Intelligent Instruments. Kevin H. Knuth Department of Physics University at Albany
|
|
|
- Frederica Thomas
- 6 years ago
- Views:
Transcription

1 Intelligent Instruments Kevin H. Knuth Department of Physics University at Albany


2 Where is the wisdom we have lost in knowledge? Where is the knowledge we have lost in information? From "The Rock" by T.S. Elliot


3 Remote Science Opportunity on Mars More and more are our instruments required to perform science operations further from the intervention of humans. Dust devils whip across Gusev Crater on Mars
4 Intelligent Autonomous Instruments Require: Stability Control Instrument Health Monitoring Automated Calibration Accurate Onboard Data Analysis Adequate Data Coverage Ability to Actively Seek Data
5 Novel Instrument Design To accomplish these goals, these novel instruments must Monitor their own state (health and calibration) Infer their state from self-sensing Be equipped with dense sensor networks Infer calibration parameters Learn from data Make inferences from data Perform hypothesis testing Ask new questions Actively seek new data Select optimal experiments

6 Sound Familiar? Your frontal lobes carry a model of yourself that is continually updated from data received from a dense sensor network. This implements both Instrument Health Monitoring and Calibration You learn from new data by updating your model of the world. You actively seek new data by asking relevant questions.

7 Body and Brain form a Symbiotic Unit



8 Instruments and Data Analysis are Disjoint
9 The Basic Components
10 Intelligent Instrument Test Bed

11 NASA Funded Research Intelligent Symbiotic Instrument Analysis Systems

12 The Dispersed Fourier Transform Spectrometer Courtesy: Dr. Arsen Hajian
13 The Alignment Schematic Light (blue) enters the spectrometer through a fiber optic launcher. A laser beam (red) is injected into the system for metrology. It is filtered out of the results with optical notch filters. Cameras C1-8 collect data for the autoalignment system. Barriers B1-6 can be introduced via autoalignment system to test various sub-systems.
14 Auto-Alignment and Stabilization We can align dfts from anywhere in the world Alignment required 5 minutes on Code in Java (cross-platform) Modified our full-aperture metrology system to create an active compensation system Compute f(t) with respect to f(t o ) using lock-in-amp (SR830) Feed error signal back to delay line (Parker) Refine results with further Bayesian calibration
15 Problems and Solutions Problem: Collaborator afraid we would steal the design of his instrument. Solution: Design and Construct our own Instrument Problem 1: Collaborator concerned about having automated software run his expensive instrument. Solution: Instrument must be inexpensive in the event of a catastrophe Problem 2: NASA management confused instrument already takes data in an automated fashion. Solution 1: New management Solution 2: Instrument must be OBVIOUSLY Intelligent. Problem: NASA cuts funding to entire program Solution: Instrument must be inexpensive Solution: Secure funding from alternate sources

16 The LEGO Mindstorms NXT System 1 The NXT Brick is the brain of the system. 2 Touch Sensor 3 Microphone 4 Light Sensor 5 Ultrasonic Rangefinder 6 Servo Motors


17 Lego teams with HiTecnic NEW! Accelerometer Prototype Board Color Sensor Digital Compass Sensor and Motor Multiplexers


18 NXT Communicates with Laptop Software Hardware SYMBIOTIC!
")
19 LDRAW (Lego Cad System)

20 Rendering and Animating Designs Created by Kevin Knuth 2007 with LDraw and POVRay
21 Advantages of Lego NXT 1. Cost: One NXT Robotics Kit = $ Design: Robot Bodies are not constrained 3. Construction: Robots can be built in a matter of hours 4. Documentation: LDraw software allows one to thoroughly document the robot s construction. One can generate Parts Lists, Keep design or send to many others. 5. Brick: The Brick is programmable, but can also be set up to talk to a computer. This enables complex software to effectively run in reasonable times for Real Time adventures.
22







23 Characterization with a Light Sensor GOAL: Characterize the circle: {x, y, r} with as few measurements as possible CONSTRAINT: Only point measurements are allowed
24 Sample from the Posterior After several measurements, the posterior in {x, y, r}-space becomes well-localized. Here are possible solutions sampled from the posterior using nested sampling

25 Sample from the Posterior By querying each sampled circle, we can obtain a set of hypothesized measurements for each possible measurement location. From this we create an entropy map, which tells us where we can expect to obtain the greatest amount of information.
26 NXT Steps


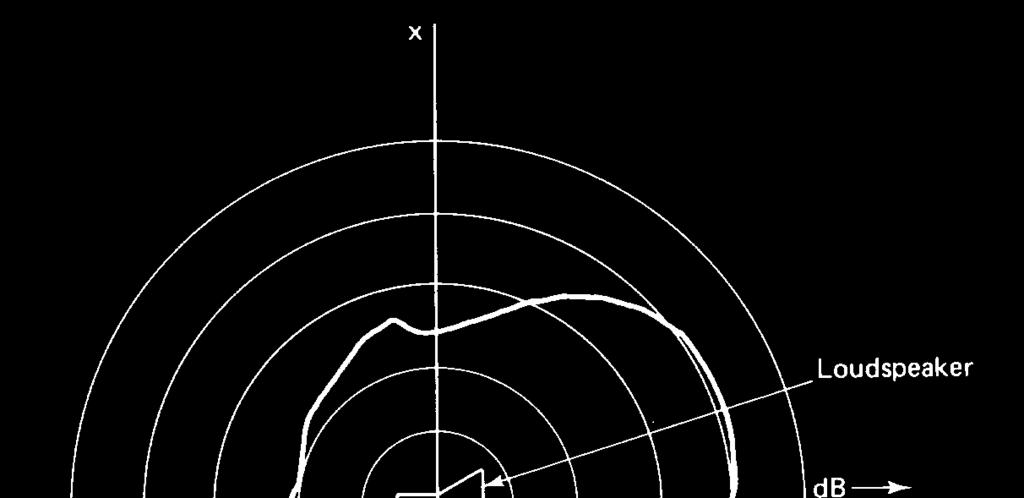

27 Measure Acoustic Radiation Pattern

28 Laser Scanner

29 Which Experiment? In the future, he won t need help from humans to determine the best experiment to perform. He ll decide for himself.
30 Acknowledgements: NASA SISM IS Program (Knuth) SIM Preparatory Science Program (NRA 98-OSS-07) (Hajian) Thanks Arsen Hajian USNO J. Pat Castle EA/NASA Ames Nikolay Lvov QSS/NASA Ames John Stutz NASA Ames Dogan Timucin NASA Ames Kevin Wheeler NASA Ames Brian Pohl UNC Chapel Hill J. Thomas Armstrong NRL David Mozurkewich NRL Robert B. Hindsley NRL Christopher Tycner Univ. of Toronto Robert Olling USNO P.S. There is nothing wrong with human intervention

31
Hands On Activity: Robotics in the Classroom. Using Lego Mindstorms (Prepared by Connie Gomez and Virgilio Gonzalez)
") Hands On Activity: Robotics in the Classroom Using Lego Mindstorms (Prepared by Connie Gomez and Virgilio Gonzalez) Group Discussion Your concepts of robotics? Your experiences with robots? Your experiences
Hands On Activity: Robotics in the Classroom Using Lego Mindstorms (Prepared by Connie Gomez and Virgilio Gonzalez) Group Discussion Your concepts of robotics? Your experiences with robots? Your experiences
Pre-Activity Quiz. 2 feet forward in a straight line? 1. What is a design challenge? 2. How do you program a robot to move
 Maze Challenge Pre-Activity Quiz 1. What is a design challenge? 2. How do you program a robot to move 2 feet forward in a straight line? 2 Pre-Activity Quiz Answers 1. What is a design challenge? A design
Maze Challenge Pre-Activity Quiz 1. What is a design challenge? 2. How do you program a robot to move 2 feet forward in a straight line? 2 Pre-Activity Quiz Answers 1. What is a design challenge? A design
University of Florida Department of Electrical and Computer Engineering Intelligent Machine Design Laboratory EEL 4665 Spring 2013 LOSAT
 University of Florida Department of Electrical and Computer Engineering Intelligent Machine Design Laboratory EEL 4665 Spring 2013 LOSAT Brandon J. Patton Instructors: Drs. Antonio Arroyo and Eric Schwartz
University of Florida Department of Electrical and Computer Engineering Intelligent Machine Design Laboratory EEL 4665 Spring 2013 LOSAT Brandon J. Patton Instructors: Drs. Antonio Arroyo and Eric Schwartz
Robotics 2a. What Have We Got to Work With?
 Robotics 2a Introduction to the Lego Mindstorm EV3 What we re going to do in the session. Introduce you to the Lego Mindstorm Kits The Design Process Design Our Robot s Chassis What Have We Got to Work
Robotics 2a Introduction to the Lego Mindstorm EV3 What we re going to do in the session. Introduce you to the Lego Mindstorm Kits The Design Process Design Our Robot s Chassis What Have We Got to Work
Mindstorms NXT. mindstorms.lego.com
 Mindstorms NXT mindstorms.lego.com A3B99RO Robots: course organization At the beginning of the semester the students are divided into small teams (2 to 3 students). Each team uses the basic set of the
Mindstorms NXT mindstorms.lego.com A3B99RO Robots: course organization At the beginning of the semester the students are divided into small teams (2 to 3 students). Each team uses the basic set of the
Designing Toys That Come Alive: Curious Robots for Creative Play
 Designing Toys That Come Alive: Curious Robots for Creative Play Kathryn Merrick School of Information Technologies and Electrical Engineering University of New South Wales, Australian Defence Force Academy
Designing Toys That Come Alive: Curious Robots for Creative Play Kathryn Merrick School of Information Technologies and Electrical Engineering University of New South Wales, Australian Defence Force Academy
2015 Maryland State 4-H LEGO Robotic Challenge
 Trash Talk Utilizing Trash to Power the World 2015 Maryland State 4-H LEGO Robotic Challenge Through Trash Talk, 4-H members involved in robotics will create LEGO robots that complete tasks related to
Trash Talk Utilizing Trash to Power the World 2015 Maryland State 4-H LEGO Robotic Challenge Through Trash Talk, 4-H members involved in robotics will create LEGO robots that complete tasks related to
Vision Ques t. Vision Quest. Use the Vision Sensor to drive your robot in Vision Quest!
 Vision Ques t Vision Quest Use the Vision Sensor to drive your robot in Vision Quest! Seek Discover new hands-on builds and programming opportunities to further your understanding of a subject matter.
Vision Ques t Vision Quest Use the Vision Sensor to drive your robot in Vision Quest! Seek Discover new hands-on builds and programming opportunities to further your understanding of a subject matter.
Welcome to. NXT Basics. Presenter: Wael Hajj Ali With assistance of: Ammar Shehadeh - Souhaib Alzanki - Samer Abuthaher
 Welcome to NXT Basics Presenter: Wael Hajj Ali With assistance of: Ammar Shehadeh - Souhaib Alzanki - Samer Abuthaher Outline Have you met the Lizard? Introducing the Platform Lego Parts Motors Sensors
Welcome to NXT Basics Presenter: Wael Hajj Ali With assistance of: Ammar Shehadeh - Souhaib Alzanki - Samer Abuthaher Outline Have you met the Lizard? Introducing the Platform Lego Parts Motors Sensors
Building Robots With Lego Mindstorms Nxt
 We have made it easy for you to find a PDF Ebooks without any digging. And by having access to our ebooks online or by storing it on your computer, you have convenient answers with building robots with
We have made it easy for you to find a PDF Ebooks without any digging. And by having access to our ebooks online or by storing it on your computer, you have convenient answers with building robots with
Chapter 1. Robots and Programs
 Chapter 1 Robots and Programs 1 2 Chapter 1 Robots and Programs Introduction Without a program, a robot is just an assembly of electronic and mechanical components. This book shows you how to give it a
Chapter 1 Robots and Programs 1 2 Chapter 1 Robots and Programs Introduction Without a program, a robot is just an assembly of electronic and mechanical components. This book shows you how to give it a
Developing Novel Extensions to Support Prototyping for Interactive Social Robots
 Developing Novel Extensions to Support Prototyping for Interactive Social Robots Martijn ten Bhömer, Christoph Bartneck, Jun Hu, Rene Ahn, Karl Tuyls, Frank Delbressine, and Loe Feijs Department of Industrial
Developing Novel Extensions to Support Prototyping for Interactive Social Robots Martijn ten Bhömer, Christoph Bartneck, Jun Hu, Rene Ahn, Karl Tuyls, Frank Delbressine, and Loe Feijs Department of Industrial
: Robots for Education and Entertainment. Sara Schütz
 8.12.2008: Robots for Education and Entertainment Sara Schütz Table of Contents What means Robot for Education&Entertainment? Educational Robots: The Telebots Project -Introduction -How it works Entertainment
8.12.2008: Robots for Education and Entertainment Sara Schütz Table of Contents What means Robot for Education&Entertainment? Educational Robots: The Telebots Project -Introduction -How it works Entertainment
Path Following and Obstacle Avoidance Fuzzy Controller for Mobile Indoor Robots
 Path Following and Obstacle Avoidance Fuzzy Controller for Mobile Indoor Robots Mousa AL-Akhras, Maha Saadeh, Emad AL Mashakbeh Computer Information Systems Department King Abdullah II School for Information
Path Following and Obstacle Avoidance Fuzzy Controller for Mobile Indoor Robots Mousa AL-Akhras, Maha Saadeh, Emad AL Mashakbeh Computer Information Systems Department King Abdullah II School for Information
After Performance Report Of the Robot
 After Performance Report Of the Robot Engineering 112 Spring 2007 Instructor: Dr. Ghada Salama By Mahmudul Alam Tareq Al Maaita Ismail El Ebiary Section- 502 Date: May 2, 2007 Introduction: The report
After Performance Report Of the Robot Engineering 112 Spring 2007 Instructor: Dr. Ghada Salama By Mahmudul Alam Tareq Al Maaita Ismail El Ebiary Section- 502 Date: May 2, 2007 Introduction: The report
T.C. MARMARA UNIVERSITY FACULTY of ENGINEERING COMPUTER ENGINEERING DEPARTMENT
 T.C. MARMARA UNIVERSITY FACULTY of ENGINEERING COMPUTER ENGINEERING DEPARTMENT CSE497 Engineering Project Project Specification Document INTELLIGENT WALL CONSTRUCTION BY MEANS OF A ROBOTIC ARM Group Members
T.C. MARMARA UNIVERSITY FACULTY of ENGINEERING COMPUTER ENGINEERING DEPARTMENT CSE497 Engineering Project Project Specification Document INTELLIGENT WALL CONSTRUCTION BY MEANS OF A ROBOTIC ARM Group Members
Pre-Day Questionnaire
 LEGO Mindstorms Pre-Day Questionnaire Your Age? Please select your age from the options below: a) 11 b) 12 c) 13 d) 14 e) 15 or Older 0 0 0 0 0 11 12 13 14 15&or&Older Good at Problem Solving? Do you think
LEGO Mindstorms Pre-Day Questionnaire Your Age? Please select your age from the options below: a) 11 b) 12 c) 13 d) 14 e) 15 or Older 0 0 0 0 0 11 12 13 14 15&or&Older Good at Problem Solving? Do you think
TEST PROJECT MOBILE ROBOTICS FOR JUNIOR
 TEST PROJECT MOBILE ROBOTICS FOR JUNIOR CONTENTS This Test Project proposal consists of the following documentation/files: 1. DESCRIPTION OF PROJECT AND TASKS DOCUMENTATION The JUNIOR challenge of Mobile
TEST PROJECT MOBILE ROBOTICS FOR JUNIOR CONTENTS This Test Project proposal consists of the following documentation/files: 1. DESCRIPTION OF PROJECT AND TASKS DOCUMENTATION The JUNIOR challenge of Mobile
Proseminar Roboter und Aktivmedien. Outline of today s lecture. Acknowledgments. Educational robots achievements and challenging
 Proseminar Roboter und Aktivmedien Educational robots achievements and challenging Lecturer Lecturer Houxiang Houxiang Zhang Zhang TAMS, TAMS, Department Department of of Informatics Informatics University
Proseminar Roboter und Aktivmedien Educational robots achievements and challenging Lecturer Lecturer Houxiang Houxiang Zhang Zhang TAMS, TAMS, Department Department of of Informatics Informatics University
Inspiring Creative Fun Ysbrydoledig Creadigol Hwyl. LEGO Bowling Workbook
 Inspiring Creative Fun Ysbrydoledig Creadigol Hwyl LEGO Bowling Workbook Robots are devices, sometimes they run basic instructions via electric circuitry or on most occasions they can be programmable.
Inspiring Creative Fun Ysbrydoledig Creadigol Hwyl LEGO Bowling Workbook Robots are devices, sometimes they run basic instructions via electric circuitry or on most occasions they can be programmable.
Instructional Technology Center
 Partner Teacher Night March 2017 - Lego WeDo 2.0 What are Lego WeDos? WeDos are lego sets that come with a power source and a motor that allows students to create lego constructions that move like robots.
Partner Teacher Night March 2017 - Lego WeDo 2.0 What are Lego WeDos? WeDos are lego sets that come with a power source and a motor that allows students to create lego constructions that move like robots.
How-to guide. Working with a pre-assembled THz system
 How-to guide 15/06/2016 1 Table of contents 0. Preparation / Basics...3 1. Input beam adjustment...4 2. Working with free space antennas...5 3. Working with fiber-coupled antennas...6 4. Contact details...8
How-to guide 15/06/2016 1 Table of contents 0. Preparation / Basics...3 1. Input beam adjustment...4 2. Working with free space antennas...5 3. Working with fiber-coupled antennas...6 4. Contact details...8
Course: STEM Robotics Engineering Total Framework Hours up to: 600 CIP Code: Exploratory Preparatory
 Camas School District Framework: Introductory Robotics Course: STEM Robotics Engineering Total Framework Hours up to: 600 CIP Code: 150405 Exploratory Preparatory Date Last Modified: 01/20/2013 Career
Camas School District Framework: Introductory Robotics Course: STEM Robotics Engineering Total Framework Hours up to: 600 CIP Code: 150405 Exploratory Preparatory Date Last Modified: 01/20/2013 Career
Subsea Monitoring & Mapping
 Subsea Monitoring & Mapping Arnold Hechanova & Dave Fraser ITAC Meeting 2016 Woods Hole Oceanographic Institute, MA Overview Program Objective: Develop sensors to detect loss of containment subsea and
Subsea Monitoring & Mapping Arnold Hechanova & Dave Fraser ITAC Meeting 2016 Woods Hole Oceanographic Institute, MA Overview Program Objective: Develop sensors to detect loss of containment subsea and
Closed-Loop Transportation Simulation. Outlines
 Closed-Loop Transportation Simulation Deyang Zhao Mentor: Unnati Ojha PI: Dr. Mo-Yuen Chow Aug. 4, 2010 Outlines 1 Project Backgrounds 2 Objectives 3 Hardware & Software 4 5 Conclusions 1 Project Background
Closed-Loop Transportation Simulation Deyang Zhao Mentor: Unnati Ojha PI: Dr. Mo-Yuen Chow Aug. 4, 2010 Outlines 1 Project Backgrounds 2 Objectives 3 Hardware & Software 4 5 Conclusions 1 Project Background
Artificial Intelligence Planning and Decision Making
 Artificial Intelligence Planning and Decision Making NXT robots co-operating in problem solving authors: Lior Russo, Nir Schwartz, Yakov Levy Introduction: On today s reality the subject of artificial
Artificial Intelligence Planning and Decision Making NXT robots co-operating in problem solving authors: Lior Russo, Nir Schwartz, Yakov Levy Introduction: On today s reality the subject of artificial
COMPETITION RULES. Last Revised: January 11 th, Table of Contents
 COMPETITION RULES Last Revised: January 11 th, 2015 Table of Contents 1.0 THE COMPETITION... 2 2.0 PARTICIPATION RULES... 3 2.1 Team Registration... 3 2.2 The Challenges... 4 2.3 The Technical Component...
COMPETITION RULES Last Revised: January 11 th, 2015 Table of Contents 1.0 THE COMPETITION... 2 2.0 PARTICIPATION RULES... 3 2.1 Team Registration... 3 2.2 The Challenges... 4 2.3 The Technical Component...
A LARGE COMBINATION HORIZONTAL AND VERTICAL NEAR FIELD MEASUREMENT FACILITY FOR SATELLITE ANTENNA CHARACTERIZATION
 A LARGE COMBINATION HORIZONTAL AND VERTICAL NEAR FIELD MEASUREMENT FACILITY FOR SATELLITE ANTENNA CHARACTERIZATION John Demas Nearfield Systems Inc. 1330 E. 223rd Street Bldg. 524 Carson, CA 90745 USA
A LARGE COMBINATION HORIZONTAL AND VERTICAL NEAR FIELD MEASUREMENT FACILITY FOR SATELLITE ANTENNA CHARACTERIZATION John Demas Nearfield Systems Inc. 1330 E. 223rd Street Bldg. 524 Carson, CA 90745 USA
Multi-Agent Robotics with GPS Navigation
 Jay Joshi Edison High School 50 Boulevard of the Eagles Edison, NJ 08817 Multi-Agent Robotics with GPS Navigation Abstract The GPS Navigation project is a multi-agent robotics project. A GPS Navigation
Jay Joshi Edison High School 50 Boulevard of the Eagles Edison, NJ 08817 Multi-Agent Robotics with GPS Navigation Abstract The GPS Navigation project is a multi-agent robotics project. A GPS Navigation
2.4 Sensorized robots
 66 Chap. 2 Robotics as learning object 2.4 Sensorized robots 2.4.1 Introduction The main objectives (competences or skills to be acquired) behind the problems presented in this section are: - The students
66 Chap. 2 Robotics as learning object 2.4 Sensorized robots 2.4.1 Introduction The main objectives (competences or skills to be acquired) behind the problems presented in this section are: - The students
Sensors. human sensing. basic sensory. advanced sensory. 5+N senses <link> tactile touchless (distant) virtual. e.g. camera, radar / lidar, MS Kinect
 virtual. e.g. camera, radar / lidar, MS Kinect") Sensors human sensing 5+N senses basic sensory tactile touchless (distant) virtual advanced sensory e.g. camera, radar / lidar, MS Kinect Human senses Traditional sight smell taste touch hearing
Sensors human sensing 5+N senses basic sensory tactile touchless (distant) virtual advanced sensory e.g. camera, radar / lidar, MS Kinect Human senses Traditional sight smell taste touch hearing
INTRODUCTION TO ROBOTICS
 INTRODUCTION TO ROBOTICS ROBOTICS CLUB SCIENCE AND TECHNOLOGY COUNCIL, IIT-KANPUR AUGUST 6 TH, 2016 OUTLINE What is a robot? Classifications of Robots What goes behind making a robot? Mechanical Electrical
INTRODUCTION TO ROBOTICS ROBOTICS CLUB SCIENCE AND TECHNOLOGY COUNCIL, IIT-KANPUR AUGUST 6 TH, 2016 OUTLINE What is a robot? Classifications of Robots What goes behind making a robot? Mechanical Electrical
Multi-Robot Cooperative System For Object Detection
 Multi-Robot Cooperative System For Object Detection Duaa Abdel-Fattah Mehiar AL-Khawarizmi international collage Duaa.mehiar@kawarizmi.com Abstract- The present study proposes a multi-agent system based
Multi-Robot Cooperative System For Object Detection Duaa Abdel-Fattah Mehiar AL-Khawarizmi international collage Duaa.mehiar@kawarizmi.com Abstract- The present study proposes a multi-agent system based
Robot Programming Manual
 2 T Program Robot Programming Manual Two sensor, line-following robot design using the LEGO NXT Mindstorm kit. The RoboRAVE International is an annual robotics competition held in Albuquerque, New Mexico,
2 T Program Robot Programming Manual Two sensor, line-following robot design using the LEGO NXT Mindstorm kit. The RoboRAVE International is an annual robotics competition held in Albuquerque, New Mexico,
Preliminary Design Review
 Proximity Identification, characterization, And Neutralization by thinking before Acquisition (PIRANHA) Preliminary Design Review Customer: Barbara Bicknell Jeffrey Weber Team: Aaron Buysse Kevin Rauhauser
Proximity Identification, characterization, And Neutralization by thinking before Acquisition (PIRANHA) Preliminary Design Review Customer: Barbara Bicknell Jeffrey Weber Team: Aaron Buysse Kevin Rauhauser
LEGO BASED CHALLENGE. 1. Material
 LEGO BASED CHALLENGE 1. Material 1. The controller, motors and sensors used to assemble robots must be from LEGO MINDSTORMS sets (NXT or EV3). 2. Only LEGO branded elements may be used to construct the
LEGO BASED CHALLENGE 1. Material 1. The controller, motors and sensors used to assemble robots must be from LEGO MINDSTORMS sets (NXT or EV3). 2. Only LEGO branded elements may be used to construct the
UNLV ME 425/625 Robotics. Introduction and Course Philosophy
 UNLV ME 425/625 Robotics Introduction and Course Philosophy Paul Oh: Background 5+ years industry before Drexel ME Professor since 2000 Advisor: ASME 10-years Advisor: 8+ SD teams 3 SD awards (COE, ASME,
UNLV ME 425/625 Robotics Introduction and Course Philosophy Paul Oh: Background 5+ years industry before Drexel ME Professor since 2000 Advisor: ASME 10-years Advisor: 8+ SD teams 3 SD awards (COE, ASME,
DEVELOPMENT OF A ROBOID COMPONENT FOR PLAYER/STAGE ROBOT SIMULATOR
 Proceedings of IC-NIDC2009 DEVELOPMENT OF A ROBOID COMPONENT FOR PLAYER/STAGE ROBOT SIMULATOR Jun Won Lim 1, Sanghoon Lee 2,Il Hong Suh 1, and Kyung Jin Kim 3 1 Dept. Of Electronics and Computer Engineering,
Proceedings of IC-NIDC2009 DEVELOPMENT OF A ROBOID COMPONENT FOR PLAYER/STAGE ROBOT SIMULATOR Jun Won Lim 1, Sanghoon Lee 2,Il Hong Suh 1, and Kyung Jin Kim 3 1 Dept. Of Electronics and Computer Engineering,
acknowledgments...xv introduction...xvii 1 LEGO MINDSTORMS NXT 2.0: people, pieces, and potential getting started with the NXT 2.0 set...
 acknowledgments...xv introduction...xvii about this book...xvii part I: introduction to LEGO MINDSTORMS NXT 2.0...xviii part II: building...xviii part III: programming...xviii part IV: projects...xix companion
acknowledgments...xv introduction...xvii about this book...xvii part I: introduction to LEGO MINDSTORMS NXT 2.0...xviii part II: building...xviii part III: programming...xviii part IV: projects...xix companion
University of Toronto. Companion Robot Security. ECE1778 Winter Wei Hao Chang Apper Alexander Hong Programmer
 University of Toronto Companion ECE1778 Winter 2015 Creative Applications for Mobile Devices Wei Hao Chang Apper Alexander Hong Programmer April 9, 2015 Contents 1 Introduction 3 1.1 Problem......................................
University of Toronto Companion ECE1778 Winter 2015 Creative Applications for Mobile Devices Wei Hao Chang Apper Alexander Hong Programmer April 9, 2015 Contents 1 Introduction 3 1.1 Problem......................................
Senior Design I. Fast Acquisition and Real-time Tracking Vehicle. University of Central Florida
 Senior Design I Fast Acquisition and Real-time Tracking Vehicle University of Central Florida College of Engineering Department of Electrical Engineering Inventors: Seth Rhodes Undergraduate B.S.E.E. Houman
Senior Design I Fast Acquisition and Real-time Tracking Vehicle University of Central Florida College of Engineering Department of Electrical Engineering Inventors: Seth Rhodes Undergraduate B.S.E.E. Houman
2018 First Responders 4-H Robotics Challenge Page 1
 2018 First Responders 4-H Robotics Challenge Page 1 Contents 2018 First Responders 4-H Robotics Challenge... 3 1 Teams... 3 2 The Game... 3 2.1 Competition kit... 3 2.2 Field Mat... 3 2.3 Playing Field...
2018 First Responders 4-H Robotics Challenge Page 1 Contents 2018 First Responders 4-H Robotics Challenge... 3 1 Teams... 3 2 The Game... 3 2.1 Competition kit... 3 2.2 Field Mat... 3 2.3 Playing Field...
MADISON PUBLIC SCHOOL DISTRICT. GRADE 7 Robotics Cycle
 MADISON PUBLIC SCHOOL DISTRICT GRADE 7 Robotics Cycle Authored by: Erik Lih Richard Newbery Reviewed by: Lee Nittel Director of Curriculum and Instruction Tom Paterson K12 Supervisor of Science and Technology
MADISON PUBLIC SCHOOL DISTRICT GRADE 7 Robotics Cycle Authored by: Erik Lih Richard Newbery Reviewed by: Lee Nittel Director of Curriculum and Instruction Tom Paterson K12 Supervisor of Science and Technology
ADALAM Sensor based adaptive laser micromachining using ultrashort pulse lasers for zero-failure manufacturing D2.2. Ger Folkersma (Demcon)
") D2.2 Automatic adjustable reference path system Document Coordinator: Contributors: Dissemination: Keywords: Ger Folkersma (Demcon) Ger Folkersma, Kevin Voss, Marvin Klein (Demcon) Public Reference path,
D2.2 Automatic adjustable reference path system Document Coordinator: Contributors: Dissemination: Keywords: Ger Folkersma (Demcon) Ger Folkersma, Kevin Voss, Marvin Klein (Demcon) Public Reference path,
Low-Cost hardware connectivity with Simulink MATLAB-Day RWTH Aachen Sebastian Groß October 24th, 2013
 Low-Cost hardware connectivity with Simulink MATLAB-Day RWTH Aachen Sebastian Groß October 24th, 2013 2013 The MathWorks, Inc. 1 LEGO Mindstorms NXT: a first demo EDUCON 2013, Berlin, Germany 2 A first
Low-Cost hardware connectivity with Simulink MATLAB-Day RWTH Aachen Sebastian Groß October 24th, 2013 2013 The MathWorks, Inc. 1 LEGO Mindstorms NXT: a first demo EDUCON 2013, Berlin, Germany 2 A first
Automata Depository Model with Autonomous Robots
 Acta Cybernetica 19 (2010) 655 660. Automata Depository Model with Autonomous Robots Zoltán Szabó, Balázs Lájer, and Ágnes Werner-Stark Abstract One of the actual topics on robotis research in the recent
Acta Cybernetica 19 (2010) 655 660. Automata Depository Model with Autonomous Robots Zoltán Szabó, Balázs Lájer, and Ágnes Werner-Stark Abstract One of the actual topics on robotis research in the recent
Available theses in robotics (March 2018) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin
 Prof. Paolo Rocco Prof. Andrea Maria Zanchettin") Available theses in robotics (March 2018) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Ergonomic positioning of bulky objects Thesis 1 Robot acts as a 3rd hand for workpiece positioning: Muscular fatigue
Available theses in robotics (March 2018) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Ergonomic positioning of bulky objects Thesis 1 Robot acts as a 3rd hand for workpiece positioning: Muscular fatigue
RCJ Rescue B. RCJ Rescue B Primary Team Branchburg, NJ USA. Storming Robots in Branchburg, NJ, USA. SR-chitect / Storming Robots
 RCJ Rescue B RCJ Rescue B Primary Team Branchburg, NJ USA Storming Robots in Branchburg, NJ, USA 1 TEAM MEMBERS - BIOS 2 Andre Gou (captain) 13 years old Has done robotics for around 4-5 years Shall be
RCJ Rescue B RCJ Rescue B Primary Team Branchburg, NJ USA Storming Robots in Branchburg, NJ, USA 1 TEAM MEMBERS - BIOS 2 Andre Gou (captain) 13 years old Has done robotics for around 4-5 years Shall be
Robotics using Lego Mindstorms EV3 (Intermediate)
") Robotics using Lego Mindstorms EV3 (Intermediate) Facebook.com/roboticsgateway @roboticsgateway Robotics using EV3 Are we ready to go Roboticists? Does each group have at least one laptop? Do you have
Robotics using Lego Mindstorms EV3 (Intermediate) Facebook.com/roboticsgateway @roboticsgateway Robotics using EV3 Are we ready to go Roboticists? Does each group have at least one laptop? Do you have
Flowcharts and Programs
 Flowcharts and Programs Engineering with Labview Laptop Program Schematic Editor Front Panel & Block Diagram Block Diagram: Program Code Front Panel: Virtual Dashboard Front Panel Block Diagram
Flowcharts and Programs Engineering with Labview Laptop Program Schematic Editor Front Panel & Block Diagram Block Diagram: Program Code Front Panel: Virtual Dashboard Front Panel Block Diagram
Robotics Challenge. Team Members Tyler Quintana Tyler Gus Josh Cogdill Raul Davila John Augustine Kelty Tobin
 Robotics Challenge Team Members Tyler Quintana Tyler Gus Josh Cogdill Raul Davila John Augustine Kelty Tobin 1 Robotics Challenge: Team Multidisciplinary: Computer, Electrical, Mechanical Currently split
Robotics Challenge Team Members Tyler Quintana Tyler Gus Josh Cogdill Raul Davila John Augustine Kelty Tobin 1 Robotics Challenge: Team Multidisciplinary: Computer, Electrical, Mechanical Currently split
Difrotec Product & Services. Ultra high accuracy interferometry & custom optical solutions
 Difrotec Product & Services Ultra high accuracy interferometry & custom optical solutions Content 1. Overview 2. Interferometer D7 3. Benefits 4. Measurements 5. Specifications 6. Applications 7. Cases
Difrotec Product & Services Ultra high accuracy interferometry & custom optical solutions Content 1. Overview 2. Interferometer D7 3. Benefits 4. Measurements 5. Specifications 6. Applications 7. Cases
Using Small Affordable Robots for Hybrid Simulation of Wireless Data Access Systems
 Using Small Affordable Robots for Hybrid Simulation of Wireless Data Access Systems Gorka Guerrero, Roberto Yus, and Eduardo Mena IIS Department, University of Zaragoza María de Luna 1, 50018, Zaragoza,
Using Small Affordable Robots for Hybrid Simulation of Wireless Data Access Systems Gorka Guerrero, Roberto Yus, and Eduardo Mena IIS Department, University of Zaragoza María de Luna 1, 50018, Zaragoza,
LEGO MINDSTORMS COMPETITIONS
 LEGO MINDSTORMS COMPETITIONS FIRST LEGO LEAGUE and WORLD ROBOT OLYMPIAD By Sanjay and Arvind Seshan, EV3Lessons.com With information and feedback from Dominic Bruneau (Canada), Nilesh Shah (India), Atul
LEGO MINDSTORMS COMPETITIONS FIRST LEGO LEAGUE and WORLD ROBOT OLYMPIAD By Sanjay and Arvind Seshan, EV3Lessons.com With information and feedback from Dominic Bruneau (Canada), Nilesh Shah (India), Atul
By Pierre Olivier, Vice President, Engineering and Manufacturing, LeddarTech Inc.
 Leddar optical time-of-flight sensing technology, originally discovered by the National Optics Institute (INO) in Quebec City and developed and commercialized by LeddarTech, is a unique LiDAR technology
Leddar optical time-of-flight sensing technology, originally discovered by the National Optics Institute (INO) in Quebec City and developed and commercialized by LeddarTech, is a unique LiDAR technology
Spider Pulse Characterization
 Spider Pulse Characterization Spectral and Temporal Characterization of Ultrashort Laser Pulses The Spider series by APE is an all-purpose and frequently used solution for complete characterization of
Spider Pulse Characterization Spectral and Temporal Characterization of Ultrashort Laser Pulses The Spider series by APE is an all-purpose and frequently used solution for complete characterization of
A Lego-Based Soccer-Playing Robot Competition For Teaching Design
 Session 2620 A Lego-Based Soccer-Playing Robot Competition For Teaching Design Ronald A. Lessard Norwich University Abstract Course Objectives in the ME382 Instrumentation Laboratory at Norwich University
Session 2620 A Lego-Based Soccer-Playing Robot Competition For Teaching Design Ronald A. Lessard Norwich University Abstract Course Objectives in the ME382 Instrumentation Laboratory at Norwich University
Overview of Challenges in the Development of Autonomous Mobile Robots. August 23, 2011
 Overview of Challenges in the Development of Autonomous Mobile Robots August 23, 2011 What is in a Robot? Sensors Effectors and actuators (i.e., mechanical) Used for locomotion and manipulation Controllers
Overview of Challenges in the Development of Autonomous Mobile Robots August 23, 2011 What is in a Robot? Sensors Effectors and actuators (i.e., mechanical) Used for locomotion and manipulation Controllers
WELCOME TO THE SEMINAR ON INTRODUCTION TO ROBOTICS
 WELCOME TO THE SEMINAR ON INTRODUCTION TO ROBOTICS Introduction to ROBOTICS Get started with working with Electronic circuits. Helping in building a basic line follower Understanding more about sensors
WELCOME TO THE SEMINAR ON INTRODUCTION TO ROBOTICS Introduction to ROBOTICS Get started with working with Electronic circuits. Helping in building a basic line follower Understanding more about sensors
A Turnkey Weld Inspection Solution Combining PAUT & TOFD
 A Turnkey Weld Inspection Solution Combining PAUT & TOFD INTRODUCTION With the recent evolutions of the codes & standards, the replacement of conventional film radiography with advanced ultrasonic testing
A Turnkey Weld Inspection Solution Combining PAUT & TOFD INTRODUCTION With the recent evolutions of the codes & standards, the replacement of conventional film radiography with advanced ultrasonic testing
HOLY ANGEL UNIVERSITY COLLEGE OF INFORMATION AND COMMUNICATIONS TECHNOLOGY ROBOT MODELING AND PROGRAMMING COURSE SYLLABUS
 HOLY ANGEL UNIVERSITY COLLEGE OF INFORMATION AND COMMUNICATIONS TECHNOLOGY ROBOT MODELING AND PROGRAMMING COURSE SYLLABUS Code : 6ROBOTMOD Prerequisite : 6ARTINTEL Credit : 3 s (3 hours LAB) Year Level:
HOLY ANGEL UNIVERSITY COLLEGE OF INFORMATION AND COMMUNICATIONS TECHNOLOGY ROBOT MODELING AND PROGRAMMING COURSE SYLLABUS Code : 6ROBOTMOD Prerequisite : 6ARTINTEL Credit : 3 s (3 hours LAB) Year Level:
AN AUTONOMOUS APPROACH TO WHEEL CHANGING PROBLEM
 STUDIA UNIV. BABEŞ BOLYAI, INFORMATICA, Volume LV, Number 1, 2010 AN AUTONOMOUS APPROACH TO WHEEL CHANGING PROBLEM LIVIU ŞTIRB, ZSUZSANNA MARIAN, AND MIHAI OLTEAN Abstract. We describe a self-repairing
STUDIA UNIV. BABEŞ BOLYAI, INFORMATICA, Volume LV, Number 1, 2010 AN AUTONOMOUS APPROACH TO WHEEL CHANGING PROBLEM LIVIU ŞTIRB, ZSUZSANNA MARIAN, AND MIHAI OLTEAN Abstract. We describe a self-repairing
BudE: Assistant to Parent a Child
 BudE: Assistant to Parent a Child Erick Bu Pons, Mario Aranega, Melissa Morris, Sabri Tosunoglu Department of Mechanical and Materials Engineering Florida International University Miami, Florida 33174
BudE: Assistant to Parent a Child Erick Bu Pons, Mario Aranega, Melissa Morris, Sabri Tosunoglu Department of Mechanical and Materials Engineering Florida International University Miami, Florida 33174
TUTA/IOE/PCU All rights reserved. Printed in Nepal Fax: My First Humanoid Robot An Experience worth Sharing with Freshmen and Sophomore
 64 Journal of the Institute of the Engineering TUTA/IOE/PCU Journal of the Institute of Engineering, Vol. 8, No. 1, pp. 64 70 TUTA/IOE/PCU All rights reserved. Printed in Nepal Fax: 977-1-5525830 My First
64 Journal of the Institute of the Engineering TUTA/IOE/PCU Journal of the Institute of Engineering, Vol. 8, No. 1, pp. 64 70 TUTA/IOE/PCU All rights reserved. Printed in Nepal Fax: 977-1-5525830 My First
Making Industries Smarter
 Making Industries Smarter The Next Generation of Photoelectronic Sensors Sensors are the most important components of machines. Dr. Alexander Ohl Director of Development, wenglor sensoric Technology Communication
Making Industries Smarter The Next Generation of Photoelectronic Sensors Sensors are the most important components of machines. Dr. Alexander Ohl Director of Development, wenglor sensoric Technology Communication
More Info at Open Access Database by S. Dutta and T. Schmidt
 More Info at Open Access Database www.ndt.net/?id=17657 New concept for higher Robot position accuracy during thermography measurement to be implemented with the existing prototype automated thermography
More Info at Open Access Database www.ndt.net/?id=17657 New concept for higher Robot position accuracy during thermography measurement to be implemented with the existing prototype automated thermography
understanding sensors
 The LEGO MINDSTORMS EV3 set includes three types of sensors: Touch, Color, and Infrared. You can use these sensors to make your robot respond to its environment. For example, you can program your robot
The LEGO MINDSTORMS EV3 set includes three types of sensors: Touch, Color, and Infrared. You can use these sensors to make your robot respond to its environment. For example, you can program your robot
Competition Arena Rules Revised March 21, 2017
 Competition Arena Rules Revised March 21, 2017 General Rules GR1 Only one robot per team will be allowed in the tournament. Backup robots will NOT be allowed. Teams found in violation will not be allowed
Competition Arena Rules Revised March 21, 2017 General Rules GR1 Only one robot per team will be allowed in the tournament. Backup robots will NOT be allowed. Teams found in violation will not be allowed
Hardware Implementation of an Explorer Bot Using XBEE & GSM Technology
 Volume 118 No. 20 2018, 4337-4342 ISSN: 1314-3395 (on-line version) url: http://www.ijpam.eu ijpam.eu Hardware Implementation of an Explorer Bot Using XBEE & GSM Technology M. V. Sai Srinivas, K. Yeswanth,
Volume 118 No. 20 2018, 4337-4342 ISSN: 1314-3395 (on-line version) url: http://www.ijpam.eu ijpam.eu Hardware Implementation of an Explorer Bot Using XBEE & GSM Technology M. V. Sai Srinivas, K. Yeswanth,
Start a Robotics Elective at Your School
 Start a Robotics Elective at Your School Linda Reynolds, teckteacher@yahoo.com Reggie Clark, reginald.clark@ususd.us Jonathan Reynolds, chaplare@gmail.com Desert Robotics: Teams 08-0083; 08-0086; 08-0087;
Start a Robotics Elective at Your School Linda Reynolds, teckteacher@yahoo.com Reggie Clark, reginald.clark@ususd.us Jonathan Reynolds, chaplare@gmail.com Desert Robotics: Teams 08-0083; 08-0086; 08-0087;
Team Project: A Surveillant Robot System
 Team Project: A Surveillant Robot System SW & HW Test Plan Little Red Team Chankyu Park (Michel) Seonah Lee (Sarah) Qingyuan Shi (Lisa) Chengzhou Li JunMei Li Kai Lin Software Lists SW Lists for Surveillant
Team Project: A Surveillant Robot System SW & HW Test Plan Little Red Team Chankyu Park (Michel) Seonah Lee (Sarah) Qingyuan Shi (Lisa) Chengzhou Li JunMei Li Kai Lin Software Lists SW Lists for Surveillant
Robotics will be very important for the humanity in the next 10 years and this ebook is an effort to help in this way.
 1.- Introduction 1.1.- Goals Many developers around the world choose lejos, Java for Lego Mindstorm, as the main platform to develop robots with NXT Lego Mindstorm. I consider that this ebook will help
1.- Introduction 1.1.- Goals Many developers around the world choose lejos, Java for Lego Mindstorm, as the main platform to develop robots with NXT Lego Mindstorm. I consider that this ebook will help
Design & Development of a Robotic System Using LEGO Mindstorm
 Design & Development of a Robotic System Using LEGO Mindstorm Nurulfajar bin Abd Manap 1, Sani Irwan Md Salim 1 Nor Zaidi bin Haron 1 Faculty of Electronic and Computer Engineering (KUTKM) ABSTRACT This
Design & Development of a Robotic System Using LEGO Mindstorm Nurulfajar bin Abd Manap 1, Sani Irwan Md Salim 1 Nor Zaidi bin Haron 1 Faculty of Electronic and Computer Engineering (KUTKM) ABSTRACT This
Development of a Novel Zero-Turn-Radius Autonomous Vehicle
 Development of a Novel Zero-Turn-Radius Autonomous Vehicle by Charles Dean Haynie Thesis submitted to the Faculty of the Virginia Polytechnic Institute and State University in partial fulfillment of the
Development of a Novel Zero-Turn-Radius Autonomous Vehicle by Charles Dean Haynie Thesis submitted to the Faculty of the Virginia Polytechnic Institute and State University in partial fulfillment of the
Sumo-bot Competition Rules
 Sumo-bot Competition Rules Location: Guadalupe County Agricultural Extension Office, 210 Live Oak, Seguin, TX 78155 Date and Time: December 2, 2017 from 9-2 PM doors open at 9AM Check in and Inspections:
Sumo-bot Competition Rules Location: Guadalupe County Agricultural Extension Office, 210 Live Oak, Seguin, TX 78155 Date and Time: December 2, 2017 from 9-2 PM doors open at 9AM Check in and Inspections:
A Low Power Optical Communication Instrument for Deep-Space CubeSats. Paul Serra, CubeSat Developers Workshop, 2015 v1.5
 A Low Power Optical Communication Instrument for Deep-Space CubeSats Paul Serra, Nathan Barnwell, John W. Conklin Paul Serra, CubeSat Developers Workshop, 2015 v1.5 Motivation and Objectives Objectives:
A Low Power Optical Communication Instrument for Deep-Space CubeSats Paul Serra, Nathan Barnwell, John W. Conklin Paul Serra, CubeSat Developers Workshop, 2015 v1.5 Motivation and Objectives Objectives:
Keysight Technologies Using a Wide-band Tunable Laser for Optical Filter Measurements
 Keysight Technologies Using a Wide-band Tunable Laser for Optical Filter Measurements Article Reprint NASA grants Keysight Technologies permission to distribute the article Using a Wide-band Tunable Laser
Keysight Technologies Using a Wide-band Tunable Laser for Optical Filter Measurements Article Reprint NASA grants Keysight Technologies permission to distribute the article Using a Wide-band Tunable Laser
The Nomenclature and Geometry of LEGO
 The Nomenclature and Geometry of LEGO AN OVERVIEW OF LEGO EV3 MINDSTORMS ELEMENTS AND HOW THEY WORK TOGETHER UPDATED 9/27/2015 Required Stuff Please do not wander the building. Rest Rooms Location. Food
The Nomenclature and Geometry of LEGO AN OVERVIEW OF LEGO EV3 MINDSTORMS ELEMENTS AND HOW THEY WORK TOGETHER UPDATED 9/27/2015 Required Stuff Please do not wander the building. Rest Rooms Location. Food
Image 1, Ref - see slide WHAT IS A ROBOT? A look at characteristics of robots using the LEGO EV3 as a specific example (50 minutes)
") 1 Image 1, Ref - see slide 17-18 WHAT IS A ROBOT? A look at characteristics of robots using the LEGO EV3 as a specific example (50 minutes) PRE/POST-ASSESSMENT SHEET - What is a robot? 1. Describe in one
1 Image 1, Ref - see slide 17-18 WHAT IS A ROBOT? A look at characteristics of robots using the LEGO EV3 as a specific example (50 minutes) PRE/POST-ASSESSMENT SHEET - What is a robot? 1. Describe in one
NXT Amazing Rules USU Physics Day Lagoon Farmington, UT
 NXT Amazing Rules USU Physics Day Lagoon Farmington, UT May 17, 2013 COMPETITION OBJECTIVE The aim of the competition is to foster math, science, engineering and team work in students in 5 th grade. DESIGN
NXT Amazing Rules USU Physics Day Lagoon Farmington, UT May 17, 2013 COMPETITION OBJECTIVE The aim of the competition is to foster math, science, engineering and team work in students in 5 th grade. DESIGN
INTERACTIVE BUILDING BLOCK SYSTEMS
 INTERACTIVE BUILDING BLOCK SYSTEMS CONTENTS About UBTECH ROBOTICS CORP Toy s Revolution What is Jimu Robot What it Comes With 3 Step Learning Play Build Program Share Jimu Robot Available Kits Dream With
INTERACTIVE BUILDING BLOCK SYSTEMS CONTENTS About UBTECH ROBOTICS CORP Toy s Revolution What is Jimu Robot What it Comes With 3 Step Learning Play Build Program Share Jimu Robot Available Kits Dream With
CS8678_L1. Course Introduction. CS 8678 Introduction to Robotics & AI Dr. Ken Hoganson. Start Momentarily
 Class Will CS8678_L1 Course Introduction CS 8678 Introduction to Robotics & AI Dr. Ken Hoganson Start Momentarily Contents Overview of syllabus (insert from web site) Description Textbook Mindstorms NXT
Class Will CS8678_L1 Course Introduction CS 8678 Introduction to Robotics & AI Dr. Ken Hoganson Start Momentarily Contents Overview of syllabus (insert from web site) Description Textbook Mindstorms NXT
AN HYBRID LOCOMOTION SERVICE ROBOT FOR INDOOR SCENARIOS 1
 AN HYBRID LOCOMOTION SERVICE ROBOT FOR INDOOR SCENARIOS 1 Jorge Paiva Luís Tavares João Silva Sequeira Institute for Systems and Robotics Institute for Systems and Robotics Instituto Superior Técnico,
AN HYBRID LOCOMOTION SERVICE ROBOT FOR INDOOR SCENARIOS 1 Jorge Paiva Luís Tavares João Silva Sequeira Institute for Systems and Robotics Institute for Systems and Robotics Instituto Superior Técnico,
Intelligent interaction
 BionicWorkplace: autonomously learning workstation for human-machine collaboration Intelligent interaction Face to face, hand in hand. The BionicWorkplace shows the extent to which human-machine collaboration
BionicWorkplace: autonomously learning workstation for human-machine collaboration Intelligent interaction Face to face, hand in hand. The BionicWorkplace shows the extent to which human-machine collaboration
SMART CITY TECH WORKSHOPS
 1 SMART CITY TECH WORKSHOPS After the conference, the following day will be dedicated to a series of workshops that provide in-depth training on the latest technology necessary for building smart city
1 SMART CITY TECH WORKSHOPS After the conference, the following day will be dedicated to a series of workshops that provide in-depth training on the latest technology necessary for building smart city
Built-in soft-start feature. Up-Slope and Down-Slope. Power-Up safe start feature. Motor will only start if pulse of 1.5ms is detected.
 Thank You for purchasing our TRI-Mode programmable DC Motor Controller. Our DC Motor Controller is the most flexible controller you will find. It is user-programmable and covers most applications. This
Thank You for purchasing our TRI-Mode programmable DC Motor Controller. Our DC Motor Controller is the most flexible controller you will find. It is user-programmable and covers most applications. This
Optical generation of frequency stable mm-wave radiation using diode laser pumped Nd:YAG lasers
 Optical generation of frequency stable mm-wave radiation using diode laser pumped Nd:YAG lasers T. Day and R. A. Marsland New Focus Inc. 340 Pioneer Way Mountain View CA 94041 (415) 961-2108 R. L. Byer
Optical generation of frequency stable mm-wave radiation using diode laser pumped Nd:YAG lasers T. Day and R. A. Marsland New Focus Inc. 340 Pioneer Way Mountain View CA 94041 (415) 961-2108 R. L. Byer
Sensors & Systems for Human Safety Assurance in Collaborative Exploration
 Sensing and Sensors CMU SCS RI 16-722 S09 Ned Fox nfox@andrew.cmu.edu Outline What is collaborative exploration? Humans sensing robots Robots sensing humans Overseers sensing both Inherently safe systems
Sensing and Sensors CMU SCS RI 16-722 S09 Ned Fox nfox@andrew.cmu.edu Outline What is collaborative exploration? Humans sensing robots Robots sensing humans Overseers sensing both Inherently safe systems
For Experimenters and Educators
 For Experimenters and Educators ARobot (pronounced "A robot") is a computer controlled mobile robot designed for Experimenters and Educators. Ages 14 and up (younger with help) can enjoy unlimited experimentation
For Experimenters and Educators ARobot (pronounced "A robot") is a computer controlled mobile robot designed for Experimenters and Educators. Ages 14 and up (younger with help) can enjoy unlimited experimentation
TU Graz Robotics Challenge 2017
 1 TU Graz Robotics Challenge W I S S E N T E C H N I K L E I D E N S C H A F T TU Graz Robotics Challenge 2017 www.robotics-challenge.ist.tugraz.at Kick-Off 14.03.2017 u www.tugraz.at 2 Overview Introduction
1 TU Graz Robotics Challenge W I S S E N T E C H N I K L E I D E N S C H A F T TU Graz Robotics Challenge 2017 www.robotics-challenge.ist.tugraz.at Kick-Off 14.03.2017 u www.tugraz.at 2 Overview Introduction
Special Sensor Report: CMUcam Vision Board
 Student Name: William Dubel TA : Uriel Rodriguez Louis Brandy Instructor. A. A Arroyo University of Florida Department of Electrical and Computer Engineering EEL 5666 Intelligent Machines Design Laboratory
Student Name: William Dubel TA : Uriel Rodriguez Louis Brandy Instructor. A. A Arroyo University of Florida Department of Electrical and Computer Engineering EEL 5666 Intelligent Machines Design Laboratory
Hi everyone. educational environment based on team work that nurtures creativity and innovation preparing them for a world of increasing
 Hi everyone I would like to introduce myself and the Robotics program to all new and existing families. I teach Robotics to all of your children for an hour every fortnight. Robotics is a relatively new
Hi everyone I would like to introduce myself and the Robotics program to all new and existing families. I teach Robotics to all of your children for an hour every fortnight. Robotics is a relatively new
Make Lego And Arduino Projects Projects For Extending Mindstorms Nxt With Open Source Electronics
 Make Lego And Arduino Projects Projects For Extending Mindstorms Nxt With Open Source Electronics We have made it easy for you to find a PDF Ebooks without any digging. And by having access to our ebooks
Make Lego And Arduino Projects Projects For Extending Mindstorms Nxt With Open Source Electronics We have made it easy for you to find a PDF Ebooks without any digging. And by having access to our ebooks
LDOR: Laser Directed Object Retrieving Robot. Final Report
 University of Florida Department of Electrical and Computer Engineering EEL 5666 Intelligent Machines Design Laboratory LDOR: Laser Directed Object Retrieving Robot Final Report 4/22/08 Mike Arms TA: Mike
University of Florida Department of Electrical and Computer Engineering EEL 5666 Intelligent Machines Design Laboratory LDOR: Laser Directed Object Retrieving Robot Final Report 4/22/08 Mike Arms TA: Mike
OMRON APPLICATION NOTE
 OMRON APPLICATION NOTE Automatic PID Selection for E5_N-H and E5_N-HT Temperature Controllers This document explains: Parameters used for automatic PID selection Provides application examples using Analog
OMRON APPLICATION NOTE Automatic PID Selection for E5_N-H and E5_N-HT Temperature Controllers This document explains: Parameters used for automatic PID selection Provides application examples using Analog
Motion Control of a Three Active Wheeled Mobile Robot and Collision-Free Human Following Navigation in Outdoor Environment
 Proceedings of the International MultiConference of Engineers and Computer Scientists 2016 Vol I,, March 16-18, 2016, Hong Kong Motion Control of a Three Active Wheeled Mobile Robot and Collision-Free
Proceedings of the International MultiConference of Engineers and Computer Scientists 2016 Vol I,, March 16-18, 2016, Hong Kong Motion Control of a Three Active Wheeled Mobile Robot and Collision-Free
APAS assistant. Product scope
 APAS assistant Product scope APAS assistant Table of contents Non-contact human-robot collaboration for the Smart Factory Robots have improved the working world in the past years in many ways. Above and
APAS assistant Product scope APAS assistant Table of contents Non-contact human-robot collaboration for the Smart Factory Robots have improved the working world in the past years in many ways. Above and
Trade of Sheet Metalwork. Module 7: Introduction to CNC Sheet Metal Manufacturing Unit 2: CNC Machines Phase 2
 Trade of Sheet Metalwork Module 7: Introduction to CNC Sheet Metal Manufacturing Unit 2: CNC Machines Phase 2 Table of Contents List of Figures... 4 List of Tables... 5 Document Release History... 6 Module
Trade of Sheet Metalwork Module 7: Introduction to CNC Sheet Metal Manufacturing Unit 2: CNC Machines Phase 2 Table of Contents List of Figures... 4 List of Tables... 5 Document Release History... 6 Module
A New Simulator for Botball Robots
 A New Simulator for Botball Robots Stephen Carlson Montgomery Blair High School (Lockheed Martin Exploring Post 10-0162) 1 Introduction A New Simulator for Botball Robots Simulation is important when designing
A New Simulator for Botball Robots Stephen Carlson Montgomery Blair High School (Lockheed Martin Exploring Post 10-0162) 1 Introduction A New Simulator for Botball Robots Simulation is important when designing
GRAVITY acquisition camera
 GRAVITY acquisition camera Narsireddy Anugu 1, António Amorim, Paulo Garcia, Frank Eisenhauer, Paulo Gordo, Oliver Pfuhl, Ekkehard Wieprecht, Erich Wiezorrek, Marcus Haug, Guy S. Perrin, Karine Perraut,
GRAVITY acquisition camera Narsireddy Anugu 1, António Amorim, Paulo Garcia, Frank Eisenhauer, Paulo Gordo, Oliver Pfuhl, Ekkehard Wieprecht, Erich Wiezorrek, Marcus Haug, Guy S. Perrin, Karine Perraut,