CSE 527: Introduction to Computer Vision
|
|
|
- Abraham Barrett
- 5 years ago
- Views:
Transcription
1 CSE 527: Introduction to Computer Vision Week 2 - Class 2: Vision, Physics, Cameras September 7th, 2017
2 Today Physics Human Vision Eye Brain Perspective Projection Camera Models Image Formation Digital Cameras

3 Very Briefly: Physics of Light

4 (Visible) Light EM Radiation


5 Why this exact band of the EM spectrum?

 in different ways, which also depends")
6 Photons A particle? A wave? Both? Have a frequency of oscillation Travel as the speed of light (very fast) Usually in a straight line Interact with matter (atoms) in different ways, which also depends on their frequency Oscill8 bro!
7 Light-Matter Interaction Light ( photons ) have a few choices when hitting a material: Transmission: Reflection: Absorption: go through it go back get stuck in it Other things may happen Refraction: bend through it Diffusion/Scatter: go in many ways Subsurface: hit things inside and more We re mostly interested in absorbed, reflected and refracted light.


8 What is color? Reflected light Some light is absorbed by the material, and some reflected. We see the reflected light. Materials have different properties: which frequencies are absorbed which frequencies are reflected which frequencies are transmitted...
9 The Bidirectional Reflectance Distribution Function An approximate numerical representation of the material light interaction properties Light direction wavelength Diffuse: Specular: Phong model : (introduce Ambient Lighting)





10 Lambertian Surfaces Ideal surfaces: Diffuse reflection occurs in a known pattern (Lambert s cosine rule) We often make this assumption in Vision applications. Reflect!

11 Human Vision And Visual Processing
 We know that we can extract so much information from flat (stereo) images -> Inspired the creation")
12 Why do we care about human vision? Bionics, Bio-inspired Engineering, Biomimicry,... The human visual sense is very central (large swaths of the brain devoted to visual processing) We know that we can extract so much information from flat (stereo) images -> Inspired the creation of cameras -> Inspires (even today) computational methods for visual processing And there is still much to learn... Da Vinci s flying machine, inspired by bird wings
 on a sensitive substrate (retina) But much more complicated Aperture Lens Film / CCD")
13 Human Eye Parts Is very much like a camera: - Light shines through a hole (pupil, iris) and focused (cornea, lens) on a sensitive substrate (retina) But much more complicated Aperture Lens Film / CCD

14 Retina Layers, Rods and Cones
15 Rods and Cones Humans may be considered to be Tetrachromats: able to see 4 colors. However mostly cones contribute to color vision, making us Trichromats.
16 Color Perception

17 This Tuesday (9/5/17). Human vision is affected by proteins too!



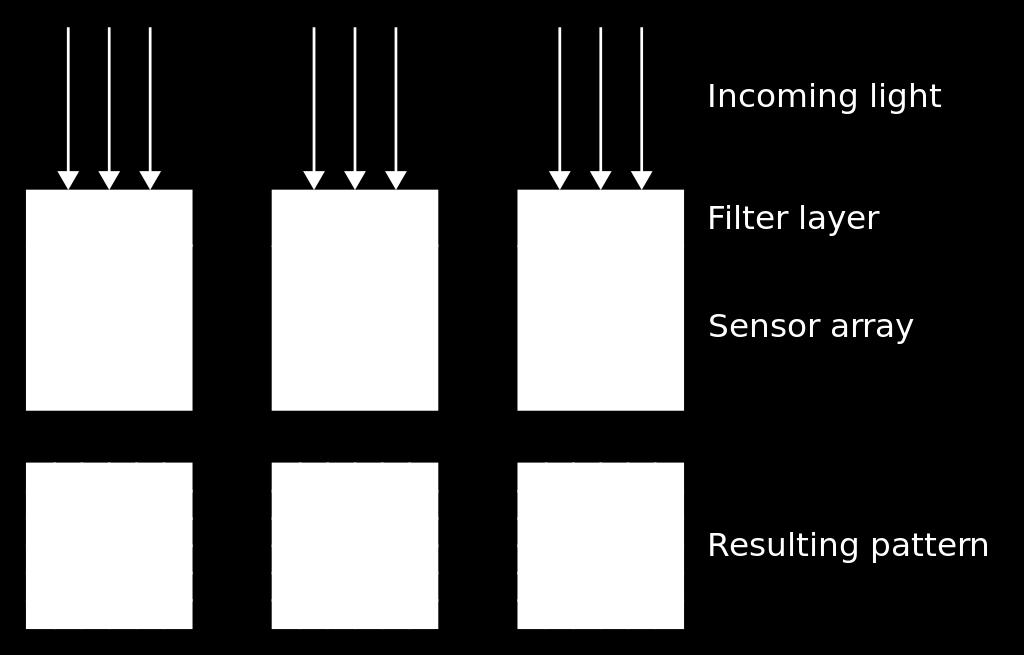

18 Retina Cone Mosaic Digital Sensor Grid

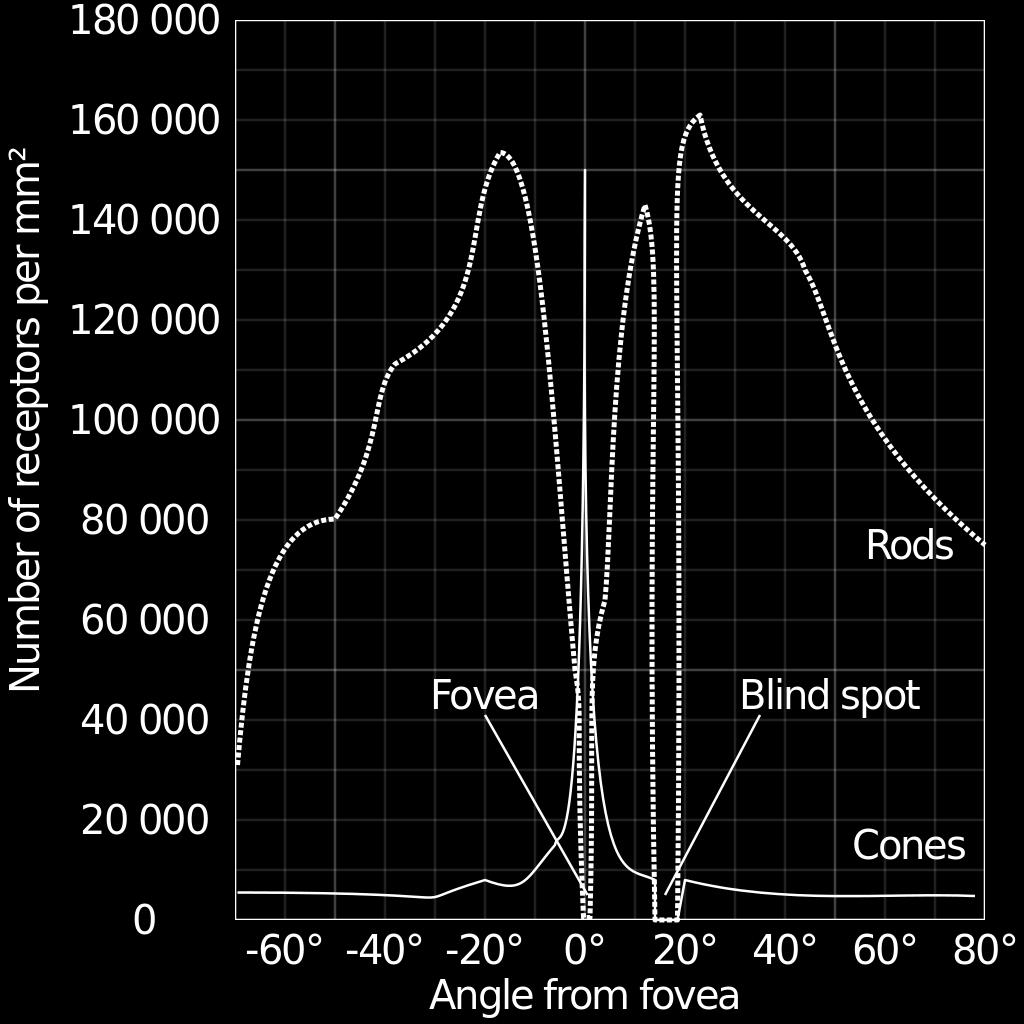
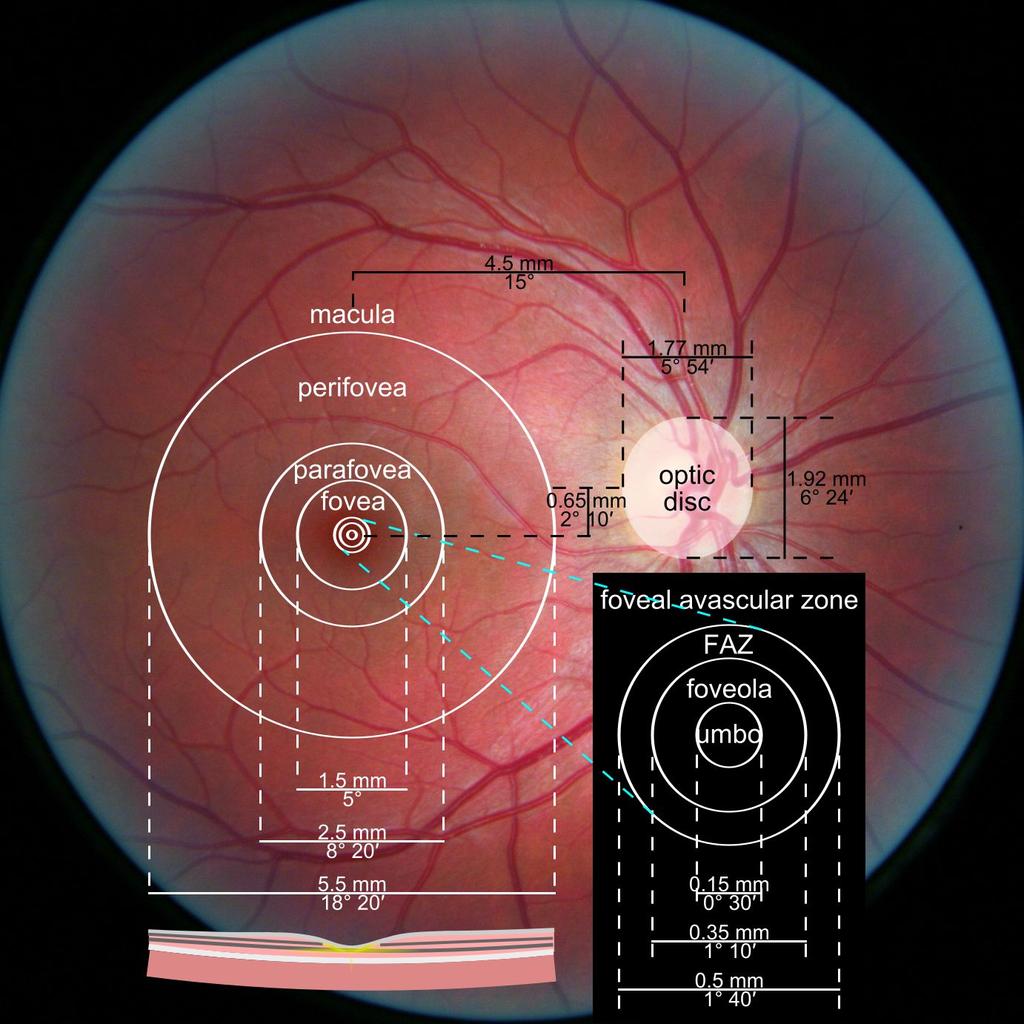
19 Retina Cell Arrangement, Fovea
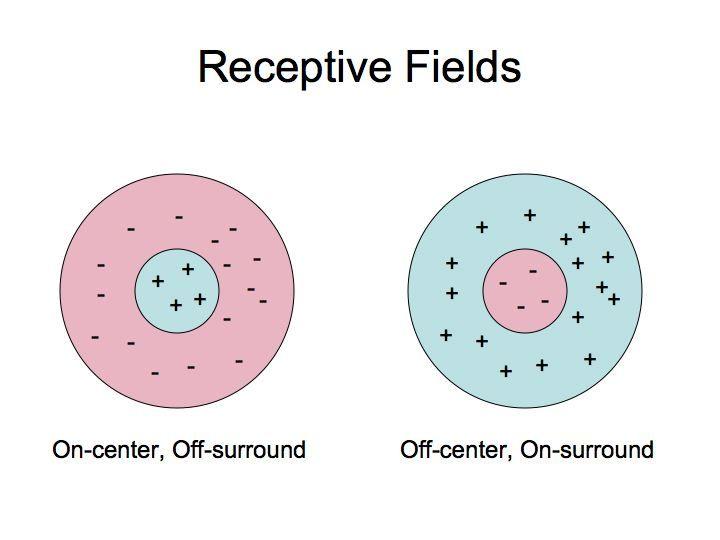
20 Lateral Inhibition Receptor AND Gates
21 Lateral Inhibition

22 Visual Processing System Hierarchy
23 Brightness Constancy Principle
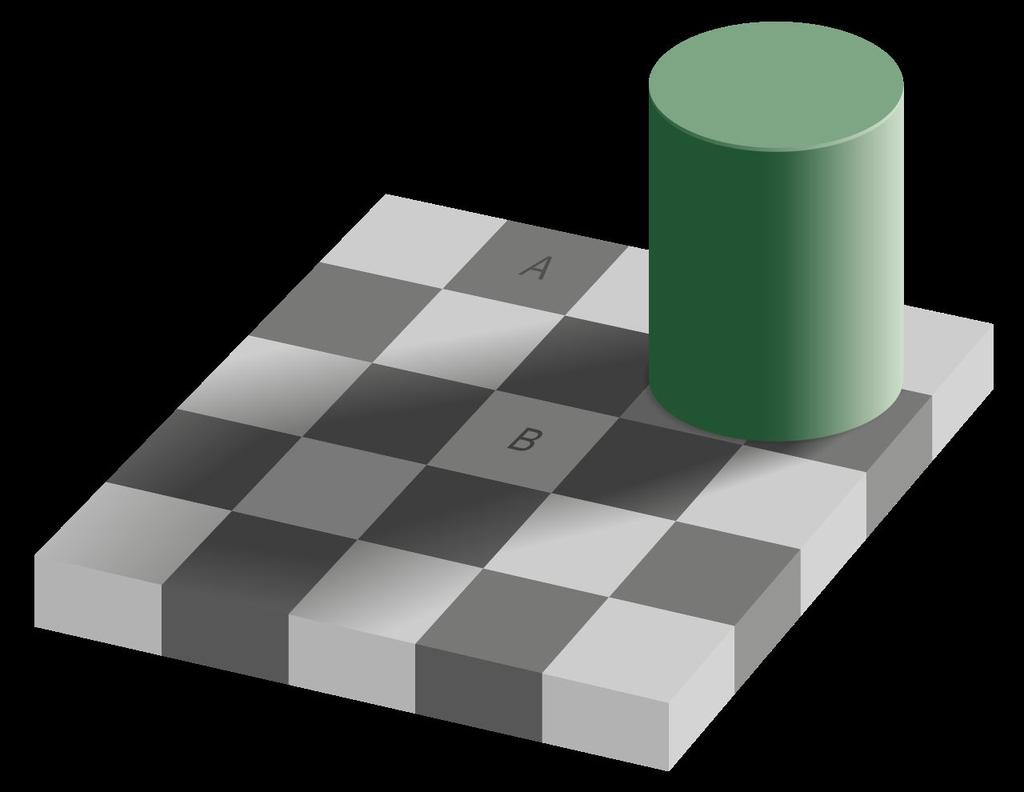
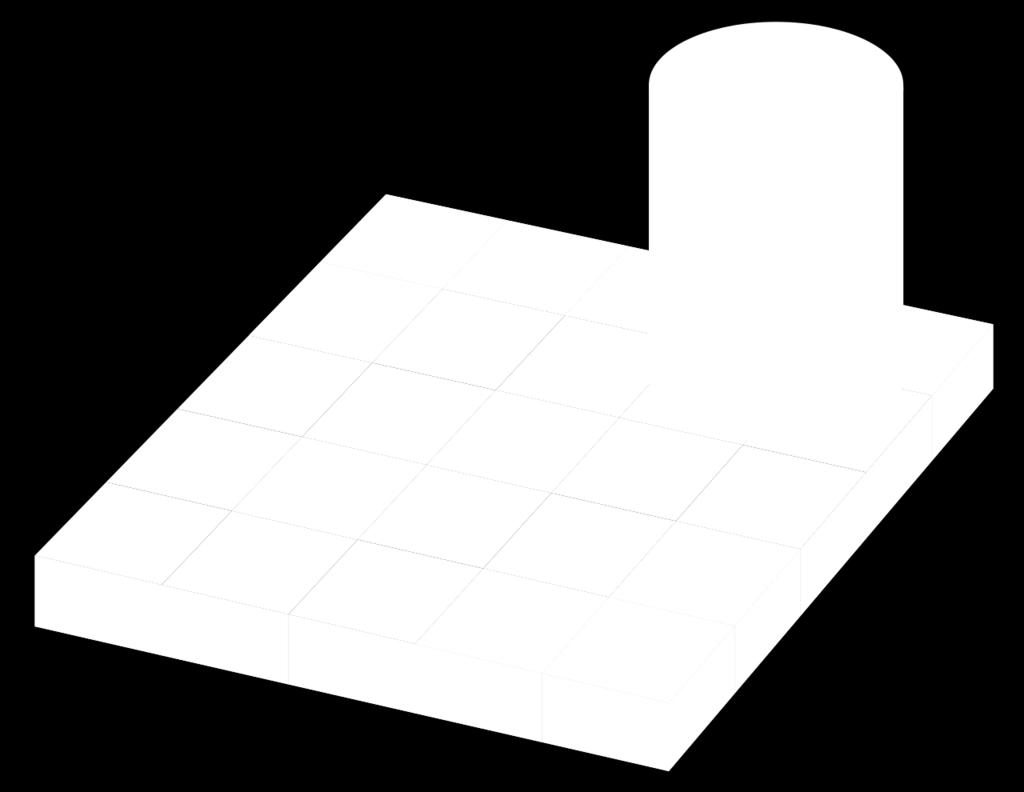
24 Brightness Constancy

25 Size Constancy

26 Pinhole Camera And Perspective Projection Perspectograph ca. 1600


27 Pinhole Camera C est moi! Kepler, Descartes, ca. 1600


28 Camera Obscura Earliest evidence: ~400 BCE Aristotle wrote about this! Later advancement (17th century): - Lenses - Drawing aid - Projectors (magic lantern) Yep.
29 Pinhole Camera Model
30 Normalized Camera
31 Focal Length Matters We ll get back to this shortly...

")
32 Perspective in Early Art Gentile di Fabriano (1423) Masolino (1425)


33 It s All a Matter of Perspective
 to determine size and distance.")
34 Vanishing Points Parallel lines in the scene converge in a vanishing point in the image. Vanishing points and lines are cues to the visual system (e.g. in size constancy) to determine size and distance.


35 More Than a Single Vanishing Point One Point Two Points Three Points

36 Why Vanishing Points? Can be used to reconstruct the geometry in the scene, from a single image. [Wilczkowiak 99]
37 Back to Projection Intrinsics Matrix Our goal: Go from world coordinates (in mm) to image coordinates (in pixels). We need to introduce a scaling factor from mm to pixel. This depends on the physical focal length and the size of a single pixel on the sensor in mm. W is sensor size (in mm) and O is field of view. Also, let s shift everything so the image is centered about the camera optical axis:
38 Homogeneous Coordinates Our projection equation is nonlinear: (It has division in it) Let s take a different representation for the cartesian 2D and 3D points: Now our projection equation is linear: To go back to cartesian we divide by the added component.



39 Homogeneous Coordinates Why are they so useful? - Adding translation is trivial and turns our transformation to a linear matrix operation. - In fact, some transformations can only work with homogeneous coordinates. - Can be used to represent points at infinity, like vanishing points (by setting ) or directions. - They can do other tricks like find line intersections easily, or fetch a ball.
40 Camera Extrinsic Parameters So far we assumed the camera is at the origin But that s often not the case. rotation translation A more common notation:


41 Beyond Pinhole Radial Distortions Wholly nonlinear, but can be simple enough: Can be negated by de-warping the image.
42 Image Formation: Lenses
43 Do We Need a Lens? The eye has a lens, so... that s a good yes indicator. Lenses focus light, and allow us to image objects that are far away (or very close). The pinhole model still holds!
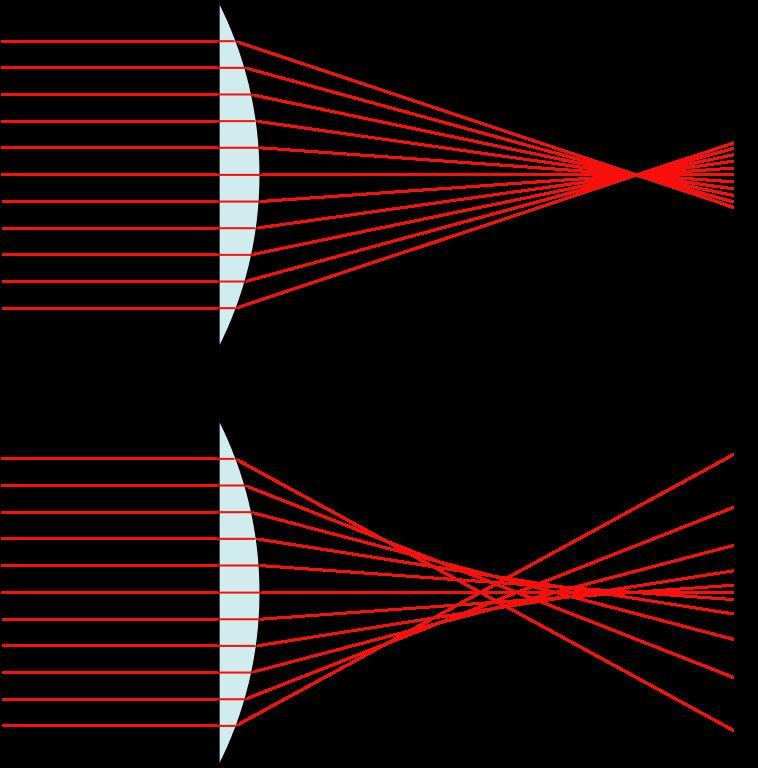
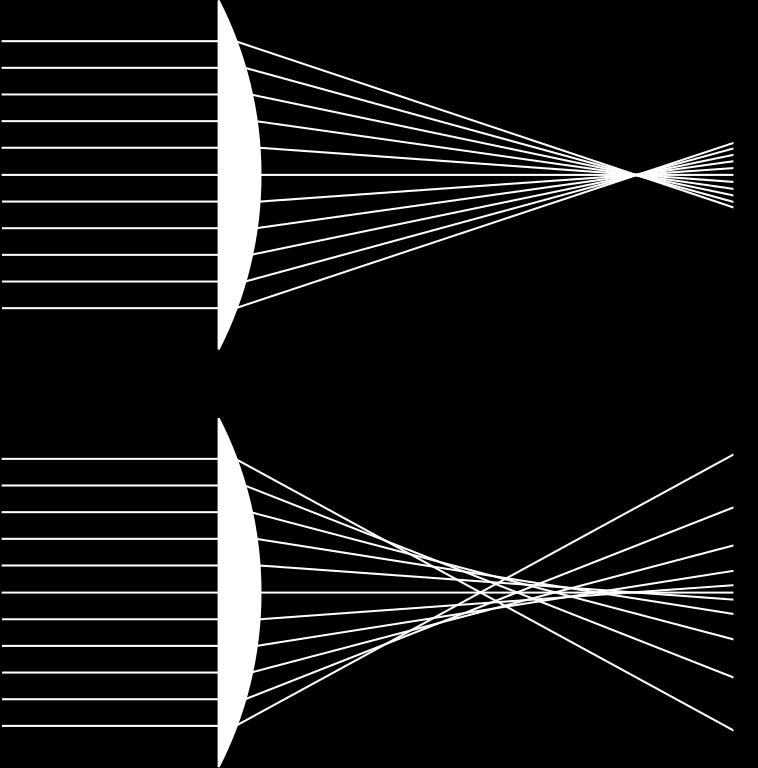
44 Thin Lens Circle of confusion (blur), relates to Depth of Field

45 Focal Length Field Of View


46 Lenses Add Distortions Chromatic Aberration Spherical Aberration Vignetting
47 Wrap Up
Unit 1: Image Formation
 Unit 1: Image Formation 1. Geometry 2. Optics 3. Photometry 4. Sensor Readings Szeliski 2.1-2.3 & 6.3.5 1 Physical parameters of image formation Geometric Type of projection Camera pose Optical Sensor
Unit 1: Image Formation 1. Geometry 2. Optics 3. Photometry 4. Sensor Readings Szeliski 2.1-2.3 & 6.3.5 1 Physical parameters of image formation Geometric Type of projection Camera pose Optical Sensor
Overview. Pinhole camera model Projective geometry Vanishing points and lines Projection matrix Cameras with Lenses Color Digital image
 Camera & Color Overview Pinhole camera model Projective geometry Vanishing points and lines Projection matrix Cameras with Lenses Color Digital image Book: Hartley 6.1, Szeliski 2.1.5, 2.2, 2.3 The trip
Camera & Color Overview Pinhole camera model Projective geometry Vanishing points and lines Projection matrix Cameras with Lenses Color Digital image Book: Hartley 6.1, Szeliski 2.1.5, 2.2, 2.3 The trip
Cameras. CSE 455, Winter 2010 January 25, 2010
 Cameras CSE 455, Winter 2010 January 25, 2010 Announcements New Lecturer! Neel Joshi, Ph.D. Post-Doctoral Researcher Microsoft Research neel@cs Project 1b (seam carving) was due on Friday the 22 nd Project
Cameras CSE 455, Winter 2010 January 25, 2010 Announcements New Lecturer! Neel Joshi, Ph.D. Post-Doctoral Researcher Microsoft Research neel@cs Project 1b (seam carving) was due on Friday the 22 nd Project
Projection. Announcements. Müller-Lyer Illusion. Image formation. Readings Nalwa 2.1
 Announcements Mailing list (you should have received messages) Project 1 additional test sequences online Projection Readings Nalwa 2.1 Müller-Lyer Illusion Image formation object film by Pravin Bhat http://www.michaelbach.de/ot/sze_muelue/index.html
Announcements Mailing list (you should have received messages) Project 1 additional test sequences online Projection Readings Nalwa 2.1 Müller-Lyer Illusion Image formation object film by Pravin Bhat http://www.michaelbach.de/ot/sze_muelue/index.html
IMAGE FORMATION. Light source properties. Sensor characteristics Surface. Surface reflectance properties. Optics
 IMAGE FORMATION Light source properties Sensor characteristics Surface Exposure shape Optics Surface reflectance properties ANALOG IMAGES An image can be understood as a 2D light intensity function f(x,y)
IMAGE FORMATION Light source properties Sensor characteristics Surface Exposure shape Optics Surface reflectance properties ANALOG IMAGES An image can be understood as a 2D light intensity function f(x,y)
Computer Vision. The Pinhole Camera Model
 Computer Vision The Pinhole Camera Model Filippo Bergamasco (filippo.bergamasco@unive.it) http://www.dais.unive.it/~bergamasco DAIS, Ca Foscari University of Venice Academic year 2017/2018 Imaging device
Computer Vision The Pinhole Camera Model Filippo Bergamasco (filippo.bergamasco@unive.it) http://www.dais.unive.it/~bergamasco DAIS, Ca Foscari University of Venice Academic year 2017/2018 Imaging device
Dr F. Cuzzolin 1. September 29, 2015
 P00407 Principles of Computer Vision 1 1 Department of Computing and Communication Technologies Oxford Brookes University, UK September 29, 2015 September 29, 2015 1 / 73 Outline of the Lecture 1 2 Basics
P00407 Principles of Computer Vision 1 1 Department of Computing and Communication Technologies Oxford Brookes University, UK September 29, 2015 September 29, 2015 1 / 73 Outline of the Lecture 1 2 Basics
Projection. Readings. Szeliski 2.1. Wednesday, October 23, 13
 Projection Readings Szeliski 2.1 Projection Readings Szeliski 2.1 Müller-Lyer Illusion by Pravin Bhat Müller-Lyer Illusion by Pravin Bhat http://www.michaelbach.de/ot/sze_muelue/index.html Müller-Lyer
Projection Readings Szeliski 2.1 Projection Readings Szeliski 2.1 Müller-Lyer Illusion by Pravin Bhat Müller-Lyer Illusion by Pravin Bhat http://www.michaelbach.de/ot/sze_muelue/index.html Müller-Lyer
LENSES. INEL 6088 Computer Vision
 LENSES INEL 6088 Computer Vision Digital camera A digital camera replaces film with a sensor array Each cell in the array is a Charge Coupled Device light-sensitive diode that converts photons to electrons
LENSES INEL 6088 Computer Vision Digital camera A digital camera replaces film with a sensor array Each cell in the array is a Charge Coupled Device light-sensitive diode that converts photons to electrons
Projection. Projection. Image formation. Müller-Lyer Illusion. Readings. Readings. Let s design a camera. Szeliski 2.1. Szeliski 2.
 Projection Projection Readings Szeliski 2.1 Readings Szeliski 2.1 Müller-Lyer Illusion Image formation object film by Pravin Bhat http://www.michaelbach.de/ot/sze_muelue/index.html Let s design a camera
Projection Projection Readings Szeliski 2.1 Readings Szeliski 2.1 Müller-Lyer Illusion Image formation object film by Pravin Bhat http://www.michaelbach.de/ot/sze_muelue/index.html Let s design a camera
Image Formation and Capture
 Figure credits: B. Curless, E. Hecht, W.J. Smith, B.K.P. Horn, A. Theuwissen, and J. Malik Image Formation and Capture COS 429: Computer Vision Image Formation and Capture Real world Optics Sensor Devices
Figure credits: B. Curless, E. Hecht, W.J. Smith, B.K.P. Horn, A. Theuwissen, and J. Malik Image Formation and Capture COS 429: Computer Vision Image Formation and Capture Real world Optics Sensor Devices
CS6670: Computer Vision
 CS6670: Computer Vision Noah Snavely Lecture 5: Cameras and Projection Szeliski 2.1.3-2.1.6 Reading Announcements Project 1 assigned, see projects page: http://www.cs.cornell.edu/courses/cs6670/2011sp/projects/projects.html
CS6670: Computer Vision Noah Snavely Lecture 5: Cameras and Projection Szeliski 2.1.3-2.1.6 Reading Announcements Project 1 assigned, see projects page: http://www.cs.cornell.edu/courses/cs6670/2011sp/projects/projects.html
VC 14/15 TP2 Image Formation
 VC 14/15 TP2 Image Formation Mestrado em Ciência de Computadores Mestrado Integrado em Engenharia de Redes e Sistemas Informáticos Miguel Tavares Coimbra Outline Computer Vision? The Human Visual System
VC 14/15 TP2 Image Formation Mestrado em Ciência de Computadores Mestrado Integrado em Engenharia de Redes e Sistemas Informáticos Miguel Tavares Coimbra Outline Computer Vision? The Human Visual System
Building a Real Camera. Slides Credit: Svetlana Lazebnik
 Building a Real Camera Slides Credit: Svetlana Lazebnik Home-made pinhole camera Slide by A. Efros http://www.debevec.org/pinhole/ Shrinking the aperture Why not make the aperture as small as possible?
Building a Real Camera Slides Credit: Svetlana Lazebnik Home-made pinhole camera Slide by A. Efros http://www.debevec.org/pinhole/ Shrinking the aperture Why not make the aperture as small as possible?
Digital Image Processing COSC 6380/4393
 Digital Image Processing COSC 6380/4393 Lecture 2 Aug 24 th, 2017 Slides from Dr. Shishir K Shah, Rajesh Rao and Frank (Qingzhong) Liu 1 Instructor TA Digital Image Processing COSC 6380/4393 Pranav Mantini
Digital Image Processing COSC 6380/4393 Lecture 2 Aug 24 th, 2017 Slides from Dr. Shishir K Shah, Rajesh Rao and Frank (Qingzhong) Liu 1 Instructor TA Digital Image Processing COSC 6380/4393 Pranav Mantini
The Camera : Computational Photography Alexei Efros, CMU, Fall 2008
 The Camera 15-463: Computational Photography Alexei Efros, CMU, Fall 2008 How do we see the world? object film Let s design a camera Idea 1: put a piece of film in front of an object Do we get a reasonable
The Camera 15-463: Computational Photography Alexei Efros, CMU, Fall 2008 How do we see the world? object film Let s design a camera Idea 1: put a piece of film in front of an object Do we get a reasonable
VC 11/12 T2 Image Formation
 VC 11/12 T2 Image Formation Mestrado em Ciência de Computadores Mestrado Integrado em Engenharia de Redes e Sistemas Informáticos Miguel Tavares Coimbra Outline Computer Vision? The Human Visual System
VC 11/12 T2 Image Formation Mestrado em Ciência de Computadores Mestrado Integrado em Engenharia de Redes e Sistemas Informáticos Miguel Tavares Coimbra Outline Computer Vision? The Human Visual System
Vision 1. Physical Properties of Light. Overview of Topics. Light, Optics, & The Eye Chaudhuri, Chapter 8
 Vision 1 Light, Optics, & The Eye Chaudhuri, Chapter 8 1 1 Overview of Topics Physical Properties of Light Physical properties of light Interaction of light with objects Anatomy of the eye 2 3 Light A
Vision 1 Light, Optics, & The Eye Chaudhuri, Chapter 8 1 1 Overview of Topics Physical Properties of Light Physical properties of light Interaction of light with objects Anatomy of the eye 2 3 Light A
CS6670: Computer Vision
 CS6670: Computer Vision Noah Snavely Lecture 4a: Cameras Source: S. Lazebnik Reading Szeliski chapter 2.2.3, 2.3 Image formation Let s design a camera Idea 1: put a piece of film in front of an object
CS6670: Computer Vision Noah Snavely Lecture 4a: Cameras Source: S. Lazebnik Reading Szeliski chapter 2.2.3, 2.3 Image formation Let s design a camera Idea 1: put a piece of film in front of an object
VC 16/17 TP2 Image Formation
 VC 16/17 TP2 Image Formation Mestrado em Ciência de Computadores Mestrado Integrado em Engenharia de Redes e Sistemas Informáticos Hélder Filipe Pinto de Oliveira Outline Computer Vision? The Human Visual
VC 16/17 TP2 Image Formation Mestrado em Ciência de Computadores Mestrado Integrado em Engenharia de Redes e Sistemas Informáticos Hélder Filipe Pinto de Oliveira Outline Computer Vision? The Human Visual
Lecture 26. PHY 112: Light, Color and Vision. Finalities. Final: Thursday May 19, 2:15 to 4:45 pm. Prof. Clark McGrew Physics D 134
 PHY 112: Light, Color and Vision Lecture 26 Prof. Clark McGrew Physics D 134 Finalities Final: Thursday May 19, 2:15 to 4:45 pm ESS 079 (this room) Lecture 26 PHY 112 Lecture 1 Introductory Chapters Chapters
PHY 112: Light, Color and Vision Lecture 26 Prof. Clark McGrew Physics D 134 Finalities Final: Thursday May 19, 2:15 to 4:45 pm ESS 079 (this room) Lecture 26 PHY 112 Lecture 1 Introductory Chapters Chapters
Building a Real Camera
 Building a Real Camera Home-made pinhole camera Slide by A. Efros http://www.debevec.org/pinhole/ Shrinking the aperture Why not make the aperture as small as possible? Less light gets through Diffraction
Building a Real Camera Home-made pinhole camera Slide by A. Efros http://www.debevec.org/pinhole/ Shrinking the aperture Why not make the aperture as small as possible? Less light gets through Diffraction
Digital Image Processing COSC 6380/4393
 Digital Image Processing COSC 6380/4393 Lecture 2 Aug 23 rd, 2018 Slides from Dr. Shishir K Shah, Rajesh Rao and Frank (Qingzhong) Liu 1 Instructor Digital Image Processing COSC 6380/4393 Pranav Mantini
Digital Image Processing COSC 6380/4393 Lecture 2 Aug 23 rd, 2018 Slides from Dr. Shishir K Shah, Rajesh Rao and Frank (Qingzhong) Liu 1 Instructor Digital Image Processing COSC 6380/4393 Pranav Mantini
Visual Perception. Readings and References. Forming an image. Pinhole camera. Readings. Other References. CSE 457, Autumn 2004 Computer Graphics
 Readings and References Visual Perception CSE 457, Autumn Computer Graphics Readings Sections 1.4-1.5, Interactive Computer Graphics, Angel Other References Foundations of Vision, Brian Wandell, pp. 45-50
Readings and References Visual Perception CSE 457, Autumn Computer Graphics Readings Sections 1.4-1.5, Interactive Computer Graphics, Angel Other References Foundations of Vision, Brian Wandell, pp. 45-50
CS 443: Imaging and Multimedia Cameras and Lenses
 CS 443: Imaging and Multimedia Cameras and Lenses Spring 2008 Ahmed Elgammal Dept of Computer Science Rutgers University Outlines Cameras and lenses! 1 They are formed by the projection of 3D objects.
CS 443: Imaging and Multimedia Cameras and Lenses Spring 2008 Ahmed Elgammal Dept of Computer Science Rutgers University Outlines Cameras and lenses! 1 They are formed by the projection of 3D objects.
The Camera : Computational Photography Alexei Efros, CMU, Fall 2005
 The Camera 15-463: Computational Photography Alexei Efros, CMU, Fall 2005 How do we see the world? object film Let s design a camera Idea 1: put a piece of film in front of an object Do we get a reasonable
The Camera 15-463: Computational Photography Alexei Efros, CMU, Fall 2005 How do we see the world? object film Let s design a camera Idea 1: put a piece of film in front of an object Do we get a reasonable
Physics 1230: Light and Color. Guest Lecture, Jack again. Lecture 23: More about cameras
 Physics 1230: Light and Color Chuck Rogers, Charles.Rogers@colorado.edu Ryan Henley, Valyria McFarland, Peter Siegfried physicscourses.colorado.edu/phys1230 Guest Lecture, Jack again Lecture 23: More about
Physics 1230: Light and Color Chuck Rogers, Charles.Rogers@colorado.edu Ryan Henley, Valyria McFarland, Peter Siegfried physicscourses.colorado.edu/phys1230 Guest Lecture, Jack again Lecture 23: More about
CPSC 425: Computer Vision
 1 / 55 CPSC 425: Computer Vision Instructor: Fred Tung ftung@cs.ubc.ca Department of Computer Science University of British Columbia Lecture Notes 2015/2016 Term 2 2 / 55 Menu January 7, 2016 Topics: Image
1 / 55 CPSC 425: Computer Vision Instructor: Fred Tung ftung@cs.ubc.ca Department of Computer Science University of British Columbia Lecture Notes 2015/2016 Term 2 2 / 55 Menu January 7, 2016 Topics: Image
Two strategies for realistic rendering capture real world data synthesize from bottom up
 Recap from Wednesday Two strategies for realistic rendering capture real world data synthesize from bottom up Both have existed for 500 years. Both are successful. Attempts to take the best of both world
Recap from Wednesday Two strategies for realistic rendering capture real world data synthesize from bottom up Both have existed for 500 years. Both are successful. Attempts to take the best of both world
Announcements. Image Formation: Outline. The course. How Cameras Produce Images. Earliest Surviving Photograph. Image Formation and Cameras
 Announcements Image ormation and Cameras CSE 252A Lecture 3 Assignment 0: Getting Started with Matlab is posted to web page, due Tuesday, ctober 4. Reading: Szeliski, Chapter 2 ptional Chapters 1 & 2 of
Announcements Image ormation and Cameras CSE 252A Lecture 3 Assignment 0: Getting Started with Matlab is posted to web page, due Tuesday, ctober 4. Reading: Szeliski, Chapter 2 ptional Chapters 1 & 2 of
Chapter 36. Image Formation
 Chapter 36 Image Formation Image of Formation Images can result when light rays encounter flat or curved surfaces between two media. Images can be formed either by reflection or refraction due to these
Chapter 36 Image Formation Image of Formation Images can result when light rays encounter flat or curved surfaces between two media. Images can be formed either by reflection or refraction due to these
Instructional Resources/Materials: Light vocabulary cards printed (class set) Enough for each student (See card sort below)
 Enough for each student (See card sort below)") Grade Level/Course: Grade 7 Life Science Lesson/Unit Plan Name: Light Card Sort Rationale/Lesson Abstract: Light vocabulary building, students identify and share vocabulary meaning. Timeframe: 10 to 20
Grade Level/Course: Grade 7 Life Science Lesson/Unit Plan Name: Light Card Sort Rationale/Lesson Abstract: Light vocabulary building, students identify and share vocabulary meaning. Timeframe: 10 to 20
CSE 473/573 Computer Vision and Image Processing (CVIP)
") CSE 473/573 Computer Vision and Image Processing (CVIP) Ifeoma Nwogu inwogu@buffalo.edu Lecture 4 Image formation(part I) Schedule Last class linear algebra overview Today Image formation and camera properties
CSE 473/573 Computer Vision and Image Processing (CVIP) Ifeoma Nwogu inwogu@buffalo.edu Lecture 4 Image formation(part I) Schedule Last class linear algebra overview Today Image formation and camera properties
Science 8 Unit 2 Pack:
 Science 8 Unit 2 Pack: Name Page 0 Section 4.1 : The Properties of Waves Pages By the end of section 4.1 you should be able to understand the following: Waves are disturbances that transmit energy from
Science 8 Unit 2 Pack: Name Page 0 Section 4.1 : The Properties of Waves Pages By the end of section 4.1 you should be able to understand the following: Waves are disturbances that transmit energy from
Lecture 7: Camera Models
 Lecture 7: Camera Models Professor Stanford Vision Lab 1 What we will learn toda? Pinhole cameras Cameras & lenses The geometr of pinhole cameras Reading: [FP]Chapters 1 3 [HZ] Chapter 6 2 What we will
Lecture 7: Camera Models Professor Stanford Vision Lab 1 What we will learn toda? Pinhole cameras Cameras & lenses The geometr of pinhole cameras Reading: [FP]Chapters 1 3 [HZ] Chapter 6 2 What we will
Colorado School of Mines. Computer Vision. Professor William Hoff Dept of Electrical Engineering &Computer Science.
 Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Sensors and Image Formation Imaging sensors and models of image formation Coordinate systems Digital
Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Sensors and Image Formation Imaging sensors and models of image formation Coordinate systems Digital
Chapter 36. Image Formation
 Chapter 36 Image Formation Notation for Mirrors and Lenses The object distance is the distance from the object to the mirror or lens Denoted by p The image distance is the distance from the image to the
Chapter 36 Image Formation Notation for Mirrors and Lenses The object distance is the distance from the object to the mirror or lens Denoted by p The image distance is the distance from the image to the
Image Formation: Camera Model
 Image Formation: Camera Model Ruigang Yang COMP 684 Fall 2005, CS684-IBMR Outline Camera Models Pinhole Perspective Projection Affine Projection Camera with Lenses Digital Image Formation The Human Eye
Image Formation: Camera Model Ruigang Yang COMP 684 Fall 2005, CS684-IBMR Outline Camera Models Pinhole Perspective Projection Affine Projection Camera with Lenses Digital Image Formation The Human Eye
Cameras, lenses and sensors
 Cameras, lenses and sensors Marc Pollefeys COMP 256 Cameras, lenses and sensors Camera Models Pinhole Perspective Projection Affine Projection Camera with Lenses Sensing The Human Eye Reading: Chapter.
Cameras, lenses and sensors Marc Pollefeys COMP 256 Cameras, lenses and sensors Camera Models Pinhole Perspective Projection Affine Projection Camera with Lenses Sensing The Human Eye Reading: Chapter.
Lecture 2 Digital Image Fundamentals. Lin ZHANG, PhD School of Software Engineering Tongji University Fall 2016
 Lecture 2 Digital Image Fundamentals Lin ZHANG, PhD School of Software Engineering Tongji University Fall 2016 Contents Elements of visual perception Light and the electromagnetic spectrum Image sensing
Lecture 2 Digital Image Fundamentals Lin ZHANG, PhD School of Software Engineering Tongji University Fall 2016 Contents Elements of visual perception Light and the electromagnetic spectrum Image sensing
Reading. 1. Visual perception. Outline. Forming an image. Optional: Glassner, Principles of Digital Image Synthesis, sections
 Reading Optional: Glassner, Principles of Digital mage Synthesis, sections 1.1-1.6. 1. Visual perception Brian Wandell. Foundations of Vision. Sinauer Associates, Sunderland, MA, 1995. Research papers:
Reading Optional: Glassner, Principles of Digital mage Synthesis, sections 1.1-1.6. 1. Visual perception Brian Wandell. Foundations of Vision. Sinauer Associates, Sunderland, MA, 1995. Research papers:
Lecture Outline Chapter 27. Physics, 4 th Edition James S. Walker. Copyright 2010 Pearson Education, Inc.
 Lecture Outline Chapter 27 Physics, 4 th Edition James S. Walker Chapter 27 Optical Instruments Units of Chapter 27 The Human Eye and the Camera Lenses in Combination and Corrective Optics The Magnifying
Lecture Outline Chapter 27 Physics, 4 th Edition James S. Walker Chapter 27 Optical Instruments Units of Chapter 27 The Human Eye and the Camera Lenses in Combination and Corrective Optics The Magnifying
UNIT 12 LIGHT and OPTICS
 UNIT 12 LIGHT and OPTICS What is light? Light is simply a name for a range of electromagnetic radiation that can be detected by the human eye. What characteristic does light have? Light is electromagnetic
UNIT 12 LIGHT and OPTICS What is light? Light is simply a name for a range of electromagnetic radiation that can be detected by the human eye. What characteristic does light have? Light is electromagnetic
Mastery. Chapter Content. What is light? CHAPTER 11 LESSON 1 C A
 Chapter Content Mastery What is light? LESSON 1 Directions: Use the letters on the diagram to identify the parts of the wave listed below. Write the correct letters on the line provided. 1. amplitude 2.
Chapter Content Mastery What is light? LESSON 1 Directions: Use the letters on the diagram to identify the parts of the wave listed below. Write the correct letters on the line provided. 1. amplitude 2.
Image Formation and Capture. Acknowledgment: some figures by B. Curless, E. Hecht, W.J. Smith, B.K.P. Horn, and A. Theuwissen
 Image Formation and Capture Acknowledgment: some figures by B. Curless, E. Hecht, W.J. Smith, B.K.P. Horn, and A. Theuwissen Image Formation and Capture Real world Optics Sensor Devices Sources of Error
Image Formation and Capture Acknowledgment: some figures by B. Curless, E. Hecht, W.J. Smith, B.K.P. Horn, and A. Theuwissen Image Formation and Capture Real world Optics Sensor Devices Sources of Error
ME 6406 MACHINE VISION. Georgia Institute of Technology
 ME 6406 MACHINE VISION Georgia Institute of Technology Class Information Instructor Professor Kok-Meng Lee MARC 474 Office hours: Tues/Thurs 1:00-2:00 pm kokmeng.lee@me.gatech.edu (404)-894-7402 Class
ME 6406 MACHINE VISION Georgia Institute of Technology Class Information Instructor Professor Kok-Meng Lee MARC 474 Office hours: Tues/Thurs 1:00-2:00 pm kokmeng.lee@me.gatech.edu (404)-894-7402 Class
Chapter 25 Optical Instruments
 Chapter 25 Optical Instruments Units of Chapter 25 Cameras, Film, and Digital The Human Eye; Corrective Lenses Magnifying Glass Telescopes Compound Microscope Aberrations of Lenses and Mirrors Limits of
Chapter 25 Optical Instruments Units of Chapter 25 Cameras, Film, and Digital The Human Eye; Corrective Lenses Magnifying Glass Telescopes Compound Microscope Aberrations of Lenses and Mirrors Limits of
Getting light to imager. Capturing Images. Depth and Distance. Ideal Imaging. CS559 Lecture 2 Lights, Cameras, Eyes
 CS559 Lecture 2 Lights, Cameras, Eyes Last time: what is an image idea of image-based (raster representation) Today: image capture/acquisition, focus cameras and eyes displays and intensities Corrected
CS559 Lecture 2 Lights, Cameras, Eyes Last time: what is an image idea of image-based (raster representation) Today: image capture/acquisition, focus cameras and eyes displays and intensities Corrected
Capturing light and color
 Capturing light and color Friday, 10/02/2017 Antonis Argyros e-mail: argyros@csd.uoc.gr Szeliski 2.2, 2.3, 3.1 1 Recap from last lecture Pinhole camera model Perspective projection Focal length and depth/field
Capturing light and color Friday, 10/02/2017 Antonis Argyros e-mail: argyros@csd.uoc.gr Szeliski 2.2, 2.3, 3.1 1 Recap from last lecture Pinhole camera model Perspective projection Focal length and depth/field
Life Science Chapter 2 Study Guide
 Key concepts and definitions Waves and the Electromagnetic Spectrum Wave Energy Medium Mechanical waves Amplitude Wavelength Frequency Speed Properties of Waves (pages 40-41) Trough Crest Hertz Electromagnetic
Key concepts and definitions Waves and the Electromagnetic Spectrum Wave Energy Medium Mechanical waves Amplitude Wavelength Frequency Speed Properties of Waves (pages 40-41) Trough Crest Hertz Electromagnetic
Further reading. 1. Visual perception. Restricting the light. Forming an image. Angel, section 1.4
 Further reading Angel, section 1.4 Glassner, Principles of Digital mage Synthesis, sections 1.1-1.6. 1. Visual perception Spencer, Shirley, Zimmerman, and Greenberg. Physically-based glare effects for
Further reading Angel, section 1.4 Glassner, Principles of Digital mage Synthesis, sections 1.1-1.6. 1. Visual perception Spencer, Shirley, Zimmerman, and Greenberg. Physically-based glare effects for
Image Formation. Light from distant things. Geometrical optics. Pinhole camera. Chapter 36
 Light from distant things Chapter 36 We learn about a distant thing from the light it generates or redirects. The lenses in our eyes create images of objects our brains can process. This chapter concerns
Light from distant things Chapter 36 We learn about a distant thing from the light it generates or redirects. The lenses in our eyes create images of objects our brains can process. This chapter concerns
Light. Path of Light. Looking at things. Depth and Distance. Getting light to imager. CS559 Lecture 2 Lights, Cameras, Eyes
 CS559 Lecture 2 Lights, Cameras, Eyes These are course notes (not used as slides) Written by Mike Gleicher, Sept. 2005 Adjusted after class stuff we didn t get to removed / mistakes fixed Light Electromagnetic
CS559 Lecture 2 Lights, Cameras, Eyes These are course notes (not used as slides) Written by Mike Gleicher, Sept. 2005 Adjusted after class stuff we didn t get to removed / mistakes fixed Light Electromagnetic
CPSC 4040/6040 Computer Graphics Images. Joshua Levine
 CPSC 4040/6040 Computer Graphics Images Joshua Levine levinej@clemson.edu Lecture 04 Displays and Optics Sept. 1, 2015 Slide Credits: Kenny A. Hunt Don House Torsten Möller Hanspeter Pfister Agenda Open
CPSC 4040/6040 Computer Graphics Images Joshua Levine levinej@clemson.edu Lecture 04 Displays and Optics Sept. 1, 2015 Slide Credits: Kenny A. Hunt Don House Torsten Möller Hanspeter Pfister Agenda Open
Chapter 29/30. Wave Fronts and Rays. Refraction of Sound. Dispersion in a Prism. Index of Refraction. Refraction and Lenses
 Chapter 29/30 Refraction and Lenses Refraction Refraction the bending of waves as they pass from one medium into another. Caused by a change in the average speed of light. Analogy A car that drives off
Chapter 29/30 Refraction and Lenses Refraction Refraction the bending of waves as they pass from one medium into another. Caused by a change in the average speed of light. Analogy A car that drives off
Refraction, Lenses, and Prisms
 CHAPTER 16 14 SECTION Sound and Light Refraction, Lenses, and Prisms KEY IDEAS As you read this section, keep these questions in mind: What happens to light when it passes from one medium to another? How
CHAPTER 16 14 SECTION Sound and Light Refraction, Lenses, and Prisms KEY IDEAS As you read this section, keep these questions in mind: What happens to light when it passes from one medium to another? How
Digital Image Processing
 Part 1: Course Introduction Achim J. Lilienthal AASS Learning Systems Lab, Dep. Teknik Room T1209 (Fr, 11-12 o'clock) achim.lilienthal@oru.se Course Book Chapters 1 & 2 2011-04-05 Contents 1. Introduction
Part 1: Course Introduction Achim J. Lilienthal AASS Learning Systems Lab, Dep. Teknik Room T1209 (Fr, 11-12 o'clock) achim.lilienthal@oru.se Course Book Chapters 1 & 2 2011-04-05 Contents 1. Introduction
Lecture 02 Image Formation 1
 Institute of Informatics Institute of Neuroinformatics Lecture 02 Image Formation 1 Davide Scaramuzza http://rpg.ifi.uzh.ch 1 Lab Exercise 1 - Today afternoon Room ETH HG E 1.1 from 13:15 to 15:00 Work
Institute of Informatics Institute of Neuroinformatics Lecture 02 Image Formation 1 Davide Scaramuzza http://rpg.ifi.uzh.ch 1 Lab Exercise 1 - Today afternoon Room ETH HG E 1.1 from 13:15 to 15:00 Work
Motion illusion, rotating snakes
 Motion illusion, rotating snakes Previous classes Computer vision overview Mathematics of pinhole camera Sensors and light Recap: projection X t x K R 1 1 0 0 0 1 33 32 31 23 22 21 13 12 11 0 0 z y x t
Motion illusion, rotating snakes Previous classes Computer vision overview Mathematics of pinhole camera Sensors and light Recap: projection X t x K R 1 1 0 0 0 1 33 32 31 23 22 21 13 12 11 0 0 z y x t
Lecture 7: homogeneous coordinates
 Lecture 7: homogeneous Dr. Richard E. Turner (ret26@cam.ac.uk) October 31, 2013 House keeping webpage: http://cbl.eng.cam.ac.uk/public/turner/teaching Recap of last lecture: Pin hole camera image plane
Lecture 7: homogeneous Dr. Richard E. Turner (ret26@cam.ac.uk) October 31, 2013 House keeping webpage: http://cbl.eng.cam.ac.uk/public/turner/teaching Recap of last lecture: Pin hole camera image plane
Cameras. Steve Rotenberg CSE168: Rendering Algorithms UCSD, Spring 2017
 Cameras Steve Rotenberg CSE168: Rendering Algorithms UCSD, Spring 2017 Camera Focus Camera Focus So far, we have been simulating pinhole cameras with perfect focus Often times, we want to simulate more
Cameras Steve Rotenberg CSE168: Rendering Algorithms UCSD, Spring 2017 Camera Focus Camera Focus So far, we have been simulating pinhole cameras with perfect focus Often times, we want to simulate more
The Human Visual System. Lecture 1. The Human Visual System. The Human Eye. The Human Retina. cones. rods. horizontal. bipolar. amacrine.
 Lecture The Human Visual System The Human Visual System Retina Optic Nerve Optic Chiasm Lateral Geniculate Nucleus (LGN) Visual Cortex The Human Eye The Human Retina Lens rods cones Cornea Fovea Optic
Lecture The Human Visual System The Human Visual System Retina Optic Nerve Optic Chiasm Lateral Geniculate Nucleus (LGN) Visual Cortex The Human Eye The Human Retina Lens rods cones Cornea Fovea Optic
Image formation - Cameras. Grading & Project. About the course. Tentative Schedule. Course Content. Students introduction
 About the course Instructors: Haibin Ling (hbling@temple, Wachman 35) Hours Lecture: Tuesda 5:3-8:pm, TTLMAN 43B Office hour: Tuesda 3: - 5:pm, or b appointment Textbook Computer Vision: Models, Learning,
About the course Instructors: Haibin Ling (hbling@temple, Wachman 35) Hours Lecture: Tuesda 5:3-8:pm, TTLMAN 43B Office hour: Tuesda 3: - 5:pm, or b appointment Textbook Computer Vision: Models, Learning,
Vision. The eye. Image formation. Eye defects & corrective lenses. Visual acuity. Colour vision. Lecture 3.5
 Lecture 3.5 Vision The eye Image formation Eye defects & corrective lenses Visual acuity Colour vision Vision http://www.wired.com/wiredscience/2009/04/schizoillusion/ Perception of light--- eye-brain
Lecture 3.5 Vision The eye Image formation Eye defects & corrective lenses Visual acuity Colour vision Vision http://www.wired.com/wiredscience/2009/04/schizoillusion/ Perception of light--- eye-brain
The eye & corrective lenses
 Phys 102 Lecture 20 The eye & corrective lenses 1 Today we will... Apply concepts from ray optics & lenses Simple optical instruments the camera & the eye Learn about the human eye Accommodation Myopia,
Phys 102 Lecture 20 The eye & corrective lenses 1 Today we will... Apply concepts from ray optics & lenses Simple optical instruments the camera & the eye Learn about the human eye Accommodation Myopia,
Image Formation III Chapter 1 (Forsyth&Ponce) Cameras Lenses & Sensors
 Cameras Lenses & Sensors") Image Formation III Chapter 1 (Forsyth&Ponce) Cameras Lenses & Sensors Guido Gerig CS-GY 6643, Spring 2017 (slides modified from Marc Pollefeys, UNC Chapel Hill/ ETH Zurich, With content from Prof. Trevor
Image Formation III Chapter 1 (Forsyth&Ponce) Cameras Lenses & Sensors Guido Gerig CS-GY 6643, Spring 2017 (slides modified from Marc Pollefeys, UNC Chapel Hill/ ETH Zurich, With content from Prof. Trevor
Proj 2. Looks like the evaluation function changed in converting to Python, and 80% on Notre Dame is more tricky to reach.
 Proj 2 Looks like the evaluation function changed in converting to Python, and 80% on Notre Dame is more tricky to reach. We will tweak the percentages. Leaderboard / Gradescope is up. Extra Credit Please
Proj 2 Looks like the evaluation function changed in converting to Python, and 80% on Notre Dame is more tricky to reach. We will tweak the percentages. Leaderboard / Gradescope is up. Extra Credit Please
Image Formation. Dr. Gerhard Roth. COMP 4102A Winter 2015 Version 3
 Image Formation Dr. Gerhard Roth COMP 4102A Winter 2015 Version 3 1 Image Formation Two type of images Intensity image encodes light intensities (passive sensor) Range (depth) image encodes shape and distance
Image Formation Dr. Gerhard Roth COMP 4102A Winter 2015 Version 3 1 Image Formation Two type of images Intensity image encodes light intensities (passive sensor) Range (depth) image encodes shape and distance
TSBB09 Image Sensors 2018-HT2. Image Formation Part 1
 TSBB09 Image Sensors 2018-HT2 Image Formation Part 1 Basic physics Electromagnetic radiation consists of electromagnetic waves With energy That propagate through space The waves consist of transversal
TSBB09 Image Sensors 2018-HT2 Image Formation Part 1 Basic physics Electromagnetic radiation consists of electromagnetic waves With energy That propagate through space The waves consist of transversal
Chapters 1 & 2. Definitions and applications Conceptual basis of photogrammetric processing
 Chapters 1 & 2 Chapter 1: Photogrammetry Definitions and applications Conceptual basis of photogrammetric processing Transition from two-dimensional imagery to three-dimensional information Automation
Chapters 1 & 2 Chapter 1: Photogrammetry Definitions and applications Conceptual basis of photogrammetric processing Transition from two-dimensional imagery to three-dimensional information Automation
[ Summary. 3i = 1* 6i = 4J;
 the projections at angle 2. We calculate the difference between the measured projections at angle 2 (6 and 14) and the projections based on the previous esti mate (top row: 2>\ + 6\ = 10; same for bottom
the projections at angle 2. We calculate the difference between the measured projections at angle 2 (6 and 14) and the projections based on the previous esti mate (top row: 2>\ + 6\ = 10; same for bottom
Optics Review (Chapters 11, 12, 13)
") Optics Review (Chapters 11, 12, 13) Complete the following questions in preparation for your test on FRIDAY. The notes that you need are in italics. Try to answer it on your own first, then check with
Optics Review (Chapters 11, 12, 13) Complete the following questions in preparation for your test on FRIDAY. The notes that you need are in italics. Try to answer it on your own first, then check with
Use these words to complete the sentences about light: absorb different diffuse focus prism refraction same slower specula transmit
 Aims In the activity you will learn more about how we see, how light interacts with materials, and how we see colour. Task 1: Light Use these words to complete the sentences about light: absorb different
Aims In the activity you will learn more about how we see, how light interacts with materials, and how we see colour. Task 1: Light Use these words to complete the sentences about light: absorb different
CMPSCI 670: Computer Vision! Color. University of Massachusetts, Amherst September 15, 2014 Instructor: Subhransu Maji
 CMPSCI 670: Computer Vision! Color University of Massachusetts, Amherst September 15, 2014 Instructor: Subhransu Maji Slides by D.A. Forsyth 2 Color is the result of interaction between light in the environment
CMPSCI 670: Computer Vision! Color University of Massachusetts, Amherst September 15, 2014 Instructor: Subhransu Maji Slides by D.A. Forsyth 2 Color is the result of interaction between light in the environment
Ch 24. Geometric Optics
 text concept Ch 24. Geometric Optics Fig. 24 3 A point source of light P and its image P, in a plane mirror. Angle of incidence =angle of reflection. text. Fig. 24 4 The blue dashed line through object
text concept Ch 24. Geometric Optics Fig. 24 3 A point source of light P and its image P, in a plane mirror. Angle of incidence =angle of reflection. text. Fig. 24 4 The blue dashed line through object
Basic principles of photography. David Capel 346B IST
 Basic principles of photography David Capel 346B IST Latin Camera Obscura = Dark Room Light passing through a small hole produces an inverted image on the opposite wall Safely observing the solar eclipse
Basic principles of photography David Capel 346B IST Latin Camera Obscura = Dark Room Light passing through a small hole produces an inverted image on the opposite wall Safely observing the solar eclipse
Physical Science Physics
 Name Physical Science Physics C/By Due Date Code Period Earned Points PSP 5W4 Seeing Problems (divide by 11) Multiple Choice Identify the letter of the choice that best completes the statement or answers
Name Physical Science Physics C/By Due Date Code Period Earned Points PSP 5W4 Seeing Problems (divide by 11) Multiple Choice Identify the letter of the choice that best completes the statement or answers
Retina. Convergence. Early visual processing: retina & LGN. Visual Photoreptors: rods and cones. Visual Photoreptors: rods and cones.
 Announcements 1 st exam (next Thursday): Multiple choice (about 22), short answer and short essay don t list everything you know for the essay questions Book vs. lectures know bold terms for things that
Announcements 1 st exam (next Thursday): Multiple choice (about 22), short answer and short essay don t list everything you know for the essay questions Book vs. lectures know bold terms for things that
Digital Image Processing
 Digital Image Processing Lecture # 3 Digital Image Fundamentals ALI JAVED Lecturer SOFTWARE ENGINEERING DEPARTMENT U.E.T TAXILA Email:: ali.javed@uettaxila.edu.pk Office Room #:: 7 Presentation Outline
Digital Image Processing Lecture # 3 Digital Image Fundamentals ALI JAVED Lecturer SOFTWARE ENGINEERING DEPARTMENT U.E.T TAXILA Email:: ali.javed@uettaxila.edu.pk Office Room #:: 7 Presentation Outline
Lenses. Overview. Terminology. The pinhole camera. Pinhole camera Lenses Principles of operation Limitations
 Overview Pinhole camera Principles of operation Limitations 1 Terminology The pinhole camera The first camera - camera obscura - known to Aristotle. In 3D, we can visualize the blur induced by the pinhole
Overview Pinhole camera Principles of operation Limitations 1 Terminology The pinhole camera The first camera - camera obscura - known to Aristotle. In 3D, we can visualize the blur induced by the pinhole
SCIENCE 8 WORKBOOK Chapter 6 Human Vision Ms. Jamieson 2018 This workbook belongs to:
 SCIENCE 8 WORKBOOK Chapter 6 Human Vision Ms. Jamieson 2018 This workbook belongs to: Eric Hamber Secondary 5025 Willow Street Vancouver, BC Table of Contents A. Chapter 6.1 Parts of the eye.. Parts of
SCIENCE 8 WORKBOOK Chapter 6 Human Vision Ms. Jamieson 2018 This workbook belongs to: Eric Hamber Secondary 5025 Willow Street Vancouver, BC Table of Contents A. Chapter 6.1 Parts of the eye.. Parts of
Lecture 9. Lecture 9. t (min)
") Sensitivity of the Eye Lecture 9 The eye is capable of dark adaptation. This comes about by opening of the iris, as well as a change in rod cell photochemistry fovea only least perceptible brightness 10
Sensitivity of the Eye Lecture 9 The eye is capable of dark adaptation. This comes about by opening of the iris, as well as a change in rod cell photochemistry fovea only least perceptible brightness 10
Lenses, exposure, and (de)focus
focus") Lenses, exposure, and (de)focus http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 15 Course announcements Homework 4 is out. - Due October 26
Lenses, exposure, and (de)focus http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 15 Course announcements Homework 4 is out. - Due October 26
PHYSICS. Chapter 35 Lecture FOR SCIENTISTS AND ENGINEERS A STRATEGIC APPROACH 4/E RANDALL D. KNIGHT
 PHYSICS FOR SCIENTISTS AND ENGINEERS A STRATEGIC APPROACH 4/E Chapter 35 Lecture RANDALL D. KNIGHT Chapter 35 Optical Instruments IN THIS CHAPTER, you will learn about some common optical instruments and
PHYSICS FOR SCIENTISTS AND ENGINEERS A STRATEGIC APPROACH 4/E Chapter 35 Lecture RANDALL D. KNIGHT Chapter 35 Optical Instruments IN THIS CHAPTER, you will learn about some common optical instruments and
Vision and Color. Reading. The lensmaker s formula. Lenses. Brian Curless CSEP 557 Autumn Good resources:
 Reading Good resources: Vision and Color Brian Curless CSEP 557 Autumn 2017 Glassner, Principles of Digital Image Synthesis, pp. 5-32. Palmer, Vision Science: Photons to Phenomenology. Wandell. Foundations
Reading Good resources: Vision and Color Brian Curless CSEP 557 Autumn 2017 Glassner, Principles of Digital Image Synthesis, pp. 5-32. Palmer, Vision Science: Photons to Phenomenology. Wandell. Foundations
Capturing Light in man and machine
 Capturing Light in man and machine 15-463: Computational Photography Alexei Efros, CMU, Fall 2008 Image Formation Digital Camera Film The Eye Digital camera A digital camera replaces film with a sensor
Capturing Light in man and machine 15-463: Computational Photography Alexei Efros, CMU, Fall 2008 Image Formation Digital Camera Film The Eye Digital camera A digital camera replaces film with a sensor
OPTICAL SYSTEMS OBJECTIVES
 101 L7 OPTICAL SYSTEMS OBJECTIVES Aims Your aim here should be to acquire a working knowledge of the basic components of optical systems and understand their purpose, function and limitations in terms
101 L7 OPTICAL SYSTEMS OBJECTIVES Aims Your aim here should be to acquire a working knowledge of the basic components of optical systems and understand their purpose, function and limitations in terms
Chapter 2: Digital Image Fundamentals. Digital image processing is based on. Mathematical and probabilistic models Human intuition and analysis
 Chapter 2: Digital Image Fundamentals Digital image processing is based on Mathematical and probabilistic models Human intuition and analysis 2.1 Visual Perception How images are formed in the eye? Eye
Chapter 2: Digital Image Fundamentals Digital image processing is based on Mathematical and probabilistic models Human intuition and analysis 2.1 Visual Perception How images are formed in the eye? Eye
Overview. Image formation - 1
 Overview perspective imaging Image formation Refraction of light Thin-lens equation Optical power and accommodation Image irradiance and scene radiance Digital images Introduction to MATLAB Image formation
Overview perspective imaging Image formation Refraction of light Thin-lens equation Optical power and accommodation Image irradiance and scene radiance Digital images Introduction to MATLAB Image formation
Physics 1202: Lecture 19 Today s Agenda
 Physics 1202: Lecture 19 Today s Agenda Announcements: Team problems today Team 12: Kervell Baird, Matthew George, Derek Schultz Team 13: Paxton Stowik, Stacey Ann Burke Team 14: Gregory Desautels, Benjamin
Physics 1202: Lecture 19 Today s Agenda Announcements: Team problems today Team 12: Kervell Baird, Matthew George, Derek Schultz Team 13: Paxton Stowik, Stacey Ann Burke Team 14: Gregory Desautels, Benjamin
Chapter 25. Optical Instruments
 Chapter 25 Optical Instruments Optical Instruments Analysis generally involves the laws of reflection and refraction Analysis uses the procedures of geometric optics To explain certain phenomena, the wave
Chapter 25 Optical Instruments Optical Instruments Analysis generally involves the laws of reflection and refraction Analysis uses the procedures of geometric optics To explain certain phenomena, the wave
Yokohama City University lecture INTRODUCTION TO HUMAN VISION Presentation notes 7/10/14
 Yokohama City University lecture INTRODUCTION TO HUMAN VISION Presentation notes 7/10/14 1. INTRODUCTION TO HUMAN VISION Self introduction Dr. Salmon Northeastern State University, Oklahoma. USA Teach
Yokohama City University lecture INTRODUCTION TO HUMAN VISION Presentation notes 7/10/14 1. INTRODUCTION TO HUMAN VISION Self introduction Dr. Salmon Northeastern State University, Oklahoma. USA Teach
Cameras. Shrinking the aperture. Camera trial #1. Pinhole camera. Digital Visual Effects Yung-Yu Chuang. Put a piece of film in front of an object.
 Camera trial #1 Cameras Digital Visual Effects Yung-Yu Chuang scene film with slides by Fredo Durand, Brian Curless, Steve Seitz and Alexei Efros Put a piece of film in front of an object. Pinhole camera
Camera trial #1 Cameras Digital Visual Effects Yung-Yu Chuang scene film with slides by Fredo Durand, Brian Curless, Steve Seitz and Alexei Efros Put a piece of film in front of an object. Pinhole camera
Topic 4: Lenses and Vision. Lens a curved transparent material through which light passes (transmit) Ex) glass, plastic
 Ex) glass, plastic") Topic 4: Lenses and Vision Lens a curved transparent material through which light passes (transmit) Ex) glass, plastic Double Concave Lenses Are thinner and flatter in the middle than around the edges.
Topic 4: Lenses and Vision Lens a curved transparent material through which light passes (transmit) Ex) glass, plastic Double Concave Lenses Are thinner and flatter in the middle than around the edges.
Astronomical Cameras
 Astronomical Cameras I. The Pinhole Camera Pinhole Camera (or Camera Obscura) Whenever light passes through a small hole or aperture it creates an image opposite the hole This is an effect wherever apertures
Astronomical Cameras I. The Pinhole Camera Pinhole Camera (or Camera Obscura) Whenever light passes through a small hole or aperture it creates an image opposite the hole This is an effect wherever apertures
Capturing Light in man and machine
 Capturing Light in man and machine CS194: Image Manipulation & Computational Photography Alexei Efros, UC Berkeley, Fall 2014 Etymology PHOTOGRAPHY light drawing / writing Image Formation Digital Camera
Capturing Light in man and machine CS194: Image Manipulation & Computational Photography Alexei Efros, UC Berkeley, Fall 2014 Etymology PHOTOGRAPHY light drawing / writing Image Formation Digital Camera
Image Processing - Intro. Tamás Szirányi
 Image Processing - Intro Tamás Szirányi The path of light through optics A Brief History of Images 1558 Camera Obscura, Gemma Frisius, 1558 A Brief History of Images 1558 1568 Lens Based Camera Obscura,
Image Processing - Intro Tamás Szirányi The path of light through optics A Brief History of Images 1558 Camera Obscura, Gemma Frisius, 1558 A Brief History of Images 1558 1568 Lens Based Camera Obscura,
Vision and Color. Reading. Optics, cont d. Lenses. d d f. Brian Curless CSE 557 Autumn Good resources:
 Reading Good resources: Vision and Color Brian Curless CSE 557 Autumn 2015 Glassner, Principles of Digital Image Synthesis, pp. 5-32. Palmer, Vision Science: Photons to Phenomenology. Wandell. Foundations
Reading Good resources: Vision and Color Brian Curless CSE 557 Autumn 2015 Glassner, Principles of Digital Image Synthesis, pp. 5-32. Palmer, Vision Science: Photons to Phenomenology. Wandell. Foundations
Vision and Color. Brian Curless CSE 557 Autumn 2015
 Vision and Color Brian Curless CSE 557 Autumn 2015 1 Reading Good resources: Glassner, Principles of Digital Image Synthesis, pp. 5-32. Palmer, Vision Science: Photons to Phenomenology. Wandell. Foundations
Vision and Color Brian Curless CSE 557 Autumn 2015 1 Reading Good resources: Glassner, Principles of Digital Image Synthesis, pp. 5-32. Palmer, Vision Science: Photons to Phenomenology. Wandell. Foundations
AS Psychology Activity 4
 AS Psychology Activity 4 Anatomy of The Eye Light enters the eye and is brought into focus by the cornea and the lens. The fovea is the focal point it is a small depression in the retina, at the back of
AS Psychology Activity 4 Anatomy of The Eye Light enters the eye and is brought into focus by the cornea and the lens. The fovea is the focal point it is a small depression in the retina, at the back of