a fraction of a second after the
Frequencies and Color
 Frequencies and Color Alexei Efros, CS280, Spring 2018 Salvador Dali Gala Contemplating the Mediterranean Sea, which at 30 meters becomes the portrait of Abraham Lincoln, 1976 Spatial Frequencies and
Frequencies and Color Alexei Efros, CS280, Spring 2018 Salvador Dali Gala Contemplating the Mediterranean Sea, which at 30 meters becomes the portrait of Abraham Lincoln, 1976 Spatial Frequencies and
Image Formation. World Optics Sensor Signal. Computer Vision. Introduction to. Light (Energy) Source. Surface Imaging Plane. Pinhole Lens.
 Source. Surface Imaging Plane. Pinhole Lens.") Image Formation Light (Energy) Source Surface Imaging Plane Pinhole Lens World Optics Sensor Signal B&W Film Color Film TV Camera Silver Density Silver density in three color layers Electrical Today Optics:
Image Formation Light (Energy) Source Surface Imaging Plane Pinhole Lens World Optics Sensor Signal B&W Film Color Film TV Camera Silver Density Silver density in three color layers Electrical Today Optics:
Lenses. A lens is any glass, plastic or transparent refractive medium with two opposite faces, and at least one of the faces must be curved.
 PHYSICS NOTES ON A lens is any glass, plastic or transparent refractive medium with two opposite faces, and at least one of the faces must be curved. Types of There are two types of basic lenses. (1.)
PHYSICS NOTES ON A lens is any glass, plastic or transparent refractive medium with two opposite faces, and at least one of the faces must be curved. Types of There are two types of basic lenses. (1.)
brief history of photography foveon X3 imager technology description
 brief history of photography foveon X3 imager technology description imaging technology 30,000 BC chauvet-pont-d arc pinhole camera principle first described by Aristotle fourth century B.C. oldest known
brief history of photography foveon X3 imager technology description imaging technology 30,000 BC chauvet-pont-d arc pinhole camera principle first described by Aristotle fourth century B.C. oldest known
Overview. Image formation - 1
 Overview perspective imaging Image formation Refraction of light Thin-lens equation Optical power and accommodation Image irradiance and scene radiance Digital images Introduction to MATLAB Image formation
Overview perspective imaging Image formation Refraction of light Thin-lens equation Optical power and accommodation Image irradiance and scene radiance Digital images Introduction to MATLAB Image formation
Reading. 1. Visual perception. Outline. Forming an image. Optional: Glassner, Principles of Digital Image Synthesis, sections
 Reading Optional: Glassner, Principles of Digital mage Synthesis, sections 1.1-1.6. 1. Visual perception Brian Wandell. Foundations of Vision. Sinauer Associates, Sunderland, MA, 1995. Research papers:
Reading Optional: Glassner, Principles of Digital mage Synthesis, sections 1.1-1.6. 1. Visual perception Brian Wandell. Foundations of Vision. Sinauer Associates, Sunderland, MA, 1995. Research papers:
Chapter 36. Image Formation
 Chapter 36 Image Formation Image of Formation Images can result when light rays encounter flat or curved surfaces between two media. Images can be formed either by reflection or refraction due to these
Chapter 36 Image Formation Image of Formation Images can result when light rays encounter flat or curved surfaces between two media. Images can be formed either by reflection or refraction due to these
ECEN 4606, UNDERGRADUATE OPTICS LAB
 ECEN 4606, UNDERGRADUATE OPTICS LAB Lab 2: Imaging 1 the Telescope Original Version: Prof. McLeod SUMMARY: In this lab you will become familiar with the use of one or more lenses to create images of distant
ECEN 4606, UNDERGRADUATE OPTICS LAB Lab 2: Imaging 1 the Telescope Original Version: Prof. McLeod SUMMARY: In this lab you will become familiar with the use of one or more lenses to create images of distant
INTRODUCTION THIN LENSES. Introduction. given by the paraxial refraction equation derived last lecture: Thin lenses (19.1) = 1. Double-lens systems
 = 1. Double-lens systems") Chapter 9 OPTICAL INSTRUMENTS Introduction Thin lenses Double-lens systems Aberrations Camera Human eye Compound microscope Summary INTRODUCTION Knowledge of geometrical optics, diffraction and interference,
Chapter 9 OPTICAL INSTRUMENTS Introduction Thin lenses Double-lens systems Aberrations Camera Human eye Compound microscope Summary INTRODUCTION Knowledge of geometrical optics, diffraction and interference,
What will be on the midterm?
 What will be on the midterm? CS 178, Spring 2014 Marc Levoy Computer Science Department Stanford University General information 2 Monday, 7-9pm, Cubberly Auditorium (School of Edu) closed book, no notes
What will be on the midterm? CS 178, Spring 2014 Marc Levoy Computer Science Department Stanford University General information 2 Monday, 7-9pm, Cubberly Auditorium (School of Edu) closed book, no notes