Robotics Challenge. Team Members Tyler Quintana Tyler Gus Josh Cogdill Raul Davila John Augustine Kelty Tobin
|
|
|
- Myron Kelley
- 6 years ago
- Views:
Transcription
1 Robotics Challenge Team Members Tyler Quintana Tyler Gus Josh Cogdill Raul Davila John Augustine Kelty Tobin 1
2 Robotics Challenge: Team Multidisciplinary: Computer, Electrical, Mechanical Currently split into 3 subsystems/pairs: Controls and Sensors: Tyler Quintana and Tyler Gus Beacon: Josh Cogdill and Raul Davila Chassis/Mechanical: John Augustine and Kelty Tobin 2
 Must be autonomous - no remote control or GPS 2) Must remain on the ground - no jumping, launching or")
3 Robotics Challenge Tenth annual engineering challenge sponsored by NASA through Colorado Space Grant Consortium held in April Design an autonomous robot to navigate multiple courses at the Great Sand Dunes Natl Park and find a radio beacon, simulating unmanned space exploration Restrictions: 1) Must be autonomous - no remote control or GPS 2) Must remain on the ground - no jumping, launching or flying 3) Must fit into one of two size categories: Division 1: Less than 1.5kg (~3.3lbs) (what we have chosen) Division 2: Less than 4.0kg (~8.8 lbs) 1) Wheelbase may not be longer than 20in and max height may not exceed 30in 2) Maximum $500 budget for final design 3

4 Sensors: *Note: prototyping does not count towards $500 budget 4
5 Controls and Sensors: Tyler Quintana & Tyler Gus 5





6 Planning, Prototyping, & Testing Planning/research: Independent (Kinect, RaspberryPi) Previous Year: Very mechanically focused Arduino, Sharp IR, Ultrasonic Arduino Uno vs. Arduino Mega 2560 Testing Sharp IR sensors: require heavy conditioning of (analog voltage) output Testing MPU-9150: output is very accurate but still requires conditioning 6
 Beacon")
 Primary")

 Pushbuttons on a front")
7 Controls and Sensors The brain: Arduino Mega 2560 (master) Beacon signal receiver: Arduino Fio with XBee module (slave) Primary sensors: Sharp infrared sensors x5 Additional sensors: MPU Axis (gyro, accelerometer, and compass) Pushbuttons on a front bumper 7
8 Next Semester Continue working on sensor input Continue working on integrating with chassis Testing until challenge in April 2016 Refining algorithm 8
9 Beacon: Josh Cogdill & Raul Davila 9
 250 kbps U.")
10 Xbee Specifications Xbee RF (Radio Frequency) module allow machines to communicate with each other wirelessly Range 300 ft (100 m) Power Consumption Frequency v 2.4 GHz Protocol Tx Power Max Data Rate Antenna 1 mw (+0dBm) 250 kbps U.FL Connector 10


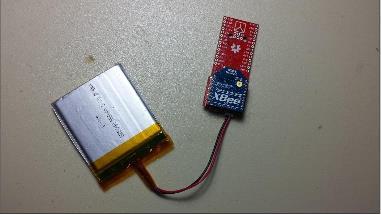
11 Transmitter Transmits the direction it is facing (its heading) to the receiver Transmitting Fio takes the heading from a compass and sends it to the transmitting Xbee which in turn sends it to the receiving Xbee Using the HMC5883L Magnometer as a digital compass, which operates in continuous mode 11

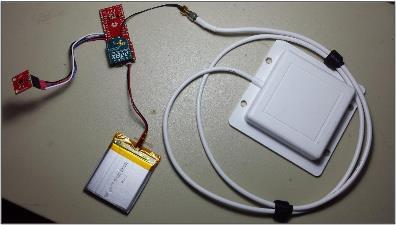
12 Receiver Receives the data (a compass heading) and sends it through serial to whatever device needs that data (in our case the Arduino board) Data is divided by two, making the max value 180, in order to decrease the amount of bits required from transmission The antenna needs to rotate vertically so that the receiver can determine the heading of the beacon relative to the greatest signal strength Without varying the signal like so, the receiver would not be able to determine which direction the beacon was transmitted 12
13 Transmitting System Receiving System 13
 Turn Right until Compass is (Reading +- 10) Proceed")
14 Start Read Heading/RSSI Beacon Detection Save Heading at Strongest RSSI Logic Set Desired Compass Reading to (360-Heading) 180<Reading< 360 0<Reading<18 0 Turn Left until Compass is (Reading+-10) Turn Right until Compass is (Reading +- 10) Proceed Forward End
15 Beacon Location Algorithm Read heading from beacon at strongest signal strength Robot must travel in opposite direction of beacon heading Calculate 360-heading for a desired robot heading Determine which direction to turn (left/right) depending on the desired robot heading Heading between 0 and 180 turn right, else turn left Continue reading until robot heading is within 10 degrees of the desired heading Path found 15
16 Looking Forward Construct physical rotating beacon Test implemented code with rotating beacon Various weather conditions Various environments Integrate this code with sensor code on the robot itself Refine code
17 Chassis/Mechanical: John Augustine & Kelty Tobin 17

18 Chassis Design Two Motors Custom suspension Sensor, board, display mounts with wire routing Internal belt drive Multi part 3D printed assembly with snap fits and screw mounts (39 components) 18



19 Board and Sensor Layout Compact design to save weight 19



20 Wheel Design Primary design constraints Be minimal and light Maintain some rigidity Durability for the expected use Allow for climbing of objects Optimal angle of contact: 90 Materials RC rubber wheels: heavy and expensive 3d printed: loses rigidity and durability while increasing weight at large sizes Foam core: extremely light, may break easily 20

21 Motor Controls Avoid turning them at desired driving speed initially Allows for establishment of traction Much finer control of robot motion Use the data from sensors to dictate max driving speeds for optimal bite affected by: Angle of surrounding terrain Angle of contact of wheels varies through path motion Coefficient of friction of the wheels 21
22 Future Chassis and Linkage Design Issues to address Stay underweight: 1.5kg Limit tread motion: currently 5 d.o.f Use Nested ball joints. Must limit to provide optimal contact Avoid binding tread assembly allow for increased accuracy in sensing & movements 22
23 Robotics Challenge: Questions 23
Robotics Challenge. Final Report Spring Semester Full report by Tyler Quintana Tyler Gus Josh Cogdill Raul Davila John Augustine
 Robotics Challenge Final Report Spring Semester 2016 - Full report by Tyler Quintana Tyler Gus Josh Cogdill Raul Davila John Augustine Department of Electrical and Computer Engineering Colorado State University
Robotics Challenge Final Report Spring Semester 2016 - Full report by Tyler Quintana Tyler Gus Josh Cogdill Raul Davila John Augustine Department of Electrical and Computer Engineering Colorado State University
Park Ranger. Li Yang April 21, 2014
 Park Ranger Li Yang April 21, 2014 University of Florida Department of Electrical and Computer Engineering EEL 5666C IMDL Written Report Instructors: A. Antonio Arroyo, Eric M. Schwartz TAs: Andy Gray,
Park Ranger Li Yang April 21, 2014 University of Florida Department of Electrical and Computer Engineering EEL 5666C IMDL Written Report Instructors: A. Antonio Arroyo, Eric M. Schwartz TAs: Andy Gray,
ROBOTICS ENG YOUSEF A. SHATNAWI INTRODUCTION
 ROBOTICS INTRODUCTION THIS COURSE IS TWO PARTS Mobile Robotics. Locomotion (analogous to manipulation) (Legged and wheeled robots). Navigation and obstacle avoidance algorithms. Robot Vision Sensors and
ROBOTICS INTRODUCTION THIS COURSE IS TWO PARTS Mobile Robotics. Locomotion (analogous to manipulation) (Legged and wheeled robots). Navigation and obstacle avoidance algorithms. Robot Vision Sensors and
HAND GESTURE CONTROLLED ROBOT USING ARDUINO
 HAND GESTURE CONTROLLED ROBOT USING ARDUINO Vrushab Sakpal 1, Omkar Patil 2, Sagar Bhagat 3, Badar Shaikh 4, Prof.Poonam Patil 5 1,2,3,4,5 Department of Instrumentation Bharati Vidyapeeth C.O.E,Kharghar,Navi
HAND GESTURE CONTROLLED ROBOT USING ARDUINO Vrushab Sakpal 1, Omkar Patil 2, Sagar Bhagat 3, Badar Shaikh 4, Prof.Poonam Patil 5 1,2,3,4,5 Department of Instrumentation Bharati Vidyapeeth C.O.E,Kharghar,Navi
MULTI ROBOT COMMUNICATION AND TARGET TRACKING SYSTEM AND IMPLEMENTATION OF ROBOT USING ARDUINO
 MULTI ROBOT COMMUNICATION AND TARGET TRACKING SYSTEM AND IMPLEMENTATION OF ROBOT USING ARDUINO K. Sindhuja 1, CH. Lavanya 2 1Student, Department of ECE, GIST College, Andhra Pradesh, INDIA 2Assistant Professor,
MULTI ROBOT COMMUNICATION AND TARGET TRACKING SYSTEM AND IMPLEMENTATION OF ROBOT USING ARDUINO K. Sindhuja 1, CH. Lavanya 2 1Student, Department of ECE, GIST College, Andhra Pradesh, INDIA 2Assistant Professor,
Advanced Mechatronics 1 st Mini Project. Remote Control Car. Jose Antonio De Gracia Gómez, Amartya Barua March, 25 th 2014
 Advanced Mechatronics 1 st Mini Project Remote Control Car Jose Antonio De Gracia Gómez, Amartya Barua March, 25 th 2014 Remote Control Car Manual Control with the remote and direction buttons Automatic
Advanced Mechatronics 1 st Mini Project Remote Control Car Jose Antonio De Gracia Gómez, Amartya Barua March, 25 th 2014 Remote Control Car Manual Control with the remote and direction buttons Automatic
CENG 5931 HW 5 Mobile Robotics Due March 5. Sensors for Mobile Robots
 CENG 5931 HW 5 Mobile Robotics Due March 5 Sensors for Mobile Robots Dr. T. L. Harman: 281 283-3774 Office D104 For reports: Read HomeworkEssayRequirements on the web site and follow instructions which
CENG 5931 HW 5 Mobile Robotics Due March 5 Sensors for Mobile Robots Dr. T. L. Harman: 281 283-3774 Office D104 For reports: Read HomeworkEssayRequirements on the web site and follow instructions which
AN HYBRID LOCOMOTION SERVICE ROBOT FOR INDOOR SCENARIOS 1
 AN HYBRID LOCOMOTION SERVICE ROBOT FOR INDOOR SCENARIOS 1 Jorge Paiva Luís Tavares João Silva Sequeira Institute for Systems and Robotics Institute for Systems and Robotics Instituto Superior Técnico,
AN HYBRID LOCOMOTION SERVICE ROBOT FOR INDOOR SCENARIOS 1 Jorge Paiva Luís Tavares João Silva Sequeira Institute for Systems and Robotics Institute for Systems and Robotics Instituto Superior Técnico,
FLL Coaches Clinic Chassis and Attachments. Patrick R. Michaud
 FLL Coaches Clinic Chassis and Attachments Patrick R. Michaud pmichaud@pobox.com Erik Jonsson School of Engineering and Computer Science University of Texas at Dallas September 23, 2017 Presentation Outline
FLL Coaches Clinic Chassis and Attachments Patrick R. Michaud pmichaud@pobox.com Erik Jonsson School of Engineering and Computer Science University of Texas at Dallas September 23, 2017 Presentation Outline
Wheeled Mobile Robot Obstacle Avoidance Using Compass and Ultrasonic
 Universal Journal of Control and Automation 6(1): 13-18, 2018 DOI: 10.13189/ujca.2018.060102 http://www.hrpub.org Wheeled Mobile Robot Obstacle Avoidance Using Compass and Ultrasonic Yousef Moh. Abueejela
Universal Journal of Control and Automation 6(1): 13-18, 2018 DOI: 10.13189/ujca.2018.060102 http://www.hrpub.org Wheeled Mobile Robot Obstacle Avoidance Using Compass and Ultrasonic Yousef Moh. Abueejela
Autonomous Obstacle Avoiding and Path Following Rover
 Volume 114 No. 9 2017, 271-281 ISSN: 1311-8080 (printed version); ISSN: 1314-3395 (on-line version) url: http://www.ijpam.eu Autonomous Obstacle Avoiding and Path Following Rover ijpam.eu Sandeep Polina
Volume 114 No. 9 2017, 271-281 ISSN: 1311-8080 (printed version); ISSN: 1314-3395 (on-line version) url: http://www.ijpam.eu Autonomous Obstacle Avoiding and Path Following Rover ijpam.eu Sandeep Polina
Students will design, program, and build a robot vehicle to traverse a maze in 30 seconds without touching any sidewalls or going out of bounds.
 Overview Challenge Students will design, program, and build a robot vehicle to traverse a maze in 30 seconds without touching any sidewalls or going out of bounds. Materials Needed One of these sets: TETRIX
Overview Challenge Students will design, program, and build a robot vehicle to traverse a maze in 30 seconds without touching any sidewalls or going out of bounds. Materials Needed One of these sets: TETRIX
ECE 477 Digital Systems Senior Design Project Rev 8/09. Homework 5: Theory of Operation and Hardware Design Narrative
 ECE 477 Digital Systems Senior Design Project Rev 8/09 Homework 5: Theory of Operation and Hardware Design Narrative Team Code Name: _ATV Group No. 3 Team Member Completing This Homework: Sebastian Hening
ECE 477 Digital Systems Senior Design Project Rev 8/09 Homework 5: Theory of Operation and Hardware Design Narrative Team Code Name: _ATV Group No. 3 Team Member Completing This Homework: Sebastian Hening
Building a FIRST Robotics team Utilizing the VEX System and Recognized Team Building Methods
 Building a FIRST Robotics team Utilizing the VEX System and Recognized Team Building Methods Written and Presented by: Ken and Donna Rillings TEAM BLITZ 2007 DENVER REGIONAL ROOKIE ALL STAR WINNER 2007
Building a FIRST Robotics team Utilizing the VEX System and Recognized Team Building Methods Written and Presented by: Ken and Donna Rillings TEAM BLITZ 2007 DENVER REGIONAL ROOKIE ALL STAR WINNER 2007
I plan to build a four-legged robot with these objectives in mind:
 The problem I have been intrigued with the idea of building a walking robot that can perform a certain task. A walking robot in the future would have the potential to climb over difficult terrain. With
The problem I have been intrigued with the idea of building a walking robot that can perform a certain task. A walking robot in the future would have the potential to climb over difficult terrain. With
Senior Design I. Fast Acquisition and Real-time Tracking Vehicle. University of Central Florida
 Senior Design I Fast Acquisition and Real-time Tracking Vehicle University of Central Florida College of Engineering Department of Electrical Engineering Inventors: Seth Rhodes Undergraduate B.S.E.E. Houman
Senior Design I Fast Acquisition and Real-time Tracking Vehicle University of Central Florida College of Engineering Department of Electrical Engineering Inventors: Seth Rhodes Undergraduate B.S.E.E. Houman
Schematics for Breakout Examples
 Schematics for Breakout Examples This document contains wiring diagrams and component lists for the examples. A diagram may be used for more than one example file. The corresponding files are listed for
Schematics for Breakout Examples This document contains wiring diagrams and component lists for the examples. A diagram may be used for more than one example file. The corresponding files are listed for
OughtToPilot. Project Report of Submission PC128 to 2008 Propeller Design Contest. Jason Edelberg
 OughtToPilot Project Report of Submission PC128 to 2008 Propeller Design Contest Jason Edelberg Table of Contents Project Number.. 3 Project Description.. 4 Schematic 5 Source Code. Attached Separately
OughtToPilot Project Report of Submission PC128 to 2008 Propeller Design Contest Jason Edelberg Table of Contents Project Number.. 3 Project Description.. 4 Schematic 5 Source Code. Attached Separately
VOICE CONTROLLED ROBOT WITH REAL TIME BARRIER DETECTION AND AVERTING
 VOICE CONTROLLED ROBOT WITH REAL TIME BARRIER DETECTION AND AVERTING P.NARENDRA ILAYA PALLAVAN 1, S.HARISH 2, C.DHACHINAMOORTHI 3 1Assistant Professor, EIE Department, Bannari Amman Institute of Technology,
VOICE CONTROLLED ROBOT WITH REAL TIME BARRIER DETECTION AND AVERTING P.NARENDRA ILAYA PALLAVAN 1, S.HARISH 2, C.DHACHINAMOORTHI 3 1Assistant Professor, EIE Department, Bannari Amman Institute of Technology,
Team Autono-Mo. Jacobia. Department of Computer Science and Engineering The University of Texas at Arlington
 Department of Computer Science and Engineering The University of Texas at Arlington Team Autono-Mo Jacobia Architecture Design Specification Team Members: Bill Butts Darius Salemizadeh Lance Storey Yunesh
Department of Computer Science and Engineering The University of Texas at Arlington Team Autono-Mo Jacobia Architecture Design Specification Team Members: Bill Butts Darius Salemizadeh Lance Storey Yunesh
Flight control Set and Kit
 Flight control Set and Kit Quick Start Guide For MegaPirate NG Version 1.2 Thanks for choosing AirStudio flight control electronics. We have created it based on best-in-class software, hardware and our
Flight control Set and Kit Quick Start Guide For MegaPirate NG Version 1.2 Thanks for choosing AirStudio flight control electronics. We have created it based on best-in-class software, hardware and our
Master Op-Doc/Test Plan
 Power Supply Master Op-Doc/Test Plan Define Engineering Specs Establish battery life Establish battery technology Establish battery size Establish number of batteries Establish weight of batteries Establish
Power Supply Master Op-Doc/Test Plan Define Engineering Specs Establish battery life Establish battery technology Establish battery size Establish number of batteries Establish weight of batteries Establish
Motion Capture for Runners
 Motion Capture for Runners Design Team 8 - Spring 2013 Members: Blake Frantz, Zhichao Lu, Alex Mazzoni, Nori Wilkins, Chenli Yuan, Dan Zilinskas Sponsor: Air Force Research Laboratory Dr. Eric T. Vinande
Motion Capture for Runners Design Team 8 - Spring 2013 Members: Blake Frantz, Zhichao Lu, Alex Mazzoni, Nori Wilkins, Chenli Yuan, Dan Zilinskas Sponsor: Air Force Research Laboratory Dr. Eric T. Vinande
SV613 USB Interface Wireless Module SV613
 USB Interface Wireless Module SV613 1. Description SV613 is highly-integrated RF module, which adopts high performance Si4432 from Silicon Labs. It comes with USB Interface. SV613 has high sensitivity
USB Interface Wireless Module SV613 1. Description SV613 is highly-integrated RF module, which adopts high performance Si4432 from Silicon Labs. It comes with USB Interface. SV613 has high sensitivity
KINECT CONTROLLED HUMANOID AND HELICOPTER
 KINECT CONTROLLED HUMANOID AND HELICOPTER Muffakham Jah College of Engineering & Technology Presented by : MOHAMMED KHAJA ILIAS PASHA ZESHAN ABDUL MAJEED AZMI SYED ABRAR MOHAMMED ISHRAQ SARID MOHAMMED
KINECT CONTROLLED HUMANOID AND HELICOPTER Muffakham Jah College of Engineering & Technology Presented by : MOHAMMED KHAJA ILIAS PASHA ZESHAN ABDUL MAJEED AZMI SYED ABRAR MOHAMMED ISHRAQ SARID MOHAMMED
Introducing the Quadrotor Flying Robot
 Introducing the Quadrotor Flying Robot Roy Brewer Organizer Philadelphia Robotics Meetup Group August 13, 2009 What is a Quadrotor? A vehicle having 4 rotors (propellers) at each end of a square cross
Introducing the Quadrotor Flying Robot Roy Brewer Organizer Philadelphia Robotics Meetup Group August 13, 2009 What is a Quadrotor? A vehicle having 4 rotors (propellers) at each end of a square cross
Electronics Design Laboratory Lecture #10. ECEN 2270 Electronics Design Laboratory
 Electronics Design Laboratory Lecture #10 Electronics Design Laboratory 1 Lessons from Experiment 4 Code debugging: use print statements and serial monitor window Circuit debugging: Re check operation
Electronics Design Laboratory Lecture #10 Electronics Design Laboratory 1 Lessons from Experiment 4 Code debugging: use print statements and serial monitor window Circuit debugging: Re check operation
Electronics Design Laboratory Lecture #11. ECEN 2270 Electronics Design Laboratory
 Electronics Design Laboratory Lecture # ECEN 7 Electronics Design Laboratory Project Must rely on fully functional Lab circuits, Lab circuit is optional Can re do wireless or replace it with a different
Electronics Design Laboratory Lecture # ECEN 7 Electronics Design Laboratory Project Must rely on fully functional Lab circuits, Lab circuit is optional Can re do wireless or replace it with a different
Re: ENSC 370 Project Gerbil Process Report
 Simon Fraser University Burnaby, BC V5A 1S6 trac-tech@sfu.ca April 30, 1999 Dr. Andrew Rawicz School of Engineering Science Simon Fraser University Burnaby, BC V5A 1S6 Re: ENSC 370 Project Gerbil Process
Simon Fraser University Burnaby, BC V5A 1S6 trac-tech@sfu.ca April 30, 1999 Dr. Andrew Rawicz School of Engineering Science Simon Fraser University Burnaby, BC V5A 1S6 Re: ENSC 370 Project Gerbil Process
DESIGN, ANALYSIS AND MANUFACTURE OF AN ACTIVE CONTROL PANEL WITH VIBRATION SUPPRESSION ON AN AUTONOMOUS INTERPLANETARY ROVER
 DESIGN, ANALYSIS AND MANUFACTURE OF AN ACTIVE CONTROL PANEL WITH VIBRATION SUPPRESSION ON AN AUTONOMOUS INTERPLANETARY ROVER Lee Do Department of Mechanical Engineering University of Hawai i at Mānoa Honolulu,
DESIGN, ANALYSIS AND MANUFACTURE OF AN ACTIVE CONTROL PANEL WITH VIBRATION SUPPRESSION ON AN AUTONOMOUS INTERPLANETARY ROVER Lee Do Department of Mechanical Engineering University of Hawai i at Mānoa Honolulu,
Gesture Controlled Car
 Gesture Controlled Car Chirag Gupta Department of ECE ITM University Nitin Garg Department of ECE ITM University ABSTRACT Gesture Controlled Car is a robot which can be controlled by simple human gestures.
Gesture Controlled Car Chirag Gupta Department of ECE ITM University Nitin Garg Department of ECE ITM University ABSTRACT Gesture Controlled Car is a robot which can be controlled by simple human gestures.
Application Note. Communication between arduino and IMU Software capturing the data
 Application Note Communication between arduino and IMU Software capturing the data ECE 480 Team 8 Chenli Yuan Presentation Prep Date: April 8, 2013 Executive Summary In summary, this application note is
Application Note Communication between arduino and IMU Software capturing the data ECE 480 Team 8 Chenli Yuan Presentation Prep Date: April 8, 2013 Executive Summary In summary, this application note is
Robotic Vehicle Design
 Robotic Vehicle Design Sensors, measurements and interfacing Jim Keller July 19, 2005 Sensor Design Types Topology in system Specifications/Considerations for Selection Placement Estimators Summary Sensor
Robotic Vehicle Design Sensors, measurements and interfacing Jim Keller July 19, 2005 Sensor Design Types Topology in system Specifications/Considerations for Selection Placement Estimators Summary Sensor
INSTRUCTIONS. 3DR Plane CONTENTS. Thank you for purchasing a 3DR Plane!
 DR Plane INSTRUCTIONS Thank you for purchasing a DR Plane! CONTENTS 1 1 Fuselage Right wing Left wing Horizontal stabilizer Vertical stabilizer Carbon fiber bar 1 1 1 7 8 10 11 1 Audio/video (AV) cable
DR Plane INSTRUCTIONS Thank you for purchasing a DR Plane! CONTENTS 1 1 Fuselage Right wing Left wing Horizontal stabilizer Vertical stabilizer Carbon fiber bar 1 1 1 7 8 10 11 1 Audio/video (AV) cable
Mission Objective Tree
 Group 2 Mission Objective Tree Tasks Rugged Vehicle Fly Planned Path Fly Parallel to Wall Photo-Survey Bridge Solar Feasibility Objectives Analyze Vehicle Capabilities Construct Support Structure Analyze
Group 2 Mission Objective Tree Tasks Rugged Vehicle Fly Planned Path Fly Parallel to Wall Photo-Survey Bridge Solar Feasibility Objectives Analyze Vehicle Capabilities Construct Support Structure Analyze
Autonomous Following RObot Initial Design Review
 Autonomous Following RObot Initial Design Review James Tse (Leader) Wei Dai Travis Frecker Peter Verlangieri Professor John Johnson ECE 189A Fall 2012 Initial Design Review: Project Description Original
Autonomous Following RObot Initial Design Review James Tse (Leader) Wei Dai Travis Frecker Peter Verlangieri Professor John Johnson ECE 189A Fall 2012 Initial Design Review: Project Description Original
International teams FAQ
 International teams FAQ Q1: Teammates specializing in which technical field are suggested? And how many people are needed for each field? 1. People in following technical area are needed Hardware/Circuit
International teams FAQ Q1: Teammates specializing in which technical field are suggested? And how many people are needed for each field? 1. People in following technical area are needed Hardware/Circuit
Robotic Vehicle Design
 Robotic Vehicle Design Sensors, measurements and interfacing Jim Keller July 2008 1of 14 Sensor Design Types Topology in system Specifications/Considerations for Selection Placement Estimators Summary
Robotic Vehicle Design Sensors, measurements and interfacing Jim Keller July 2008 1of 14 Sensor Design Types Topology in system Specifications/Considerations for Selection Placement Estimators Summary
Rudimentary Swarm Robotics
 Rudimentary Swarm Robotics Josiah Hamid Khani, Thomas Keller, Matthew Sims, & Isaac Swift Episcopal School of Dallas, josiahhk@gmail Project Description Rudimentary Swarm Robotics The concept of swarm
Rudimentary Swarm Robotics Josiah Hamid Khani, Thomas Keller, Matthew Sims, & Isaac Swift Episcopal School of Dallas, josiahhk@gmail Project Description Rudimentary Swarm Robotics The concept of swarm
Solar Powered Obstacle Avoiding Robot
 Solar Powered Obstacle Avoiding Robot S.S. Subashka Ramesh 1, Tarun Keshri 2, Sakshi Singh 3, Aastha Sharma 4 1 Asst. professor, SRM University, Chennai, Tamil Nadu, India. 2, 3, 4 B.Tech Student, SRM
Solar Powered Obstacle Avoiding Robot S.S. Subashka Ramesh 1, Tarun Keshri 2, Sakshi Singh 3, Aastha Sharma 4 1 Asst. professor, SRM University, Chennai, Tamil Nadu, India. 2, 3, 4 B.Tech Student, SRM
Dynamically Adaptive Inverted Pendulum Platfom
 Dynamically Adaptive Inverted Pendulum Platfom 2009 Colorado Space Grant Symposium Jonathon Cox Colorado State University Undergraduate in Electrical Engineering Email: csutke@gmail.com Web: www.campusaudio.com
Dynamically Adaptive Inverted Pendulum Platfom 2009 Colorado Space Grant Symposium Jonathon Cox Colorado State University Undergraduate in Electrical Engineering Email: csutke@gmail.com Web: www.campusaudio.com
Smart Objects for Human Computer Interaction, Experimental Study
 Smart Objects for Human Computer Interaction, Experimental Study Doggen, J.*; Neefs, J.; Brands, E.; Peeters, T.; Bracke, J.; Smets, M.; Van der Schueren, F. *jeroen.doggen@artesis.be March 22, 2012 2/29
Smart Objects for Human Computer Interaction, Experimental Study Doggen, J.*; Neefs, J.; Brands, E.; Peeters, T.; Bracke, J.; Smets, M.; Van der Schueren, F. *jeroen.doggen@artesis.be March 22, 2012 2/29
PRELIMINARY DESIGN REPORT
 PRELIMINARY DESIGN REPORT Dodge This! DODGERS: Cristobal Rivero Derek Fairbanks 1/27/2009 Abstract: Our project is to develop an automatic dodge ball game. It consists of an infrared video camera, computer,
PRELIMINARY DESIGN REPORT Dodge This! DODGERS: Cristobal Rivero Derek Fairbanks 1/27/2009 Abstract: Our project is to develop an automatic dodge ball game. It consists of an infrared video camera, computer,
# Made In USA. Simple GPS Tracker Parts List
 Needed Tools and Materials Compatible Ebay (to mount electronics to) Drill and Screwdriver (for mounting Transmitter to ebay) Compatible Battery (for powering Airborne Transmitter) Optional Tools / Finishing
Needed Tools and Materials Compatible Ebay (to mount electronics to) Drill and Screwdriver (for mounting Transmitter to ebay) Compatible Battery (for powering Airborne Transmitter) Optional Tools / Finishing
Zlinx Wireless I/O. Peer-to-Peer and Modbus I/O PRODUCT INFORMATION B&B ELECTRONICS
 Zlinx Wireless Modbus I/O-0712ds page 1/5 Modular, Customizable Wire Replacement 128 / 256 Bit AES Encryption Software Selectable RF Transmit Power Software Selectable Over-the-air Data Rate Modbus ASCII
Zlinx Wireless Modbus I/O-0712ds page 1/5 Modular, Customizable Wire Replacement 128 / 256 Bit AES Encryption Software Selectable RF Transmit Power Software Selectable Over-the-air Data Rate Modbus ASCII
USB Port Medium Power Wireless Module SV653
 USB Port Medium Power Wireless Module SV653 Description SV653 is a high-power USB interface integrated wireless data transmission module, using high-performance Silicon Lab Si4432 RF chip. Low receiver
USB Port Medium Power Wireless Module SV653 Description SV653 is a high-power USB interface integrated wireless data transmission module, using high-performance Silicon Lab Si4432 RF chip. Low receiver
Chassis & Attachments 101. Part 1: Chassis Overview
 Chassis & Attachments 101 Part 1: Chassis Overview 2017 1 Introductions Rest rooms location. Food and Drink. Cell phones. Today presentation available at: http://www.roboplex.org/fll 2 What can be used
Chassis & Attachments 101 Part 1: Chassis Overview 2017 1 Introductions Rest rooms location. Food and Drink. Cell phones. Today presentation available at: http://www.roboplex.org/fll 2 What can be used
MICROCONTROLLER BASED SPEED SYNCHRONIZATION OF MULTIPLE DC MOTORS IN TEXTILE APPLICATIONS
 MICROCONTROLLER BASED SPEED SYNCHRONIZATION OF MULTIPLE DC MOTORS IN TEXTILE APPLICATIONS 1 RAKSHA A R, 2 KAVYA B, 3 PRAVEENA ANAJI, 4 NANDESH K N 1,2 UG student, 3,4 Assistant Professor Department of
MICROCONTROLLER BASED SPEED SYNCHRONIZATION OF MULTIPLE DC MOTORS IN TEXTILE APPLICATIONS 1 RAKSHA A R, 2 KAVYA B, 3 PRAVEENA ANAJI, 4 NANDESH K N 1,2 UG student, 3,4 Assistant Professor Department of
Strategic Design. Michael Corsetto
 Strategic Design Michael Corsetto Training Golden Rule #3 Steal From The Best, Invent The Rest Get Team familiar with past games and robots Games will often be similar to past games Examples: 2004, 2010,
Strategic Design Michael Corsetto Training Golden Rule #3 Steal From The Best, Invent The Rest Get Team familiar with past games and robots Games will often be similar to past games Examples: 2004, 2010,
Low-Cost Mobile Lab Solutions for Individualized Mechatronic Education
 Low-Cost Mobile Lab Solutions for Individualized Mechatronic Education Joshua L. Hurst, Lecturer Department of Mechanical Aerospace and Nuclear Engineering Rensselaer Polytechnic Institute 3/13/2014 1
Low-Cost Mobile Lab Solutions for Individualized Mechatronic Education Joshua L. Hurst, Lecturer Department of Mechanical Aerospace and Nuclear Engineering Rensselaer Polytechnic Institute 3/13/2014 1
4GHz / 6GHz Radiation Measurement System
 4GHz / 6GHz Radiation Measurement System The MegiQ Radiation Measurement System (RMS) is a compact test system that performs 3-axis radiation pattern measurement in non-anechoic spaces. With a frequency
4GHz / 6GHz Radiation Measurement System The MegiQ Radiation Measurement System (RMS) is a compact test system that performs 3-axis radiation pattern measurement in non-anechoic spaces. With a frequency
ARDUINO BASED CALIBRATION OF AN INERTIAL SENSOR IN VIEW OF A GNSS/IMU INTEGRATION
 Journal of Young Scientist, Volume IV, 2016 ISSN 2344-1283; ISSN CD-ROM 2344-1291; ISSN Online 2344-1305; ISSN-L 2344 1283 ARDUINO BASED CALIBRATION OF AN INERTIAL SENSOR IN VIEW OF A GNSS/IMU INTEGRATION
Journal of Young Scientist, Volume IV, 2016 ISSN 2344-1283; ISSN CD-ROM 2344-1291; ISSN Online 2344-1305; ISSN-L 2344 1283 ARDUINO BASED CALIBRATION OF AN INERTIAL SENSOR IN VIEW OF A GNSS/IMU INTEGRATION
Robotics using Lego Mindstorms EV3 (Intermediate)
") Robotics using Lego Mindstorms EV3 (Intermediate) Facebook.com/roboticsgateway @roboticsgateway Robotics using EV3 Are we ready to go Roboticists? Does each group have at least one laptop? Do you have
Robotics using Lego Mindstorms EV3 (Intermediate) Facebook.com/roboticsgateway @roboticsgateway Robotics using EV3 Are we ready to go Roboticists? Does each group have at least one laptop? Do you have
Devastator Tank Mobile Platform with Edison SKU:ROB0125
 Devastator Tank Mobile Platform with Edison SKU:ROB0125 From Robot Wiki Contents 1 Introduction 2 Tutorial 2.1 Chapter 2: Run! Devastator! 2.2 Chapter 3: Expansion Modules 2.3 Chapter 4: Build The Devastator
Devastator Tank Mobile Platform with Edison SKU:ROB0125 From Robot Wiki Contents 1 Introduction 2 Tutorial 2.1 Chapter 2: Run! Devastator! 2.2 Chapter 3: Expansion Modules 2.3 Chapter 4: Build The Devastator
Automatic Accident Detection and Intelligent Navigation System [1] Akshatha.V, [2] K.Nirmala Kumari
![Automatic Accident Detection and Intelligent Navigation System [1] Akshatha.V, [2] K.Nirmala Kumari](/thumbs/89/99438400.jpg "Automatic Accident Detection and Intelligent Navigation System [1] Akshatha.V, [2] K.Nirmala Kumari") Automatic Accident Detection and Intelligent Navigation System [1] Akshatha.V, [2] K.Nirmala Kumari [1] PG Student, BIT Bengaluru, [2] Associate Professor Dept. of Electronics and Communication, BIT,Bengaluru
Automatic Accident Detection and Intelligent Navigation System [1] Akshatha.V, [2] K.Nirmala Kumari [1] PG Student, BIT Bengaluru, [2] Associate Professor Dept. of Electronics and Communication, BIT,Bengaluru
Multi-Vehicles Formation Control Exploring a Scalar Field
 Multi-Vehicles Formation Control Exploring a Scalar Field Polytechnic University Department of Mechanical, Aerospace, and Manufacturing Engineering Polytechnic University,6 Metrotech,, Brooklyn, NY 11201
Multi-Vehicles Formation Control Exploring a Scalar Field Polytechnic University Department of Mechanical, Aerospace, and Manufacturing Engineering Polytechnic University,6 Metrotech,, Brooklyn, NY 11201
Tyre Pressure Monitoring System Infra-Red Array
 Tyre Pressure Monitoring System Infra-Red Array The system consists of a powered pressure and IR temperature array sensor with transmitter fitted to a wheel rim. This sends pressure and temperature data
Tyre Pressure Monitoring System Infra-Red Array The system consists of a powered pressure and IR temperature array sensor with transmitter fitted to a wheel rim. This sends pressure and temperature data
Multi-Agent Robotics with GPS Navigation
 Jay Joshi Edison High School 50 Boulevard of the Eagles Edison, NJ 08817 Multi-Agent Robotics with GPS Navigation Abstract The GPS Navigation project is a multi-agent robotics project. A GPS Navigation
Jay Joshi Edison High School 50 Boulevard of the Eagles Edison, NJ 08817 Multi-Agent Robotics with GPS Navigation Abstract The GPS Navigation project is a multi-agent robotics project. A GPS Navigation
Lab 2. Logistics & Travel. Installing all the packages. Makeup class Recorded class Class time to work on lab Remote class
 Lab 2 Installing all the packages Logistics & Travel Makeup class Recorded class Class time to work on lab Remote class Classification of Sensors Proprioceptive sensors internal to robot Exteroceptive
Lab 2 Installing all the packages Logistics & Travel Makeup class Recorded class Class time to work on lab Remote class Classification of Sensors Proprioceptive sensors internal to robot Exteroceptive
LABORATORY AND FIELD INVESTIGATIONS ON XBEE MODULE AND ITS EFFECTIVENESS FOR TRANSMISSION OF SLOPE MONITORING DATA IN MINES
 LABORATORY AND FIELD INVESTIGATIONS ON XBEE MODULE AND ITS EFFECTIVENESS FOR TRANSMISSION OF SLOPE MONITORING DATA IN MINES 1 Guntha Karthik, 2 Prof.Singam Jayanthu, 3 Bhushan N Patil, and 4 R.Prashanth
LABORATORY AND FIELD INVESTIGATIONS ON XBEE MODULE AND ITS EFFECTIVENESS FOR TRANSMISSION OF SLOPE MONITORING DATA IN MINES 1 Guntha Karthik, 2 Prof.Singam Jayanthu, 3 Bhushan N Patil, and 4 R.Prashanth
EEL5666C IMDL Spring 2006 Student: Andrew Joseph. *Alarm-o-bot*
 EEL5666C IMDL Spring 2006 Student: Andrew Joseph *Alarm-o-bot* TAs: Adam Barnett, Sara Keen Instructor: A.A. Arroyo Final Report April 25, 2006 Table of Contents Abstract 3 Executive Summary 3 Introduction
EEL5666C IMDL Spring 2006 Student: Andrew Joseph *Alarm-o-bot* TAs: Adam Barnett, Sara Keen Instructor: A.A. Arroyo Final Report April 25, 2006 Table of Contents Abstract 3 Executive Summary 3 Introduction
Project Number: P13203
 Multidisciplinary Senior Design Conference Kate Gleason College of Engineering Rochester Institute of Technology Rochester, New York 14623 Project Number: P13203 TIGERBOT EXTENSION Mohammad Arefin Electrical
Multidisciplinary Senior Design Conference Kate Gleason College of Engineering Rochester Institute of Technology Rochester, New York 14623 Project Number: P13203 TIGERBOT EXTENSION Mohammad Arefin Electrical
the complete parts reference bricks
 the complete parts reference Here s a detailed overview of all the pieces in your LEGO BOOST kit. You can also identify LEGO elements precisely by their LEGO ID, which is printed on the LEGO BOOST test
the complete parts reference Here s a detailed overview of all the pieces in your LEGO BOOST kit. You can also identify LEGO elements precisely by their LEGO ID, which is printed on the LEGO BOOST test
Workshops Elisava Introduction to programming and electronics (Scratch & Arduino)
") Workshops Elisava 2011 Introduction to programming and electronics (Scratch & Arduino) What is programming? Make an algorithm to do something in a specific language programming. Algorithm: a procedure
Workshops Elisava 2011 Introduction to programming and electronics (Scratch & Arduino) What is programming? Make an algorithm to do something in a specific language programming. Algorithm: a procedure
Module contents. Antenna systems. RF propagation. RF prop. 1
 Module contents Antenna systems RF propagation RF prop. 1 Basic antenna operation Dipole Antennas are specific to Frequency based on dimensions of elements 1/4 λ Dipole (Wire 1/4 of a Wavelength) creates
Module contents Antenna systems RF propagation RF prop. 1 Basic antenna operation Dipole Antennas are specific to Frequency based on dimensions of elements 1/4 λ Dipole (Wire 1/4 of a Wavelength) creates
The Nomenclature and Geometry of LEGO
 The Nomenclature and Geometry of LEGO AN OVERVIEW OF LEGO EV3 MINDSTORMS ELEMENTS AND HOW THEY WORK TOGETHER UPDATED 9/27/2015 Required Stuff Please do not wander the building. Rest Rooms Location. Food
The Nomenclature and Geometry of LEGO AN OVERVIEW OF LEGO EV3 MINDSTORMS ELEMENTS AND HOW THEY WORK TOGETHER UPDATED 9/27/2015 Required Stuff Please do not wander the building. Rest Rooms Location. Food
Trimble Zephyr Geodetic 2 GNSS Antenna. Trimble GNSS-Ti Choke Ring Antenna. Trimble GNSS Choke Ring Antenna. Specifications
 Trimble GNSS GEODETIC ANTENNAS A SOLUTION FOR EVERY APPLICATION The choice is yours. Trimble provides three GNSS antennas for geodetic applications. Both solutions deliver long term performance with proven
Trimble GNSS GEODETIC ANTENNAS A SOLUTION FOR EVERY APPLICATION The choice is yours. Trimble provides three GNSS antennas for geodetic applications. Both solutions deliver long term performance with proven
INSTALLATION and OPERATION INSTRUCTIONS. FOR FiberLink BI-DIRECTIONAL AMPLIFIER WITH DIVERSITY MW-FBDA-800AB-50W-DIV
 INSTALLATION and OPERATION INSTRUCTIONS FOR FiberLink BI-DIRECTIONAL AMPLIFIER WITH DIVERSITY MW-FBDA-800AB-50W-DIV Page 1 of 15 TABLE OF CONTENTS PARA No. PARAGRAPH PAGE No. 1. OVERVIEW 3 2. COMPONENT
INSTALLATION and OPERATION INSTRUCTIONS FOR FiberLink BI-DIRECTIONAL AMPLIFIER WITH DIVERSITY MW-FBDA-800AB-50W-DIV Page 1 of 15 TABLE OF CONTENTS PARA No. PARAGRAPH PAGE No. 1. OVERVIEW 3 2. COMPONENT
Categories of Robots and their Hardware Components. Click to add Text Martin Jagersand
 Categories of Robots and their Hardware Components Click to add Text Martin Jagersand Click to add Text Robot? Click to add Text Robot? How do we categorize these robots? What they can do? Most robots
Categories of Robots and their Hardware Components Click to add Text Martin Jagersand Click to add Text Robot? Click to add Text Robot? How do we categorize these robots? What they can do? Most robots
Two Hour Robot. Lets build a Robot.
 Lets build a Robot. Our robot will use an ultrasonic sensor and servos to navigate it s way around a maze. We will be making 2 voltage circuits : A 5 Volt for our ultrasonic sensor, sound and lights powered
Lets build a Robot. Our robot will use an ultrasonic sensor and servos to navigate it s way around a maze. We will be making 2 voltage circuits : A 5 Volt for our ultrasonic sensor, sound and lights powered
FLCS V2.1. AHRS, Autopilot, Gyro Stabilized Gimbals Control, Ground Control Station
 AHRS, Autopilot, Gyro Stabilized Gimbals Control, Ground Control Station The platform provides a high performance basis for electromechanical system control. Originally designed for autonomous aerial vehicle
AHRS, Autopilot, Gyro Stabilized Gimbals Control, Ground Control Station The platform provides a high performance basis for electromechanical system control. Originally designed for autonomous aerial vehicle
Design of Tracked Robot with Remote Control for Surveillance
 Proceedings of the 2014 International Conference on Advanced Mechatronic Systems, Kumamoto, Japan, August 10-12, 2014 Design of Tracked Robot with Remote Control for Surveillance Widodo Budiharto School
Proceedings of the 2014 International Conference on Advanced Mechatronic Systems, Kumamoto, Japan, August 10-12, 2014 Design of Tracked Robot with Remote Control for Surveillance Widodo Budiharto School
Gael Force FRC Team 126
 Gael Force FRC Team 126 2018 FIRST Robotics Competition 2018 Robot Information and Specs Judges Information Packet Gael Force is proof that one team from a small town can have an incredible impact on many
Gael Force FRC Team 126 2018 FIRST Robotics Competition 2018 Robot Information and Specs Judges Information Packet Gael Force is proof that one team from a small town can have an incredible impact on many
ZZxD-Nx-xR Series. Wireless Modbus I/O B&B ELECTRONICS PRODUCT INFORMATION
 Modular, Customizable Wire Replacement Modbus ASCII /RTU Compatible Wide Operating Temperature Active Repeater Functionality 10 to 48 VDC & 24 VAC Input Power Zlinx Wireless Modbus I/O - flexible enough
Modular, Customizable Wire Replacement Modbus ASCII /RTU Compatible Wide Operating Temperature Active Repeater Functionality 10 to 48 VDC & 24 VAC Input Power Zlinx Wireless Modbus I/O - flexible enough
UNIT1. Keywords page 13-14
 UNIT1 Keywords page 13-14 What is a Robot? A robot is a machine that can do the work of a human. Robots can be automatic, or they can be computer-controlled. Robots are a part of everyday life. Most robots
UNIT1 Keywords page 13-14 What is a Robot? A robot is a machine that can do the work of a human. Robots can be automatic, or they can be computer-controlled. Robots are a part of everyday life. Most robots
A Solution for Every Application. Trimble GNSS Geodetic Antennas TRANSFORMING THE WAY THE WORLD WORKS
 A Solution for Every Application Trimble GNSS Geodetic Antennas TRANSFORMING THE WAY THE WORLD WORKS Trimble GNSS Geodetic Antennas Trimble geodetic antennas mitigate multipath in different ways. Each
A Solution for Every Application Trimble GNSS Geodetic Antennas TRANSFORMING THE WAY THE WORLD WORKS Trimble GNSS Geodetic Antennas Trimble geodetic antennas mitigate multipath in different ways. Each
Long Range Wireless OSD 5.8G FPV Transmitter
 Long Range Wireless OSD 5.8G FPV Transmitter Built-in 10 Axis AHRS + MAVLINK + 600mW Support all flight controller and GPS 1 / 14 User's Guide Catalogue Product Instruction 3 Features 3 Specifications.4
Long Range Wireless OSD 5.8G FPV Transmitter Built-in 10 Axis AHRS + MAVLINK + 600mW Support all flight controller and GPS 1 / 14 User's Guide Catalogue Product Instruction 3 Features 3 Specifications.4
School of Engineering Science Burnaby, BC V5A 1S6
 School of Engineering Science Burnaby, BC V5A 1S6 staircraft-340@sfu.ca November 9, 2000 Dr. Andrew Rawicz School of Engineering Science Simon Fraser University Burnaby, British Columbia V5A 1S6 Re: ENSC
School of Engineering Science Burnaby, BC V5A 1S6 staircraft-340@sfu.ca November 9, 2000 Dr. Andrew Rawicz School of Engineering Science Simon Fraser University Burnaby, British Columbia V5A 1S6 Re: ENSC
II. MAIN BLOCKS OF ROBOT
 AVR Microcontroller Based Wireless Robot For Uneven Surface Prof. S.A.Mishra 1, Mr. S.V.Chinchole 2, Ms. S.R.Bhagat 3 1 Department of EXTC J.D.I.E.T Yavatmal, Maharashtra, India. 2 Final year EXTC J.D.I.E.T
AVR Microcontroller Based Wireless Robot For Uneven Surface Prof. S.A.Mishra 1, Mr. S.V.Chinchole 2, Ms. S.R.Bhagat 3 1 Department of EXTC J.D.I.E.T Yavatmal, Maharashtra, India. 2 Final year EXTC J.D.I.E.T
Intelligent Tactical Robotics
 Intelligent Tactical Robotics Samana Jafri 1,Abbas Zair Naqvi 2, Manish Singh 3, Akhilesh Thorat 4 1 Dept. Of Electronics and telecommunication, M.H. Saboo Siddik College Of Engineering, Mumbai University
Intelligent Tactical Robotics Samana Jafri 1,Abbas Zair Naqvi 2, Manish Singh 3, Akhilesh Thorat 4 1 Dept. Of Electronics and telecommunication, M.H. Saboo Siddik College Of Engineering, Mumbai University
Hardware Implementation of an Explorer Bot Using XBEE & GSM Technology
 Volume 118 No. 20 2018, 4337-4342 ISSN: 1314-3395 (on-line version) url: http://www.ijpam.eu ijpam.eu Hardware Implementation of an Explorer Bot Using XBEE & GSM Technology M. V. Sai Srinivas, K. Yeswanth,
Volume 118 No. 20 2018, 4337-4342 ISSN: 1314-3395 (on-line version) url: http://www.ijpam.eu ijpam.eu Hardware Implementation of an Explorer Bot Using XBEE & GSM Technology M. V. Sai Srinivas, K. Yeswanth,
ON STAGE PERFORMER TRACKING SYSTEM
 ON STAGE PERFORMER TRACKING SYSTEM Salman Afghani, M. Khalid Riaz, Yasir Raza, Zahid Bashir and Usman Khokhar Deptt. of Research and Development Electronics Engg., APCOMS, Rawalpindi Pakistan ABSTRACT
ON STAGE PERFORMER TRACKING SYSTEM Salman Afghani, M. Khalid Riaz, Yasir Raza, Zahid Bashir and Usman Khokhar Deptt. of Research and Development Electronics Engg., APCOMS, Rawalpindi Pakistan ABSTRACT
Roborodentia Final Report
 California Polytechnic State University, SLO College of Engineering Computer Engineering Program Roborodentia Final Report Submitted by: Zeph Nord, Mitchell Myjak, Trevor Gesell June 2018 Faculty Advisor:
California Polytechnic State University, SLO College of Engineering Computer Engineering Program Roborodentia Final Report Submitted by: Zeph Nord, Mitchell Myjak, Trevor Gesell June 2018 Faculty Advisor:
The Robot Builder's Shield for Arduino
 The Robot Builder's Shield for Arduino by Ro-Bot-X Designs Introduction. The Robot Builder's Shield for Arduino was especially designed to make building robots with Arduino easy. The built in dual motors
The Robot Builder's Shield for Arduino by Ro-Bot-X Designs Introduction. The Robot Builder's Shield for Arduino was especially designed to make building robots with Arduino easy. The built in dual motors
Midway Design Review. Search And Find Emergency Drone SAFE Drone. Team 4 December 5, 2016
 Midway Design Review Search And Find Emergency Drone SAFE Drone Team 4 December 5, 2016 Advisor: Professor Leonard 1 Team Members Jamie Kline, EE Serena Thomas, EE Brad Marszalkowski, EE Bjorn Galaske,
Midway Design Review Search And Find Emergency Drone SAFE Drone Team 4 December 5, 2016 Advisor: Professor Leonard 1 Team Members Jamie Kline, EE Serena Thomas, EE Brad Marszalkowski, EE Bjorn Galaske,
* Intelli Robotic Wheel Chair for Specialty Operations & Physically Challenged
 ADVANCED ROBOTICS SOLUTIONS * Intelli Mobile Robot for Multi Specialty Operations * Advanced Robotic Pick and Place Arm and Hand System * Automatic Color Sensing Robot using PC * AI Based Image Capturing
ADVANCED ROBOTICS SOLUTIONS * Intelli Mobile Robot for Multi Specialty Operations * Advanced Robotic Pick and Place Arm and Hand System * Automatic Color Sensing Robot using PC * AI Based Image Capturing
Final Review Powerpoint
 Final Review Powerpoint Simple Machines- A device that makes work easier, faster, or changes the direction of force using few or no moving parts Rube Goldberg- a complex machine that does a simple task
Final Review Powerpoint Simple Machines- A device that makes work easier, faster, or changes the direction of force using few or no moving parts Rube Goldberg- a complex machine that does a simple task
SPECIFICATION. MIMO Single Band 2.4GHz. ISM Bands/ZigBee/WLAN/Bluetooth. High Isolation between Antenna Elements. UV and vandal resistant PE housing
 SPECIFICATION Part No. : MA515.C.CG.001 Product Name : Heavy Duty Screw Mount Antenna MIMO Single Band 2.4GHz Features : 2.4GHz suitable for ISM Bands/ZigBee/WLAN/Bluetooth IEEE.802.11n High Isolation
SPECIFICATION Part No. : MA515.C.CG.001 Product Name : Heavy Duty Screw Mount Antenna MIMO Single Band 2.4GHz Features : 2.4GHz suitable for ISM Bands/ZigBee/WLAN/Bluetooth IEEE.802.11n High Isolation
Design and Implementation of FPGA Based Quadcopter
 Design and Implementation of FPGA Based Quadcopter G Premkumar 1 SCSVMV, Kanchipuram, Tamil Nadu, INDIA R Jayalakshmi 2 Assistant Professor, SCSVMV, Kanchipuram, Tamil Nadu, INDIA Md Akramuddin 3 Project
Design and Implementation of FPGA Based Quadcopter G Premkumar 1 SCSVMV, Kanchipuram, Tamil Nadu, INDIA R Jayalakshmi 2 Assistant Professor, SCSVMV, Kanchipuram, Tamil Nadu, INDIA Md Akramuddin 3 Project
Performance Analysis of Ultrasonic Mapping Device and Radar
 Volume 118 No. 17 2018, 987-997 ISSN: 1311-8080 (printed version); ISSN: 1314-3395 (on-line version) url: http://www.ijpam.eu ijpam.eu Performance Analysis of Ultrasonic Mapping Device and Radar Abhishek
Volume 118 No. 17 2018, 987-997 ISSN: 1311-8080 (printed version); ISSN: 1314-3395 (on-line version) url: http://www.ijpam.eu ijpam.eu Performance Analysis of Ultrasonic Mapping Device and Radar Abhishek
Easy Input Helper Documentation
 Easy Input Helper Documentation Introduction Easy Input Helper makes supporting input for the new Apple TV a breeze. Whether you want support for the siri remote or mfi controllers, everything that is
Easy Input Helper Documentation Introduction Easy Input Helper makes supporting input for the new Apple TV a breeze. Whether you want support for the siri remote or mfi controllers, everything that is
1.0 Introduction. Related Products and Documentation
 Quick Start t Guide ER450 Data Radio 1.0 Introduction Welcome to the Quick Start Guide for the ER450 Data Radio. This guide provides step-by-step instructions, with simple explanations to get you up-and-running.
Quick Start t Guide ER450 Data Radio 1.0 Introduction Welcome to the Quick Start Guide for the ER450 Data Radio. This guide provides step-by-step instructions, with simple explanations to get you up-and-running.
Figure 1. Overall Picture
 Jormungand, an Autonomous Robotic Snake Charles W. Eno, Dr. A. Antonio Arroyo Machine Intelligence Laboratory University of Florida Department of Electrical Engineering 1. Introduction In the Intelligent
Jormungand, an Autonomous Robotic Snake Charles W. Eno, Dr. A. Antonio Arroyo Machine Intelligence Laboratory University of Florida Department of Electrical Engineering 1. Introduction In the Intelligent
Activity 2 Wave the Flag. Student Guide. Activity Overview. Robotics Jargon. Materials Needed. Building the Robot
 Activity Overview In this activity, you will learn about pivot points and integrate a servo motor into your robot to create a pivot point capable of waving a flag. After building the robot, you will conduct
Activity Overview In this activity, you will learn about pivot points and integrate a servo motor into your robot to create a pivot point capable of waving a flag. After building the robot, you will conduct
Activity 2 Wave the Flag. Student Guide. Activity Overview. Robotics Jargon. Materials Needed. Building the Robot
 Activity Overview In this activity, you will learn about pivot points and integrate a servo motor into your robot to create a pivot point capable of waving a flag. After building the robot, you will conduct
Activity Overview In this activity, you will learn about pivot points and integrate a servo motor into your robot to create a pivot point capable of waving a flag. After building the robot, you will conduct
International Journal of Scientific & Engineering Research, Volume 8, Issue 1, January ISSN
 International Journal of Scientific & Engineering Research, Volume 8, Issue 1, January-2017 500 DESIGN AND FABRICATION OF VOICE CONTROLLED UNMANNED AERIAL VEHICLE Author-Shubham Maindarkar, Co-author-
International Journal of Scientific & Engineering Research, Volume 8, Issue 1, January-2017 500 DESIGN AND FABRICATION OF VOICE CONTROLLED UNMANNED AERIAL VEHICLE Author-Shubham Maindarkar, Co-author-
Chassis & Attachments 101. Chassis Overview
 Chassis & Attachments 101 Chassis Overview 2016 1 Introductions Rest rooms location. Food and Drink: Complementary bottled water. Snacks available for purchase from UME FTC teams. Cell phones. Today presentation
Chassis & Attachments 101 Chassis Overview 2016 1 Introductions Rest rooms location. Food and Drink: Complementary bottled water. Snacks available for purchase from UME FTC teams. Cell phones. Today presentation
Android Phone Based Assistant System for Handicapped/Disabled/Aged People
 IJIRST International Journal for Innovative Research in Science & Technology Volume 3 Issue 10 March 2017 ISSN (online): 2349-6010 Android Phone Based Assistant System for Handicapped/Disabled/Aged People
IJIRST International Journal for Innovative Research in Science & Technology Volume 3 Issue 10 March 2017 ISSN (online): 2349-6010 Android Phone Based Assistant System for Handicapped/Disabled/Aged People
GE423 Laboratory Assignment 6 Robot Sensors and Wall-Following
 GE423 Laboratory Assignment 6 Robot Sensors and Wall-Following Goals for this Lab Assignment: 1. Learn about the sensors available on the robot for environment sensing. 2. Learn about classical wall-following
GE423 Laboratory Assignment 6 Robot Sensors and Wall-Following Goals for this Lab Assignment: 1. Learn about the sensors available on the robot for environment sensing. 2. Learn about classical wall-following
# Made In USA. Simple GPS Tracker Parts List. Needed Tools and Materials
 Needed Tools and Materials #09245 Made In USA Compatible Ebay (to mount electronics to) Drill and Screwdriver (for mounting Transmitter to ebay) Compatible Battery (for powering Airborne Transmitter) Optional
Needed Tools and Materials #09245 Made In USA Compatible Ebay (to mount electronics to) Drill and Screwdriver (for mounting Transmitter to ebay) Compatible Battery (for powering Airborne Transmitter) Optional