Chassis & Attachments 101. Chassis Overview
|
|
|
- Georgina Shelton
- 5 years ago
- Views:
Transcription
1 Chassis & Attachments 101 Chassis Overview


2 Introductions Rest rooms location. Food and Drink: Complementary bottled water. Snacks available for purchase from UME FTC teams. Cell phones. Today presentation available at: 2
 Everything you compete with must be made of LEGO elements in original factory condition, except LEGO string and tubing, which you may cut to length.")
3 What can be used to build your robot? Read the Robot Game Rules! (Page 16) Everything you compete with must be made of LEGO elements in original factory condition, except LEGO string and tubing, which you may cut to length. Exception: You can reference a paper list to keep track of programs and use a bin to carry your robot. There are no restrictions on the quantities or sources of non electric LEGO elements, except that factory made wind up/pull back motors are not allowed. 3

4 What can be used to build your robot? LEGO pneumatic elements are allowed. On the robot, marker may be used for owner identification in hidden areas only. Paint, tape, glue, oil, dry lubrication, etc. are not allowed. Stickers are not allowed except LEGO stickers applied per LEGO instructions. 4
5 Rule Changes for 2016 There is no Safety region. The whole quarter-circle region is all Base. The inner curved line is meaningless now. On-Field Storage outside Base no longer allowed. The ceiling of Base has been removed, so there is no limit on how tall a Robot may be. Transported objects partly in Base when the Robot is interrupted (moved by hand) are always given to the Ref, and are out of play. Stranded objects partly in Base are always given to the Ref, and are out of play. If the Robot is interrupted transporting an object not completely in Base, the Ref removes the object from play no matter what. There is no Junk penalty. 5
6 What can be used to build your robot? The electric elements used must be the LEGO MINDSTORMS type, and the total number of electric elements you may use in one match is limited as follows: One Controller (RCX, NXT, or EV3) Four Motors - Must be MINDSTORMS motors A fifth motor is not permitted in the competition area (you may have unlimited spare motors at the pit area) Unlimited Sensors Must be Touch, Light, Color, Rotation, Ultrasonic, or Gyro sensor Must be LEGO manufactured MINDSTORMS sensors 6

7 Achieving Robot Performance Robot Design Teams that are consistently top performers are always balanced in robot design, programming, and strategy. F Teams will naturally be stronger in one area, but to neglect the other areas will result in inconstant results. Programming Strategy FLL Core Values 7
8 Strategy Great robot design + poor strategy = inconsistent scores Fair robot design + good strategy = consistent scores 8
9 Engineering Design Process Ask Ask What is my design supposed to do? How will I test my design? How will I know it is doing what I want? What could keep me from making it do that? Improve Create Imagine Plan 9
10 Engineering Design Process Ask Imagine Apply knowledge and creativity to brainstorm ideas. Select one to try. Plan Plan idea with sketches, diagrams, drawings and notes. Plan materials and resources. Improve Create Imagine Plan 10

11 Engineering Design Process Ask Create Create a prototype. Test the prototype and record the results. Improve Imagine Create Plan 11
12 Design Process Ask Improve Analyze design and test results. What change would make the biggest impact on meeting the goal? Apply knowledge and creativity to brainstorm ideas. Improve Create Imagine Plan 12
13 Common Attributes of FLL Robots Two motors are used for the drive wheels, one on each side for turning The third and fourth motors for attachments such as a vertical lift, arm mechanism, or attachments Multiple attachments for different missions Robots must fit inside the base, no height requirement this year Attachments are removable Mechanisms are not 13
14 Robot Design Executive Summary and FLL Robot Design Rubric The Robot Design Executive Summary and Robot Design Rubrics are available at 14
15 Robot Design Executive Summary (RDES) Design Details Outline 1. Fun: Describe the most fun or interesting part of robot design as well as the most challenging parts. If your robot has a name, who chose the name and why. 2. Strategy: Explain your team s strategy and reasoning for choosing and accomplishing missions. 3. Design Process: Describe how your team designed your robot and what process you used to make improvements to your design over time. 4. Mechanical Design: Explain to the judges your robot s basic structure, how you make sure your robot is durable and how you made it easy to repair or add/remove attachments. 5. Programming: Describe how you programmed your robot to ensure consistent results. 6. Innovation: Describe any features of your robot design that you feel are special, different or especially clever. 15

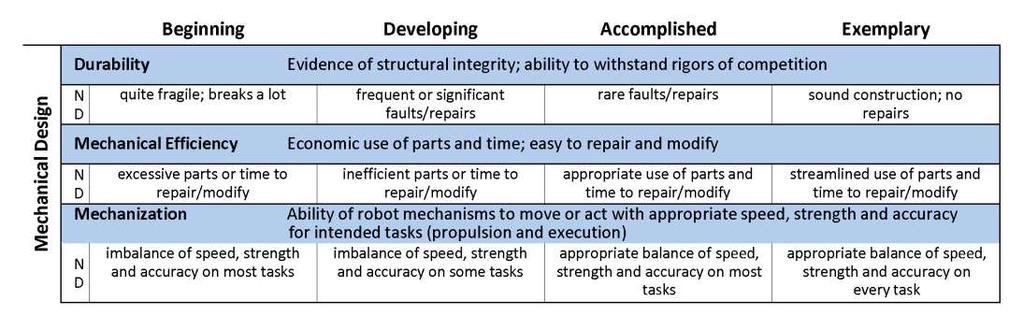
16 FLL Robot Design Rubrics 16
17 Chassis Durability Evidence of structural integrity; ability to withstand rigors of competition Accomplished: Rare faults/repairs Exemplary: Sound Construction; No Repairs Things to ask about your robot: Does my robot stay together during routine handling? Does my robot have excessive flex when moving? Does my robot wheels remain in contact with the mat? 17
18 Chassis Mechanical Efficiency Economic use of parts and time; easy to repair and modify Accomplished: Appropriate use of parts and time to modify/repair Exemplary: Streamlined Use of Parts and time to repair/modify Can the batteries be change/charged easily? Can I see the display screen and push the buttons? Can I plug/unplug wires easily? Are the wires in the way? Can attachments be changed easily? How long does it take to set up my robot in base? 18
19 Chassis Mechanical Efficiency Robot Setup Know Where to Start! The base is bigger than it appears, where does the robot go? When positioning the robot, the angle the robot is heading is very important. If the heading is off by 1 degree, four feet (half the length of the field) from the start, the robot will be off course by over 1 ½ inches 19
20 Chassis Mechanical Efficiency Even robots that self correct position need to have a consistent starting point Proper starting position includes powered mechanisms and attachments, everything must start within base Alignment tools, such as robot bumpers and jigs help if built properly and consistently used 20
21 Chassis Mechanization Ability of robot mechanisms to move or act with appropriate speed, strength and accuracy for intended tasks (propulsion and execution) Accomplished: Appropriate balance of speed, strength, and accuracy on most tasks. Exemplary: Appropriate Balance of Speed and Strength on Every Task 21
22 Chassis Mechanization Does the robot have the right wheels? Big wheels are faster, can move over obstacles, but can be less accurate. Wider tires have more friction than skinny tires making turning less repeatable Where is the Center of Gravity (CG) of the robot? Is the robot top heavy? How will the robot s CG change when it picks up loads? Do the robot avoid tipping on slopes, sharp turns, stops, or in collisions What happens when the robot backs up? 22


23 Chassis Basics 23
24 Chassis styles 2 wheels and skid(s) - usually fine if no ramps to climb 2 wheels and caster wheel (3-point design) - caster wheel can change robot course (supermarket carts) 2 wheels and caster ball (3-point design) 4 wheels (4-point design) - often one pair is without tires to slide while pivoting 6 wheels - Larger than most FLL robots, robot must fit in base. Treads - stable, can be hard to predict turns Exotics walking, time consuming to build, inconsistent movement 24

25 Chassis mobility Size of chassis the robot has to navigate around the obstacles on robot field 25
26 Chassis mobility A bigger chassis require more motor power draining batteries quicker Remember, after the robot is built, you still need to get to the battery compartment or charging plug on the brick Chassis will need places for attachments to attach Wires from brick to motor and sensors should be tucked away so they don t catch on anything 26
27 Chassis mobility Will gears help? Little gear on motor and big gear on attachment or wheel Slower More precise More torque Big gear on motor and little gear on attachment or wheel Faster Less precise Less torque 27
28 Wheels, Tracks and Axle tips Tracks Low Friction/High Slippage Motion and Turns not repeatable Large wheels go further per revolution Friction varies with different wheels Consider how they pivot turn and go straight Wheel Axle Support More support, less wiggle/sag Support from both sides is best 28

29 Wheel support 29


30 Wheel Support - Poor Wheels should be mounted close to supporting beam, but not rubbing against it 2 full bushings and 1 half bushing 30

31 Wheel Support - Better 1 halve bushing 3M Beam with 2 black friction pegs 31


32 Wheel Support - Best Beams on both sides provides the best support 32

33 Navigation 33
34 Building to go straight Straight motion Wheel balance Wheel alignment 34
35 Robot placement Jigs / Robot bumpers / Alignment tools Align with solid edges of robot, not by sight Provide three points of contact to get both the angle and front/back positions correct Jig / Alignment tool can't interfere with robot as it begins to move Table walls may vary. South edge of mat is always against the south wall, but east and west are center, and north falls wherever 35
36 Three types of turns The robot will turn when one wheel moves at a different speed from the other The greater the difference in wheel speeds, the tighter the turn Pinpoint - robot spins around a point (tank turn) Pivot - robot turns about a fixed wheel Curved - robot turns about an arc 36


37 Pivot turn left BREAK Powering the right wheel while breaking the left will cause the robot to turn right. 37

38 Pivot turn right Powering the left wheel while breaking the right will cause the robot to turn right. BREAK 38


39 Consistent Steering Tips Reduce friction Remove tires from rims Use EV3 caster in place of non-powered wheels Brake stationary wheel on pivot turns 39
40 Pinpoint turn Powering the wheels in opposite directions will rotate the robot around the mid-point of the axle. 40

41 Curved turn Powering one wheel less will turn the robot in the direction of that wheel. The great the difference in power the more the turn. 41

")
42 Navigation methods Wall following Horizontal guide wheels Approach wall at shallow angle EV3 Gyro Countering Draft (Covered in Programming clinic) 42
43 Navigation methods Line following For greatest accuracy, box light sensors to eliminate (as much as possible) ambient light. Use the light generated by the light sensor itself Calibration can help to reduce the effect of changes in external lighting, but is hard to eliminate Light sensors tend to hunt pivoting on one wheel (instead of two) tends to be less jittery and make faster progress Take advantage of knowing the proper course for the mission not a general purpose line follower 43
44 Online Lego Educational: Go to the "SHOP" menu and then select "LEGO Spare Parts and Accessories BrickLink: Brick Owl: Gears: LEGO Digital Designer: CAD for LEGOs Techbrick: BrickSet: 44
Chassis & Attachments 101. Part 1: Chassis Overview
 Chassis & Attachments 101 Part 1: Chassis Overview 2017 1 Introductions Rest rooms location. Food and Drink. Cell phones. Today presentation available at: http://www.roboplex.org/fll 2 What can be used
Chassis & Attachments 101 Part 1: Chassis Overview 2017 1 Introductions Rest rooms location. Food and Drink. Cell phones. Today presentation available at: http://www.roboplex.org/fll 2 What can be used
FLL Coaches Clinic Chassis and Attachments. Patrick R. Michaud
 FLL Coaches Clinic Chassis and Attachments Patrick R. Michaud pmichaud@pobox.com Erik Jonsson School of Engineering and Computer Science University of Texas at Dallas September 23, 2017 Presentation Outline
FLL Coaches Clinic Chassis and Attachments Patrick R. Michaud pmichaud@pobox.com Erik Jonsson School of Engineering and Computer Science University of Texas at Dallas September 23, 2017 Presentation Outline
2015 Maryland State 4-H LEGO Robotic Challenge
 Trash Talk Utilizing Trash to Power the World 2015 Maryland State 4-H LEGO Robotic Challenge Through Trash Talk, 4-H members involved in robotics will create LEGO robots that complete tasks related to
Trash Talk Utilizing Trash to Power the World 2015 Maryland State 4-H LEGO Robotic Challenge Through Trash Talk, 4-H members involved in robotics will create LEGO robots that complete tasks related to
Deriving Consistency from LEGOs
 Deriving Consistency from LEGOs What we have learned in 6 years of FLL and 7 years of Lego Robotics by Austin and Travis Schuh 1 2006 Austin and Travis Schuh, all rights reserved Objectives Basic Building
Deriving Consistency from LEGOs What we have learned in 6 years of FLL and 7 years of Lego Robotics by Austin and Travis Schuh 1 2006 Austin and Travis Schuh, all rights reserved Objectives Basic Building
The Nomenclature and Geometry of LEGO
 The Nomenclature and Geometry of LEGO AN OVERVIEW OF LEGO EV3 MINDSTORMS ELEMENTS AND HOW THEY WORK TOGETHER UPDATED 9/27/2015 Required Stuff Please do not wander the building. Rest Rooms Location. Food
The Nomenclature and Geometry of LEGO AN OVERVIEW OF LEGO EV3 MINDSTORMS ELEMENTS AND HOW THEY WORK TOGETHER UPDATED 9/27/2015 Required Stuff Please do not wander the building. Rest Rooms Location. Food
FLL Programming Workshop Series
 FLL Programming 2017 Workshop Series 2017 1 Prerequisites & Equipment Required Basic computer skills Assembled EV3 Educational robot or equivalent Computer or Laptop with LEGO Mindstorms software installed
FLL Programming 2017 Workshop Series 2017 1 Prerequisites & Equipment Required Basic computer skills Assembled EV3 Educational robot or equivalent Computer or Laptop with LEGO Mindstorms software installed
BUILDING A COMPETITION ROBOT SESHAN BROTHERS
 BUILDING A COMPETITION ROBOT SESHAN BROTHERS OUR RULES FOR ROBOT DESIGN RULE #1: Take your time to build your base robot before jumping into attachment building and solving missions. RULE #2: If you are
BUILDING A COMPETITION ROBOT SESHAN BROTHERS OUR RULES FOR ROBOT DESIGN RULE #1: Take your time to build your base robot before jumping into attachment building and solving missions. RULE #2: If you are
2018 First Responders 4-H Robotics Challenge Page 1
 2018 First Responders 4-H Robotics Challenge Page 1 Contents 2018 First Responders 4-H Robotics Challenge... 3 1 Teams... 3 2 The Game... 3 2.1 Competition kit... 3 2.2 Field Mat... 3 2.3 Playing Field...
2018 First Responders 4-H Robotics Challenge Page 1 Contents 2018 First Responders 4-H Robotics Challenge... 3 1 Teams... 3 2 The Game... 3 2.1 Competition kit... 3 2.2 Field Mat... 3 2.3 Playing Field...
FIRST LEGO LEAGUE. PowerUp Summer Game. Presented by FRC 6328
 FIRST LEGO LEAGUE PowerUp Summer Game 2018 Presented by FRC 6328 FLL POWER UP OVERVIEW The purpose of the FLL PowerUP game is to provide an engaging summer program for FLL students that will help prepare
FIRST LEGO LEAGUE PowerUp Summer Game 2018 Presented by FRC 6328 FLL POWER UP OVERVIEW The purpose of the FLL PowerUP game is to provide an engaging summer program for FLL students that will help prepare
MN High School Robotics 2006 MISSIONS
 MN High School Robotics 2006 MISSIONS ATOMIC FORCE MICROSCOPY Mission: Free the probe s nanotip. The robot must separate the nanotip from the material surface. The nanotip separated from the surface is
MN High School Robotics 2006 MISSIONS ATOMIC FORCE MICROSCOPY Mission: Free the probe s nanotip. The robot must separate the nanotip from the material surface. The nanotip separated from the surface is
LEGO Mindstorms Class: Lesson 1
 LEGO Mindstorms Class: Lesson 1 Some Important LEGO Mindstorm Parts Brick Ultrasonic Sensor Light Sensor Touch Sensor Color Sensor Motor Gears Axle Straight Beam Angled Beam Cable 1 The NXT-G Programming
LEGO Mindstorms Class: Lesson 1 Some Important LEGO Mindstorm Parts Brick Ultrasonic Sensor Light Sensor Touch Sensor Color Sensor Motor Gears Axle Straight Beam Angled Beam Cable 1 The NXT-G Programming
Where C= circumference, π = 3.14, and D = diameter EV3 Distance. Developed by Joanna M. Skluzacek Wisconsin 4-H 2016 Page 1
 Instructor Guide Title: Distance the robot will travel based on wheel size Introduction Calculating the distance the robot will travel for each of the duration variables (rotations, degrees, seconds) can
Instructor Guide Title: Distance the robot will travel based on wheel size Introduction Calculating the distance the robot will travel for each of the duration variables (rotations, degrees, seconds) can
Robot Design.
 Robot Design Michael Hartwig kcfllref@gmail.com Agenda 2016 KC Region robots Design Elements and Process Robot Design Attachment Design Missions Demonstration Resources Questions 9/9/2017 2017 KC FLL Coaches
Robot Design Michael Hartwig kcfllref@gmail.com Agenda 2016 KC Region robots Design Elements and Process Robot Design Attachment Design Missions Demonstration Resources Questions 9/9/2017 2017 KC FLL Coaches
LEGO BASED CHALLENGE. 1. Material
 LEGO BASED CHALLENGE 1. Material 1. The controller, motors and sensors used to assemble robots must be from LEGO MINDSTORMS sets (NXT or EV3). 2. Only LEGO branded elements may be used to construct the
LEGO BASED CHALLENGE 1. Material 1. The controller, motors and sensors used to assemble robots must be from LEGO MINDSTORMS sets (NXT or EV3). 2. Only LEGO branded elements may be used to construct the
2017/2018. Challenge Guide
 2017/2018 Challenge Guide The Robot Game 2017/2018 Robot Game Rules Guiding Principles GP1 - GRACIOUS PROFESSIONALISM You are Gracious Professionals. You compete hard against problems, while treating all
2017/2018 Challenge Guide The Robot Game 2017/2018 Robot Game Rules Guiding Principles GP1 - GRACIOUS PROFESSIONALISM You are Gracious Professionals. You compete hard against problems, while treating all
Team #3691 FLL Technical Manual. Ashburn Robotics NXTreme (Team#3691)
") FLL 2010-11 Team #3691 http://www.ashburnrobotics.com/ TechManual NXTreme 3691 - FLL 2010-11.doc Body Forward Page 1 of 44 TechManual NXTreme 3691 - FLL 2010-11.doc Body Forward Page 2 of 44 Ashburn Robotics
FLL 2010-11 Team #3691 http://www.ashburnrobotics.com/ TechManual NXTreme 3691 - FLL 2010-11.doc Body Forward Page 1 of 44 TechManual NXTreme 3691 - FLL 2010-11.doc Body Forward Page 2 of 44 Ashburn Robotics
Robotics Workshop. for Parents and Teachers. September 27, 2014 Wichita State University College of Engineering. Karen Reynolds
 Robotics Workshop for Parents and Teachers September 27, 2014 Wichita State University College of Engineering Steve Smith Christa McAuliffe Academy ssmith3@usd259.net Karen Reynolds Wichita State University
Robotics Workshop for Parents and Teachers September 27, 2014 Wichita State University College of Engineering Steve Smith Christa McAuliffe Academy ssmith3@usd259.net Karen Reynolds Wichita State University
Competition Arena Rules Revised March 21, 2017
 Competition Arena Rules Revised March 21, 2017 General Rules GR1 Only one robot per team will be allowed in the tournament. Backup robots will NOT be allowed. Teams found in violation will not be allowed
Competition Arena Rules Revised March 21, 2017 General Rules GR1 Only one robot per team will be allowed in the tournament. Backup robots will NOT be allowed. Teams found in violation will not be allowed
Gael Force FRC Team 126
 Gael Force FRC Team 126 2018 FIRST Robotics Competition 2018 Robot Information and Specs Judges Information Packet Gael Force is proof that one team from a small town can have an incredible impact on many
Gael Force FRC Team 126 2018 FIRST Robotics Competition 2018 Robot Information and Specs Judges Information Packet Gael Force is proof that one team from a small town can have an incredible impact on many
Pre-Activity Quiz. building a robot to fight another robot by trying to push it out of a ring? in the competition? the way when racing?
 Sumobot - RaceCar Challenge Pre-Activity Quiz 1. What must you keep in mind when building a robot to fight another robot by trying to push it out of a ring? 2. How can you use gears to your advantage in
Sumobot - RaceCar Challenge Pre-Activity Quiz 1. What must you keep in mind when building a robot to fight another robot by trying to push it out of a ring? 2. How can you use gears to your advantage in
Robotics using Lego Mindstorms EV3 (Intermediate)
") Robotics using Lego Mindstorms EV3 (Intermediate) Facebook.com/roboticsgateway @roboticsgateway Robotics using EV3 Are we ready to go Roboticists? Does each group have at least one laptop? Do you have
Robotics using Lego Mindstorms EV3 (Intermediate) Facebook.com/roboticsgateway @roboticsgateway Robotics using EV3 Are we ready to go Roboticists? Does each group have at least one laptop? Do you have
Hare and Snail Challenges READY, GO!
 Hare and Snail Challenges READY, GO! Pre-Activity Quiz 1. What are some design considerations to make a fast robot? 2. What are some design considerations to make a slow robot? 2 Pre-Activity Quiz Answers
Hare and Snail Challenges READY, GO! Pre-Activity Quiz 1. What are some design considerations to make a fast robot? 2. What are some design considerations to make a slow robot? 2 Pre-Activity Quiz Answers
Erik Von Burg Mesa Public Schools Gifted and Talented Program Johnson Elementary School
 Erik Von Burg Mesa Public Schools Gifted and Talented Program Johnson Elementary School elvonbur@mpsaz.org Water Sabers (2008)* High Heelers (2009)* Helmeteers (2009)* Cyber Sleuths (2009)* LEGO All Stars
Erik Von Burg Mesa Public Schools Gifted and Talented Program Johnson Elementary School elvonbur@mpsaz.org Water Sabers (2008)* High Heelers (2009)* Helmeteers (2009)* Cyber Sleuths (2009)* LEGO All Stars
Strategic Design. Michael Corsetto
 Strategic Design Michael Corsetto Training Golden Rule #3 Steal From The Best, Invent The Rest Get Team familiar with past games and robots Games will often be similar to past games Examples: 2004, 2010,
Strategic Design Michael Corsetto Training Golden Rule #3 Steal From The Best, Invent The Rest Get Team familiar with past games and robots Games will often be similar to past games Examples: 2004, 2010,
Sumo-bot Competition Rules
 Sumo-bot Competition Rules Location: Guadalupe County Agricultural Extension Office, 210 Live Oak, Seguin, TX 78155 Date and Time: December 2, 2017 from 9-2 PM doors open at 9AM Check in and Inspections:
Sumo-bot Competition Rules Location: Guadalupe County Agricultural Extension Office, 210 Live Oak, Seguin, TX 78155 Date and Time: December 2, 2017 from 9-2 PM doors open at 9AM Check in and Inspections:
Pre-Activity Quiz. 2 feet forward in a straight line? 1. What is a design challenge? 2. How do you program a robot to move
 Maze Challenge Pre-Activity Quiz 1. What is a design challenge? 2. How do you program a robot to move 2 feet forward in a straight line? 2 Pre-Activity Quiz Answers 1. What is a design challenge? A design
Maze Challenge Pre-Activity Quiz 1. What is a design challenge? 2. How do you program a robot to move 2 feet forward in a straight line? 2 Pre-Activity Quiz Answers 1. What is a design challenge? A design
Toeing the Line Experiments with Line-following Algorithms
 Toeing the Line Experiments with Line-following Algorithms Grade 9 Contents Abstract... 2 Introduction... 2 Purpose... 2 Hypothesis... 3 Materials... 3 Setup... 4 Programming the robot:...4 Building the
Toeing the Line Experiments with Line-following Algorithms Grade 9 Contents Abstract... 2 Introduction... 2 Purpose... 2 Hypothesis... 3 Materials... 3 Setup... 4 Programming the robot:...4 Building the
The light sensor, rotation sensor, and motors may all be monitored using the view function on the RCX.
 Review the following material on sensors. Discuss how you might use each of these sensors. When you have completed reading through this material, build a robot of your choosing that has 2 motors (connected
Review the following material on sensors. Discuss how you might use each of these sensors. When you have completed reading through this material, build a robot of your choosing that has 2 motors (connected
FLL Robot Design Workshop
 FLL Robot Design Workshop Tool Design and Mechanism Prepared by Dr. C. H. (Tony) Lin Principal Engineer Tire and Vehicle Mechanics Goodyear Tire & Rubber Company tony_lin@goodyear.com Description Mechanism
FLL Robot Design Workshop Tool Design and Mechanism Prepared by Dr. C. H. (Tony) Lin Principal Engineer Tire and Vehicle Mechanics Goodyear Tire & Rubber Company tony_lin@goodyear.com Description Mechanism
Spare Parts. Contents. Contents Contents
 Spare Parts 2013 Spare Parts Contents Contents Contents LEGO Education StoryStarter 3 LEGO Education WeDo 4 Machines and Mechanisms 5 LEGO MINDSTORMS Education 6-8 TETRIX by Pitsco 9-16 LEGOeducation.us
Spare Parts 2013 Spare Parts Contents Contents Contents LEGO Education StoryStarter 3 LEGO Education WeDo 4 Machines and Mechanisms 5 LEGO MINDSTORMS Education 6-8 TETRIX by Pitsco 9-16 LEGOeducation.us
An Introduction to Programming using the NXT Robot:
 An Introduction to Programming using the NXT Robot: exploring the LEGO MINDSTORMS Common palette. Student Workbook for independent learners and small groups The following tasks have been completed by:
An Introduction to Programming using the NXT Robot: exploring the LEGO MINDSTORMS Common palette. Student Workbook for independent learners and small groups The following tasks have been completed by:
Patterns of Building LEGO MINDSTORMS Robots
 Patterns of Building LEGO MINDSTORMS Robots KYLE BROWN, IBM Software Services for WebSphere This paper discusses patterns found in the design and programming of robots built using LEGO MINDSTORMS, particularly
Patterns of Building LEGO MINDSTORMS Robots KYLE BROWN, IBM Software Services for WebSphere This paper discusses patterns found in the design and programming of robots built using LEGO MINDSTORMS, particularly
2019 Illinois 4-H Robotics Challenge: STEMbot
 2019 Illinois 4-H Robotics Challenge: STEMbot Creativity is the Secret Sauce to Science, Technology, Engineering, and Math - Ainissa Ramirez, Science Evangelist This year s challenge revolves around one
2019 Illinois 4-H Robotics Challenge: STEMbot Creativity is the Secret Sauce to Science, Technology, Engineering, and Math - Ainissa Ramirez, Science Evangelist This year s challenge revolves around one
Utah Elementary Robotics Obstacle Course Rules USU Physics Day. Competition at USU Brigham City Campus 989 S Main St Brigham City, UT 84302
 Utah Elementary Robotics Obstacle Course Rules USU Physics Day Competition at USU Brigham City Campus 989 S Main St Brigham City, UT 84302 Starting at 10:00 AM May 2 nd, 2017 COMPETITION OBJECTIVE The
Utah Elementary Robotics Obstacle Course Rules USU Physics Day Competition at USU Brigham City Campus 989 S Main St Brigham City, UT 84302 Starting at 10:00 AM May 2 nd, 2017 COMPETITION OBJECTIVE The
Instructors. Manual GEARED. After-School Robotics Program By Haley Hanson
 Instructors GEARED UP Manual After-School Robotics Program By Haley Hanson Table of Contents Introduction 3 Before you Start 4 Program Overview 5 Proposed Timeline 6 Itemized Materials List and Sample
Instructors GEARED UP Manual After-School Robotics Program By Haley Hanson Table of Contents Introduction 3 Before you Start 4 Program Overview 5 Proposed Timeline 6 Itemized Materials List and Sample
Note to Teacher. Description of the investigation. Time Required. Materials. Procedures for Wheel Size Matters TEACHER. LESSONS WHEEL SIZE / Overview
 In this investigation students will identify a relationship between the size of the wheel and the distance traveled when the number of rotations of the motor axles remains constant. It is likely that many
In this investigation students will identify a relationship between the size of the wheel and the distance traveled when the number of rotations of the motor axles remains constant. It is likely that many
Force multipliers and speed multipliers Machines can make work easier by reducing the amount of force necessary to move an object or increasing the
 MACHINES A machine is a device that makes work easier by transmitting or transforming energy. They have been used since ancient times to help people move heavy objects, bring substances like water from
MACHINES A machine is a device that makes work easier by transmitting or transforming energy. They have been used since ancient times to help people move heavy objects, bring substances like water from
Student Guide Speed challenge and robotics challenge mat
 Student Guide Speed challenge and robotics challenge mat Speed Challenge It s The Speed Challenge! We are really excited about this! It is all about speed. Get your LEGO MINDSTORMS Education EV3 moving
Student Guide Speed challenge and robotics challenge mat Speed Challenge It s The Speed Challenge! We are really excited about this! It is all about speed. Get your LEGO MINDSTORMS Education EV3 moving
Unit 4: Robot Chassis Construction
 Unit 4: Robot Chassis Construction Unit 4: Teacher s Guide Lesson Overview: Paul s robotic assistant needs to operate in a real environment. The size, scale, and capabilities of the TETRIX materials are
Unit 4: Robot Chassis Construction Unit 4: Teacher s Guide Lesson Overview: Paul s robotic assistant needs to operate in a real environment. The size, scale, and capabilities of the TETRIX materials are
Robot Programming Manual
 2 T Program Robot Programming Manual Two sensor, line-following robot design using the LEGO NXT Mindstorm kit. The RoboRAVE International is an annual robotics competition held in Albuquerque, New Mexico,
2 T Program Robot Programming Manual Two sensor, line-following robot design using the LEGO NXT Mindstorm kit. The RoboRAVE International is an annual robotics competition held in Albuquerque, New Mexico,
Appendix Course Notes MIT Course Organizers. Chapter 7: LEGO Design
 EECS40/43 Appendix 4 Appendix 4 6.70 1999 Course Notes MIT 6.70 Course Organizers Chapter 7: LEGO Design 1 Chapter 7 LEGO Design When you're rst introduced to the LEGO Technic system, you may be amazed
EECS40/43 Appendix 4 Appendix 4 6.70 1999 Course Notes MIT 6.70 Course Organizers Chapter 7: LEGO Design 1 Chapter 7 LEGO Design When you're rst introduced to the LEGO Technic system, you may be amazed
Lab book. Exploring Robotics (CORC3303)
") Lab book Exploring Robotics (CORC3303) Dept of Computer and Information Science Brooklyn College of the City University of New York updated: Fall 2011 / Professor Elizabeth Sklar UNIT A Lab, part 1 : Robot
Lab book Exploring Robotics (CORC3303) Dept of Computer and Information Science Brooklyn College of the City University of New York updated: Fall 2011 / Professor Elizabeth Sklar UNIT A Lab, part 1 : Robot
Curriculum Activities for Driving Course Curriculum Sample 1
 Curriculum Activities for Driving Course Curriculum Sample 1 This sample is provided to give you some guidance in developing your own challenges. This mat is meant to serve as an intro to EV3 moves and
Curriculum Activities for Driving Course Curriculum Sample 1 This sample is provided to give you some guidance in developing your own challenges. This mat is meant to serve as an intro to EV3 moves and
Ultimatum. Robotics Unit Lesson 5. Overview
 Robotics Unit Lesson 5 Ultimatum Overview In this final challenge the students will deploy their TETRIX rescue robot up the mountain to rescue the stranded mountain climbers. First the rescue robot has
Robotics Unit Lesson 5 Ultimatum Overview In this final challenge the students will deploy their TETRIX rescue robot up the mountain to rescue the stranded mountain climbers. First the rescue robot has
Robotic Systems Challenge 2013
 Robotic Systems Challenge 2013 An engineering challenge for students in grades 6 12 April 27, 2013 Charles Commons Conference Center JHU Homewood Campus Sponsored by: Johns Hopkins University Laboratory
Robotic Systems Challenge 2013 An engineering challenge for students in grades 6 12 April 27, 2013 Charles Commons Conference Center JHU Homewood Campus Sponsored by: Johns Hopkins University Laboratory
the complete parts reference bricks
 the complete parts reference Here s a detailed overview of all the pieces in your LEGO BOOST kit. You can also identify LEGO elements precisely by their LEGO ID, which is printed on the LEGO BOOST test
the complete parts reference Here s a detailed overview of all the pieces in your LEGO BOOST kit. You can also identify LEGO elements precisely by their LEGO ID, which is printed on the LEGO BOOST test
Introduction to Robotics Rubrics
 Introduction to Robotics Rubrics Students can evaluate their project work according to the learning goals. Each rubric includes four levels: Bronze, Silver, Gold, and Platinum. The intention is to help
Introduction to Robotics Rubrics Students can evaluate their project work according to the learning goals. Each rubric includes four levels: Bronze, Silver, Gold, and Platinum. The intention is to help
acknowledgments...xv introduction...xvii 1 LEGO MINDSTORMS NXT 2.0: people, pieces, and potential getting started with the NXT 2.0 set...
 acknowledgments...xv introduction...xvii about this book...xvii part I: introduction to LEGO MINDSTORMS NXT 2.0...xviii part II: building...xviii part III: programming...xviii part IV: projects...xix companion
acknowledgments...xv introduction...xvii about this book...xvii part I: introduction to LEGO MINDSTORMS NXT 2.0...xviii part II: building...xviii part III: programming...xviii part IV: projects...xix companion
ISONIC PA AUT Spiral Scan Inspection of Tubular Parts Operating Manual and Inspection Procedure Rev 1.00 Sonotron NDT
 ISONIC PA AUT Spiral Scan Inspection of Tubular Parts Operating Manual and Inspection Procedure Rev 1.00 Sonotron NDT General ISONIC PA AUT Spiral Scan Inspection Application was designed on the platform
ISONIC PA AUT Spiral Scan Inspection of Tubular Parts Operating Manual and Inspection Procedure Rev 1.00 Sonotron NDT General ISONIC PA AUT Spiral Scan Inspection Application was designed on the platform
ORTOP Modular Robot v3.0 Arm Assembly
 Base Plate Assembly Parts Needed: Arm Assembly BAG 1 2 Socket Head Cap Screw, 1-1/4" 2 Socket Head Cap Screw, 1/2" 2 Button Head Cap Screw, 3/8" 6 Nuts 1 Gear Hub Spacer 1 Flat Building Plate 1 Single
Base Plate Assembly Parts Needed: Arm Assembly BAG 1 2 Socket Head Cap Screw, 1-1/4" 2 Socket Head Cap Screw, 1/2" 2 Button Head Cap Screw, 3/8" 6 Nuts 1 Gear Hub Spacer 1 Flat Building Plate 1 Single
Winter 2007/2008 Third Annual IEEE Lego Robot Competition Rules
 Welcome to the Third Annual IEEE Lego Robot Competition. In this document you will find the rules and regulations for the events for the Winter 2007/2008 competition. This competition will take place in
Welcome to the Third Annual IEEE Lego Robot Competition. In this document you will find the rules and regulations for the events for the Winter 2007/2008 competition. This competition will take place in
WCRG 2011 Sumo Robots Rev 0. Sumo Rules. (Mini & Full Size Sumo & LEGO)
") Object WCRG 2011 Sumo Robots Rev 0 Sumo Rules (Mini & Full Size Sumo & LEGO) The object is for your robot to push the other robot out of the sumo ring. Robot Specifications Robots must not intentionally
Object WCRG 2011 Sumo Robots Rev 0 Sumo Rules (Mini & Full Size Sumo & LEGO) The object is for your robot to push the other robot out of the sumo ring. Robot Specifications Robots must not intentionally
How Do You Make a Program Wait?
 How Do You Make a Program Wait? How Do You Make a Program Wait? Pre-Quiz 1. What is an algorithm? 2. Can you think of a reason why it might be inconvenient to program your robot to always go a precise
How Do You Make a Program Wait? How Do You Make a Program Wait? Pre-Quiz 1. What is an algorithm? 2. Can you think of a reason why it might be inconvenient to program your robot to always go a precise
Western Kansas Lego Robotics Competition April 16, 2018 Fort Hays State University
 Western Kansas Lego Robotics Competition April 16, 2018 Fort Hays State University WELCOME FHSU is hosting our 12 th annual Lego robotics competition. The competition is open to all area middle school
Western Kansas Lego Robotics Competition April 16, 2018 Fort Hays State University WELCOME FHSU is hosting our 12 th annual Lego robotics competition. The competition is open to all area middle school
Note to the Teacher. Description of the investigation. Time Required. Additional Materials VEX KITS AND PARTS NEEDED
 In this investigation students will identify a relationship between the size of the wheel and the distance traveled when the number of rotations of the motor axles remains constant. Students are required
In this investigation students will identify a relationship between the size of the wheel and the distance traveled when the number of rotations of the motor axles remains constant. Students are required
Efficiency. Efficiency is a measure of how much of the work put into a machine is changed into useful output work by the machine.
 Efficiency Efficiency is a measure of how much of the work put into a machine is changed into useful output work by the machine. A machine with high efficiency produces less heat from friction so more
Efficiency Efficiency is a measure of how much of the work put into a machine is changed into useful output work by the machine. A machine with high efficiency produces less heat from friction so more
Ev3 Robotics Programming 101
 Ev3 Robotics Programming 101 1. EV3 main components and use 2. Programming environment overview 3. Connecting your Robot wirelessly via bluetooth 4. Starting and understanding the EV3 programming environment
Ev3 Robotics Programming 101 1. EV3 main components and use 2. Programming environment overview 3. Connecting your Robot wirelessly via bluetooth 4. Starting and understanding the EV3 programming environment
FIRST Tech Challenge PushBot v4b Build Guide Horizontal Reach Robot
 2017-2018 FIRST Tech Challenge PushBot v4b Build Guide Horizontal Reach Robot 2 FIRST Tech Challenge PushBot v4a Build Guide Sponsor Thank You Thank you to our generous sponsors for your continued support
2017-2018 FIRST Tech Challenge PushBot v4b Build Guide Horizontal Reach Robot 2 FIRST Tech Challenge PushBot v4a Build Guide Sponsor Thank You Thank you to our generous sponsors for your continued support
In order to do this project you should review the following concepts:
 Catapult In order to do this project you should review the following concepts: Catapult 18 Rope Lego Band Rubber Band Catapult: Arm Catapult: Arm Catapult: Arm Leave the other end of the rubber band loose
Catapult In order to do this project you should review the following concepts: Catapult 18 Rope Lego Band Rubber Band Catapult: Arm Catapult: Arm Catapult: Arm Leave the other end of the rubber band loose
I.1 Smart Machines. Unit Overview:
 I Smart Machines I.1 Smart Machines Unit Overview: This unit introduces students to Sensors and Programming with VEX IQ. VEX IQ Sensors allow for autonomous and hybrid control of VEX IQ robots and other
I Smart Machines I.1 Smart Machines Unit Overview: This unit introduces students to Sensors and Programming with VEX IQ. VEX IQ Sensors allow for autonomous and hybrid control of VEX IQ robots and other
LEGO MINDSTORMS COMPETITIONS
 LEGO MINDSTORMS COMPETITIONS FIRST LEGO LEAGUE and WORLD ROBOT OLYMPIAD By Sanjay and Arvind Seshan, EV3Lessons.com With information and feedback from Dominic Bruneau (Canada), Nilesh Shah (India), Atul
LEGO MINDSTORMS COMPETITIONS FIRST LEGO LEAGUE and WORLD ROBOT OLYMPIAD By Sanjay and Arvind Seshan, EV3Lessons.com With information and feedback from Dominic Bruneau (Canada), Nilesh Shah (India), Atul
Installation Instructions for Lambo Door Mechanism. 1. Lift the hood and remove left and right shield of front wheel.
 Installation Instructions for Lambo Door Mechanism 1. Lift the hood and remove left and right shield of front wheel. 2. With the door open pull out the rubber hose connecting the door and the door frame,
Installation Instructions for Lambo Door Mechanism 1. Lift the hood and remove left and right shield of front wheel. 2. With the door open pull out the rubber hose connecting the door and the door frame,
PHILIPPINE ROBOTICS OLYMPIAD 2018 REGULAR CATEGORY RULES
 PHILIPPINE ROBOTICS OLYMPIAD NATIONAL SECRETARIAT OFFICE: FELTA Multi Media, Inc. FELTA Multi Media Center #18 Notre Dame St. Cubao, Quezon City Tel. Nos.: (632) 912-1397/438-3841 Fax Nos.: (632) 911-4103/912-7533
PHILIPPINE ROBOTICS OLYMPIAD NATIONAL SECRETARIAT OFFICE: FELTA Multi Media, Inc. FELTA Multi Media Center #18 Notre Dame St. Cubao, Quezon City Tel. Nos.: (632) 912-1397/438-3841 Fax Nos.: (632) 911-4103/912-7533
Robotics Contest Contact: Robin Schamber
 Robotics Contest Contact: Robin Schamber rschambe@uwyo.edu The Wyoming 4-H Robot Contest robotics contest is modeled after the National Robotics Challenge which began as the Society of Manufacturing Engineers
Robotics Contest Contact: Robin Schamber rschambe@uwyo.edu The Wyoming 4-H Robot Contest robotics contest is modeled after the National Robotics Challenge which began as the Society of Manufacturing Engineers
1-11. Mini Sumo Bot. Building Instructions. Fun Projects for your LEGO MINDSTORMS NXT! Home Projects Help Contacts. Building: Program:
 Fun Projects for your LEGO MINDSTORMS NXT! Home Projects Help Contacts Mini Sumo Bot Building: Program: Building Instructions 1-11 Start by building the Castor Bot. Click the picture for building instructions.
Fun Projects for your LEGO MINDSTORMS NXT! Home Projects Help Contacts Mini Sumo Bot Building: Program: Building Instructions 1-11 Start by building the Castor Bot. Click the picture for building instructions.
Worksheet Answer Key: Tree Measurer Projects > Tree Measurer
 Worksheet Answer Key: Tree Measurer Projects > Tree Measurer Maroon = exact answers Magenta = sample answers Construct: Test Questions: Caliper Reading Reading #1 Reading #2 1492 1236 1. Subtract to find
Worksheet Answer Key: Tree Measurer Projects > Tree Measurer Maroon = exact answers Magenta = sample answers Construct: Test Questions: Caliper Reading Reading #1 Reading #2 1492 1236 1. Subtract to find
CHEVY/GMC SuperRail Mounting Kit #3117
 CHEVY/GMC SuperRail Mounting Kit #3117 #3100 SuperGlide (12K) Gross Trailer Weight (Maximum) Vertical Load Weight (Max. Pin Weight) 12,000 lbs. 3,000 lbs. Installation Instructions SPECIFICATIONS Fits
CHEVY/GMC SuperRail Mounting Kit #3117 #3100 SuperGlide (12K) Gross Trailer Weight (Maximum) Vertical Load Weight (Max. Pin Weight) 12,000 lbs. 3,000 lbs. Installation Instructions SPECIFICATIONS Fits
Dual Fidgety Art Bot. We enjoyed building our Trashy Art Bot just as much as our Fidgety Art Bot.
 Dual Fidgety Art Bot Our instructions will take you through the step by step procedure to build a Dual Fidgety Art Bot, an Art Bot built with two fidget spinners stacked together. Since our investigation
Dual Fidgety Art Bot Our instructions will take you through the step by step procedure to build a Dual Fidgety Art Bot, an Art Bot built with two fidget spinners stacked together. Since our investigation
LE-9000 Trouble Shooting FAQ created 3/7/2006
 Problem 1.Size is not accurate 1.1 1.2 1.3 1.4 1.5 1.6 1.7 The circumference,that tracer measures, is not accurate. Size Adjustment is not proper. The diamond particles on the wheel are not in good condition.
Problem 1.Size is not accurate 1.1 1.2 1.3 1.4 1.5 1.6 1.7 The circumference,that tracer measures, is not accurate. Size Adjustment is not proper. The diamond particles on the wheel are not in good condition.
owners manual CAUTION: Read Rules for Safe Operation and Instructions Carefully Safety Assembly Operation Maintenance Parts
 owners manual Model No. 45-0350 (ATV) 45-0351 (FARM) (45-0350 SHOWN) TANDEM AXLE CART CAUTION: Read Rules for Safe Operation and Instructions Carefully IMPORTANT! The wheel bearings are not pre lubricated.
owners manual Model No. 45-0350 (ATV) 45-0351 (FARM) (45-0350 SHOWN) TANDEM AXLE CART CAUTION: Read Rules for Safe Operation and Instructions Carefully IMPORTANT! The wheel bearings are not pre lubricated.
After Performance Report Of the Robot
 After Performance Report Of the Robot Engineering 112 Spring 2007 Instructor: Dr. Ghada Salama By Mahmudul Alam Tareq Al Maaita Ismail El Ebiary Section- 502 Date: May 2, 2007 Introduction: The report
After Performance Report Of the Robot Engineering 112 Spring 2007 Instructor: Dr. Ghada Salama By Mahmudul Alam Tareq Al Maaita Ismail El Ebiary Section- 502 Date: May 2, 2007 Introduction: The report
Chapter 1. Robots and Programs
 Chapter 1 Robots and Programs 1 2 Chapter 1 Robots and Programs Introduction Without a program, a robot is just an assembly of electronic and mechanical components. This book shows you how to give it a
Chapter 1 Robots and Programs 1 2 Chapter 1 Robots and Programs Introduction Without a program, a robot is just an assembly of electronic and mechanical components. This book shows you how to give it a
understanding sensors
 The LEGO MINDSTORMS EV3 set includes three types of sensors: Touch, Color, and Infrared. You can use these sensors to make your robot respond to its environment. For example, you can program your robot
The LEGO MINDSTORMS EV3 set includes three types of sensors: Touch, Color, and Infrared. You can use these sensors to make your robot respond to its environment. For example, you can program your robot
Roborodentia Robot: Tektronix. Sean Yap Advisor: John Seng California Polytechnic State University, San Luis Obispo June 8th, 2016
 Roborodentia Robot: Tektronix Sean Yap Advisor: John Seng California Polytechnic State University, San Luis Obispo June 8th, 2016 Table of Contents Introduction... 2 Problem Statement... 2 Software...
Roborodentia Robot: Tektronix Sean Yap Advisor: John Seng California Polytechnic State University, San Luis Obispo June 8th, 2016 Table of Contents Introduction... 2 Problem Statement... 2 Software...
Robotics 2a. What Have We Got to Work With?
 Robotics 2a Introduction to the Lego Mindstorm EV3 What we re going to do in the session. Introduce you to the Lego Mindstorm Kits The Design Process Design Our Robot s Chassis What Have We Got to Work
Robotics 2a Introduction to the Lego Mindstorm EV3 What we re going to do in the session. Introduce you to the Lego Mindstorm Kits The Design Process Design Our Robot s Chassis What Have We Got to Work
Parts of a Lego RCX Robot
 Parts of a Lego RCX Robot RCX / Brain A B C The red button turns the RCX on and off. The green button starts and stops programs. The grey button switches between 5 programs, indicated as 1-5 on right side
Parts of a Lego RCX Robot RCX / Brain A B C The red button turns the RCX on and off. The green button starts and stops programs. The grey button switches between 5 programs, indicated as 1-5 on right side
COLLECT AND SORT FRUIT
 World Robot Olympiad 2018 WeDo Regular Category (Age up to 10 years) Game Description, Rules and Scoring FOOD MATTERS COLLECT AND SORT FRUIT Version: January 15 th Table of Contents 1. Game Description...
World Robot Olympiad 2018 WeDo Regular Category (Age up to 10 years) Game Description, Rules and Scoring FOOD MATTERS COLLECT AND SORT FRUIT Version: January 15 th Table of Contents 1. Game Description...
NXT Amazing Rules USU Physics Day Lagoon Farmington, UT
 NXT Amazing Rules USU Physics Day Lagoon Farmington, UT May 17, 2013 COMPETITION OBJECTIVE The aim of the competition is to foster math, science, engineering and team work in students in 5 th grade. DESIGN
NXT Amazing Rules USU Physics Day Lagoon Farmington, UT May 17, 2013 COMPETITION OBJECTIVE The aim of the competition is to foster math, science, engineering and team work in students in 5 th grade. DESIGN
Snow Problem Prototype Concepts for DESTINATION: DEEP SPACE
 ROBOT IN 3 DAYS: SNOW PROBLEM 1 Snow Problem Prototype Concepts for DESTINATION: DEEP SPACE Abraham Carter, Nick Riedel Abstract This white paper summarizes our prototypes for DESTINATION: DEEP SPACE,
ROBOT IN 3 DAYS: SNOW PROBLEM 1 Snow Problem Prototype Concepts for DESTINATION: DEEP SPACE Abraham Carter, Nick Riedel Abstract This white paper summarizes our prototypes for DESTINATION: DEEP SPACE,
Tri- State Consulting Co. Engineering 101 Project # 2 Catapult Design Group #
 Tri- State Consulting Co. Engineering 101 Project # 2 Catapult Design Group # 8 12-03-02 Executive Summary The objective of our second project was to design and construct a catapult, which met certain
Tri- State Consulting Co. Engineering 101 Project # 2 Catapult Design Group # 8 12-03-02 Executive Summary The objective of our second project was to design and construct a catapult, which met certain
UPDATED DOC Updates in Red 2018 Illinois 4-H Robotics Challenge: Envirobot
 2.22.18 UPDATED DOC Updates in Red 2018 Illinois 4-H Robotics Challenge: Envirobot If you want to learn about the health of a population, look at the air they breathe, the water they drink, and the places
2.22.18 UPDATED DOC Updates in Red 2018 Illinois 4-H Robotics Challenge: Envirobot If you want to learn about the health of a population, look at the air they breathe, the water they drink, and the places
Lumber Smith. Assembly Manual. If you are having problems assembling the saw and need assistance, please contact us at:
 Lumber Smith Assembly Manual If you are having problems assembling the saw and need assistance, please contact us at: 804-577-7398 info@lumbersmith.com 1 Step 1 Safety Carefully read the Owners Manual.
Lumber Smith Assembly Manual If you are having problems assembling the saw and need assistance, please contact us at: 804-577-7398 info@lumbersmith.com 1 Step 1 Safety Carefully read the Owners Manual.
Mindstorms NXT. mindstorms.lego.com
 Mindstorms NXT mindstorms.lego.com A3B99RO Robots: course organization At the beginning of the semester the students are divided into small teams (2 to 3 students). Each team uses the basic set of the
Mindstorms NXT mindstorms.lego.com A3B99RO Robots: course organization At the beginning of the semester the students are divided into small teams (2 to 3 students). Each team uses the basic set of the
Clayton Off Road COR COR COR
 Clayton Off Road COR-4806011 COR-4806021 COR-4806031 JEEP GRAND CHEROKEE WJ LONG ARM UPGRADE KITS (1999-2004 WJ) NOTES: This product requires general welding, fabrication and automotive mechanic skills.
Clayton Off Road COR-4806011 COR-4806021 COR-4806031 JEEP GRAND CHEROKEE WJ LONG ARM UPGRADE KITS (1999-2004 WJ) NOTES: This product requires general welding, fabrication and automotive mechanic skills.
Morse Code Autonomous Challenge. Overview. Challenge. Activity. Difficulty. Materials Needed. Class Time. Grade Level. Learning Focus.
 Overview Challenge Students will design, program, and build a robot that communicates with Morse code. The robot must use its communication system to tell the operator when the robot completes each task
Overview Challenge Students will design, program, and build a robot that communicates with Morse code. The robot must use its communication system to tell the operator when the robot completes each task
Nebraska 4-H Robotics and GPS/GIS and SPIRIT Robotics Projects
 Name: Club or School: Robots Knowledge Survey (Pre) Multiple Choice: For each of the following questions, circle the letter of the answer that best answers the question. 1. A robot must be in order to
Name: Club or School: Robots Knowledge Survey (Pre) Multiple Choice: For each of the following questions, circle the letter of the answer that best answers the question. 1. A robot must be in order to
18600 Angular Momentum
 18600 Angular Momentum Experiment 1 - Collisions Involving Rotation Setup: Place the kit contents on a laboratory bench or table. Refer to Figure 1, Section A. Tip the angular momentum apparatus base on
18600 Angular Momentum Experiment 1 - Collisions Involving Rotation Setup: Place the kit contents on a laboratory bench or table. Refer to Figure 1, Section A. Tip the angular momentum apparatus base on
CHEVY/GMC SuperRail Mounting Kit #4423
 CHEVY/GMC SuperRail Mounting Kit #4423 #4100 SuperGlide (16K) #4400 SuperGlide (20K) Gross Trailer Weight (Maximum) Vertical Load Weight (Max. Pin Weight) 16,000 lbs. 4,000 lbs. Gross Trailer Weight (Maximum)
CHEVY/GMC SuperRail Mounting Kit #4423 #4100 SuperGlide (16K) #4400 SuperGlide (20K) Gross Trailer Weight (Maximum) Vertical Load Weight (Max. Pin Weight) 16,000 lbs. 4,000 lbs. Gross Trailer Weight (Maximum)
Students will design, program, and build a robot vehicle to traverse a maze in 30 seconds without touching any sidewalls or going out of bounds.
 Overview Challenge Students will design, program, and build a robot vehicle to traverse a maze in 30 seconds without touching any sidewalls or going out of bounds. Materials Needed One of these sets: TETRIX
Overview Challenge Students will design, program, and build a robot vehicle to traverse a maze in 30 seconds without touching any sidewalls or going out of bounds. Materials Needed One of these sets: TETRIX
MATERIALS PROVIDED BY SCIENCE & TECH FAIR STAFF AT EVENT:
 PURPOSE: The purpose of the Robotics competition is: 1) Design and create a robot, within the constraints listed below, which competes and wins the Robot competition described in the rules below. 2) The
PURPOSE: The purpose of the Robotics competition is: 1) Design and create a robot, within the constraints listed below, which competes and wins the Robot competition described in the rules below. 2) The
BROWNCOATS Team 7842 Engineering Notebook - Rover Ruckus
 Date Location Start Time End Time Week # September 14, 2018 AvaLAN Wireless 2:00 p.m. 6:00 p.m. 2 Meeting Goals: Discuss Brainstorming Ideas, Continue assembly of drive train Team Members in Attendance:
Date Location Start Time End Time Week # September 14, 2018 AvaLAN Wireless 2:00 p.m. 6:00 p.m. 2 Meeting Goals: Discuss Brainstorming Ideas, Continue assembly of drive train Team Members in Attendance:
DP-19 DUAL PURPOSE DETECTOR INSTRUCTION MANUAL
 DP-19 DUAL PURPOSE DETECTOR INSTRUCTION MANUAL Case Size: 5.3 h X 3.3 w x 1.5 d@ Weight: 8 oz. ABOUT THE DP-19 Battery: 9 volt transistor type Eveready 216 or equal Current: 17 milliamps Frequency Response:
DP-19 DUAL PURPOSE DETECTOR INSTRUCTION MANUAL Case Size: 5.3 h X 3.3 w x 1.5 d@ Weight: 8 oz. ABOUT THE DP-19 Battery: 9 volt transistor type Eveready 216 or equal Current: 17 milliamps Frequency Response:
LEGO 2D Planar Manipulator (with zero offset between Z1 and Z2 axes of rotation)
") LEGO 2D Planar Manipulator (with zero offset between Z1 and Z2 axes of rotation) Uses some parts not found in NXT Mindstorms Kit 9797 e.g. 2 nd Turntable, 1x12 plates, and 15100: Pin-hole Friction Peg.
LEGO 2D Planar Manipulator (with zero offset between Z1 and Z2 axes of rotation) Uses some parts not found in NXT Mindstorms Kit 9797 e.g. 2 nd Turntable, 1x12 plates, and 15100: Pin-hole Friction Peg.
INSPECTION AND CORRECTION OF BELLHOUSING TO CRANKSHAFT ALIGNMENT
 INSPECTION AND CORRECTION OF BELLHOUSING TO CRANKSHAFT ALIGNMENT BACKGROUND Proper alignment of the transmission input shaft to the crankshaft centerline is required in order to achieve the best results
INSPECTION AND CORRECTION OF BELLHOUSING TO CRANKSHAFT ALIGNMENT BACKGROUND Proper alignment of the transmission input shaft to the crankshaft centerline is required in order to achieve the best results
Robot Class. Are all robots created equal?
 Robot Class Are all robots created equal? Robot Class Points to Remember: We add classes as we see new types of robots! None of the Classifications are any better (or worse) than any other. Robots can
Robot Class Are all robots created equal? Robot Class Points to Remember: We add classes as we see new types of robots! None of the Classifications are any better (or worse) than any other. Robots can
Laboratory 7: CONTROL SYSTEMS FUNDAMENTALS
 Laboratory 7: CONTROL SYSTEMS FUNDAMENTALS OBJECTIVES - Familiarize the students in the area of automatization and control. - Familiarize the student with programming of toy robots. EQUIPMENT AND REQUERIED
Laboratory 7: CONTROL SYSTEMS FUNDAMENTALS OBJECTIVES - Familiarize the students in the area of automatization and control. - Familiarize the student with programming of toy robots. EQUIPMENT AND REQUERIED
The Wheels Module The Seats Module Integrate the seats and Wheels modules Ferris Wheel base Build the Gear System...
 Alternate Motorization Kit The Wheels Module... 2 The Seats Module... 3 Integrate the seats and Wheels modules... 4 Ferris Wheel base... 5 Build the Gear System... 7 Ferris Wheel Final Integration!!!...
Alternate Motorization Kit The Wheels Module... 2 The Seats Module... 3 Integrate the seats and Wheels modules... 4 Ferris Wheel base... 5 Build the Gear System... 7 Ferris Wheel Final Integration!!!...
Engage Examine the picture on the left. 1. What s happening? What is this picture about?
 AP Physics Lesson 1.a Kinematics Graphical Analysis Outcomes Interpret graphical evidence of motion (uniform speed & uniform acceleration). Apply an understanding of position time graphs to novel examples.
AP Physics Lesson 1.a Kinematics Graphical Analysis Outcomes Interpret graphical evidence of motion (uniform speed & uniform acceleration). Apply an understanding of position time graphs to novel examples.
KING OF THE HILL CHALLENGE RULES
 KING OF THE HILL CHALLENGE RULES Last Revised: May 19 th, 2015 Table of Contents 1.0 KING of the HILL CHALLENGE... 2 2.0 CHALLENGE RULES... 2 3.0 JUDGING and SCORING... 3 4.0 KING of the HILL DIAGRAM...
KING OF THE HILL CHALLENGE RULES Last Revised: May 19 th, 2015 Table of Contents 1.0 KING of the HILL CHALLENGE... 2 2.0 CHALLENGE RULES... 2 3.0 JUDGING and SCORING... 3 4.0 KING of the HILL DIAGRAM...
Chapter 14. using data wires
 Chapter 14. using data wires In this fifth part of the book, you ll learn how to use data wires (this chapter), Data Operations blocks (Chapter 15), and variables (Chapter 16) to create more advanced programs
Chapter 14. using data wires In this fifth part of the book, you ll learn how to use data wires (this chapter), Data Operations blocks (Chapter 15), and variables (Chapter 16) to create more advanced programs