How do we see the world?
|
|
|
- Angelina Moore
- 5 years ago
- Views:
Transcription
1 The Camera 1
2 How do we see the world? Let s design a camera Idea 1: put a piece of film in front of an object Do we get a reasonable image? Credit: Steve Seitz 2
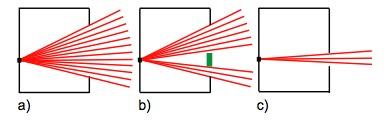
3 Pinhole camera Idea 2: Add a barrier to block off most of the rays This reduces blurring The opening known as the aperture How does this transform the image? Credit: Steve Seitz 3
4 Pinhole camera model Pinhole model: Captures pencil of rays all rays through a single point The point is called Center of Projection (COP) The image is formed on the Image Plane Effective focal length f is distance from COP to Image Plane Credit: Steve Seitz 4

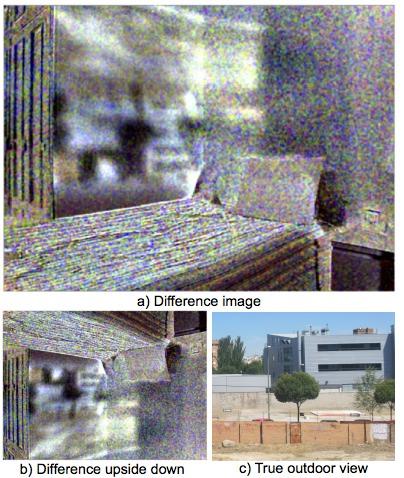
5 Camera Obscura The first camera Known to Aristotle Depth of the room is the effective focal length Camera Obscura, Gemma Frisius,

6 ABELARDO MORELL 6

7 7

8 8

9 9





10 10

11 11


12 Project 5: a Shoe-box Camera Obscura 12


13 Another way to make pinhole camera Why so blurry? 13

14 Shrinking the aperture Less light gets through Why not make the aperture as small as possible? Less light gets through Diffraction effects Credit: Steve Seitz 14
15 Shrinking the aperture 15
16 3D to 2D Perspective projection 16
17 Dimensionality Reduction Machine (3D to 2D) 3D world 2D image What have we lost? Angles Distances (lengths) Figures Stephen E. Palmer,

18 Funny things happen 18
19 Parallel lines aren t Figure by David Forsyth 19
20 Lengths can t be trusted... Can you find the mistake in this figure? Credit: David Forsyth 20

21 but humans adapt! Müller-Lyer Illusion We don t make measurements in the image plane 21
22 Projecting 3D to 2D (Perspective, Orthographic, Weak Perspective) 22
23 Perspective Projection The coordinate system: Pin-hole model as an approximation Optical center (Center Of Projection) at the origin Put the image plane (Projection Plane) in front of the COP Why? Camera looks down the negative z axis we need this if we want right-handedcoordinates Credit: Steve Seitz 23
24 Projection on the image plane Projection equations Compute intersection with PP of ray from (x,y,z) to COP Derived using similar triangles (on board) We get the projection by throwing out the last coordinate: How do we express this in matrix form? Credit: Steve Seitz 24
25 . Y.. X. (x, y) (X, Y, Z) Z Compute intersection Compute projection 1. Divide by w Projection matrix 3D point 2. Drop off last coordinate Projection on the image plane 25

26 Orthographic Projection Special case of perspective projection Distance from the COP to the PP is infinite Image World Also called parallel projection What s the projection matrix? Credit: Steve Seitz 26
27 Weak Perspective Projection average distance divide by w, drop z 27
28 Using lenses 28
29 Credit: Steve Seitz 29
30 Focus and Defocus Object Lens Film circle of confusion A lens focuses light onto the film There is a specific distance at which objects are in focus other points project to a circle of confusion in the image Changing the shape of the lens changes this distance Credit: Steve Seitz 30
31 Thin lenses Thin lens equation: Any object point satisfying this equation is in focus What is the shape of the focus region? How can we change the focus region? Credit: Steve Seitz 31

32 The thin lens assumption assumes the lens has no thickness, but this isn t true Object Lens Film Focal point By adding more elements to the lens, the distance at which a scene is in focus can be made roughly planar. Credit: Steve Seitz 32

33 33

34 Depth of Field 34


35 Depth of field Aperture Film f / 5.6 f / 32 Changing the aperture size affects depth of field A smaller aperture increases the range in which the object is approximately in focus But small aperture reduces amount of light need to increase exposure

36 Large aperture = small DOF Small aperture = large DOF 36

37 37
")
38 Field of View (Zoom) 38
 =")
39 Field of View (Zoom) = Cropping 39
40 FOV depends of Focal Length f Smaller FOV = larger Focal Length 40



41 Sigma mm F2.8 EX DG lens What does 1600mm lens look like?

42 Varying focal length and distance Credit: Zisserman & Hartley 42


43 Field of View / Focal Length Large FOV, small f Camera close to car Small FOV, large f Camera far from the car 43

44 44

45 45
46 Points to remember Optimal aperture of pinhole camera is between the geometric and diffraction limit 3 projection models (perspective, orthographic, weak perspective) When using a lens: change aperture size ==> change depth of field change focal length ==> change in field of view change focal length and camera distance ==> changes projection effect 46
The Camera : Computational Photography Alexei Efros, CMU, Fall 2008
 The Camera 15-463: Computational Photography Alexei Efros, CMU, Fall 2008 How do we see the world? object film Let s design a camera Idea 1: put a piece of film in front of an object Do we get a reasonable
The Camera 15-463: Computational Photography Alexei Efros, CMU, Fall 2008 How do we see the world? object film Let s design a camera Idea 1: put a piece of film in front of an object Do we get a reasonable
Two strategies for realistic rendering capture real world data synthesize from bottom up
 Recap from Wednesday Two strategies for realistic rendering capture real world data synthesize from bottom up Both have existed for 500 years. Both are successful. Attempts to take the best of both world
Recap from Wednesday Two strategies for realistic rendering capture real world data synthesize from bottom up Both have existed for 500 years. Both are successful. Attempts to take the best of both world
The Camera : Computational Photography Alexei Efros, CMU, Fall 2005
 The Camera 15-463: Computational Photography Alexei Efros, CMU, Fall 2005 How do we see the world? object film Let s design a camera Idea 1: put a piece of film in front of an object Do we get a reasonable
The Camera 15-463: Computational Photography Alexei Efros, CMU, Fall 2005 How do we see the world? object film Let s design a camera Idea 1: put a piece of film in front of an object Do we get a reasonable
To Do. Advanced Computer Graphics. Outline. Computational Imaging. How do we see the world? Pinhole camera
 Advanced Computer Graphics CSE 163 [Spring 2017], Lecture 14 Ravi Ramamoorthi http://www.cs.ucsd.edu/~ravir To Do Assignment 2 due May 19 Any last minute issues or questions? Next two lectures: Imaging,
Advanced Computer Graphics CSE 163 [Spring 2017], Lecture 14 Ravi Ramamoorthi http://www.cs.ucsd.edu/~ravir To Do Assignment 2 due May 19 Any last minute issues or questions? Next two lectures: Imaging,
Projection. Readings. Szeliski 2.1. Wednesday, October 23, 13
 Projection Readings Szeliski 2.1 Projection Readings Szeliski 2.1 Müller-Lyer Illusion by Pravin Bhat Müller-Lyer Illusion by Pravin Bhat http://www.michaelbach.de/ot/sze_muelue/index.html Müller-Lyer
Projection Readings Szeliski 2.1 Projection Readings Szeliski 2.1 Müller-Lyer Illusion by Pravin Bhat Müller-Lyer Illusion by Pravin Bhat http://www.michaelbach.de/ot/sze_muelue/index.html Müller-Lyer
Projection. Announcements. Müller-Lyer Illusion. Image formation. Readings Nalwa 2.1
 Announcements Mailing list (you should have received messages) Project 1 additional test sequences online Projection Readings Nalwa 2.1 Müller-Lyer Illusion Image formation object film by Pravin Bhat http://www.michaelbach.de/ot/sze_muelue/index.html
Announcements Mailing list (you should have received messages) Project 1 additional test sequences online Projection Readings Nalwa 2.1 Müller-Lyer Illusion Image formation object film by Pravin Bhat http://www.michaelbach.de/ot/sze_muelue/index.html
Image Formation. Dr. Gerhard Roth. COMP 4102A Winter 2015 Version 3
 Image Formation Dr. Gerhard Roth COMP 4102A Winter 2015 Version 3 1 Image Formation Two type of images Intensity image encodes light intensities (passive sensor) Range (depth) image encodes shape and distance
Image Formation Dr. Gerhard Roth COMP 4102A Winter 2015 Version 3 1 Image Formation Two type of images Intensity image encodes light intensities (passive sensor) Range (depth) image encodes shape and distance
Building a Real Camera. Slides Credit: Svetlana Lazebnik
 Building a Real Camera Slides Credit: Svetlana Lazebnik Home-made pinhole camera Slide by A. Efros http://www.debevec.org/pinhole/ Shrinking the aperture Why not make the aperture as small as possible?
Building a Real Camera Slides Credit: Svetlana Lazebnik Home-made pinhole camera Slide by A. Efros http://www.debevec.org/pinhole/ Shrinking the aperture Why not make the aperture as small as possible?
Projection. Projection. Image formation. Müller-Lyer Illusion. Readings. Readings. Let s design a camera. Szeliski 2.1. Szeliski 2.
 Projection Projection Readings Szeliski 2.1 Readings Szeliski 2.1 Müller-Lyer Illusion Image formation object film by Pravin Bhat http://www.michaelbach.de/ot/sze_muelue/index.html Let s design a camera
Projection Projection Readings Szeliski 2.1 Readings Szeliski 2.1 Müller-Lyer Illusion Image formation object film by Pravin Bhat http://www.michaelbach.de/ot/sze_muelue/index.html Let s design a camera
Building a Real Camera
 Building a Real Camera Home-made pinhole camera Slide by A. Efros http://www.debevec.org/pinhole/ Shrinking the aperture Why not make the aperture as small as possible? Less light gets through Diffraction
Building a Real Camera Home-made pinhole camera Slide by A. Efros http://www.debevec.org/pinhole/ Shrinking the aperture Why not make the aperture as small as possible? Less light gets through Diffraction
Cameras. CSE 455, Winter 2010 January 25, 2010
 Cameras CSE 455, Winter 2010 January 25, 2010 Announcements New Lecturer! Neel Joshi, Ph.D. Post-Doctoral Researcher Microsoft Research neel@cs Project 1b (seam carving) was due on Friday the 22 nd Project
Cameras CSE 455, Winter 2010 January 25, 2010 Announcements New Lecturer! Neel Joshi, Ph.D. Post-Doctoral Researcher Microsoft Research neel@cs Project 1b (seam carving) was due on Friday the 22 nd Project
Unit 1: Image Formation
 Unit 1: Image Formation 1. Geometry 2. Optics 3. Photometry 4. Sensor Readings Szeliski 2.1-2.3 & 6.3.5 1 Physical parameters of image formation Geometric Type of projection Camera pose Optical Sensor
Unit 1: Image Formation 1. Geometry 2. Optics 3. Photometry 4. Sensor Readings Szeliski 2.1-2.3 & 6.3.5 1 Physical parameters of image formation Geometric Type of projection Camera pose Optical Sensor
Image Formation. Dr. Gerhard Roth. COMP 4102A Winter 2014 Version 1
 Image Formation Dr. Gerhard Roth COMP 4102A Winter 2014 Version 1 Image Formation Two type of images Intensity image encodes light intensities (passive sensor) Range (depth) image encodes shape and distance
Image Formation Dr. Gerhard Roth COMP 4102A Winter 2014 Version 1 Image Formation Two type of images Intensity image encodes light intensities (passive sensor) Range (depth) image encodes shape and distance
CS6670: Computer Vision
 CS6670: Computer Vision Noah Snavely Lecture 5: Cameras and Projection Szeliski 2.1.3-2.1.6 Reading Announcements Project 1 assigned, see projects page: http://www.cs.cornell.edu/courses/cs6670/2011sp/projects/projects.html
CS6670: Computer Vision Noah Snavely Lecture 5: Cameras and Projection Szeliski 2.1.3-2.1.6 Reading Announcements Project 1 assigned, see projects page: http://www.cs.cornell.edu/courses/cs6670/2011sp/projects/projects.html
Image formation - Cameras. Grading & Project. About the course. Tentative Schedule. Course Content. Students introduction
 About the course Instructors: Haibin Ling (hbling@temple, Wachman 35) Hours Lecture: Tuesda 5:3-8:pm, TTLMAN 43B Office hour: Tuesda 3: - 5:pm, or b appointment Textbook Computer Vision: Models, Learning,
About the course Instructors: Haibin Ling (hbling@temple, Wachman 35) Hours Lecture: Tuesda 5:3-8:pm, TTLMAN 43B Office hour: Tuesda 3: - 5:pm, or b appointment Textbook Computer Vision: Models, Learning,
CSE 473/573 Computer Vision and Image Processing (CVIP)
") CSE 473/573 Computer Vision and Image Processing (CVIP) Ifeoma Nwogu inwogu@buffalo.edu Lecture 4 Image formation(part I) Schedule Last class linear algebra overview Today Image formation and camera properties
CSE 473/573 Computer Vision and Image Processing (CVIP) Ifeoma Nwogu inwogu@buffalo.edu Lecture 4 Image formation(part I) Schedule Last class linear algebra overview Today Image formation and camera properties
Overview. Pinhole camera model Projective geometry Vanishing points and lines Projection matrix Cameras with Lenses Color Digital image
 Camera & Color Overview Pinhole camera model Projective geometry Vanishing points and lines Projection matrix Cameras with Lenses Color Digital image Book: Hartley 6.1, Szeliski 2.1.5, 2.2, 2.3 The trip
Camera & Color Overview Pinhole camera model Projective geometry Vanishing points and lines Projection matrix Cameras with Lenses Color Digital image Book: Hartley 6.1, Szeliski 2.1.5, 2.2, 2.3 The trip
Computer Vision. The Pinhole Camera Model
 Computer Vision The Pinhole Camera Model Filippo Bergamasco (filippo.bergamasco@unive.it) http://www.dais.unive.it/~bergamasco DAIS, Ca Foscari University of Venice Academic year 2017/2018 Imaging device
Computer Vision The Pinhole Camera Model Filippo Bergamasco (filippo.bergamasco@unive.it) http://www.dais.unive.it/~bergamasco DAIS, Ca Foscari University of Venice Academic year 2017/2018 Imaging device
CS6670: Computer Vision
 CS6670: Computer Vision Noah Snavely Lecture 4a: Cameras Source: S. Lazebnik Reading Szeliski chapter 2.2.3, 2.3 Image formation Let s design a camera Idea 1: put a piece of film in front of an object
CS6670: Computer Vision Noah Snavely Lecture 4a: Cameras Source: S. Lazebnik Reading Szeliski chapter 2.2.3, 2.3 Image formation Let s design a camera Idea 1: put a piece of film in front of an object
IMAGE FORMATION. Light source properties. Sensor characteristics Surface. Surface reflectance properties. Optics
 IMAGE FORMATION Light source properties Sensor characteristics Surface Exposure shape Optics Surface reflectance properties ANALOG IMAGES An image can be understood as a 2D light intensity function f(x,y)
IMAGE FORMATION Light source properties Sensor characteristics Surface Exposure shape Optics Surface reflectance properties ANALOG IMAGES An image can be understood as a 2D light intensity function f(x,y)
Single-view Metrology and Cameras
 Single-view Metrology and Cameras 10/10/17 Computational Photography Derek Hoiem, University of Illinois Project 2 Results Incomplete list of great project pages Haohang Huang: Best presented project;
Single-view Metrology and Cameras 10/10/17 Computational Photography Derek Hoiem, University of Illinois Project 2 Results Incomplete list of great project pages Haohang Huang: Best presented project;
Announcement A total of 5 (five) late days are allowed for projects. Office hours
 late days are allowed for projects. Office hours") Announcement A total of 5 (five) late days are allowed for projects. Office hours Me: 3:50-4:50pm Thursday (or by appointment) Jake: 12:30-1:30PM Monday and Wednesday Image Formation Digital Camera Film
Announcement A total of 5 (five) late days are allowed for projects. Office hours Me: 3:50-4:50pm Thursday (or by appointment) Jake: 12:30-1:30PM Monday and Wednesday Image Formation Digital Camera Film
6.098 Digital and Computational Photography Advanced Computational Photography. Bill Freeman Frédo Durand MIT - EECS
 6.098 Digital and Computational Photography 6.882 Advanced Computational Photography Bill Freeman Frédo Durand MIT - EECS Administrivia PSet 1 is out Due Thursday February 23 Digital SLR initiation? During
6.098 Digital and Computational Photography 6.882 Advanced Computational Photography Bill Freeman Frédo Durand MIT - EECS Administrivia PSet 1 is out Due Thursday February 23 Digital SLR initiation? During
Acquisition. Some slides from: Yung-Yu Chuang (DigiVfx) Jan Neumann, Pat Hanrahan, Alexei Efros
 Jan Neumann, Pat Hanrahan, Alexei Efros") Acquisition Some slides from: Yung-Yu Chuang (DigiVfx) Jan Neumann, Pat Hanrahan, Alexei Efros Image Acquisition Digital Camera Film Outline Pinhole camera Lens Lens aberrations Exposure Sensors Noise
Acquisition Some slides from: Yung-Yu Chuang (DigiVfx) Jan Neumann, Pat Hanrahan, Alexei Efros Image Acquisition Digital Camera Film Outline Pinhole camera Lens Lens aberrations Exposure Sensors Noise
LENSES. INEL 6088 Computer Vision
 LENSES INEL 6088 Computer Vision Digital camera A digital camera replaces film with a sensor array Each cell in the array is a Charge Coupled Device light-sensitive diode that converts photons to electrons
LENSES INEL 6088 Computer Vision Digital camera A digital camera replaces film with a sensor array Each cell in the array is a Charge Coupled Device light-sensitive diode that converts photons to electrons
VC 16/17 TP2 Image Formation
 VC 16/17 TP2 Image Formation Mestrado em Ciência de Computadores Mestrado Integrado em Engenharia de Redes e Sistemas Informáticos Hélder Filipe Pinto de Oliveira Outline Computer Vision? The Human Visual
VC 16/17 TP2 Image Formation Mestrado em Ciência de Computadores Mestrado Integrado em Engenharia de Redes e Sistemas Informáticos Hélder Filipe Pinto de Oliveira Outline Computer Vision? The Human Visual
Lecture 7: Camera Models
 Lecture 7: Camera Models Professor Stanford Vision Lab 1 What we will learn toda? Pinhole cameras Cameras & lenses The geometr of pinhole cameras Reading: [FP]Chapters 1 3 [HZ] Chapter 6 2 What we will
Lecture 7: Camera Models Professor Stanford Vision Lab 1 What we will learn toda? Pinhole cameras Cameras & lenses The geometr of pinhole cameras Reading: [FP]Chapters 1 3 [HZ] Chapter 6 2 What we will
Lecture 02 Image Formation 1
 Institute of Informatics Institute of Neuroinformatics Lecture 02 Image Formation 1 Davide Scaramuzza http://rpg.ifi.uzh.ch 1 Lab Exercise 1 - Today afternoon Room ETH HG E 1.1 from 13:15 to 15:00 Work
Institute of Informatics Institute of Neuroinformatics Lecture 02 Image Formation 1 Davide Scaramuzza http://rpg.ifi.uzh.ch 1 Lab Exercise 1 - Today afternoon Room ETH HG E 1.1 from 13:15 to 15:00 Work
VC 11/12 T2 Image Formation
 VC 11/12 T2 Image Formation Mestrado em Ciência de Computadores Mestrado Integrado em Engenharia de Redes e Sistemas Informáticos Miguel Tavares Coimbra Outline Computer Vision? The Human Visual System
VC 11/12 T2 Image Formation Mestrado em Ciência de Computadores Mestrado Integrado em Engenharia de Redes e Sistemas Informáticos Miguel Tavares Coimbra Outline Computer Vision? The Human Visual System
Lecture 2 Camera Models
 Lecture 2 Camera Models Professor Silvio Savarese Computational Vision and Geometr Lab Silvio Savarese Lecture 2-4-Jan-4 Announcements Prerequisites: an questions? This course requires knowledge of linear
Lecture 2 Camera Models Professor Silvio Savarese Computational Vision and Geometr Lab Silvio Savarese Lecture 2-4-Jan-4 Announcements Prerequisites: an questions? This course requires knowledge of linear
Image Formation. World Optics Sensor Signal. Computer Vision. Introduction to. Light (Energy) Source. Surface Imaging Plane. Pinhole Lens.
 Source. Surface Imaging Plane. Pinhole Lens.") Image Formation Light (Energy) Source Surface Imaging Plane Pinhole Lens World Optics Sensor Signal B&W Film Color Film TV Camera Silver Density Silver density in three color layers Electrical Today Optics:
Image Formation Light (Energy) Source Surface Imaging Plane Pinhole Lens World Optics Sensor Signal B&W Film Color Film TV Camera Silver Density Silver density in three color layers Electrical Today Optics:
VC 14/15 TP2 Image Formation
 VC 14/15 TP2 Image Formation Mestrado em Ciência de Computadores Mestrado Integrado em Engenharia de Redes e Sistemas Informáticos Miguel Tavares Coimbra Outline Computer Vision? The Human Visual System
VC 14/15 TP2 Image Formation Mestrado em Ciência de Computadores Mestrado Integrado em Engenharia de Redes e Sistemas Informáticos Miguel Tavares Coimbra Outline Computer Vision? The Human Visual System
Lenses, exposure, and (de)focus
focus") Lenses, exposure, and (de)focus http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 15 Course announcements Homework 4 is out. - Due October 26
Lenses, exposure, and (de)focus http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 15 Course announcements Homework 4 is out. - Due October 26
Image Formation. Light from distant things. Geometrical optics. Pinhole camera. Chapter 36
 Light from distant things Chapter 36 We learn about a distant thing from the light it generates or redirects. The lenses in our eyes create images of objects our brains can process. This chapter concerns
Light from distant things Chapter 36 We learn about a distant thing from the light it generates or redirects. The lenses in our eyes create images of objects our brains can process. This chapter concerns
Colorado School of Mines. Computer Vision. Professor William Hoff Dept of Electrical Engineering &Computer Science.
 Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Sensors and Image Formation Imaging sensors and models of image formation Coordinate systems Digital
Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Sensors and Image Formation Imaging sensors and models of image formation Coordinate systems Digital
Proj 2. Looks like the evaluation function changed in converting to Python, and 80% on Notre Dame is more tricky to reach.
 Proj 2 Looks like the evaluation function changed in converting to Python, and 80% on Notre Dame is more tricky to reach. We will tweak the percentages. Leaderboard / Gradescope is up. Extra Credit Please
Proj 2 Looks like the evaluation function changed in converting to Python, and 80% on Notre Dame is more tricky to reach. We will tweak the percentages. Leaderboard / Gradescope is up. Extra Credit Please
Cameras. Digital Visual Effects, Spring 2008 Yung-Yu Chuang 2008/2/26. with slides by Fredo Durand, Brian Curless, Steve Seitz and Alexei Efros
 Cameras Digital Visual Effects, Spring 2008 Yung-Yu Chuang 2008/2/26 with slides by Fredo Durand, Brian Curless, Steve Seitz and Alexei Efros Camera trial #1 scene film Put a piece of film in front of
Cameras Digital Visual Effects, Spring 2008 Yung-Yu Chuang 2008/2/26 with slides by Fredo Durand, Brian Curless, Steve Seitz and Alexei Efros Camera trial #1 scene film Put a piece of film in front of
Image Processing & Projective geometry
 Image Processing & Projective geometry Arunkumar Byravan Partial slides borrowed from Jianbo Shi & Steve Seitz Color spaces RGB Red, Green, Blue HSV Hue, Saturation, Value Why HSV? HSV separates luma,
Image Processing & Projective geometry Arunkumar Byravan Partial slides borrowed from Jianbo Shi & Steve Seitz Color spaces RGB Red, Green, Blue HSV Hue, Saturation, Value Why HSV? HSV separates luma,
Cameras. Steve Rotenberg CSE168: Rendering Algorithms UCSD, Spring 2017
 Cameras Steve Rotenberg CSE168: Rendering Algorithms UCSD, Spring 2017 Camera Focus Camera Focus So far, we have been simulating pinhole cameras with perfect focus Often times, we want to simulate more
Cameras Steve Rotenberg CSE168: Rendering Algorithms UCSD, Spring 2017 Camera Focus Camera Focus So far, we have been simulating pinhole cameras with perfect focus Often times, we want to simulate more
Cameras and Sensors. Today. Today. It receives light from all directions. BIL721: Computational Photography! Spring 2015, Lecture 2!
 !! Cameras and Sensors Today Pinhole camera! Lenses! Exposure! Sensors! photo by Abelardo Morell BIL721: Computational Photography! Spring 2015, Lecture 2! Aykut Erdem! Hacettepe University! Computer Vision
!! Cameras and Sensors Today Pinhole camera! Lenses! Exposure! Sensors! photo by Abelardo Morell BIL721: Computational Photography! Spring 2015, Lecture 2! Aykut Erdem! Hacettepe University! Computer Vision
Virtual and Digital Cameras
 CS148: Introduction to Computer Graphics and Imaging Virtual and Digital Cameras Ansel Adams Topics Effect Cause Field of view Film size, focal length Perspective Lens, focal length Focus Dist. of lens
CS148: Introduction to Computer Graphics and Imaging Virtual and Digital Cameras Ansel Adams Topics Effect Cause Field of view Film size, focal length Perspective Lens, focal length Focus Dist. of lens
Image Formation and Capture. Acknowledgment: some figures by B. Curless, E. Hecht, W.J. Smith, B.K.P. Horn, and A. Theuwissen
 Image Formation and Capture Acknowledgment: some figures by B. Curless, E. Hecht, W.J. Smith, B.K.P. Horn, and A. Theuwissen Image Formation and Capture Real world Optics Sensor Devices Sources of Error
Image Formation and Capture Acknowledgment: some figures by B. Curless, E. Hecht, W.J. Smith, B.K.P. Horn, and A. Theuwissen Image Formation and Capture Real world Optics Sensor Devices Sources of Error
Digital Image Processing COSC 6380/4393
 Digital Image Processing COSC 6380/4393 Lecture 2 Aug 24 th, 2017 Slides from Dr. Shishir K Shah, Rajesh Rao and Frank (Qingzhong) Liu 1 Instructor TA Digital Image Processing COSC 6380/4393 Pranav Mantini
Digital Image Processing COSC 6380/4393 Lecture 2 Aug 24 th, 2017 Slides from Dr. Shishir K Shah, Rajesh Rao and Frank (Qingzhong) Liu 1 Instructor TA Digital Image Processing COSC 6380/4393 Pranav Mantini
Cameras. Outline. Pinhole camera. Camera trial #1. Pinhole camera Film camera Digital camera Video camera
 Outline Cameras Pinhole camera Film camera Digital camera Video camera Digital Visual Effects, Spring 2007 Yung-Yu Chuang 2007/3/6 with slides by Fredo Durand, Brian Curless, Steve Seitz and Alexei Efros
Outline Cameras Pinhole camera Film camera Digital camera Video camera Digital Visual Effects, Spring 2007 Yung-Yu Chuang 2007/3/6 with slides by Fredo Durand, Brian Curless, Steve Seitz and Alexei Efros
CPSC 425: Computer Vision
 1 / 55 CPSC 425: Computer Vision Instructor: Fred Tung ftung@cs.ubc.ca Department of Computer Science University of British Columbia Lecture Notes 2015/2016 Term 2 2 / 55 Menu January 7, 2016 Topics: Image
1 / 55 CPSC 425: Computer Vision Instructor: Fred Tung ftung@cs.ubc.ca Department of Computer Science University of British Columbia Lecture Notes 2015/2016 Term 2 2 / 55 Menu January 7, 2016 Topics: Image
Image Formation and Capture
 Figure credits: B. Curless, E. Hecht, W.J. Smith, B.K.P. Horn, A. Theuwissen, and J. Malik Image Formation and Capture COS 429: Computer Vision Image Formation and Capture Real world Optics Sensor Devices
Figure credits: B. Curless, E. Hecht, W.J. Smith, B.K.P. Horn, A. Theuwissen, and J. Malik Image Formation and Capture COS 429: Computer Vision Image Formation and Capture Real world Optics Sensor Devices
Basic principles of photography. David Capel 346B IST
 Basic principles of photography David Capel 346B IST Latin Camera Obscura = Dark Room Light passing through a small hole produces an inverted image on the opposite wall Safely observing the solar eclipse
Basic principles of photography David Capel 346B IST Latin Camera Obscura = Dark Room Light passing through a small hole produces an inverted image on the opposite wall Safely observing the solar eclipse
Digital Image Processing COSC 6380/4393
 Digital Image Processing COSC 6380/4393 Lecture 2 Aug 23 rd, 2018 Slides from Dr. Shishir K Shah, Rajesh Rao and Frank (Qingzhong) Liu 1 Instructor Digital Image Processing COSC 6380/4393 Pranav Mantini
Digital Image Processing COSC 6380/4393 Lecture 2 Aug 23 rd, 2018 Slides from Dr. Shishir K Shah, Rajesh Rao and Frank (Qingzhong) Liu 1 Instructor Digital Image Processing COSC 6380/4393 Pranav Mantini
3D Viewing. Introduction to Computer Graphics Torsten Möller / Manfred Klaffenböck. Machiraju/Zhang/Möller
 3D Viewing Introduction to Computer Graphics Torsten Möller / Manfred Klaffenböck Machiraju/Zhang/Möller Reading Chapter 5 of Angel Chapter 13 of Hughes, van Dam, Chapter 7 of Shirley+Marschner Machiraju/Zhang/Möller
3D Viewing Introduction to Computer Graphics Torsten Möller / Manfred Klaffenböck Machiraju/Zhang/Möller Reading Chapter 5 of Angel Chapter 13 of Hughes, van Dam, Chapter 7 of Shirley+Marschner Machiraju/Zhang/Möller
CS559: Computer Graphics. Lecture 2: Image Formation in Eyes and Cameras Li Zhang Spring 2008
 CS559: Computer Graphics Lecture 2: Image Formation in Eyes and Cameras Li Zhang Spring 2008 Today Eyes Cameras Light Why can we see? Visible Light and Beyond Infrared, e.g. radio wave longer wavelength
CS559: Computer Graphics Lecture 2: Image Formation in Eyes and Cameras Li Zhang Spring 2008 Today Eyes Cameras Light Why can we see? Visible Light and Beyond Infrared, e.g. radio wave longer wavelength
TSBB09 Image Sensors 2018-HT2. Image Formation Part 1
 TSBB09 Image Sensors 2018-HT2 Image Formation Part 1 Basic physics Electromagnetic radiation consists of electromagnetic waves With energy That propagate through space The waves consist of transversal
TSBB09 Image Sensors 2018-HT2 Image Formation Part 1 Basic physics Electromagnetic radiation consists of electromagnetic waves With energy That propagate through space The waves consist of transversal
Cameras. Shrinking the aperture. Camera trial #1. Pinhole camera. Digital Visual Effects Yung-Yu Chuang. Put a piece of film in front of an object.
 Camera trial #1 Cameras Digital Visual Effects Yung-Yu Chuang scene film with slides by Fredo Durand, Brian Curless, Steve Seitz and Alexei Efros Put a piece of film in front of an object. Pinhole camera
Camera trial #1 Cameras Digital Visual Effects Yung-Yu Chuang scene film with slides by Fredo Durand, Brian Curless, Steve Seitz and Alexei Efros Put a piece of film in front of an object. Pinhole camera
Image Formation III Chapter 1 (Forsyth&Ponce) Cameras Lenses & Sensors
 Cameras Lenses & Sensors") Image Formation III Chapter 1 (Forsyth&Ponce) Cameras Lenses & Sensors Guido Gerig CS-GY 6643, Spring 2017 (slides modified from Marc Pollefeys, UNC Chapel Hill/ ETH Zurich, With content from Prof. Trevor
Image Formation III Chapter 1 (Forsyth&Ponce) Cameras Lenses & Sensors Guido Gerig CS-GY 6643, Spring 2017 (slides modified from Marc Pollefeys, UNC Chapel Hill/ ETH Zurich, With content from Prof. Trevor
Computer Vision. Thursday, August 30
 Computer Vision Thursday, August 30 1 Today Course overview Requirements, logistics Image formation 2 Introductions Instructor: Prof. Kristen Grauman grauman @ cs TAY 4.118, Thurs 2-4 pm TA: Sudheendra
Computer Vision Thursday, August 30 1 Today Course overview Requirements, logistics Image formation 2 Introductions Instructor: Prof. Kristen Grauman grauman @ cs TAY 4.118, Thurs 2-4 pm TA: Sudheendra
Lecture 8 Camera Models
 Lecture 8 Caera Models Professor Silvio Savarese Coputational Vision and Geoetr Lab Silvio Savarese Lecture 8-5-Oct-4 Lecture 8 Caera Models Pinhole caeras Caeras & lenses The geoetr of pinhole caeras
Lecture 8 Caera Models Professor Silvio Savarese Coputational Vision and Geoetr Lab Silvio Savarese Lecture 8-5-Oct-4 Lecture 8 Caera Models Pinhole caeras Caeras & lenses The geoetr of pinhole caeras
Computational Photography and Video. Prof. Marc Pollefeys
 Computational Photography and Video Prof. Marc Pollefeys Today s schedule Introduction of Computational Photography Course facts Syllabus Digital Photography What is computational photography Convergence
Computational Photography and Video Prof. Marc Pollefeys Today s schedule Introduction of Computational Photography Course facts Syllabus Digital Photography What is computational photography Convergence
Fundamental Paraxial Equation for Thin Lenses
 THIN LENSES Fundamental Paraxial Equation for Thin Lenses A thin lens is one for which thickness is "negligibly" small and may be ignored. Thin lenses are the most important optical entity in ophthalmic
THIN LENSES Fundamental Paraxial Equation for Thin Lenses A thin lens is one for which thickness is "negligibly" small and may be ignored. Thin lenses are the most important optical entity in ophthalmic
Lecture 7: Camera Models
 Lecture 7: Camera Models Professor Fei- Fei Li Stanford Vision Lab Lecture 7 -! 1 What we will learn toda? Pinhole cameras Cameras & lenses The geometr of pinhole cameras Reading: [FP] Chapters 1 3 [HZ]
Lecture 7: Camera Models Professor Fei- Fei Li Stanford Vision Lab Lecture 7 -! 1 What we will learn toda? Pinhole cameras Cameras & lenses The geometr of pinhole cameras Reading: [FP] Chapters 1 3 [HZ]
Cameras, lenses, and sensors
 Cameras, lenses, and sensors Reading: Chapter 1, Forsyth & Ponce Optional: Section 2.1, 2.3, Horn. 6.801/6.866 Profs. Bill Freeman and Trevor Darrell Sept. 10, 2002 Today s lecture How many people would
Cameras, lenses, and sensors Reading: Chapter 1, Forsyth & Ponce Optional: Section 2.1, 2.3, Horn. 6.801/6.866 Profs. Bill Freeman and Trevor Darrell Sept. 10, 2002 Today s lecture How many people would
Lenses. Overview. Terminology. The pinhole camera. Pinhole camera Lenses Principles of operation Limitations
 Overview Pinhole camera Principles of operation Limitations 1 Terminology The pinhole camera The first camera - camera obscura - known to Aristotle. In 3D, we can visualize the blur induced by the pinhole
Overview Pinhole camera Principles of operation Limitations 1 Terminology The pinhole camera The first camera - camera obscura - known to Aristotle. In 3D, we can visualize the blur induced by the pinhole
Lecture 2 Camera Models
 Lecture 2 Camera Models Professor Silvio Savarese Computational Vision and Geometr Lab Silvio Savarese Lecture 2 - -Jan-8 Lecture 2 Camera Models Pinhole cameras Cameras lenses The geometr of pinhole cameras
Lecture 2 Camera Models Professor Silvio Savarese Computational Vision and Geometr Lab Silvio Savarese Lecture 2 - -Jan-8 Lecture 2 Camera Models Pinhole cameras Cameras lenses The geometr of pinhole cameras
Image Formation: Camera Model
 Image Formation: Camera Model Ruigang Yang COMP 684 Fall 2005, CS684-IBMR Outline Camera Models Pinhole Perspective Projection Affine Projection Camera with Lenses Digital Image Formation The Human Eye
Image Formation: Camera Model Ruigang Yang COMP 684 Fall 2005, CS684-IBMR Outline Camera Models Pinhole Perspective Projection Affine Projection Camera with Lenses Digital Image Formation The Human Eye
Introduction. Related Work
 Introduction Depth of field is a natural phenomenon when it comes to both sight and photography. The basic ray tracing camera model is insufficient at representing this essential visual element and will
Introduction Depth of field is a natural phenomenon when it comes to both sight and photography. The basic ray tracing camera model is insufficient at representing this essential visual element and will
Graphics and Interaction Perspective Geometry
 433-324 Graphics and Interaction Perspective Geometr Department of Computer Science and Software Engineering The Lecture outline Introduction to perspective geometr Perspective Geometr Centre of projection
433-324 Graphics and Interaction Perspective Geometr Department of Computer Science and Software Engineering The Lecture outline Introduction to perspective geometr Perspective Geometr Centre of projection
What will be on the midterm?
 What will be on the midterm? CS 178, Spring 2014 Marc Levoy Computer Science Department Stanford University General information 2 Monday, 7-9pm, Cubberly Auditorium (School of Edu) closed book, no notes
What will be on the midterm? CS 178, Spring 2014 Marc Levoy Computer Science Department Stanford University General information 2 Monday, 7-9pm, Cubberly Auditorium (School of Edu) closed book, no notes
Reading. Angel. Chapter 5. Optional
 Projections Reading Angel. Chapter 5 Optional David F. Rogers and J. Alan Adams, Mathematical Elements for Computer Graphics, Second edition, McGraw-Hill, New York, 1990, Chapter 3. The 3D synthetic camera
Projections Reading Angel. Chapter 5 Optional David F. Rogers and J. Alan Adams, Mathematical Elements for Computer Graphics, Second edition, McGraw-Hill, New York, 1990, Chapter 3. The 3D synthetic camera
Camera Simulation. References. Photography, B. London and J. Upton Optics in Photography, R. Kingslake The Camera, The Negative, The Print, A.
 Camera Simulation Effect Cause Field of view Film size, focal length Depth of field Aperture, focal length Exposure Film speed, aperture, shutter Motion blur Shutter References Photography, B. London and
Camera Simulation Effect Cause Field of view Film size, focal length Depth of field Aperture, focal length Exposure Film speed, aperture, shutter Motion blur Shutter References Photography, B. London and
Lens Principal and Nodal Points
 Lens Principal and Nodal Points Douglas A. Kerr, P.E. Issue 3 January 21, 2004 ABSTRACT In discussions of photographic lenses, we often hear of the importance of the principal points and nodal points of
Lens Principal and Nodal Points Douglas A. Kerr, P.E. Issue 3 January 21, 2004 ABSTRACT In discussions of photographic lenses, we often hear of the importance of the principal points and nodal points of
Lecture 22: Cameras & Lenses III. Computer Graphics and Imaging UC Berkeley CS184/284A, Spring 2017
 Lecture 22: Cameras & Lenses III Computer Graphics and Imaging UC Berkeley, Spring 2017 F-Number For Lens vs. Photo A lens s F-Number is the maximum for that lens E.g. 50 mm F/1.4 is a high-quality telephoto
Lecture 22: Cameras & Lenses III Computer Graphics and Imaging UC Berkeley, Spring 2017 F-Number For Lens vs. Photo A lens s F-Number is the maximum for that lens E.g. 50 mm F/1.4 is a high-quality telephoto
Physics 1230 Homework 8 Due Friday June 24, 2016
 At this point, you know lots about mirrors and lenses and can predict how they interact with light from objects to form images for observers. In the next part of the course, we consider applications of
At this point, you know lots about mirrors and lenses and can predict how they interact with light from objects to form images for observers. In the next part of the course, we consider applications of
CS354 Computer Graphics Viewing and Projections
 Slide Credit: Donald S. Fussell CS354 Computer Graphics Viewing and Projections Qixing Huang February 19th 2018 Eye Coordinates (not NDC) Planar Geometric Projections Standard projections project onto
Slide Credit: Donald S. Fussell CS354 Computer Graphics Viewing and Projections Qixing Huang February 19th 2018 Eye Coordinates (not NDC) Planar Geometric Projections Standard projections project onto
CSE 527: Introduction to Computer Vision
 CSE 527: Introduction to Computer Vision Week 2 - Class 2: Vision, Physics, Cameras September 7th, 2017 Today Physics Human Vision Eye Brain Perspective Projection Camera Models Image Formation Digital
CSE 527: Introduction to Computer Vision Week 2 - Class 2: Vision, Physics, Cameras September 7th, 2017 Today Physics Human Vision Eye Brain Perspective Projection Camera Models Image Formation Digital
Image stitching. Image stitching. Video summarization. Applications of image stitching. Stitching = alignment + blending. geometrical registration
 Image stitching Stitching = alignment + blending Image stitching geometrical registration photometric registration Digital Visual Effects, Spring 2006 Yung-Yu Chuang 2005/3/22 with slides by Richard Szeliski,
Image stitching Stitching = alignment + blending Image stitching geometrical registration photometric registration Digital Visual Effects, Spring 2006 Yung-Yu Chuang 2005/3/22 with slides by Richard Szeliski,
Chapter 25 Optical Instruments
 Chapter 25 Optical Instruments Units of Chapter 25 Cameras, Film, and Digital The Human Eye; Corrective Lenses Magnifying Glass Telescopes Compound Microscope Aberrations of Lenses and Mirrors Limits of
Chapter 25 Optical Instruments Units of Chapter 25 Cameras, Film, and Digital The Human Eye; Corrective Lenses Magnifying Glass Telescopes Compound Microscope Aberrations of Lenses and Mirrors Limits of
Dr F. Cuzzolin 1. September 29, 2015
 P00407 Principles of Computer Vision 1 1 Department of Computing and Communication Technologies Oxford Brookes University, UK September 29, 2015 September 29, 2015 1 / 73 Outline of the Lecture 1 2 Basics
P00407 Principles of Computer Vision 1 1 Department of Computing and Communication Technologies Oxford Brookes University, UK September 29, 2015 September 29, 2015 1 / 73 Outline of the Lecture 1 2 Basics
Adding Realistic Camera Effects to the Computer Graphics Camera Model
 Adding Realistic Camera Effects to the Computer Graphics Camera Model Ryan Baltazar May 4, 2012 1 Introduction The camera model traditionally used in computer graphics is based on the camera obscura or
Adding Realistic Camera Effects to the Computer Graphics Camera Model Ryan Baltazar May 4, 2012 1 Introduction The camera model traditionally used in computer graphics is based on the camera obscura or
Cameras, lenses and sensors
 Cameras, lenses and sensors Marc Pollefeys COMP 256 Cameras, lenses and sensors Camera Models Pinhole Perspective Projection Affine Projection Camera with Lenses Sensing The Human Eye Reading: Chapter.
Cameras, lenses and sensors Marc Pollefeys COMP 256 Cameras, lenses and sensors Camera Models Pinhole Perspective Projection Affine Projection Camera with Lenses Sensing The Human Eye Reading: Chapter.
Complete the diagram to show what happens to the rays. ... (1) What word can be used to describe this type of lens? ... (1)
 What word can be used to describe this type of lens? ... (1)") Q1. (a) The diagram shows two parallel rays of light, a lens and its axis. Complete the diagram to show what happens to the rays. (2) Name the point where the rays come together. (iii) What word can be
Q1. (a) The diagram shows two parallel rays of light, a lens and its axis. Complete the diagram to show what happens to the rays. (2) Name the point where the rays come together. (iii) What word can be
Homogeneous Representation Representation of points & vectors. Properties. Homogeneous Transformations
 From Last Class Homogeneous Transformations Combines Rotation + Translation into one single matri multiplication Composition of Homogeneous Transformations Homogeneous Representation Representation of
From Last Class Homogeneous Transformations Combines Rotation + Translation into one single matri multiplication Composition of Homogeneous Transformations Homogeneous Representation Representation of
Graphic Communications
 Graphic Communications Lecture 8: Projections Assoc. Prof.Dr. Cengizhan İpbüker İTÜ-SUNY 2004-2005 2005 Fall ipbuker_graph06 Projections The projections used to display 3D objects in 2D are called Planar
Graphic Communications Lecture 8: Projections Assoc. Prof.Dr. Cengizhan İpbüker İTÜ-SUNY 2004-2005 2005 Fall ipbuker_graph06 Projections The projections used to display 3D objects in 2D are called Planar
Section 8. Objectives
 8-1 Section 8 Objectives Objectives Simple and Petval Objectives are lens element combinations used to image (usually) distant objects. To classify the objective, separated groups of lens elements are
8-1 Section 8 Objectives Objectives Simple and Petval Objectives are lens element combinations used to image (usually) distant objects. To classify the objective, separated groups of lens elements are
Laboratory experiment aberrations
 Laboratory experiment aberrations Obligatory laboratory experiment on course in Optical design, SK2330/SK3330, KTH. Date Name Pass Objective This laboratory experiment is intended to demonstrate the most
Laboratory experiment aberrations Obligatory laboratory experiment on course in Optical design, SK2330/SK3330, KTH. Date Name Pass Objective This laboratory experiment is intended to demonstrate the most
6.A44 Computational Photography
 Add date: Friday 6.A44 Computational Photography Depth of Field Frédo Durand We allow for some tolerance What happens when we close the aperture by two stop? Aperture diameter is divided by two is doubled
Add date: Friday 6.A44 Computational Photography Depth of Field Frédo Durand We allow for some tolerance What happens when we close the aperture by two stop? Aperture diameter is divided by two is doubled
ECEG105/ECEU646 Optics for Engineers Course Notes Part 4: Apertures, Aberrations Prof. Charles A. DiMarzio Northeastern University Fall 2008
 ECEG105/ECEU646 Optics for Engineers Course Notes Part 4: Apertures, Aberrations Prof. Charles A. DiMarzio Northeastern University Fall 2008 July 2003+ Chuck DiMarzio, Northeastern University 11270-04-1
ECEG105/ECEU646 Optics for Engineers Course Notes Part 4: Apertures, Aberrations Prof. Charles A. DiMarzio Northeastern University Fall 2008 July 2003+ Chuck DiMarzio, Northeastern University 11270-04-1
CS 443: Imaging and Multimedia Cameras and Lenses
 CS 443: Imaging and Multimedia Cameras and Lenses Spring 2008 Ahmed Elgammal Dept of Computer Science Rutgers University Outlines Cameras and lenses! 1 They are formed by the projection of 3D objects.
CS 443: Imaging and Multimedia Cameras and Lenses Spring 2008 Ahmed Elgammal Dept of Computer Science Rutgers University Outlines Cameras and lenses! 1 They are formed by the projection of 3D objects.
PHY 1160C Homework Chapter 26: Optical Instruments Ch 26: 2, 3, 5, 9, 13, 15, 20, 25, 27
 PHY 60C Homework Chapter 26: Optical Instruments Ch 26: 2, 3, 5, 9, 3, 5, 20, 25, 27 26.2 A pin-hole camera is used to take a photograph of a student who is.8 m tall. The student stands 2.7 m in front
PHY 60C Homework Chapter 26: Optical Instruments Ch 26: 2, 3, 5, 9, 3, 5, 20, 25, 27 26.2 A pin-hole camera is used to take a photograph of a student who is.8 m tall. The student stands 2.7 m in front
Lens Openings & Shutter Speeds
 Illustrations courtesy Life Magazine Encyclopedia of Photography Lens Openings & Shutter Speeds Controlling Exposure & the Rendering of Space and Time Equal Lens Openings/ Double Exposure Time Here is
Illustrations courtesy Life Magazine Encyclopedia of Photography Lens Openings & Shutter Speeds Controlling Exposure & the Rendering of Space and Time Equal Lens Openings/ Double Exposure Time Here is
Aperture & ƒ/stop Worksheet
 Tools and Program Needed: Digital C. Computer USB Drive Bridge PhotoShop Name: Manipulating Depth-of-Field Aperture & stop Worksheet The aperture setting (AV on the dial) is a setting to control the amount
Tools and Program Needed: Digital C. Computer USB Drive Bridge PhotoShop Name: Manipulating Depth-of-Field Aperture & stop Worksheet The aperture setting (AV on the dial) is a setting to control the amount
To start there are three key properties that you need to understand: ISO (sensitivity)
") Some Photo Fundamentals Photography is at once relatively simple and technically confusing at the same time. The camera is basically a black box with a hole in its side camera comes from camera obscura,
Some Photo Fundamentals Photography is at once relatively simple and technically confusing at the same time. The camera is basically a black box with a hole in its side camera comes from camera obscura,
Transmission electron Microscopy
 Transmission electron Microscopy Image formation of a concave lens in geometrical optics Some basic features of the transmission electron microscope (TEM) can be understood from by analogy with the operation
Transmission electron Microscopy Image formation of a concave lens in geometrical optics Some basic features of the transmission electron microscope (TEM) can be understood from by analogy with the operation
Overview. Image formation - 1
 Overview perspective imaging Image formation Refraction of light Thin-lens equation Optical power and accommodation Image irradiance and scene radiance Digital images Introduction to MATLAB Image formation
Overview perspective imaging Image formation Refraction of light Thin-lens equation Optical power and accommodation Image irradiance and scene radiance Digital images Introduction to MATLAB Image formation
An Introduction to. Photographic Exposure: Aperture, ISO and Shutter Speed
 An Introduction to Photographic Exposure: Aperture, ISO and Shutter Speed EXPOSURE Exposure relates to light and how it enters and interacts with the camera. Too much light Too little light EXPOSURE The
An Introduction to Photographic Exposure: Aperture, ISO and Shutter Speed EXPOSURE Exposure relates to light and how it enters and interacts with the camera. Too much light Too little light EXPOSURE The
( ) Deriving the Lens Transmittance Function. Thin lens transmission is given by a phase with unit magnitude.
 Deriving the Lens Transmittance Function. Thin lens transmission is given by a phase with unit magnitude.") Deriving the Lens Transmittance Function Thin lens transmission is given by a phase with unit magnitude. t(x, y) = exp[ jk o ]exp[ jk(n 1) (x, y) ] Find the thickness function for left half of the lens
Deriving the Lens Transmittance Function Thin lens transmission is given by a phase with unit magnitude. t(x, y) = exp[ jk o ]exp[ jk(n 1) (x, y) ] Find the thickness function for left half of the lens
Reading. Projections. The 3D synthetic camera model. Imaging with the synthetic camera. Angel. Chapter 5. Optional
 Reading Angel. Chapter 5 Optional Projections David F. Rogers and J. Alan Adams, Mathematical Elements for Computer Graphics, Second edition, McGraw-Hill, New York, 1990, Chapter 3. The 3D snthetic camera
Reading Angel. Chapter 5 Optional Projections David F. Rogers and J. Alan Adams, Mathematical Elements for Computer Graphics, Second edition, McGraw-Hill, New York, 1990, Chapter 3. The 3D snthetic camera
Lab 2 Geometrical Optics
 Lab 2 Geometrical Optics March 22, 202 This material will span much of 2 lab periods. Get through section 5.4 and time permitting, 5.5 in the first lab. Basic Equations Lensmaker s Equation for a thin
Lab 2 Geometrical Optics March 22, 202 This material will span much of 2 lab periods. Get through section 5.4 and time permitting, 5.5 in the first lab. Basic Equations Lensmaker s Equation for a thin
CAMERA BASICS. Stops of light
 CAMERA BASICS Stops of light A stop of light isn t a quantifiable measurement it s a relative measurement. A stop of light is defined as a doubling or halving of any quantity of light. The word stop is
CAMERA BASICS Stops of light A stop of light isn t a quantifiable measurement it s a relative measurement. A stop of light is defined as a doubling or halving of any quantity of light. The word stop is
Name: Date: Math in Special Effects: Try Other Challenges. Student Handout
 Name: Date: Math in Special Effects: Try Other Challenges When filming special effects, a high-speed photographer needs to control the duration and impact of light by adjusting a number of settings, including
Name: Date: Math in Special Effects: Try Other Challenges When filming special effects, a high-speed photographer needs to control the duration and impact of light by adjusting a number of settings, including
Chapter 18 Optical Elements
 Chapter 18 Optical Elements GOALS When you have mastered the content of this chapter, you will be able to achieve the following goals: Definitions Define each of the following terms and use it in an operational
Chapter 18 Optical Elements GOALS When you have mastered the content of this chapter, you will be able to achieve the following goals: Definitions Define each of the following terms and use it in an operational
Topic 6 - Optics Depth of Field and Circle Of Confusion
 Topic 6 - Optics Depth of Field and Circle Of Confusion Learning Outcomes In this lesson, we will learn all about depth of field and a concept known as the Circle of Confusion. By the end of this lesson,
Topic 6 - Optics Depth of Field and Circle Of Confusion Learning Outcomes In this lesson, we will learn all about depth of field and a concept known as the Circle of Confusion. By the end of this lesson,
Prof. Feng Liu. Spring /05/2017
 Prof. Feng Liu Spring 2017 http://www.cs.pdx.edu/~fliu/courses/cs510/ 04/05/2017 Last Time Course overview Admin. Info Computational Photography 2 Today Digital Camera History of Camera Controlling Camera
Prof. Feng Liu Spring 2017 http://www.cs.pdx.edu/~fliu/courses/cs510/ 04/05/2017 Last Time Course overview Admin. Info Computational Photography 2 Today Digital Camera History of Camera Controlling Camera