Multi-Vehicles Formation Control Exploring a Scalar Field
|
|
|
- Shannon Moris Harvey
- 5 years ago
- Views:
Transcription
1 Multi-Vehicles Formation Control Exploring a Scalar Field Polytechnic University Department of Mechanical, Aerospace, and Manufacturing Engineering Polytechnic University,6 Metrotech,, Brooklyn, NY Mechatronics Professor Vikram Kapila Group # 9 Francesca Fiorilli <francescafiorilli2@gmail.com> Saran Kakarlapudi <saran.astronaut@gmail.com> Danny Tan <dnnytan3@yahoo.com>
2 Overview Objective Specifications Functionality and Algorithm Hardware Circuit Diagram Photos of Product PBasic Code Prototype Cost Analysis Product Limitations Conclusion and Improvements Acknowledgements
3 Objective Exploring a Scalar Field using Multiple Mobile Agents both In and Out of Formation Light 3 Mobile Agents Equilateral Triangle Formation
4 Specifications (aimed at) Controlled by Basic Stamp 2 microcontroller (succeeded) Safety features Instantaneous shutdown safety switch (did not use) Hard/Software features to prevent damage to the BS2 and other components (partially used) User Interface/Control (partially used) On/Off RF controller Analog Sensor (succeeded) Photo - resistor Digital Sensor (succeeded) RF transceiver Actuators (succeeded) Full rotation servo motors (6)
5 Multi-Vehicle Formation Control System of controls for multi-vehicles driven in formation Each capable of exploring a scalar field Light Intensity field (our choice) Basic Stamp powered computing Use RF transceivers to communicate Battery powered system 9V batteries
6 Functionality and Algorithm CASE 1: Stand Alone Operation Master is Manually Driven Followers Receive command from Master Maintenance of Formation Triggering Signal for Breaking of Formation Vehicle stops at a Safe Distance from Light Source If Job finished, then it communicates with the other vehicles and if necessary repeats the above algorithm
7 Functionality and Algorithm 2 CASE 2: Formation Operation When Triggered, Master senses the Scalar Field (Light Intensity) and comes up with the Trajectory Master Guides the Followers through RF transceivers Stoppage at Safe Distance from Light Source Once Job is finished, the above algorithm is repeated

")
")
8 Boe-Bot Bot Robot Kit Hardware Basic Stamp 2 (1) Board of Education (1) Robot chassis (1) Servos (2) Resistors (2, 1, 1)

9 Hardware 2 912MHz RF transceiver (1) 800 ft range 9600 baud serial 16-bit CRC Error Checking FIFO Buffer +3V to +5V Operation Built-In Antenna Photoresistor (1)

10 IR Sensor (Used only on the Master) Hardware 3 IR Remote * figures are not to
11 Circuit Diagram The Picture beside is a Simple Circuit Diagram for the Usage of RC time command. This is Used indirectly to obtain determine the Relative Intensity of Light
12 Circuit for the IR Receiver Circuit Diagram 2 Reading at PIN 9 depends on the key which is pressed on the IR Remote (our TV remote)
13 IR Waves
14 RF Transceiver

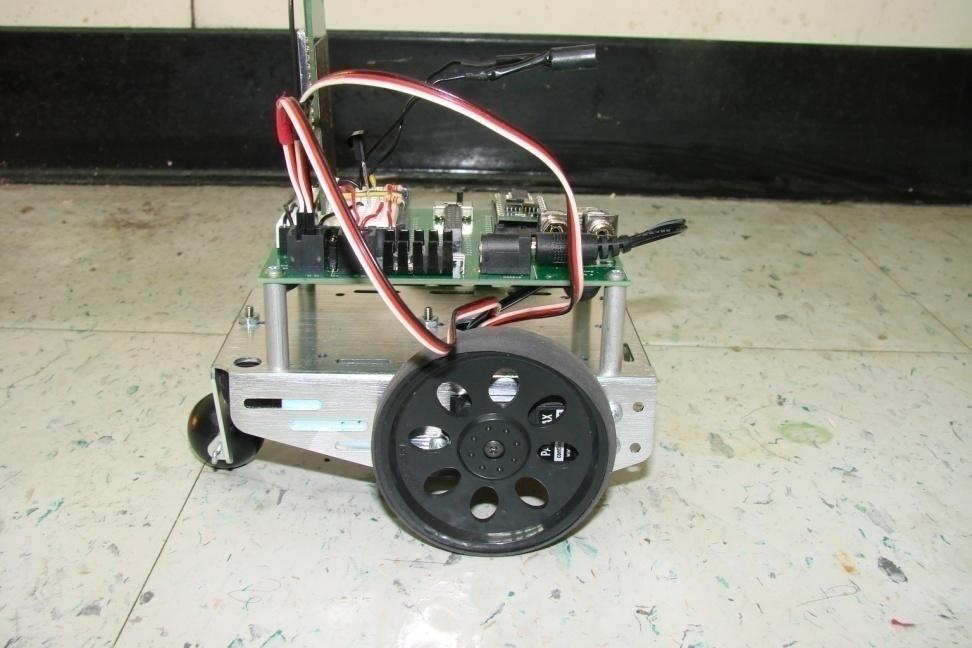
15 Photos of Product

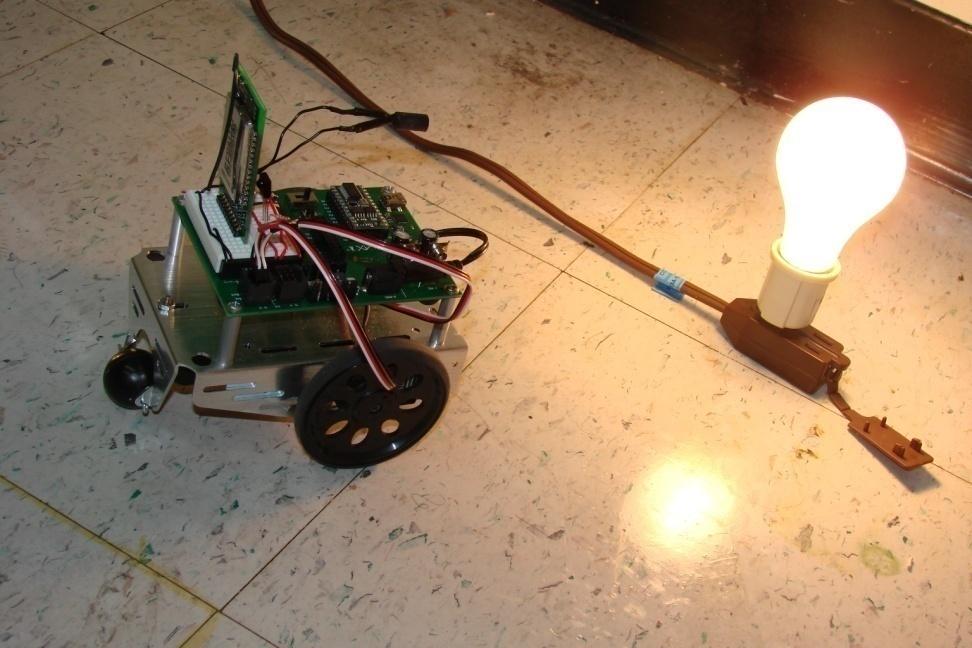
16 Photos of the Product 2
17 PBasic Code
18 Prototype Cost Analysis Parts Name Unit Cost Quantity Sum Total Boe-Bot Robot Kit (Servos, Microcontroller, sensors included) $ $ MHz RF Transceivers $ $ Function Universal Remote $ $ Miscellaneous (shipping, taxes, etc.) $ Total Prototype Cost: $ Prototype Unit Cost = $ Mass Production Unit Cost = $ $120.22
19 Applications Semi Autonomous Fire Fighting System Semi Autonomous Radiation and/or Gas leak detection system Remote mapping of any Scalar Field
20 Product Limitations Open Loop Control Velocity of the vehicles is not monitored, trouble with variable terrain No distance measurement between the vehicles, chance of formation degradation Once disturbed, the initial formation cannot be reformed Unable to Avoid Obstacle Lack of obstacle avoidance algorithm Greatly increase complexity to avoid obstacles and keep formation
21 Conclusion and Improvements Conclusions Coarsely Stable System is Delicate Sensitive to Terrain
22 Conclusion and Improvements Improvements Closed Loop System for Velocity and Distance Active search to relocate and reform in group formation Add other sensors to increase application use Multiple formation selections
23 Acknowledgements Mechatronics Lab: For lending extra Boe - Bots for use Groups that helped with tools and materials Group 3: Vito Guardi & Joseph Ferrari Providing extra Basic Stamps 2 Graphics: Parallax Incorporated (
24 Questions?
Multi-vehicles formation control exploring a scalar field
 1 Multi-vehicles formation control exploring a scalar field Francesca Fiorilli, Saran Kakarlapudi, Danny Tan Abstract We present a multi-vehicles system capable to climb a scalar field. The vehicle are
1 Multi-vehicles formation control exploring a scalar field Francesca Fiorilli, Saran Kakarlapudi, Danny Tan Abstract We present a multi-vehicles system capable to climb a scalar field. The vehicle are
Advanced Mechatronics 1 st Mini Project. Remote Control Car. Jose Antonio De Gracia Gómez, Amartya Barua March, 25 th 2014
 Advanced Mechatronics 1 st Mini Project Remote Control Car Jose Antonio De Gracia Gómez, Amartya Barua March, 25 th 2014 Remote Control Car Manual Control with the remote and direction buttons Automatic
Advanced Mechatronics 1 st Mini Project Remote Control Car Jose Antonio De Gracia Gómez, Amartya Barua March, 25 th 2014 Remote Control Car Manual Control with the remote and direction buttons Automatic
Mechatronics Project Presentation
 Mechatronics Project Presentation An Inexpensive Electronic Method for Measuring Takeoff Distances BY: KARL ABDELNOUR ROBERT ECKHARDT SAUMIL PARIKH 1 OUTLINE OF PRESENTATION INTRODUCTION HARDWARE EXPERIMENTAL
Mechatronics Project Presentation An Inexpensive Electronic Method for Measuring Takeoff Distances BY: KARL ABDELNOUR ROBERT ECKHARDT SAUMIL PARIKH 1 OUTLINE OF PRESENTATION INTRODUCTION HARDWARE EXPERIMENTAL
Matlab Data Acquisition and Control Toolbox for Basic Stamp Microcontrollers
 Proceedings of the 45th IEEE Conference on Decision & Control Manchester Grand Hyatt Hotel San Diego, CA, USA, December 13-15, 2006 Matlab Data Acquisition and Control Toolbox for Basic Stamp Microcontrollers
Proceedings of the 45th IEEE Conference on Decision & Control Manchester Grand Hyatt Hotel San Diego, CA, USA, December 13-15, 2006 Matlab Data Acquisition and Control Toolbox for Basic Stamp Microcontrollers
EEL5666C IMDL Spring 2006 Student: Andrew Joseph. *Alarm-o-bot*
 EEL5666C IMDL Spring 2006 Student: Andrew Joseph *Alarm-o-bot* TAs: Adam Barnett, Sara Keen Instructor: A.A. Arroyo Final Report April 25, 2006 Table of Contents Abstract 3 Executive Summary 3 Introduction
EEL5666C IMDL Spring 2006 Student: Andrew Joseph *Alarm-o-bot* TAs: Adam Barnett, Sara Keen Instructor: A.A. Arroyo Final Report April 25, 2006 Table of Contents Abstract 3 Executive Summary 3 Introduction
Polytechnic University Professor Vikram Kapila SMART Program Summer 2005 FINDING THE CRITICAL ANGLE OF A PRISM. Team 5 Report:
 Polytechnic University Professor Vikram Kapila SMART Program Summer 2005 FINDING THE CRITICAL ANGLE OF A PRISM Report: Mustafa Kilic Math Teacher Brooklyn Amity School Thomas Byrne Physics Teacher New
Polytechnic University Professor Vikram Kapila SMART Program Summer 2005 FINDING THE CRITICAL ANGLE OF A PRISM Report: Mustafa Kilic Math Teacher Brooklyn Amity School Thomas Byrne Physics Teacher New
EEL5666 Intelligent Machines Design Lab. Project Report
 EEL5666 Intelligent Machines Design Lab Project Report Instructor Dr. Arroyo & Dr. Schwartz TAs Adam & Sara 04/25/2006 Sharan Asundi Graduate Student Department of Mechanical and Aerospace Engineering
EEL5666 Intelligent Machines Design Lab Project Report Instructor Dr. Arroyo & Dr. Schwartz TAs Adam & Sara 04/25/2006 Sharan Asundi Graduate Student Department of Mechanical and Aerospace Engineering
A Mechatronics-aided Light Reflection Experiment for Pre-College Students
 Principal Investigator/Project Director: Dr. Vikram Kapila Institution: Polytechnic University Award Number: 0227479 Program: EEC Project Title: Research Experience for Teachers Site in Mechatronics A
Principal Investigator/Project Director: Dr. Vikram Kapila Institution: Polytechnic University Award Number: 0227479 Program: EEC Project Title: Research Experience for Teachers Site in Mechatronics A
Development of a MATLAB Data Acquisition and Control Toolbox for BASIC Stamp Microcontrollers
 Chapter 4 Development of a MATLAB Data Acquisition and Control Toolbox for BASIC Stamp Microcontrollers 4.1. Introduction Data acquisition and control boards, also known as DAC boards, are used in virtually
Chapter 4 Development of a MATLAB Data Acquisition and Control Toolbox for BASIC Stamp Microcontrollers 4.1. Introduction Data acquisition and control boards, also known as DAC boards, are used in virtually
Autonomous Refrigerator. Vinícius Bazan Adam Jerozolim Luiz Jollembeck
 Autonomous Refrigerator Vinícius Bazan Adam Jerozolim Luiz Jollembeck Introduction Components Circuits Coding Marketing Conclusion Introduction Uses Specimen and Culture Refrigerators can be found in many
Autonomous Refrigerator Vinícius Bazan Adam Jerozolim Luiz Jollembeck Introduction Components Circuits Coding Marketing Conclusion Introduction Uses Specimen and Culture Refrigerators can be found in many
THE NAVIGATION CONTROL OF A ROBOTIC STRUCTURE
 THE NAVIGATION CONTROL OF A ROBOTIC STRUCTURE Laurean BOGDAN 1, Gheorghe DANCIU 2, Flaviu STANCIULEA 3 1 University LUCIAN BLAGA of Sibiu, 2 Tera Impex SRL, 3 Tera Impex SRL e-mail: laurean.bogdan@ulbsibiu.ro,
THE NAVIGATION CONTROL OF A ROBOTIC STRUCTURE Laurean BOGDAN 1, Gheorghe DANCIU 2, Flaviu STANCIULEA 3 1 University LUCIAN BLAGA of Sibiu, 2 Tera Impex SRL, 3 Tera Impex SRL e-mail: laurean.bogdan@ulbsibiu.ro,
CEEN Bot Lab Design A SENIOR THESIS PROPOSAL
 CEEN Bot Lab Design by Deborah Duran (EENG) Kenneth Townsend (EENG) A SENIOR THESIS PROPOSAL Presented to the Faculty of The Computer and Electronics Engineering Department In Partial Fulfillment of Requirements
CEEN Bot Lab Design by Deborah Duran (EENG) Kenneth Townsend (EENG) A SENIOR THESIS PROPOSAL Presented to the Faculty of The Computer and Electronics Engineering Department In Partial Fulfillment of Requirements
Feed-back loop. open-loop. closed-loop
 Servos AJLONTECH Overview Servo motors are used for angular positioning, such as in radio control airplanes. They typically have a movement range of 180 deg but can go up to 210 deg. The output shaft of
Servos AJLONTECH Overview Servo motors are used for angular positioning, such as in radio control airplanes. They typically have a movement range of 180 deg but can go up to 210 deg. The output shaft of
Embedded Systems & Robotics (Winter Training Program) 6 Weeks/45 Days
 6 Weeks/45 Days") Embedded Systems & Robotics (Winter Training Program) 6 Weeks/45 Days PRESENTED BY RoboSpecies Technologies Pvt. Ltd. Office: W-53G, Sector-11, Noida-201301, U.P. Contact us: Email: stp@robospecies.com
Embedded Systems & Robotics (Winter Training Program) 6 Weeks/45 Days PRESENTED BY RoboSpecies Technologies Pvt. Ltd. Office: W-53G, Sector-11, Noida-201301, U.P. Contact us: Email: stp@robospecies.com
Wireless Technology in Robotics
 Wireless Technology in Robotics Purpose: The objective of this activity is to introduce students to the use of wireless technology to control robots. Overview: Robots can be found in most industries. Robots
Wireless Technology in Robotics Purpose: The objective of this activity is to introduce students to the use of wireless technology to control robots. Overview: Robots can be found in most industries. Robots
Introducing the Quadrotor Flying Robot
 Introducing the Quadrotor Flying Robot Roy Brewer Organizer Philadelphia Robotics Meetup Group August 13, 2009 What is a Quadrotor? A vehicle having 4 rotors (propellers) at each end of a square cross
Introducing the Quadrotor Flying Robot Roy Brewer Organizer Philadelphia Robotics Meetup Group August 13, 2009 What is a Quadrotor? A vehicle having 4 rotors (propellers) at each end of a square cross
Park Ranger. Li Yang April 21, 2014
 Park Ranger Li Yang April 21, 2014 University of Florida Department of Electrical and Computer Engineering EEL 5666C IMDL Written Report Instructors: A. Antonio Arroyo, Eric M. Schwartz TAs: Andy Gray,
Park Ranger Li Yang April 21, 2014 University of Florida Department of Electrical and Computer Engineering EEL 5666C IMDL Written Report Instructors: A. Antonio Arroyo, Eric M. Schwartz TAs: Andy Gray,
BIDIRECTIONAL ROTATION OF AN INDUCTION MOTOR WITH A REMOTE CONTROL DEVICE
 BIDIRECTIONAL ROTATION OF AN INDUCTION MOTOR WITH A REMOTE CONTROL DEVICE ABSTRACT The project is designed to drive an induction motor for the required application in forward and reverse directions using
BIDIRECTIONAL ROTATION OF AN INDUCTION MOTOR WITH A REMOTE CONTROL DEVICE ABSTRACT The project is designed to drive an induction motor for the required application in forward and reverse directions using
Internet of Things Student STEM Project Jackson High School. Lesson 3: Arduino Solar Tracker
 Internet of Things Student STEM Project Jackson High School Lesson 3: Arduino Solar Tracker Lesson 3 Arduino Solar Tracker Time to complete Lesson 60-minute class period Learning objectives Students learn
Internet of Things Student STEM Project Jackson High School Lesson 3: Arduino Solar Tracker Lesson 3 Arduino Solar Tracker Time to complete Lesson 60-minute class period Learning objectives Students learn
Wheeled Mobile Robot Obstacle Avoidance Using Compass and Ultrasonic
 Universal Journal of Control and Automation 6(1): 13-18, 2018 DOI: 10.13189/ujca.2018.060102 http://www.hrpub.org Wheeled Mobile Robot Obstacle Avoidance Using Compass and Ultrasonic Yousef Moh. Abueejela
Universal Journal of Control and Automation 6(1): 13-18, 2018 DOI: 10.13189/ujca.2018.060102 http://www.hrpub.org Wheeled Mobile Robot Obstacle Avoidance Using Compass and Ultrasonic Yousef Moh. Abueejela
ARRL Teachers Institute Introduction to Wireless Technology 8:00am - 4:00pm Daily
 ARRL Teachers Institute Introduction to Wireless Technology 8:00am - 4:00pm Daily Note: this is a tentative agenda and may be changed to accommodate optional activities and to best meet site and TI participants
ARRL Teachers Institute Introduction to Wireless Technology 8:00am - 4:00pm Daily Note: this is a tentative agenda and may be changed to accommodate optional activities and to best meet site and TI participants
Parallax MHz RF Transmitter (#27980) Parallax MHz RF Receiver (#27981)
 Parallax MHz RF Receiver (#27981)") Web Site: www.parallax.com Forums: forums.parallax.com Sales: sales@parallax.com Technical: support@parallax.com Office: (916) 624-8333 Fax: (916) 624-8003 Sales: (888) 512-1024 Tech Support: (888) 997-8267
Web Site: www.parallax.com Forums: forums.parallax.com Sales: sales@parallax.com Technical: support@parallax.com Office: (916) 624-8333 Fax: (916) 624-8003 Sales: (888) 512-1024 Tech Support: (888) 997-8267
Training Schedule. Robotic System Design using Arduino Platform
 Training Schedule Robotic System Design using Arduino Platform Session - 1 Embedded System Design Basics : Scope : To introduce Embedded Systems hardware design fundamentals to students. Processor Selection
Training Schedule Robotic System Design using Arduino Platform Session - 1 Embedded System Design Basics : Scope : To introduce Embedded Systems hardware design fundamentals to students. Processor Selection
Devastator Tank Mobile Platform with Edison SKU:ROB0125
 Devastator Tank Mobile Platform with Edison SKU:ROB0125 From Robot Wiki Contents 1 Introduction 2 Tutorial 2.1 Chapter 2: Run! Devastator! 2.2 Chapter 3: Expansion Modules 2.3 Chapter 4: Build The Devastator
Devastator Tank Mobile Platform with Edison SKU:ROB0125 From Robot Wiki Contents 1 Introduction 2 Tutorial 2.1 Chapter 2: Run! Devastator! 2.2 Chapter 3: Expansion Modules 2.3 Chapter 4: Build The Devastator
Robotics & Embedded Systems (Summer Training Program) 4 Weeks/30 Days
 4 Weeks/30 Days") (Summer Training Program) 4 Weeks/30 Days PRESENTED BY RoboSpecies Technologies Pvt. Ltd. Office: D-66, First Floor, Sector- 07, Noida, UP Contact us: Email: stp@robospecies.com Website: www.robospecies.com
(Summer Training Program) 4 Weeks/30 Days PRESENTED BY RoboSpecies Technologies Pvt. Ltd. Office: D-66, First Floor, Sector- 07, Noida, UP Contact us: Email: stp@robospecies.com Website: www.robospecies.com
VOICE CONTROLLED ROBOT WITH REAL TIME BARRIER DETECTION AND AVERTING
 VOICE CONTROLLED ROBOT WITH REAL TIME BARRIER DETECTION AND AVERTING P.NARENDRA ILAYA PALLAVAN 1, S.HARISH 2, C.DHACHINAMOORTHI 3 1Assistant Professor, EIE Department, Bannari Amman Institute of Technology,
VOICE CONTROLLED ROBOT WITH REAL TIME BARRIER DETECTION AND AVERTING P.NARENDRA ILAYA PALLAVAN 1, S.HARISH 2, C.DHACHINAMOORTHI 3 1Assistant Professor, EIE Department, Bannari Amman Institute of Technology,
HB-25 Motor Controller (#29144)
") Web Site: www.parallax.com Forums: forums.parallax.com Sales: sales@parallax.com Technical: support@parallax.com Office: (916) 624-8333 Fax: (916) 624-8003 Sales: (888) 512-1024 Tech Support: (888) 997-8267
Web Site: www.parallax.com Forums: forums.parallax.com Sales: sales@parallax.com Technical: support@parallax.com Office: (916) 624-8333 Fax: (916) 624-8003 Sales: (888) 512-1024 Tech Support: (888) 997-8267
PCB & Circuit Designing (Summer Training Program) 6 Weeks/ 45 Days PRESENTED BY
 6 Weeks/ 45 Days PRESENTED BY") PCB & Circuit Designing (Summer Training Program) 6 Weeks/ 45 Days PRESENTED BY RoboSpecies Technologies Pvt. Ltd. Office: D-66, First Floor, Sector- 07, Noida, UP Contact us: Email: stp@robospecies.com
PCB & Circuit Designing (Summer Training Program) 6 Weeks/ 45 Days PRESENTED BY RoboSpecies Technologies Pvt. Ltd. Office: D-66, First Floor, Sector- 07, Noida, UP Contact us: Email: stp@robospecies.com
Mechatronics Project Report
 Mechatronics Project Report Introduction Robotic fish are utilized in the Dynamic Systems Laboratory in order to study and model schooling in fish populations, with the goal of being able to manage aquatic
Mechatronics Project Report Introduction Robotic fish are utilized in the Dynamic Systems Laboratory in order to study and model schooling in fish populations, with the goal of being able to manage aquatic
UTILIZATION OF ROBOTICS AS CONTEMPORARY TECHNOLOGY AND AN EFFECTIVE TOOL IN TEACHING COMPUTER PROGRAMMING
 UTILIZATION OF ROBOTICS AS CONTEMPORARY TECHNOLOGY AND AN EFFECTIVE TOOL IN TEACHING COMPUTER PROGRAMMING Aaron R. Rababaah* 1, Ahmad A. Rabaa i 2 1 arababaah@auk.edu.kw 2 arabaai@auk.edu.kw Abstract Traditional
UTILIZATION OF ROBOTICS AS CONTEMPORARY TECHNOLOGY AND AN EFFECTIVE TOOL IN TEACHING COMPUTER PROGRAMMING Aaron R. Rababaah* 1, Ahmad A. Rabaa i 2 1 arababaah@auk.edu.kw 2 arabaai@auk.edu.kw Abstract Traditional
SMART Funded by The National Science Foundation
 Lecture 5 Capacitors 1 Store electric charge Consists of two plates of a conducting material separated by a space filled by an insulator Measured in units called farads, F Capacitors 2 Mylar Ceramic Electrolytic
Lecture 5 Capacitors 1 Store electric charge Consists of two plates of a conducting material separated by a space filled by an insulator Measured in units called farads, F Capacitors 2 Mylar Ceramic Electrolytic
Simulation Of Radar With Ultrasonic Sensors
 Simulation Of Radar With Ultrasonic Sensors Mr.R.S.AGARWAL Associate Professor Dept. Of Electronics & Ms.V.THIRUMALA Btech Final Year Student Dept. Of Electronics & Mr.D.VINOD KUMAR B.Tech Final Year Student
Simulation Of Radar With Ultrasonic Sensors Mr.R.S.AGARWAL Associate Professor Dept. Of Electronics & Ms.V.THIRUMALA Btech Final Year Student Dept. Of Electronics & Mr.D.VINOD KUMAR B.Tech Final Year Student
ICTCM 28th International Conference on Technology in Collegiate Mathematics
 ARDUINO IN THE CLASSROOM: CLASSROOM READY MODULES FOR UNDERGRADUATE MATHEMATICS Michael D. Seminelli 1 Department of Mathematical Sciences United States Military Academy West Point, NY 10996 Michael.Seminelli@usma.edu
ARDUINO IN THE CLASSROOM: CLASSROOM READY MODULES FOR UNDERGRADUATE MATHEMATICS Michael D. Seminelli 1 Department of Mathematical Sciences United States Military Academy West Point, NY 10996 Michael.Seminelli@usma.edu
An Autonomous Self- Propelled Robot Designed for Obstacle Avoidance and Fire Fighting
 An Autonomous Self- Propelled Robot Designed for Obstacle Avoidance and Fire Fighting K. Prathyusha Assistant professor, Department of ECE, NRI Institute of Technology, Agiripalli Mandal, Krishna District,
An Autonomous Self- Propelled Robot Designed for Obstacle Avoidance and Fire Fighting K. Prathyusha Assistant professor, Department of ECE, NRI Institute of Technology, Agiripalli Mandal, Krishna District,
In this activity, you will program the BASIC Stamp to control the rotation of each of the Parallax pre-modified servos on the Boe-Bot.
 Week 3 - How servos work Testing the Servos Individually In this activity, you will program the BASIC Stamp to control the rotation of each of the Parallax pre-modified servos on the Boe-Bot. How Servos
Week 3 - How servos work Testing the Servos Individually In this activity, you will program the BASIC Stamp to control the rotation of each of the Parallax pre-modified servos on the Boe-Bot. How Servos
SELF-BALANCING MOBILE ROBOT TILTER
 Tomislav Tomašić Andrea Demetlika Prof. dr. sc. Mladen Crneković ISSN xxx-xxxx SELF-BALANCING MOBILE ROBOT TILTER Summary UDC 007.52, 62-523.8 In this project a remote controlled self-balancing mobile
Tomislav Tomašić Andrea Demetlika Prof. dr. sc. Mladen Crneković ISSN xxx-xxxx SELF-BALANCING MOBILE ROBOT TILTER Summary UDC 007.52, 62-523.8 In this project a remote controlled self-balancing mobile
TOSHIBA MACHINE CO., LTD.
 User s Manual Product SHAN5 Version 1.12 (V Series Servo Amplifier PC Tool) Model SFV02 July2005 TOSHIBA MACHINE CO., LTD. Introduction This document describes the operation and installation methods of
User s Manual Product SHAN5 Version 1.12 (V Series Servo Amplifier PC Tool) Model SFV02 July2005 TOSHIBA MACHINE CO., LTD. Introduction This document describes the operation and installation methods of
Compass Module AppMod (#29113) Electro-Mechanical Compass
 Electro-Mechanical Compass") 599 Menlo Drive, Suite 100 Rocklin, California 95765, USA Office: (916) 624-8333 Fax: (916) 624-8003 General: info@parallax.com Technical: support@parallax.com Web Site: www.parallax.com Educational: www.parallax.com/sic
599 Menlo Drive, Suite 100 Rocklin, California 95765, USA Office: (916) 624-8333 Fax: (916) 624-8003 General: info@parallax.com Technical: support@parallax.com Web Site: www.parallax.com Educational: www.parallax.com/sic
Project Proposal. Underwater Fish 02/16/2007 Nathan Smith,
 Project Proposal Underwater Fish 02/16/2007 Nathan Smith, rahteski@gwu.edu Abstract The purpose of this project is to build a mechanical, underwater fish that can be controlled by a joystick. The fish
Project Proposal Underwater Fish 02/16/2007 Nathan Smith, rahteski@gwu.edu Abstract The purpose of this project is to build a mechanical, underwater fish that can be controlled by a joystick. The fish
Infrared Remote AppKit (#29122)
") Web Site: www.parallax.com Forums: forums.parallax.com Sales: sales@parallax.com Technical: support@parallax.com Office: (916) 624-8333 Fax: (916) 624-8003 Sales: (888) 512-1024 Tech Support: (888) 997-8267
Web Site: www.parallax.com Forums: forums.parallax.com Sales: sales@parallax.com Technical: support@parallax.com Office: (916) 624-8333 Fax: (916) 624-8003 Sales: (888) 512-1024 Tech Support: (888) 997-8267
Polytechnic University Brooklyn, NY PI: Vikram Kapila URL:
 Science and Mechatronics Aided Research for Teachers (SMART): A Research Experience for Teachers Site in Mechatronics NSF Grant # EEC 0227479 Polytechnic University Brooklyn, NY PI: Vikram Kapila URL:
Science and Mechatronics Aided Research for Teachers (SMART): A Research Experience for Teachers Site in Mechatronics NSF Grant # EEC 0227479 Polytechnic University Brooklyn, NY PI: Vikram Kapila URL:
II. LITERATURE REVIEW
 International Journal of Engineering Science Invention ISSN (Online): 2319 6734, ISSN (Print): 2319 6726 Volume 6 Issue 9 September 2017 PP. 41-45 Bionic Arm * Nayim Ali Khan 1, Nagesh K 2, Rahul R 3 BE
International Journal of Engineering Science Invention ISSN (Online): 2319 6734, ISSN (Print): 2319 6726 Volume 6 Issue 9 September 2017 PP. 41-45 Bionic Arm * Nayim Ali Khan 1, Nagesh K 2, Rahul R 3 BE
TEAM AERO-I TEAM AERO-I JOURNAL PAPER DELHI TECHNOLOGICAL UNIVERSITY Journal paper for IARC 2014
 TEAM AERO-I TEAM AERO-I JOURNAL PAPER DELHI TECHNOLOGICAL UNIVERSITY DELHI TECHNOLOGICAL UNIVERSITY Journal paper for IARC 2014 2014 IARC ABSTRACT The paper gives prominence to the technical details of
TEAM AERO-I TEAM AERO-I JOURNAL PAPER DELHI TECHNOLOGICAL UNIVERSITY DELHI TECHNOLOGICAL UNIVERSITY Journal paper for IARC 2014 2014 IARC ABSTRACT The paper gives prominence to the technical details of
Special Sensor Report: CMUcam. David Winkler 12/10/02 Intelligent Machines Design Lab Dr. A. A. Arroyo TAs: Uriel Rodriguez Jason Plew
 Special Sensor Report: CMUcam David Winkler 12/10/02 Intelligent Machines Design Lab Dr. A. A. Arroyo TAs: Uriel Rodriguez Jason Plew Introduction This report covers the CMUcam and how I was able to use
Special Sensor Report: CMUcam David Winkler 12/10/02 Intelligent Machines Design Lab Dr. A. A. Arroyo TAs: Uriel Rodriguez Jason Plew Introduction This report covers the CMUcam and how I was able to use
Total Hours Registration through Website or for further details please visit (Refer Upcoming Events Section)
") Total Hours 110-150 Registration Q R Code Registration through Website or for further details please visit http://www.rknec.edu/ (Refer Upcoming Events Section) Module 1: Basics of Microprocessor & Microcontroller
Total Hours 110-150 Registration Q R Code Registration through Website or for further details please visit http://www.rknec.edu/ (Refer Upcoming Events Section) Module 1: Basics of Microprocessor & Microcontroller
Non-holonomic Robotic Control Using the BasicX-24p Microcontroller
 Abstract Session IT 301-018 Non-holonomic Robotic Control Using the BasicX-24p Microcontroller John M. Kuperavage, CIT Multi-Dimensional Integration jkuperavage@mdiadvantage.com John R. Wright, Jr., Ph.D.,
Abstract Session IT 301-018 Non-holonomic Robotic Control Using the BasicX-24p Microcontroller John M. Kuperavage, CIT Multi-Dimensional Integration jkuperavage@mdiadvantage.com John R. Wright, Jr., Ph.D.,
Mechatronics Engineering and Automation Faculty of Engineering, Ain Shams University MCT-151, Spring 2015 Lab-4: Electric Actuators
 Mechatronics Engineering and Automation Faculty of Engineering, Ain Shams University MCT-151, Spring 2015 Lab-4: Electric Actuators Ahmed Okasha, Assistant Lecturer okasha1st@gmail.com Objective Have a
Mechatronics Engineering and Automation Faculty of Engineering, Ain Shams University MCT-151, Spring 2015 Lab-4: Electric Actuators Ahmed Okasha, Assistant Lecturer okasha1st@gmail.com Objective Have a
Jaguar Motor Controller (Stellaris Brushed DC Motor Control Module with CAN)
") Jaguar Motor Controller (Stellaris Brushed DC Motor Control Module with CAN) 217-3367 Ordering Information Product Number Description 217-3367 Stellaris Brushed DC Motor Control Module with CAN (217-3367)
Jaguar Motor Controller (Stellaris Brushed DC Motor Control Module with CAN) 217-3367 Ordering Information Product Number Description 217-3367 Stellaris Brushed DC Motor Control Module with CAN (217-3367)
Boe-Bot robot manual
 Tallinn University of Technology Department of Computer Engineering Chair of Digital Systems Design Boe-Bot robot manual Priit Ruberg Erko Peterson Keijo Lass Tallinn 2016 Contents 1 Robot hardware description...3
Tallinn University of Technology Department of Computer Engineering Chair of Digital Systems Design Boe-Bot robot manual Priit Ruberg Erko Peterson Keijo Lass Tallinn 2016 Contents 1 Robot hardware description...3
AUTOMATIC RAILWAY CROSSING SYSTEM
 International Journal of Electrical and Electronics Engineering (IJEEE) ISSN(P): 2278-9944; ISSN(E): 2278-9952 Vol. 3, Issue 4, July 2014, 17-22 IASET AUTOMATIC RAILWAY CROSSING SYSTEM AKRITI & UPENDRA
International Journal of Electrical and Electronics Engineering (IJEEE) ISSN(P): 2278-9944; ISSN(E): 2278-9952 Vol. 3, Issue 4, July 2014, 17-22 IASET AUTOMATIC RAILWAY CROSSING SYSTEM AKRITI & UPENDRA
Visual Perception Based Behaviors for a Small Autonomous Mobile Robot
 Visual Perception Based Behaviors for a Small Autonomous Mobile Robot Scott Jantz and Keith L Doty Machine Intelligence Laboratory Mekatronix, Inc. Department of Electrical and Computer Engineering Gainesville,
Visual Perception Based Behaviors for a Small Autonomous Mobile Robot Scott Jantz and Keith L Doty Machine Intelligence Laboratory Mekatronix, Inc. Department of Electrical and Computer Engineering Gainesville,
Mapping device with wireless communication
 University of Arkansas, Fayetteville ScholarWorks@UARK Electrical Engineering Undergraduate Honors Theses Electrical Engineering 12-2011 Mapping device with wireless communication Xiangyu Liu University
University of Arkansas, Fayetteville ScholarWorks@UARK Electrical Engineering Undergraduate Honors Theses Electrical Engineering 12-2011 Mapping device with wireless communication Xiangyu Liu University
Abstract. 1. Introduction
 Trans Am: An Experiment in Autonomous Navigation Jason W. Grzywna, Dr. A. Antonio Arroyo Machine Intelligence Laboratory Dept. of Electrical Engineering University of Florida, USA Tel. (352) 392-6605 Email:
Trans Am: An Experiment in Autonomous Navigation Jason W. Grzywna, Dr. A. Antonio Arroyo Machine Intelligence Laboratory Dept. of Electrical Engineering University of Florida, USA Tel. (352) 392-6605 Email:
Lab 06: Ohm s Law and Servo Motor Control
 CS281: Computer Systems Lab 06: Ohm s Law and Servo Motor Control The main purpose of this lab is to build a servo motor control circuit. As with prior labs, there will be some exploratory sections designed
CS281: Computer Systems Lab 06: Ohm s Law and Servo Motor Control The main purpose of this lab is to build a servo motor control circuit. As with prior labs, there will be some exploratory sections designed
ME375 Lab Project. Bradley Boane & Jeremy Bourque April 25, 2018
 ME375 Lab Project Bradley Boane & Jeremy Bourque April 25, 2018 Introduction: The goal of this project was to build and program a two-wheel robot that travels forward in a straight line for a distance
ME375 Lab Project Bradley Boane & Jeremy Bourque April 25, 2018 Introduction: The goal of this project was to build and program a two-wheel robot that travels forward in a straight line for a distance
INDY R2000 Module Series Specification
 1 Table 1: Module Overview Module Type M-2600 M-2800 Real Photo RF Channel Single Channel Four channel RF Connector MMCX SMA Antenna Connection Mode Can be configured as a single Bistatic is unavailable
1 Table 1: Module Overview Module Type M-2600 M-2800 Real Photo RF Channel Single Channel Four channel RF Connector MMCX SMA Antenna Connection Mode Can be configured as a single Bistatic is unavailable
Intuitive Vision Robot Kit For Efficient Education
 Intuitive Vision Robot Kit For Efficient Education OH SangHun a, CHO SungKu b, YU BaekWoon c, Ji Hyun Park d Yonsei University a & Kwangwoon University b Sanghun_oh@yonsei.ac.kr, pot1213@naver.com, bwrew2@gmail.com,
Intuitive Vision Robot Kit For Efficient Education OH SangHun a, CHO SungKu b, YU BaekWoon c, Ji Hyun Park d Yonsei University a & Kwangwoon University b Sanghun_oh@yonsei.ac.kr, pot1213@naver.com, bwrew2@gmail.com,
Building an autonomous light finder robot
 LinuxFocus article number 297 http://linuxfocus.org Building an autonomous light finder robot by Katja and Guido Socher About the authors: Katja is the
LinuxFocus article number 297 http://linuxfocus.org Building an autonomous light finder robot by Katja and Guido Socher About the authors: Katja is the
ADVANCED SAFETY APPLICATIONS FOR RAILWAY CROSSING
 ADVANCED SAFETY APPLICATIONS FOR RAILWAY CROSSING 1 HARSHUL BALANI, 2 CHARU GUPTA, 3 KRATIKA SUKHWAL 1,2,3 B.TECH (ECE), Poornima College Of Engineering, RTU E-mail; 1 harshul.balani@gmail.com, 2 charu95g@gmail.com,
ADVANCED SAFETY APPLICATIONS FOR RAILWAY CROSSING 1 HARSHUL BALANI, 2 CHARU GUPTA, 3 KRATIKA SUKHWAL 1,2,3 B.TECH (ECE), Poornima College Of Engineering, RTU E-mail; 1 harshul.balani@gmail.com, 2 charu95g@gmail.com,
Megamark Arduino Library Documentation
 Megamark Arduino Library Documentation The Choitek Megamark is an advanced full-size multipurpose mobile manipulator robotics platform for students, artists, educators and researchers alike. In our mission
Megamark Arduino Library Documentation The Choitek Megamark is an advanced full-size multipurpose mobile manipulator robotics platform for students, artists, educators and researchers alike. In our mission
ECE 511: MICROPROCESSORS
 ECE 511: MICROPROCESSORS A project report on SNIFFING DOG Under the guidance of Prof. Jens Peter Kaps By, Preethi Santhanam (G00767634) Ranjit Mandavalli (G00819673) Shaswath Raghavan (G00776950) Swathi
ECE 511: MICROPROCESSORS A project report on SNIFFING DOG Under the guidance of Prof. Jens Peter Kaps By, Preethi Santhanam (G00767634) Ranjit Mandavalli (G00819673) Shaswath Raghavan (G00776950) Swathi
ARDUINO BASED CALIBRATION OF AN INERTIAL SENSOR IN VIEW OF A GNSS/IMU INTEGRATION
 Journal of Young Scientist, Volume IV, 2016 ISSN 2344-1283; ISSN CD-ROM 2344-1291; ISSN Online 2344-1305; ISSN-L 2344 1283 ARDUINO BASED CALIBRATION OF AN INERTIAL SENSOR IN VIEW OF A GNSS/IMU INTEGRATION
Journal of Young Scientist, Volume IV, 2016 ISSN 2344-1283; ISSN CD-ROM 2344-1291; ISSN Online 2344-1305; ISSN-L 2344 1283 ARDUINO BASED CALIBRATION OF AN INERTIAL SENSOR IN VIEW OF A GNSS/IMU INTEGRATION
Application Note Closed-Loop Motor Control
 Application Note ClosedLoop Motor Control Contact: Brazen Tek, Inc. 011 Ventura Blvd. Suite 10 Woodland Hills, CA 916 Tel/Fax: (818) 1096 Email: info@brazentek.com January 009 Introduction Based on the
Application Note ClosedLoop Motor Control Contact: Brazen Tek, Inc. 011 Ventura Blvd. Suite 10 Woodland Hills, CA 916 Tel/Fax: (818) 1096 Email: info@brazentek.com January 009 Introduction Based on the
2.017 DESIGN OF ELECTROMECHANICAL ROBOTIC SYSTEMS Fall 2009 Lab 4: Motor Control. October 5, 2009 Dr. Harrison H. Chin
 2.017 DESIGN OF ELECTROMECHANICAL ROBOTIC SYSTEMS Fall 2009 Lab 4: Motor Control October 5, 2009 Dr. Harrison H. Chin Formal Labs 1. Microcontrollers Introduction to microcontrollers Arduino microcontroller
2.017 DESIGN OF ELECTROMECHANICAL ROBOTIC SYSTEMS Fall 2009 Lab 4: Motor Control October 5, 2009 Dr. Harrison H. Chin Formal Labs 1. Microcontrollers Introduction to microcontrollers Arduino microcontroller
For Experimenters and Educators
 For Experimenters and Educators ARobot (pronounced "A robot") is a computer controlled mobile robot designed for Experimenters and Educators. Ages 14 and up (younger with help) can enjoy unlimited experimentation
For Experimenters and Educators ARobot (pronounced "A robot") is a computer controlled mobile robot designed for Experimenters and Educators. Ages 14 and up (younger with help) can enjoy unlimited experimentation
Brushed DC Motor Control. Module with CAN (MDL-BDC24)
") Stellaris Brushed DC Motor Control Module with CAN (MDL-BDC24) Ordering Information Product No. MDL-BDC24 RDK-BDC24 Description Stellaris Brushed DC Motor Control Module with CAN (MDL-BDC24) for Single-Unit
Stellaris Brushed DC Motor Control Module with CAN (MDL-BDC24) Ordering Information Product No. MDL-BDC24 RDK-BDC24 Description Stellaris Brushed DC Motor Control Module with CAN (MDL-BDC24) for Single-Unit
C++ PROGRAM FOR DRIVING OF AN AGRICOL ROBOT
 Annals of the University of Petroşani, Mechanical Engineering, 14 (2012), 11-19 11 C++ PROGRAM FOR DRIVING OF AN AGRICOL ROBOT STELIAN-VALENTIN CASAVELA 1 Abstract: This robot is projected to participate
Annals of the University of Petroşani, Mechanical Engineering, 14 (2012), 11-19 11 C++ PROGRAM FOR DRIVING OF AN AGRICOL ROBOT STELIAN-VALENTIN CASAVELA 1 Abstract: This robot is projected to participate
DC motor control using arduino
 DC motor control using arduino 1) Introduction: First we need to differentiate between DC motor and DC generator and where we can use it in this experiment. What is the main different between the DC-motor,
DC motor control using arduino 1) Introduction: First we need to differentiate between DC motor and DC generator and where we can use it in this experiment. What is the main different between the DC-motor,
MICROCONTROLLER BASED SPEED SYNCHRONIZATION OF MULTIPLE DC MOTORS IN TEXTILE APPLICATIONS
 MICROCONTROLLER BASED SPEED SYNCHRONIZATION OF MULTIPLE DC MOTORS IN TEXTILE APPLICATIONS 1 RAKSHA A R, 2 KAVYA B, 3 PRAVEENA ANAJI, 4 NANDESH K N 1,2 UG student, 3,4 Assistant Professor Department of
MICROCONTROLLER BASED SPEED SYNCHRONIZATION OF MULTIPLE DC MOTORS IN TEXTILE APPLICATIONS 1 RAKSHA A R, 2 KAVYA B, 3 PRAVEENA ANAJI, 4 NANDESH K N 1,2 UG student, 3,4 Assistant Professor Department of
AN ARDUINO CONTROLLED CHAOTIC PENDULUM FOR A REMOTE PHYSICS LABORATORY
 AN ARDUINO CONTROLLED CHAOTIC PENDULUM FOR A REMOTE PHYSICS LABORATORY J. C. Álvarez, J. Lamas, A. J. López, A. Ramil Universidade da Coruña (SPAIN) carlos.alvarez@udc.es, jlamas@udc.es, ana.xesus.lopez@udc.es,
AN ARDUINO CONTROLLED CHAOTIC PENDULUM FOR A REMOTE PHYSICS LABORATORY J. C. Álvarez, J. Lamas, A. J. López, A. Ramil Universidade da Coruña (SPAIN) carlos.alvarez@udc.es, jlamas@udc.es, ana.xesus.lopez@udc.es,
Solar Powered Obstacle Avoiding Robot
 Solar Powered Obstacle Avoiding Robot S.S. Subashka Ramesh 1, Tarun Keshri 2, Sakshi Singh 3, Aastha Sharma 4 1 Asst. professor, SRM University, Chennai, Tamil Nadu, India. 2, 3, 4 B.Tech Student, SRM
Solar Powered Obstacle Avoiding Robot S.S. Subashka Ramesh 1, Tarun Keshri 2, Sakshi Singh 3, Aastha Sharma 4 1 Asst. professor, SRM University, Chennai, Tamil Nadu, India. 2, 3, 4 B.Tech Student, SRM
Linear vs. PWM/ Digital Drives
 APPLICATION NOTE 125 Linear vs. PWM/ Digital Drives INTRODUCTION Selecting the correct drive technology can be a confusing process. Understanding the difference between linear (Class AB) type drives and
APPLICATION NOTE 125 Linear vs. PWM/ Digital Drives INTRODUCTION Selecting the correct drive technology can be a confusing process. Understanding the difference between linear (Class AB) type drives and
High Speed Continuous Rotation Servo (# )
") Web Site: www.parallax.com Forums: forums.parallax.com Sales: sales@parallax.com Technical: support@parallax.com Office: (916) 624-8333 Fax: (916) 624-8003 Sales: (888) 512-1024 Tech Support: (888) 997-8267
Web Site: www.parallax.com Forums: forums.parallax.com Sales: sales@parallax.com Technical: support@parallax.com Office: (916) 624-8333 Fax: (916) 624-8003 Sales: (888) 512-1024 Tech Support: (888) 997-8267
PCB & Circuit Designing
 (Summer Training Program) 4 Weeks/30 Days PRESENTED BY RoboSpecies Technologies Pvt. Ltd. Office: W-53G, Sector-11, Noida-201301, U.P. Contact us: Email: stp@robospecies.com Website: www.robospecies.com
(Summer Training Program) 4 Weeks/30 Days PRESENTED BY RoboSpecies Technologies Pvt. Ltd. Office: W-53G, Sector-11, Noida-201301, U.P. Contact us: Email: stp@robospecies.com Website: www.robospecies.com
Designing of a Shooting System Using Ultrasonic Radar Sensor
 2017 Published in 5th International Symposium on Innovative Technologies in Engineering and Science 29-30 September 2017 (ISITES2017 Baku - Azerbaijan) Designing of a Shooting System Using Ultrasonic Radar
2017 Published in 5th International Symposium on Innovative Technologies in Engineering and Science 29-30 September 2017 (ISITES2017 Baku - Azerbaijan) Designing of a Shooting System Using Ultrasonic Radar
Arduino Based Robot for Pick and Place Application
 Arduino Based Robot for Pick and Place Application Priya H. Pande Pallavi V. Saklecha Prof. Pragati D. Pawar Prof. Atul N. Shire Abstract Here, the project is designed to develop a system in which robot
Arduino Based Robot for Pick and Place Application Priya H. Pande Pallavi V. Saklecha Prof. Pragati D. Pawar Prof. Atul N. Shire Abstract Here, the project is designed to develop a system in which robot
The Torxis Linear Servo meets the following environmental conditions:
 Page: 1 1. PRODUCT DESCRIPTION The Torxis Linear Servo is the second generation of linear servos provided by GearWurx. This product features internal position sensing, and closed loop position control.
Page: 1 1. PRODUCT DESCRIPTION The Torxis Linear Servo is the second generation of linear servos provided by GearWurx. This product features internal position sensing, and closed loop position control.
Implement a Robot for the Trinity College Fire Fighting Robot Competition.
 Alan Kilian Fall 2011 Implement a Robot for the Trinity College Fire Fighting Robot Competition. Page 1 Introduction: The successful completion of an individualized degree in Mechatronics requires an understanding
Alan Kilian Fall 2011 Implement a Robot for the Trinity College Fire Fighting Robot Competition. Page 1 Introduction: The successful completion of an individualized degree in Mechatronics requires an understanding
Blue Point Engineering Inc.
 Engineering Inc. ireless Radio Control of Puppets Setup Overview RF Control C Pointing the ay to Solutions! Hardware Setup Overview Page 1 Servo No.1 Servo No.2 Control Signal Line RX8ch1,2 Servo Board
Engineering Inc. ireless Radio Control of Puppets Setup Overview RF Control C Pointing the ay to Solutions! Hardware Setup Overview Page 1 Servo No.1 Servo No.2 Control Signal Line RX8ch1,2 Servo Board
Hybrid Power Autonomous Model Vehicle. Yizhao Zhuang. Chike Uduku. Matt Hinnenkamp. March 9, Department of Electrical and Computer Engineering
 Hybrid Power Autonomous Model Vehicle Yizhao Zhuang Chike Uduku Matt Hinnenkamp March 9, 2009 Department of Electrical and Computer Engineering University of Minnesota Duluth Duluth, MN 55812 Approved
Hybrid Power Autonomous Model Vehicle Yizhao Zhuang Chike Uduku Matt Hinnenkamp March 9, 2009 Department of Electrical and Computer Engineering University of Minnesota Duluth Duluth, MN 55812 Approved
PCB & Circuit Designing (Summer Training Program 2014)
") (Summer Training Program 2014) PRESENTED BY In association with RoboSpecies Technologies Pvt. Ltd. Office: A-90, Lower Ground Floor, Sec- 4, Noida, UP Contact us: Email: stp@robospecies.com Website: www.robospecies.com
(Summer Training Program 2014) PRESENTED BY In association with RoboSpecies Technologies Pvt. Ltd. Office: A-90, Lower Ground Floor, Sec- 4, Noida, UP Contact us: Email: stp@robospecies.com Website: www.robospecies.com
Robot Rangers. Low Level Design Document. Ben Andersen Jennifer Berry Graham Boechler Andrew Setter
 Robot Rangers Low Level Design Document Ben Andersen Jennifer Berry Graham Boechler Andrew Setter 2/17/2011 1 Table of Contents Introduction 3 Problem Statement and Proposed Solution 3 System Description
Robot Rangers Low Level Design Document Ben Andersen Jennifer Berry Graham Boechler Andrew Setter 2/17/2011 1 Table of Contents Introduction 3 Problem Statement and Proposed Solution 3 System Description
Mechatronics Laboratory Assignment 3 Introduction to I/O with the F28335 Motor Control Processor
 Mechatronics Laboratory Assignment 3 Introduction to I/O with the F28335 Motor Control Processor Recommended Due Date: By your lab time the week of February 12 th Possible Points: If checked off before
Mechatronics Laboratory Assignment 3 Introduction to I/O with the F28335 Motor Control Processor Recommended Due Date: By your lab time the week of February 12 th Possible Points: If checked off before
International Journal of Advance Engineering and Research Development
 Scientific Journal of Impact Factor (SJIF): 4.14 International Journal of Advance Engineering and Research Development Volume 3, Issue 2, February -2016 e-issn (O): 2348-4470 p-issn (P): 2348-6406 SIMULATION
Scientific Journal of Impact Factor (SJIF): 4.14 International Journal of Advance Engineering and Research Development Volume 3, Issue 2, February -2016 e-issn (O): 2348-4470 p-issn (P): 2348-6406 SIMULATION
Cedarville University Little Blue
 Cedarville University Little Blue IGVC Robot Design Report June 2004 Team Members: Silas Gibbs Kenny Keslar Tim Linden Jonathan Struebel Faculty Advisor: Dr. Clint Kohl Table of Contents 1. Introduction...
Cedarville University Little Blue IGVC Robot Design Report June 2004 Team Members: Silas Gibbs Kenny Keslar Tim Linden Jonathan Struebel Faculty Advisor: Dr. Clint Kohl Table of Contents 1. Introduction...
The Datasheet and Interfacing EE3376
 The Datasheet and Interfacing EE3376 MSP430 Datasheet Modes of the MSP430 Active Mode (this class) LPM0 (CPU asleep) LPM3 (only ACLK on) LPM4 (sleep mode) 0 0 0 0 250uA 0 0 0 1 35 ua 1 1 0 1 1 ua 1 1 1
The Datasheet and Interfacing EE3376 MSP430 Datasheet Modes of the MSP430 Active Mode (this class) LPM0 (CPU asleep) LPM3 (only ACLK on) LPM4 (sleep mode) 0 0 0 0 250uA 0 0 0 1 35 ua 1 1 0 1 1 ua 1 1 1
Chapter #5: Measuring Rotation
 Chapter #5: Measuring Rotation Page 139 Chapter #5: Measuring Rotation ADJUSTING DIALS AND MONITORING MACHINES Many households have dials to control the lighting in a room. Twist the dial one direction,
Chapter #5: Measuring Rotation Page 139 Chapter #5: Measuring Rotation ADJUSTING DIALS AND MONITORING MACHINES Many households have dials to control the lighting in a room. Twist the dial one direction,
Chapter 3: Assemble and Test Your Boe-Bot
 Chapter 3: Assemble and Test Your Boe-Bot Page 91 Chapter 3: Assemble and Test Your Boe-Bot This chapter contains instructions for building and testing your Boe-Bot. It s especially important to complete
Chapter 3: Assemble and Test Your Boe-Bot Page 91 Chapter 3: Assemble and Test Your Boe-Bot This chapter contains instructions for building and testing your Boe-Bot. It s especially important to complete
Team Autono-Mo. Jacobia. Department of Computer Science and Engineering The University of Texas at Arlington
 Department of Computer Science and Engineering The University of Texas at Arlington Team Autono-Mo Jacobia Architecture Design Specification Team Members: Bill Butts Darius Salemizadeh Lance Storey Yunesh
Department of Computer Science and Engineering The University of Texas at Arlington Team Autono-Mo Jacobia Architecture Design Specification Team Members: Bill Butts Darius Salemizadeh Lance Storey Yunesh
Wirelessly Controlled Wheeled Robotic Arm
 Wirelessly Controlled Wheeled Robotic Arm Muhammmad Tufail 1, Mian Muhammad Kamal 2, Muhammad Jawad 3 1 Department of Electrical Engineering City University of science and Information Technology Peshawar
Wirelessly Controlled Wheeled Robotic Arm Muhammmad Tufail 1, Mian Muhammad Kamal 2, Muhammad Jawad 3 1 Department of Electrical Engineering City University of science and Information Technology Peshawar
Workshops Elisava Introduction to programming and electronics (Scratch & Arduino)
") Workshops Elisava 2011 Introduction to programming and electronics (Scratch & Arduino) What is programming? Make an algorithm to do something in a specific language programming. Algorithm: a procedure
Workshops Elisava 2011 Introduction to programming and electronics (Scratch & Arduino) What is programming? Make an algorithm to do something in a specific language programming. Algorithm: a procedure
HAND GESTURE CONTROLLED ROBOT USING ARDUINO
 HAND GESTURE CONTROLLED ROBOT USING ARDUINO Vrushab Sakpal 1, Omkar Patil 2, Sagar Bhagat 3, Badar Shaikh 4, Prof.Poonam Patil 5 1,2,3,4,5 Department of Instrumentation Bharati Vidyapeeth C.O.E,Kharghar,Navi
HAND GESTURE CONTROLLED ROBOT USING ARDUINO Vrushab Sakpal 1, Omkar Patil 2, Sagar Bhagat 3, Badar Shaikh 4, Prof.Poonam Patil 5 1,2,3,4,5 Department of Instrumentation Bharati Vidyapeeth C.O.E,Kharghar,Navi
Motion Control of a Three Active Wheeled Mobile Robot and Collision-Free Human Following Navigation in Outdoor Environment
 Proceedings of the International MultiConference of Engineers and Computer Scientists 2016 Vol I,, March 16-18, 2016, Hong Kong Motion Control of a Three Active Wheeled Mobile Robot and Collision-Free
Proceedings of the International MultiConference of Engineers and Computer Scientists 2016 Vol I,, March 16-18, 2016, Hong Kong Motion Control of a Three Active Wheeled Mobile Robot and Collision-Free
Mech 296: Vision for Robotic Applications. Logistics
 Mech 296: Vision for Robotic Applications http://www.acroname.com/ Lecture 6: Embedded Vision and Control 6.1 Logistics Homework #3 / Lab #1 return Homework #4 questions Lab #2 discussion Final Project
Mech 296: Vision for Robotic Applications http://www.acroname.com/ Lecture 6: Embedded Vision and Control 6.1 Logistics Homework #3 / Lab #1 return Homework #4 questions Lab #2 discussion Final Project
Autonomous Following RObot Critical Design Review
 Autonomous Following RObot Critical Design Review James Tse (Leader) Wei Dai Travis Frecker Peter Verlangieri Professor John Johnson ECE 189A Fall 2012 Critical Design Review: Project Description A robot
Autonomous Following RObot Critical Design Review James Tse (Leader) Wei Dai Travis Frecker Peter Verlangieri Professor John Johnson ECE 189A Fall 2012 Critical Design Review: Project Description A robot
ECE 477 Digital Systems Senior Design Project Rev 8/09. Homework 5: Theory of Operation and Hardware Design Narrative
 ECE 477 Digital Systems Senior Design Project Rev 8/09 Homework 5: Theory of Operation and Hardware Design Narrative Team Code Name: _ATV Group No. 3 Team Member Completing This Homework: Sebastian Hening
ECE 477 Digital Systems Senior Design Project Rev 8/09 Homework 5: Theory of Operation and Hardware Design Narrative Team Code Name: _ATV Group No. 3 Team Member Completing This Homework: Sebastian Hening
A Micro-Controller Based Robotics Course for ME Students
 A Micro-Controller Based Robotics Course for ME Students Wayne Walter, PhD, P.E. Gleason Professor of Mechanical Engineering Rochester Institute of Technology Rochester, NY 14623 Session 1566 Introduction
A Micro-Controller Based Robotics Course for ME Students Wayne Walter, PhD, P.E. Gleason Professor of Mechanical Engineering Rochester Institute of Technology Rochester, NY 14623 Session 1566 Introduction
Directions for Wiring and Using The GEARS II (2) Channel Combination Controllers
 Channel Combination Controllers") Directions for Wiring and Using The GEARS II (2) Channel Combination Controllers PWM Input Signal Cable for the Valve Controller Plugs into the RC Receiver or Microprocessor Signal line. White = PWM Input
Directions for Wiring and Using The GEARS II (2) Channel Combination Controllers PWM Input Signal Cable for the Valve Controller Plugs into the RC Receiver or Microprocessor Signal line. White = PWM Input
Automobile Prototype Servo Control
 IJIRST International Journal for Innovative Research in Science & Technology Volume 2 Issue 10 March 2016 ISSN (online): 2349-6010 Automobile Prototype Servo Control Mr. Linford William Fernandes Don Bosco
IJIRST International Journal for Innovative Research in Science & Technology Volume 2 Issue 10 March 2016 ISSN (online): 2349-6010 Automobile Prototype Servo Control Mr. Linford William Fernandes Don Bosco
Design of Tracked Robot with Remote Control for Surveillance
 Proceedings of the 2014 International Conference on Advanced Mechatronic Systems, Kumamoto, Japan, August 10-12, 2014 Design of Tracked Robot with Remote Control for Surveillance Widodo Budiharto School
Proceedings of the 2014 International Conference on Advanced Mechatronic Systems, Kumamoto, Japan, August 10-12, 2014 Design of Tracked Robot with Remote Control for Surveillance Widodo Budiharto School