Artificial Intelligence Planning and Decision Making
|
|
|
- Rachel Maude Collins
- 5 years ago
- Views:
Transcription
1 Artificial Intelligence Planning and Decision Making NXT robots co-operating in problem solving authors: Lior Russo, Nir Schwartz, Yakov Levy
2 Introduction: On today s reality the subject of artificial intelligence and machine decision making is being researched by many institutions across the world. in that research process there is use of robotics. In this project we will deal with the subject of robotics.robotics is the branch of technology that deals with the design, construction, operation and application of robots and computer systems for their control, sensory feedback, and information processing. Taking under consideration that robots help our lives every day, we would like to examine the ability to combine robots abilities to a bigger decision maker planner which will be able to operate all of the robots tasks in a synced, logical based manner. The work will be based on the Lego Mindstorms NXT robots. Lego Mindstorms NXT is a programmable robotics kit released by Lego in late July There are a few programing possibilities to work with Lego Mindstorms NXT for example NXT-G, C# with Microsoft Robotics Developer Studio, BricxCC, lejos NXJ etc. In our project we will work with the lejos NXJ. lejos NXJ is a high level open source language based on Java that uses custom firmware developed by the lejos team.
3 Motivation: Show that 3 individual robots with different abilities can work together to achieve a certain goal. Each robot has a different ability, all the robots must cooperate. The robots have only simple logic, they can perform only simple tasks as: Move Forward Rotate left/right Activate a sensor The actual logic is in a main server, the server communicates with all robots via Bluetooth. The server is the brain. The server knows at every single moment the state of the world: Where every robot is located The direction of every robot. Saves information that was discovered in the past, according to this information it decides what to do next, in other words: it decides which command has to be sent to each robot. Concrete Goal: Solve a maze. The maze contains: Free paths Free paths are tiles that the robots can go through Wall A permanent obstacle, The robots can t go through, this obstacle can t be removed. Balloon An obstacle. This type of obstacle can be removed.
4 Platform: Hardware: Mindstorm NXT Robots Communication: Bluetooth Software: Lejos framework for java: Lejos is a framework for java for working with NXT-Robots. The Lejos framework support communication with only 1 robot, we had to modify and recompile it to support multi-robot communication. The lejos framework can be downloaded from here: Robots Abilities Alice Vision Ability, Alice uses the NXT Ultra Sonic sensor, with this sensor she can tell whether a tile is a free tile or an obstacle. She can t classify whether it s a balloon or a wall. Bob Color Identification, Bob can tell the color of an object. With this information our planner can classify obstacles to balloons or walls. Black color for a wall and red for a balloon. Colin Popping motor. With this special motor colin can pop balloons. World Modulation Our world is module into a 8x8 board. Every tile can be: Unknown Is a tile that have not been explored yet Free Paths Wall Balloon In addition, every robot contains a location and direction. The direction can be one of the following: Up, Down, Left or Right
5 Algorithm: States: Initial State Initial state is the state that we start our run from. In other words our planner will start solving the maze from this point. Goal State is a state of a run that satisfies the goal State Space World module: we would like to module the real world into the program. therefore we ve created a a world state that is known by the Planner and a GUIModule which shows in which tile each robot stands and to what direction it face. the Planner is aware of the state of the world and reflects it to the GUI, in order for the Planner to be aware of the state of the world we had to overcome a few problems encountered due to the gap between the world with physical limitation to the world described by the desirable world of accurate actions.. problems: solutions: 1. The robots doesn t move straight when moving forward. 2. The robots doesn t turn in the exact angle requested in the task. 3. The sensors of the robots will work in certain range only.
6 The main solution to all of our problems was to mark each tile frame with black stripes. using the light sensors localized in front of each robot before the front wheels. the sensors will be apart of the moving and turning tasks of the robots. In each task the robots will align to the black stripe and by that will make sure they are located in the front end of the tile. This alignment will lead to straightening the robots to the direction of the next movement to perform and also will make sure the front color, ultrasonic sensors and pin motor will be close enough to the tile in front of the robot and will be able to perform the acquired task accurately enough to give the expected results. Tasks Our server can send tasks to our robots via Bluetooth, the tasks are one of the following: Move forward task o Pre Condition: The robot is not a in front of an obstacle, edge or unknown tile o Post Condition: The robot location will be changed according to his direction Rotate task o Pre Condition: None. o Post Condition: The robot direction will be changed. Vision Task o Pre Condition: The robot has Ultra Sonic Sensor, the robot is standing in front of unknown tile o Post condition: If the tile in front of the robot is an obstacle then the tile will be marked as unknown obstacle If the tile in front of the robot is a free tile then the tile will be marked as free Color identification Task o Pre Condition: The robot has a color sensor, the robot is standing in front of unknown obstacle o Post Condition: If the color sensor returns Black color the in front of the robot will be marked as a wall If the color sensor returns Red color the in front of the robot will be marked as a balloon Pop a balloon Task o Pre Condition: The robot has a pin motor and he is standing in front of a balloon o Post Condition: The tile in front of the robot changed from Balloon tile to Free tile Waiting Task (Tells the robot to rest for 0.5 second) o Pre condition: None. o Post Condition: None.

7 Algorithm - Planner Our server contains the world modulation as we described above. The server has an algorithm that decides which task to send to which robot at every moment, this algorithm is called Planner. At the beginning our planner gives the robots tasks in order to explore the world. For example, it will give Alice move tasks and vision tasks in order to explore every unknown tile. The planner will explore the world with the Right hand method : The planner will send Bob To unknown obstacle tiles and then gives him Color Identification task, this is in order to determine if the tile is a wall or a balloon. The planner will send Colin to Balloon tiles and then gives him Pop a balloon task, this is in order to clear the obstacle. If a part of the maze is totally explored, then the planner won t send robots to this part (Exploitation) Source Code Lejos lejos is a Java based replacement firmware for the Lego Mindstorms. We implemented our Maze Solver in java, we used the lejos library. Lejos library doesn t support more than 1 robot- Lejos sends instruction to the lego inner framework via NXTCommand class. The problem is that this class is a singletone, in lots of lejos classes we can find this line: private static final NXTCommand nxtcommand = NXTCommandConnector.getSingletonOpen(); In our case it won t work, we need multiple robots, hence, we need multiple NXTCommand instances. We changed the lejos library, we changed the NXTCommand declaration to: private NXTCommand nxtcommand = null; Every class that needs the NXTCommand, has it own NXTCommand, and we pass to him the NXTCommand in the constructor.
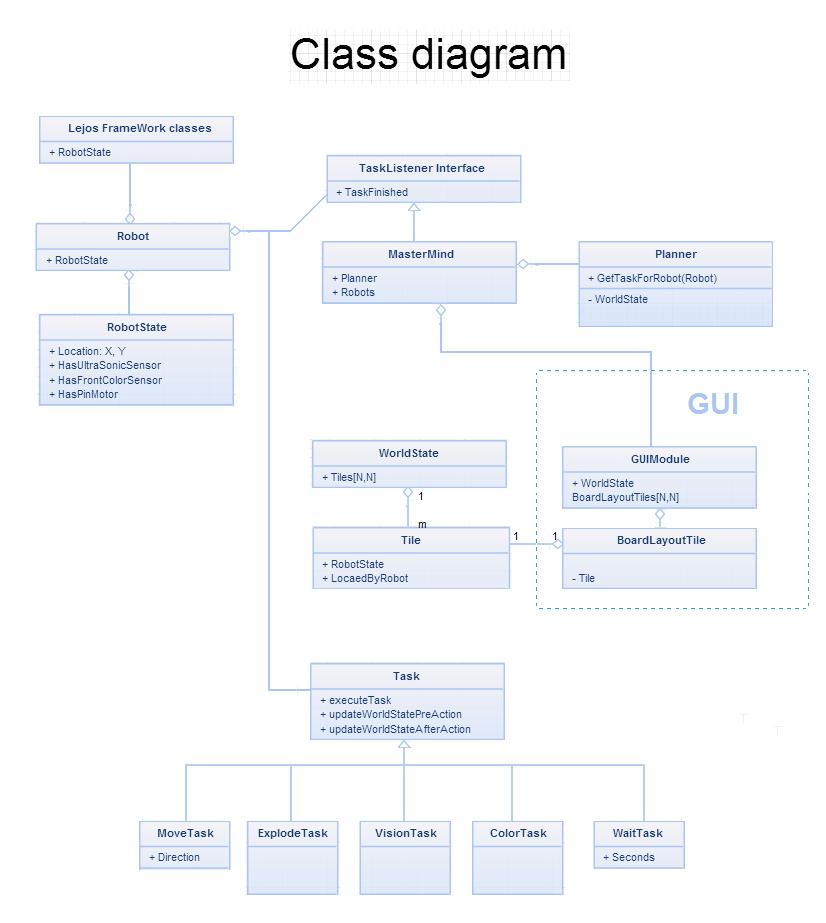
8 Classes Logic hanadling classes MasterMind - this is the main class. Here the main function is found. This class make all the process going on. At the beginning it initialize the: - Robots classes - World State - The planner. Every time a robot finish a task, The master mind is notified (Master mind implements the TaskListener interface), He asks from the planner for the next task for the specific robot and gives the robot that task, All of this is done in the function: taskfinished Planner - this is the Brain of the MazeSolver. The planner contains the gettaskforrobot this function is called every time a robot finishes his task and asks for his next task. The planner contains the world state. according to the WorldState and the robot abilities it decides which task to give him. Eventually the gettaskforrobot returns a Task class Task classes Task Task is an abstract class. A task represents a simple task like going forward, rotating and so on. Task should contain only technique implementations, not the logic. All Task in our project should inherit from this class. Every task contains the Robot associated to the task. public void updateworldstatepreaction(robot robot, WorldState state) This function is called before the task is executed public abstract void updateworldstateafteraction(robot robot, WorldState state) This function is called after the task is executed. The following classes inherit from Task: MoveTask Contains a direction and speed. For simplicity we have only 3 options: rotate left, rotate right and move forward. After every move Task we correct the robot direction by moving it until he meets the black line. 90% of the way we move with high speed, than we go on with a much lower speed until we meet the black line, for that we wrote the moveuntilmeetblackline function. updateworldstatepreaction Before we start to move we logically lock the tile we are attempting to move. updateworldstateafteraction - After we finish the move, we logically unlock the previous tile location. ExplodeTask Explode ballon task. When executed the robots will pin anything in front of him. updateworldstateafteraction We will mark the tile in front of the robot as unknow. We don t mark it as Free tile because first we want to check the balloon explosion succeeded. VisionTask Check if the Tile in front of the robot is free or not. updateworldstateafteraction if The tile is free then we marked the tile in front as free. Otherwise we marked it as unknown onstacle WaitingTask The robot waits 0.5 second. This task is given by the planner when there is nothing to give the robot at the moment. ColorTask This task is given to identify obstacle.
9 updateworldstateafteraction If red color returned, we mark the tile in front as a balloon obstacle, else we mark the tile in front as a wall obstacle World state classes (World modulation) Robot - The Robot class represents a robots. The robot class contains a RobotState class, A Task class (m_currenttask) and RobotState - The robot state class contains the state of the robot: The robot location, robot angle. It also contains boolean that indicated the robots abilities: HasUltraSonicSensor,HasFrontColorSensor,HasPinMotor WorldState- the world state class contains the modulation of the world. It contains 2 demotions array of Tiles Tile - tile represents a tile on the board. A tile contains the following members tiletype - which can be: unknown, free, wall, checkedwall or redballoned. (wall in other word is unknow obstacle ). RobotState - the robot that is inside the tile. Null means that the tile is empty LockedByRobot - The tile is locked by this robot. If null, that mean that nobody is locking this tile. LockedByRobot is different than RobotState, The robot doesn t need to be inside the tile inorder to lock it, for example if a robot moves from tile x to tile y, in the moment he starts his move he locks tile y. GUI classes GUIModule - the GUIModule responsible for showing us a graphical view of the world state, the GUIModule contains a 2 demotions array of BoardTileLayout. BoardTileLayout - responsible for showing a graphical view of signle tile
10
Mindstorms NXT. mindstorms.lego.com
 Mindstorms NXT mindstorms.lego.com A3B99RO Robots: course organization At the beginning of the semester the students are divided into small teams (2 to 3 students). Each team uses the basic set of the
Mindstorms NXT mindstorms.lego.com A3B99RO Robots: course organization At the beginning of the semester the students are divided into small teams (2 to 3 students). Each team uses the basic set of the
Pre-Activity Quiz. 2 feet forward in a straight line? 1. What is a design challenge? 2. How do you program a robot to move
 Maze Challenge Pre-Activity Quiz 1. What is a design challenge? 2. How do you program a robot to move 2 feet forward in a straight line? 2 Pre-Activity Quiz Answers 1. What is a design challenge? A design
Maze Challenge Pre-Activity Quiz 1. What is a design challenge? 2. How do you program a robot to move 2 feet forward in a straight line? 2 Pre-Activity Quiz Answers 1. What is a design challenge? A design
Learning serious knowledge while "playing"with robots
 6 th International Conference on Applied Informatics Eger, Hungary, January 27 31, 2004. Learning serious knowledge while "playing"with robots Zoltán Istenes Department of Software Technology and Methodology,
6 th International Conference on Applied Informatics Eger, Hungary, January 27 31, 2004. Learning serious knowledge while "playing"with robots Zoltán Istenes Department of Software Technology and Methodology,
Pre-Day Questionnaire
 LEGO Mindstorms Pre-Day Questionnaire Your Age? Please select your age from the options below: a) 11 b) 12 c) 13 d) 14 e) 15 or Older 0 0 0 0 0 11 12 13 14 15&or&Older Good at Problem Solving? Do you think
LEGO Mindstorms Pre-Day Questionnaire Your Age? Please select your age from the options below: a) 11 b) 12 c) 13 d) 14 e) 15 or Older 0 0 0 0 0 11 12 13 14 15&or&Older Good at Problem Solving? Do you think
An Introduction to Programming using the NXT Robot:
 An Introduction to Programming using the NXT Robot: exploring the LEGO MINDSTORMS Common palette. Student Workbook for independent learners and small groups The following tasks have been completed by:
An Introduction to Programming using the NXT Robot: exploring the LEGO MINDSTORMS Common palette. Student Workbook for independent learners and small groups The following tasks have been completed by:
Multi-Agent Robotics with GPS Navigation
 Jay Joshi Edison High School 50 Boulevard of the Eagles Edison, NJ 08817 Multi-Agent Robotics with GPS Navigation Abstract The GPS Navigation project is a multi-agent robotics project. A GPS Navigation
Jay Joshi Edison High School 50 Boulevard of the Eagles Edison, NJ 08817 Multi-Agent Robotics with GPS Navigation Abstract The GPS Navigation project is a multi-agent robotics project. A GPS Navigation
Inspiring Creative Fun Ysbrydoledig Creadigol Hwyl. LEGO Bowling Workbook
 Inspiring Creative Fun Ysbrydoledig Creadigol Hwyl LEGO Bowling Workbook Robots are devices, sometimes they run basic instructions via electric circuitry or on most occasions they can be programmable.
Inspiring Creative Fun Ysbrydoledig Creadigol Hwyl LEGO Bowling Workbook Robots are devices, sometimes they run basic instructions via electric circuitry or on most occasions they can be programmable.
A Rubik s Cube Solving Robot Using Basic Lego Mindstorms NXT kit
 A Rubik s Cube Solving Robot Using Basic Lego Mindstorms NXT kit Khushboo Tomar Department of Electronics and Communication Engineering, Amity University, Sector-125, Noida 201313 (U.P.) India tomar2khushboo@gmail.com
A Rubik s Cube Solving Robot Using Basic Lego Mindstorms NXT kit Khushboo Tomar Department of Electronics and Communication Engineering, Amity University, Sector-125, Noida 201313 (U.P.) India tomar2khushboo@gmail.com
How Do You Make a Program Wait?
 How Do You Make a Program Wait? How Do You Make a Program Wait? Pre-Quiz 1. What is an algorithm? 2. Can you think of a reason why it might be inconvenient to program your robot to always go a precise
How Do You Make a Program Wait? How Do You Make a Program Wait? Pre-Quiz 1. What is an algorithm? 2. Can you think of a reason why it might be inconvenient to program your robot to always go a precise
Closed-Loop Transportation Simulation. Outlines
 Closed-Loop Transportation Simulation Deyang Zhao Mentor: Unnati Ojha PI: Dr. Mo-Yuen Chow Aug. 4, 2010 Outlines 1 Project Backgrounds 2 Objectives 3 Hardware & Software 4 5 Conclusions 1 Project Background
Closed-Loop Transportation Simulation Deyang Zhao Mentor: Unnati Ojha PI: Dr. Mo-Yuen Chow Aug. 4, 2010 Outlines 1 Project Backgrounds 2 Objectives 3 Hardware & Software 4 5 Conclusions 1 Project Background
Robotics will be very important for the humanity in the next 10 years and this ebook is an effort to help in this way.
 1.- Introduction 1.1.- Goals Many developers around the world choose lejos, Java for Lego Mindstorm, as the main platform to develop robots with NXT Lego Mindstorm. I consider that this ebook will help
1.- Introduction 1.1.- Goals Many developers around the world choose lejos, Java for Lego Mindstorm, as the main platform to develop robots with NXT Lego Mindstorm. I consider that this ebook will help
Robot Programming Manual
 2 T Program Robot Programming Manual Two sensor, line-following robot design using the LEGO NXT Mindstorm kit. The RoboRAVE International is an annual robotics competition held in Albuquerque, New Mexico,
2 T Program Robot Programming Manual Two sensor, line-following robot design using the LEGO NXT Mindstorm kit. The RoboRAVE International is an annual robotics competition held in Albuquerque, New Mexico,
Automata Depository Model with Autonomous Robots
 Acta Cybernetica 19 (2010) 655 660. Automata Depository Model with Autonomous Robots Zoltán Szabó, Balázs Lájer, and Ágnes Werner-Stark Abstract One of the actual topics on robotis research in the recent
Acta Cybernetica 19 (2010) 655 660. Automata Depository Model with Autonomous Robots Zoltán Szabó, Balázs Lájer, and Ágnes Werner-Stark Abstract One of the actual topics on robotis research in the recent
Mobile Robot Navigation Contest for Undergraduate Design and K-12 Outreach
 Session 1520 Mobile Robot Navigation Contest for Undergraduate Design and K-12 Outreach Robert Avanzato Penn State Abington Abstract Penn State Abington has developed an autonomous mobile robotics competition
Session 1520 Mobile Robot Navigation Contest for Undergraduate Design and K-12 Outreach Robert Avanzato Penn State Abington Abstract Penn State Abington has developed an autonomous mobile robotics competition
Path Following and Obstacle Avoidance Fuzzy Controller for Mobile Indoor Robots
 Path Following and Obstacle Avoidance Fuzzy Controller for Mobile Indoor Robots Mousa AL-Akhras, Maha Saadeh, Emad AL Mashakbeh Computer Information Systems Department King Abdullah II School for Information
Path Following and Obstacle Avoidance Fuzzy Controller for Mobile Indoor Robots Mousa AL-Akhras, Maha Saadeh, Emad AL Mashakbeh Computer Information Systems Department King Abdullah II School for Information
Autonomous Obstacle Avoiding and Path Following Rover
 Volume 114 No. 9 2017, 271-281 ISSN: 1311-8080 (printed version); ISSN: 1314-3395 (on-line version) url: http://www.ijpam.eu Autonomous Obstacle Avoiding and Path Following Rover ijpam.eu Sandeep Polina
Volume 114 No. 9 2017, 271-281 ISSN: 1311-8080 (printed version); ISSN: 1314-3395 (on-line version) url: http://www.ijpam.eu Autonomous Obstacle Avoiding and Path Following Rover ijpam.eu Sandeep Polina
2.4 Sensorized robots
 66 Chap. 2 Robotics as learning object 2.4 Sensorized robots 2.4.1 Introduction The main objectives (competences or skills to be acquired) behind the problems presented in this section are: - The students
66 Chap. 2 Robotics as learning object 2.4 Sensorized robots 2.4.1 Introduction The main objectives (competences or skills to be acquired) behind the problems presented in this section are: - The students
Welcome to. NXT Basics. Presenter: Wael Hajj Ali With assistance of: Ammar Shehadeh - Souhaib Alzanki - Samer Abuthaher
 Welcome to NXT Basics Presenter: Wael Hajj Ali With assistance of: Ammar Shehadeh - Souhaib Alzanki - Samer Abuthaher Outline Have you met the Lizard? Introducing the Platform Lego Parts Motors Sensors
Welcome to NXT Basics Presenter: Wael Hajj Ali With assistance of: Ammar Shehadeh - Souhaib Alzanki - Samer Abuthaher Outline Have you met the Lizard? Introducing the Platform Lego Parts Motors Sensors
Afterschool Clubs & One Day Workshops Create. Code. Innovate.
 Afterschool Clubs & One Day Workshops Create. Code. Innovate. Kids & Teens Learning Tech Skills for Life. Fire Tech Camp has introduced me to much more about computers and coding than anything I have ever
Afterschool Clubs & One Day Workshops Create. Code. Innovate. Kids & Teens Learning Tech Skills for Life. Fire Tech Camp has introduced me to much more about computers and coding than anything I have ever
BEYOND TOYS. Wireless sensor extension pack. Tom Frissen s
 LEGO BEYOND TOYS Wireless sensor extension pack Tom Frissen s040915 t.e.l.n.frissen@student.tue.nl December 2008 Faculty of Industrial Design Eindhoven University of Technology 1 2 TABLE OF CONTENT CLASS
LEGO BEYOND TOYS Wireless sensor extension pack Tom Frissen s040915 t.e.l.n.frissen@student.tue.nl December 2008 Faculty of Industrial Design Eindhoven University of Technology 1 2 TABLE OF CONTENT CLASS
C - Underground Exploration
 C - Underground Exploration You've discovered an underground system of tunnels under the planet surface, but they are too dangerous to explore! Let's get our robot to explore instead. 2017 courses.techcamp.org.uk/
C - Underground Exploration You've discovered an underground system of tunnels under the planet surface, but they are too dangerous to explore! Let's get our robot to explore instead. 2017 courses.techcamp.org.uk/
Devastator Tank Mobile Platform with Edison SKU:ROB0125
 Devastator Tank Mobile Platform with Edison SKU:ROB0125 From Robot Wiki Contents 1 Introduction 2 Tutorial 2.1 Chapter 2: Run! Devastator! 2.2 Chapter 3: Expansion Modules 2.3 Chapter 4: Build The Devastator
Devastator Tank Mobile Platform with Edison SKU:ROB0125 From Robot Wiki Contents 1 Introduction 2 Tutorial 2.1 Chapter 2: Run! Devastator! 2.2 Chapter 3: Expansion Modules 2.3 Chapter 4: Build The Devastator
TU Graz Robotics Challenge 2017
 1 TU Graz Robotics Challenge W I S S E N T E C H N I K L E I D E N S C H A F T TU Graz Robotics Challenge 2017 www.robotics-challenge.ist.tugraz.at Kick-Off 14.03.2017 u www.tugraz.at 2 Overview Introduction
1 TU Graz Robotics Challenge W I S S E N T E C H N I K L E I D E N S C H A F T TU Graz Robotics Challenge 2017 www.robotics-challenge.ist.tugraz.at Kick-Off 14.03.2017 u www.tugraz.at 2 Overview Introduction
Multi-Robot Cooperative System For Object Detection
 Multi-Robot Cooperative System For Object Detection Duaa Abdel-Fattah Mehiar AL-Khawarizmi international collage Duaa.mehiar@kawarizmi.com Abstract- The present study proposes a multi-agent system based
Multi-Robot Cooperative System For Object Detection Duaa Abdel-Fattah Mehiar AL-Khawarizmi international collage Duaa.mehiar@kawarizmi.com Abstract- The present study proposes a multi-agent system based
RCJ Rescue B. RCJ Rescue B Primary Team Branchburg, NJ USA. Storming Robots in Branchburg, NJ, USA. SR-chitect / Storming Robots
 RCJ Rescue B RCJ Rescue B Primary Team Branchburg, NJ USA Storming Robots in Branchburg, NJ, USA 1 TEAM MEMBERS - BIOS 2 Andre Gou (captain) 13 years old Has done robotics for around 4-5 years Shall be
RCJ Rescue B RCJ Rescue B Primary Team Branchburg, NJ USA Storming Robots in Branchburg, NJ, USA 1 TEAM MEMBERS - BIOS 2 Andre Gou (captain) 13 years old Has done robotics for around 4-5 years Shall be
VOICE CONTROLLED ROBOT WITH REAL TIME BARRIER DETECTION AND AVERTING
 VOICE CONTROLLED ROBOT WITH REAL TIME BARRIER DETECTION AND AVERTING P.NARENDRA ILAYA PALLAVAN 1, S.HARISH 2, C.DHACHINAMOORTHI 3 1Assistant Professor, EIE Department, Bannari Amman Institute of Technology,
VOICE CONTROLLED ROBOT WITH REAL TIME BARRIER DETECTION AND AVERTING P.NARENDRA ILAYA PALLAVAN 1, S.HARISH 2, C.DHACHINAMOORTHI 3 1Assistant Professor, EIE Department, Bannari Amman Institute of Technology,
COSC343: Artificial Intelligence
 COSC343: Artificial Intelligence Lecture 2: Starting from scratch: robotics and embodied AI Alistair Knott Dept. of Computer Science, University of Otago Alistair Knott (Otago) COSC343 Lecture 2 1 / 29
COSC343: Artificial Intelligence Lecture 2: Starting from scratch: robotics and embodied AI Alistair Knott Dept. of Computer Science, University of Otago Alistair Knott (Otago) COSC343 Lecture 2 1 / 29
Developing Applications for the ROBOBO! robot
 Developing Applications for the ROBOBO! robot Gervasio Varela gervasio.varela@mytechia.com Outline ROBOBO!, the robot ROBOBO! Framework Developing native apps Developing ROS apps Let s Hack ROBOBO!, the
Developing Applications for the ROBOBO! robot Gervasio Varela gervasio.varela@mytechia.com Outline ROBOBO!, the robot ROBOBO! Framework Developing native apps Developing ROS apps Let s Hack ROBOBO!, the
Chapter 1. Robots and Programs
 Chapter 1 Robots and Programs 1 2 Chapter 1 Robots and Programs Introduction Without a program, a robot is just an assembly of electronic and mechanical components. This book shows you how to give it a
Chapter 1 Robots and Programs 1 2 Chapter 1 Robots and Programs Introduction Without a program, a robot is just an assembly of electronic and mechanical components. This book shows you how to give it a
RUNNYMEDE COLLEGE & TECHTALENTS
 RUNNYMEDE COLLEGE & TECHTALENTS Why teach Scratch? The first programming language as a tool for writing programs. The MIT Media Lab's amazing software for learning to program, Scratch is a visual, drag
RUNNYMEDE COLLEGE & TECHTALENTS Why teach Scratch? The first programming language as a tool for writing programs. The MIT Media Lab's amazing software for learning to program, Scratch is a visual, drag
A maze-solving educational robot with sensors simulated by a pen Thomas Levine and Jason Wright
 A maze-solving educational robot with sensors simulated by a pen Thomas Levine and Jason Wright Abstract We present an interface for programming a robot to navigate a maze through both text and tactile
A maze-solving educational robot with sensors simulated by a pen Thomas Levine and Jason Wright Abstract We present an interface for programming a robot to navigate a maze through both text and tactile
understanding sensors
 The LEGO MINDSTORMS EV3 set includes three types of sensors: Touch, Color, and Infrared. You can use these sensors to make your robot respond to its environment. For example, you can program your robot
The LEGO MINDSTORMS EV3 set includes three types of sensors: Touch, Color, and Infrared. You can use these sensors to make your robot respond to its environment. For example, you can program your robot
Week Lesson Assignment SD Technology Standards. SPA Handout. Handouts. Handouts/quiz. Video/handout. Handout. Video, handout.
 Week Lesson Assignment SD Technology Standards 1 Lesson 1: Intro to Robotics class Discuss goals of class & definition of a robot SPA Define engineering, programming and system. Define managing a project.
Week Lesson Assignment SD Technology Standards 1 Lesson 1: Intro to Robotics class Discuss goals of class & definition of a robot SPA Define engineering, programming and system. Define managing a project.
Q Learning Behavior on Autonomous Navigation of Physical Robot
 The 8th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI 211) Nov. 23-26, 211 in Songdo ConventiA, Incheon, Korea Q Learning Behavior on Autonomous Navigation of Physical Robot
The 8th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI 211) Nov. 23-26, 211 in Songdo ConventiA, Incheon, Korea Q Learning Behavior on Autonomous Navigation of Physical Robot
Robotic teaching for Malaysian gifted enrichment program
 Available online at www.sciencedirect.com Procedia Social and Behavioral Sciences 15 (2011) 2528 2532 WCES-2011 Robotic teaching for Malaysian gifted enrichment program Rizauddin Ramli a *, Melor Md Yunus
Available online at www.sciencedirect.com Procedia Social and Behavioral Sciences 15 (2011) 2528 2532 WCES-2011 Robotic teaching for Malaysian gifted enrichment program Rizauddin Ramli a *, Melor Md Yunus
Ev3 Robotics Programming 101
 Ev3 Robotics Programming 101 1. EV3 main components and use 2. Programming environment overview 3. Connecting your Robot wirelessly via bluetooth 4. Starting and understanding the EV3 programming environment
Ev3 Robotics Programming 101 1. EV3 main components and use 2. Programming environment overview 3. Connecting your Robot wirelessly via bluetooth 4. Starting and understanding the EV3 programming environment
Proseminar Roboter und Aktivmedien. Outline of today s lecture. Acknowledgments. Educational robots achievements and challenging
 Proseminar Roboter und Aktivmedien Educational robots achievements and challenging Lecturer Lecturer Houxiang Houxiang Zhang Zhang TAMS, TAMS, Department Department of of Informatics Informatics University
Proseminar Roboter und Aktivmedien Educational robots achievements and challenging Lecturer Lecturer Houxiang Houxiang Zhang Zhang TAMS, TAMS, Department Department of of Informatics Informatics University
The use of programmable robots in the education of programming
 Proceedings of the 7 th International Conference on Applied Informatics Eger, Hungary, January 28 31, 2007. Vol. 2. pp. 29 36. The use of programmable robots in the education of programming Zoltán Istenes
Proceedings of the 7 th International Conference on Applied Informatics Eger, Hungary, January 28 31, 2007. Vol. 2. pp. 29 36. The use of programmable robots in the education of programming Zoltán Istenes
DEVELOPMENT OF A ROBOID COMPONENT FOR PLAYER/STAGE ROBOT SIMULATOR
 Proceedings of IC-NIDC2009 DEVELOPMENT OF A ROBOID COMPONENT FOR PLAYER/STAGE ROBOT SIMULATOR Jun Won Lim 1, Sanghoon Lee 2,Il Hong Suh 1, and Kyung Jin Kim 3 1 Dept. Of Electronics and Computer Engineering,
Proceedings of IC-NIDC2009 DEVELOPMENT OF A ROBOID COMPONENT FOR PLAYER/STAGE ROBOT SIMULATOR Jun Won Lim 1, Sanghoon Lee 2,Il Hong Suh 1, and Kyung Jin Kim 3 1 Dept. Of Electronics and Computer Engineering,
Vision Ques t. Vision Quest. Use the Vision Sensor to drive your robot in Vision Quest!
 Vision Ques t Vision Quest Use the Vision Sensor to drive your robot in Vision Quest! Seek Discover new hands-on builds and programming opportunities to further your understanding of a subject matter.
Vision Ques t Vision Quest Use the Vision Sensor to drive your robot in Vision Quest! Seek Discover new hands-on builds and programming opportunities to further your understanding of a subject matter.
Final Report. Chazer Gator. by Siddharth Garg
 Final Report Chazer Gator by Siddharth Garg EEL 5666: Intelligent Machines Design Laboratory A. Antonio Arroyo, PhD Eric M. Schwartz, PhD Thomas Vermeer, Mike Pridgen No table of contents entries found.
Final Report Chazer Gator by Siddharth Garg EEL 5666: Intelligent Machines Design Laboratory A. Antonio Arroyo, PhD Eric M. Schwartz, PhD Thomas Vermeer, Mike Pridgen No table of contents entries found.
Automatic Headlights
 Automatic Headlights Design car features that will improve nighttime driving safety. Learning Objectives Students will: Explore the concept of Inputs and the way to control them Explore the concept of
Automatic Headlights Design car features that will improve nighttime driving safety. Learning Objectives Students will: Explore the concept of Inputs and the way to control them Explore the concept of
Erik Von Burg Mesa Public Schools Gifted and Talented Program Johnson Elementary School
 Erik Von Burg Mesa Public Schools Gifted and Talented Program Johnson Elementary School elvonbur@mpsaz.org Water Sabers (2008)* High Heelers (2009)* Helmeteers (2009)* Cyber Sleuths (2009)* LEGO All Stars
Erik Von Burg Mesa Public Schools Gifted and Talented Program Johnson Elementary School elvonbur@mpsaz.org Water Sabers (2008)* High Heelers (2009)* Helmeteers (2009)* Cyber Sleuths (2009)* LEGO All Stars
Robotics using Lego Mindstorms EV3 (Intermediate)
") Robotics using Lego Mindstorms EV3 (Intermediate) Facebook.com/roboticsgateway @roboticsgateway Robotics using EV3 Are we ready to go Roboticists? Does each group have at least one laptop? Do you have
Robotics using Lego Mindstorms EV3 (Intermediate) Facebook.com/roboticsgateway @roboticsgateway Robotics using EV3 Are we ready to go Roboticists? Does each group have at least one laptop? Do you have
Team Project: A Surveillant Robot System
 Team Project: A Surveillant Robot System SW & HW Test Plan Little Red Team Chankyu Park (Michel) Seonah Lee (Sarah) Qingyuan Shi (Lisa) Chengzhou Li JunMei Li Kai Lin Software Lists SW Lists for Surveillant
Team Project: A Surveillant Robot System SW & HW Test Plan Little Red Team Chankyu Park (Michel) Seonah Lee (Sarah) Qingyuan Shi (Lisa) Chengzhou Li JunMei Li Kai Lin Software Lists SW Lists for Surveillant
RAPID CONTROL PROTOTYPING FOR ELECTRIC DRIVES
 RAPID CONTROL PROTOTYPING FOR ELECTRIC DRIVES Lukáš Pohl Doctoral Degree Programme (2), FEEC BUT E-mail: xpohll01@stud.feec.vutbr.cz Supervised by: Petr Blaha E-mail: blahap@feec.vutbr.cz Abstract: This
RAPID CONTROL PROTOTYPING FOR ELECTRIC DRIVES Lukáš Pohl Doctoral Degree Programme (2), FEEC BUT E-mail: xpohll01@stud.feec.vutbr.cz Supervised by: Petr Blaha E-mail: blahap@feec.vutbr.cz Abstract: This
Open Source in Mobile Robotics
 Presentation for the course Il software libero Politecnico di Torino - IIT@Polito June 13, 2011 Introduction Mobile Robotics Applications Where are the problems? What about the solutions? Mobile robotics
Presentation for the course Il software libero Politecnico di Torino - IIT@Polito June 13, 2011 Introduction Mobile Robotics Applications Where are the problems? What about the solutions? Mobile robotics
How Does an Ultrasonic Sensor Work?
 How Does an Ultrasonic Sensor Work? Ultrasonic Sensor Pre-Quiz 1. How do humans sense distance? 2. How do bats sense distance? 3. Provide an example stimulus-sensorcoordinator-effector-response framework
How Does an Ultrasonic Sensor Work? Ultrasonic Sensor Pre-Quiz 1. How do humans sense distance? 2. How do bats sense distance? 3. Provide an example stimulus-sensorcoordinator-effector-response framework
Lego Nxt in Physical Etoys
 Lego Nxt in Physical Etoys Physical Etoys is a software Project which let us control, in real time, Lego Mindstorms Nxt s Robots using a Bluetooth connection. SqueakNxt is a module of the Physical Etoys
Lego Nxt in Physical Etoys Physical Etoys is a software Project which let us control, in real time, Lego Mindstorms Nxt s Robots using a Bluetooth connection. SqueakNxt is a module of the Physical Etoys
The Nomenclature and Geometry of LEGO
 The Nomenclature and Geometry of LEGO AN OVERVIEW OF LEGO EV3 MINDSTORMS ELEMENTS AND HOW THEY WORK TOGETHER UPDATED 9/27/2015 Required Stuff Please do not wander the building. Rest Rooms Location. Food
The Nomenclature and Geometry of LEGO AN OVERVIEW OF LEGO EV3 MINDSTORMS ELEMENTS AND HOW THEY WORK TOGETHER UPDATED 9/27/2015 Required Stuff Please do not wander the building. Rest Rooms Location. Food
TUTA/IOE/PCU All rights reserved. Printed in Nepal Fax: My First Humanoid Robot An Experience worth Sharing with Freshmen and Sophomore
 64 Journal of the Institute of the Engineering TUTA/IOE/PCU Journal of the Institute of Engineering, Vol. 8, No. 1, pp. 64 70 TUTA/IOE/PCU All rights reserved. Printed in Nepal Fax: 977-1-5525830 My First
64 Journal of the Institute of the Engineering TUTA/IOE/PCU Journal of the Institute of Engineering, Vol. 8, No. 1, pp. 64 70 TUTA/IOE/PCU All rights reserved. Printed in Nepal Fax: 977-1-5525830 My First
Automobile Prototype Servo Control
 IJIRST International Journal for Innovative Research in Science & Technology Volume 2 Issue 10 March 2016 ISSN (online): 2349-6010 Automobile Prototype Servo Control Mr. Linford William Fernandes Don Bosco
IJIRST International Journal for Innovative Research in Science & Technology Volume 2 Issue 10 March 2016 ISSN (online): 2349-6010 Automobile Prototype Servo Control Mr. Linford William Fernandes Don Bosco
Robot Olympics: Programming Robots to Perform Tasks in the Real World
 Robot Olympics: Programming Robots to Perform Tasks in the Real World Coranne Lipford Faculty of Computer Science Dalhousie University, Canada lipford@cs.dal.ca Raymond Walsh Faculty of Computer Science
Robot Olympics: Programming Robots to Perform Tasks in the Real World Coranne Lipford Faculty of Computer Science Dalhousie University, Canada lipford@cs.dal.ca Raymond Walsh Faculty of Computer Science
Guiding Visually Impaired People with NXT Robot through an Android Mobile Application
 Int. J. Com. Dig. Sys. 2, No. 3, 129-134 (2013) 129 International Journal of Computing and Digital Systems http://dx.doi.org/10.12785/ijcds/020304 Guiding Visually Impaired People with NXT Robot through
Int. J. Com. Dig. Sys. 2, No. 3, 129-134 (2013) 129 International Journal of Computing and Digital Systems http://dx.doi.org/10.12785/ijcds/020304 Guiding Visually Impaired People with NXT Robot through
VEX Robotics Platform and ROBOTC Software. Introduction
 VEX Robotics Platform and ROBOTC Software Introduction VEX Robotics Platform: Testbed for Learning Programming VEX Structure Subsystem VEX Structure Subsystem forms the base of every robot Contains square
VEX Robotics Platform and ROBOTC Software Introduction VEX Robotics Platform: Testbed for Learning Programming VEX Structure Subsystem VEX Structure Subsystem forms the base of every robot Contains square
acknowledgments...xv introduction...xvii 1 LEGO MINDSTORMS NXT 2.0: people, pieces, and potential getting started with the NXT 2.0 set...
 acknowledgments...xv introduction...xvii about this book...xvii part I: introduction to LEGO MINDSTORMS NXT 2.0...xviii part II: building...xviii part III: programming...xviii part IV: projects...xix companion
acknowledgments...xv introduction...xvii about this book...xvii part I: introduction to LEGO MINDSTORMS NXT 2.0...xviii part II: building...xviii part III: programming...xviii part IV: projects...xix companion
Boe-Bot robot manual
 Tallinn University of Technology Department of Computer Engineering Chair of Digital Systems Design Boe-Bot robot manual Priit Ruberg Erko Peterson Keijo Lass Tallinn 2016 Contents 1 Robot hardware description...3
Tallinn University of Technology Department of Computer Engineering Chair of Digital Systems Design Boe-Bot robot manual Priit Ruberg Erko Peterson Keijo Lass Tallinn 2016 Contents 1 Robot hardware description...3
Designing Toys That Come Alive: Curious Robots for Creative Play
 Designing Toys That Come Alive: Curious Robots for Creative Play Kathryn Merrick School of Information Technologies and Electrical Engineering University of New South Wales, Australian Defence Force Academy
Designing Toys That Come Alive: Curious Robots for Creative Play Kathryn Merrick School of Information Technologies and Electrical Engineering University of New South Wales, Australian Defence Force Academy
Maze Solving Algorithms for Micro Mouse
 Maze Solving Algorithms for Micro Mouse Surojit Guha Sonender Kumar surojitguha1989@gmail.com sonenderkumar@gmail.com Abstract The problem of micro-mouse is 30 years old but its importance in the field
Maze Solving Algorithms for Micro Mouse Surojit Guha Sonender Kumar surojitguha1989@gmail.com sonenderkumar@gmail.com Abstract The problem of micro-mouse is 30 years old but its importance in the field
Development of a MATLAB Data Acquisition and Control Toolbox for BASIC Stamp Microcontrollers
 Chapter 4 Development of a MATLAB Data Acquisition and Control Toolbox for BASIC Stamp Microcontrollers 4.1. Introduction Data acquisition and control boards, also known as DAC boards, are used in virtually
Chapter 4 Development of a MATLAB Data Acquisition and Control Toolbox for BASIC Stamp Microcontrollers 4.1. Introduction Data acquisition and control boards, also known as DAC boards, are used in virtually
I.1 Smart Machines. Unit Overview:
 I Smart Machines I.1 Smart Machines Unit Overview: This unit introduces students to Sensors and Programming with VEX IQ. VEX IQ Sensors allow for autonomous and hybrid control of VEX IQ robots and other
I Smart Machines I.1 Smart Machines Unit Overview: This unit introduces students to Sensors and Programming with VEX IQ. VEX IQ Sensors allow for autonomous and hybrid control of VEX IQ robots and other
Instructional Technology Center
 Partner Teacher Night March 2017 - Lego WeDo 2.0 What are Lego WeDos? WeDos are lego sets that come with a power source and a motor that allows students to create lego constructions that move like robots.
Partner Teacher Night March 2017 - Lego WeDo 2.0 What are Lego WeDos? WeDos are lego sets that come with a power source and a motor that allows students to create lego constructions that move like robots.
University of Toronto. Companion Robot Security. ECE1778 Winter Wei Hao Chang Apper Alexander Hong Programmer
 University of Toronto Companion ECE1778 Winter 2015 Creative Applications for Mobile Devices Wei Hao Chang Apper Alexander Hong Programmer April 9, 2015 Contents 1 Introduction 3 1.1 Problem......................................
University of Toronto Companion ECE1778 Winter 2015 Creative Applications for Mobile Devices Wei Hao Chang Apper Alexander Hong Programmer April 9, 2015 Contents 1 Introduction 3 1.1 Problem......................................
Introduction to the VEX Robotics Platform and ROBOTC Software
 Introduction to the VEX Robotics Platform and ROBOTC Software Computer Integrated Manufacturing 2013 Project Lead The Way, Inc. VEX Robotics Platform: Testbed for Learning Programming VEX Structure Subsystem
Introduction to the VEX Robotics Platform and ROBOTC Software Computer Integrated Manufacturing 2013 Project Lead The Way, Inc. VEX Robotics Platform: Testbed for Learning Programming VEX Structure Subsystem
Mars Rover: System Block Diagram. November 19, By: Dan Dunn Colin Shea Eric Spiller. Advisors: Dr. Huggins Dr. Malinowski Mr.
 Mars Rover: System Block Diagram November 19, 2002 By: Dan Dunn Colin Shea Eric Spiller Advisors: Dr. Huggins Dr. Malinowski Mr. Gutschlag System Block Diagram An overall system block diagram, shown in
Mars Rover: System Block Diagram November 19, 2002 By: Dan Dunn Colin Shea Eric Spiller Advisors: Dr. Huggins Dr. Malinowski Mr. Gutschlag System Block Diagram An overall system block diagram, shown in
On-demand printable robots
 On-demand printable robots Ankur Mehta Computer Science and Artificial Intelligence Laboratory Massachusetts Institute of Technology 3 Computational problem? 4 Physical problem? There s a robot for that.
On-demand printable robots Ankur Mehta Computer Science and Artificial Intelligence Laboratory Massachusetts Institute of Technology 3 Computational problem? 4 Physical problem? There s a robot for that.
Part of: Inquiry Science with Dartmouth
 Curriculum Guide Part of: Inquiry Science with Dartmouth Developed by: David Qian, MD/PhD Candidate Department of Biomedical Data Science Overview Using existing knowledge of computer science, students
Curriculum Guide Part of: Inquiry Science with Dartmouth Developed by: David Qian, MD/PhD Candidate Department of Biomedical Data Science Overview Using existing knowledge of computer science, students
Deriving Consistency from LEGOs
 Deriving Consistency from LEGOs What we have learned in 6 years of FLL and 7 years of Lego Robotics by Austin and Travis Schuh 1 2006 Austin and Travis Schuh, all rights reserved Objectives Basic Building
Deriving Consistency from LEGOs What we have learned in 6 years of FLL and 7 years of Lego Robotics by Austin and Travis Schuh 1 2006 Austin and Travis Schuh, all rights reserved Objectives Basic Building
Unit 4: Robot Chassis Construction
 Unit 4: Robot Chassis Construction Unit 4: Teacher s Guide Lesson Overview: Paul s robotic assistant needs to operate in a real environment. The size, scale, and capabilities of the TETRIX materials are
Unit 4: Robot Chassis Construction Unit 4: Teacher s Guide Lesson Overview: Paul s robotic assistant needs to operate in a real environment. The size, scale, and capabilities of the TETRIX materials are
Curriculum Activities for Driving Course Curriculum Sample 1
 Curriculum Activities for Driving Course Curriculum Sample 1 This sample is provided to give you some guidance in developing your own challenges. This mat is meant to serve as an intro to EV3 moves and
Curriculum Activities for Driving Course Curriculum Sample 1 This sample is provided to give you some guidance in developing your own challenges. This mat is meant to serve as an intro to EV3 moves and
Team Autono-Mo. Jacobia. Department of Computer Science and Engineering The University of Texas at Arlington
 Department of Computer Science and Engineering The University of Texas at Arlington Team Autono-Mo Jacobia Architecture Design Specification Team Members: Bill Butts Darius Salemizadeh Lance Storey Yunesh
Department of Computer Science and Engineering The University of Texas at Arlington Team Autono-Mo Jacobia Architecture Design Specification Team Members: Bill Butts Darius Salemizadeh Lance Storey Yunesh
An Algorithm for Dispersion of Search and Rescue Robots
 An Algorithm for Dispersion of Search and Rescue Robots Lava K.C. Augsburg College Minneapolis, MN 55454 kc@augsburg.edu Abstract When a disaster strikes, people can be trapped in areas which human rescue
An Algorithm for Dispersion of Search and Rescue Robots Lava K.C. Augsburg College Minneapolis, MN 55454 kc@augsburg.edu Abstract When a disaster strikes, people can be trapped in areas which human rescue
Advanced Mechatronics 1 st Mini Project. Remote Control Car. Jose Antonio De Gracia Gómez, Amartya Barua March, 25 th 2014
 Advanced Mechatronics 1 st Mini Project Remote Control Car Jose Antonio De Gracia Gómez, Amartya Barua March, 25 th 2014 Remote Control Car Manual Control with the remote and direction buttons Automatic
Advanced Mechatronics 1 st Mini Project Remote Control Car Jose Antonio De Gracia Gómez, Amartya Barua March, 25 th 2014 Remote Control Car Manual Control with the remote and direction buttons Automatic
Line Detection. Duration Minutes. Di culty Intermediate. Learning Objectives Students will:
 Line Detection Design ways to improve driving safety by helping to prevent drivers from falling asleep and causing an accident. Learning Objectives Students will: Explore the concept of the Loop Understand
Line Detection Design ways to improve driving safety by helping to prevent drivers from falling asleep and causing an accident. Learning Objectives Students will: Explore the concept of the Loop Understand
A Learning System for a Computational Science Related Topic
 Available online at www.sciencedirect.com Procedia Computer Science 9 (2012 ) 1763 1772 International Conference on Computational Science, ICCS 2012 A Learning System for a Computational Science Related
Available online at www.sciencedirect.com Procedia Computer Science 9 (2012 ) 1763 1772 International Conference on Computational Science, ICCS 2012 A Learning System for a Computational Science Related
Using Small Affordable Robots for Hybrid Simulation of Wireless Data Access Systems
 Using Small Affordable Robots for Hybrid Simulation of Wireless Data Access Systems Gorka Guerrero, Roberto Yus, and Eduardo Mena IIS Department, University of Zaragoza María de Luna 1, 50018, Zaragoza,
Using Small Affordable Robots for Hybrid Simulation of Wireless Data Access Systems Gorka Guerrero, Roberto Yus, and Eduardo Mena IIS Department, University of Zaragoza María de Luna 1, 50018, Zaragoza,
Robotics 2a. What Have We Got to Work With?
 Robotics 2a Introduction to the Lego Mindstorm EV3 What we re going to do in the session. Introduce you to the Lego Mindstorm Kits The Design Process Design Our Robot s Chassis What Have We Got to Work
Robotics 2a Introduction to the Lego Mindstorm EV3 What we re going to do in the session. Introduce you to the Lego Mindstorm Kits The Design Process Design Our Robot s Chassis What Have We Got to Work
ACTIVE LEARNING USING MECHATRONICS IN A FRESHMAN INFORMATION TECHNOLOGY COURSE
 ACTIVE LEARNING USING MECHATRONICS IN A FRESHMAN INFORMATION TECHNOLOGY COURSE Doug Wolfe 1, Karl Gossett 2, Peter D. Hanlon 3, and Curtis A. Carver Jr. 4 Session S1D Abstract This paper details efforts
ACTIVE LEARNING USING MECHATRONICS IN A FRESHMAN INFORMATION TECHNOLOGY COURSE Doug Wolfe 1, Karl Gossett 2, Peter D. Hanlon 3, and Curtis A. Carver Jr. 4 Session S1D Abstract This paper details efforts
After Performance Report Of the Robot
 After Performance Report Of the Robot Engineering 112 Spring 2007 Instructor: Dr. Ghada Salama By Mahmudul Alam Tareq Al Maaita Ismail El Ebiary Section- 502 Date: May 2, 2007 Introduction: The report
After Performance Report Of the Robot Engineering 112 Spring 2007 Instructor: Dr. Ghada Salama By Mahmudul Alam Tareq Al Maaita Ismail El Ebiary Section- 502 Date: May 2, 2007 Introduction: The report
Intelligent Robotics Assignments
 Intelligent Robotics Assignments Luís Paulo Reis Assignment#1 Oral Presentation about an Intelligent Robotic New Trend Groups: 1 to 3 students 8 15 Minutes Oral Presentation 15 20 Slides (including appropriate
Intelligent Robotics Assignments Luís Paulo Reis Assignment#1 Oral Presentation about an Intelligent Robotic New Trend Groups: 1 to 3 students 8 15 Minutes Oral Presentation 15 20 Slides (including appropriate
INTERACTIVE BUILDING BLOCK SYSTEMS
 INTERACTIVE BUILDING BLOCK SYSTEMS CONTENTS About UBTECH ROBOTICS CORP Toy s Revolution What is Jimu Robot What it Comes With 3 Step Learning Play Build Program Share Jimu Robot Available Kits Dream With
INTERACTIVE BUILDING BLOCK SYSTEMS CONTENTS About UBTECH ROBOTICS CORP Toy s Revolution What is Jimu Robot What it Comes With 3 Step Learning Play Build Program Share Jimu Robot Available Kits Dream With
Building Robots With Lego Mindstorms Nxt
 We have made it easy for you to find a PDF Ebooks without any digging. And by having access to our ebooks online or by storing it on your computer, you have convenient answers with building robots with
We have made it easy for you to find a PDF Ebooks without any digging. And by having access to our ebooks online or by storing it on your computer, you have convenient answers with building robots with
Undefined Obstacle Avoidance and Path Planning
 Paper ID #6116 Undefined Obstacle Avoidance and Path Planning Prof. Akram Hossain, Purdue University, Calumet (Tech) Akram Hossain is a professor in the department of Engineering Technology and director
Paper ID #6116 Undefined Obstacle Avoidance and Path Planning Prof. Akram Hossain, Purdue University, Calumet (Tech) Akram Hossain is a professor in the department of Engineering Technology and director
Robots in the Loop: Supporting an Incremental Simulation-based Design Process
 s in the Loop: Supporting an Incremental -based Design Process Xiaolin Hu Computer Science Department Georgia State University Atlanta, GA, USA xhu@cs.gsu.edu Abstract This paper presents the results of
s in the Loop: Supporting an Incremental -based Design Process Xiaolin Hu Computer Science Department Georgia State University Atlanta, GA, USA xhu@cs.gsu.edu Abstract This paper presents the results of
Unit 12: Artificial Intelligence CS 101, Fall 2018
 Unit 12: Artificial Intelligence CS 101, Fall 2018 Learning Objectives After completing this unit, you should be able to: Explain the difference between procedural and declarative knowledge. Describe the
Unit 12: Artificial Intelligence CS 101, Fall 2018 Learning Objectives After completing this unit, you should be able to: Explain the difference between procedural and declarative knowledge. Describe the
THE USE OF LEGO MINDSTORMS NXT ROBOTS IN THE TEACHING OF INTRODUCTORY JAVA PROGRAMMING TO UNDERGRADUATE STUDENTS
 THE USE OF LEGO MINDSTORMS NXT ROBOTS IN THE TEACHING OF INTRODUCTORY JAVA PROGRAMMING TO UNDERGRADUATE STUDENTS Elizabeth A. Gandy: University of Sunderland Department of Computing, Engineering & Technology,
THE USE OF LEGO MINDSTORMS NXT ROBOTS IN THE TEACHING OF INTRODUCTORY JAVA PROGRAMMING TO UNDERGRADUATE STUDENTS Elizabeth A. Gandy: University of Sunderland Department of Computing, Engineering & Technology,
Robot Gladiators: A Java Exercise with Artificial Intelligence
 Robot Gladiators: A Java Exercise with Artificial Intelligence David S. Yuen & Lowell A. Carmony Department of Mathematics & Computer Science Lake Forest College 555 N. Sheridan Road Lake Forest, IL 60045
Robot Gladiators: A Java Exercise with Artificial Intelligence David S. Yuen & Lowell A. Carmony Department of Mathematics & Computer Science Lake Forest College 555 N. Sheridan Road Lake Forest, IL 60045
Vishnu Nath. Usage of computer vision and humanoid robotics to create autonomous robots. (Ximea Currera RL04C Camera Kit)
") Vishnu Nath Usage of computer vision and humanoid robotics to create autonomous robots (Ximea Currera RL04C Camera Kit) Acknowledgements Firstly, I would like to thank Ivan Klimkovic of Ximea Corporation,
Vishnu Nath Usage of computer vision and humanoid robotics to create autonomous robots (Ximea Currera RL04C Camera Kit) Acknowledgements Firstly, I would like to thank Ivan Klimkovic of Ximea Corporation,
2013 RESEARCH EXPERIENCE FOR TEACHERS - ROBOTICS
 2013 RESEARCH EXPERIENCE FOR TEACHERS - ROBOTICS ELIZABETH FREEMAN JESSE BELL RET (Research Experiences for Teachers) Site on Networks, Electrical Engineering Department, and Institute of Applied Sciences,
2013 RESEARCH EXPERIENCE FOR TEACHERS - ROBOTICS ELIZABETH FREEMAN JESSE BELL RET (Research Experiences for Teachers) Site on Networks, Electrical Engineering Department, and Institute of Applied Sciences,
Smart-M3-Based Robot Interaction in Cyber-Physical Systems
 FRUCT 16, Oulu, Finland October 30, 2014 Smart-M3-Based Robot Interaction in Cyber-Physical Systems Nikolay Teslya *, Sergey Savosin * * St. Petersburg Institute for Informatics and Automation of the Russian
FRUCT 16, Oulu, Finland October 30, 2014 Smart-M3-Based Robot Interaction in Cyber-Physical Systems Nikolay Teslya *, Sergey Savosin * * St. Petersburg Institute for Informatics and Automation of the Russian
Team Description Paper
 Team Description Paper Sebastián Bejos, Fernanda Beltrán, Ivan Feliciano, Giovanni Guerrero, Moroni Silverio 1 Abstract We describe the design of the hardware and software components, as well as the algorithms
Team Description Paper Sebastián Bejos, Fernanda Beltrán, Ivan Feliciano, Giovanni Guerrero, Moroni Silverio 1 Abstract We describe the design of the hardware and software components, as well as the algorithms
Computational Crafting with Arduino. Christopher Michaud Marist School ECEP Programs, Georgia Tech
 Computational Crafting with Arduino Christopher Michaud Marist School ECEP Programs, Georgia Tech Introduction What do you want to learn and do today? Goals with Arduino / Computational Crafting Purpose
Computational Crafting with Arduino Christopher Michaud Marist School ECEP Programs, Georgia Tech Introduction What do you want to learn and do today? Goals with Arduino / Computational Crafting Purpose
Let There Be Light. Opening Files. Deleting National Technology and Science Press
 Let There Be Light 2 Better to light a candle than to curse the darkness. Chinese Proverb The Hello World program demonstrates only the output aspect of a computer program. Now let s write a program that
Let There Be Light 2 Better to light a candle than to curse the darkness. Chinese Proverb The Hello World program demonstrates only the output aspect of a computer program. Now let s write a program that
Activity Template. Subject Area(s): Science and Technology Activity Title: Header. Grade Level: 9-12 Time Required: Group Size:
: Science and Technology Activity Title: Header. Grade Level: 9-12 Time Required: Group Size:") Activity Template Subject Area(s): Science and Technology Activity Title: What s In a Name? Header Image 1 ADA Description: Picture of a rover with attached pen for writing while performing program. Caption:
Activity Template Subject Area(s): Science and Technology Activity Title: What s In a Name? Header Image 1 ADA Description: Picture of a rover with attached pen for writing while performing program. Caption:
Mobile Robot Platform for Improving Experience of Learning Programming Languages
 Journal of Automation and Control Engineering Vol. 2, No. 3, September 2014 Mobile Robot Platform for Improving Experience of Learning Programming Languages Jun Su Park and Artem Lenskiy The Department
Journal of Automation and Control Engineering Vol. 2, No. 3, September 2014 Mobile Robot Platform for Improving Experience of Learning Programming Languages Jun Su Park and Artem Lenskiy The Department
Escape From ENGINEERING ISLAND KU High School Design
 Escape From ENGINEERING ISLAND KU High School Design Lego Mindstorms October 25, 2016 Competition Summary Teams will need to design, build, and program a survival vehicle using a Lego Mindstorms EV3 or
Escape From ENGINEERING ISLAND KU High School Design Lego Mindstorms October 25, 2016 Competition Summary Teams will need to design, build, and program a survival vehicle using a Lego Mindstorms EV3 or
Introduction.
 Teaching Deliberative Navigation Using the LEGO RCX and Standard LEGO Components Gary R. Mayer *, Jerry B. Weinberg, Xudong Yu Department of Computer Science, School of Engineering Southern Illinois University
Teaching Deliberative Navigation Using the LEGO RCX and Standard LEGO Components Gary R. Mayer *, Jerry B. Weinberg, Xudong Yu Department of Computer Science, School of Engineering Southern Illinois University
Embedded Control Project -Iterative learning control for
 Embedded Control Project -Iterative learning control for Author : Axel Andersson Hariprasad Govindharajan Shahrzad Khodayari Project Guide : Alexander Medvedev Program : Embedded Systems and Engineering
Embedded Control Project -Iterative learning control for Author : Axel Andersson Hariprasad Govindharajan Shahrzad Khodayari Project Guide : Alexander Medvedev Program : Embedded Systems and Engineering
Wheeled Mobile Robot Obstacle Avoidance Using Compass and Ultrasonic
 Universal Journal of Control and Automation 6(1): 13-18, 2018 DOI: 10.13189/ujca.2018.060102 http://www.hrpub.org Wheeled Mobile Robot Obstacle Avoidance Using Compass and Ultrasonic Yousef Moh. Abueejela
Universal Journal of Control and Automation 6(1): 13-18, 2018 DOI: 10.13189/ujca.2018.060102 http://www.hrpub.org Wheeled Mobile Robot Obstacle Avoidance Using Compass and Ultrasonic Yousef Moh. Abueejela
Robotics Workshop. for Parents and Teachers. September 27, 2014 Wichita State University College of Engineering. Karen Reynolds
 Robotics Workshop for Parents and Teachers September 27, 2014 Wichita State University College of Engineering Steve Smith Christa McAuliffe Academy ssmith3@usd259.net Karen Reynolds Wichita State University
Robotics Workshop for Parents and Teachers September 27, 2014 Wichita State University College of Engineering Steve Smith Christa McAuliffe Academy ssmith3@usd259.net Karen Reynolds Wichita State University