Implement a Robot for the Trinity College Fire Fighting Robot Competition.
|
|
|
- Ferdinand Dawson
- 5 years ago
- Views:
Transcription
1 Alan Kilian Fall 2011 Implement a Robot for the Trinity College Fire Fighting Robot Competition. Page 1
2 Introduction: The successful completion of an individualized degree in Mechatronics requires an understanding of mechanical, electrical and computer systems as well as the tools used to design and implement each of these systems to produce a machine capable of performing a specific task. This major project will allow me to learn these tools through self-paced experiential learning, the learning method which is most successful for me. In my previous individualized study projects Design and Construct a Holonomic Motion Platform and Control System; and, Design and Construct an Absolute Heading Sensor for a Robot. I built a three-wheeled robot and a computer to control it as well as a sensor to determine the direction the robot is pointed. For my major project, I will add a flame detector and write software so that the robot can complete several tasks described in the 2001 Trinity College Fire Fighting competition documents including the requirements originally stated in my Project #2 Design and Construct a Holonomic Motion Platform and Control System and adding the Fires and Extinguishing the Candle requirements described below. The requirements I intend to test are as follows: Operation: Once turned on, the robot must be autonomous: self-controlled without any human intervention. Fire-fighting robots must not be manually controlled. A robot may bump into or touch the walls of the arena as it travels, but it cannot mark, dislodge, or damage the walls in doing so. The robot must not leave anything behind as it travels through the arena. It must not make any marks on the floor of the arena that aid in navigation as it travels. Dimensions: The robot must fit in a Bounding Box with a base 31 x 31 cm square and 27 cm high. If the robot has feelers to sense an object or wall, the feelers will be counted as part of the robot s total dimensions. Fires: For obvious reasons of safety and economy, fires will be simulated by small candle flames. The candle flame will be from 15 cm to 20 cm above the nominal floor level. The candle thickness normally will be between 2 cm and 3 cm. The exact height and size of the flame will change throughout the contest depending upon the condition of candle and its surroundings. The robot is required to find the candle no matter what the size of the flame is at that particular moment. Extinguishing the Candle: The robot must, in the opinion of the Judges, have found the candle before it attempts to put it out. For example, the robot cannot just flood the arena with CO2 thereby putting the flame out by accident. The robot must not use any destructive or dangerous methods to put out the candle. The robot may extinguish the candle by blowing air or other oxygen-bearing gas. The Page 2
3 robot must come within 30 cm of the candle before it attempts to extinguish the flame. There will be a white 30 cm radius solid circle (or circle segment, if the candle is near a wall) on the floor around the candle, and the candle will be placed in the center of the circle. The robot must have some part of its body over the circle before it extinguishes the candle flame. This project is informed by learning in my Depth Criteria and my Extended Studies in Mathematics, Physics and Mechanics. The knowledge gained in the courses of Engineering Fortran, Operating Systems and Data Communications and Distributed Processing allowed me to write the software algorithms required to accomplish the goals of the firefighting competition. The courses I took in Mechanical Engineering: Systems Dynamics and Control and Analog and Digital Control, as well as my Project #1 Develop a tuning guide for PID control systems allowed me to select, write and test appropriate motion controlling algorithms so that I was able to cause the robot to move in a way necessary to accomplish the goals of the firefighting competition. This project is intended as a demonstration of my skills in five specific areas: To understand the mechanical, electrical and computer systems; and tools to design and implement each system in the production of a machine capable of performing a task. To understand the rules, regulations and goals of the Trinity College Fire Fighting competition. To determine a computer system that allows the robot to complete a subset of the competition's goals as listed above. To build a working robot, specifically select electrical components, fabricate parts, write software and assemble a robot to meet the rules and complete goals of the Trinity College Fire Fighting competition. To test the robot s ability to complete task of the Trinity College Firefighting competition including a formal test plan. Typically a robot is designed for a specific purpose such as painting an automobile or putting labels on cans. An undergraduate project such as this one does not have the luxury of a set of requirements for the robot and it is difficult to make up arbitrary requirements. In order to reduce the possible set of requirements to a set that is manageable I have chosen to design and building a robot capable of competing in the Trinity College robot fire-fighting competition. This competition has held annual competitions for more than 15 years and the rules have evolved into a clear, concise document. I am using the competition rules as a guide to help make design choices for the robot in this project even though I may never compete in the fire fighting competition. The main goal in the Trinity competition is to create a fully autonomous robot capable of moving through a maze-like structure, find a lit candle and extinguish the flame. Page 3
4 In this report, I will present the design of the robot called Trippy. I will explain the design choices I made and the results of those decisions. Page 4

5 Design To understand the mechanical, electrical and computer systems; and tools to design and implement each system in the production of a machine capable of performing a task. Figure 1 Trippy outside view Power system design: Demonstrate the ability to calculate a theoretical estimate of electrical power consumption, to design an appropriate power source, to construct a power source and to measure the performance of the power source, verifying that it meets the design goal of providing enough power to run the robot for 30 minutes. The robot s power source and recharging circuitry were completely described in Project #2. An overview of the power supply is provided here: The robot has several types of power consuming devices: motors, main processor, motor-control processors, distance sensing devices, a flame sensing device, a DC fan and a display Power for the robot is provided by two Makita brand NiCd battery packs rated at 9.6 Volts and 1500 milliamp-hours. Each battery pack can produce 14,400 milliwatt Hours. I used two battery packs, so the power system is capable of providing approximately 29,000 milliwatt-hours of power. This design is significantly over-rated for the task of Page 5

6 providing power for the robot for 30 minutes of continuous operation, and provides a good margin of excess power for unanticipated loads such as sensors and communication devices that may be added in the future. Actual current was measured on September and was found to be 190 milliamps when measured at the 18.5 Volt DC supply. This is a power draw of 3.5 Watts which is less than the estimated value. The robot was placed on a concrete floor and ran in a circle for 30-minutes. After this demonstration, the battery voltage measured 18.4 Volts DC. Electronic circuit design: Demonstrate the ability to select electronic components suitable for use in implementing a closed-loop control system for small electric motors. The robot s circuit design was completely described in Project #2. An overview of the circuit design is provided here I used an example circuit from the J.R. KERR reference design to implement a four channel PID motor control system. Figure 2 Complete schematic Page 6


7 Printed circuit board design: Demonstrate the use of printed circuit board design tools at an intermediate level. The robot s PCB design was completely described in Project #2. An overview of the PCB design is provided here: The schematic from the above electrical design was used to produce a PCB layout. The layout was sent to the Olimex Company in Bulgaria. The resulting PCBs were checked for errors, the errors were corrected and integrated circuits were soldered to the PCBs. The system was tested and errors were corrected. Figure 3Complete motor driver board with motors Figure 4Motor driver board and CPU stacked Page 7
 available on the")
8 Mechanical system design: Demonstrate the ability to select mechanical components, fabricate machined parts and assemble a simple working mechanical system. The mechanical design of this robot was thoroughly described in Project #2 and a summary is presented here: Figure 5Palm Pilot Robot inspiration The Palm Pilot Robot Kit (PPRK) available on the internet was my inspiration for the wheel design for Trippy. It uses hobby servos to directly drive the wheels. This design has several disadvantages. All the weight of the robot produces torque on the output shaft of the hobby servo and will increase the wear on the output bearings and will result in failure of that part of the mechanical system. I designed a mechanical system that supports the robot weight on two bearings so that there will be no torque on the motor output shaft. Page 8

9 Figure 6 Trippy wheel mechanical design This mechanical design is sturdy and easily constructed with simple tools. It is easy to align the motor shaft with the end bearing, and remains in alignment without needing periodic adjustment. The entire mechanical assembly can be removed from a structure and reattached without needing any disassembly The initial mechanical structure for Trippy was a triangular base constructed of aluminum U channel with a wheel assembly at each end. This is a pleasing setup to look at, but would have required externally mounted batteries and electronics. Figure 7 Prototype with battery packs Page 9

10 Figure 8Initial design motor controller and CPU Page 10


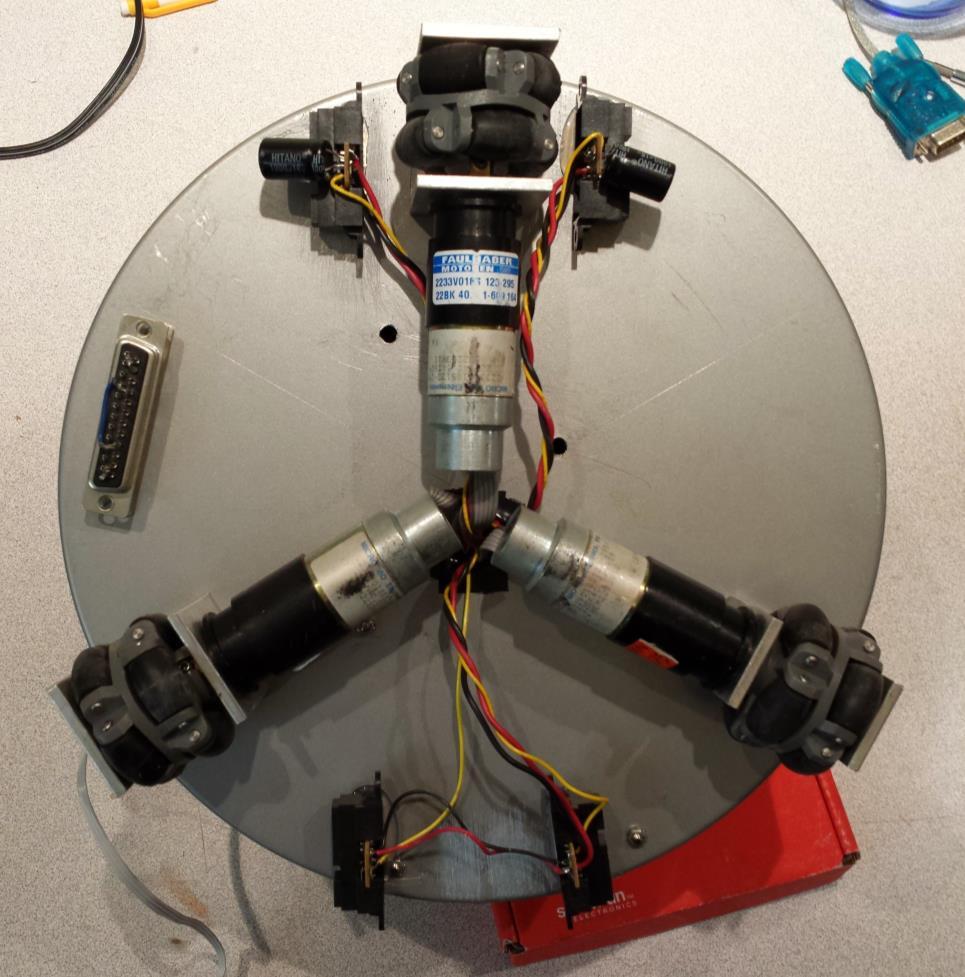
11 I decided it would be better to enclose the batteries and electronics in a metal box to protect them as well as to protect anyone touching the robot. Figure 9 Final mechanical assembly Figure 10Final design motor controller, CPU and batteries Page 11

12 Figure 11Final design underside The final design incorporates two aluminum trays designed for baking cakes. These trays are just the right size to hold the battery packs, the motor controller PCB, the processor PBC, and the LCD module with enough extra room for a radio and gyroscope which will be added in a later project. In order to follow walls without touching them, four Sharp GP 2D infrared range sensors were added. These sensors use reflected light to measure the distance to objects. The GP 2D120 sensor has a sensing range of from 4cm to 30cm which is ideal for this application. The GP 2D120 measures the distance to any objects in front of it and reports the distance as an analog value 20 times per second. Four analog input channels on the Motorola MC68332 were used to read these analog values and convert them into numbers used as a distance estimate in the software. The following image shows the location of the sensors facing to the left and right. Two sensors are used per side so that the robot can align itself parallel to the wall in order to travel straight down the hallway. Page 12
13 Page 13
14 Rules: To understand the rules, regulations and goals of the Trinity College Fire Fighting competition. The model house layout is as follows: Operation: Once turned on, the robot must be autonomous: self-controlled without any human intervention. Fire-fighting robots must not be manually controlled. A robot may bump into or touch the walls of the arena as it travels, but it cannot mark, dislodge, or damage the walls in doing so. The robot must not leave anything behind as it travels through the arena. It must not make any marks on the floor of the arena that aid in navigation as it travels. Trippy is an autonomous robot and the only user interaction is pressing the start pushbutton. The radio link is only used for debugging and tuning operations and is not used during the competition. Page 14

15 Dimensions: The robot must fit in a Bounding Box with a base 31 x 31 cm square and 27 cm high. If the robot has feelers to sense an object or wall, the feelers will be counted as part of the robot s total dimensions. Trippy fits within this bounding box as show in the photographs below. Page 15

16 Fires: For obvious reasons of safety and economy, fires will be simulated by small candle flames. The candle flame will be from 15 cm to 20 cm above the nominal floor level. The candle thickness normally will be between 2 cm and 3 cm. The exact height and size of the flame will change throughout the contest depending upon the condition of candle and its surroundings. The robot is required to find the candle no matter what the size of the flame is at that particular moment. Trippy has an ultraviolet light detector specifically designed to detect fire. From the C10423 data sheet: The Hamamatsu C10423 is a compact power supply and signal processing circuit developed to drive the high-sensitivity UV sensor "UV TRON R9454". Combining the C10423 with a high-sensitivity "UV TRON R9454 for use as a flame detector yields sensitivity capable of detecting the flame from a cigarette lighter (flame length 25 mm) even at distances up to 5 meters away. This is an ideal sensor for this application for several reasons. It requires only low voltage DC which is already available on the robot, so no additional power supplies will need to be constructed and tested. It is a complete sensor system which automatically rejects background signals such as cosmic rays, solar UV rays, etc. Page 16

17 Using this compact complete sensor system reduces the effort required to accurately detect the candle flame. Extinguishing the Candle: The robot must, in the opinion of the Judges, have found the candle before it attempts to put it out. For example, the robot cannot just flood the arena with CO2 thereby putting the flame out by accident. The robot must not use any destructive or dangerous methods to put out the candle. The robot may extinguish the candle by blowing air or other oxygen-bearing gas. The robot must come within 30 cm of the candle before it attempts to extinguish the flame. There will be a white 30 cm radius solid circle (or circle segment, if the candle is near a wall) on the floor around the candle, and the candle will be placed in the center of the circle. The robot must have some part of its body over the circle before it extinguishes the candle flame. Trippy has a DC powered front facing fan to extinguish the candle. This fan should be controlled with a relay to turn it on only when the candle has been detected, but I did not implement that at this time. In order to simulate the relay, I inserted a small piece of cardboard to block the fan inlet and removed it once the robot was in position to extinguish the candle. This would need to be changed to meet the rules of no human interaction. Page 17
18 Computer System: To determine a computer system that allows the robot to complete the competition's goals. Trippy uses a small microcontroller from Project #2 which is capable of running on low voltage DC and draws little current. It also is capable of running a small Real Time Operating System (RTOS). This ability makes it easy to implement software to perform the tasks required of the robot. Page 18
19 Robot: To build a working robot, specifically select electrical components, fabricate parts, write software and assembly, to meet the rules and complete goals of the Trinity College Fire Fighting competition. Most of the robot s mechanical system has been described above in the Design section. Sensors were added to measure the distance from the robot to wall sections both to avoid hitting the walls and to determine the location of the robot in the maze. A small DC fan was added to extinguish the candle. Page 19

20 Test: To test the robot s ability to complete task of the Trinity College Firefighting competition including a formal test plan. 1. The robot shall fit inside a 31cm x 31cm box 27cm high A cardboard box was constructed with a base 31cm by 31cm and a vertical flag 27cm tall. The robot was placed into the box and photographs were taken to document that no part of the robot extended beyond the allowed boundaries. 2. The robot shall not touch walls intentionally Do not get closer than 3cm to the wall. The robot was placed in a hallway consisting of two sheets of plywood paneling material 46 cm apart. The robot was commanded to align itself parallel to the walls and to center itself in the hallway. The robot was then commanded to drive straight for 91 cm to simulate driving down the maximally length wall in the simulated house. While the robot was moving down the hallway, it was observed and the distance to the walls never approached 2.54 cm. The robot was tested 10 times while visual observations were taken and the closest distance to the walls was estimated at approximately 5cm. The blue tape in the image is 2.54cm wide. Page 20
21 3. Robot shall be able to travel down hallway in various lighting conditions: 3.1. Near darkness 3.2. Extra light shining on wall While camera flash is being used. The testing procedure in test #2.1.1 above was run in various lighting conditions and the robot was able to maintain a 3cm separation from the walls under all conditions listed. 4. Robot shall find candle. The robot was placed in various orientations relative to a lit candle and was commanded to orient towards the candle. The robot rotated until it detected the candle and stopped. The candle was placed either 10cm or 30cm away from the robot and the robot detected the candle and stopped each time. The candle was extinguished and the robot was commanded to find the candle. The robot was unable to detect the candle when it was not lit. 5. Robot shall extinguish candle. Since the robot does not have an on/off control for the DC fan, the fan blows the candle out while the robot is attempting to detect the candle and approach it. In order to test if the robot could detect and approach the candle if its fan was not running, I manually placed a piece of cardboard on the inlet side of the DC fan thus blocking airflow and allowing the robot to detect and approach the candle. The robot was commanded to approach the candle and extinguish it using the DC fan. Since the robot does not have a downward looking brightness detector, it was commanded to move 10cm and stop after detecting the candle. It then halted and I manually removed the cardboard from the inlet side of the fan. On all tests, the robot was able to extinguish the candle. Conclusions: The robot was able to perform all the actions required to compete in the 2001 Trinity firefighting contest individually, however these actions were not combined into a fully functioning robot. Several things would need to be enhanced in order to compete: A downward looking line detector would need to be added to detect when the robot was near the candle. A relay or other electrical device would need to be added to turn the DC Fan on only when the robot was attempting to extinguish the candle. Page 21
22 A full-size room would need to be constructed and the robot tested to insure it could correctly navigate the room and find the candle in all rooms without contacting the house walls. Page 22
*Contest and Rules Adapted and/or cited from the 2007 Trinity College Home Firefighting Robot Contest
 Firefighting Mobile Robot Contest (R&D Project)* ITEC 467, Mobile Robotics Dr. John Wright Department of Applied Engineering, Safety & Technology Millersville University *Contest and Rules Adapted and/or
Firefighting Mobile Robot Contest (R&D Project)* ITEC 467, Mobile Robotics Dr. John Wright Department of Applied Engineering, Safety & Technology Millersville University *Contest and Rules Adapted and/or
Fire Fighting. Objective. Robot. Fire Fighting. Name of Event: Robots per Team: 1
 Fire Fighting Name of Event: Robots per Team: 1 No. of Players: Robot Control: Event Summary: Fire Fighting 2 players/team Autonomous This is an autonomous robot competition between 2 teams to extinguish
Fire Fighting Name of Event: Robots per Team: 1 No. of Players: Robot Control: Event Summary: Fire Fighting 2 players/team Autonomous This is an autonomous robot competition between 2 teams to extinguish
WCRG 2011 Sumo Robots Rev 0. Sumo Rules. (Mini & Full Size Sumo & LEGO)
") Object WCRG 2011 Sumo Robots Rev 0 Sumo Rules (Mini & Full Size Sumo & LEGO) The object is for your robot to push the other robot out of the sumo ring. Robot Specifications Robots must not intentionally
Object WCRG 2011 Sumo Robots Rev 0 Sumo Rules (Mini & Full Size Sumo & LEGO) The object is for your robot to push the other robot out of the sumo ring. Robot Specifications Robots must not intentionally
2017 Trinity College. Firefighting Robot Competition. Submitted by: Woojin Lee, EE. Rene Perez, EE
 2017 Trinity College Firefighting Robot Competition Submitted by: Woojin Lee, EE Rene Perez, EE EE495 Senior Project Seminar University of Evansville Advisor: Mark Randall December, 6, 2016 1 Table of
2017 Trinity College Firefighting Robot Competition Submitted by: Woojin Lee, EE Rene Perez, EE EE495 Senior Project Seminar University of Evansville Advisor: Mark Randall December, 6, 2016 1 Table of
Trinity Autonomous Firefighting Robot Contest
 Trinity Autonomous Firefighting Robot Contest University of Connecticut Senior Design Team Members: Katherine Drogalis, Electrical Engineering Zachariah Sutton, Electrical Engineering Chutian Zhang, Engineering
Trinity Autonomous Firefighting Robot Contest University of Connecticut Senior Design Team Members: Katherine Drogalis, Electrical Engineering Zachariah Sutton, Electrical Engineering Chutian Zhang, Engineering
Students will design, program, and build a robot vehicle to traverse a maze in 30 seconds without touching any sidewalls or going out of bounds.
 Overview Challenge Students will design, program, and build a robot vehicle to traverse a maze in 30 seconds without touching any sidewalls or going out of bounds. Materials Needed One of these sets: TETRIX
Overview Challenge Students will design, program, and build a robot vehicle to traverse a maze in 30 seconds without touching any sidewalls or going out of bounds. Materials Needed One of these sets: TETRIX
LDOR: Laser Directed Object Retrieving Robot. Final Report
 University of Florida Department of Electrical and Computer Engineering EEL 5666 Intelligent Machines Design Laboratory LDOR: Laser Directed Object Retrieving Robot Final Report 4/22/08 Mike Arms TA: Mike
University of Florida Department of Electrical and Computer Engineering EEL 5666 Intelligent Machines Design Laboratory LDOR: Laser Directed Object Retrieving Robot Final Report 4/22/08 Mike Arms TA: Mike
Positive Promotion: Use the FIRST and FTC logos in a manner that is positive and promotes FIRST.
 You have incredibly creative opportunities in terms of designing your own identity. There are many examples of how teams brand their efforts with websites, incredible team logos on robots, T shirts, hats,
You have incredibly creative opportunities in terms of designing your own identity. There are many examples of how teams brand their efforts with websites, incredible team logos on robots, T shirts, hats,
Automobile Prototype Servo Control
 IJIRST International Journal for Innovative Research in Science & Technology Volume 2 Issue 10 March 2016 ISSN (online): 2349-6010 Automobile Prototype Servo Control Mr. Linford William Fernandes Don Bosco
IJIRST International Journal for Innovative Research in Science & Technology Volume 2 Issue 10 March 2016 ISSN (online): 2349-6010 Automobile Prototype Servo Control Mr. Linford William Fernandes Don Bosco
C - Underground Exploration
 C - Underground Exploration You've discovered an underground system of tunnels under the planet surface, but they are too dangerous to explore! Let's get our robot to explore instead. 2017 courses.techcamp.org.uk/
C - Underground Exploration You've discovered an underground system of tunnels under the planet surface, but they are too dangerous to explore! Let's get our robot to explore instead. 2017 courses.techcamp.org.uk/
Ninth Annual SLIIT. Robotic Competition. Open UAV Race Competition Technical Specification. Organized By
 Ninth Annual SLIIT Robotic Competition Open UAV Race Competition Technical Specification Organized By Department of Electrical and Computer Engineering Faculty of Engineering Sri Lanka Institute of Information
Ninth Annual SLIIT Robotic Competition Open UAV Race Competition Technical Specification Organized By Department of Electrical and Computer Engineering Faculty of Engineering Sri Lanka Institute of Information
Autonomous Aerial Robot Tournament KISS Institute for Practical Robotics
 2018 Autonomous Aerial Robot Tournament KISS Institute for Practical Robotics Document Version 1.1 Table of Contents KIPR / Botball / GCER Sponsors... 3 Change Log... 4 KIPR Autonomous Aerial Robot Tournament...
2018 Autonomous Aerial Robot Tournament KISS Institute for Practical Robotics Document Version 1.1 Table of Contents KIPR / Botball / GCER Sponsors... 3 Change Log... 4 KIPR Autonomous Aerial Robot Tournament...
TEAM AERO-I TEAM AERO-I JOURNAL PAPER DELHI TECHNOLOGICAL UNIVERSITY Journal paper for IARC 2014
 TEAM AERO-I TEAM AERO-I JOURNAL PAPER DELHI TECHNOLOGICAL UNIVERSITY DELHI TECHNOLOGICAL UNIVERSITY Journal paper for IARC 2014 2014 IARC ABSTRACT The paper gives prominence to the technical details of
TEAM AERO-I TEAM AERO-I JOURNAL PAPER DELHI TECHNOLOGICAL UNIVERSITY DELHI TECHNOLOGICAL UNIVERSITY Journal paper for IARC 2014 2014 IARC ABSTRACT The paper gives prominence to the technical details of
GPS System Design and Control Modeling. Chua Shyan Jin, Ronald. Assoc. Prof Gerard Leng. Aeronautical Engineering Group, NUS
 GPS System Design and Control Modeling Chua Shyan Jin, Ronald Assoc. Prof Gerard Leng Aeronautical Engineering Group, NUS Abstract A GPS system for the autonomous navigation and surveillance of an airship
GPS System Design and Control Modeling Chua Shyan Jin, Ronald Assoc. Prof Gerard Leng Aeronautical Engineering Group, NUS Abstract A GPS system for the autonomous navigation and surveillance of an airship
Specifications. Chapter Arenas Basic Arena Standard Arena
 Chapter 8 Specifications 8.1 Arenas The competition takes place in a square arena that simulates a kitchen. The arena is 2.5 m on each side, with a black floor and white walls that are 30 cm high. A Home
Chapter 8 Specifications 8.1 Arenas The competition takes place in a square arena that simulates a kitchen. The arena is 2.5 m on each side, with a black floor and white walls that are 30 cm high. A Home
The Candle Extinguisher ECE 445 Spring 2017 Group #46 TA: Dan Frei
 The Candle Extinguisher ECE 445 Spring 2017 Group #46 TA: Dan Frei Casey Labuda Aaron VanDeCasteele Matthew Nee Introduction Safely extinguish any candle Helps prevent fires Allows lifetime of candle to
The Candle Extinguisher ECE 445 Spring 2017 Group #46 TA: Dan Frei Casey Labuda Aaron VanDeCasteele Matthew Nee Introduction Safely extinguish any candle Helps prevent fires Allows lifetime of candle to
Nebraska 4-H Robotics and GPS/GIS and SPIRIT Robotics Projects
 Name: Club or School: Robots Knowledge Survey (Pre) Multiple Choice: For each of the following questions, circle the letter of the answer that best answers the question. 1. A robot must be in order to
Name: Club or School: Robots Knowledge Survey (Pre) Multiple Choice: For each of the following questions, circle the letter of the answer that best answers the question. 1. A robot must be in order to
UNIT1. Keywords page 13-14
 UNIT1 Keywords page 13-14 What is a Robot? A robot is a machine that can do the work of a human. Robots can be automatic, or they can be computer-controlled. Robots are a part of everyday life. Most robots
UNIT1 Keywords page 13-14 What is a Robot? A robot is a machine that can do the work of a human. Robots can be automatic, or they can be computer-controlled. Robots are a part of everyday life. Most robots
Roborodentia Robot: Tektronix. Sean Yap Advisor: John Seng California Polytechnic State University, San Luis Obispo June 8th, 2016
 Roborodentia Robot: Tektronix Sean Yap Advisor: John Seng California Polytechnic State University, San Luis Obispo June 8th, 2016 Table of Contents Introduction... 2 Problem Statement... 2 Software...
Roborodentia Robot: Tektronix Sean Yap Advisor: John Seng California Polytechnic State University, San Luis Obispo June 8th, 2016 Table of Contents Introduction... 2 Problem Statement... 2 Software...
PCB & Circuit Designing (Summer Training Program) 6 Weeks/ 45 Days PRESENTED BY
 6 Weeks/ 45 Days PRESENTED BY") PCB & Circuit Designing (Summer Training Program) 6 Weeks/ 45 Days PRESENTED BY RoboSpecies Technologies Pvt. Ltd. Office: D-66, First Floor, Sector- 07, Noida, UP Contact us: Email: stp@robospecies.com
PCB & Circuit Designing (Summer Training Program) 6 Weeks/ 45 Days PRESENTED BY RoboSpecies Technologies Pvt. Ltd. Office: D-66, First Floor, Sector- 07, Noida, UP Contact us: Email: stp@robospecies.com
Mechatronics Engineering and Automation Faculty of Engineering, Ain Shams University MCT-151, Spring 2015 Lab-4: Electric Actuators
 Mechatronics Engineering and Automation Faculty of Engineering, Ain Shams University MCT-151, Spring 2015 Lab-4: Electric Actuators Ahmed Okasha, Assistant Lecturer okasha1st@gmail.com Objective Have a
Mechatronics Engineering and Automation Faculty of Engineering, Ain Shams University MCT-151, Spring 2015 Lab-4: Electric Actuators Ahmed Okasha, Assistant Lecturer okasha1st@gmail.com Objective Have a
Gael Force FRC Team 126
 Gael Force FRC Team 126 2018 FIRST Robotics Competition 2018 Robot Information and Specs Judges Information Packet Gael Force is proof that one team from a small town can have an incredible impact on many
Gael Force FRC Team 126 2018 FIRST Robotics Competition 2018 Robot Information and Specs Judges Information Packet Gael Force is proof that one team from a small town can have an incredible impact on many
Height Limited Switch
 Height Limited Switch Manual version: 1.0 Content Introduction...3 How it works...3 Key features...3 Hardware...4 Motor cut-off settings...4 Specification...4 Using the RC HLS #1 module...5 Powering the
Height Limited Switch Manual version: 1.0 Content Introduction...3 How it works...3 Key features...3 Hardware...4 Motor cut-off settings...4 Specification...4 Using the RC HLS #1 module...5 Powering the
2012 Mechatronics Competition: Capture the Flag
 2012 Mechatronics Competition: Capture the Flag Overview The mechatronics competition will be a capture the flag game between two alliances of three robots each. The goal is to be the first alliance to
2012 Mechatronics Competition: Capture the Flag Overview The mechatronics competition will be a capture the flag game between two alliances of three robots each. The goal is to be the first alliance to
Robofest 2016 BottleSumo
 Robofest 2016 BottleSumo 2016 Kick-off version 12-4-15, V1.1 The Bottle will be placed on this line (Figure 1) An example of BottleSumo Game Initial Configuration, Junior Division 21.6cm (8.5 ) 8 cm 3.8
Robofest 2016 BottleSumo 2016 Kick-off version 12-4-15, V1.1 The Bottle will be placed on this line (Figure 1) An example of BottleSumo Game Initial Configuration, Junior Division 21.6cm (8.5 ) 8 cm 3.8
KING OF THE HILL CHALLENGE RULES
 KING OF THE HILL CHALLENGE RULES Last Revised: May 19 th, 2015 Table of Contents 1.0 KING of the HILL CHALLENGE... 2 2.0 CHALLENGE RULES... 2 3.0 JUDGING and SCORING... 3 4.0 KING of the HILL DIAGRAM...
KING OF THE HILL CHALLENGE RULES Last Revised: May 19 th, 2015 Table of Contents 1.0 KING of the HILL CHALLENGE... 2 2.0 CHALLENGE RULES... 2 3.0 JUDGING and SCORING... 3 4.0 KING of the HILL DIAGRAM...
Quantizer step: volts Input Voltage [V]
![Quantizer step: volts Input Voltage [V]](/thumbs/96/126541381.jpg "Quantizer step: volts Input Voltage [V]") EE 101 Fall 2008 Date: Lab Section # Lab #8 Name: A/D Converter and ECEbot Power Abstract Partner: Autonomous robots need to have a means to sense the world around them. For example, the bumper switches
EE 101 Fall 2008 Date: Lab Section # Lab #8 Name: A/D Converter and ECEbot Power Abstract Partner: Autonomous robots need to have a means to sense the world around them. For example, the bumper switches
Master Op-Doc/Test Plan
 Power Supply Master Op-Doc/Test Plan Define Engineering Specs Establish battery life Establish battery technology Establish battery size Establish number of batteries Establish weight of batteries Establish
Power Supply Master Op-Doc/Test Plan Define Engineering Specs Establish battery life Establish battery technology Establish battery size Establish number of batteries Establish weight of batteries Establish
Part of: Inquiry Science with Dartmouth
 Curriculum Guide Part of: Inquiry Science with Dartmouth Developed by: David Qian, MD/PhD Candidate Department of Biomedical Data Science Overview Using existing knowledge of computer science, students
Curriculum Guide Part of: Inquiry Science with Dartmouth Developed by: David Qian, MD/PhD Candidate Department of Biomedical Data Science Overview Using existing knowledge of computer science, students
2018 First Responders 4-H Robotics Challenge Page 1
 2018 First Responders 4-H Robotics Challenge Page 1 Contents 2018 First Responders 4-H Robotics Challenge... 3 1 Teams... 3 2 The Game... 3 2.1 Competition kit... 3 2.2 Field Mat... 3 2.3 Playing Field...
2018 First Responders 4-H Robotics Challenge Page 1 Contents 2018 First Responders 4-H Robotics Challenge... 3 1 Teams... 3 2 The Game... 3 2.1 Competition kit... 3 2.2 Field Mat... 3 2.3 Playing Field...
CLASSIFICATION CONTROL WIDTH LENGTH
 Sumobot Competition Robots per Event: Length of Event: Robot Weight Range: Robot Dimensions: Arena Specifications: Robot Control: Event Summary: Two each match 1 minute per match (max) Two robots compete
Sumobot Competition Robots per Event: Length of Event: Robot Weight Range: Robot Dimensions: Arena Specifications: Robot Control: Event Summary: Two each match 1 minute per match (max) Two robots compete
EEL5666C IMDL Spring 2006 Student: Andrew Joseph. *Alarm-o-bot*
 EEL5666C IMDL Spring 2006 Student: Andrew Joseph *Alarm-o-bot* TAs: Adam Barnett, Sara Keen Instructor: A.A. Arroyo Final Report April 25, 2006 Table of Contents Abstract 3 Executive Summary 3 Introduction
EEL5666C IMDL Spring 2006 Student: Andrew Joseph *Alarm-o-bot* TAs: Adam Barnett, Sara Keen Instructor: A.A. Arroyo Final Report April 25, 2006 Table of Contents Abstract 3 Executive Summary 3 Introduction
Activity 2 Wave the Flag. Student Guide. Activity Overview. Robotics Jargon. Materials Needed. Building the Robot
 Activity Overview In this activity, you will learn about pivot points and integrate a servo motor into your robot to create a pivot point capable of waving a flag. After building the robot, you will conduct
Activity Overview In this activity, you will learn about pivot points and integrate a servo motor into your robot to create a pivot point capable of waving a flag. After building the robot, you will conduct
Activity 2 Wave the Flag. Student Guide. Activity Overview. Robotics Jargon. Materials Needed. Building the Robot
 Activity Overview In this activity, you will learn about pivot points and integrate a servo motor into your robot to create a pivot point capable of waving a flag. After building the robot, you will conduct
Activity Overview In this activity, you will learn about pivot points and integrate a servo motor into your robot to create a pivot point capable of waving a flag. After building the robot, you will conduct
Vision Ques t. Vision Quest. Use the Vision Sensor to drive your robot in Vision Quest!
 Vision Ques t Vision Quest Use the Vision Sensor to drive your robot in Vision Quest! Seek Discover new hands-on builds and programming opportunities to further your understanding of a subject matter.
Vision Ques t Vision Quest Use the Vision Sensor to drive your robot in Vision Quest! Seek Discover new hands-on builds and programming opportunities to further your understanding of a subject matter.
Precision Range Sensing Free run operation uses a 2Hz filter, with. Stable and reliable range readings and
 HRLV-MaxSonar - EZ Series HRLV-MaxSonar - EZ Series High Resolution, Precision, Low Voltage Ultrasonic Range Finder MB1003, MB1013, MB1023, MB1033, MB10436 The HRLV-MaxSonar-EZ sensor line is the most
HRLV-MaxSonar - EZ Series HRLV-MaxSonar - EZ Series High Resolution, Precision, Low Voltage Ultrasonic Range Finder MB1003, MB1013, MB1023, MB1033, MB10436 The HRLV-MaxSonar-EZ sensor line is the most
Robotic Systems Challenge 2013
 Robotic Systems Challenge 2013 An engineering challenge for students in grades 6 12 April 27, 2013 Charles Commons Conference Center JHU Homewood Campus Sponsored by: Johns Hopkins University Laboratory
Robotic Systems Challenge 2013 An engineering challenge for students in grades 6 12 April 27, 2013 Charles Commons Conference Center JHU Homewood Campus Sponsored by: Johns Hopkins University Laboratory
Sumo-bot Competition Rules
 Sumo-bot Competition Rules Location: Guadalupe County Agricultural Extension Office, 210 Live Oak, Seguin, TX 78155 Date and Time: December 2, 2017 from 9-2 PM doors open at 9AM Check in and Inspections:
Sumo-bot Competition Rules Location: Guadalupe County Agricultural Extension Office, 210 Live Oak, Seguin, TX 78155 Date and Time: December 2, 2017 from 9-2 PM doors open at 9AM Check in and Inspections:
Here Comes the Sun. The Challenge
 Here Comes the Sun This activity requires ROBOLAB 2.0 or higher, the Infrared Transmitter and cable #9713, RCX #9709, elab sets #9680 and #9681. The Challenge Invent a car that finds the optimal light
Here Comes the Sun This activity requires ROBOLAB 2.0 or higher, the Infrared Transmitter and cable #9713, RCX #9709, elab sets #9680 and #9681. The Challenge Invent a car that finds the optimal light
Winter 2007/2008 Third Annual IEEE Lego Robot Competition Rules
 Welcome to the Third Annual IEEE Lego Robot Competition. In this document you will find the rules and regulations for the events for the Winter 2007/2008 competition. This competition will take place in
Welcome to the Third Annual IEEE Lego Robot Competition. In this document you will find the rules and regulations for the events for the Winter 2007/2008 competition. This competition will take place in
2015 Maryland State 4-H LEGO Robotic Challenge
 Trash Talk Utilizing Trash to Power the World 2015 Maryland State 4-H LEGO Robotic Challenge Through Trash Talk, 4-H members involved in robotics will create LEGO robots that complete tasks related to
Trash Talk Utilizing Trash to Power the World 2015 Maryland State 4-H LEGO Robotic Challenge Through Trash Talk, 4-H members involved in robotics will create LEGO robots that complete tasks related to
Contest Field Border Construction Manual
 Contest Field Border Construction Manual TABLE OF CONTENTS Section 1 Field Construction...3 Section 2 Bill of Materials 3 Section 3 Construction.. 4 Step 1 - Layout...4 Step 2 - Bottom...4 Step 3 1 st
Contest Field Border Construction Manual TABLE OF CONTENTS Section 1 Field Construction...3 Section 2 Bill of Materials 3 Section 3 Construction.. 4 Step 1 - Layout...4 Step 2 - Bottom...4 Step 3 1 st
TigreSAT 2010 &2011 June Monthly Report
 2010-2011 TigreSAT Monthly Progress Report EQUIS ADS 2010 PAYLOAD No changes have been done to the payload since it had passed all the tests, requirements and integration that are necessary for LSU HASP
2010-2011 TigreSAT Monthly Progress Report EQUIS ADS 2010 PAYLOAD No changes have been done to the payload since it had passed all the tests, requirements and integration that are necessary for LSU HASP
Embedded Systems & Robotics (Winter Training Program) 6 Weeks/45 Days
 6 Weeks/45 Days") Embedded Systems & Robotics (Winter Training Program) 6 Weeks/45 Days PRESENTED BY RoboSpecies Technologies Pvt. Ltd. Office: W-53G, Sector-11, Noida-201301, U.P. Contact us: Email: stp@robospecies.com
Embedded Systems & Robotics (Winter Training Program) 6 Weeks/45 Days PRESENTED BY RoboSpecies Technologies Pvt. Ltd. Office: W-53G, Sector-11, Noida-201301, U.P. Contact us: Email: stp@robospecies.com
Sioux CCM. Mechatronics Trophy assignment description. Nov 2017 v0.9 Page 1 of 13
 Sioux CCM Mechatronics Trophy 2018 assignment description Nov 2017 v0.9 Page 1 of 13 Index Index... 2 WIPE-OUT... 3 Assignment description... 3 Element descriptions... 4 Robot... 4 Brush... 5 Contest area...
Sioux CCM Mechatronics Trophy 2018 assignment description Nov 2017 v0.9 Page 1 of 13 Index Index... 2 WIPE-OUT... 3 Assignment description... 3 Element descriptions... 4 Robot... 4 Brush... 5 Contest area...
Warning: CHOKING HAZARD -Small Parts. Not for Children Under 9 yrs. Kit Recommended for Ages 12 and up.
 The Original Warning: CHOKING HAZARD -Small Parts. Not for Children Under 9 yrs. Kit Recommended for Ages 12 and up. Table of Contents Soldering.. 3 How the WASP Works.. 7 The Build...... 12 Troubleshooting......30
The Original Warning: CHOKING HAZARD -Small Parts. Not for Children Under 9 yrs. Kit Recommended for Ages 12 and up. Table of Contents Soldering.. 3 How the WASP Works.. 7 The Build...... 12 Troubleshooting......30
Mindstorms NXT. mindstorms.lego.com
 Mindstorms NXT mindstorms.lego.com A3B99RO Robots: course organization At the beginning of the semester the students are divided into small teams (2 to 3 students). Each team uses the basic set of the
Mindstorms NXT mindstorms.lego.com A3B99RO Robots: course organization At the beginning of the semester the students are divided into small teams (2 to 3 students). Each team uses the basic set of the
PCB & Circuit Designing (Summer Training Program 2014)
") (Summer Training Program 2014) PRESENTED BY In association with RoboSpecies Technologies Pvt. Ltd. Office: A-90, Lower Ground Floor, Sec- 4, Noida, UP Contact us: Email: stp@robospecies.com Website: www.robospecies.com
(Summer Training Program 2014) PRESENTED BY In association with RoboSpecies Technologies Pvt. Ltd. Office: A-90, Lower Ground Floor, Sec- 4, Noida, UP Contact us: Email: stp@robospecies.com Website: www.robospecies.com
Medb ot. Medbot. Learn about robot behaviors as you transport medicine in a hospital with Medbot!
 Medb ot Medbot Learn about robot behaviors as you transport medicine in a hospital with Medbot! Seek Discover new hands-on builds and programming opportunities to further your understanding of a subject
Medb ot Medbot Learn about robot behaviors as you transport medicine in a hospital with Medbot! Seek Discover new hands-on builds and programming opportunities to further your understanding of a subject
Nautical Autonomous System with Task Integration (Code name)
") Nautical Autonomous System with Task Integration (Code name) NASTI 10/6/11 Team NASTI: Senior Students: Terry Max Christy, Jeremy Borgman Advisors: Nick Schmidt, Dr. Gary Dempsey Introduction The Nautical
Nautical Autonomous System with Task Integration (Code name) NASTI 10/6/11 Team NASTI: Senior Students: Terry Max Christy, Jeremy Borgman Advisors: Nick Schmidt, Dr. Gary Dempsey Introduction The Nautical
Properties of two light sensors
 Properties of two light sensors Timo Paukku Dinnesen (timo@daimi.au.dk) University of Aarhus Aabogade 34 8200 Aarhus N, Denmark January 10, 2006 1 Introduction Many projects using the LEGO Mindstorms RCX
Properties of two light sensors Timo Paukku Dinnesen (timo@daimi.au.dk) University of Aarhus Aabogade 34 8200 Aarhus N, Denmark January 10, 2006 1 Introduction Many projects using the LEGO Mindstorms RCX
FIRST Robotics Control System
 2018/2019 FIRST Robotics Control System Team 236 1 (click on a component to go to its slide) 2 The Robot Powered solely by 12V battery RoboRIO- is the computer on the robot Controlled by Java code on the
2018/2019 FIRST Robotics Control System Team 236 1 (click on a component to go to its slide) 2 The Robot Powered solely by 12V battery RoboRIO- is the computer on the robot Controlled by Java code on the
Use and Copyright Microcontroller Motion Activity #1: Connecting and Testing the Servo Servo on Board of Education Rev. C Servo on Board of Education
 Chapter 4: Controlling Motion Presentation based on: "What's a Microcontroller?" By Andy Lindsay Parallax, Inc Presentation developed by: Martin A. Hebel Southern Illinois University Carbondale C ll College
Chapter 4: Controlling Motion Presentation based on: "What's a Microcontroller?" By Andy Lindsay Parallax, Inc Presentation developed by: Martin A. Hebel Southern Illinois University Carbondale C ll College
Western Kansas Lego Robotics Competition April 16, 2018 Fort Hays State University
 Western Kansas Lego Robotics Competition April 16, 2018 Fort Hays State University WELCOME FHSU is hosting our 12 th annual Lego robotics competition. The competition is open to all area middle school
Western Kansas Lego Robotics Competition April 16, 2018 Fort Hays State University WELCOME FHSU is hosting our 12 th annual Lego robotics competition. The competition is open to all area middle school
VEX Robotics Platform and ROBOTC Software. Introduction
 VEX Robotics Platform and ROBOTC Software Introduction VEX Robotics Platform: Testbed for Learning Programming VEX Structure Subsystem VEX Structure Subsystem forms the base of every robot Contains square
VEX Robotics Platform and ROBOTC Software Introduction VEX Robotics Platform: Testbed for Learning Programming VEX Structure Subsystem VEX Structure Subsystem forms the base of every robot Contains square
Mini Hexapodinno. 18-DOF Robot
 Mini Hexapodinno 18-DOF Robot Instruction Manual Version 1.11 Trademark Innovati,, and BASIC Commander, are registered trademarks of Innovati Inc. InnoBASIC and cmdbus are trademarks of Innovati Inc. Copyright
Mini Hexapodinno 18-DOF Robot Instruction Manual Version 1.11 Trademark Innovati,, and BASIC Commander, are registered trademarks of Innovati Inc. InnoBASIC and cmdbus are trademarks of Innovati Inc. Copyright
Small and easy to mount IP67 rated. distance to target 1 Weather station monitoring
 4-20HR-MaxSonar -WR/WRC Series High Resolution, Precision, IP67 Weather Resistant, Ultrasonic Range Finders MB7460, MB7469, MB7480, MB7489 5 The 4-20HR-MaxSonar-WR sensor line is a high performance ultrasonic
4-20HR-MaxSonar -WR/WRC Series High Resolution, Precision, IP67 Weather Resistant, Ultrasonic Range Finders MB7460, MB7469, MB7480, MB7489 5 The 4-20HR-MaxSonar-WR sensor line is a high performance ultrasonic
Robotics Contest Contact: Robin Schamber
 Robotics Contest Contact: Robin Schamber rschambe@uwyo.edu The Wyoming 4-H Robot Contest robotics contest is modeled after the National Robotics Challenge which began as the Society of Manufacturing Engineers
Robotics Contest Contact: Robin Schamber rschambe@uwyo.edu The Wyoming 4-H Robot Contest robotics contest is modeled after the National Robotics Challenge which began as the Society of Manufacturing Engineers
INSPECTION AND CORRECTION OF BELLHOUSING TO CRANKSHAFT ALIGNMENT
 INSPECTION AND CORRECTION OF BELLHOUSING TO CRANKSHAFT ALIGNMENT BACKGROUND Proper alignment of the transmission input shaft to the crankshaft centerline is required in order to achieve the best results
INSPECTION AND CORRECTION OF BELLHOUSING TO CRANKSHAFT ALIGNMENT BACKGROUND Proper alignment of the transmission input shaft to the crankshaft centerline is required in order to achieve the best results
Web-Based Mobile Robot Simulator
 Web-Based Mobile Robot Simulator From: AAAI Technical Report WS-99-15. Compilation copyright 1999, AAAI (www.aaai.org). All rights reserved. Dan Stormont Utah State University 9590 Old Main Hill Logan
Web-Based Mobile Robot Simulator From: AAAI Technical Report WS-99-15. Compilation copyright 1999, AAAI (www.aaai.org). All rights reserved. Dan Stormont Utah State University 9590 Old Main Hill Logan
GST BOCES. Regional Robotics Competition & Exhibition. May 29, :00 2:00. Wings of Eagles Discovery Center, Big Flats NY. Mission Mars Rover
 GST BOCES Regional Robotics Competition & Exhibition May 29, 2019 9:00 2:00 Wings of Eagles Discovery Center, Big Flats NY Mission Rover Revision: 10/15/18 contact: STEM@GSTBOCES.org Page: 1 Program Overview
GST BOCES Regional Robotics Competition & Exhibition May 29, 2019 9:00 2:00 Wings of Eagles Discovery Center, Big Flats NY Mission Rover Revision: 10/15/18 contact: STEM@GSTBOCES.org Page: 1 Program Overview
Visual Perception Based Behaviors for a Small Autonomous Mobile Robot
 Visual Perception Based Behaviors for a Small Autonomous Mobile Robot Scott Jantz and Keith L Doty Machine Intelligence Laboratory Mekatronix, Inc. Department of Electrical and Computer Engineering Gainesville,
Visual Perception Based Behaviors for a Small Autonomous Mobile Robot Scott Jantz and Keith L Doty Machine Intelligence Laboratory Mekatronix, Inc. Department of Electrical and Computer Engineering Gainesville,
For Experimenters and Educators
 For Experimenters and Educators ARobot (pronounced "A robot") is a computer controlled mobile robot designed for Experimenters and Educators. Ages 14 and up (younger with help) can enjoy unlimited experimentation
For Experimenters and Educators ARobot (pronounced "A robot") is a computer controlled mobile robot designed for Experimenters and Educators. Ages 14 and up (younger with help) can enjoy unlimited experimentation
EEL5666 Intelligent Machines Design Lab. Project Report
 EEL5666 Intelligent Machines Design Lab Project Report Instructor Dr. Arroyo & Dr. Schwartz TAs Adam & Sara 04/25/2006 Sharan Asundi Graduate Student Department of Mechanical and Aerospace Engineering
EEL5666 Intelligent Machines Design Lab Project Report Instructor Dr. Arroyo & Dr. Schwartz TAs Adam & Sara 04/25/2006 Sharan Asundi Graduate Student Department of Mechanical and Aerospace Engineering
Assembly Guide Robokits India
 Robotic Arm 5 DOF Assembly Guide Robokits India info@robokits.co.in Robokits World http://www.robokitsworld.com http://www.robokitsworld.com Page 1 Overview : 5 DOF Robotic Arm from Robokits is a robotic
Robotic Arm 5 DOF Assembly Guide Robokits India info@robokits.co.in Robokits World http://www.robokitsworld.com http://www.robokitsworld.com Page 1 Overview : 5 DOF Robotic Arm from Robokits is a robotic
Studuino Icon Programming Environment Guide
 Studuino Icon Programming Environment Guide Ver 0.9.6 4/17/2014 This manual introduces the Studuino Software environment. As the Studuino programming environment develops, these instructions may be edited
Studuino Icon Programming Environment Guide Ver 0.9.6 4/17/2014 This manual introduces the Studuino Software environment. As the Studuino programming environment develops, these instructions may be edited
MECHATRONICS IN A BOX
 MECHATRONICS IN A BOX A Complete Mechatronics Solution for the Classroom amtekcompany.com Contents Introduction Programming Arduino microcontrollers Motor Control Training Course Flowcode 8 Formula AllCode
MECHATRONICS IN A BOX A Complete Mechatronics Solution for the Classroom amtekcompany.com Contents Introduction Programming Arduino microcontrollers Motor Control Training Course Flowcode 8 Formula AllCode
This document will provide detailed specifications, BOM information, and assembly instructions for the Official Competition Field.
 This document will provide detailed specifications, BOM information, and assembly instructions for the Official Competition Field. Teams who do not need an official field should refer to the separate low-cost
This document will provide detailed specifications, BOM information, and assembly instructions for the Official Competition Field. Teams who do not need an official field should refer to the separate low-cost
Autonomous Stair Climbing Algorithm for a Small Four-Tracked Robot
 Autonomous Stair Climbing Algorithm for a Small Four-Tracked Robot Quy-Hung Vu, Byeong-Sang Kim, Jae-Bok Song Korea University 1 Anam-dong, Seongbuk-gu, Seoul, Korea vuquyhungbk@yahoo.com, lovidia@korea.ac.kr,
Autonomous Stair Climbing Algorithm for a Small Four-Tracked Robot Quy-Hung Vu, Byeong-Sang Kim, Jae-Bok Song Korea University 1 Anam-dong, Seongbuk-gu, Seoul, Korea vuquyhungbk@yahoo.com, lovidia@korea.ac.kr,
TIP READ THE MANUAL. Following taken from FIRST Tech Challenge Game Manual Part 1 Rev 1.2. ispacescience.org
 TIP READ THE MANUAL Following taken from 2015-2016 FIRST Tech Challenge Game Manual Part 1 Rev 1.2 Robot Rules Simplified: RG01 Robot must pass inspection Conduct self-inspection using checklist Have copy
TIP READ THE MANUAL Following taken from 2015-2016 FIRST Tech Challenge Game Manual Part 1 Rev 1.2 Robot Rules Simplified: RG01 Robot must pass inspection Conduct self-inspection using checklist Have copy
The light sensor, rotation sensor, and motors may all be monitored using the view function on the RCX.
 Review the following material on sensors. Discuss how you might use each of these sensors. When you have completed reading through this material, build a robot of your choosing that has 2 motors (connected
Review the following material on sensors. Discuss how you might use each of these sensors. When you have completed reading through this material, build a robot of your choosing that has 2 motors (connected
Non-holonomic Robotic Control Using the BasicX-24p Microcontroller
 Abstract Session IT 301-018 Non-holonomic Robotic Control Using the BasicX-24p Microcontroller John M. Kuperavage, CIT Multi-Dimensional Integration jkuperavage@mdiadvantage.com John R. Wright, Jr., Ph.D.,
Abstract Session IT 301-018 Non-holonomic Robotic Control Using the BasicX-24p Microcontroller John M. Kuperavage, CIT Multi-Dimensional Integration jkuperavage@mdiadvantage.com John R. Wright, Jr., Ph.D.,
PATH PLANNING OF LINE FOLLOWER ROBOT
 Proceedings of the 5th European DSP Education and Research Conference, 2012 PATH PLANNING OF LINE FOLLOWER ROBOT Mustafa Engin 1, Dilşad Engin 2 B8 1 Ege Technical and Business College, Department Electronics
Proceedings of the 5th European DSP Education and Research Conference, 2012 PATH PLANNING OF LINE FOLLOWER ROBOT Mustafa Engin 1, Dilşad Engin 2 B8 1 Ege Technical and Business College, Department Electronics
Energy Saving Module (HG-ESM-01)
") (HG-ESM-01) Product overview Hybrid sensor/module with PIR sensor and Ultrasonic Sensor on it. Solved the existing sudden light-off after a certain time problem. by adopting ultrasonic sensor and intelligent
(HG-ESM-01) Product overview Hybrid sensor/module with PIR sensor and Ultrasonic Sensor on it. Solved the existing sudden light-off after a certain time problem. by adopting ultrasonic sensor and intelligent
Critical Design Review
 1 Critical Design Review 2 Table Of Contents 1.0 Introduction 3 1.2 Purpose 4 1.3 Scope 5 1.4 Definitions and Acronyms 6 1.5 References 7 2.0 Overall Description 8 2.1 Product Perspective 9 2.2 Product
1 Critical Design Review 2 Table Of Contents 1.0 Introduction 3 1.2 Purpose 4 1.3 Scope 5 1.4 Definitions and Acronyms 6 1.5 References 7 2.0 Overall Description 8 2.1 Product Perspective 9 2.2 Product
The Robot Olympics: A competition for Tribot s and their humans
 The Robot Olympics: A Competition for Tribot s and their humans 1 The Robot Olympics: A competition for Tribot s and their humans Xinjian Mo Faculty of Computer Science Dalhousie University, Canada xmo@cs.dal.ca
The Robot Olympics: A Competition for Tribot s and their humans 1 The Robot Olympics: A competition for Tribot s and their humans Xinjian Mo Faculty of Computer Science Dalhousie University, Canada xmo@cs.dal.ca
Broadband Power Amplifier
 601L Broadband Power Amplifier HIGH RF VOLTAGES MAY BE PRESENT AT THE OUTPUT OF THIS UNIT. All operating personnel should use extreme caution in handling these voltages and be thoroughly familiar with
601L Broadband Power Amplifier HIGH RF VOLTAGES MAY BE PRESENT AT THE OUTPUT OF THIS UNIT. All operating personnel should use extreme caution in handling these voltages and be thoroughly familiar with
An Autonomous Self- Propelled Robot Designed for Obstacle Avoidance and Fire Fighting
 An Autonomous Self- Propelled Robot Designed for Obstacle Avoidance and Fire Fighting K. Prathyusha Assistant professor, Department of ECE, NRI Institute of Technology, Agiripalli Mandal, Krishna District,
An Autonomous Self- Propelled Robot Designed for Obstacle Avoidance and Fire Fighting K. Prathyusha Assistant professor, Department of ECE, NRI Institute of Technology, Agiripalli Mandal, Krishna District,
JHU Robotics Challenge 2015
 JHU Robotics Challenge 2015 An engineering competition for students in grades 6 12 May 2, 2015 Glass Pavilion JHU Homewood Campus Sponsored by: Johns Hopkins University Laboratory for Computational Sensing
JHU Robotics Challenge 2015 An engineering competition for students in grades 6 12 May 2, 2015 Glass Pavilion JHU Homewood Campus Sponsored by: Johns Hopkins University Laboratory for Computational Sensing
Lab 1: Testing and Measurement on the r-one
 Lab 1: Testing and Measurement on the r-one Note: This lab is not graded. However, we will discuss the results in class, and think just how embarrassing it will be for me to call on you and you don t have
Lab 1: Testing and Measurement on the r-one Note: This lab is not graded. However, we will discuss the results in class, and think just how embarrassing it will be for me to call on you and you don t have
2018 ATMAE Robot Rules February 28, 2018
 2018 ATMAE Robot Rules February 28, 2018 Outline: Robot Requirements Prize Opportunities Safety Requirements Tentative Event Schedule Defuse the Target Challenge (Robotic Competition #1) Time Penalties
2018 ATMAE Robot Rules February 28, 2018 Outline: Robot Requirements Prize Opportunities Safety Requirements Tentative Event Schedule Defuse the Target Challenge (Robotic Competition #1) Time Penalties
An Autonomous Firefighting Robot
 An Autonomous Firefighting Robot William Dubel Hector Gongora Kevin Bechtold Daisy Diaz Department of Electrical and Computer Engineering Florida International University, Miami, FL 33199 Abstract Firefighting
An Autonomous Firefighting Robot William Dubel Hector Gongora Kevin Bechtold Daisy Diaz Department of Electrical and Computer Engineering Florida International University, Miami, FL 33199 Abstract Firefighting
L E C T U R E R, E L E C T R I C A L A N D M I C R O E L E C T R O N I C E N G I N E E R I N G
 P R O F. S L A C K L E C T U R E R, E L E C T R I C A L A N D M I C R O E L E C T R O N I C E N G I N E E R I N G G B S E E E @ R I T. E D U B L D I N G 9, O F F I C E 0 9-3 1 8 9 ( 5 8 5 ) 4 7 5-5 1 0
P R O F. S L A C K L E C T U R E R, E L E C T R I C A L A N D M I C R O E L E C T R O N I C E N G I N E E R I N G G B S E E E @ R I T. E D U B L D I N G 9, O F F I C E 0 9-3 1 8 9 ( 5 8 5 ) 4 7 5-5 1 0
CURIE Academy, Summer 2014 Lab 2: Computer Engineering Software Perspective Sign-Off Sheet
 Lab : Computer Engineering Software Perspective Sign-Off Sheet NAME: NAME: DATE: Sign-Off Milestone TA Initials Part 1.A Part 1.B Part.A Part.B Part.C Part 3.A Part 3.B Part 3.C Test Simple Addition Program
Lab : Computer Engineering Software Perspective Sign-Off Sheet NAME: NAME: DATE: Sign-Off Milestone TA Initials Part 1.A Part 1.B Part.A Part.B Part.C Part 3.A Part 3.B Part 3.C Test Simple Addition Program
Robotics using Lego Mindstorms EV3 (Intermediate)
") Robotics using Lego Mindstorms EV3 (Intermediate) Facebook.com/roboticsgateway @roboticsgateway Robotics using EV3 Are we ready to go Roboticists? Does each group have at least one laptop? Do you have
Robotics using Lego Mindstorms EV3 (Intermediate) Facebook.com/roboticsgateway @roboticsgateway Robotics using EV3 Are we ready to go Roboticists? Does each group have at least one laptop? Do you have
A Lego-Based Soccer-Playing Robot Competition For Teaching Design
 Session 2620 A Lego-Based Soccer-Playing Robot Competition For Teaching Design Ronald A. Lessard Norwich University Abstract Course Objectives in the ME382 Instrumentation Laboratory at Norwich University
Session 2620 A Lego-Based Soccer-Playing Robot Competition For Teaching Design Ronald A. Lessard Norwich University Abstract Course Objectives in the ME382 Instrumentation Laboratory at Norwich University
MANUFACTURING OF SERVO MOTORS
 Profile No.: 11 NIC Code: 29109 MANUFACTURING OF SERVO MOTORS 1. INTRODUCTION: Servo motors (or servos) are self-contained electric devices that rotate or push parts of a machine with great precision.
Profile No.: 11 NIC Code: 29109 MANUFACTURING OF SERVO MOTORS 1. INTRODUCTION: Servo motors (or servos) are self-contained electric devices that rotate or push parts of a machine with great precision.
I.1 Smart Machines. Unit Overview:
 I Smart Machines I.1 Smart Machines Unit Overview: This unit introduces students to Sensors and Programming with VEX IQ. VEX IQ Sensors allow for autonomous and hybrid control of VEX IQ robots and other
I Smart Machines I.1 Smart Machines Unit Overview: This unit introduces students to Sensors and Programming with VEX IQ. VEX IQ Sensors allow for autonomous and hybrid control of VEX IQ robots and other
Mini-Sumo Tournament Rules
 Mini-Sumo Tournament Rules These rules are base upon those of Fuji Soft ABC, Inc. for All Japan Robot-Sumo Tournament. While aimed at more local/national tournaments they are intended to be compatible
Mini-Sumo Tournament Rules These rules are base upon those of Fuji Soft ABC, Inc. for All Japan Robot-Sumo Tournament. While aimed at more local/national tournaments they are intended to be compatible
WORLD ROBOT OLYMPIAD Advanced Robotics Challenge Game Description, Rules and Scoring SMART GREENHOUSE
 WORLD ROBOT OLYMPIAD 2019 Advanced Robotics Challenge Game Description, Rules and Scoring SMART GREENHOUSE Introduction Robotics is a wonderful platform for learning 21st century skills, solving robotic
WORLD ROBOT OLYMPIAD 2019 Advanced Robotics Challenge Game Description, Rules and Scoring SMART GREENHOUSE Introduction Robotics is a wonderful platform for learning 21st century skills, solving robotic
In this activity, you will program the BASIC Stamp to control the rotation of each of the Parallax pre-modified servos on the Boe-Bot.
 Week 3 - How servos work Testing the Servos Individually In this activity, you will program the BASIC Stamp to control the rotation of each of the Parallax pre-modified servos on the Boe-Bot. How Servos
Week 3 - How servos work Testing the Servos Individually In this activity, you will program the BASIC Stamp to control the rotation of each of the Parallax pre-modified servos on the Boe-Bot. How Servos
Cedarville University Little Blue
 Cedarville University Little Blue IGVC Robot Design Report June 2004 Team Members: Silas Gibbs Kenny Keslar Tim Linden Jonathan Struebel Faculty Advisor: Dr. Clint Kohl Table of Contents 1. Introduction...
Cedarville University Little Blue IGVC Robot Design Report June 2004 Team Members: Silas Gibbs Kenny Keslar Tim Linden Jonathan Struebel Faculty Advisor: Dr. Clint Kohl Table of Contents 1. Introduction...
A New Simulator for Botball Robots
 A New Simulator for Botball Robots Stephen Carlson Montgomery Blair High School (Lockheed Martin Exploring Post 10-0162) 1 Introduction A New Simulator for Botball Robots Simulation is important when designing
A New Simulator for Botball Robots Stephen Carlson Montgomery Blair High School (Lockheed Martin Exploring Post 10-0162) 1 Introduction A New Simulator for Botball Robots Simulation is important when designing
Building an autonomous light finder robot
 LinuxFocus article number 297 http://linuxfocus.org Building an autonomous light finder robot by Katja and Guido Socher About the authors: Katja is the
LinuxFocus article number 297 http://linuxfocus.org Building an autonomous light finder robot by Katja and Guido Socher About the authors: Katja is the
A vibration is one back-and-forth motion.
 Basic Skills Students who go to the park without mastering the following skills have difficulty completing the ride worksheets in the next section. To have a successful physics day experience at the amusement
Basic Skills Students who go to the park without mastering the following skills have difficulty completing the ride worksheets in the next section. To have a successful physics day experience at the amusement
Experiment 4.B. Position Control. ECEN 2270 Electronics Design Laboratory 1
 Experiment 4.B Position Control Electronics Design Laboratory 1 Procedures 4.B.1 4.B.2 4.B.3 4.B.4 Read Encoder with Arduino Position Control by Counting Encoder Pulses Demo Setup Extra Credit Electronics
Experiment 4.B Position Control Electronics Design Laboratory 1 Procedures 4.B.1 4.B.2 4.B.3 4.B.4 Read Encoder with Arduino Position Control by Counting Encoder Pulses Demo Setup Extra Credit Electronics
Sample Pages. Classroom Activities for the Busy Teacher: NXT. 2 nd Edition. Classroom Activities for the Busy Teacher: NXT -
 Classroom Activities for the Busy Teacher: NXT 2 nd Edition Table of Contents Chapter 1: Introduction... 1 Chapter 2: What is a robot?... 5 Chapter 3: Flowcharting... 11 Chapter 4: DomaBot Basics... 15
Classroom Activities for the Busy Teacher: NXT 2 nd Edition Table of Contents Chapter 1: Introduction... 1 Chapter 2: What is a robot?... 5 Chapter 3: Flowcharting... 11 Chapter 4: DomaBot Basics... 15
Pre-Activity Quiz. 2 feet forward in a straight line? 1. What is a design challenge? 2. How do you program a robot to move
 Maze Challenge Pre-Activity Quiz 1. What is a design challenge? 2. How do you program a robot to move 2 feet forward in a straight line? 2 Pre-Activity Quiz Answers 1. What is a design challenge? A design
Maze Challenge Pre-Activity Quiz 1. What is a design challenge? 2. How do you program a robot to move 2 feet forward in a straight line? 2 Pre-Activity Quiz Answers 1. What is a design challenge? A design
Rack Attack. EEL 5666: Intelligent Machines Design Laboratory, University of Florida, Drs. A. Antonio Arroyo and E. M.
 04/22/08 Student Name: Barry Solomon TAs : Adam Barnett Mike Pridgen Sara Keen Rack Attack EEL 5666: Intelligent Machines Design Laboratory, University of Florida, Drs. A. Antonio Arroyo and E. M. Schwartz,
04/22/08 Student Name: Barry Solomon TAs : Adam Barnett Mike Pridgen Sara Keen Rack Attack EEL 5666: Intelligent Machines Design Laboratory, University of Florida, Drs. A. Antonio Arroyo and E. M. Schwartz,
Main improvements are increased number of LEDs and therefore better temperature indication with one Celsius degree increments.
 LED Thermometer V2 (Fahrenheit/Celsius/±1 ) PART NO. 2244754 After completing this great starter kit, users will have a nice interactive LED thermometer. You will learn one principle how temperature can
LED Thermometer V2 (Fahrenheit/Celsius/±1 ) PART NO. 2244754 After completing this great starter kit, users will have a nice interactive LED thermometer. You will learn one principle how temperature can