INTRODUCTION TO ROBOTICS
|
|
|
- Camron Waters
- 6 years ago
- Views:
Transcription

1 INTRODUCTION TO ROBOTICS ROBOTICS CLUB SCIENCE AND TECHNOLOGY COUNCIL, IIT-KANPUR AUGUST 6 TH, 2016


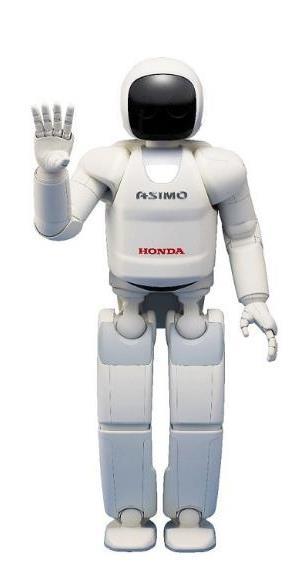
2 OUTLINE What is a robot? Classifications of Robots What goes behind making a robot? Mechanical Electrical Software Role of Robotics Club Basics for newbies Future prospects Nao





3 Which of these is a robot?
4 What is a robot? Freedictionary.com: A mechanical device that sometimes resembles a human and is capable of performing a variety of often complex human tasks on command or by being programmed in advance. whatis.techtarget.com/ A robot is a machine designed to execute one or more tasks automatically with speed and precision. There are as many different types of robots as there are tasks for them to perform. galileo.org/robotics/ To be called a robot, a machine must possess some or all of the following essential characteristics: Movement Sensing and manipulating the environment Display some kind of intelligence


5 Generation of Robot Comprised of simple robotic arm which could be made to do precise motions at high speed, repeatedly. Used widely in industries for automation of processes Require constant human supervision I Six-axis Robotic Arm AIIMS, Maruti Suzuki Plant Source:


 Source: http://www.robotpark.")
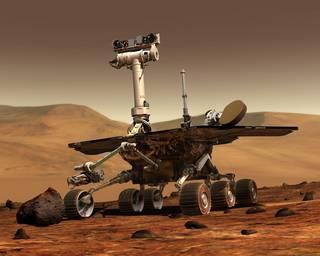
6 Generation of Robot Possess basic machine intelligence Robots equipped with sensors and a controller which processed data from the sensors and take appropriate decisions Human intervention minimized but required if robot malfunctions II Shakey, 1968, Stanford Mars Exploration Rover (MER) Source:


7 Generation of Robot Smart Robots which are given generalized information about the tasks needed to be done. Able to take decisions on the best way to do a certain task Rarely requires human supervision III Self- Driving Car, Tesla ROBART III


8 These robots can make real time decisions based on their environment Have the ability to work along side humans to form an effective work force Generation of Robot IV SYMBRION, Bristol Robotics Laboratory Baxter, Rethink Robotics
9 What goes behind making a robot? 1. Defining the Problem i.e. the purpose of construction and identifying the specific requirements 2. Researching and Designing i.e. planning and designing appropriate solutions 3. Creating a Prototype i.e. testing and troubleshooting the design 4. Building the robot 5. Programming and Testing the robot 6. Evaluating the Robot i.e. outlining the strengths and weaknesses in the robot Mechanical Electrical Programming Source: galileo.org/robotics/design.html






10 Role of Robotics Club To participate in events organized annually by various institutes and organizations Meet Gabbar and Tella, Wild Soccer Robots Website:



11 Role of Robotics Club Ongoing Projects WASP HuRo AUV To provide facilities to interested students for practicing amateur research in the field of robotics Website:









12 Role of Robotics Club To organize workshops and lectures for people to learn more about robotics Website:


13 Hardware: Lego Mindstorms NXT 1.0 Sensor: Lego light sensor Motor: Lego Servo Motor Programming: Labview Hardware: Arduino, Odroid XU4 Sensor: Camera Motor: DC Brushless Motor Programming: C Vs.

14 Basics for newbies THIS SECTION OF THE LECTURE IS USEFUL FOR THE WORKSHOP TO BE CONDUCTED IN THE FOLLOWING WEEK.



15 Chassis Mechanical It is the base frame of any robot on to which other components are mounted.



16 DC Motors Mechanical Generally operated at +12V. Negative supply make shaft rotate in opposite direction Speed reduces as voltage supplied decreases Torque and speed are inter-related A 10rpm motor has relatively higher torque than 100rpm or 300rpm motor. 6V, 180 rpm Micro DC Geared Motor 12V, rpm DC Geared Motor 300 RPM Side Shaft DC Gear Motor



17 Castor Mechanical It is type of wheel mounted at the bottom of the chassis for easy rolling movement. Also found in trolleys, hospital bed, desk chairs Swisvel Castor Castor Wheel in robot

18 Differential Drive Mechanical Differential' means that robot turning speed is determined by the speed difference between drive wheels Source: icreator.wordpress.com


 Lithium")
19 Power Source Electrical Most of the mobile robots carry on- board batteries. The kind of battery chosen depends on the sensors and actuators present in the robot. Switch Mode Power Supply (SMPS) Lithium Polymer (LiPo) Battery Lead- Acetate Battery
 A simple on-off switch The two")

20 Switches Electrical Single Pole Single Throw (SPST) Double Pole Double Throw (DPDT) A simple on-off switch The two terminals are either connected together or disconnected from each other Equivalent to two SPDT switches controlled by a single mechanism.
 Sensor Can measure")


21 Electronics Electrical Infra Red (IR) Sensor Can measure the heat of an object as well as detects the motion Passive in nature that is doesn t emit IR rays rather just detects them

22 Electronics Electrical Bipolar Junction Transistor (BJT) We would be using BJT as a switch. Cut- Off Region Active Region Saturated Region





23 Equipment to be Used Drilling Machine Soldering Kit Hacksaw Breadboard

24 What else you may learn here? Mechanical Designing Software like Solidworks, Autodesk Inventor, Ansys Learning industrial- grade manufacturing methods Different types of actuation in robotics using pneumatic, and other kind of motors Electrical Using various other sensors frequently used such as ultrasonic, IMU, camera Dealing with microprocessors and microcontrollers Designing circuits using simulation tools such as Microcap and physically testing them Programming Application of programming skills on hardware and physical systems: Feature detection using image processing such as detection of human faces Voice recognition Designing of low- level intelligence (i.e. controllers) Implementing Machine Learning Techniques (MLT)


25 Upcoming Events in the Semester Dates: 12 th -13 th August Timings and Venue shall be ed soon Dates: 1 st -4 th September Watch out of Robotics competitions!
26 THANK YOU! In case of any queries, contact: COORDINATORS: Anvesh Jadon Ankit Kumar Hemant Kumar Mayank Mittal SECRETARIES: Every hall has secretaries who can be approached regarding any doubts on robotics. For more information, visit:
Embedded Systems & Robotics (Winter Training Program) 6 Weeks/45 Days
 6 Weeks/45 Days") Embedded Systems & Robotics (Winter Training Program) 6 Weeks/45 Days PRESENTED BY RoboSpecies Technologies Pvt. Ltd. Office: W-53G, Sector-11, Noida-201301, U.P. Contact us: Email: stp@robospecies.com
Embedded Systems & Robotics (Winter Training Program) 6 Weeks/45 Days PRESENTED BY RoboSpecies Technologies Pvt. Ltd. Office: W-53G, Sector-11, Noida-201301, U.P. Contact us: Email: stp@robospecies.com
PCB & Circuit Designing (Summer Training Program) 6 Weeks/ 45 Days PRESENTED BY
 6 Weeks/ 45 Days PRESENTED BY") PCB & Circuit Designing (Summer Training Program) 6 Weeks/ 45 Days PRESENTED BY RoboSpecies Technologies Pvt. Ltd. Office: D-66, First Floor, Sector- 07, Noida, UP Contact us: Email: stp@robospecies.com
PCB & Circuit Designing (Summer Training Program) 6 Weeks/ 45 Days PRESENTED BY RoboSpecies Technologies Pvt. Ltd. Office: D-66, First Floor, Sector- 07, Noida, UP Contact us: Email: stp@robospecies.com
Essential Understandings with Guiding Questions Robotics Engineering
 Essential Understandings with Guiding Questions Robotics Engineering 1 st Quarter Theme: Orientation to a Successful Laboratory Experience Student Expectations Safety Emergency MSDS Organizational Systems
Essential Understandings with Guiding Questions Robotics Engineering 1 st Quarter Theme: Orientation to a Successful Laboratory Experience Student Expectations Safety Emergency MSDS Organizational Systems
Robotics & Embedded Systems (Summer Training Program) 4 Weeks/30 Days
 4 Weeks/30 Days") (Summer Training Program) 4 Weeks/30 Days PRESENTED BY RoboSpecies Technologies Pvt. Ltd. Office: D-66, First Floor, Sector- 07, Noida, UP Contact us: Email: stp@robospecies.com Website: www.robospecies.com
(Summer Training Program) 4 Weeks/30 Days PRESENTED BY RoboSpecies Technologies Pvt. Ltd. Office: D-66, First Floor, Sector- 07, Noida, UP Contact us: Email: stp@robospecies.com Website: www.robospecies.com
PCB & Circuit Designing (Summer Training Program 2014)
") (Summer Training Program 2014) PRESENTED BY In association with RoboSpecies Technologies Pvt. Ltd. Office: A-90, Lower Ground Floor, Sec- 4, Noida, UP Contact us: Email: stp@robospecies.com Website: www.robospecies.com
(Summer Training Program 2014) PRESENTED BY In association with RoboSpecies Technologies Pvt. Ltd. Office: A-90, Lower Ground Floor, Sec- 4, Noida, UP Contact us: Email: stp@robospecies.com Website: www.robospecies.com
Mechatronics Engineering and Automation Faculty of Engineering, Ain Shams University MCT-151, Spring 2015 Lab-4: Electric Actuators
 Mechatronics Engineering and Automation Faculty of Engineering, Ain Shams University MCT-151, Spring 2015 Lab-4: Electric Actuators Ahmed Okasha, Assistant Lecturer okasha1st@gmail.com Objective Have a
Mechatronics Engineering and Automation Faculty of Engineering, Ain Shams University MCT-151, Spring 2015 Lab-4: Electric Actuators Ahmed Okasha, Assistant Lecturer okasha1st@gmail.com Objective Have a
HOLY ANGEL UNIVERSITY COLLEGE OF INFORMATION AND COMMUNICATIONS TECHNOLOGY ROBOT MODELING AND PROGRAMMING COURSE SYLLABUS
 HOLY ANGEL UNIVERSITY COLLEGE OF INFORMATION AND COMMUNICATIONS TECHNOLOGY ROBOT MODELING AND PROGRAMMING COURSE SYLLABUS Code : 6ROBOTMOD Prerequisite : 6ARTINTEL Credit : 3 s (3 hours LAB) Year Level:
HOLY ANGEL UNIVERSITY COLLEGE OF INFORMATION AND COMMUNICATIONS TECHNOLOGY ROBOT MODELING AND PROGRAMMING COURSE SYLLABUS Code : 6ROBOTMOD Prerequisite : 6ARTINTEL Credit : 3 s (3 hours LAB) Year Level:
PCB & Circuit Designing
 (Summer Training Program) 4 Weeks/30 Days PRESENTED BY RoboSpecies Technologies Pvt. Ltd. Office: W-53G, Sector-11, Noida-201301, U.P. Contact us: Email: stp@robospecies.com Website: www.robospecies.com
(Summer Training Program) 4 Weeks/30 Days PRESENTED BY RoboSpecies Technologies Pvt. Ltd. Office: W-53G, Sector-11, Noida-201301, U.P. Contact us: Email: stp@robospecies.com Website: www.robospecies.com
INTRODUCTION OF SOME APPROACHES FOR EDUCATIONS OF ROBOT DESIGN AND MANUFACTURING
 INTRODUCTION OF SOME APPROACHES FOR EDUCATIONS OF ROBOT DESIGN AND MANUFACTURING T. Matsuo *,a, M. Tatsuguchi a, T. Higaki a, S. Kuchii a, M. Shimazu a and H. Terai a a Department of Creative Engineering,
INTRODUCTION OF SOME APPROACHES FOR EDUCATIONS OF ROBOT DESIGN AND MANUFACTURING T. Matsuo *,a, M. Tatsuguchi a, T. Higaki a, S. Kuchii a, M. Shimazu a and H. Terai a a Department of Creative Engineering,
PRESENTED BY HUMANOID IIT KANPUR
 SENSORS & ACTUATORS Robotics Club (Science and Technology Council, IITK) PRESENTED BY HUMANOID IIT KANPUR October 11th, 2017 WHAT ARE WE GOING TO LEARN!! COMPARISON between Transducers Sensors And Actuators.
SENSORS & ACTUATORS Robotics Club (Science and Technology Council, IITK) PRESENTED BY HUMANOID IIT KANPUR October 11th, 2017 WHAT ARE WE GOING TO LEARN!! COMPARISON between Transducers Sensors And Actuators.
WELCOME TO THE SEMINAR ON INTRODUCTION TO ROBOTICS
 WELCOME TO THE SEMINAR ON INTRODUCTION TO ROBOTICS Introduction to ROBOTICS Get started with working with Electronic circuits. Helping in building a basic line follower Understanding more about sensors
WELCOME TO THE SEMINAR ON INTRODUCTION TO ROBOTICS Introduction to ROBOTICS Get started with working with Electronic circuits. Helping in building a basic line follower Understanding more about sensors
AUTONOMOUS UNDERWATER VEHICLE Introductory Session. January 07, 2017 IITK
 AUTONOMOUS UNDERWATER VEHICLE Introductory Session January 07, 2017 IITK Purpose of an AUV Pluto Plus AUV Remus AUV Battlespace Preparation AUV Cornell AUV: Gemini COMMERCIAL Maps of Seafloor Building
AUTONOMOUS UNDERWATER VEHICLE Introductory Session January 07, 2017 IITK Purpose of an AUV Pluto Plus AUV Remus AUV Battlespace Preparation AUV Cornell AUV: Gemini COMMERCIAL Maps of Seafloor Building
Deriving Consistency from LEGOs
 Deriving Consistency from LEGOs What we have learned in 6 years of FLL and 7 years of Lego Robotics by Austin and Travis Schuh 1 2006 Austin and Travis Schuh, all rights reserved Objectives Basic Building
Deriving Consistency from LEGOs What we have learned in 6 years of FLL and 7 years of Lego Robotics by Austin and Travis Schuh 1 2006 Austin and Travis Schuh, all rights reserved Objectives Basic Building
A Lego-Based Soccer-Playing Robot Competition For Teaching Design
 Session 2620 A Lego-Based Soccer-Playing Robot Competition For Teaching Design Ronald A. Lessard Norwich University Abstract Course Objectives in the ME382 Instrumentation Laboratory at Norwich University
Session 2620 A Lego-Based Soccer-Playing Robot Competition For Teaching Design Ronald A. Lessard Norwich University Abstract Course Objectives in the ME382 Instrumentation Laboratory at Norwich University
Voice Guided Military Robot for Defence Application
 IJIRST International Journal for Innovative Research in Science & Technology Volume 2 Issue 11 April 2016 ISSN (online): 2349-6010 Voice Guided Military Robot for Defence Application Palak N. Patel Minal
IJIRST International Journal for Innovative Research in Science & Technology Volume 2 Issue 11 April 2016 ISSN (online): 2349-6010 Voice Guided Military Robot for Defence Application Palak N. Patel Minal
MASTER SHIFU. STUDENT NAME: Vikramadityan. M ROBOT NAME: Master Shifu COURSE NAME: Intelligent Machine Design Lab
 MASTER SHIFU STUDENT NAME: Vikramadityan. M ROBOT NAME: Master Shifu COURSE NAME: Intelligent Machine Design Lab COURSE NUMBER: EEL 5666C TA: Andy Gray, Nick Cox INSTRUCTORS: Dr. A. Antonio Arroyo, Dr.
MASTER SHIFU STUDENT NAME: Vikramadityan. M ROBOT NAME: Master Shifu COURSE NAME: Intelligent Machine Design Lab COURSE NUMBER: EEL 5666C TA: Andy Gray, Nick Cox INSTRUCTORS: Dr. A. Antonio Arroyo, Dr.
Proseminar Roboter und Aktivmedien. Outline of today s lecture. Acknowledgments. Educational robots achievements and challenging
 Proseminar Roboter und Aktivmedien Educational robots achievements and challenging Lecturer Lecturer Houxiang Houxiang Zhang Zhang TAMS, TAMS, Department Department of of Informatics Informatics University
Proseminar Roboter und Aktivmedien Educational robots achievements and challenging Lecturer Lecturer Houxiang Houxiang Zhang Zhang TAMS, TAMS, Department Department of of Informatics Informatics University
Servos A Brief Guide
 Servos A Brief Guide David Sanderson, MEng (hons) DIS, CEng MIMarEST Technical Director at Kitronik Radio Control (RC) Servos are a simple way to provide electronically controlled movement for many projects.
Servos A Brief Guide David Sanderson, MEng (hons) DIS, CEng MIMarEST Technical Director at Kitronik Radio Control (RC) Servos are a simple way to provide electronically controlled movement for many projects.
RoboBulls 2016: RoboCup Small Size League
 RoboBulls 2016: RoboCup Small Size League M. Shamsi 1, J. Waugh 1, F. Williams 2, A. Ross 2, and M. Llofriu 1,3 A. Weitzenfeld 1 1 Dept. of Computer Science and Engineering 2 Dept. of Electrical Engineering,
RoboBulls 2016: RoboCup Small Size League M. Shamsi 1, J. Waugh 1, F. Williams 2, A. Ross 2, and M. Llofriu 1,3 A. Weitzenfeld 1 1 Dept. of Computer Science and Engineering 2 Dept. of Electrical Engineering,
IIT PATNA PLACEMENT BROCHURE M.TECH MECHATRONICS
 IIT PATNA PLACEMENT BROCHURE 2017-2018 M.TECH MECHATRONICS CONTENTS 1. About Us 2. Course curriculum 3. Laboratory facilities 4. Student Profile 5. Research and Innovation 6. Workshops and Student activities
IIT PATNA PLACEMENT BROCHURE 2017-2018 M.TECH MECHATRONICS CONTENTS 1. About Us 2. Course curriculum 3. Laboratory facilities 4. Student Profile 5. Research and Innovation 6. Workshops and Student activities
DC motor control using arduino
 DC motor control using arduino 1) Introduction: First we need to differentiate between DC motor and DC generator and where we can use it in this experiment. What is the main different between the DC-motor,
DC motor control using arduino 1) Introduction: First we need to differentiate between DC motor and DC generator and where we can use it in this experiment. What is the main different between the DC-motor,
Internet of Things (Winter Training Program) 6 Weeks/45 Days
 6 Weeks/45 Days") (Winter Training Program) 6 Weeks/45 Days PRESENTED BY RoboSpecies Technologies Pvt. Ltd. Office: W-53g, Sec- 11, Noida, UP Contact us: Email: stp@robospecies.com Website: www.robospecies.com Office: +91-120-4245860
(Winter Training Program) 6 Weeks/45 Days PRESENTED BY RoboSpecies Technologies Pvt. Ltd. Office: W-53g, Sec- 11, Noida, UP Contact us: Email: stp@robospecies.com Website: www.robospecies.com Office: +91-120-4245860
Total Hours Registration through Website or for further details please visit (Refer Upcoming Events Section)
") Total Hours 110-150 Registration Q R Code Registration through Website or for further details please visit http://www.rknec.edu/ (Refer Upcoming Events Section) Module 1: Basics of Microprocessor & Microcontroller
Total Hours 110-150 Registration Q R Code Registration through Website or for further details please visit http://www.rknec.edu/ (Refer Upcoming Events Section) Module 1: Basics of Microprocessor & Microcontroller
FLL Robot Design Workshop
 FLL Robot Design Workshop Tool Design and Mechanism Prepared by Dr. C. H. (Tony) Lin Principal Engineer Tire and Vehicle Mechanics Goodyear Tire & Rubber Company tony_lin@goodyear.com Description Mechanism
FLL Robot Design Workshop Tool Design and Mechanism Prepared by Dr. C. H. (Tony) Lin Principal Engineer Tire and Vehicle Mechanics Goodyear Tire & Rubber Company tony_lin@goodyear.com Description Mechanism
Programming PIC Microchips
 Programming PIC Microchips Fís Foghlaim Forbairt Programming the PIC microcontroller using Genie Programming Editor Workshop provided & facilitated by the PDST www.t4.ie Page 1 DC motor control: DC motors
Programming PIC Microchips Fís Foghlaim Forbairt Programming the PIC microcontroller using Genie Programming Editor Workshop provided & facilitated by the PDST www.t4.ie Page 1 DC motor control: DC motors
DC Motor and Servo motor Control with ARM and Arduino. Created by:
 DC Motor and Servo motor Control with ARM and Arduino Created by: Andrew Kaler (39345) Tucker Boyd (46434) Mohammed Chowdhury (860822) Tazwar Muttaqi (901700) Mark Murdock (98071) May 4th, 2017 Objective
DC Motor and Servo motor Control with ARM and Arduino Created by: Andrew Kaler (39345) Tucker Boyd (46434) Mohammed Chowdhury (860822) Tazwar Muttaqi (901700) Mark Murdock (98071) May 4th, 2017 Objective
GetTutorialized Workshops Brochure-2017
 GetTutorialized Workshops Brochure-2017 Internet of Things with Arduino Workshop course Content: 1. Introduction to Internet of Things 2. Introduction to Microcontrollers and Microprocessors 3. Microcontrollers
GetTutorialized Workshops Brochure-2017 Internet of Things with Arduino Workshop course Content: 1. Introduction to Internet of Things 2. Introduction to Microcontrollers and Microprocessors 3. Microcontrollers
Autonomous Obstacle Avoiding and Path Following Rover
 Volume 114 No. 9 2017, 271-281 ISSN: 1311-8080 (printed version); ISSN: 1314-3395 (on-line version) url: http://www.ijpam.eu Autonomous Obstacle Avoiding and Path Following Rover ijpam.eu Sandeep Polina
Volume 114 No. 9 2017, 271-281 ISSN: 1311-8080 (printed version); ISSN: 1314-3395 (on-line version) url: http://www.ijpam.eu Autonomous Obstacle Avoiding and Path Following Rover ijpam.eu Sandeep Polina
L E C T U R E R, E L E C T R I C A L A N D M I C R O E L E C T R O N I C E N G I N E E R I N G
 P R O F. S L A C K L E C T U R E R, E L E C T R I C A L A N D M I C R O E L E C T R O N I C E N G I N E E R I N G G B S E E E @ R I T. E D U B L D I N G 9, O F F I C E 0 9-3 1 8 9 ( 5 8 5 ) 4 7 5-5 1 0
P R O F. S L A C K L E C T U R E R, E L E C T R I C A L A N D M I C R O E L E C T R O N I C E N G I N E E R I N G G B S E E E @ R I T. E D U B L D I N G 9, O F F I C E 0 9-3 1 8 9 ( 5 8 5 ) 4 7 5-5 1 0
Pre-Day Questionnaire
 LEGO Mindstorms Pre-Day Questionnaire Your Age? Please select your age from the options below: a) 11 b) 12 c) 13 d) 14 e) 15 or Older 0 0 0 0 0 11 12 13 14 15&or&Older Good at Problem Solving? Do you think
LEGO Mindstorms Pre-Day Questionnaire Your Age? Please select your age from the options below: a) 11 b) 12 c) 13 d) 14 e) 15 or Older 0 0 0 0 0 11 12 13 14 15&or&Older Good at Problem Solving? Do you think
COS Lecture 1 Autonomous Robot Navigation
 COS 495 - Lecture 1 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Introduction Education B.Sc.Eng Engineering Phyics, Queen s University
COS 495 - Lecture 1 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Introduction Education B.Sc.Eng Engineering Phyics, Queen s University
Robotics II DESCRIPTION. EXAM INFORMATION Items
 EXAM INFORMATION Items 37 Points 49 Prerequisites NONE Grade Level 10-12 Course Length ONE SEMESTER Career Cluster MANUFACTURING SCIENCE, TECHNOLOGY, ENGINEERING, AND MATHEMATICS Performance Standards
EXAM INFORMATION Items 37 Points 49 Prerequisites NONE Grade Level 10-12 Course Length ONE SEMESTER Career Cluster MANUFACTURING SCIENCE, TECHNOLOGY, ENGINEERING, AND MATHEMATICS Performance Standards
Rockets, Robots, Hovercraft, and Quadracopters, all for the STEM of IT! John J. Helferty Temple University
 Rockets, Robots, Hovercraft, and Quadracopters, all for the STEM of IT! John J. Helferty Temple University OUTLINE Student Space Exploration and Embedded Systems Lab Recent History of Projects New Introduction
Rockets, Robots, Hovercraft, and Quadracopters, all for the STEM of IT! John J. Helferty Temple University OUTLINE Student Space Exploration and Embedded Systems Lab Recent History of Projects New Introduction
Chapter 1. Robots and Programs
 Chapter 1 Robots and Programs 1 2 Chapter 1 Robots and Programs Introduction Without a program, a robot is just an assembly of electronic and mechanical components. This book shows you how to give it a
Chapter 1 Robots and Programs 1 2 Chapter 1 Robots and Programs Introduction Without a program, a robot is just an assembly of electronic and mechanical components. This book shows you how to give it a
Autonomous Following RObot Initial Design Review
 Autonomous Following RObot Initial Design Review James Tse (Leader) Wei Dai Travis Frecker Peter Verlangieri Professor John Johnson ECE 189A Fall 2012 Initial Design Review: Project Description Original
Autonomous Following RObot Initial Design Review James Tse (Leader) Wei Dai Travis Frecker Peter Verlangieri Professor John Johnson ECE 189A Fall 2012 Initial Design Review: Project Description Original
TETRIX PULSE Workshop Guide
 TETRIX PULSE Workshop Guide 44512 1 Who Are We and Why Are We Here? Who is Pitsco? Pitsco s unwavering focus on innovative educational solutions and unparalleled customer service began when the company
TETRIX PULSE Workshop Guide 44512 1 Who Are We and Why Are We Here? Who is Pitsco? Pitsco s unwavering focus on innovative educational solutions and unparalleled customer service began when the company
MEM380 Applied Autonomous Robots I Winter Feedback Control USARSim
 MEM380 Applied Autonomous Robots I Winter 2011 Feedback Control USARSim Transforming Accelerations into Position Estimates In a perfect world It s not a perfect world. We have noise and bias in our acceleration
MEM380 Applied Autonomous Robots I Winter 2011 Feedback Control USARSim Transforming Accelerations into Position Estimates In a perfect world It s not a perfect world. We have noise and bias in our acceleration
MECHATRONICS IN A BOX
 MECHATRONICS IN A BOX A Complete Mechatronics Solution for the Classroom amtekcompany.com Contents Introduction Programming Arduino microcontrollers Motor Control Training Course Flowcode 8 Formula AllCode
MECHATRONICS IN A BOX A Complete Mechatronics Solution for the Classroom amtekcompany.com Contents Introduction Programming Arduino microcontrollers Motor Control Training Course Flowcode 8 Formula AllCode
Low-Cost hardware connectivity with Simulink MATLAB-Day RWTH Aachen Sebastian Groß October 24th, 2013
 Low-Cost hardware connectivity with Simulink MATLAB-Day RWTH Aachen Sebastian Groß October 24th, 2013 2013 The MathWorks, Inc. 1 LEGO Mindstorms NXT: a first demo EDUCON 2013, Berlin, Germany 2 A first
Low-Cost hardware connectivity with Simulink MATLAB-Day RWTH Aachen Sebastian Groß October 24th, 2013 2013 The MathWorks, Inc. 1 LEGO Mindstorms NXT: a first demo EDUCON 2013, Berlin, Germany 2 A first
MAKER: Development of Smart Mobile Robot System to Help Middle School Students Learn about Robot Perception
 Paper ID #14537 MAKER: Development of Smart Mobile Robot System to Help Middle School Students Learn about Robot Perception Dr. Sheng-Jen Tony Hsieh, Texas A&M University Dr. Sheng-Jen ( Tony ) Hsieh is
Paper ID #14537 MAKER: Development of Smart Mobile Robot System to Help Middle School Students Learn about Robot Perception Dr. Sheng-Jen Tony Hsieh, Texas A&M University Dr. Sheng-Jen ( Tony ) Hsieh is
Pre-Activity Quiz. 2 feet forward in a straight line? 1. What is a design challenge? 2. How do you program a robot to move
 Maze Challenge Pre-Activity Quiz 1. What is a design challenge? 2. How do you program a robot to move 2 feet forward in a straight line? 2 Pre-Activity Quiz Answers 1. What is a design challenge? A design
Maze Challenge Pre-Activity Quiz 1. What is a design challenge? 2. How do you program a robot to move 2 feet forward in a straight line? 2 Pre-Activity Quiz Answers 1. What is a design challenge? A design
ME375 Lab Project. Bradley Boane & Jeremy Bourque April 25, 2018
 ME375 Lab Project Bradley Boane & Jeremy Bourque April 25, 2018 Introduction: The goal of this project was to build and program a two-wheel robot that travels forward in a straight line for a distance
ME375 Lab Project Bradley Boane & Jeremy Bourque April 25, 2018 Introduction: The goal of this project was to build and program a two-wheel robot that travels forward in a straight line for a distance
RC Servo Interface. Figure Bipolar amplifier connected to a large DC motor
 The bipolar amplifier is well suited for controlling motors for vehicle propulsion. Figure 12-45 shows a good-sized 24VDC motor that runs nicely on 13.8V from a lead acid battery based power supply. You
The bipolar amplifier is well suited for controlling motors for vehicle propulsion. Figure 12-45 shows a good-sized 24VDC motor that runs nicely on 13.8V from a lead acid battery based power supply. You
ECE 511: MICROPROCESSORS
 ECE 511: MICROPROCESSORS A project report on SNIFFING DOG Under the guidance of Prof. Jens Peter Kaps By, Preethi Santhanam (G00767634) Ranjit Mandavalli (G00819673) Shaswath Raghavan (G00776950) Swathi
ECE 511: MICROPROCESSORS A project report on SNIFFING DOG Under the guidance of Prof. Jens Peter Kaps By, Preethi Santhanam (G00767634) Ranjit Mandavalli (G00819673) Shaswath Raghavan (G00776950) Swathi
HAND GESTURE CONTROLLED ROBOT USING ARDUINO
 HAND GESTURE CONTROLLED ROBOT USING ARDUINO Vrushab Sakpal 1, Omkar Patil 2, Sagar Bhagat 3, Badar Shaikh 4, Prof.Poonam Patil 5 1,2,3,4,5 Department of Instrumentation Bharati Vidyapeeth C.O.E,Kharghar,Navi
HAND GESTURE CONTROLLED ROBOT USING ARDUINO Vrushab Sakpal 1, Omkar Patil 2, Sagar Bhagat 3, Badar Shaikh 4, Prof.Poonam Patil 5 1,2,3,4,5 Department of Instrumentation Bharati Vidyapeeth C.O.E,Kharghar,Navi
Actuators in Automatic Control System
 Actuators in Automatic Control System Measurement & Control Systems Transducers Measurement Process Actuators Data processing Requirement analyses Decision making Control actions CONTROL action requires
Actuators in Automatic Control System Measurement & Control Systems Transducers Measurement Process Actuators Data processing Requirement analyses Decision making Control actions CONTROL action requires
Arduino Based Robot for Pick and Place Application
 Arduino Based Robot for Pick and Place Application Priya H. Pande Pallavi V. Saklecha Prof. Pragati D. Pawar Prof. Atul N. Shire Abstract Here, the project is designed to develop a system in which robot
Arduino Based Robot for Pick and Place Application Priya H. Pande Pallavi V. Saklecha Prof. Pragati D. Pawar Prof. Atul N. Shire Abstract Here, the project is designed to develop a system in which robot
Program.
 Program Introduction S TE AM www.kiditech.org About Kiditech In Kiditech's mighty world, we coach, play and celebrate an innovative technology program: K-12 STEAM. We gather at Kiditech to learn and have
Program Introduction S TE AM www.kiditech.org About Kiditech In Kiditech's mighty world, we coach, play and celebrate an innovative technology program: K-12 STEAM. We gather at Kiditech to learn and have
DEVELOPMENT OF A HUMANOID ROBOT FOR EDUCATION AND OUTREACH. K. Kelly, D. B. MacManus, C. McGinn
 DEVELOPMENT OF A HUMANOID ROBOT FOR EDUCATION AND OUTREACH K. Kelly, D. B. MacManus, C. McGinn Department of Mechanical and Manufacturing Engineering, Trinity College, Dublin 2, Ireland. ABSTRACT Robots
DEVELOPMENT OF A HUMANOID ROBOT FOR EDUCATION AND OUTREACH K. Kelly, D. B. MacManus, C. McGinn Department of Mechanical and Manufacturing Engineering, Trinity College, Dublin 2, Ireland. ABSTRACT Robots
Inspiring Creative Fun Ysbrydoledig Creadigol Hwyl. LEGO Bowling Workbook
 Inspiring Creative Fun Ysbrydoledig Creadigol Hwyl LEGO Bowling Workbook Robots are devices, sometimes they run basic instructions via electric circuitry or on most occasions they can be programmable.
Inspiring Creative Fun Ysbrydoledig Creadigol Hwyl LEGO Bowling Workbook Robots are devices, sometimes they run basic instructions via electric circuitry or on most occasions they can be programmable.
Robotic Navigation Distance Control Platform
 Robotic Navigation Distance Control Platform System Block Diagram Student: Scott Sendra Project Advisors: Dr. Schertz Dr. Malinowski Date: November 18, 2003 Objective The objective of the Robotic Navigation
Robotic Navigation Distance Control Platform System Block Diagram Student: Scott Sendra Project Advisors: Dr. Schertz Dr. Malinowski Date: November 18, 2003 Objective The objective of the Robotic Navigation
Introduction to robotics. Md. Ferdous Alam, Lecturer, MEE, SUST
 Introduction to robotics Md. Ferdous Alam, Lecturer, MEE, SUST Hello class! Let s watch a video! So, what do you think? It s cool, isn t it? The dedication is not! A brief history The first digital and
Introduction to robotics Md. Ferdous Alam, Lecturer, MEE, SUST Hello class! Let s watch a video! So, what do you think? It s cool, isn t it? The dedication is not! A brief history The first digital and
LS Creative Learnings Pvt Ltd. STEM-Robotics Education. Report for Sep S.B. Patil Public School, Pune
 LS Creative s Pvt Ltd. STEM-Robotics Education Report for Sep 2017 S.B. Patil Public School, Pune 1 Sept 2017 Grade: III Helicopter To understand about different modes of transportation like airways. Science
LS Creative s Pvt Ltd. STEM-Robotics Education Report for Sep 2017 S.B. Patil Public School, Pune 1 Sept 2017 Grade: III Helicopter To understand about different modes of transportation like airways. Science
Semiconductor 9/21/2015
 Semiconductor Electronics 9/21/2015 Starting simple the diode. The diode is one of the simplest semiconductor devices. It is comprised of two layers of semiconductor. One is impregnated with an electron
Semiconductor Electronics 9/21/2015 Starting simple the diode. The diode is one of the simplest semiconductor devices. It is comprised of two layers of semiconductor. One is impregnated with an electron
Henry Lin, Department of Electrical and Computer Engineering, California State University, Bakersfield Lecture 8 (Robotics) July 25 th, 2012
 July 25 th, 2012") Henry Lin, Department of Electrical and Computer Engineering, California State University, Bakersfield Lecture 8 (Robotics) July 25 th, 2012 1 2 Robotic Applications in Smart Homes Control of the physical
Henry Lin, Department of Electrical and Computer Engineering, California State University, Bakersfield Lecture 8 (Robotics) July 25 th, 2012 1 2 Robotic Applications in Smart Homes Control of the physical
Mindstorms NXT. mindstorms.lego.com
 Mindstorms NXT mindstorms.lego.com A3B99RO Robots: course organization At the beginning of the semester the students are divided into small teams (2 to 3 students). Each team uses the basic set of the
Mindstorms NXT mindstorms.lego.com A3B99RO Robots: course organization At the beginning of the semester the students are divided into small teams (2 to 3 students). Each team uses the basic set of the
Hare and Snail Challenges READY, GO!
 Hare and Snail Challenges READY, GO! Pre-Activity Quiz 1. What are some design considerations to make a fast robot? 2. What are some design considerations to make a slow robot? 2 Pre-Activity Quiz Answers
Hare and Snail Challenges READY, GO! Pre-Activity Quiz 1. What are some design considerations to make a fast robot? 2. What are some design considerations to make a slow robot? 2 Pre-Activity Quiz Answers
acknowledgments...xv introduction...xvii 1 LEGO MINDSTORMS NXT 2.0: people, pieces, and potential getting started with the NXT 2.0 set...
 acknowledgments...xv introduction...xvii about this book...xvii part I: introduction to LEGO MINDSTORMS NXT 2.0...xviii part II: building...xviii part III: programming...xviii part IV: projects...xix companion
acknowledgments...xv introduction...xvii about this book...xvii part I: introduction to LEGO MINDSTORMS NXT 2.0...xviii part II: building...xviii part III: programming...xviii part IV: projects...xix companion
Two Hour Robot. Lets build a Robot.
 Lets build a Robot. Our robot will use an ultrasonic sensor and servos to navigate it s way around a maze. We will be making 2 voltage circuits : A 5 Volt for our ultrasonic sensor, sound and lights powered
Lets build a Robot. Our robot will use an ultrasonic sensor and servos to navigate it s way around a maze. We will be making 2 voltage circuits : A 5 Volt for our ultrasonic sensor, sound and lights powered
Budget Robotics Octabot Assembly Instructions
 Budget Robotics Octabot Assembly Instructions The Budget Robotics Octabot kit is a low-cost 7" diameter servo-driven robot base, ready for expansion. Assembly is simple, and takes less than 15 minutes.
Budget Robotics Octabot Assembly Instructions The Budget Robotics Octabot kit is a low-cost 7" diameter servo-driven robot base, ready for expansion. Assembly is simple, and takes less than 15 minutes.
How to Build the Robotics++ V2 Robot. Last Edited Nov
 How to Build the Robotics++ V2 Robot Last Edited Nov. 15-2014 www.roboticscity.com 1 Completed Robotics++ V2 Robot. More views of completed robot can be found at the end of this instructions manual The
How to Build the Robotics++ V2 Robot Last Edited Nov. 15-2014 www.roboticscity.com 1 Completed Robotics++ V2 Robot. More views of completed robot can be found at the end of this instructions manual The
Automobile Prototype Servo Control
 IJIRST International Journal for Innovative Research in Science & Technology Volume 2 Issue 10 March 2016 ISSN (online): 2349-6010 Automobile Prototype Servo Control Mr. Linford William Fernandes Don Bosco
IJIRST International Journal for Innovative Research in Science & Technology Volume 2 Issue 10 March 2016 ISSN (online): 2349-6010 Automobile Prototype Servo Control Mr. Linford William Fernandes Don Bosco
Introducing the Quadrotor Flying Robot
 Introducing the Quadrotor Flying Robot Roy Brewer Organizer Philadelphia Robotics Meetup Group August 13, 2009 What is a Quadrotor? A vehicle having 4 rotors (propellers) at each end of a square cross
Introducing the Quadrotor Flying Robot Roy Brewer Organizer Philadelphia Robotics Meetup Group August 13, 2009 What is a Quadrotor? A vehicle having 4 rotors (propellers) at each end of a square cross
Industrial Automation Training Academy. Arduino, LabVIEW & PLC Training Programs Duration: 6 Months (180 ~ 240 Hours)
") nfi Industrial Automation Training Academy Presents Arduino, LabVIEW & PLC Training Programs Duration: 6 Months (180 ~ 240 Hours) For: Electronics & Communication Engineering Electrical Engineering Instrumentation
nfi Industrial Automation Training Academy Presents Arduino, LabVIEW & PLC Training Programs Duration: 6 Months (180 ~ 240 Hours) For: Electronics & Communication Engineering Electrical Engineering Instrumentation
EXPERIMENT 6: Advanced I/O Programming
 EXPERIMENT 6: Advanced I/O Programming Objectives: To familiarize students with DC Motor control and Stepper Motor Interfacing. To utilize MikroC and MPLAB for Input Output Interfacing and motor control.
EXPERIMENT 6: Advanced I/O Programming Objectives: To familiarize students with DC Motor control and Stepper Motor Interfacing. To utilize MikroC and MPLAB for Input Output Interfacing and motor control.
Switches. Resources and methods for learning about these subjects (list a few here, in preparation for your research):
:") Switches This worksheet and all related files are licensed under the Creative Commons Attribution License, version 1.0. To view a copy of this license, visit http://creativecommons.org/licenses/by/1.0/,
Switches This worksheet and all related files are licensed under the Creative Commons Attribution License, version 1.0. To view a copy of this license, visit http://creativecommons.org/licenses/by/1.0/,
Switches. Resources and methods for learning about these subjects (list a few here, in preparation for your research):
:") Switches This worksheet and all related files are licensed under the Creative Commons Attribution License, version 1.0. To view a copy of this license, visit http://creativecommons.org/licenses/by/1.0/,
Switches This worksheet and all related files are licensed under the Creative Commons Attribution License, version 1.0. To view a copy of this license, visit http://creativecommons.org/licenses/by/1.0/,
Wirelessly Controlled Wheeled Robotic Arm
 Wirelessly Controlled Wheeled Robotic Arm Muhammmad Tufail 1, Mian Muhammad Kamal 2, Muhammad Jawad 3 1 Department of Electrical Engineering City University of science and Information Technology Peshawar
Wirelessly Controlled Wheeled Robotic Arm Muhammmad Tufail 1, Mian Muhammad Kamal 2, Muhammad Jawad 3 1 Department of Electrical Engineering City University of science and Information Technology Peshawar
Park Ranger. Li Yang April 21, 2014
 Park Ranger Li Yang April 21, 2014 University of Florida Department of Electrical and Computer Engineering EEL 5666C IMDL Written Report Instructors: A. Antonio Arroyo, Eric M. Schwartz TAs: Andy Gray,
Park Ranger Li Yang April 21, 2014 University of Florida Department of Electrical and Computer Engineering EEL 5666C IMDL Written Report Instructors: A. Antonio Arroyo, Eric M. Schwartz TAs: Andy Gray,
ILR #1: Sensors and Motor Control Lab. Zihao (Theo) Zhang- Team A October 14, 2016 Teammates: Amit Agarwal, Harry Golash, Yihao Qian, Menghan Zhang
 Zhang- Team A October 14, 2016 Teammates: Amit Agarwal, Harry Golash, Yihao Qian, Menghan Zhang") ILR #1: Sensors and Motor Control Lab Zihao (Theo) Zhang- Team A October 14, 2016 Teammates: Amit Agarwal, Harry Golash, Yihao Qian, Menghan Zhang Individual Progress For my team s sensors and motor control
ILR #1: Sensors and Motor Control Lab Zihao (Theo) Zhang- Team A October 14, 2016 Teammates: Amit Agarwal, Harry Golash, Yihao Qian, Menghan Zhang Individual Progress For my team s sensors and motor control
Program Your Robot to Perform a Task
 Youth Explore Trades Skills Description In this activity, students gain hands-on experience with programming a robot to perform tasks. This activity includes seven task challenges. Students will work in
Youth Explore Trades Skills Description In this activity, students gain hands-on experience with programming a robot to perform tasks. This activity includes seven task challenges. Students will work in
GPS System Design and Control Modeling. Chua Shyan Jin, Ronald. Assoc. Prof Gerard Leng. Aeronautical Engineering Group, NUS
 GPS System Design and Control Modeling Chua Shyan Jin, Ronald Assoc. Prof Gerard Leng Aeronautical Engineering Group, NUS Abstract A GPS system for the autonomous navigation and surveillance of an airship
GPS System Design and Control Modeling Chua Shyan Jin, Ronald Assoc. Prof Gerard Leng Aeronautical Engineering Group, NUS Abstract A GPS system for the autonomous navigation and surveillance of an airship
BOMB ROBOTS NASA CURIOSITY MARS ROVER
 BOMB ROBOTS This robot is used by FBI bomb-squads in Oklahoma. It allows access to the bomb without endangering human life as it investigates, moves, and when necessary, disables the bomb. NASA CURIOSITY
BOMB ROBOTS This robot is used by FBI bomb-squads in Oklahoma. It allows access to the bomb without endangering human life as it investigates, moves, and when necessary, disables the bomb. NASA CURIOSITY
Robotics Initiative at IIT IPRO 316. Fall 2003
 Robotics Initiative at IIT IPRO 316 Fall 2003 Faculty and Team Members Faculty Lead Prof. Peter Lykos Student Members Scorpion Group Jacqueline Wegscheid (Scorpion Team Leader) Yuan Chen Ankur Sharma (IPRO
Robotics Initiative at IIT IPRO 316 Fall 2003 Faculty and Team Members Faculty Lead Prof. Peter Lykos Student Members Scorpion Group Jacqueline Wegscheid (Scorpion Team Leader) Yuan Chen Ankur Sharma (IPRO
Educational Workshop Series 3-Days Robotics Workshop : Learn to build autonomous robots
 Educational Workshop Series 3-Days Robotics Workshop : Learn to build autonomous robots LEARN FOR WHOM The basics of robotics, circuits and motors.how to solder, how to build a circuit on breadboard and
Educational Workshop Series 3-Days Robotics Workshop : Learn to build autonomous robots LEARN FOR WHOM The basics of robotics, circuits and motors.how to solder, how to build a circuit on breadboard and
PREREQUISITES: MODULE 10: MICROCONTROLLERS II; MODULE 14: DISCRETE COMPONENTS. MODULE 13 (SENSORS) WOULD ALSO BE HELPFUL.
 WOULD ALSO BE HELPFUL.") ELECTROMECHANICAL SYSTEMS PREREQUISITES: MODULE 10: MICROCONTROLLERS II; MODULE 14: DISCRETE COMPONENTS. MODULE 13 (SENSORS) WOULD ALSO BE HELPFUL. OUTLINE OF MODULE 17: What you will learn about in this
ELECTROMECHANICAL SYSTEMS PREREQUISITES: MODULE 10: MICROCONTROLLERS II; MODULE 14: DISCRETE COMPONENTS. MODULE 13 (SENSORS) WOULD ALSO BE HELPFUL. OUTLINE OF MODULE 17: What you will learn about in this
Australian Journal of Basic and Applied Sciences
 AENSI Journals Australian Journal of Basic and Applied Sciences ISSN:1991-8178 Journal home page: www.ajbasweb.com An Improved Low Cost Automated Mobile Robot 1 J. Hossen, 2 S. Sayeed, 3 M. Saleh, 4 P.
AENSI Journals Australian Journal of Basic and Applied Sciences ISSN:1991-8178 Journal home page: www.ajbasweb.com An Improved Low Cost Automated Mobile Robot 1 J. Hossen, 2 S. Sayeed, 3 M. Saleh, 4 P.
Advanced Mechatronics 1 st Mini Project. Remote Control Car. Jose Antonio De Gracia Gómez, Amartya Barua March, 25 th 2014
 Advanced Mechatronics 1 st Mini Project Remote Control Car Jose Antonio De Gracia Gómez, Amartya Barua March, 25 th 2014 Remote Control Car Manual Control with the remote and direction buttons Automatic
Advanced Mechatronics 1 st Mini Project Remote Control Car Jose Antonio De Gracia Gómez, Amartya Barua March, 25 th 2014 Remote Control Car Manual Control with the remote and direction buttons Automatic
Course: STEM Robotics Engineering Total Framework Hours up to: 600 CIP Code: Exploratory Preparatory
 Camas School District Framework: Introductory Robotics Course: STEM Robotics Engineering Total Framework Hours up to: 600 CIP Code: 150405 Exploratory Preparatory Date Last Modified: 01/20/2013 Career
Camas School District Framework: Introductory Robotics Course: STEM Robotics Engineering Total Framework Hours up to: 600 CIP Code: 150405 Exploratory Preparatory Date Last Modified: 01/20/2013 Career
The Texas 4-H Roundup Robotics Challenge Invitational
 LAST REVISION 9/15 The Texas 4-H Roundup Robotics Challenge Invitational Robots are all around us. From the food we eat to the cars we drive, robots help make our lives easier and more efficient. The field
LAST REVISION 9/15 The Texas 4-H Roundup Robotics Challenge Invitational Robots are all around us. From the food we eat to the cars we drive, robots help make our lives easier and more efficient. The field
Mobile robots. The Simplified Electronics of a Mobile Robot. (Control, Communication, Motors and Drives) (without sensory system)
 (without sensory system)") Mobile robots The Simplified Electronics of a Mobile Robot (Control, Communication, Motors and Drives) (without sensory system) Components: Electrical Components of Mobile Robots: Control System: processors,
Mobile robots The Simplified Electronics of a Mobile Robot (Control, Communication, Motors and Drives) (without sensory system) Components: Electrical Components of Mobile Robots: Control System: processors,
Roborodentia Final Report
 California Polytechnic State University, SLO College of Engineering Computer Engineering Program Roborodentia Final Report Submitted by: Zeph Nord, Mitchell Myjak, Trevor Gesell June 2018 Faculty Advisor:
California Polytechnic State University, SLO College of Engineering Computer Engineering Program Roborodentia Final Report Submitted by: Zeph Nord, Mitchell Myjak, Trevor Gesell June 2018 Faculty Advisor:
Hardware Implementation of an Explorer Bot Using XBEE & GSM Technology
 Volume 118 No. 20 2018, 4337-4342 ISSN: 1314-3395 (on-line version) url: http://www.ijpam.eu ijpam.eu Hardware Implementation of an Explorer Bot Using XBEE & GSM Technology M. V. Sai Srinivas, K. Yeswanth,
Volume 118 No. 20 2018, 4337-4342 ISSN: 1314-3395 (on-line version) url: http://www.ijpam.eu ijpam.eu Hardware Implementation of an Explorer Bot Using XBEE & GSM Technology M. V. Sai Srinivas, K. Yeswanth,
Revision for Grade 7 in Unit #1&3
 Your Name:.... Grade 7 / SEION 1 Matching :Match the terms with its explanations. Write the matching letter in the correct box. he first one has been done for you. (1 mark each) erm Explanation 1. electrical
Your Name:.... Grade 7 / SEION 1 Matching :Match the terms with its explanations. Write the matching letter in the correct box. he first one has been done for you. (1 mark each) erm Explanation 1. electrical
I. INTRODUCTION MAIN BLOCKS OF ROBOT
 Stair-Climbing Robot for Rescue Applications Prof. Pragati.D.Pawar 1, Prof. Ragini.D.Patmase 2, Mr. Swapnil.A.Kondekar 3, Mr. Nikhil.D.Andhare 4 1,2 Department of EXTC, 3,4 Final year EXTC, J.D.I.E.T Yavatmal,Maharashtra,
Stair-Climbing Robot for Rescue Applications Prof. Pragati.D.Pawar 1, Prof. Ragini.D.Patmase 2, Mr. Swapnil.A.Kondekar 3, Mr. Nikhil.D.Andhare 4 1,2 Department of EXTC, 3,4 Final year EXTC, J.D.I.E.T Yavatmal,Maharashtra,
Activity Template. Subject Area(s): Science and Technology Activity Title: Header. Grade Level: 9-12 Time Required: Group Size:
: Science and Technology Activity Title: Header. Grade Level: 9-12 Time Required: Group Size:") Activity Template Subject Area(s): Science and Technology Activity Title: What s In a Name? Header Image 1 ADA Description: Picture of a rover with attached pen for writing while performing program. Caption:
Activity Template Subject Area(s): Science and Technology Activity Title: What s In a Name? Header Image 1 ADA Description: Picture of a rover with attached pen for writing while performing program. Caption:
Smart-M3-Based Robot Interaction in Cyber-Physical Systems
 FRUCT 16, Oulu, Finland October 30, 2014 Smart-M3-Based Robot Interaction in Cyber-Physical Systems Nikolay Teslya *, Sergey Savosin * * St. Petersburg Institute for Informatics and Automation of the Russian
FRUCT 16, Oulu, Finland October 30, 2014 Smart-M3-Based Robot Interaction in Cyber-Physical Systems Nikolay Teslya *, Sergey Savosin * * St. Petersburg Institute for Informatics and Automation of the Russian
Chapter 1 - Introduction to Mechatronics. Questions
 Instant download and all chapters Solution Manual Fundamentals of Mechatronics 1st Edition Jouaneh https://testbankdata.com/download/solution-manual-fundamentalsmechatronics-1st-edition-jouaneh/ 1.1 What
Instant download and all chapters Solution Manual Fundamentals of Mechatronics 1st Edition Jouaneh https://testbankdata.com/download/solution-manual-fundamentalsmechatronics-1st-edition-jouaneh/ 1.1 What
Workshop 9: First steps in electronics
 King s Maths School Robotics Club Workshop 9: First steps in electronics 1 Getting Started Make sure you have everything you need to complete this lab: Arduino for power supply breadboard black, red and
King s Maths School Robotics Club Workshop 9: First steps in electronics 1 Getting Started Make sure you have everything you need to complete this lab: Arduino for power supply breadboard black, red and
Sensors and Motor Control Lab Individual lab report #1 October 16, 2015
 Sensors and Motor Control Lab Individual lab report #1 October 16, 2015 RICHA VARMA Team I Dorothy Kirlew Pranav Maheshwari Shivam Gautam Mohak Bharadwaj 1. Individual Progress The tasks undertaken by
Sensors and Motor Control Lab Individual lab report #1 October 16, 2015 RICHA VARMA Team I Dorothy Kirlew Pranav Maheshwari Shivam Gautam Mohak Bharadwaj 1. Individual Progress The tasks undertaken by
Differential Mobile Robot Controller Study: A Low Cost Experiment Based on a Small Arduino Based Prototype
 017 5th Mediterranean Conference on Control and Automation (MED) July 3-6, 017. Valletta, Malta Differential Mobile Robot Controller Study: A Low Cost Experiment Based on a Small Arduino Based Prototype
017 5th Mediterranean Conference on Control and Automation (MED) July 3-6, 017. Valletta, Malta Differential Mobile Robot Controller Study: A Low Cost Experiment Based on a Small Arduino Based Prototype
RAPID PROTOTYPING AND EMBEDDED CONTROL FOR AN ANTHROPOMORPHIC ROBOTIC HAND
 The 3rd International Conference on Computational Mechanics and Virtual Engineering COMEC 2009 29 30 OCTOBER 2009, Brasov, Romania RAPID PROTOTYPING AND EMBEDDED CONTROL FOR AN ANTHROPOMORPHIC ROBOTIC
The 3rd International Conference on Computational Mechanics and Virtual Engineering COMEC 2009 29 30 OCTOBER 2009, Brasov, Romania RAPID PROTOTYPING AND EMBEDDED CONTROL FOR AN ANTHROPOMORPHIC ROBOTIC
FLL Coaches Clinic Chassis and Attachments. Patrick R. Michaud
 FLL Coaches Clinic Chassis and Attachments Patrick R. Michaud pmichaud@pobox.com Erik Jonsson School of Engineering and Computer Science University of Texas at Dallas September 23, 2017 Presentation Outline
FLL Coaches Clinic Chassis and Attachments Patrick R. Michaud pmichaud@pobox.com Erik Jonsson School of Engineering and Computer Science University of Texas at Dallas September 23, 2017 Presentation Outline
A comparisonal study on robot arm in terms of light weight handling
 Proceedings of the International Conference on Mechanical Engineering and Renewable Energy 2017 (ICMERE2017) 18 20 December, 2017, Chittagong, Bangladesh ICMERE2017-PI-208 A comparisonal study on robot
Proceedings of the International Conference on Mechanical Engineering and Renewable Energy 2017 (ICMERE2017) 18 20 December, 2017, Chittagong, Bangladesh ICMERE2017-PI-208 A comparisonal study on robot
Introduction to the VEX Robotics Platform and ROBOTC Software
 Introduction to the VEX Robotics Platform and ROBOTC Software Computer Integrated Manufacturing 2013 Project Lead The Way, Inc. VEX Robotics Platform: Testbed for Learning Programming VEX Structure Subsystem
Introduction to the VEX Robotics Platform and ROBOTC Software Computer Integrated Manufacturing 2013 Project Lead The Way, Inc. VEX Robotics Platform: Testbed for Learning Programming VEX Structure Subsystem
VOICE CONTROLLED ROBOT WITH REAL TIME BARRIER DETECTION AND AVERTING
 VOICE CONTROLLED ROBOT WITH REAL TIME BARRIER DETECTION AND AVERTING P.NARENDRA ILAYA PALLAVAN 1, S.HARISH 2, C.DHACHINAMOORTHI 3 1Assistant Professor, EIE Department, Bannari Amman Institute of Technology,
VOICE CONTROLLED ROBOT WITH REAL TIME BARRIER DETECTION AND AVERTING P.NARENDRA ILAYA PALLAVAN 1, S.HARISH 2, C.DHACHINAMOORTHI 3 1Assistant Professor, EIE Department, Bannari Amman Institute of Technology,
Wheeled Mobile Robot Obstacle Avoidance Using Compass and Ultrasonic
 Universal Journal of Control and Automation 6(1): 13-18, 2018 DOI: 10.13189/ujca.2018.060102 http://www.hrpub.org Wheeled Mobile Robot Obstacle Avoidance Using Compass and Ultrasonic Yousef Moh. Abueejela
Universal Journal of Control and Automation 6(1): 13-18, 2018 DOI: 10.13189/ujca.2018.060102 http://www.hrpub.org Wheeled Mobile Robot Obstacle Avoidance Using Compass and Ultrasonic Yousef Moh. Abueejela
MAKEVMA502 BASIC DIY KIT WITH ATMEGA2560 FOR ARDUINO USER MANUAL
 BASIC DIY KIT WITH ATMEGA2560 FOR ARDUINO USER MANUAL USER MANUAL 1. Introduction To all residents of the European Union Important environmental information about this product This symbol on the device
BASIC DIY KIT WITH ATMEGA2560 FOR ARDUINO USER MANUAL USER MANUAL 1. Introduction To all residents of the European Union Important environmental information about this product This symbol on the device
RoboTurk 2014 Team Description
 RoboTurk 2014 Team Description Semih İşeri 1, Meriç Sarıışık 1, Kadir Çetinkaya 2, Rüştü Irklı 1, JeanPierre Demir 1, Cem Recai Çırak 1 1 Department of Electrical and Electronics Engineering 2 Department
RoboTurk 2014 Team Description Semih İşeri 1, Meriç Sarıışık 1, Kadir Çetinkaya 2, Rüştü Irklı 1, JeanPierre Demir 1, Cem Recai Çırak 1 1 Department of Electrical and Electronics Engineering 2 Department
Gesture Controlled Robotics Workshop
 2-Days National Level Gesture Controlled Robotics Workshop Championship-2018 Page 17 Projects To Be Covered: - Black Line Follower White Line Follower Edge Avoider Robot Wall Follower Gesture Controlled
2-Days National Level Gesture Controlled Robotics Workshop Championship-2018 Page 17 Projects To Be Covered: - Black Line Follower White Line Follower Edge Avoider Robot Wall Follower Gesture Controlled